
Submitted:
13 January 2025
Posted:
14 January 2025
You are already at the latest version
Abstract
This study emphasizes the importance of accurately determining the mobility systems for unmanned ground vehicles (UGVs) to ensure optimal performance. The mobility system is crucial for reliable operation across various terrains and significantly affects energy efficiency, maneuverability, and load-carrying capacity. Choosing an unsuitable mobility system can hinder mission success and lead to costly design modifications. Therefore, selecting a system that meets mission requirements and user needs is vital for operational effectiveness. The research explores the complex interactions among UGV parameters and the challenges of designing a versatile mobility system. Unlike conventional design processes that prioritize mobility system selection early on, this study employs a novel machine learning approach. By analyzing feedback from five key questions, the most appropriate mobility system option was quickly identified. The performance of several classification algorithms was assessed, including Random Forest (98.7%), Naive Bayes (81.3%), Support Vector Machines (94.4%), and k-Nearest Neighbors (98%). Evaluation metrics such as precision, recall, and F1 scores revealed that the Random Forest model yielded the highest accuracy, achieving a success rate of 98.7%.
Keywords:
Unmanned Ground Vehicles (UGVs)
; Machine Learning
; Random Forest
; Mobility
1. Introduction
Research conducted on unmanned ground vehicles (UGVs) indicates that studies in this field predominantly focus on key topics such as autonomous navigation, obstacle detection, path planning, sensor integration, agricultural applications, and usage in various industrial sectors. In this study, the motion systems of UGVs were determined using machine learning techniques. Classification algorithms such as Random Forest, Naive Bayes, Support Vector Machines, and k-Nearest Neighbors were compared in terms of performance, and the algorithm achieving the highest accuracy was integrated into the system. This approach addresses a significant gap in the field by enabling a more efficient identification of motion systems for UGVs. Furthermore, the incorporation of machine learning methods into the selection process enhances the originality of the study. In recent years, significant academic studies on UGVs can be summarized as follows:
Gadekar et al. (2023) designed the modular unmanned ground vehicle "Rakshak," which provides 360° coverage and flexible adaptability for surveillance and small-load transportation operations in hazardous environments, aiming to minimize human errors. Similarly, Shen et al. (2023) proposed the AeroNet network, developed to suit the limited computational capacity of micro unmanned aerial vehicles, enabling high-accuracy relative positioning and object detection for unmanned air-ground vehicles in complex environments. Xu et al. (2023) developed a hierarchical controller for six-wheel independently driven unmanned ground vehicles, which enhances stability during steering while reducing tire wear and energy consumption. Wang et al. (2021) proposed a disturbance observer-based strategy for the longitudinal and lateral control of unmanned ground vehicles, offering an approach that estimates total disturbances and improves system robustness. Luo (2023) introduced the Multi-Sensor Collaborative Decision Network (MSCDN), designed to enable faster and more accurate decision-making for unmanned ground vehicles in dynamic environments, enhancing the scalability and adaptability of multi-sensor fusion. Hu and Assaad (2023) systematically summarized the applications, sensors, and data processing methods of unmanned aerial and ground vehicles in the civil infrastructure sector, highlighting challenges and research opportunities in this field.
Beycimen et al. (2023) assessed the terrain traversal capabilities of unmanned ground vehicles using an approach that incorporates terrain classification and traversal analysis through machine learning and sensor technologies. Chen et al. (2024) developed a hierarchical coordinated controller and an optimized particle swarm algorithm-based torque distribution system to enhance stability during turning and reduce wheel slippage in unmanned ground vehicles with variable wheelbases. An et al. (2023) designed a system integrating unmanned aerial and ground vehicles to optimize biochar applications, aimed at reducing agricultural carbon emissions, while achieving high accuracy in precision landing and altitude calculation. Alinezhad et al. (2024) evaluated the potential of unmanned ground vehicles to enhance spatial efficiency in indoor environmental quality (IEQ) monitoring, highlighting the effectiveness of UGV-based mobile sensors through 3D environmental models and sensor improvements sensitive to human behavior. Hinostroza et al. (2023) developed a planning system for automating maintenance and inspection operations using UGVs on offshore oil and gas platforms, offering advantages in safety, efficiency, and cost by adapting to unexpected scenarios. Lu et al. (2023) proposed dynamic modeling and control strategies for distributed-drive UGVs, considering variable structural parameters and terrain uncertainties, based on a vehicle-tire-terrain interaction model. Jiang et al. (2022) introduced a model-free predictive control strategy for UGVs with variable configurations, optimized with particle swarm optimization, to improve path-following performance and mobility. Qi et al. (2021) developed an omnidirectional unmanned ground vehicle equipped with obstacle detection, challenging traversal terrain, and hazardous material collection capabilities, designed for search and rescue missions in underground areas of smart cities. Krecht et al. (2023) proposed a comprehensive methodology to enhance the reliability of UGVs by analyzing their durability through process graphs, aiming to prevent mission failures and improve reliability in critical operations. Yang et al. (2021) introduced a driving assistance system that improves environmental perception and object detection performance for autonomous UGVs using innovative algorithms based on multi-sensor data fusion. Ibrahim et al. (2023) developed an efficient reinforcement learning-based model to optimize data collection time and distance for camera-equipped UGVs operating in indoor environments.
2. Materials and Methods
Random forest is an effective method that combines multiple decision trees, utilizing an ensemble approach to produce more robust and reliable results. Naive Bayes leverages probability theory to deliver fast and efficient outcomes, while Support Vector Machines (SVM) focus on identifying the optimal discriminative vector between classes. The k-Nearest Neighbors (k-NN) algorithm classifies new data based on its nearest neighbors. All these algorithms were assessed using performance metrics such as accuracy, precision, and recall, showcasing different strengths depending on the datasets used.
A suitable database was created for unmanned ground vehicles, and classification algorithms such as Random Forest, Naive Bayes, Support Vector Machines (SVM), and k-Nearest Neighbors (k-NN) were utilized. The performance of these algorithms was evaluated by calculating their metrics at the end of the training process.
Machine learning classification algorithms were implemented on Anaconda's Jupyter Notebook platform, and their performance was thoroughly evaluated using confusion matrices. The prediction results of the models were compared with the actual class labels, and a comparative analysis was conducted based on key metrics such as accuracy, precision, recall, and F1 score.
