
Submitted:
21 January 2025
Posted:
22 January 2025
You are already at the latest version
Abstract
The research proposes a method to reduce the dimension of the coefficient vector for Crank-Nicolson mixed finite element (CNMFE) solutions to solve the fourth-order variable coefficient parabolic equation. Initially, the CNMFE schemes and corresponding matrix schemes for the equation are established, followed by a thorough discussion of the uniqueness, stability, and error estimates for the CNMFE solutions. Next, a matrix-form reduced-dimension CNMFE (RDCNMFE) method is developed utilizing Proper Orthogonal Decomposition (POD) technology, with an in-depth discussion on the uniqueness, stability, and error estimates of the RDCNMFE solutions. The reduced-dimension method employ identical basis functions compared to standard CNMFE methods. It significantly reduces the number of unknowns in the computations, thereby effectively decreasing computational time, while there is no loss of accuracy. Finally, the viability and proficiency are substantiated by examining two numerical experiments.
Keywords:
proper orthogonal decomposition
; Crank-Nicolson mixed finite element
; stability
; error estimates
; numerical experiments
; fourth-order parabolic equation
1. Introduction
The research focuses on exploring the fourth-order variable coefficient parabolic equation with the initial-boundary value
is a bounded convex polygonal domain. is boundary of . . is known initial function. , satisfying
for some positive constants , , , and . is a positive constant. adheres to the properties of Lipschitz continuity, implying the existence of a positive constant satisfying
For simplicity, we assume that in the following theoretical analysis.
The fourth-order parabolic equations are commonly used to describe higher-order physical behaviors, such as considering the internal damping or viscoelastic properties of materials. Within the category of fourth-order parabolic equations, models such as the Cahn-Hilliard equation [1,2], fourth-order reaction-diffusion equation [3,4], and the Swift-Hohenberg equation [5] are included. Due to the inclusion of higher-order derivatives, solving and analyzing these kinds of equations is usually more complex and often requires the use of numerical methods. Currently, various numerical methods have been employed to solve fourth-order parabolic equations. For example, finite element (FE) method [1,6,7], mixed finite element method (MFE) [3,8,9,10], discontinuous space-time MFE method [11,12], two-grid MFE method [13,14], weak galerkin FE method [2,15], finite difference method [16], implicit compact difference method [17,18,19,20], cubic spline method [21], blow-up [22,23,24,25] and so on. In the paper, the MFE method is employed to study the fourth-order variable coefficient parabolic equation for spatial analysis. The method of time discretization is the Crank-Nicolson (CN) scheme.
A prevalent challenge in addressing high-order partial differential equations (PDEs) through the MFE method is the rapid escalation of unknown dimensions when dealing with coupled equations, often resulting in a doubling of the data volume processed. Such significantly elevated dimensions not only heighten memory requirements but also substantially escalate computational costs. In practical scenarios, this increased computational burden can pose a significant barrier to solving complex PDE problems. An effective strategy to mitigate these challenges involves the implementation of order reduction techniques. The primary objective of these techniques is to minimize the number of variables considered during the solution process using mathematical methods, thereby alleviating computational demands while preserving as much as possible a good approximation quality. Currently, several effective numerical reduced-order methods have gained widespread application, including the POD method [26,27], the spectral element method [28] , the sparse grid method [29], and the balanced truncation method [30] .
Certainly, integrating POD technology with diverse numerical methods can effectively address a range of PDEs. It is the most widely utilized method for dimensionality reduction and has been attracting increasing attention. [31] and [32] combined the compact difference method and POD technique to study the fourth-order parabolic equation. Zhao and Piao [33] studied the KDV-RLW-Rosenau equation using the POD method in conjunction with B-spline Galerkin FE formulations. In [34], the heat equation was addressed using the POD reduced-order methods and the two-step backward differentiation formula (BDF2). Janes and Singler [35] solved the damped wave equation by the POD method and the second difference quotients (DDQs). He et al. [36] employed a space-time FE method that integrates a POD-based extrapolation with DG time stepping to analyze the parabolic equation. Lu et al. [37] merged the POD method with a collocation approach using local radial basis functions (RBFs) to address time-dependent nonlocal diffusion problems.
For the POD-based FE and MFE reduced-dimension models, there are two existing methods. The first involves establishing optimized models which reduce the dimensions of the FE or the MFE subspaces. For further references, please consult [38,39,40,41,42,43,44]. The second, introduced by Luo et al. in 2020, presented an innovative strategy for dimension reduction of CNFE [45,46] and CNMFE [47,48,49,50,51] solution coefficient vectors. To our understanding, no existing literature has documented simplifying the solution coefficient vectors of CNMFE scheme used POD technology in solving fourth-order variable coefficient parabolic equations. The paper primary objective presents a rapid algorithm capable of solving fourth-order variable coefficient parabolic equations.
The research is organized as follows: Section 2 discusses the CNMFE scheme, detailing its uniqueness, stability, and convergence. Section 3 dedicates to construct a POD-based RDCNMFE matrix model, while also analyze its uniqueness, stability, and error estimates. In Section 4, we perform numerical simulations on 2D fourth-order variable coefficient parabolic equations. Finally, Section 5 summarizes the key results and conclusions of the research.
2. The CNMFE Method for the Fourth-Order Variable Coefficient Parabolic Equation
2.1. The CNMFE Scheme
In this paper, the Sobolev spaces and the associated norms adhere to the conventional definitions commonly found in existing literature [52]. To construct the CNMFE scheme for the fourth-order variable coefficient parabolic equation (1), we begin by introducing a diffusion term defined as . This introduces a pair of lower-order equations
Applying Green’s formula, we obtain the mixed weak form of (4) as provided below.
Problem 1.
Find : , such that
Let represent the quasi-uniform triangulation on . The FE subspace is defined as the following span of the orthonormal basis
where is a polynomial space of degree.
For a positive integer N, define , , and . Hence, Problem 1 can be reformulated at time as follows.
The equivalent equation is that
where
When , define the CNMFE approximations of as . Therefore, we can formulate the CNMFE scheme of Problem 1 using the form below.
Problem 2.
For , find , such that
Remark 1.
[50], Formula (12) Using the linearized term
it is evident that equation (12) structured as a linear scheme.
2.2. The Uniqueness, Stability and Error Estimates of the CNMFE Solutions
Utilizing the orthonormal basis of the FE space , the CNMFE approximations to Problem 2 can be expressed as
in which is the orthonormal basis function vector.
and represent the unknown CNMFE solution coefficient vectors. With the solutions defined in (14), the matrix-form of Problem 2 is as follows.
Problem 3.
For , find and that satisfy
where
and
Theorem 1.
Given that is small enough, the Problem 3 has the unique CNMFE solutions .
Proof of Theorem 1.
Problem 3 can alternatively be expressed as
where denotes the identity matrix, and stands for a zero column vector of .
