
Submitted:
04 January 2025
Posted:
06 January 2025
You are already at the latest version
Abstract
Every Blockchain architecture is built upon two major pillars: a. The hash-based, block-binding mechanism and b. The consensus-achievement mechanism. While the entropic behavior of a. has been extensively studied in the literature over the past decades, the same does not hold for b. In this work, we explore the entropic behavior of the fully distributed Blockchain consensus mechanisms. We quantify the impact of witnessing as a consensus-achievement process under the perspectives of Shannon information entropy and Lyapunov stability. We demonstrate that Blockchain consensus, expressed as the complement of the collective disagreement in a system, is a Lyapunov function of the number of active witnesses W. The more the witnessing in a system, the less the entropy of the system becomes, pushing it to converge to more stable states. We prove that the entropy drop is steepest for low values of W. A new metric for the efficiency of the consensus process based on the Shannon information entropy is introduced, laying the foundations for future studies on Blockchain-based systems optimization.
Keywords:
Blockchain Optimization
; Decentralized Consensus Optimization
; Blockchain Consensus Dynamics
; Shannon Entropy in Distributed Systems
; Lyapunov stability in Blockchain
; Scalable Blockchain Architectures
1. Introduction
Blockchain (BC) technology has transformed the way we think about centralized and decentralized secure systems. Blockchain ensures that once an event is recorded, it becomes a permanent and irreversible part of the systems’ history. This permanence can also be seen from the perspective of information entropy [1]: at the cost of running a Blockchain system, the information stored in it is “frozen to eternity”. The stability of dynamic systems has been analyzed by A.M. Lyapunov [2]. We utilize this analysis to demonstrate that BC systems also operate around a consensus equilibrium. In a malicious attempt to attack and destabilize a BC system, someone will have to confront the immense properties of Secure Hashing: a vast amount of effort which by far exceeds every sensible scale, has to be paid [3-7].
To safeguard the minimum required level of consensus every time, all the prevailing Blockchain architectures utilize some form of data and functional redundancy [8], often in the form of State Machine Replication [9]. This comes at a considerable cost for the nodes, leading back to centralization. Yet in general, the more the redundancy in a BC system, the more the fault and failure tolerance it delivers. In a more abstract social systems’ equivalence, the more the common sense and the shared values in a community, the more its coherency [10].
The resilience resulting from replication has a strong theoretical foundation as well: more redundancy results in lower overall system entropy, making it easier for the BC to serve its purpose as a zero-entropy reservoir.
In this work we investigate the Bolzman-Shannon entropy of a generic Blockchain consensus-enabling mechanism with respect to the degree of information redundancy in it. We demonstrate that consensus, being expressed as the complement of disagreement in a system, resembles a Lyapunov function: a positive definite function that decreases as the agent’s states converge.
Modeling Consensus
In nature, living organisms have inherited the ability to decode their sensorial inputs. An analogous inheritance property is infused in the autonomous artificial systems, for its atoms (i.e. the agents/nodes) to be able to reach consensus.
Setting a macroscopic example, a cup should be a cup irrespective of the atomic bias in the perceptions (the personal viewpoints) of the observers (Figure 1). This is a challenging requirement if we consider the limitations of the atoms and thus of the system as a whole. As has been extensively demonstrated in [8], subjectivity is inevitable in finite capacity systems.
In multi-agent systems, consensus relies on the Mutual Proof of a property e.g. Proof of Work, Proof of Stake, Proof of Capacity, Proof of Existence. This comes along with the requirement that the autonomous nodes have the individual capacity to prove, as well as to check the validity of the proof for themselves.
Consensus dynamics describes how a group of autonomous entities such as IoT devices, robots, sensors, drones, organisms coordinate their actions or inner states to reach an agreement.
In our exemplar, for the system to converge (i.e. for the observers to agree that what they see is actually the Cup), the outcome of their perception function(s) must be “close enough”: the likelihood that the Cup was the actual object in the initial input of the perception function needs to be above a certain threshold for all the consenters.
Due to its intrinsic complexity, consensus is susceptive to various definitions; from more tangible and deterministic ones (e.g. agreement on the outcome of a simple algebra function) to more abstract ones (e.g. agreement on the differences between the Democrats and the Republicans). In its more primitive forms, consensus often takes the form of catholic axioms i.e. 1+1=2.
If someone attempts to take consensus back to its primeval origins, he will without any doubt reach back to the Aristotelean definition of “true” or “existent” (the ancient Greek “ών”) [11].
Reducing the subject of consensus to the extreme minima of a “one-bit-something”, consensus is reduced to an agreement on “true” or “false”, “being” and “not being”. This constitutes perhaps the strongest form of consensus in human perception [12]. Reducing the plurality of the system down to a single-entity universe, consensus becomes semantically identical to inner consistency (i.e. agreement with the self) [13].
At any rate, for the autonomous atoms/nodes/agents to be able to conclude on the consistency of their perceptions and to eventually reach consensus with each-other over an event, a set of internal validity rules has to operate within each one.
In this work we utilize the IoT micro-Blockchain framework [9] as a simple validity- enabling framework operating in each node. An overview of its basic points is quoted in section 2.
Our analysis on the BC systems’ consensus dynamics relies on three major pillars:
- The adoption of the Boltzmann-Shannon equation on information entropy as the basic tool for our analysis
- The modeling of consensus as a function of the number of nodes-witnesses consenting over an event (W)
- The acknowledgement of the disagreement in a system as a discrete Lyapunov stability function with respect to the number of the event-witnesses in a system
We then investigate the effect of W in the stability and the entropy of the system. We prove that the entropy of the system decreases more sharply for small values of W (for few but >0 event-witnesses). We also demonstrate that the effect of W on the stability of the system remains linear over W.
2. Materials and Methods
Consensus and Stability
In our approach, we deal with the simplest form of consensus, i.e. consensus over bit-events. In this perspective, consensus-achievement in system takes the form of a majority “count of 1’s”. The nodes who agree on the bit-event coincide with the consistent witnesses of the event. While this is intuitively valid for bit-events like switching a lamp on/off, it actually holds for every perception function with binary output, irrespective of the dimensions of the input vector .
In this work we demonstrate that disagreement, being the complement of consensus in multi-agent autonomous systems, can be modeled as a Lyapunov function linked with the information entropy of the system: a positive definite function that decreases as the agents’ states converge.
In general, a Lyapunov stability function is a scalar function with the following properties:
- at the equilibrium point x* (the desired degree of consensus reached, typically taken as the origin x=0, for simplicity).
- for all , meaning is positive definite around the equilibrium point.
- , meaning decreases or stays constant over time, ensuring that the system does not gain energy or move away from the equilibrium.
The contemplation behind the consideration of consensus in terms of Lyapunov stability is presented in section 3 Analysis & Results.
Perception and Consensus
Generalizing the Cup example, let an event object with k observable dimensions and , in be the perception functions of two distinct observers of the event. In the general case, perception is a function of reduction. being real numbers representing the observable attributes of the event (the magnitudes of the Event in every observable dimension), the and often produce their results in a lower-dimesion space .
From the collective point of view, the ends up being the aggregate of all the perceptions in the world, i.e. .
The Perception Convergence function over the event can consequently be defined as the distance of the two perceptions . To determine agreement, thresholds are defined. If , then the two perceptions converge; both observers 1 and 2 perceive as “the Cup”.
In its essence, consensus is a bit function that determines whether two observers agree or disagree upon the event : .
If for simplicity we try to reduce the data describing the event down to a single bit (e.g. the Event is the mere opening of a door), then and consensus upon is reduced to its most primitive semantic form (occurrence/not occurrence, existence/nonexistence of ).