2.1. Mobility Systems of Unmanned Ground Vehicles
Unmanned ground vehicles are designed with various mobility systems to operate effectively in challenging terrains and variable environmental conditions. These configurations determine the vehicle's maneuverability, stability, speed, and load capacity, allowing customization for specific mission requirements. The mobility systems of UGVs include 2, 4, 6, and 8-wheeled designs, as well as tracked systems. Two-wheeled systems are lightweight, compact, and offer high maneuverability, while 4, 6, and 8-wheeled systems provide higher load capacity and better terrain adaptation. Tracked systems, on the other hand, deliver superior traction and stability on rough and uneven terrains by maximizing ground contact.
The two-wheeled mobility configuration is ideal for compact and highly maneuverable vehicles, making it a preferred choice for missions requiring lightweight and rapid movement. Equipped with dynamic balancing mechanisms, these vehicles offer effective mobility in confined spaces, quick turns, and the ability to maneuver around obstacles. Commonly used in reconnaissance, surveillance, and speed-critical operations, two-wheeled UGVs perform efficiently in indoor environments and on smooth surfaces. With advanced balancing algorithms and sensor technologies, they ensure stability and operational efficiency while enhancing energy efficiency through the use of lightweight materials. Additionally, by minimizing material usage and production waste, they contribute to environmental sustainability (Demir and Bozdemir, 2017).
The four-wheeled mobility configuration is the most used design in unmanned ground vehicles (UGVs) due to its advantages in overall stability, load-carrying capacity, and terrain adaptability. With four wheels, it provides high stability and balanced driving, enabling effective maneuverability and substantial load-carrying capability in challenging terrain conditions. Widely employed in both military and civilian applications, this configuration is particularly favored for tasks requiring robust off-road performance. Modern four-wheeled UGVs are equipped with advanced suspension systems, powerful motors, and state-of-the-art navigation technologies, optimizing energy efficiency and operational effectiveness. Additionally, the choice of materials and production techniques can be designed with environmental sustainability in mind (Demir, 2017).
The six-wheeled mobility configuration is a preferred design for challenging terrain conditions and heavy load requirements, offering high carrying capacity and superior off-road capabilities. Equipped with three pairs of wheels, this configuration enables the transport of larger and heavier loads while providing enhanced stability and traction in rough terrains. Commonly used in military operations and heavy industrial applications, six-wheeled UGVs are effective in missions such as reconnaissance, logistics support, and material transport. Modern systems incorporate advanced suspension, high-capacity motors, and sophisticated control systems to enhance performance. To minimize energy consumption and environmental impact, material selection and production processes should be carefully optimized (Demir and Bozdemir, 2019).
The eight-wheeled mobility configuration is ideal for missions requiring high load capacity and exceptional off-road capabilities. With four pairs of wheels, it provides superior stability, balanced driving, and excellent maneuverability in challenging terrain conditions. Well-suited for transporting large loads, this configuration delivers reliable performance, especially in military operations and terrain exploration tasks. Modern eight-wheeled UGVs are equipped with advanced suspension systems, powerful motors, and sophisticated control systems to enhance performance while offering operators greater control and flexibility. To minimize environmental impact, these systems require optimization in terms of material usage and energy consumption, ensuring sustainable design practices (Demir, 2017).
The tracked mobility configuration provides superior maneuverability and stability in challenging terrain conditions. With a broad contact surface, it delivers high performance on soft or slippery surfaces such as mud, sand, and snow, reducing ground pressure while enhancing traction and stability. This configuration is particularly favored in military UGVs for its reliability and resistance to explosive devices, and it is also utilized in civilian applications such as archaeological exploration and environmental monitoring. Modern tracked UGVs are designed with advanced materials and suspension systems, enabling effective operation at higher speeds and over longer distances. Challenges such as high fuel consumption and carbon footprint can be mitigated through innovative design and material optimization (Demir and Bozdemir, 2017).
The two-wheeled configuration is suitable for narrow and flat surfaces, offering energy efficiency due to its low rolling resistance and weight advantage. However, it struggles on uneven terrain and requires additional support for balance. The four-wheeled configuration performs better on uneven surfaces, enhancing stability and safety at the cost of higher energy consumption, though it is not ideal for extremely rough terrain. The six-wheeled system provides improved mobility on challenging terrains and high stability through multiple contact points, but it also comes with increased energy consumption. The eight-wheeled configuration excels in the most demanding terrains, offering superior load distribution, enhanced maneuverability, minimal risk of tipping, and maximum stability, though it requires significant energy input. Finally, the tracked configuration delivers excellent traction and stability on rough terrain thanks to its broad contact area and low center of gravity, but it demands substantial energy consumption (Table 1).
Accurately determining the mobility system of unmanned ground vehicles (UGVs) is crucial for their performance and functionality. The mobility system ensures that the vehicle operates effectively and reliably under various terrain conditions, while also directly influencing factors such as energy efficiency, maneuverability, and load-carrying capacity. An incorrect choice of mobility system can result in the vehicle failing to fulfill its intended function or necessitating costly design revisions. Therefore, selecting a mobility system that aligns with user needs and mission requirements plays a vital role in enhancing operational success and ensuring efficient resource utilization.
To determine the mobility systems for UGVs, five key questions were posed to the customer or designer. The responses to these questions were analyzed using artificial intelligence with the aid of a specially prepared dataset, leading to the identification of the most suitable mobility system (Trombetta, 2021).
- Cost of the UGV: Low, Medium, or High.
- Dimensional Classification of the UGV: Light, Small, Medium, or Heavy.
- Mission of the UGV: Reconnaissance, Surveillance and Intelligence, Bomb Disposal, Attack and Rear Security, Logistics, or Mine and Obstacle Clearing.
- Terrain Type for Operation: Flat hard surface, Flat soft surface, Rugged hard terrain, or Rugged soft terrain.
- Maneuverability of the UGV: Wide turning radius, Medium turning radius, or Narrow turning radius.
2.2. Machine Learning Classification Algorithms
Supervised learning is a method in machine learning that trains algorithms based on past input-output relationships, aiming to make predictions about future events. It is a widely used technique in machine learning that works with labeled datasets. This method leverages historical data and experiences to perform prediction tasks such as classification and regression (Kurnaz, 2019).
Random Forest is a powerful method used in various machine learning problems, such as classification and regression. This technique creates a more robust and stable model by combining multiple decision trees (Vanrullen et al., 2011). As part of the "ensemble learning" strategy, Random Forest is employed to classify data into specific categories for classification tasks or predict continuous variables in regression tasks. Unlike clustering techniques, Random Forest works with labeled datasets and predefined target variables to enhance its predictive capability (Witten et al., 2005).