Due to
where represents the zero matrix. Because is small enough, is invertible. Hence, the coefficient matrix of (16) is invertible, then there exists the unique solutions for Problem 3. □
It is necessary to discuss the characteristics of and in Problem 3 for establishing the stability of the CNMFE solutions.
Lemma 1.
[53], Lemma 1.19 Matrices and are positive definite and satisfy the following properties
Theorem 2.
The CNMFE solutions have unconditional stability.
Proof of Theorem 2.
We represent (15) as
Inserting the second equation of (19) into the first, and considering that is positive definite, we obtain
Letting , and taking the inner product of (20) and , we have
Then, two sides of (21) are that
and
Combining lemma 1 with (3), and considering that and are bounded, we obtain
Combining (22), (23) and (24), we have
Multiplying (25) by , summating from 2 to n and noting that , we have
We apply the Gronwall inequality to (26) to obtain
And because
From (27) and (28), we get
Given that , it easily follows
As indicated by (29) and (30), the CNMFE solution coefficient vectors are bounded, implying that the CNMFE solutions retain unconditional stability.
□
It is essential to define the projection operators and for analyzing the convergence of the CNMFE solutions.
Lemma 2.
The projection , defined by
with the following estimates
Lemma 3.
The projection , defined by
with the following estimates
Errors can be divided for simplifying theoretical analysis as follows
Subtracting (12) from (8) and using (31) and (34) at , the error equations are derived as
The following lemma is presented for deriving error estimates. The lemma can be straightforwardly obtained through Taylor expansion.
Lemma 4.
Based on Lemmas 2, 3 and 4, we can establish the theorems that concern the fully discrete error estimates for the Crank-Nicolson method.
Theorem 3.
Given that the solutions to (5) adhere to regularity conditions with , , . It follows that a positive constant C exists, which does not depend on h and , satisfying
in which .
Proof of Theorem 3.
Taking and in (39) and (40), respectively, we obtain
Subtracting (45) from (44), we have
Multiplying (46) by , summating from , and considering that and , we obtain
For the nonlinear term , from reference [50], we have
Substituting (48) into (47), and using the Gronwall lemma and , we get
Noting that
Substituting (50) and (51) into (49) and combining Lemma 4, we obtain
The proof of (43) is effectively completed combining Lemma 2, 3, (52), and the triangle inequality.
□
Theorem 4.
With and , given that the solutions to (5) adhere to regularity conditions with , , . It follows that a positive constant C exists, which does not depend on h and , satisfying
Proof of Theorem 4.
From (40) we can get
Taking and in (39) and (54), respectively, we obtain
From (55), we have
so
Substituting (58) into (56) yields
Multiplying (59) by , summating from and employing (50) and (51), we get
Using the Gronwall Lemma and (48),we have
Substitute (52) and Lemma 4 into (61), we get
We complete the proof combining Lemma 2, 3, (62) and the triangle inequality. □
3. The POD-Based RDCNMFE Method for the Fourth-Order Variable Coefficient Parabolic Equation
3.1. Structure of POD Bases
Initially, computing the first -step coefficient vectors by Problem 3, the snapshot matrices and are generated. Next, we compute the eigenvalues and eigenvectors of matrices . Organize the eigenvalues as . The eigenvectors form the eigenmatrix . Lastly, the initial d vectors of are selected as POD bases , such that
in which and for vector . For , it follows that
, the nth component being 1, named unit vectors. Consequently, are optimal POD bases.
Remark 2.
It is obvious that the order of the matrices is significantly greater than the order of the matrices . However, their positive eigenvalues are same, we can compute the first d eigenvalues and eigenvectors of the matrices . Then, we can derive the eigenvectors for through the relationships . This approach facilitates the creation of POD bases .
3.2. The RDCNMFE Scheme
Initially, we let and , and define the RDCNMFE solution coefficient vectors as follows: and . Next, the first RDCNMFE solution coefficient vectors are promptly derived using and , for , as outlined in section 3.1. Finally, for subsequent time steps , we employ and , replacing the original CNMFE solution vectors in Problem 3. This allows us to develop the following RDCNMFE matrix scheme.
Problem 4.
Find and , such that
Here, denotes the first solution vectors of Problem 3. The definitions of matrix , , and vector , along with the FE basis vectors are detailed in section 2.2.
3.3. The Uniqueness, Stability and Error Estimate of the RDCNMFE Solutions
Theorem 5.
With the assumptions laid out in Theorem 3 and 4, we consider as the solutions of Problem 1, and as reduced-dimension solutions of Problem 4. Then the RDCNMFE solutions are both unique and unconditionally stable for , and have the error estimate as follows.
Proof of Theorem 5.
- (1)
-
Demonstrate the uniqueness.For , Theorem 1 ensures that the solutions in problem 3 are unique. Consequently, the corresponding solutions , derived from the first and fourth expressions of problem 4, also have uniqueness.For , by applying and , the last three equations of Problem 4 are reformulated asFor , the solutions in Problem 3 are unique. Because adhere to the identical structure as problem 3, the solutions for also have uniqueness.
- (2)
-
Analyse the stability.(i) When .Applying Theorem 2 and considering the orthonormality of the vectors in and , it follows that(ii) When .From the positive definite symmetry of matrix , (68) can be reformulated asSubstituting (69) into (72), and since is positive definite, we obtainLetting , and taking the inner product of (73) and , we haveThen, two sides of (74) are thatandSimilar to (24), we obtainCombining (75), (76) and (77), we haveMultiplying (78) by and summating from 2 to n, it follows thatNoting thatputting (80) into (79), we haveUsing the Gronwall inequality for (81),AndSo we getBecause of , we getBased on (71) and (85), we can conclude that the solutions exhibit unconditional stability.
- (3)
-
Discuss the error estimates.(i) For .According to (64) and (65), and considering , we obtain(ii) For .Defining and , and combining (19), (72) and (69), we obtainPutting (88) into (87), and since is positive definite, we haveLetting , we obtainTaking the inner product of (90) and ,Then, two sides of (91) are thatandUsing Lemma 1 and (3), we can estimate the first term of (93) as followsCombining (92), (93) and (94), we haveMultiplying (95) by and summating from to , it follows thatNoting thatPutting (97) into (96), from (64) and (65), we haveApplying the Gronwall’s inequality for (98),Andthus, we getBecause of , we haveCombining the triangle inequality, with Theorem 3 and 4, (86) and (102), we obtain
□
4. The Numerical Experiments for the Fourth-Order Parabolic Equations
The efficiency of the proposed method is validated by two numerical examples. We compare the reduced-dimension scheme with the standard CNMFE scheme in terms of errors, convergence orders, and CPU runtime. For the purpose of analysis, we conduct experiments on the specified fourth-order parabolic equation.
Solving Problem 3 gets the standard CNMFE solutions . In order to get the RDCNMFE solutions , the four steps are as follows.
- Step 1:
- In order to generate the snapshot matrices and , the initial CNMFE solution vectors are calculated out by Problem 3.
- Step 2:
- Calculate the eigenvalues of the matrix and arrange them in descending order, along with their corresponding eigenvectors .