At any rate, the Collective Consensus of a realm of N nodes over the event E represents the number of the nodes that have observed (witnessed) the Event and agree on it:
and the normalized Collective Consensus is the percentage of the nodes in the realm that consent on the event E: . (a)
In the world of Blockchain, reaching consensus over a new event has an additive impact as well. As soon as a node agrees on the validity of the new , he accepts as valid the whole sequence of the events in the chain since the beginning of the recordings . At the cost of running the Blockchain, the overall normalized Collective Consensus becomes identical to the average percentage of the nodes that agree on each upcoming event , aka the Witnesses of [14].
For a Blockchain system to be stable, a minimum number of W consenting nodes has to be reached. In other words, we need (b) in the chain, setting the down-limit for since at least W per event witnesses is mandatory. This way equation (a) becomes .
The boundaries for W are widely investigated under the Byzantine Fault Tolerance conceptual framework [15]. If everyone is a witness of every new event, then consensus becomes absolute () and consequently .
This holds especially true for the case of blockchain architectures that are built to facilitate monetary/ownership transfer transactions (like the Bitcoin Blockchain).
Modeling the Entropy of Collective Consensus
In our approach, we investigate the entropy differential from the simplistic perspective of the free memory in the system. In our consideration, the memory of the nodes (and consequently of the system as a whole) is logically divided in two parts: the memory allocated to witness the events of the others, and the free memory remaining to store unique own events. The more the free memory in the system, the more the Shannon entropy it bears (analyzed in detail in section 3). We treat witnessing as the mere cloning, transmission and storage of the data of an event on the local memory of W siblings. To enable this, we utilize the properties of the IoT micro-Blockchain framework defined in [9], the main points of which we quote here.
The IoT Micro-Blockchain Framework
If someone tries to skim Blockchain to its absolute essentials, he will come down to a minimal functionality that every node has to be capable of carrying out of in order to be able to invoke in peer Blockchain operation with its siblings. The IoT micro-Blockchain is such a framework. It considers a peer network of minimal autonomous nodes capable of the essential BC functionality, namely, of peer communication and of essential information processing to facilitate hashing. Each node bears a limited amount of memory in order (a) to keep a small core of initial “inherited” programs (ROM-like part of reserved memory) and (b) to store the events data (RAM-like active memory).
Thus, the active memory of each node (M) is further semantically divided in two parts: the M_local that keeps the information of the events that take place inside the node, and the M_others that keeps the information of the events that take place in others (Figure 2).
Each node has a memory capacity of M blocks, each block storing the data of a single event. The events are stored in the memory of the node monotonically in time forming a local event hash-chain.
The active memory stores both local events as well as external events (events that took place on other nodes) on which the node is a witness, and thus we get:
The system is self-contained. New events are taking place only within each of the N nodes of the system. In the light of a new event, W witnesses are being contacted to record it (Figure 3).
The current work is built on proving a plain assumption: the more the witnessing in a system, the more the stability and the fault-tolerance it infuses. This comes along with the observation that the more the redundancy in a system, the more the cost that has been paid for it (the resources that have been invested) within the containing supersystem to establish and support the process. From the technical point of view, more memory cells and processing units are provided to the contained subsystem.
At the cost of running its consensus mechanism, the inner system tends to move towards a more stable and reduced-entropy state. This is getting more apparent while contemplating the causativeness and the finiteness of the digital systems. Since the digital systems are finite systems, the more the replication in them, the less the remaining free memory (memory to store unique events) and thus the information entropy of the system.
This simplistic observation, however, conceals the fact that redundancy itself comes at a significant thermal cost hidden in the production and maintenance of memory cells, in the computation/accumulation of the contents of the memory, etc. [16].
3. Analysis and Results
Based on our previous considerations, we demonstrate the behavior of Information Entropy and Stability in distributed systems with respect to the event-witnesses W.
Stability and Consensus
Lyapunov Equilibria
Under the perspective of Consensus, every Blockchain system tends to be in a completely steady state, apart of course from the moment of the rise of a new to-be-added-to-the-chain event, and until this is successfully added. As soon as consensus is reached upon the new event(s), the system becomes finalized and steady over again. Every Blockchain is explicitly and specifically designed to serve this function. Seen under the Lyapunov stability perspective, a functional Blockchain will always move around this consensus equilibrium.
This said, in the general theoretical case of a totally peer, node-agnostic Blockchain system of N nodes, in order to reach consensus, NxN peer agreements have to be investigated upon every new event. In a totally peer and decentralized environment, everyone should match his perception against the perception of every other to conclude on convergence.
In the real world though, a way more efficient approach has been adopted. Every agent carries a pre-determined vision of the Cup, a consistent personal representation of an [12]. He then matches his sensorial inputs against it to determine the degree resemblance. In autonomous systems, everyone carries an inherited build-in validity framework.
To simplify and generalize our consideration, let be the perception of the observer i on the Cup, and the representation of the Ideal Cup in its memory. Macroscopically, the Ideal Cup may be defined as the median, the mean, or any other aggregate representation that minimizes perception differences (aka disagreements) among the observers. The incarnates a collective Lyapunov equilibrium over the Cup.
Irrespective of the details of the aggregation that defines the Ideal Cup, we can define a binary distance function with if is “close enough” to to be perceived as the Cup and consequently for observer i to become a Witness of the existence of the Cup, and if is not “close enough” to .
As stated before in section 2, for binary-outcome perception functions, consensus can be modeled as the mere count of Witnesses upon .
The number of the Witnesses becomes:
We can then define a function representing the degree of disagreement over the Cup, with respect to the normalized Collective Consensus over the event E as:
In this perspective, is a scalar that satisfies all the properties of a Lyapunov function, since:
at the equilibrium (total consensus W=N),
when W<N (not all agree on the cup)
decreases monotonically as W increases, with rate:
The derivative is negative, highlighting that decreases increasing W. This aligns perfectly with the intuitive notion of system stability: the more the nodes that agree on the Cup are, the more the stability of the system becomes, and the corresponding Lyapunov function of disagreement moves closer to 0.
The rate of change is constant . This suggests that each additional witness has a fixed impact on reducing linearly, pushing the system closer to the consensus equilibrium. Since N is a positive natural number representing the number of autonomous nodes in the realm, always holds, ensuring that decreases monotonically with W. This negative rate of change reflects that the system moves towards increased stability as more nodes agree on the Cup, stressing the Lyapunov stability properties of .
Information Entropy and Consensus
Consensus among autonomous peer individuals is an inference process which relies on the mutual proof of some property, such as PoW, PoS, PoE, PoA. For this to take place, both functional and data redundancy is mandatory among the nodes: to conclude on the validity of the outcome, we need to share the initial data describing the event, as well as some processing principles.
This suggests that redundancy, which in the prevailing Blockchain systems is often realized in the form of pure state replication, is an essential integral part of the process of the consensus. As a macroscopic observation we may pose that “the more the information we share, the more the chances to reach to common perception on an event” – aka consensus.
Yet, in a finite capacity system, (and consequently in every digital system), this inevitably points to less free memory in the system and points directly to reduced overall system entropy.
Shannon Information Entropy
The general Shannon entropy formula for a discrete probability distribution is given by:
where H the entropy of the system, s the total number of possible states and the probability of each state, where i=1,2,…,s [1].
For combined binary events, H goes and is measured in bits:
In our model (i.e. IoT micro-BC), the unique events that are stored in the local memory of a node are given by
and consequently, the count of all the unique events in the system is
This corresponds to the total number of memory blocks that are assigned in our system to store unique events.
Without hurting generality, we can consider for simplicity that the stored events are binary (1 bit per event). Then, the whole of the unique events in the system can be represented as a bit-stream of bits.
To maximize the information capacity and to set the upper limit of the entropy of the system, we consider that every event combination has equal probability to occur.