The Naive Bayes algorithm is a fundamental classification method based on probability theory. Its name stems from the application of Bayes' theorem and the assumption of independence between features. This method calculates the probability of each feature using Bayes' theorem, assuming that all features in the dataset are independent of each other. The product of these probabilities determines the conditional probabilities of the classes. For a new data point, the algorithm compares these calculated probabilities and selects the class with the highest probability (Vanrullen et al., 2011).
Support Vector Machines (SVM) are an effective classification method based on statistical learning theory (Kavzoğlu and Çölkesen, 2010). SVM is a versatile algorithm that can be used for both classification and regression tasks (Yakut et al., 2014). It has applications in various fields, including facial recognition, text and image classification, bioinformatics, handwriting recognition, and predictive control (Metlek and Kayaalp, 2020). SVM is particularly effective for linearly separable classes, as it aims to classify data points optimally by determining an optimal decision boundary that separates the two classes.
The k-Nearest Neighbors (K-NN) algorithm is a simple, yet effective method frequently used for classification tasks in machine learning. When classifying a data point, the algorithm identifies the k nearest neighbors of that point and uses their class labels for classification. The value of k, representing the number of neighbors considered, is determined by the user. K-NN assigns the new data point to the class to which most of its nearest neighbors belong, based on calculated distances between data points (Vanrullen et al., 2011). Primarily used for classification, K-NN can also be applied to clustering problems by grouping data points with similar features, though it is less commonly used for clustering compared to other techniques (Witten et al., 2005).
3. Results
Accuracy is defined as the ratio of the number of correctly predicted examples, for both classes, to the total number of examples (Demir, 2024). Precision refers to the proportion of instances correctly assigned to a given class (Class 1) relative to all instances predicted to belong to that class. Also known as consistency, it indicates how similar the classification results are to each other (Šimundić, 2009). Recall (or sensitivity) is calculated as the ratio of correctly predicted instances of Class 1 to all actual instances of Class 1 (Demir, 2024). When precision and recall alone are insufficient, the F-measure is used to provide a more comprehensive performance analysis by considering both metrics together. The F-measure is calculated as the harmonic mean of precision and recall (Demir & Bozdemir, 2024). The mathematical expressions for these performance metrics are presented in Table 2.
3.1. Random Forest
The Random Forest classification algorithm is an ensemble method that combines multiple decision trees, where classification is based on the majority vote of the predictions from all trees. This approach reduces overfitting and enhances the model's generalization ability. The classification performance of the model is illustrated using a confusion matrix (Figure 1). While the model successfully classified the 8-wheeled UGVs correctly, several misclassifications were observed in other classes. Specifically, six 2-wheeled UGVs were misclassified as 4-wheeled. Similarly, five 4-wheeled UGVs were incorrectly classified as 2-wheeled, and two were misclassified as 6-wheeled. For the 6-wheeled class, two UGVs were classified as 2-wheeled and nine as 4-wheeled. Additionally, among the tracked UGVs, two were misclassified as 2-wheeled and another two as 4-wheeled.
Based on the confusion matrix, the Random Forest classification algorithm demonstrates a high level of performance with an overall accuracy of 98.7% across all classes. This indicates that the model generally makes accurate predictions (Equation 1).
By analyzing the confusion matrix, the necessary calculations were performed to determine precision, recall, and F1 score values. These metrics are summarized in Table 3.
3.2. Naive Bayes
The Naive Bayes classification algorithm is a simple yet powerful method that performs classification based on Bayes' theorem while assuming that all features are independent of one another. This algorithm calculates class probabilities and identifies the most probable class by maximizing these probabilities. The classification performance of the model is visualized using a confusion matrix (Figure 2). The model correctly classified the 2-wheeled and 8-wheeled UGV classes. However, several misclassifications were observed in other classes. Specifically, 33 and 104 4-wheeled UGVs were misclassified as 2-wheeled and 6-wheeled, respectively. Additionally, 96 and 113 6-wheeled UGVs were incorrectly classified as 4-wheeled and tracked. Lastly, 11 and 34 tracked UGVs were misclassified as 2-wheeled and 4-wheeled, respectively. Based on the confusion matrix, the Naive Bayes classification algorithm achieves an overall accuracy of 81.3% across all classes. This accuracy is somewhat lower compared to other algorithms (Equation 2).
By analyzing the confusion matrix, the necessary calculations were performed to determine the precision, recall, and F1 score values. These metrics are presented in Table 4.
3.3. Support Vector Machines (SVM)
Support Vector Machines (SVM) are a powerful classification algorithm that aims to find the optimal hyperplane (decision boundary) that best separates the data. By maximizing the margin between classes, SVM can perform effective classification even on high-dimensional datasets. The classification performance of the model is visualized using a confusion matrix (Figure 3). The model correctly classified the 2-wheeled UGV class, but several misclassifications occurred in other classes. Specifically, 2 4-wheeled UGVs were misclassified as 2-wheeled, 79 6-wheeled UGVs were misclassified as 4-wheeled, and 27 8-wheeled UGVs were misclassified as 6-wheeled. Additionally, 5 and 6 tracked UGVs were misclassified as 2-wheeled and 4-wheeled, respectively. Based on the confusion matrix, the performance of the Support Vector Machines (SVM) classification algorithm was determined to have an overall accuracy of 94.4% across all classes (Equation 3).
By analyzing the confusion matrix, the necessary calculations were performed to determine the precision, recall, and F1 score values. These metrics are summarized in Table 5.
3.4. K-Nearest Neighbors (K-NN)
The k-Nearest Neighbors (K-NN) classification algorithm determines the class of a data point based on the classes of its nearest neighbors. This method classifies a new data point by assigning it to the majority class of its k-nearest neighbors in the training dataset.
The classification performance of the model is visualized using a confusion matrix (Figure 4). While the model correctly classified the 2-wheeled UGV class, several misclassifications were observed. Specifically, three, two, and two 4-wheeled UGVs were misclassified as 2-wheeled, 6-wheeled, and tracked, respectively. Similarly, nine, one, and one 6-wheeled UGVs were misclassified as 4-wheeled, 8-wheeled, and tracked. Additionally, two and one 8-wheeled UGVs were misclassified as 2-wheeled and 6-wheeled, respectively. Lastly, sixteen and five tracked UGVs were incorrectly classified as 2-wheeled and 4-wheeled.
Based on the confusion matrix, the K-NN classification algorithm demonstrates high performance with an overall accuracy of 98% across all classes (Equation 4).