- Step 3:
- By calculating, it is observed that . From the matrix , the first 6 eigenvectors can be selected. Applying the formula , we construct the POD bases .
- Step 4:
- Inserting the result into Problem 4 and calculating the RDCNMFE solutions.
Example 1.
We consider the model in with the exact solution . Choosing , , the source term is
Since , the exact solution of q is .
When , with and , we get the standard CNMFE solutions and RDCNMFE solutions. They are compared with the exact solutions, as shown in Figure 1 and Figure 2. Obviously, both methods simulate the exact solutions very well.
When and , so as to enable easier comparison, we use both methods to compute the error and convergence order of , as shown in Table 1 and Table 2.
When , with and , we record the error obtained and the CPU runtime required using both methods to further examing the efficacy of the POD-based RDCNMFE method, as shown in Table 3. The data indicates that both methods obtain the same errors. With each incremental second, the conventional CNMFE method increases by approximately 260 seconds, whereas the RDCNMFE method only increases just over 10 seconds.
Example 2.
We explore the model in with the exact solution . Letting , , the source term is
The exact solution of q is .
When , setting and , we employ the CNMFE and RDCNMFE methods to obtain the numerical solutions for equation that has the noted source term . Both solutions of are compared with the exact solutions. It can be seen clearly from Figure 3 and Figure 4 that both solutions closely approximate the exact solutions.
When , setting and , we compute the CNMFE and RDCNMFE solutions of . Then we get the errors and convergence orders of both methods, as shown in Table 4 and Table 5. Figure 5 and Figure 6 provide the comparison of error results of when . The figures demonstrates that when is set to a very small value, such as , although the solutions obtained by both methods are convergent, their associated errors tend to increase.
For purpose of demonstrating the effectiveness of the POD-based reduce-dimension method, we need to compare the CPU runtime of both methods. When
, with and , we calculate the CNMFE and RDCNMFE solutions. Then we recorded the CPU runtime required using both methods in Table 6. Evidenced in Table 6, using the CNMFE method, the CPU runtime increases by about 130 seconds for every additional second. However, applying the RDCNMFE method, it takes just a few seconds for every added second. The significant reduction in CPU runtime using the reduced-dimension method can be attributed to the difference in degrees of freedom at each time node. Specifically, the standard CNMFE method is calculated with degrees of freedom, while the RDCNMFE method just has degrees of freedom.
From the numerical results obtained from the above provided examples, it is evident that the RDCNMFE method based on POD serves as an efficient numerical technique for addressing the fourth-order variable coefficient parabolic equations.
5. Conclusions
In this research, our focus was on reducing dimension of solution coefficient vectors employing the CNMFE method combined with POD technique for the nonlinear variable coefficient fourth-order parabolic equation. Firstly, we developed a CNMFE scheme for the equations. We extensively analyzed the uniqueness, stability, and error estimates of the CNMFE solutions. Subsequently, the POD bases was derived from the initial CNMFE solution coefficient vectors. We constructed a reduced-dimension matrix model and applied conventional FE analysis techniques in order to study the uniqueness, stability and convergence of the RDCNMFE solutions. Furthermore, we conducted detailed numerical experiments to compare the efficacy of both methods. The RDCNMFE method exhibited a reduced number of degrees of freedom at each time nodes compared to the conventional CNMFE method. This feature significantly reduces the computational load of the RDCNMFE method, thereby decreasing the runtime. Notably, this study has streamlined the calculations by linearizing the nonlinear terms, thereby eliminating repetitive numerical iterations. Thus, the RDCNMFE method emerges as an innovative and efficient numerical approach for addressing complex nonlinear PDEs.
In the following study, the method will be extended to more high-order PDEs, such as the fractional fourth-order PDEs, the Schrödinger equation with fourth-order disturbance term and so on. Additionally, we believe this method can be adapted to more complex problems.
Author Contributions
Conceptualization, X.C. and H.L.; methodology, X.C.; numerical simulation, X.C.; formal analysis, X.C.; writing—original draft preparation, X.C.; validation, X.C. and H.L.; writing—review, H.L.; supervision, H.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (12161063) and the Program for Innovative Research Team in Universities of Inner Mongolia Autonomous Region (NMGIRT2207).
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Acknowledgments
The authors would like to thank the reviewers and editors for their invaluable comments, which greatly refined the content of this article.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| POD | proper orthogonal decomposition |
| CNMFE | Crank-Nicolson mixed finite element |
| RDCNMFE | reduced-dimension Crank-Nicolson mixed finite element |
References
- Zhang, T. Finite element analysis for Cahn-Hilliard equation. Math. Numer. Sin. 2006, 28, 281-292. (in Chinese).
- Chai S, Wang Y , Zhao W ,et al. A C0 weak Galerkin method for linear Cahn-Hilliard-Cook equation with random initial condition. Appl. Math. Comput. 2022, 126659.
- Danumjaya, P., Pani, A.K. Mixed finite element methods for a fourth order reaction diffusion equation. Numer. Methods Partial Differ. Equ. 2012, 28, 1227-1251. [CrossRef]
- Tian J., He M., Sun P. Energy-stable finite element method for a class of nonlinear fourth-order parabolic equations. J. Comput. Appl. Math. 2024, 438, 115576. [CrossRef]
- Zhao X., Yang R., Qi R.J., Sun H. Energy stability and convergence of variable-step L1 scheme for the time fractional Swift-Hohenberg model. Fract. Calc. Appl. Anal. 2024, 27, 82-101. [CrossRef]
- Barrett, J.W., Blowey, J.F., Garcke, H. Finite element approximation of a fourth order nonlinear degenerate parabolic equation. Numer. Math. 1998, 80, 525-556. [CrossRef]
- Du S., Cheng Y., Li M. High order spline finite element method for the fourth-order parabolic equations. Appl. Numer. Math. 2023, 184, 496-511. [CrossRef]
- Liu Y., Fang Z.C., Li H., et al. A coupling method based on new MFE and FE for fourth-order parabolic equation. J. Appl. Math. Comput. 2013, 43, 249-269. [CrossRef]
- Liu, Y., Li, H., He, S., Gao, W., Fang, Z.C. H1-Galerkin mixed element method and numerical simulation for the fourth-order parabolic partial differential equations. Math. Numer. Sin. 2012, 34, 259-274. (in Chinese).
- Shi D.Y., Shi Y.H., Wang F.L. Supercloseness and the optimal order error estimates of H1-Galerkin mixed element method for fourth order parabolic equation. Math. Numer. Sin. 2014, 36, 363-380. ( in Chinese).
- Li H., Guo Y. The space-time mixed finite element method for fourth order parabolic problems. Journal of Inner Mongolia University (Natural Science Edition) 2006, 37, 19-22. (in Chinese).
- He S., Li H. The mixed discontinuous space-time finite element method for the fourth order linear parabolic equation with generalized boundary condition. Math. Numer. Sinica. 2009, 31, 167-178. (in Chinese).
