
Submitted:
24 December 2024
Posted:
26 December 2024
You are already at the latest version
Abstract
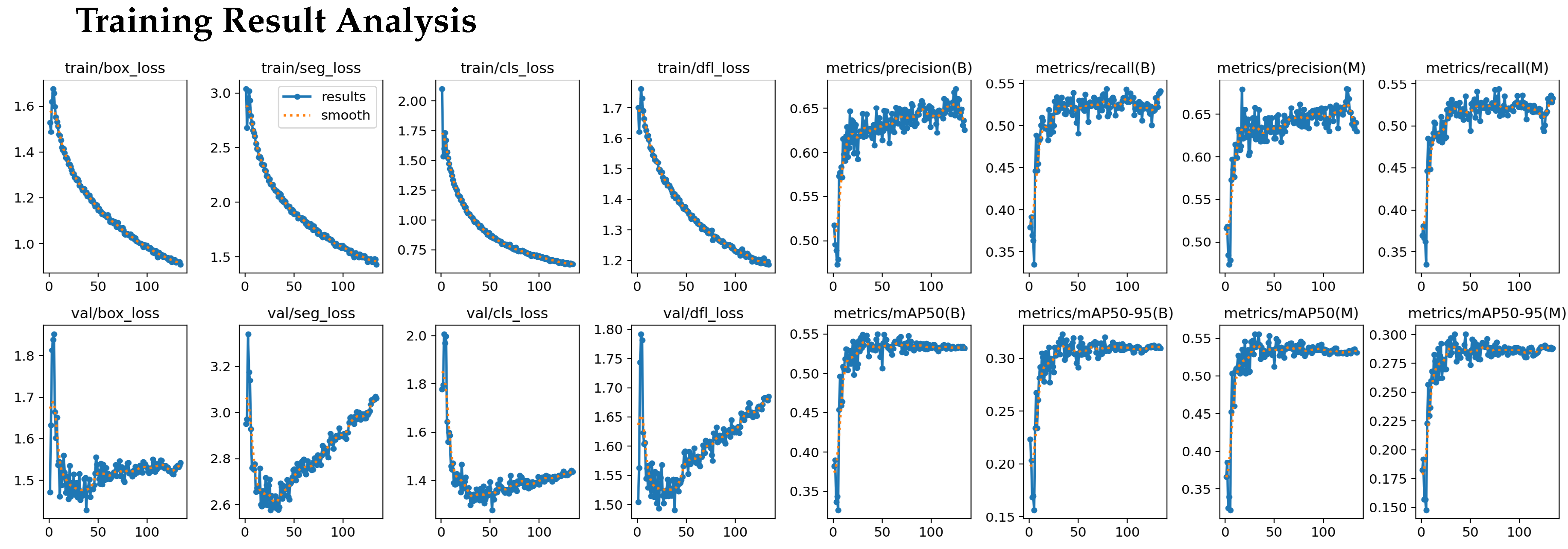
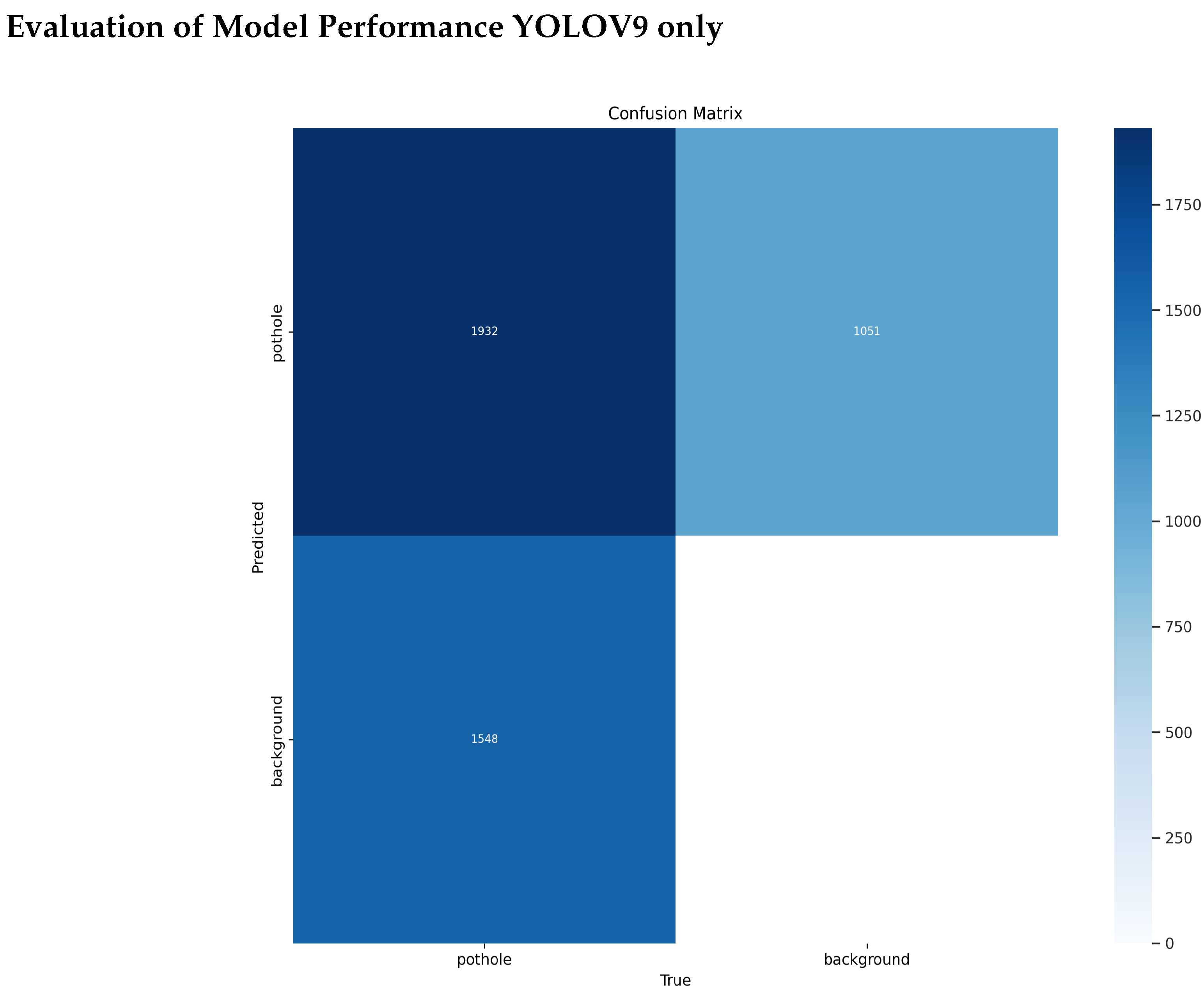
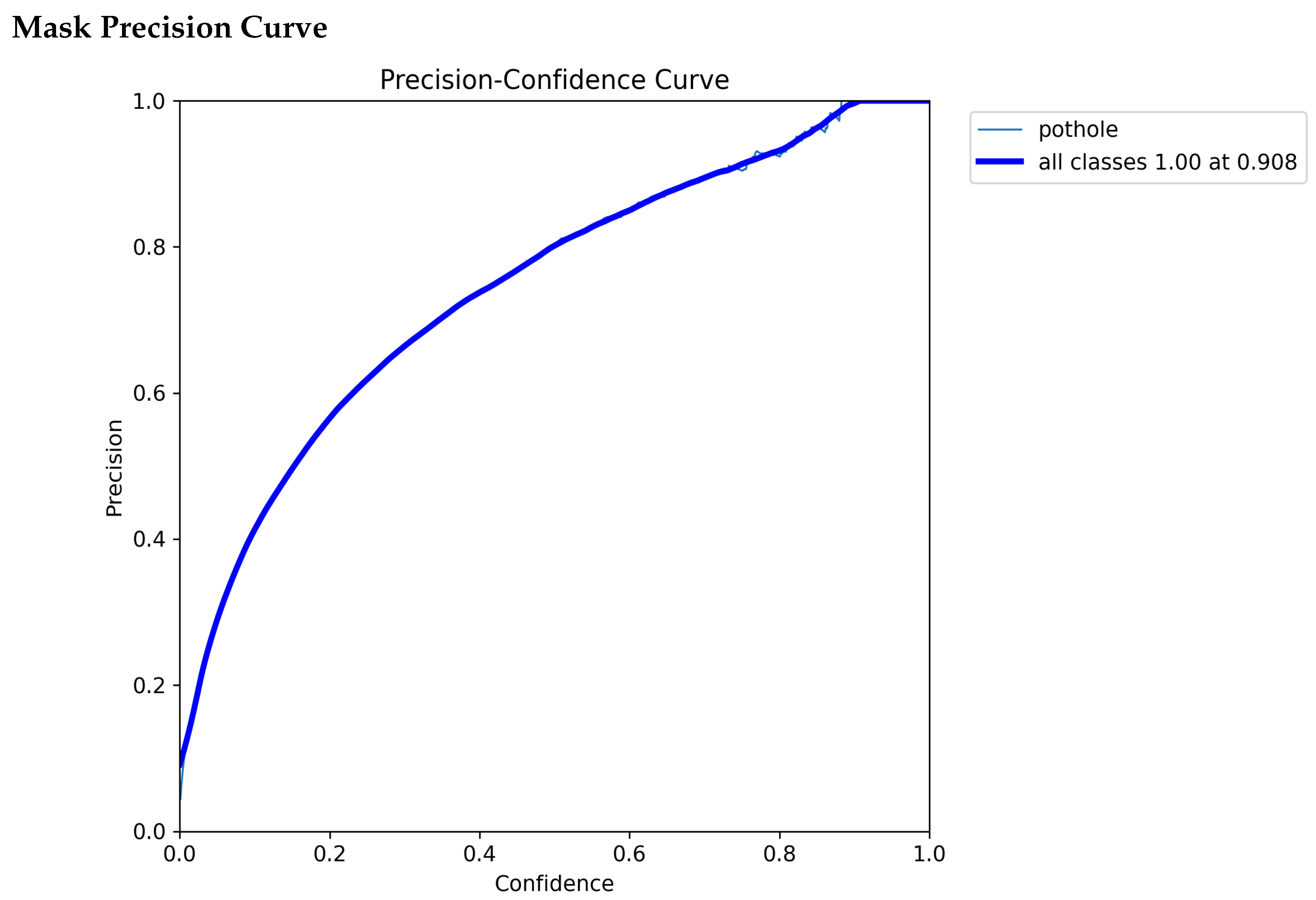
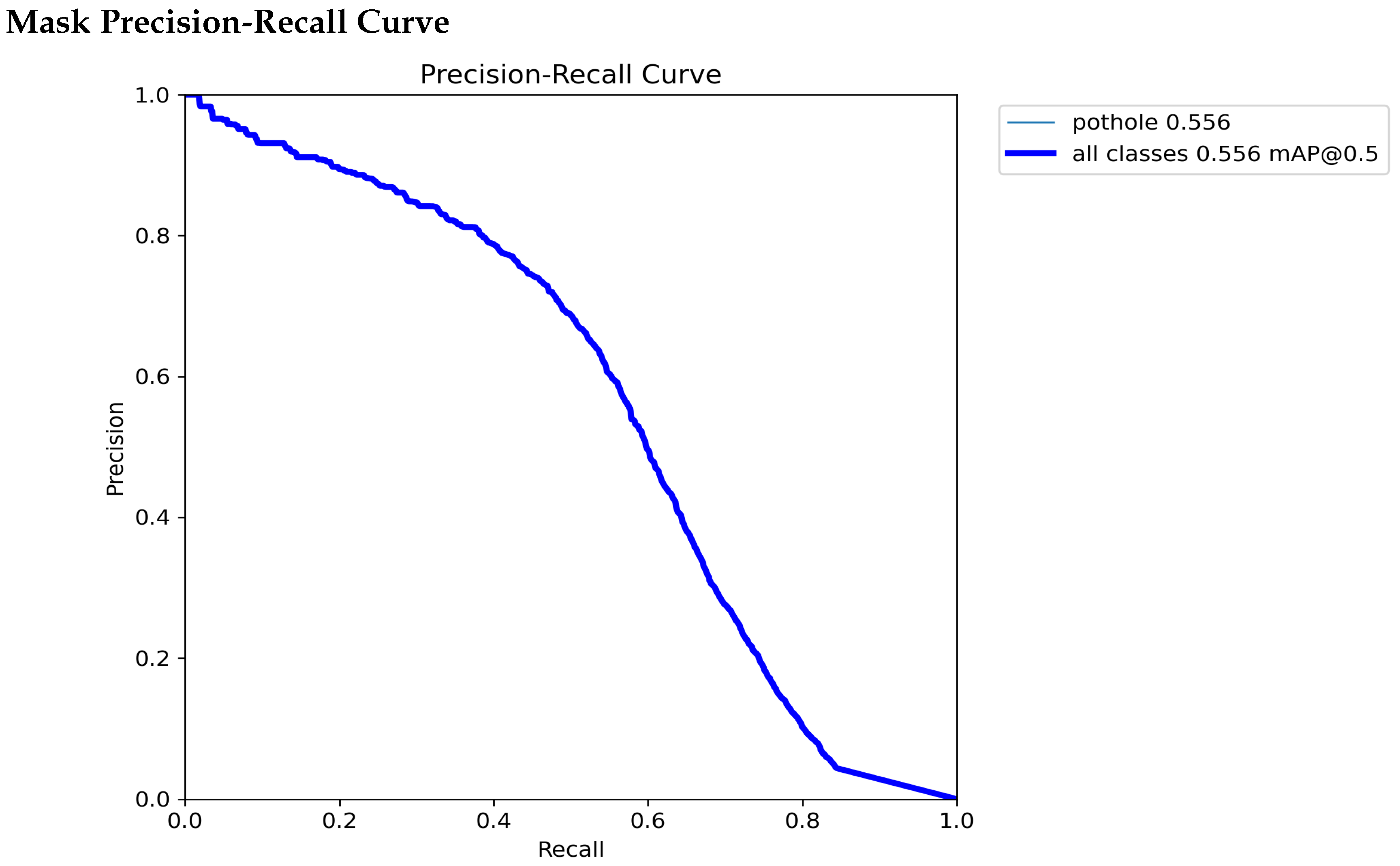