Then, the total number of unique events in our system is bit-long and the probability of any unique event combination becomes:
Substituting into Shannon’s Entropy Formula we get:
and since is equal for every unique event, we get
Further substituting in the entropy formula, we get
Which, further simplifies in:
This strengthens our initial assertion: the entropy drops proportionally to the increment of the witnessing in the system.
In Figure 4 we see the effect of W on the overall Shannon entropy H in a static system of 100 nodes, while in Figure 5 we see the impact of both W and N respectively, with N varying from 1 to 100 and W ranging from 0.1 to N-1 for Mnode =1000 bit every time.
To determine the degree of the entropy reduction with respect to W, we differentiate H over W:
and since , the derivative of H with respect to W becomes
This represents the rate at which the entropy drops increasing W.
Again, in Figure 6 we see the effect of W in the pace of the entropy reduction in a static system of N nodes, while in Figure 7 we see the impact of both W and N, with N varying from 1 to 100, W ranging from 0.1 to N-1 and Mnode =1000 bit.
We observe that the drop is steepest for low values of W. This highlights the fact that the effect of witnessing in the entropy of the system is higher for small values of W.
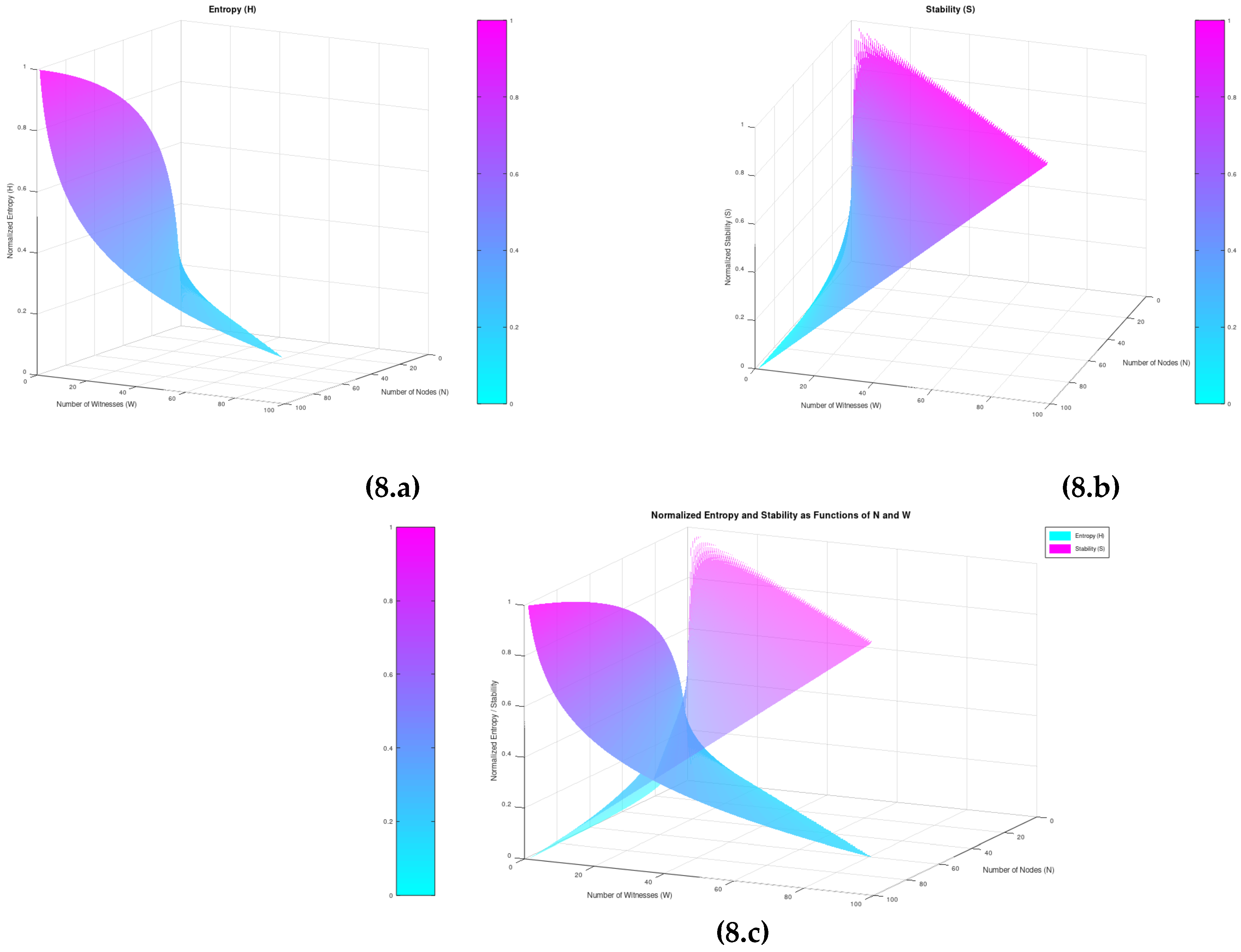
Figures 8(a,b,c) illustrate the meshes of the normalized entropy and stability with respect to N and W as well, to highlight the tradeoff between the information entropy and the stability of the system.
The optimization of W is in its essence, a quest for the steepest information entropy reduction path that guarantees the desired degree of stability every time and is subject to the needs of each specific application and architecture.
Measuring efficiency
While seeing Blockchain consensus mechanism as an entropy-conversion mechanism, its efficiency can be defined as the overall information entropy drop (bit) per consumed power (Watt). The actual absolute power consumption in the IoT micro-Blockchain model utilized in this work, as well as in any consensus-achievement architecture, is not constant over W. It is subject to a number of implementation-related factors such as the value of population count N, the computational efficiency of the nodes, the infinitesimal per memory cell power consumption, the minimum per-event witnessing processing required, the existence/absence of a broadcasting channel, and the conflicts relating to new events’ frequency and distribution among the nodes. These are subject to extensive analysis in other evolving works.
4. Discussion
Consensus achievement constitutes a major pillar of every Blockchain Architecture and information redundancy is an integral part of the consensus process.
Every digital system is a finite capacity system in which, as the Information theory suggests, the less the free memory, the less the information entropy. In an attempt to reduce the overall entropy of digital systems, many mechanisms and policies have been devised, among which is the Blockchain. While the robustness and the resilience of the Blockchain are acclaimed for their application in the world of transactional systems and cryptocurrencies, its attributes can benefit every autonomous system [17].
The impact of Replication on the Information Entropy of Blockchain-based systems
The prevailing Blockchain architectures greatly rely their universality and robustness on the virtue of majority: in the light of a dispute, the majority prevails. The process is facilitated through information replication [18]. The nodes in a Blockchain realm need to at least share a common logic to tell valid from false (functional redundancy), as well as the data of the event(s) that they are meant to prove or verify (data replication). Absolute, state machine replication is proclaimed and enforced in many prominent architectures [18,19,26,27].
However, replication can be equivalently perceived as an effective way to reduce the overall resources available in the system in order to process and store unique events. The “free-memory”, or under the K. Fristones’ perspective the “free-energy” of the system decreases, and along with this, the information entropy of the system decreases proportionally [20,21]. Yet, it is this exact entropy reduction that constitutes perhaps one of the most desired traits in every artificial system, and a profound reason behind the success of the Blockchain technology.
In a broader perspective reduced entropy strongly relates to life itself [22]. Under the scope of the Second Law of Thermodynamics, entropic efficiency seems to be a substantial feature of existence: the degree of entropy-reduction that can be achieved per consumed power unit underlies in the definition of the efficiency of every process, and the consensus-achievement mechanisms do not escape the trait. In this work we present a way to measure the information entropy reduction they bring to the system, and based on this, to point to a new universal way to measure their efficiency. Nature’s tendency to follow the steepest entropy ascendance paths, comes hand-in-hand with systems’ primary tendency towards adopting the steepest entropy reduction paths [23].