- Liu Y., Du Y., Li H., et al. A two-grid mixed finite element method for a nonlinear fourth-order reaction-diffusion problem with time-fractional derivative. Comput. Math. Appl. 2015, 70, 2474-2492. [CrossRef]
- Yin B.L., Liu Y, Li H., et al. TGMFE algorithm combined with some time second-order schemes for nonlinear fourth-order reaction diffusion system. Results. Appl. Math. 2019, 4, 100080. [CrossRef]
- Chai S., Zou Y., Zhou C., et al. Weak Galerkin finite element methods for a fourth order parabolic equation. Numer. Meth. Part. D. E. 2019, 35, 1745-1755. [CrossRef]
- Zhao X., Liu F., Liu B. Finite difference discretization of a fourth-order parabolic equation describing crystal surface growth. Appl. Anal. 2015, 94, 1-15. [CrossRef]
- Mohanty R.K., Kaur D., Singh S. A class of two- and three-level implicit methods of order two in time and four in space based on half-step discretization for two-dimensional fourth order quasi-linear parabolic equations. Appl. Math. Comput. 2019, 352, 68-87.
- Kaur D., Mohanty R.K. Highly accurate compact difference scheme for fourth order parabolic equation with Dirichlet and Neumann boundary conditions: Application to good Boussinesq equation. Appl. Math. Comput. 2020, 378, 125202.
- Gao G., Huang Y., Sun Z. Pointwise error estimate of the compact difference methods for the fourth-order parabolic equations with the third Neumann boundary conditions. Math. Meth. Appl. Sci. 2023, 47, 634-659. [CrossRef]
- Kaur D., Mohanty R.K. High-order half-step compact numerical approximation for fourth-order parabolic PDEs. Numer. Algorithms. 2024, 95, 1127-1153. [CrossRef]
- Sharma S., Sharma N. A fast computational technique to solve fourth-order parabolic equations: application to good Boussinesq, Euler-Bernoulli and Benjamin-Ono equations. Int. J. Comput. Math. 2024, 101, 194-216. [CrossRef]
- Ishige K., Miyake N., Okabe S. Blowup for a Fourth-Order Parabolic Equation with Gradient Nonlinearity. SIAM J. Math. Anal. 2020, 52, 927-953. [CrossRef]
- Ding H., Zhou J. Infinite Time Blow-Up of Solutions to a Fourth-Order Nonlinear Parabolic Equation with Logarithmic Nonlinearity Modeling Epitaxial Growth. Mediterr. J. Math. 2021, 18, 1-19. [CrossRef]
- Shao X., Tang G. Blow-up phenomena for a class of fourth order parabolic equation. J. Math. Anal. Appl. 2021, 505, 125445. [CrossRef]
- Zhao J., Guo B., Wang J. Global existence and blow-up of weak solutions for a fourth-order parabolic equation with gradient nonlinearity. Z. Angew. Math. Phys. 2024, 75, 1-12. [CrossRef]
- Luo Z.D. Finite element and reduced dimension methods for partial differential equations; Springer Singapore: Beijing, China, 2024.
- Luo Z.D., Chen G. Proper Orthogonal Decomposition Methods for Partial Differential Equations; Academic Press of Elsevier: San Diego, CA, USA, 2018.
- Shao W., Chen C. A fourth order Runge-Kutta type of exponential time differencing and triangular spectral element method for two dimensional nonlinear Maxwell’s equations. Appl. Numer. Math. 2025, 207, 348-369. [CrossRef]
- Zeiser A. Sparse grid time-discontinuous Galerkin method with streamline diffusion for transport equations. Part. D. E. Appl. 2023, 4, 38. [CrossRef]
- Jiang S., Cheng Y., Cheng Y., Huang Y. Generalized multiscale finite element method and balanced truncation for parameter-dependent parabolic problems. Mathematics 2023, 11, 4695. [CrossRef]
- Xu B., Zhang X., Ji D. A Reduced High-Order Compact Finite Difference Scheme Based on POD Technique for the Two Dimensional Extended Fisher-Kolmogorov Equation. IAENG Int. J. Appl. Math. 2020, 50, 474-483.
- Li Q., Chen H., Wang H. A proper orthogonal decomposition-compact difference algorithm for plate vibration models. Numer. Algorithms. 2023, 94, 1489-1518. [CrossRef]
- Zhao W., Piao G.R. A reduced Galerkin finite element formulation based on proper orthogonal decomposition for the generalized KDV-RLW-Rosenau equation. J. Inequal. Appl. 2023, 2023, 104. [CrossRef]
- Garcia-Archilla B., John V., Novo J. Second order error bounds for POD-ROM methods based on first order divided differences. Appl. Math. Letters. 2023, 146, 108836. [CrossRef]
- Janes A., Singler R.J. A new proper orthogonal decomposition method with second difference quotients for the wave equation. J. Comput. Appl. Math. 2025, 457, 116279. [CrossRef]
- He S., Li H., Liu Y. A POD based extrapolation DG time stepping space-time FE method for parabolic problems. J. Math. Anal. Appl. 2024, 539, 128501. [CrossRef]
- Lu J., Zhang L., Guo X., Qi Q. A POD based reduced-order local RBF collocation approach for time-dependent nonlocal diffusion problems. Appl. Math. Letters. 2025, 160, 109328. [CrossRef]
- Luo Z.D., Li L., Sun P. A reduced-order MFE formulation based on POD method for parabolic equations. Acta. Math. Sci. 2013, 33B, 1471-1484. [CrossRef]
- Liu Q., Teng F., Luo Z.D. A reduced-order extrapolation algorithm based on CNLSMFE formulation and POD technique for two-dimensional Sobolev equations. Appl. Math. Ser. B. 2014, 29, 171-182. [CrossRef]
- Luo Z.D., Zhou Y.J., Yang X.Z. A reduced finite element formulation based on proper orthogonal decomposition for Burgers equation. Appl. Numer. Math. 2009, 59, 1933-1946. [CrossRef]
- Song J., Rui H. A reduced-order characteristic finite element method based on POD for optimal control problem governed by convection-diffusion equation. Comput. Meth. Appl. M. 2022, 391, 114538. [CrossRef]
- Song J, Rui H. Reduced-order finite element approximation based on POD for the parabolic optimal control problem. Numer. Algorithms. 2024, 95, 1189-1211. [CrossRef]
- Luo Z.D. A POD-Based Reduced-Order Stabilized Crank-Nicolson MFE Formulation for the Non-Stationary Parabolized Navier-Stokes Equations. Math. Model. Anal. 2015, 20, 346-368. [CrossRef]
- Luo Z.D. A POD-based reduced-order TSCFE extrapolation iterative format for two-dimensional heat equations. Bound. Value. Probl. 2015, 2015, 1-15. [CrossRef]
- Luo Z.D. The reduced-order extrapolating method about the Crank-Nicolson finite element solution coefficient vectors for parabolic type equation. Mathematics. 2020, 8, 1261. [CrossRef]
- Zeng Y., Luo Z.D. The reduced-dimension technique for the unknown solution coefficient vectors in the Crank-Nicolson finite element method for the Sobolev equation. J. Math. Anal. Appl. 2022, 513, 126207. [CrossRef]
- Teng F., Luo Z.D. A reduced-order extrapolation technique for solution coefficient vectors in the mixed finite element method for the 2D nonlinear Rosenau equation. J. Math. Anal. Appl. 2020, 485, 123761. [CrossRef]
- Luo Z.D. The dimensionality reduction of Crank-Nicolson mixed finite element solution coefficient vectors for the unsteady Stokes equation. Mathematics. 2022, 10, 2273. [CrossRef]
- Li Y., Teng F., Zeng Y., et al. Two-grid dimension reduction method of Crank-Nicolson mixed finite element solution coefficient vectors for the fourth-order extended Fisher-Kolmogorov equation. J. Math. Anal. Appl. 2024, 536, 128168. [CrossRef]
- Chang, X.; Li, H. The reduced-dimension method for Crank-Nicolson mixed finite element solution coefficient vectors of the extended Fisher-Kolmogorov equation. Axioms. 2024, 13, 710. [CrossRef]
- Zeng Y., Li Y., Zeng Y., et al. The dimension reduction method of two-grid Crank-Nicolson mixed finite element solution coefficient vectors for nonlinear fourth-order reaction diffusion equation with temporal fractional derivative. Commun. Nonlinear. Sci. 2024, 107962.