The confusion matrix was analyzed to carry out the necessary calculations for determining the values of precision, recall, and F1 score. These metrics are detailed in Table 6.
3.5. Comparison of Performance Metrics for Machine Learning Algorithms
Machine learning is a technology that reduces reliance on human intervention in data-driven decision-making processes, enabling systems to learn, adapt, and make predictions. In large and complex datasets where traditional methods fall short, machine learning algorithms extract meaningful insights quickly and effectively. This enhances operational efficiency across various sectors such as healthcare, finance, manufacturing, transportation, and energy, while creating new opportunities and fostering innovation. Additionally, it minimizes human error, providing more reliable and scalable solutions. As a cornerstone of modern technology, machine learning plays a critical role in the advancement of artificial intelligence and automation systems.
The performance metrics presented in Table 7 allow for a detailed comparison of the success of different machine learning classification algorithms. While accuracy reflects the overall classification performance, precision indicates the correctness of the model's positive predictions, and recall measures how well the model captures the positive classes. The F1 score provides a balanced evaluation of precision and recall. According to the analysis of these metrics, the Random Forest model outperformed other algorithms, particularly excelling in correct classification rates and its effectiveness with positive classes. These results highlight that the Random Forest model can be a preferred classifier for complex datasets due to its high performance.
4. Discussion
The design of unmanned ground vehicles (UGVs) is a multifaceted process that encompasses various subsystems and their intricate interrelations. This design process commences with the identification of appropriate mobility systems. By taking into account customer requirements and the interactions among system components, the most suitable mobility system can be identified. This methodology not only reduces design time but also enhances quality and minimizes costs. However, ineffective management of this process can result in irreversible consequences or substantial financial impacts. This study emphasizes the interdependence of all parameters associated with UGVs and the challenges related to developing a mobility system capable of operating across diverse terrain conditions. While traditional design methodologies often prioritize mobility system selection, this research introduces an innovative approach leveraging machine learning techniques. Through the analysis of feedback gathered from five key questions, the most appropriate mobility system alternative was efficiently identified.
The study evaluated the performance of several classification algorithms, including Random Forest (98.7%), Naive Bayes (81.3%), Support Vector Machines (94.4%), and k-Nearest Neighbors (98%). In comparing metrics of precision, recall, and F1 score, the Random Forest model exhibited the highest accuracy rate of 98.7%. The analysis of these algorithms represents a crucial advancement in identifying the most effective methodology for selecting mobility systems for UGVs. By examining each algorithm's performance in relation to the dataset, a deeper understanding of the complex parameters influencing the mobility system selection process has been attained. Notably, the superior efficacy of the Random Forest model underscores its capability in managing complex data structures. Furthermore, the strengths and limitations of the other algorithms were thoroughly elucidated during this evaluation, providing valuable insights for future research.
This innovative approach not only optimizes the selection of mobility systems but also aids in developing a comprehensive roadmap for the overall design process. The application of machine learning techniques enables an enhanced understanding and management of the relationships among the intricate design parameters, thus promising increased efficiency in future UGV projects. Additionally, the findings of this study illustrate the applicability of similar methodologies to the design of other unmanned systems, offering a versatile framework adaptable to various operational scenarios.
5. Conclusions
This study highlights the critical significance of accurately determining mobility systems for unmanned ground vehicles (UGVs) in enhancing their overall performance and functionality. By leveraging a machine learning-based approach to selecting the most suitable mobility system, we demonstrated a significant improvement in efficiency, quality, and cost-effectiveness compared to traditional design methodologies. The analysis of various classification algorithms revealed that the Random Forest model achieved the highest accuracy, underscoring its effectiveness in addressing the complexities inherent in mobility system selection. Furthermore, this research elucidates the intricate interrelationships among different design parameters, emphasizing the necessity of a comprehensive understanding of these interactions to develop effective mobility solutions for diverse terrain conditions. The insights garnered from the comparison of algorithms not only enhance our understanding of the selection process but also identify the strengths and limitations inherent within each method, thereby informing future research directions. Overall, the findings advocate for the integration of machine learning techniques into the design processes of UGVs, which can significantly improve decision-making and operational outcomes. Moreover, the framework established in this study holds promise for extending similar methodologies to the design of other unmanned systems, thus contributing to broader advancements in autonomous technology. Future work should explore the practical implementation of these findings in real-world scenarios, further validating the effectiveness of this innovative approach.
References
- Alinezhad, E., Gan, V. V., Chang W. and Zhou J. (2024). Unmanned Ground Vehicles (UGVs)-based mobile sensing for Indoor Environmental Quality (IEQ) monitoring: Current challenges and future directions. Journal of Building Engineering, vol. 88. [CrossRef]
- An, D., Krzysiak, R., Hollenbeck D. and Chen, Y. (2023). Long Endurance Site-Specific Management of Biochar Applications Using Unmanned Aircraft Vehicle and Unmanned Ground Vehicle. IFAC-PapersOnLine, vol. 56, no. 2, pp. 8908-8913. [CrossRef]
- Beycimen, S., Ignatyev D. and Zolotas, A. (2023). A comprehensive survey of unmanned ground vehicle terrain traversability for unstructured environments and sensor technology insights. Engineering Science and Technology, an International Journal, 47. [CrossRef]
- Chen, G., Gao, X., Zhao, Y., Xu X. and Jiang Y. (2024) “Attitude stability control for 6WID unmanned ground vehicle during steering: A collaborative controller considering minimizing tire slip energy loss”. Energy, vol. 302. [CrossRef]
- Demir, C. (2017). İnsansız kara araçlarının hareket sistemlerinin kavramsal tasarımı, Yüksek Lisans Tezi, Kırıkkale Üniversitesi Fen Bilimleri Enstitüsü, Kırıkkale.
- Demir, C. (2024). Savunma sistemlerine yönelik yapay zeka tekniklerine dayalı inovatif bir tasarım işlem modeli geliştirilmesi, Doktora Tezi, Gazi Üniversitesi Fen Bilimleri Enstitüsü, Ankara.
- Demir, C. and Bozdemir, M. (2017). İnsansız araçlarda teknolojik gelişmelerin incelenmesi, Uluslararası Taşköprü Pompeiopolis Bilim Kültür Sanat Araştırmaları Sempozyumu, 10-12 Nisan, Kastamonu, 633-647.
- Demir, C. and Bozdemir, M. (2019). İnsansız kara aracı tasarımında ağırlık oranı metodu kullanımı. Gazi Mühendislik Bilimleri Dergisi, 5(1), 32-45.