Conceptually seen, Replication drives Uniformity, which in turn plays a vital role in nature and in human society as well: Biological replication infused in the atoms as chromosome inheritance, as well as data replication infused through learning and education, establish a certain degree of “common sense” among the atoms [24]. Down the line, it enables the atoms to act autonomously and with the need of fewer witnesses (and verifiers), yet in consistency with each other. In an ideal world, every atom should be equipped with the means to act autonomously, while consensus would always be guaranteed [25].
In this work we model replication as common events’ witnessing, and we prove that it has a significant, non-linear impact on the entropy reduction of the system: the less the existing witnesses in a system, the more the entropy decrement per additional witness becomes.
For simplicity we consider a constant average power consumption per event-witnessing. In practice though, the cost of witnessing is exponentially increasing with W, due to conflicts within and among the nodes that trigger increased retransmission and reprocessing requirements [9].
We demonstrate, that in terms of entropy conversion, it is more efficient to keep the number of event-witnesses as low as possible in order to support the desired level of stability every time. In our quest for Blockchain optimization, this rational tradeoff reflects once again the necessity for scalability in the consensus process: we need to support the desired level of entropy and stability, at the lowest possible power cost. Under this perspective, the absolutistic requirement that every peer node gets to know and hold every single transaction in the network since the beginning of time, (i.e. at all times), which was posed during the infancy of the Blockchain architectures (such as the early stages of Bitcoin), is proved here to be the most inefficient in terms of information entropy reduction.
The impact of W on Stability
Having modeled replication as common event witnessing, we quantify the contribution of adding more witnesses to the stability of the system. We define a function representing the degree of disagreement over the exemplar event E (the recognition of a Cup), with respect to the normalized Collective Consensus over the event E and prove that it bears all the properties of a Lyapunov function. We also demonstrate that in contrast to its impact on the entropy, the impact of W on the stability of the system remains linear irrespective of its magnitude.
Functional redundancy vs Pure data replication
In many contemporary Blockchain architectures, the number of the witnesses tends to be reduced (W<<N), without compromising the robustness of the system [26,27]. The community realizes the benefits of scalability on the consensus achievement-process and strategy. The careful observer may pose and support the idea that the introduction of more functional than data redundancy in as system (as for example the utilization of more Merkle tree-like structures), introduces high robustness effects for significantly low(er) values of W. Still, this is often misleading and concealing of important aspects:
- The robustness of the system may take various forms, often exceeding the pure BFT consensus consideration (e.g. tolerance to physical disasters), imposing high values of W as a primeval functional mandate.
- Such functionality-redundancy mechanisms, while seen under the prism of the second law of thermodynamics are significantly energy-consuming, and thus are expected to move the overall efficiency away from optimum.
The debate between functional redundancy and pure data replication holds strong. Which one is the most efficient? Irrespective of the nature of the redundancy, through this work we propose a metric of the efficiency of the consensus-enabling mechanism as the ratio of the phenomenal (observable) information entropy reduction to the overall energy consumed to achieve it. During this study we identified early signs of evidence that while pure data replication has a directly measurable impact in the information entropy of the contained system, the overall entropy impact of functional redundancy can be better integrally estimated at a higher level (i.e. in the containing super-system), as if executing an entropy-reduction piece of code, (such as a building a Merkle-like hash-tree), coincides with some form of derivative on the event data with respect to the external variable of time.
At any rate, in order to make more copies of the information in a system as well as to process information multiple times, more resources must be consumed to the containing supersystem for building and running more memory cells and for processing and sharing more data [28]. With respect to the second law of thermodynamics, the overall entropy of the containing systems is expected to increase in every step in both cases.
5. Conclusions
In this work we study the consensus process in a system under the perspectives of Shannon Information entropy and Lyapunov stability. Through functional modeling, we prove that the impact of W on the information entropy reduction of the system is higher for lower overall values of witnessing.
This constitutes a breakthrough finding with broader resonances. Generalizing, someone may come to justify wider societal, academic and financial choices taken over time, as for example the fact that a few only witnesses are usually adequate to drive solid verdicts in the courts of Law, a few only reviewers are utilized for assessing academic articles and guarding the validity of the publications, and the reason behind the prevalence of singular third-trusted authorities like the central Banks throughout the history. The prevalence of low-witnessing policies becomes clear and justified under the lens of information entropy reduction efficiency. Still, we demonstrate that when it comes to the stability of the system, witnessing is linear, contributing a constant amount per witness irrespective of the overall number of witnesses.
The tradeoffs between entropy reduction, stability and power consumption arise inevitably. How much redundancy is needed in a Blockchain system to achieve optimal levels of consensus and stability without overburdening resources? This study sets the foundations for quantifying the efficiency of the consensus-achievement processes in terms of information entropy reduction, facilitating future research and development decisions aimed at optimizing the Blockchain systems.
Author Contributions
Conceptualization, A.A.; methodology, A.A., E.G.; software, A.A.; validation, E.G.; The authors have read and agreed to the published version of the manuscript.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Shannon, C.E. A Mathematical Theory of Communication. Bell System Technical Journal 1948, 27, 379–423, 623–656. [CrossRef]
- Lyapunov, A.M. The General Problem of the Stability of Motion; Taylor & Francis: London, UK, 1992.
- Rivest, R.L. Cryptography and Machine Learning. In: Imai, H.; Rivest, R.L.; Matsumoto, T. (eds) Advances in Cryptology — ASIACRYPT '91. Lecture Notes in Computer Science, Vol. 739. Springer: Berlin, Heidelberg, 1993. [CrossRef]
- Laskari, E.C.; Meletiou, G.C.; Stamatiou, Y.C.; Vrahatis, M.N. Cryptography and Cryptanalysis Through Computational Intelligence. Studies in Computational Intelligence 2007, 57, 1–49. Springer-Verlag Berlin Heidelberg.
- Blum, A.; Furst, M.; Kearns, M.; Lipton, R.J. Cryptographic Primitives Based on Hard Learning Problems. In: Advances in Cryptology - CRYPT0 ’93. LNCS 773, Springer: Berlin Heidelberg, 1994; pp. 278–291.
- Laskari, E.C.; Meletiou, G.C.; Tasoulis, D.K.; Vrahatis, M.N. Studying the Performance of Artificial Neural Networks on Problems Related to Cryptography. Elsevier Nonlinear Analysis: Real World Applications 2005. [CrossRef]
- Goncharov, S.V. Using Fuzzy Bits and Neural Networks to Partially Invert Few Rounds of Some Cryptographic Hash Functions. arXiv preprint 2019. Available online: https://arxiv.org/pdf/1901.02438.pdf (accessed on March 2024).
- Anagnostakis, A.G.; Naxakis, C.; Giannakeas, N.; Tsipouras, M.G.; Tzallas, A.T.; Glavas, E. Scalable Consensus over Finite Capacities in Multiagent IoT Ecosystems. IEEE Internet of Things Journal 2022. [CrossRef]
- Anagnostakis, A.G.; Giannakeas, N.; Tsipouras, M.G.; Glavas, E.; Tzallas, A.T. IoT Micro-Blockchain Fundamentals. Sensors 2021, 21, 2784. [CrossRef]
- Graziano, M. Consciousness and the Social Brain. Oxford University Press: New York, NY, USA, 2013; ISBN: 978-0199928644.
- Aristoteles (284~322 B.C.) “Hθικά Νικομάχεια” Book 1, pp VII available online at: https://www.greek-language.gr/digitalResources/ancient_greek/library/ browse.html?text_id=78&page=8 Last Accessed May 2022.