- Adams R.A. Sobolev Spaces; Academic Press, New York, USA, 1975.
- Luo Z.D. The founfations and applications of mixed finite element methods; Chinese Science Press, Beijing, China, 2006. (in Chinese).
- Wang, J.F.; Li, H.; He, S.; Gao, W.; Liu, Y. A new linearized Crank-Nicolson mixed element scheme for the extended Fisher-Kolmogorov equation. Sci. World J. 2013, 2013, 756281. [CrossRef]
Figure 1.
(a) The exact solution . (b) The CNMFE solution . (c) The RDCNMFE solution .
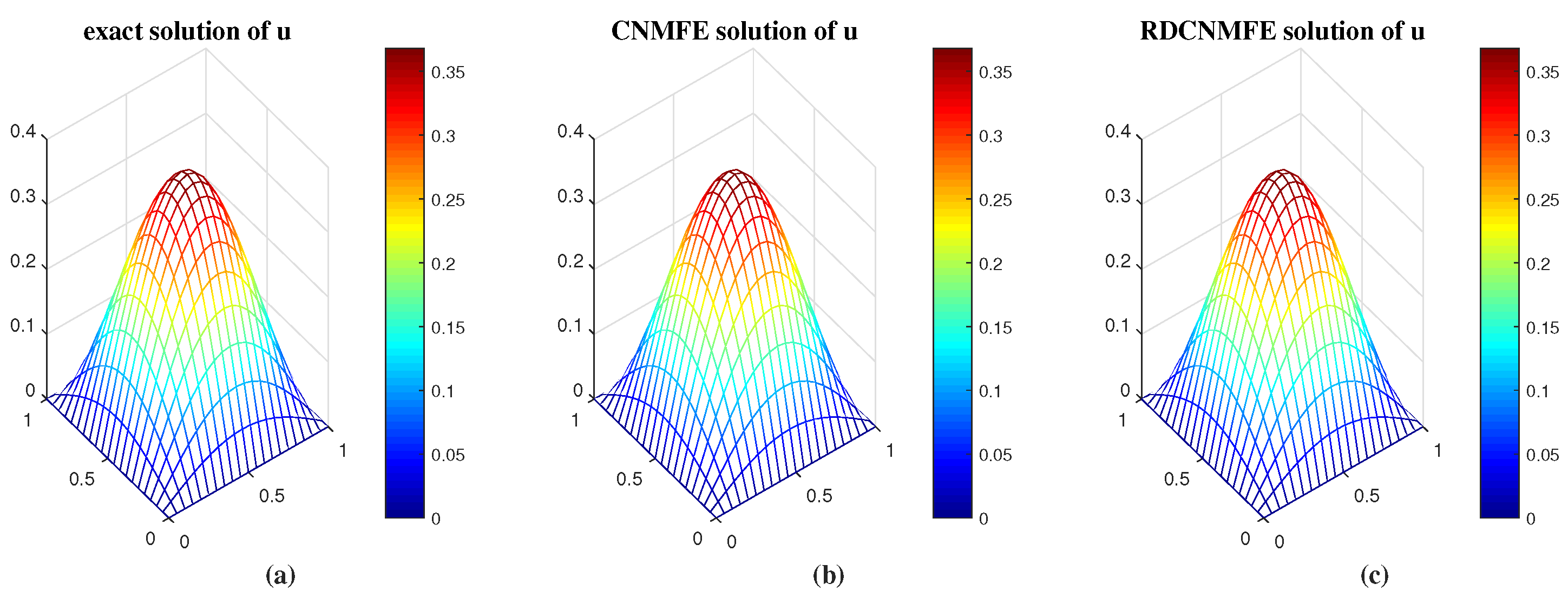
Figure 2.
(a) The exact solution . (b) The CNMFE solution . (c) The RDCNMFE solution .
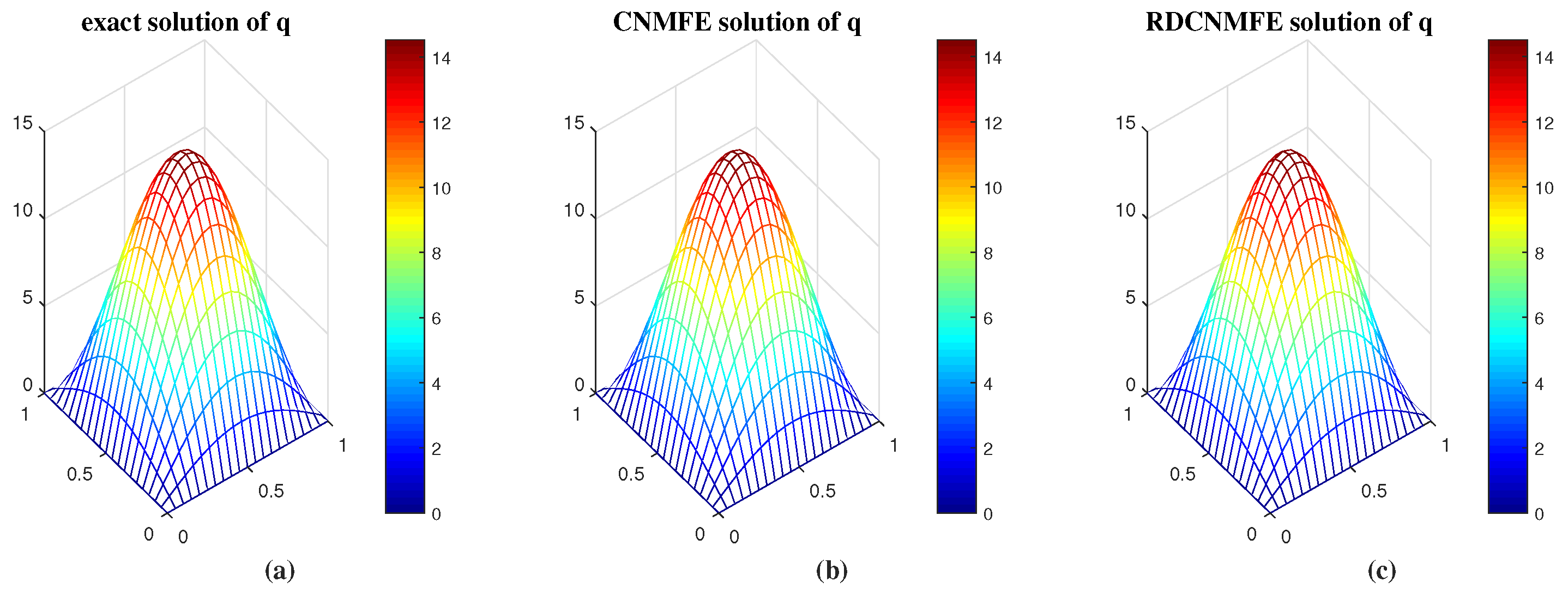
Figure 3.