- Gadekar, A., Fulsundar, S., Deshmukh, P., Aher, J., Kataria, K., Patel, V. and Barve, S. (2023). Rakshak: A modular unmanned ground vehicle for surveillance and logistics operations. Cognitive Robotics, vol. 3, pp. 23-33. [CrossRef]
- Hinostroza, M. A., Lekkas, A. M., Transeth, A. A., Luteberget, B., de Jonge C. and Sagatun, S. I. (2023). Automated planning for inspection and maintenance operations using unmanned ground vehicles. IFAC-PapersOnLine, vol. 56, no.2, pp. 7873-7879. [CrossRef]
- Hu, X. and Assaad, R. H. (2023). The use of unmanned ground vehicles (mobile robots) and unmanned aerial vehicles (drones) in the civil infrastructure asset management sector: Applications, robotic platforms, sensors, and algorithms. Expert Systems with Applications, vol. 232. [CrossRef]
- Ibrahim, A., Torres-Calderon W. and Golparvar-Fard, M. (2023). Reinforcement learning for high-quality reality mapping of indoor construction using unmanned ground vehicles. Automation in Construction, vol. 156. [CrossRef]
- Jiang, Y., Xu, X., Zhang L. and Zou, T. (2022) Model free predictive path tracking control of variable-configuration unmanned ground vehicle”, ISA transactions, vol. 129, part A, pp. 485-494. [CrossRef]
- Kavzoğlu, T. and Çölkesen, İ. (2010). Destek vektör makineleri ile uydu görüntülerinin sınıflandırılmasında kernel fonksiyonlarının etkilerinin incelenmesi. Harita Dergisi, 144(7), 73-82.
- Krecht, R., Suta, A., Tóth Á. and Ballagi, Á. (2023). Towards the resilience quantification of (military) unmanned ground vehicles. Cleaner Engineering and Technology, vol. 14. [CrossRef]
- Kurnaz, G. (2019). Kablo takımı üretim süresinin ve kusurlu ürün oluşumuna yönelik risk faktörlerinin makine öğrenmesi algoritmaları ile belirlenmesi, Yüksek Lisans Tezi, Ondokuz Mayıs Üniversitesi Fen Bilimleri Enstitüsü, Samsun.
- Lu, S., Xu, X. and Wang, W. (2023). Coupling dynamic model of vehicle-wheel-ground for all-terrain distributed driving unmanned ground vehicle. Simulation modelling practice and theory, vol. 128. [CrossRef]
- Luo, M. (2023). Multi-sensor-based strategy learning with deep reinforcement learning for unmanned ground vehicle. International Journal of Intelligent Networks, vol. 4, pp. 325-336. [CrossRef]
- Metlek, S. and Kayaalp, K. (2020). Makine öğrenmesinde, teoriden örnek MATLAB uygulamalarına kadar destek vektör makineleri. Adıyaman: İksad Yayınevi.
- Qi, L., Zhang, T., Xu, K., Pan, H., Zhang Z. and Yuan, Y. (2021). A novel terrain adaptive omni-directional unmanned ground vehicle for underground space emergency: Design, modeling and tests. Sustainable Cities and Society, vol. 65. [CrossRef]
- Shen, K., Zhuang, Y., Chen, Y., Zuo S. and Liu, T. (2024). AeroNet: An efficient relative localization and object detection network for cooperative aerial-ground unmanned vehicles. Pattern Recognition Letters, vol. 171, pp. 28-37. [CrossRef]
- Šimundić, A. M. (2009). Measures of diagnostic accuracy: basic definitions. Ejifcc, 19(4), 203-209.
- Trombetta, E. I. (2021). Identification Methods and Simulation Modeling of a small UGV for Indoor Applications (Doctoral dissertation, Politecnico di Torino).
- Vanrullen, T., Malagôn, C. and Chaari, L. F. (2011). Rise of data mining, International Journal of Computer Science Issues, 7(3), 202-208.
- Vardin, S., Demircioğlu, P. and Böğrekci, İ. (2022). Arazi uygulamaları için insansız yer aracı geliştirilmesi. Uluborlu Mesleki Bilimler Dergisi, 5(1), 1-13.
- Wang, H., Zuo, Z., Wang, Y., Yang H. and Chang S. (2021). Composite nonlinear extended state observer and its application to unmanned ground vehicles. Control Engineering Practice, vol. 109. [CrossRef]
- Witten, I. H., Frank, E., Hall, M. A., Pal, C. J. and Data, M. (2005). Practical machine learning tools and techniques. In Data mining, 2(4), 403-413.
- Xu, X., Chen, G., Gao, X., Jiang Y. and Feng, Y. (2023). Stability and energy-saving coordinated control strategy of six-wheel independent drive unmanned ground vehicle. ISA transactions, vol. 143, pp. 692-706. [CrossRef]
- Yakut, E., Elmas, D. and Yavuz, Y. (2014). Yapay sinir ağları ve destek vektör makineleri yöntemleriyle borsa endeksi tahmini. Süleyman Demirel Üniversitesi İktisadi ve İdari Bilimler Fakültesi Dergisi, 19 (1), 139-157.
- Yang, J., Liu, S., Su, H. and Tian, Y. (2021). Driving assistance system based on data fusion of multisource sensors for autonomous unmanned ground vehicles. Computer Networks, vol. 192. [CrossRef]
Figure 1.
Random forest confusion matrix.