- Heekeren, H., Marrett, S. & Ungerleider, L. The neural systems that mediate human perceptual decision making. Nat Rev Neurosci 9, 467–479 (2008). [CrossRef]
- Luu L, Stocker A. Post-decision biases reveal a self-consistency principle in perceptual inference. eLife. May 22 2018, . [CrossRef]
- Kreder, K.; Shastry, S. POEM: Proof of Entropy Minima. arXiv preprint arXiv:2303.04305, 2023. Available online: https://arxiv.org/abs/2303.04305 (accessed on June 2024).
- Lamport, L.; Shostak, R.; Pease, M. The Byzantine Generals Problem. ACM Trans. Program. Lang. Syst. 1982, 4, 382–401.
- Clausius, R. The Mechanical Theory of Heat – With Its Applications to the Steam Engine and to Physical Properties of Bodies; John van Voorst: London, UK, 1867.
- Dwork, C.; Lynch, N.; Stockmeyer, L. Consensus in the Presence of Partial Synchrony. J. ACM 1988, 35, 288–323.
- Vukolic, M. The Quest for Scalable Blockchain Fabric: Proof-of-Work vs. BFT Replication. Open Problems in Network Security 2016, 9591, 112–125. [CrossRef]
- Nakamoto, S. Bitcoin: A Peer-to-Peer Electronic Cash System. Bitcoin.org, 2008. Available online: https://bitcoin.org/bitcoin.pdf (accessed on May 2024).
- Friston, K. The Free-Energy Principle: A Unified Brain Theory? Nat. Rev. Neurosci. 2010, 11, 127–138. [CrossRef]
- Andrews, M. The Free-Energy Principle: An Accessible Introduction to Its Derivations, Applications, and Implications. ResearchGate 2009, Available online: https://www.researchgate.net/publication/324246948 (accessed on December 2021).
- Schrödinger, E. What is Life? The Physical Aspect of the Living Cell; Cambridge University Press: Cambridge, UK, 1944; ISBN 978-1107604667.
- Beretta GP. The fourth law of thermodynamics: steepest entropy ascent. Phil. Trans. R. Soc. A 378: 20190168, 2020 Available online at: Accessed on Apr. 2022. [CrossRef]
- Chen, J., et al. Resilient Consensus Sustained Collaboratively. arXiv preprint arXiv:2302.02325, 2023. Available online: https://arxiv.org/abs/2302.02325 (accessed on Dec 2024).
- Vogels, W. Eventually Consistent. Commun. ACM 2009, 52, 40–44. [CrossRef]
- Szabo, N. Smart Contracts: Building Blocks for Digital Markets. University of Amsterdam, 1994. Available online: https://szabo.best.vwh.net/smart.contracts.html (accessed on March 2021).
- Buterin, V. Ethereum Whitepaper. Ethereum Foundation, 2015. Available online: https://ethereum.org/en/whitepaper/ (accessed on September 2024).
- Merkle, R.C. A Digital Signature Based on a Conventional Encryption Function. Advances in Cryptology 1987, 293, 369–378.
Figure 1.
Subjective perception functions.
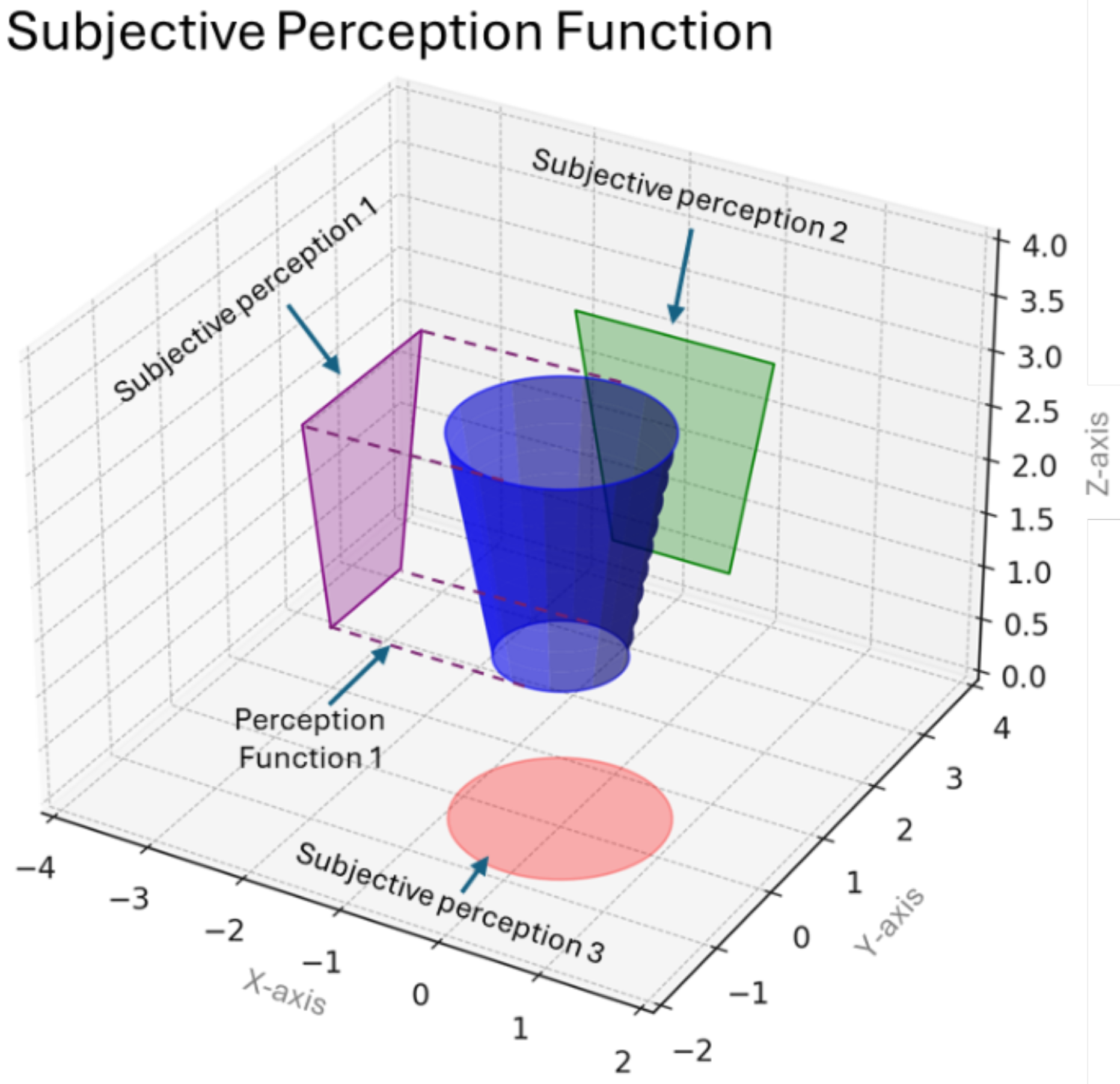
Figure 2.
The Logical Memory Blocks of the autonomous node.