(a) The exact solution . (b) The CNMFE solution . (c) The RDCNMFE solution .
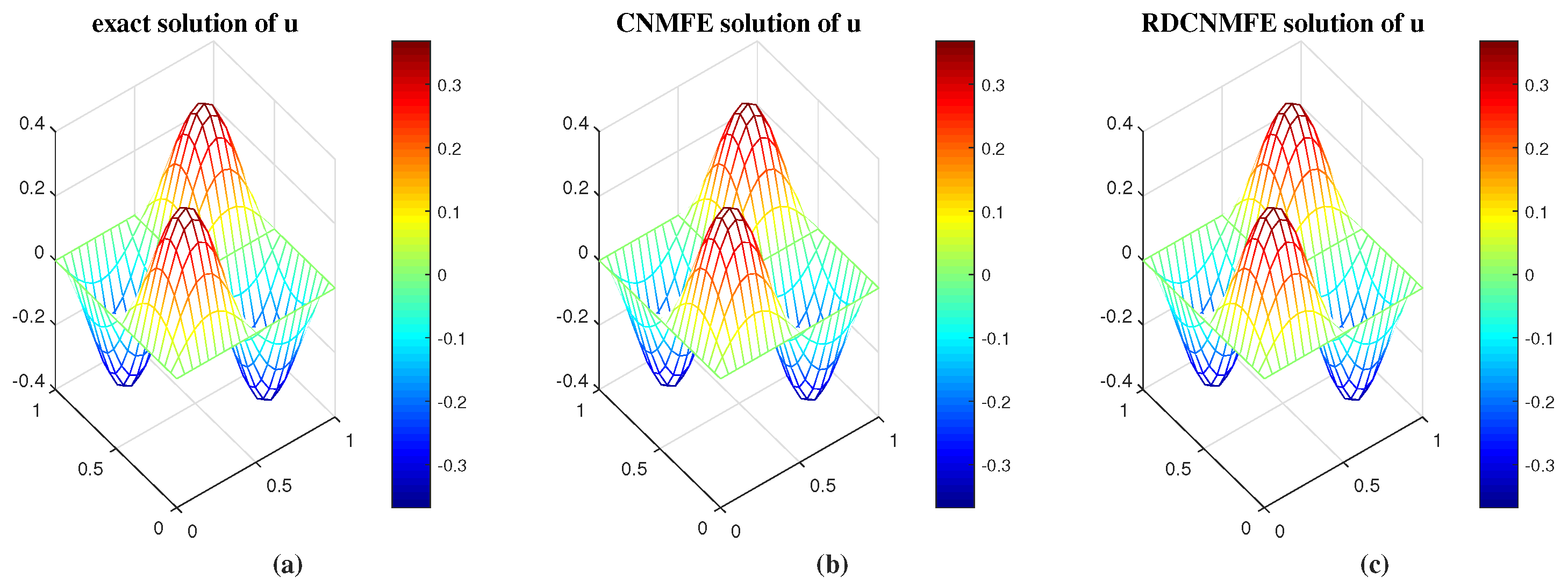
Figure 4.
(a) The exact solution . (b) The CNMFE solution . (c) The RDCNMFE solution .
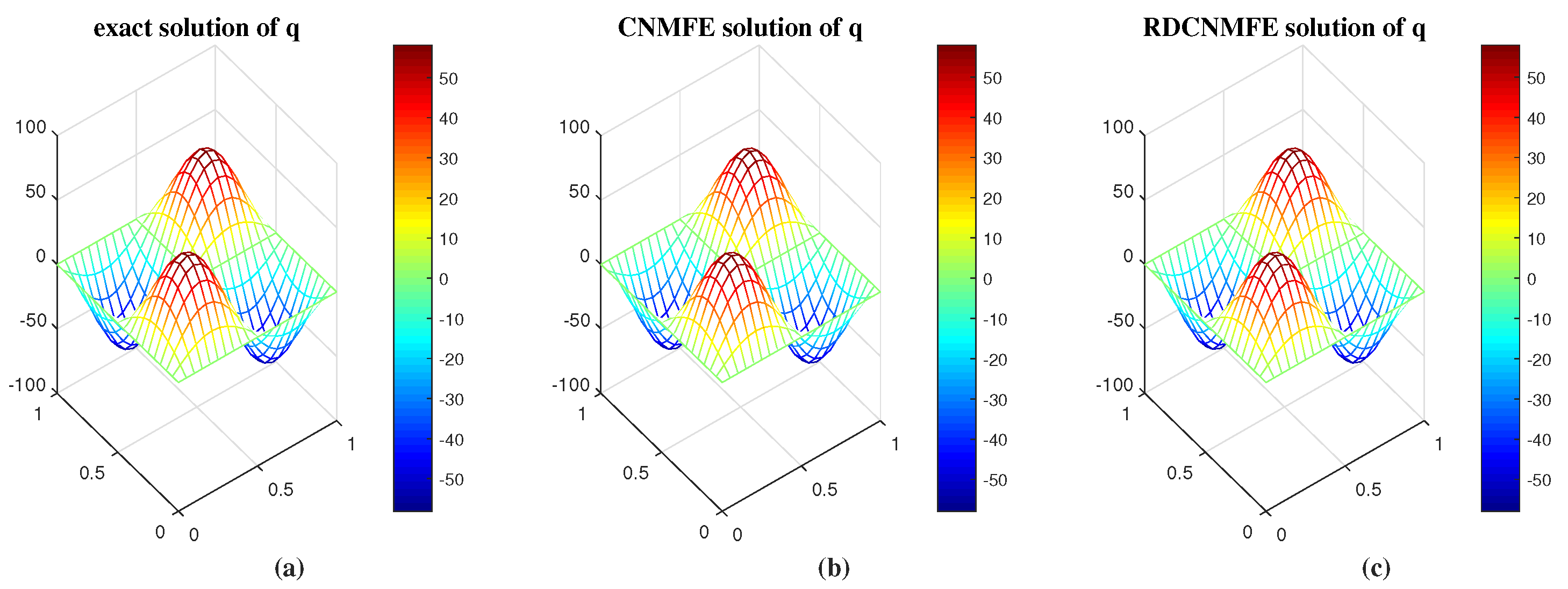
Figure 5.