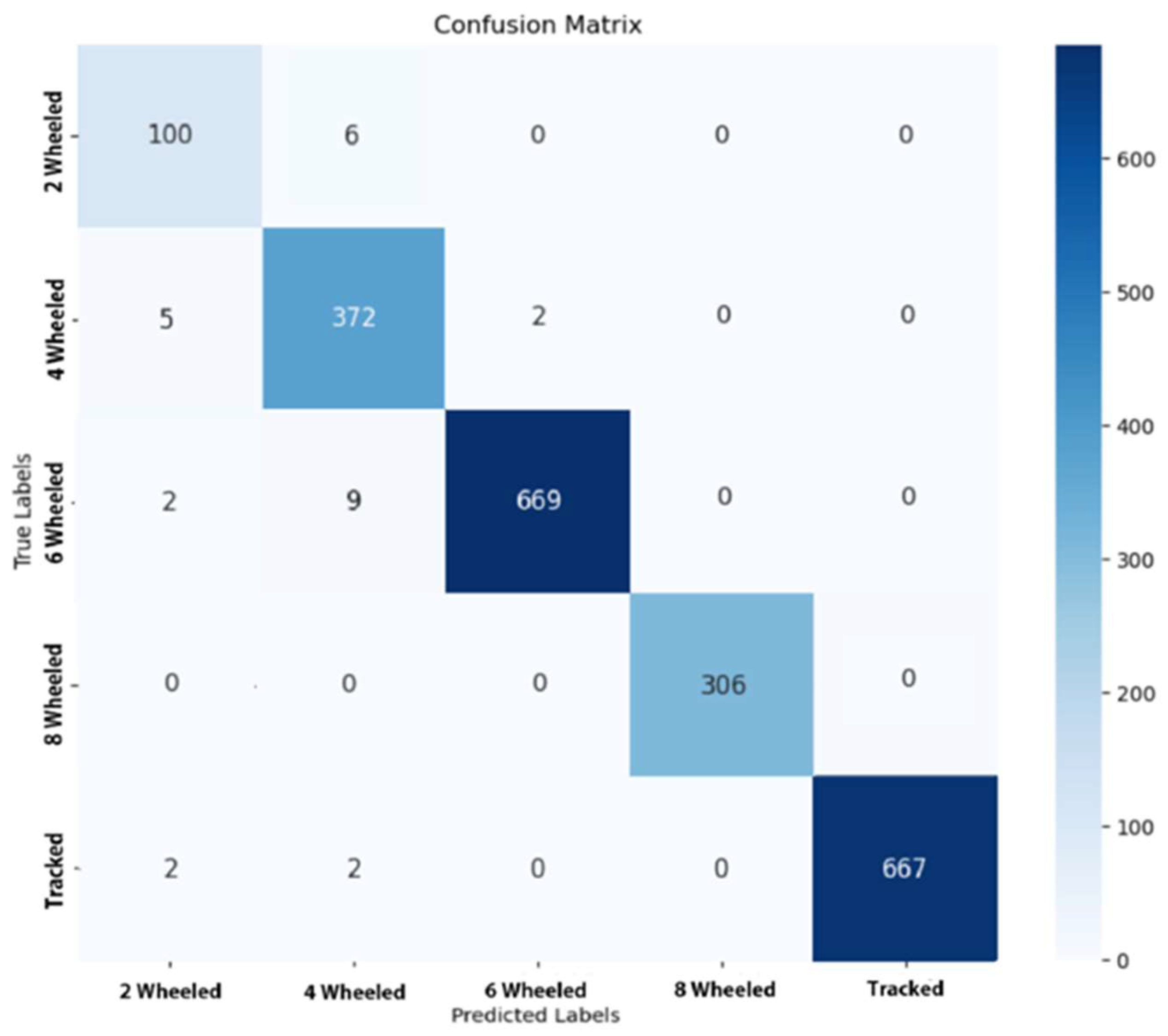
Figure 2.
Naive bayes confusion matrix.
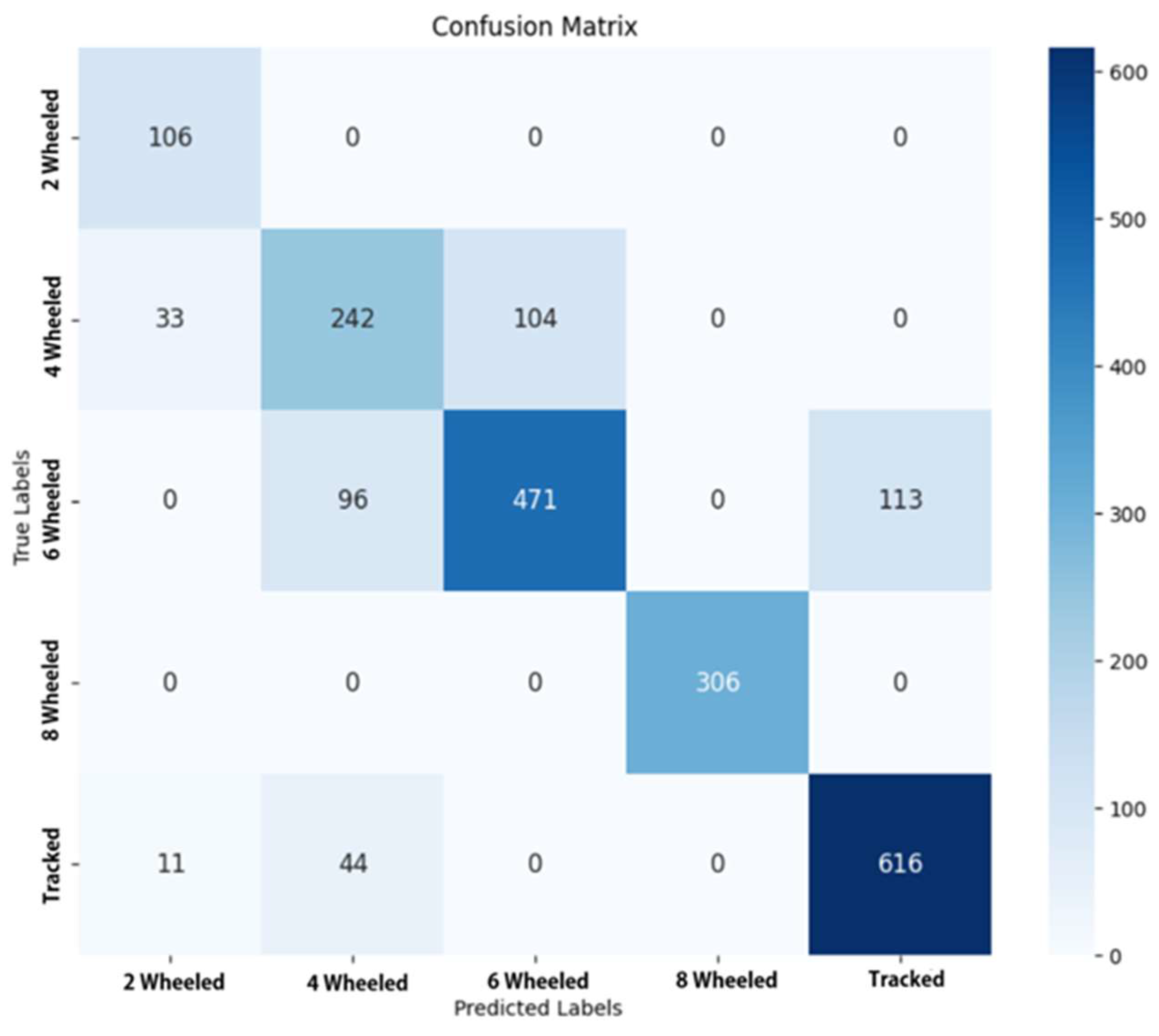
Figure 3.