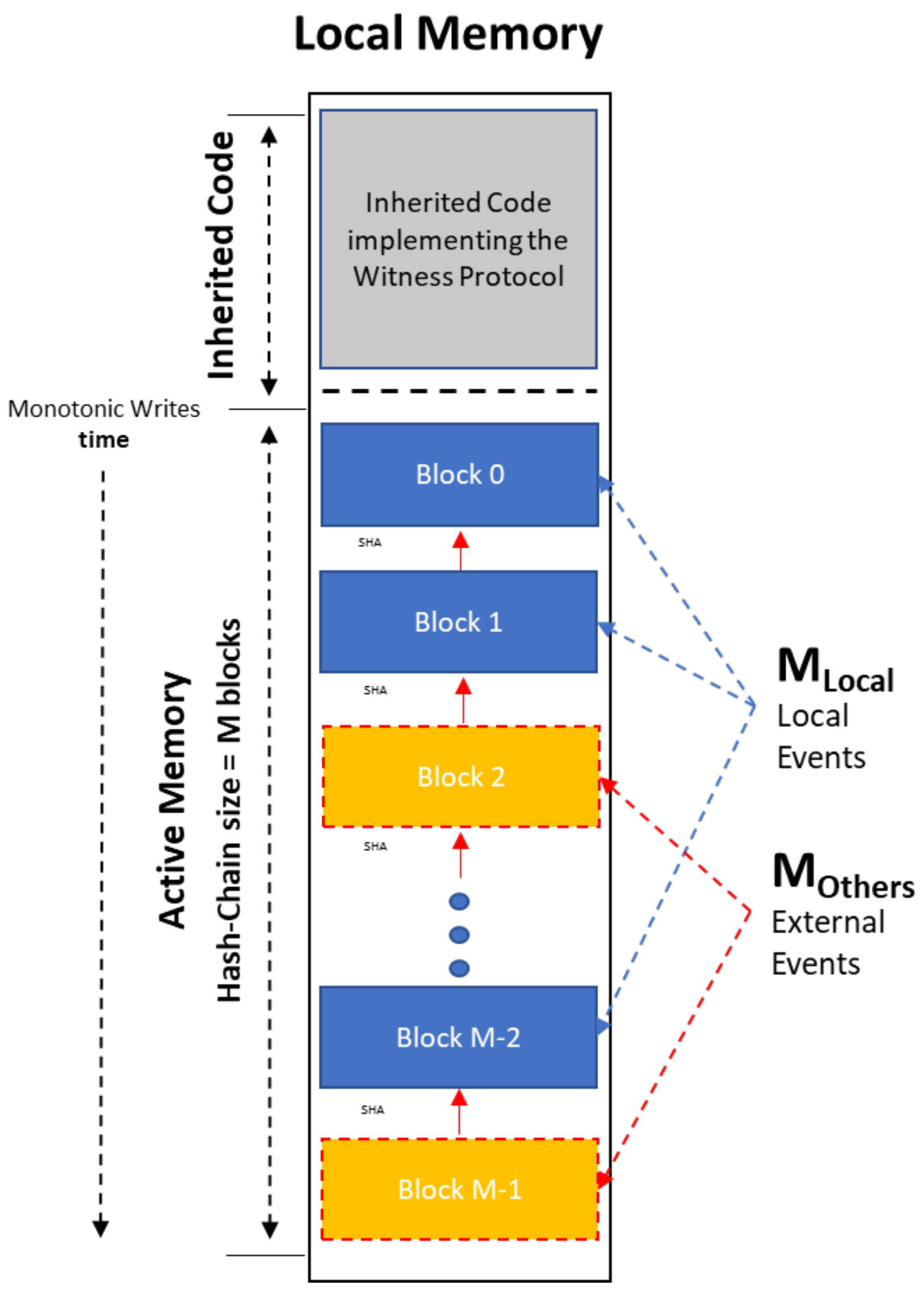
Figure 3.
The IoT micro-BC network (published after [9]).
Figure 3.
The IoT micro-BC network (published after [9]).
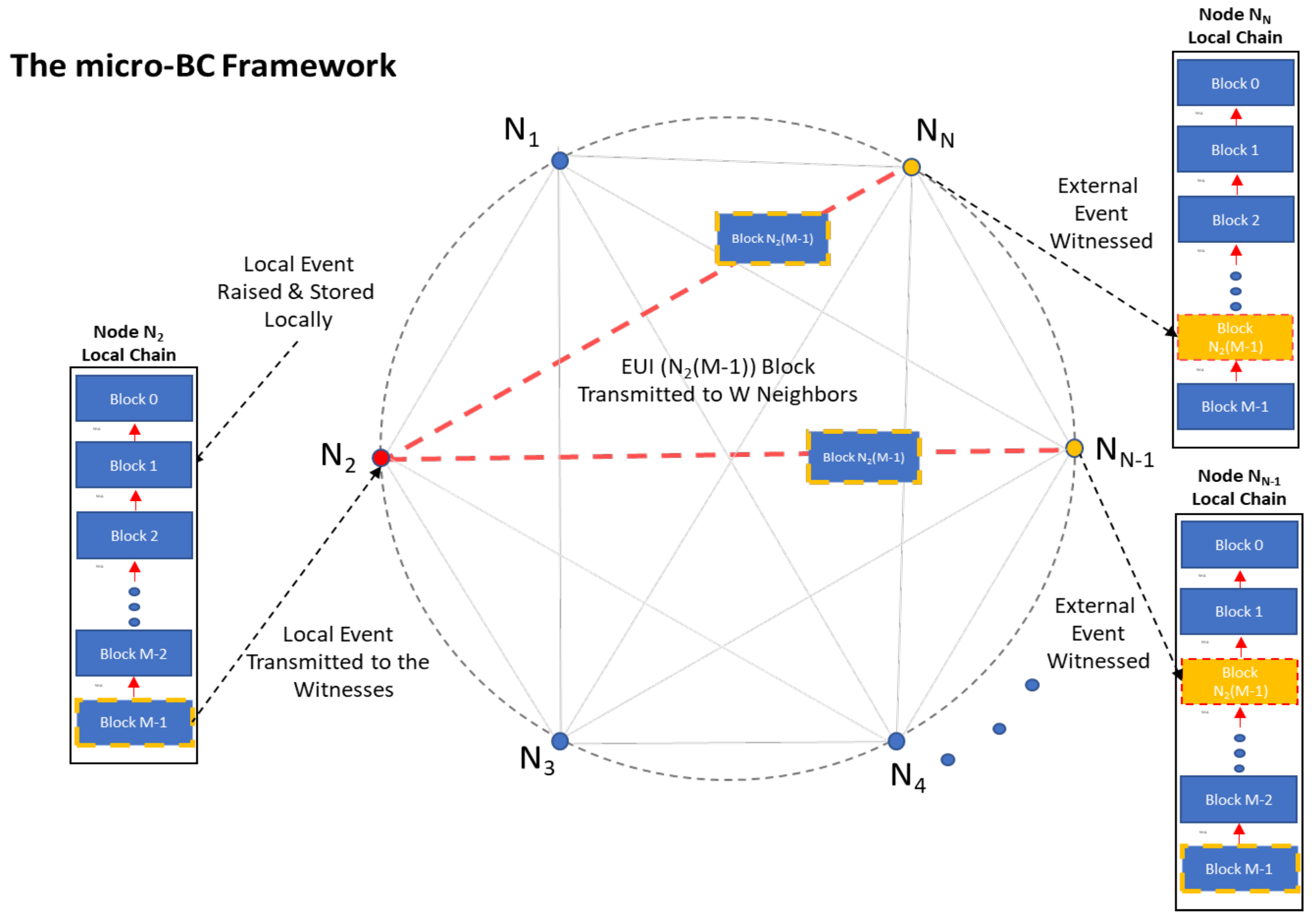
Figure 4.
Shannon entropy as a function of W in a realm of N=100 nodes for M=1000bit.