Comparison of error results of u when .
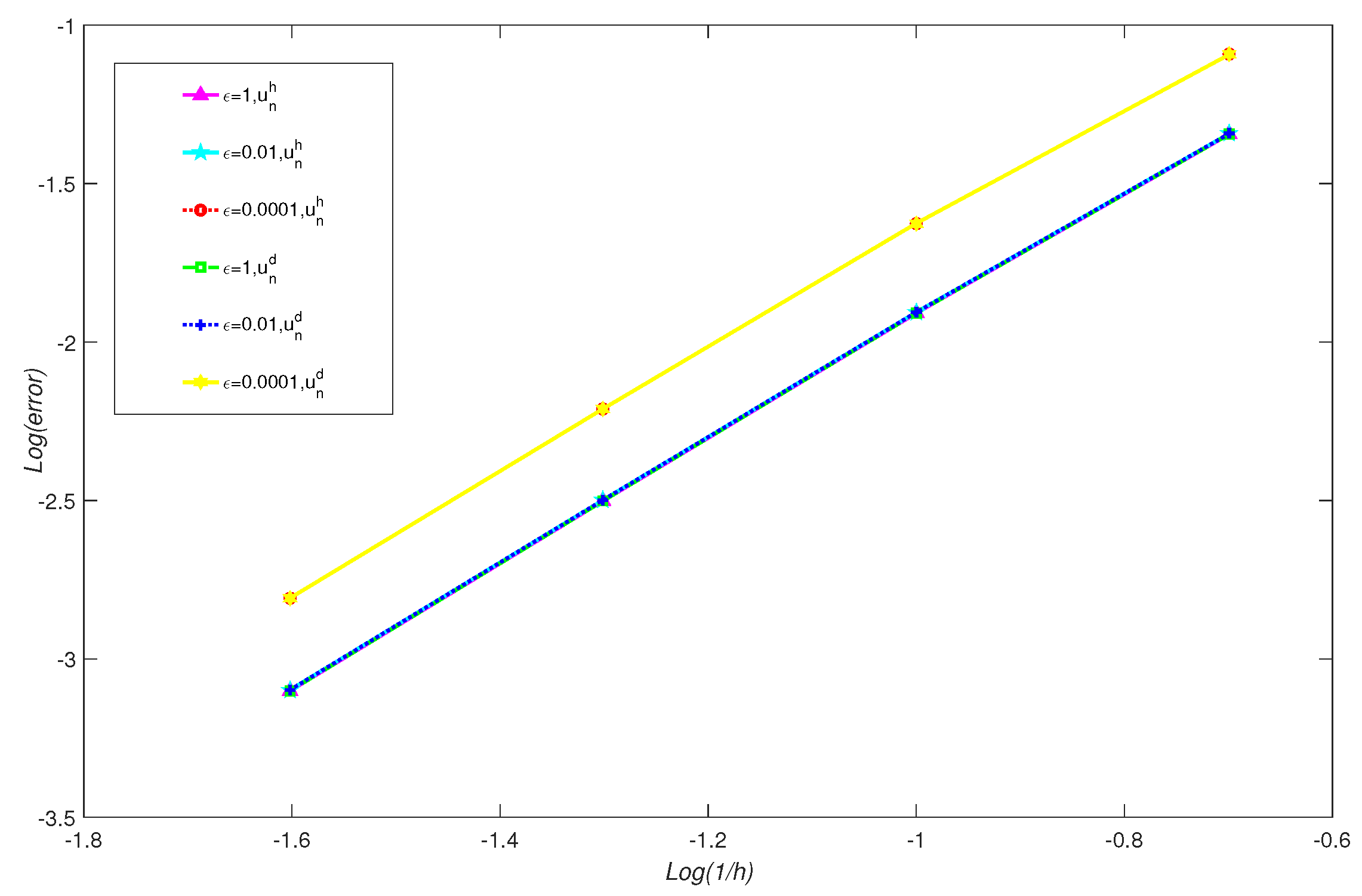
Figure 6.
Comparison of error results of q when .
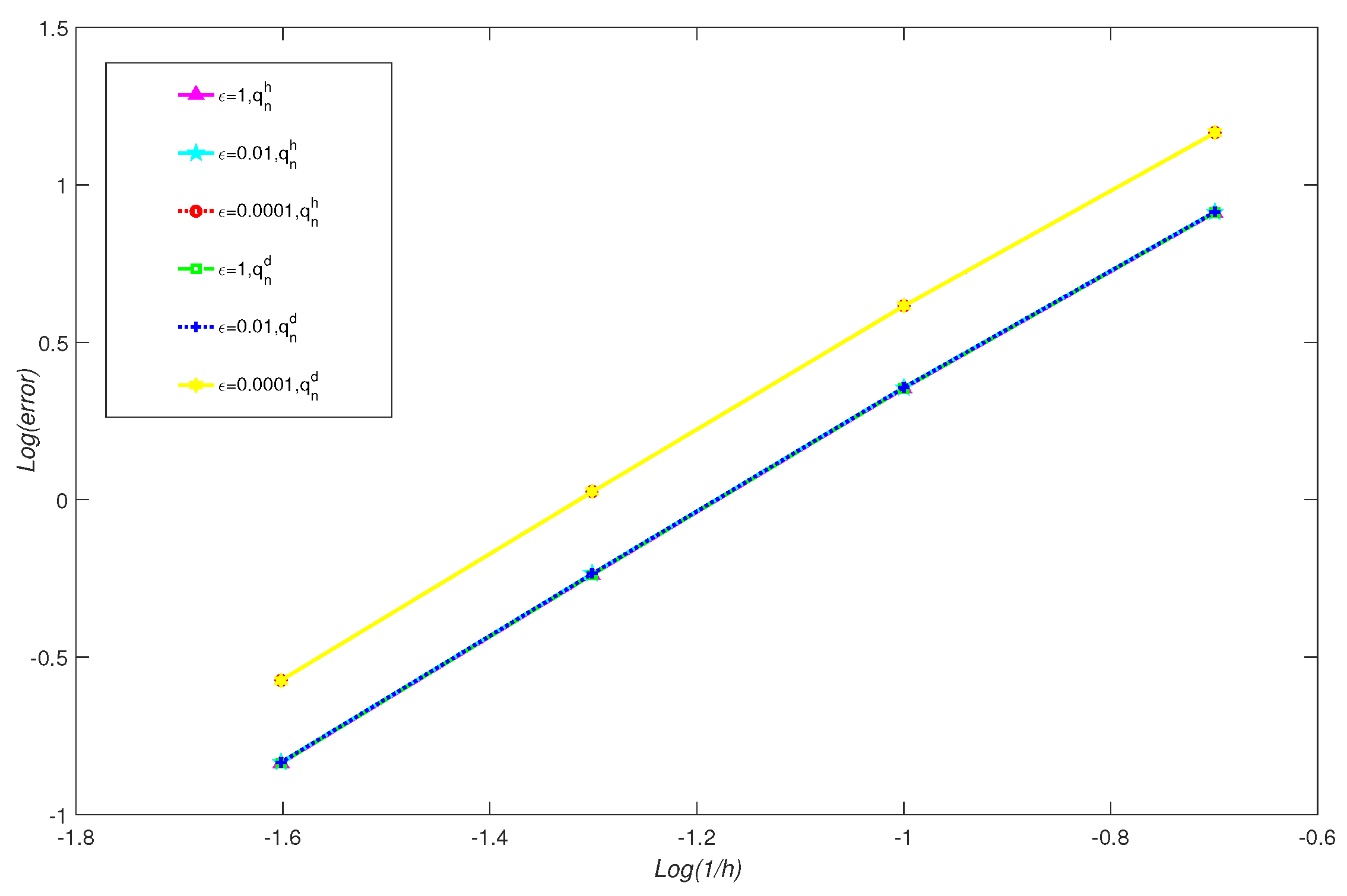

Table 1.