Support vector machines confusion matrix.
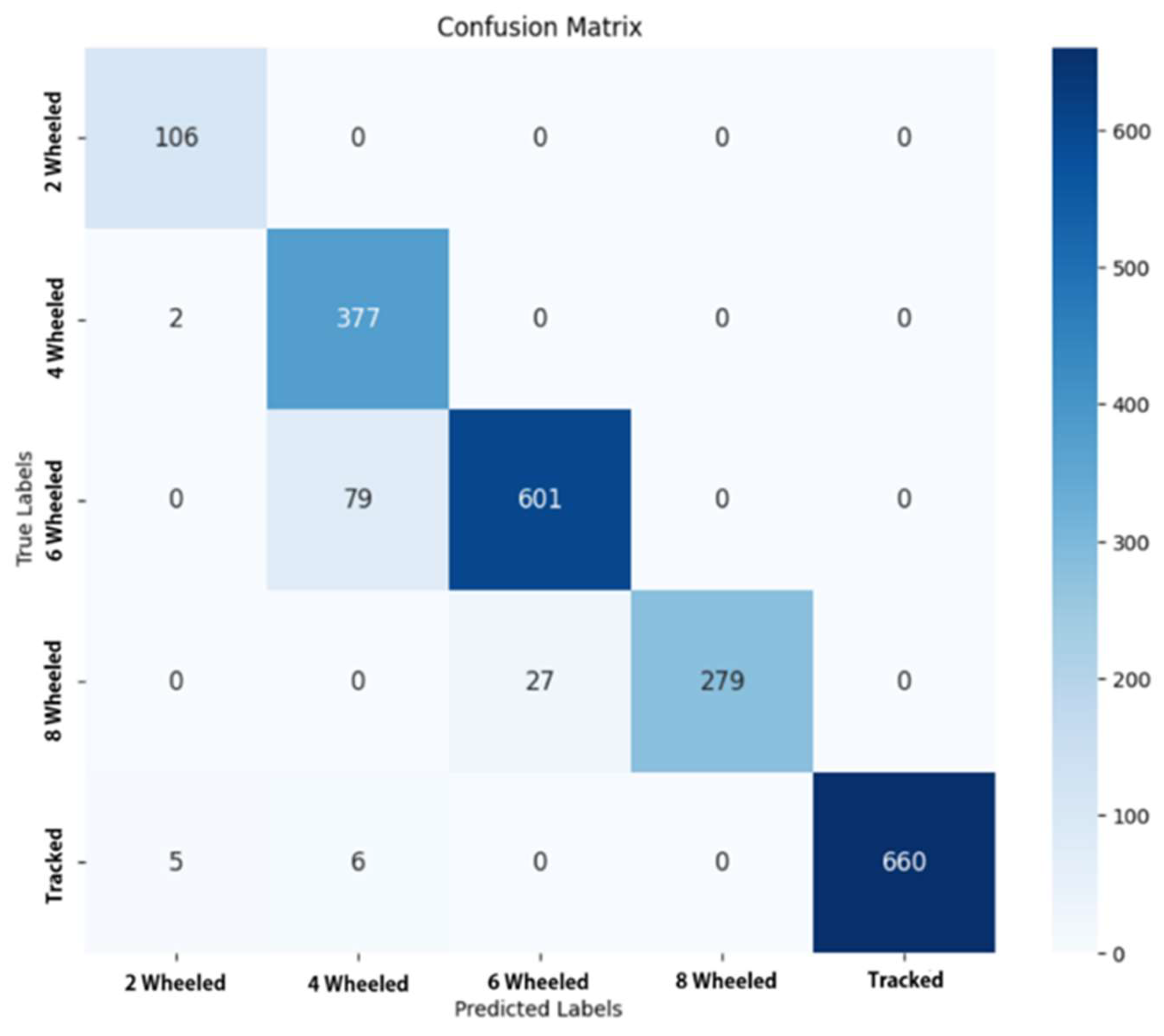
Figure 4.
K-NN confusion matrix.
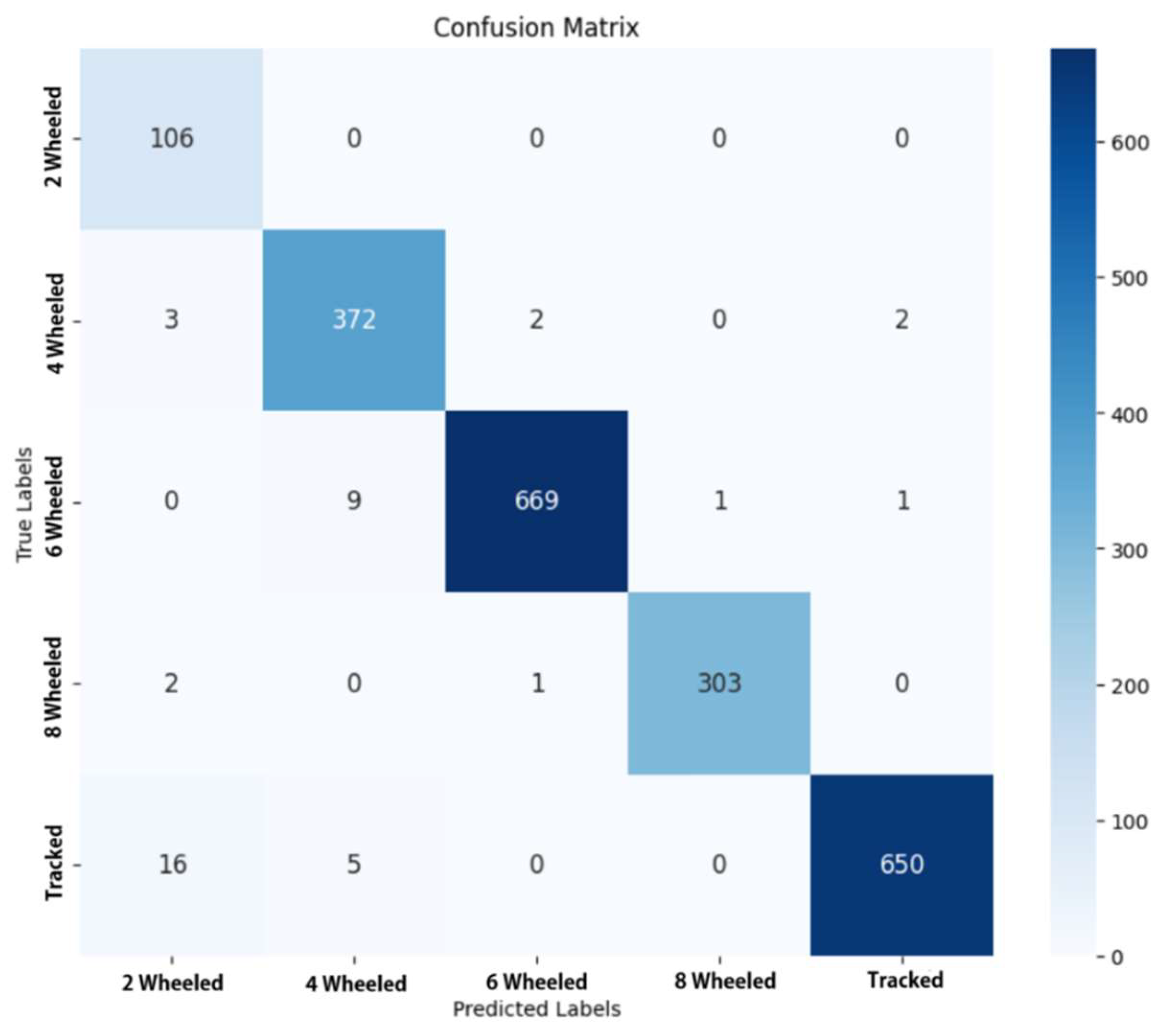

Table 1.