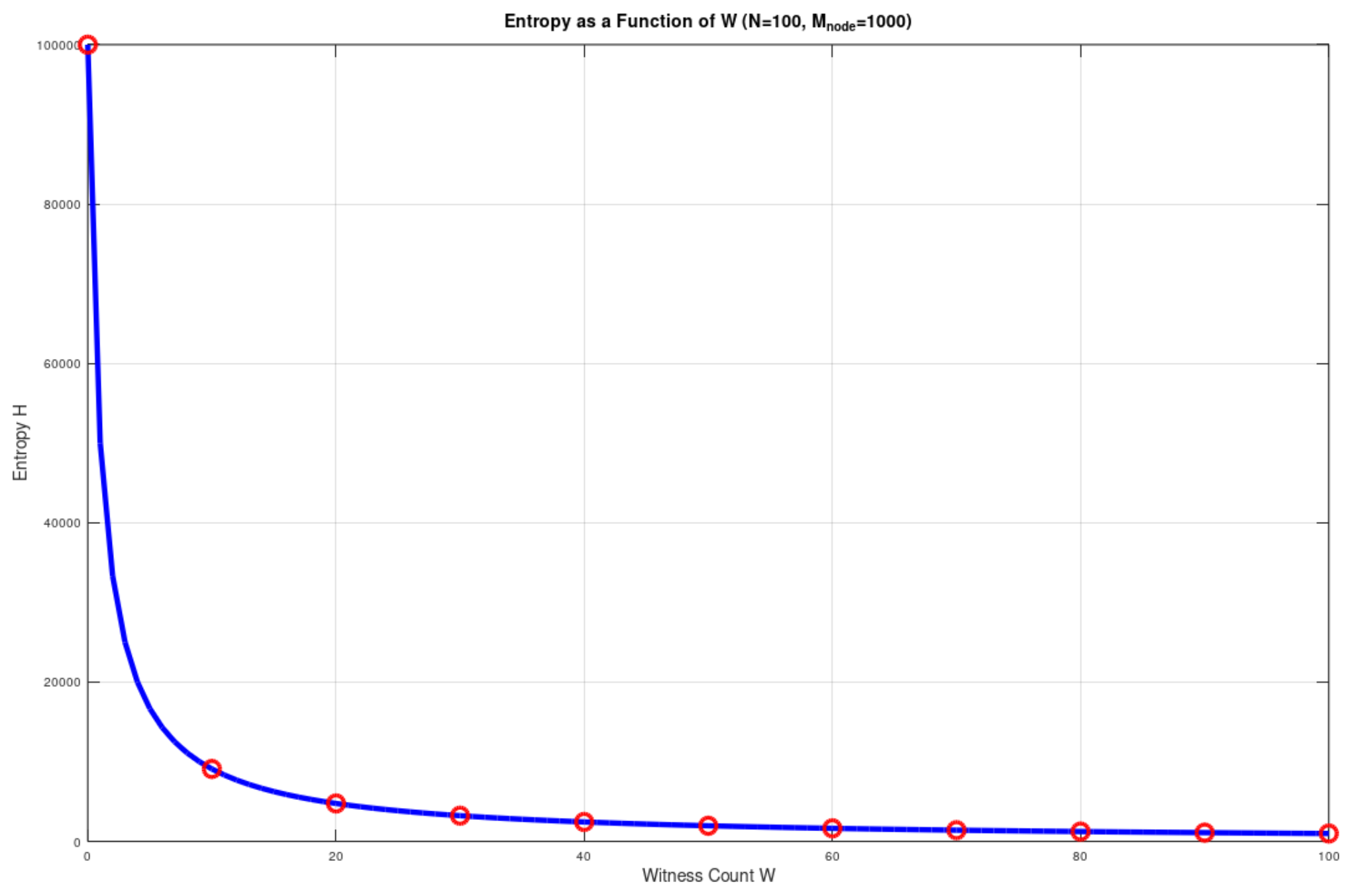
Figure 5.
Shannon entropy as a function of N and W (N=1:100 nodes, W=1:N-1, M=1000 bit).
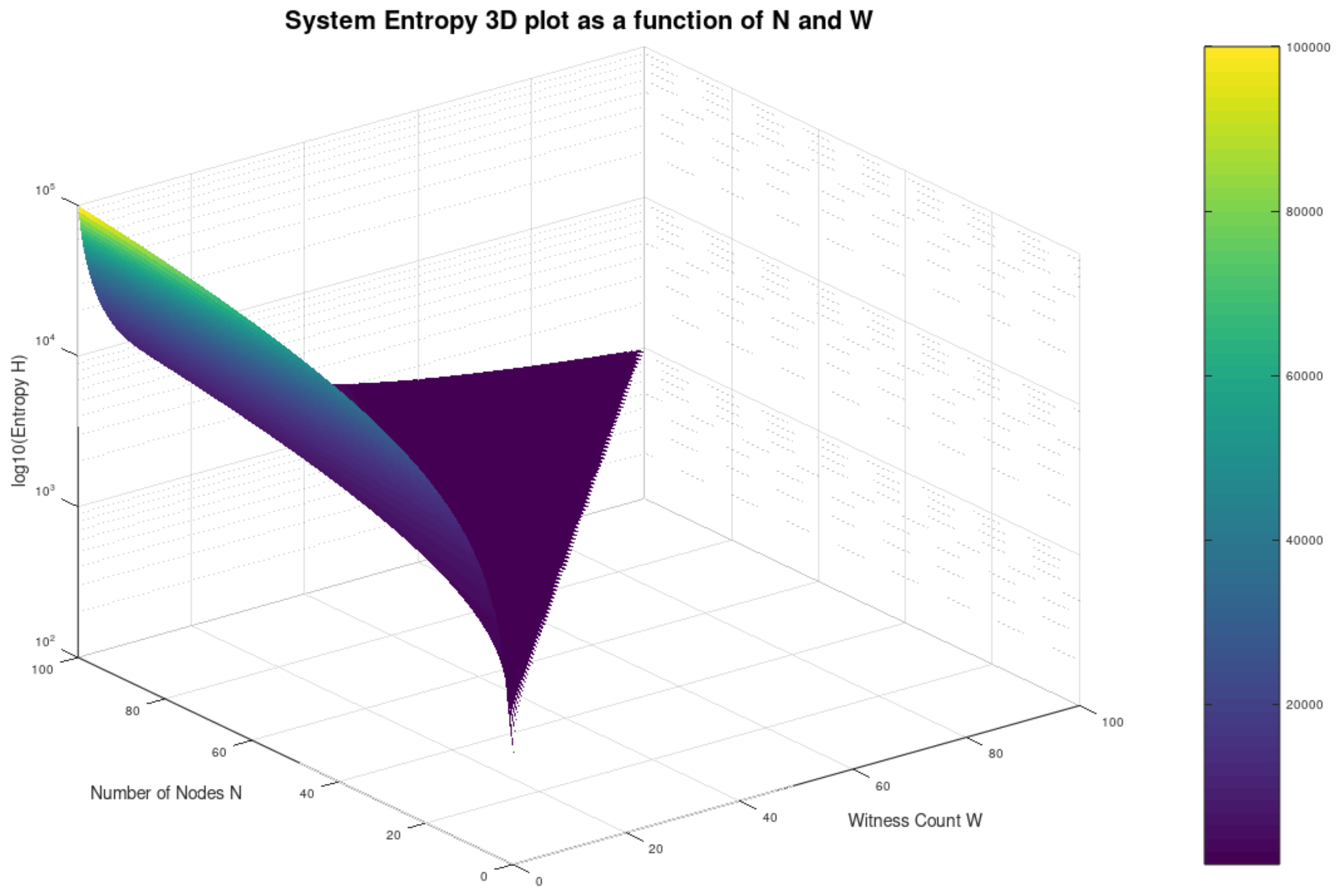
Figure 6.
Entropy pace with respect to W (N=100 nodes, M=1000 bit).