errors and convergence orders between the exact, CNMFE and RDCNMFE solutions of u.
| CNMFE Method | RDCNMFE Method | ||||
|---|---|---|---|---|---|
| Grid | order | order | |||
| 4.0880e-03 | 4.0880e-03 | ||||
| 1.1926e-03 | 1.7773 | 1.1926e-03 | 1.7773 | ||
| 3.1003e-04 | 1.9436 | 3.1003e-04 | 1.9436 | ||
| 7.7556e-05 | 1.9991 | 7.7556e-05 | 1.9991 | ||
Table 2.
errors and convergence orders between the exact, CNMFE and RDCNMFE solutions of q.
| CNMFE Method | RDCNMFE Method | ||||
|---|---|---|---|---|---|
| Grid | order | order | |||
| 1.9183e-01 | 1.9183e-01 | ||||
| 5.5050e-02 | 1.8010 | 5.5050e-02 | 1.8010 | ||
| 1.4248e-02 | 1.9500 | 1.4248e-02 | 1.9500 | ||
| 3.5645e-03 | 1.9990 | 3.5645e-03 | 1.9990 | ||
Table 3.
Comparison of errors and CPU runtime of CNMFE and RDCNMFE solutions.
| CNMFE Method | RDCNMFE Method | |||||
|---|---|---|---|---|---|---|
| Real time | CPU runtime | CPU runtime | ||||
| 1.9848e-04 | 9.1218e-03 | 257.785s | 1.9848e-04 | 9.1218e-03 | 61.542s | |
| 7.2804e-05 | 8.7617e-03 | 518.493s | 7.2804e-05 | 8.7617e-03 | 71.464s | |
| 2.6836e-05 | 7.7620e-03 | 776.562s | 2.6836e-05 | 7.7620e-03 | 88.742s | |
Table 4.
errors and convergence orders between the genuine, CNMFE and RDCNMFE solutions of u.
| CNMFE Method | RDCNMFE Method | ||||
|---|---|---|---|---|---|
| Grid | order | order | |||
| 4.5306e-02 | 4.5306e-02 | ||||
| 1.2336e-02 | 1.8768 | 1.2336e-02 | 1.8768 | ||
| 3.1509e-03 | 1.9691 | 3.1509e-03 | 1.9691 | ||
| 7.9192e-04 | 1.9923 | 7.9192e-04 | 1.9923 | ||
| 4.5542e-02 | 4.5542e-02 | ||||
| 1.2420e-02 | 1.8746 | 1.2420e-02 | 1.8746 | ||
| 3.1736e-03 | 1.9684 | 3.1736e-03 | 1.9684 | ||
| 7.9778e-04 | 1.9921 | 7.9778e-04 | 1.9921 | ||
| 8.0912e-02 | 8.0912e-02 | ||||
| 2.3697e-02 | 1.7717 | 2.3697e-02 | 1.7717 | ||
| 6.1544e-03 | 1.9450 | 6.1544e-03 | 1.9450 | ||
| 1.5541e-03 | 1.9856 | 1.5541e-03 | 1.9856 | ||
Table 5.
errors and convergence orders between the genuine, CNMFE and RDCNMFE solutions of q.
| CNMFE Method | RDCNMFE Method | ||||
|---|---|---|---|---|---|
| Grid | order | order | |||
| 8.1734e+00 | 8.1734e+00 | ||||
| 2.2583e+00 | 1.8557 | 2.2583e+00 | 1.8557 | ||
| 5.7873e-01 | 1.9643 | 5.7873e-01 | 1.9643 | ||
| 1.4557e-01 | 1.9911 | 1.4557e-01 | 1.9911 | ||
| 8.2168e+00 | 8.2168e+00 | ||||
| 2.2721e+00 | 1.8546 | 2.2721e+00 | 1.8546 | ||
| 5.8240e-01 | 1.9639 | 5.8240e-01 | 1.9639 | ||
| 1.4651e-01 | 1.9910 | 1.4651e-01 | 1.9910 | ||
| 1.4643e+01 | 1.4643e+01 | ||||
| 4.1238e+00 | 1.8281 | 4.1238e+00 | 1.8281 | ||
| 1.0595e+00 | 1.9605 | 1.0595e+00 | 1.9605 | ||
| 2.6680e-01 | 1.9896 | 2.6680e-01 | 1.9896 | ||
Table 6.
Comparison of errors and CPU runtime of CNMFE and RDCNMFE solutions.
| CNMFE Method | RDCNMFE Method | |||||
|---|---|---|---|---|---|---|
| Real time | CPU runtime | CPU runtime | ||||
| 1.3087e-03 | 1.4793e-01 | 128.368s | 1.3087e-03 | 1.4793e-01 | 56.044s | |
| 7.9192e-04 | 1.4557e-01 | 254.327s | 7.9192e-04 | 1.4557e-01 | 60.044s | |
| 4.8003e-04 | 1.4453e-01 | 390.405s | 4.8003e-04 | 1.4453e-01 | 69.740s | |
| 2.9118e-04 | 1.4011e-01 | 522.115s | 2.9118e-04 | 1.4011e-01 | 76.308s | |
| 1.7665e-04 | 1.3271e-01 | 650.523s | 1.7665e-04 | 1.3271e-01 | 83.345s | |
| 1.0718e-04 | 1.2395e-01 | 781.210s | 1.0718e-04 | 1.2395e-01 | 92.238s | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