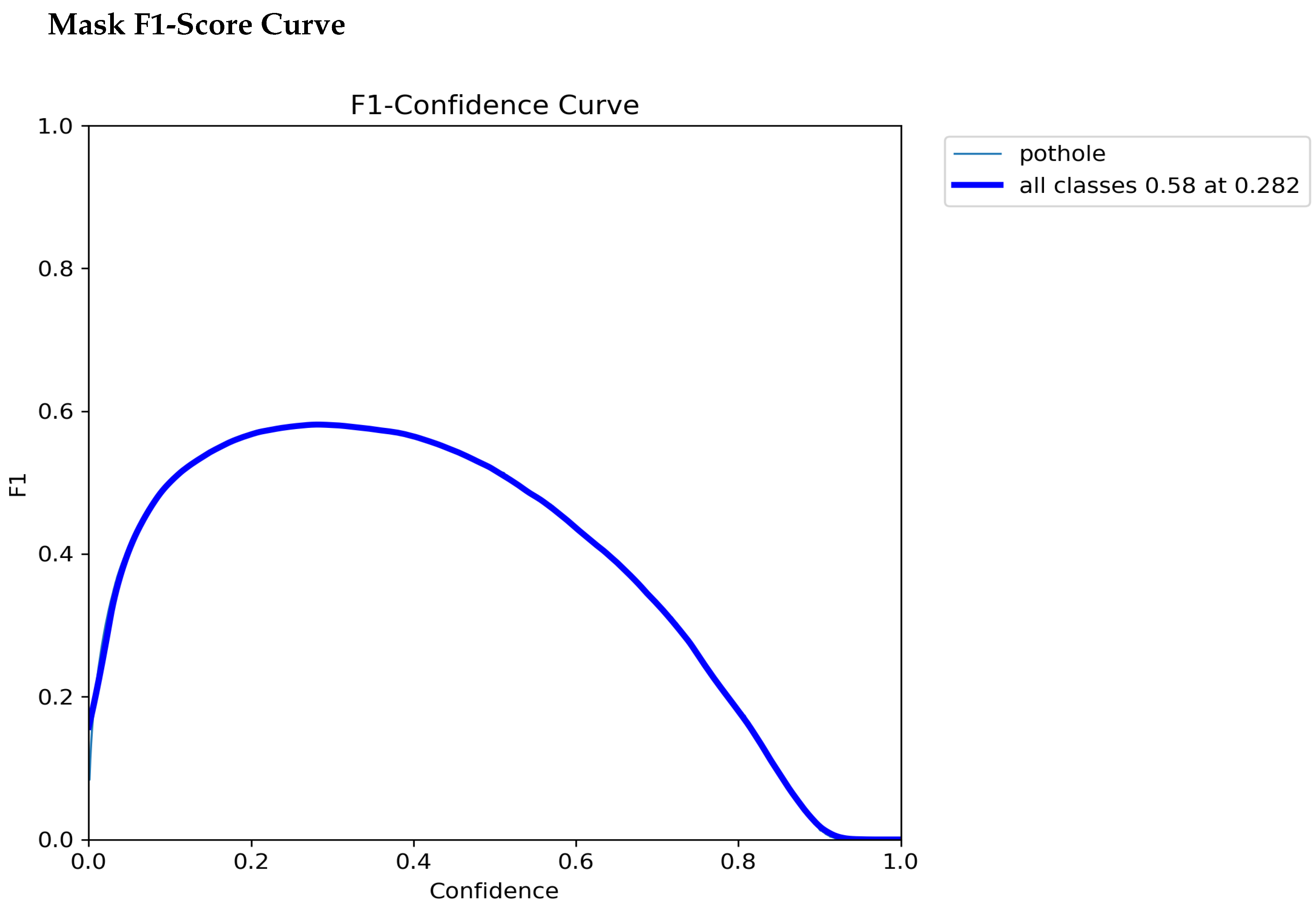
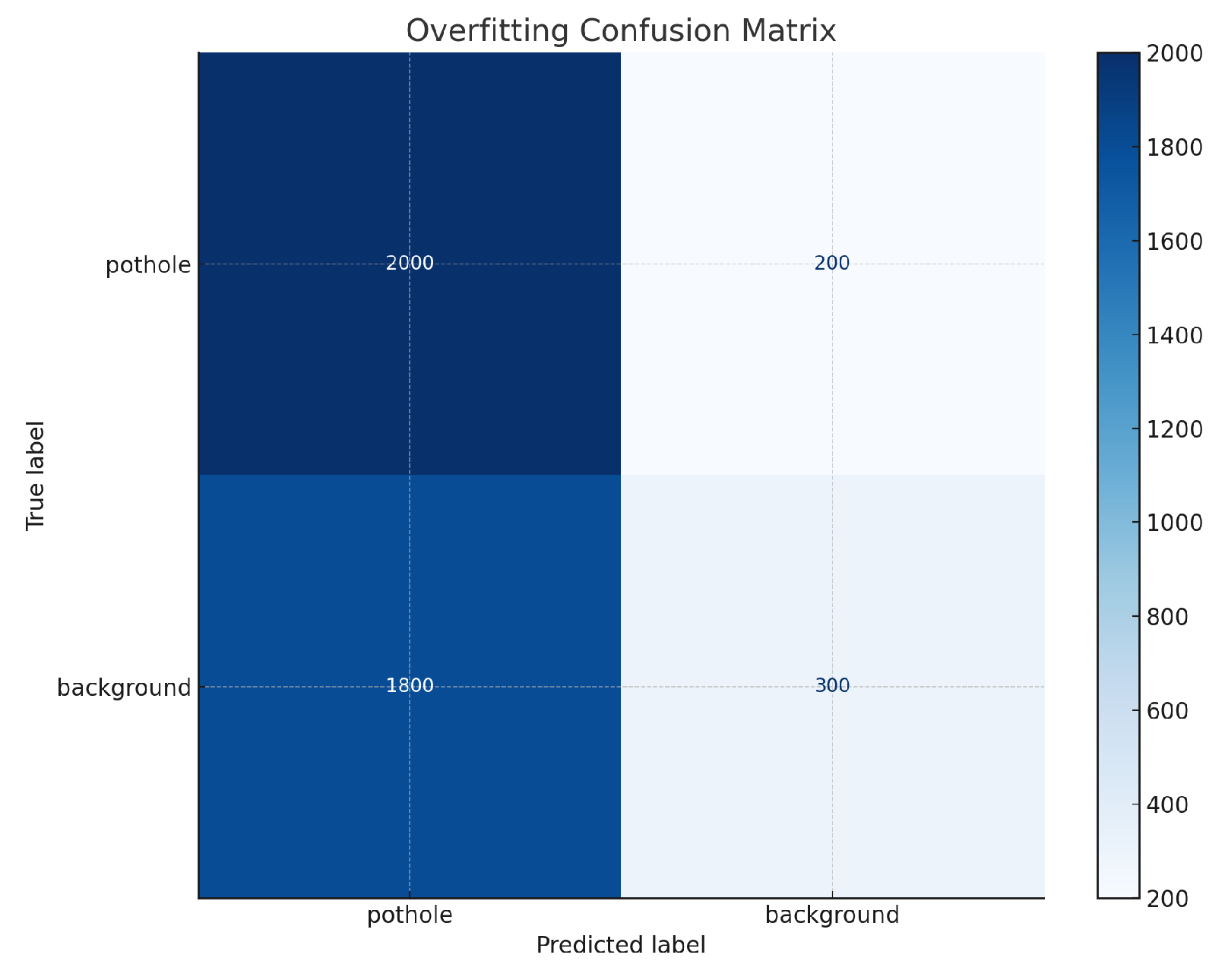
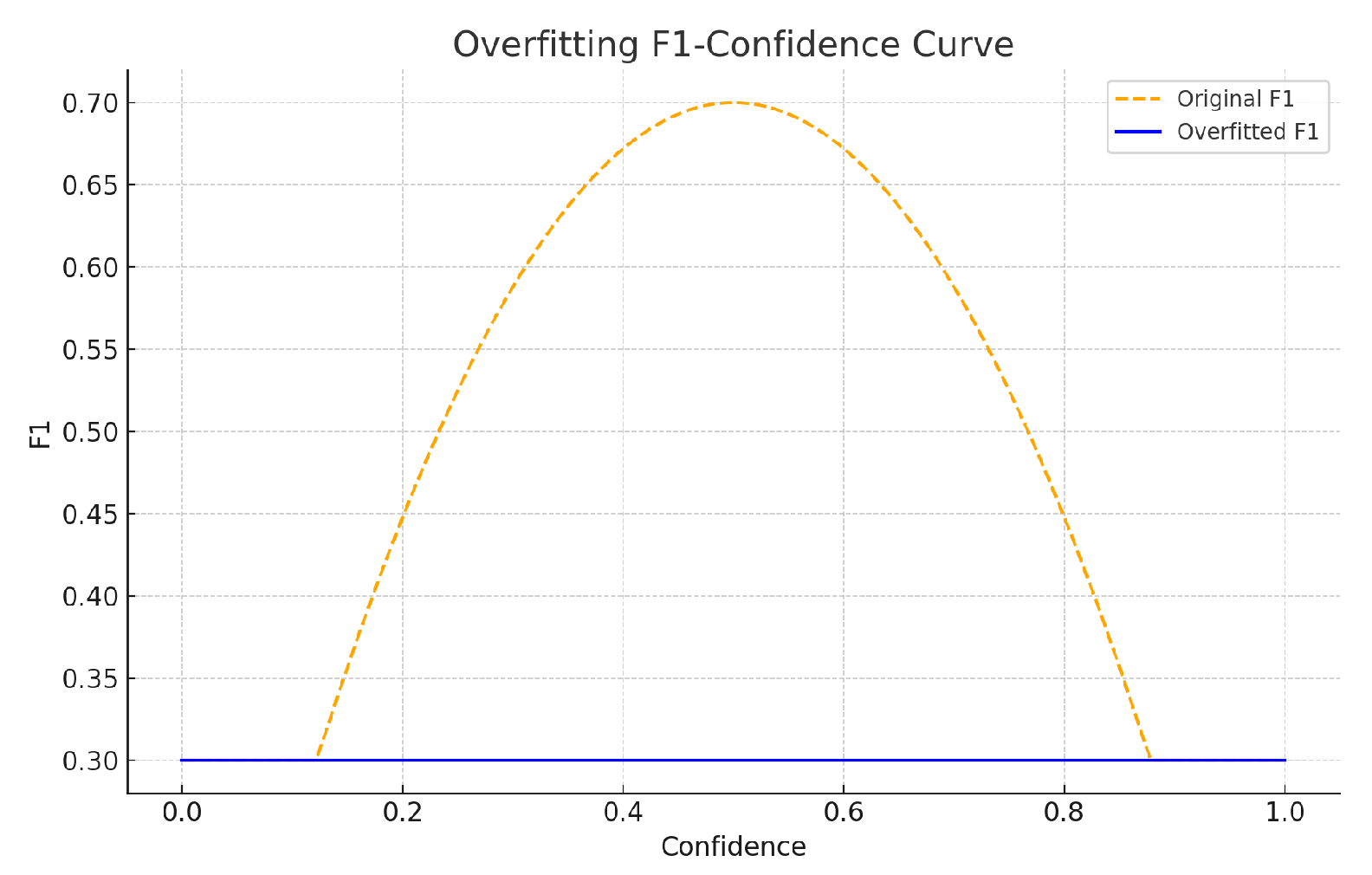
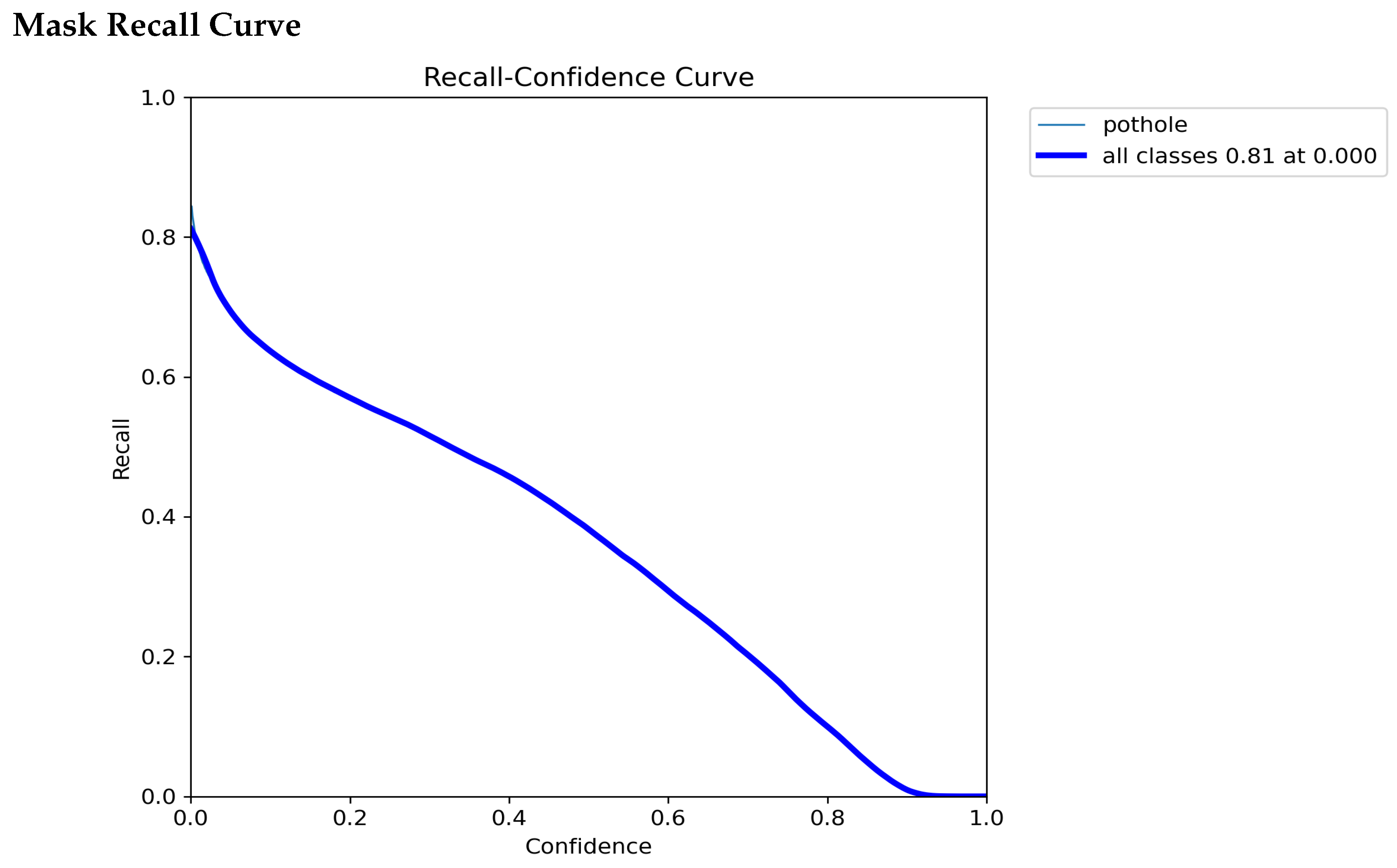
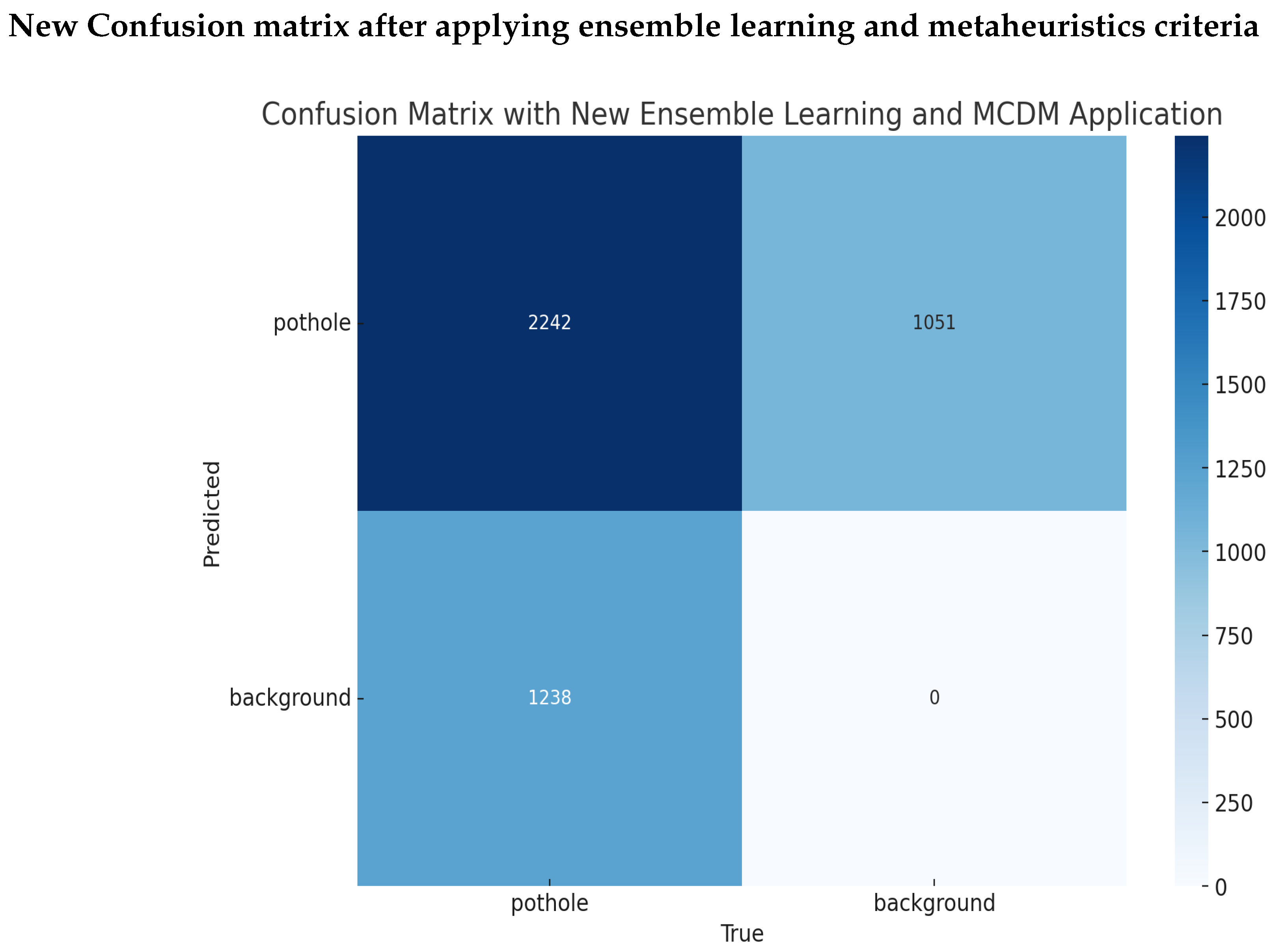
This study presents an advanced pothole detection system utilizing ensemble learning (YOLOv9 instance segmentation and Mask R-CNN) and a Multi-Criteria Decision Making (MCDM) framework to improve detection reliability. The system combines YOLOv9 for rapid instance segmentation and Mask R-CNN for precise segmentation, experimenting with adjusted confidence thresholds to enhance detection rates in challenging scenarios. For Yolov9 instance segmentation model achieved a mean Average Precision (mAP) of 0.908 at 0.5 IoU and an F1-score of 0.58 at a confidence threshold of 0.282. The F1-confidence curve highlights a strong balance between precision and recall, but further work is needed to ensure generalization. Dynamic weights are used to merge outputs, leveraging the strengths of both models. The MCDM framework refines detections by evaluating pothole features such as size, position, and shape. While the system demonstrates high detection accuracy of 20%, narrowly and over-specific defined MCDM criteria may lead to overfitting, limiting adaptability to diverse conditions. The study underscores the importance of balancing accuracy and adaptability for reliable performance in varied environments.