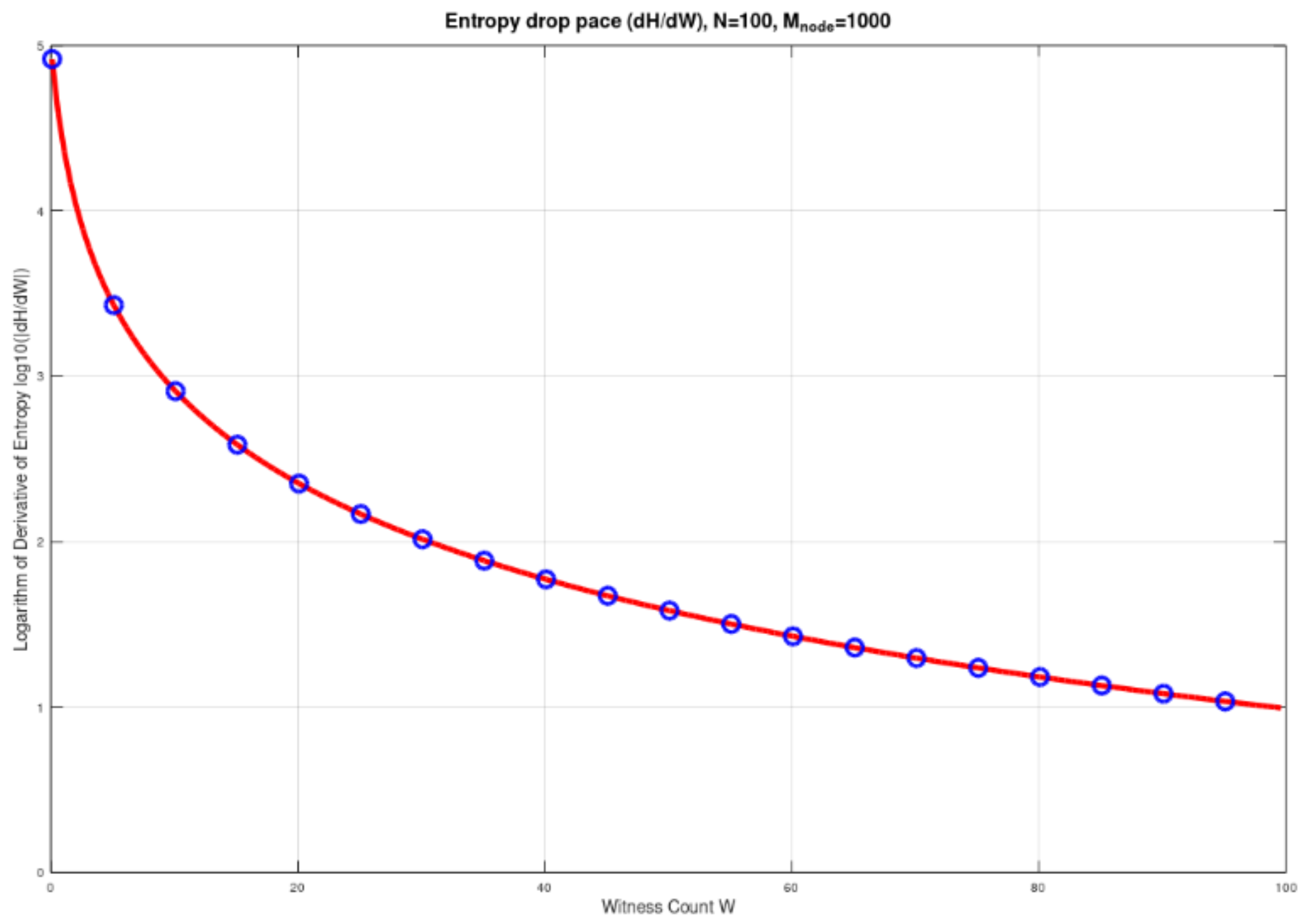
Figure 7.
Entropy pace with respect to N and W, (N=1:100 nodes, W=1:N-1, M=1000 bit).
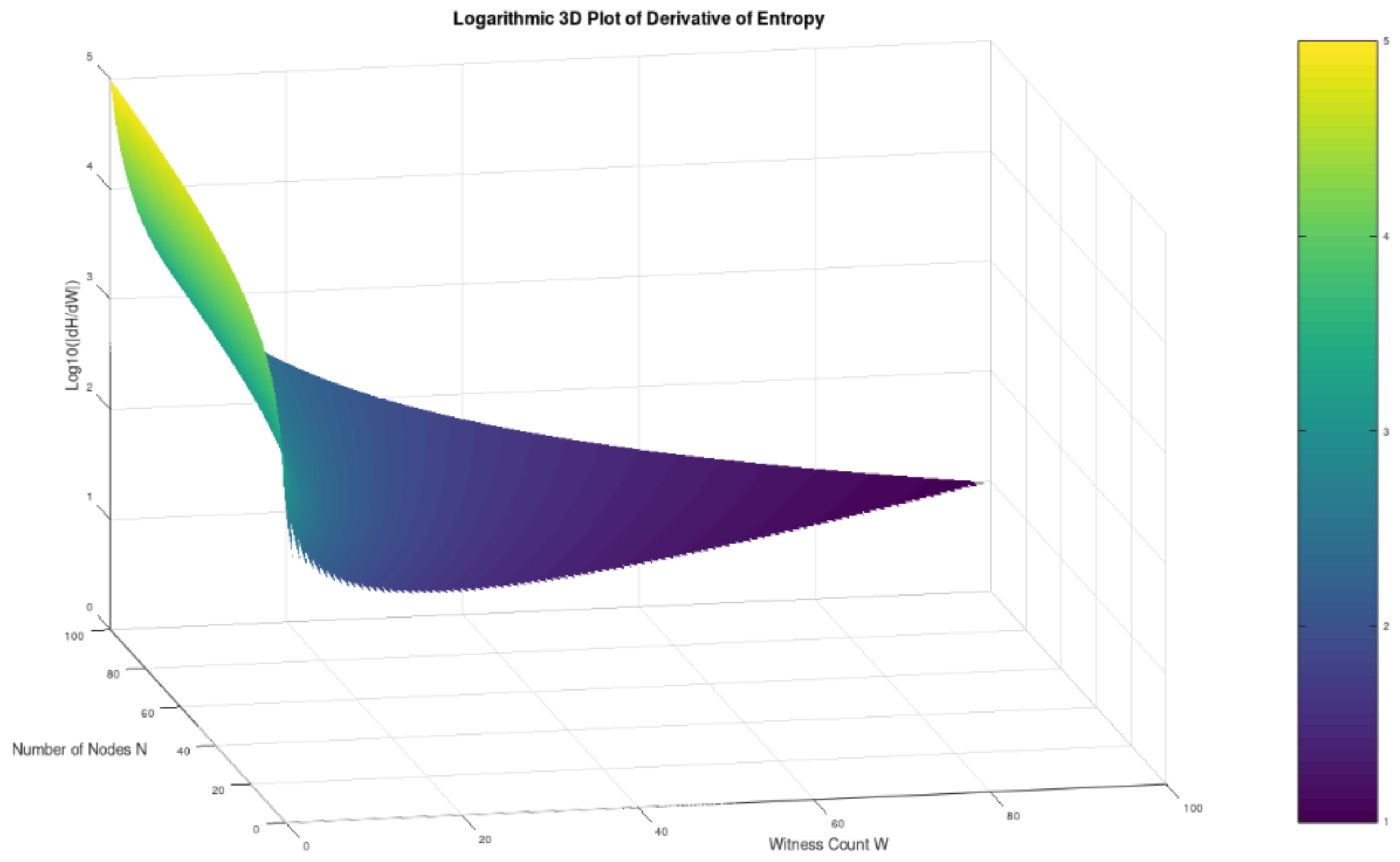
Figure 8.
(a,b,c): Normalized Entropy (a) Normalized Stability (b) Combined mesh (c) (N=1:100, W=1:N-1, M=1000 bit).
Figure 8.
(a,b,c): Normalized Entropy (a) Normalized Stability (b) Combined mesh (c) (N=1:100, W=1:N-1, M=1000 bit).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