Types of UGV mobility systems and their comparison.
| 2 Wheeled | 4 Wheeled | 6 Wheeled | 8 Wheeled | Tracked | |
|---|---|---|---|---|---|
| Terrain Conditions | Low | Medium | High | Very High | Very High |
| Energy Efficiency | Very High | Medium | Low | Low | Low |
| Stability and Safety | Low | Medium | High | Very High | Very High |
Table 2.
Performance metrics and formulas.
| Metric | Formula |
|---|---|
| Accuracy | |
| Precision | |
| Recall | |
| F1 Score |
Table 3.
Calculations of random forest performance metrics.
| Performance Metrics | Class | Calculation |
|---|---|---|
| Precision | 2 Wheeled | |
| 4 Wheeled | ||
| 6 Wheeled | ||
| 8 Wheeled | ||
| Tracked | ||
| Recall | 2 Wheeled | |
| 4 Wheeled | ||
| 6 Wheeled | ||
| 8 Wheeled | ||
| Tracked | ||
| F1 Score | 2 Wheeled | |
| 4 Wheeled | ||
| 6 Wheeled | ||
| 8 Wheeled | ||
| Tracked |
Table 4.
Calculations of naive bayes performance metrics.
| Performance Metrics | Class | Calculation |
|---|---|---|
| Precision | 2 Wheeled | |
| 4 Wheeled | ||
| 6 Wheeled | ||
| 8 Wheeled | ||
| Tracked | ||
| Recall | 2 Wheeled | |
| 4 Wheeled | ||
| 6 Wheeled | ||
| 8 Wheeled | ||
| Tracked | ||
| F1 Score | 2 Wheeled | |
| 4 Wheeled | ||
| 6 Wheeled | ||
| 8 Wheeled | ||
| Tracked |
Table 5.
Calculations of support vector machines performance metrics.
| Performance Metrics | Class | Calculation |
|---|---|---|
| Precision | 2 Wheeled | |
| 4 Wheeled | ||
| 6 Wheeled | ||
| 8 Wheeled | ||
| Tracked | ||
| Recall | 2 Wheeled | |
| 4 Wheeled | ||
| 6 Wheeled | ||
| 8 Wheeled | ||
| Tracked | ||
| F1 Score | 2 Wheeled | |
| 4 Wheeled | ||
| 6 Wheeled | ||
| 8 Wheeled | ||
| Tracked |
Table 6.
Calculations of K-NN performance metrics.
| Performance Metrics | Class | Calculation |
|---|---|---|
| Precision | 2 Wheeled | |
| 4 Wheeled | ||
| 6 Wheeled | ||
| 8 Wheeled | ||
| Tracked | ||
| Recall | 2 Wheeled | |
| 4 Wheeled | ||
| 6 Wheeled | ||
| 8 Wheeled | ||
| Tracked | ||
| F1 Score | 2 Wheeled | |
| 4 Wheeled | ||
| 6 Wheeled | ||
| 8 Wheeled | ||
| Tracked |
Table 7.
Performance Metrics of Machine Learning Classification Algorithms.
| Algorithm | Accuracy | Class | Precision | Recall | F1 Score |
|---|---|---|---|---|---|
| Random Forest | 0.987 | 2 Wheeled | 0.917 | 0.943 | 0.930 |
| 4 Wheeled | 0.956 | 0.982 | 0.969 | ||
| 6 Wheeled | 0.997 | 0.984 | 0.990 | ||
| 8 Wheeled | 1.000 | 1.000 | 1.000 | ||
| Tracked | 1.000 | 0.994 | 0.997 | ||
| Naive Bayes | 0.813 | 2 Wheeled | 0.707 | 1.000 | 0.828 |
| 4 Wheeled | 0.636 | 0.639 | 0.637 | ||
| 6 Wheeled | 0.819 | 0.816 | 0.817 | ||
| 8 Wheeled | 1.000 | 1.000 | 1.000 | ||
| Tracked | 0.845 | 0.920 | 0.881 | ||
| Support Vector Machines | 0.944 | 2 Wheeled | 0.938 | 1.000 | 0.968 |
| 4 Wheeled | 0.816 | 0.995 | 0.897 | ||
| 6 Wheeled | 0.957 | 0.884 | 0.919 | ||
| 8 Wheeled | 1.000 | 0.912 | 0.954 | ||
| Tracked | 1.000 | 0.984 | 0.992 | ||
| K-NN | 0.980 | 2 Wheeled | 0.835 | 1.000 | 0.910 |
| 4 Wheeled | 0.964 | 0.982 | 0.973 | ||
| 6 Wheeled | 0.996 | 0.984 | 0.990 | ||
| 8 Wheeled | 0.998 | 0.990 | 0.994 | ||
| Tracked | 0.995 | 0.995 | 0.995 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