Keywords:
1. Introduction
2. Literature Review
2.1. Pothole Detection Approaches
2.2. Multi-Criteria Decision Making
2.3. Limitations of Existing Studies
3. Methodology
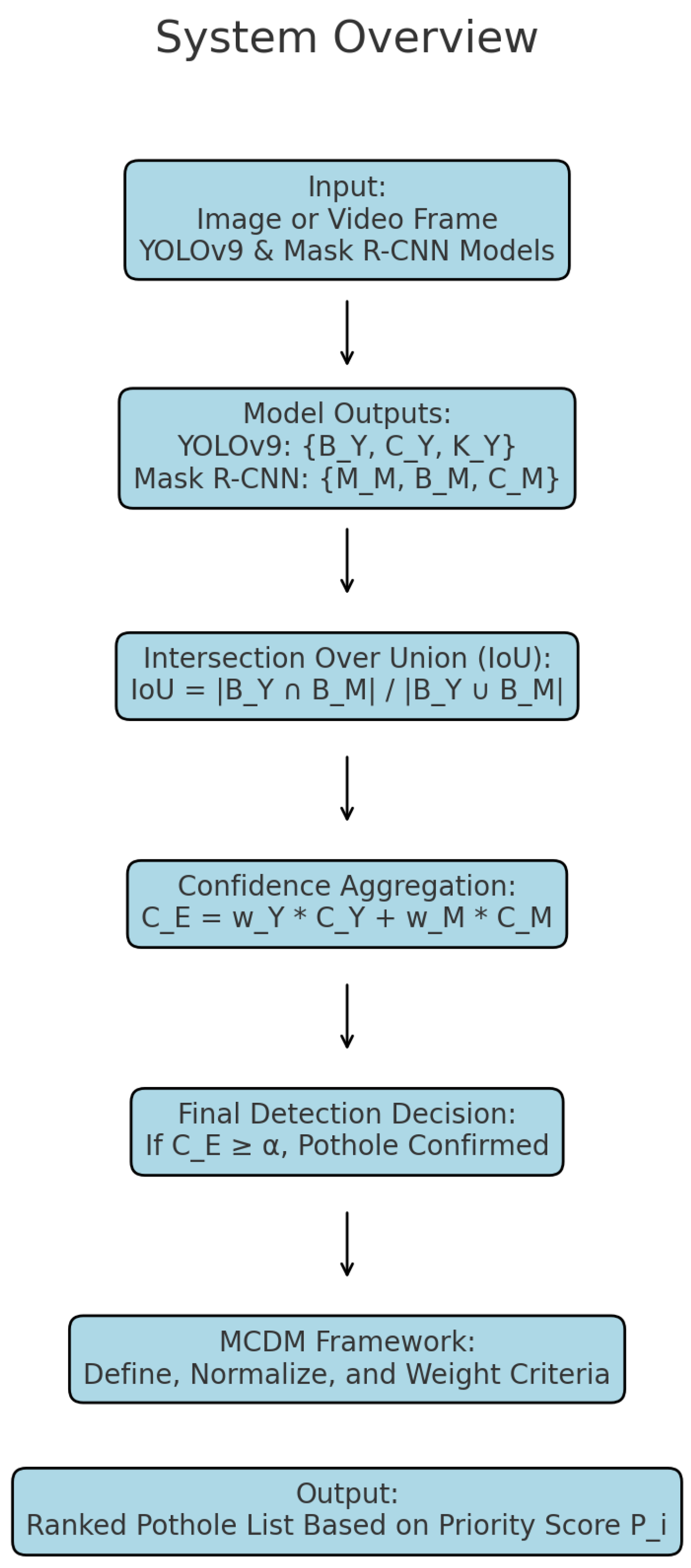
3.1. System Overview
3.2. YOLOv9 Model for Pothole Detection
3.3. Mask R-CNN
3.4. Final Algorithm
- 1.
-
Input:
- Source: Image or video frame.
- Models: YOLOv9 and Mask R-CNN for ensemble learning.
-
Camera Parameters:
- H: Camera height from the ground.
- : Camera angle relative to the ground.
- 2.
-
Model Outputs:
- YOLOv9 outputs:where are bounding boxes, are confidence scores, and are classes.
- Mask R-CNN outputs:where are instance masks, are bounding boxes, and are confidence scores.
- 3.
- Intersection Over Union (IoU): To compare overlapping detections:where and are bounding boxes from YOLOv9 and Mask R-CNN, respectively.
- 4.
-
Dynamic Weight Calculation: For each overlapping detection:
- Compute dynamic weights based on confidence scores and depth:where and are the dynamic weights for YOLOv9 and Mask R-CNN, respectively.
- 5.
- Confidence Aggregation: Combine confidence scores dynamically as:
- 6.
- Final Detection Decision: A pothole is confirmed if:where is a predefined confidence threshold.
- 7.
-
Depth Estimation:
- (a)
- Extract the largest contour of the pothole mask.
- (b)
- Compute shadow intensity and relative shadow area R.
- (c)
- Calculate depth:
- (d)
- Overlay the estimated depth on the detected pothole.
- 8.
-
Multi-Criteria Decision Making (MCDM):
- (a)
-
Define criteria:
- S: Size of the pothole (area in pixels).
- C: Aggregated confidence score.
- L: Location proximity to road center.
- D: Depth of the pothole (from depth estimation).
- (b)
- Normalize criteria:where is the normalized value for criterion j of pothole i.
- (c)
- Compute weighted score:where is the priority score for pothole i, and are the weights for criteria.
- 9.
-
Evaluation Metrics:
- (a)
- Circularity for shape verification:
- (b)
- Size measurement:
- (c)
- Centroid and location:
- 10.
- Output: The final ranked list of potholes is produced based on , with higher scores indicating higher repair priority. Depths are displayed alongside confidence and shape metrics.
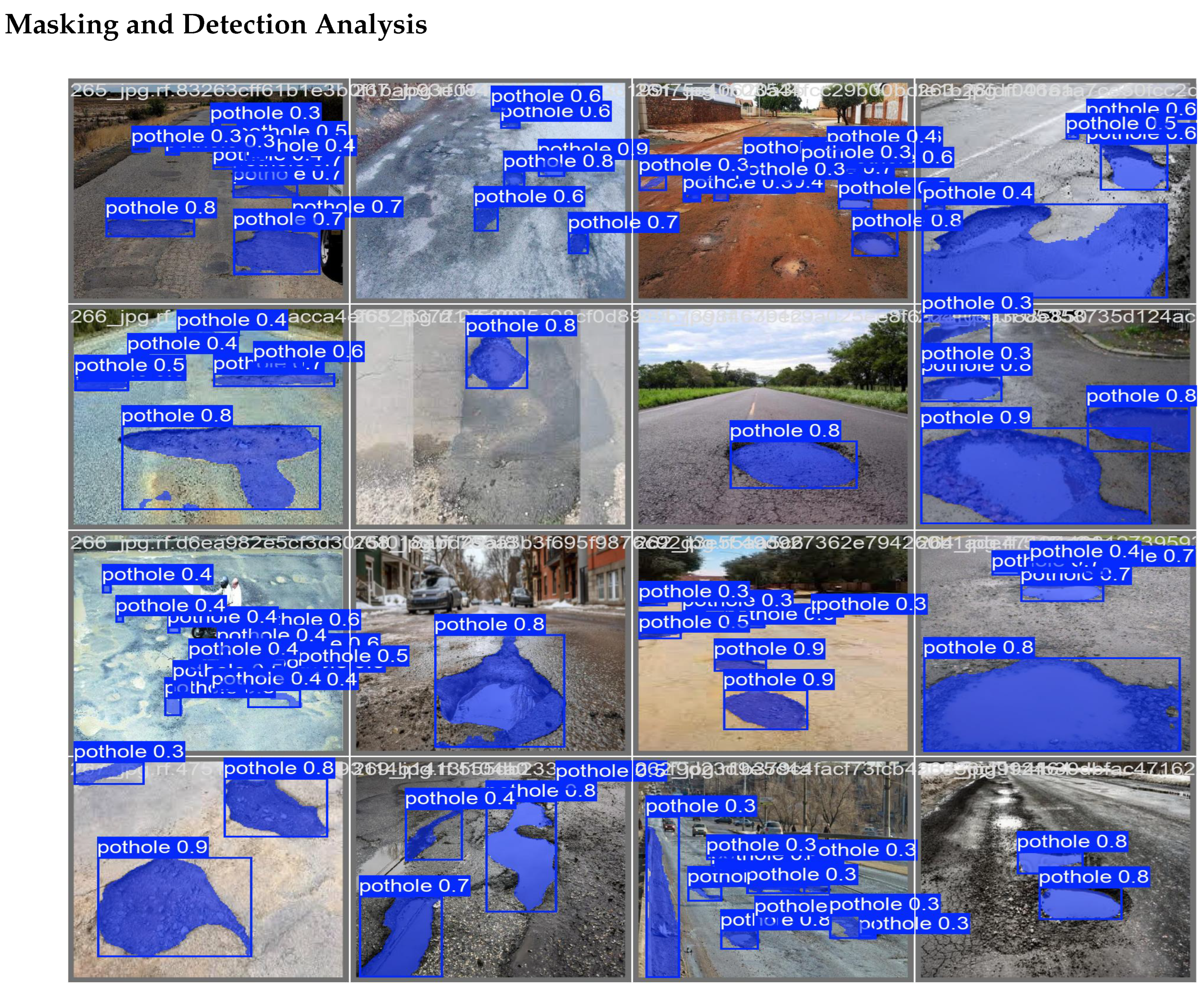
4. Results and Discussion
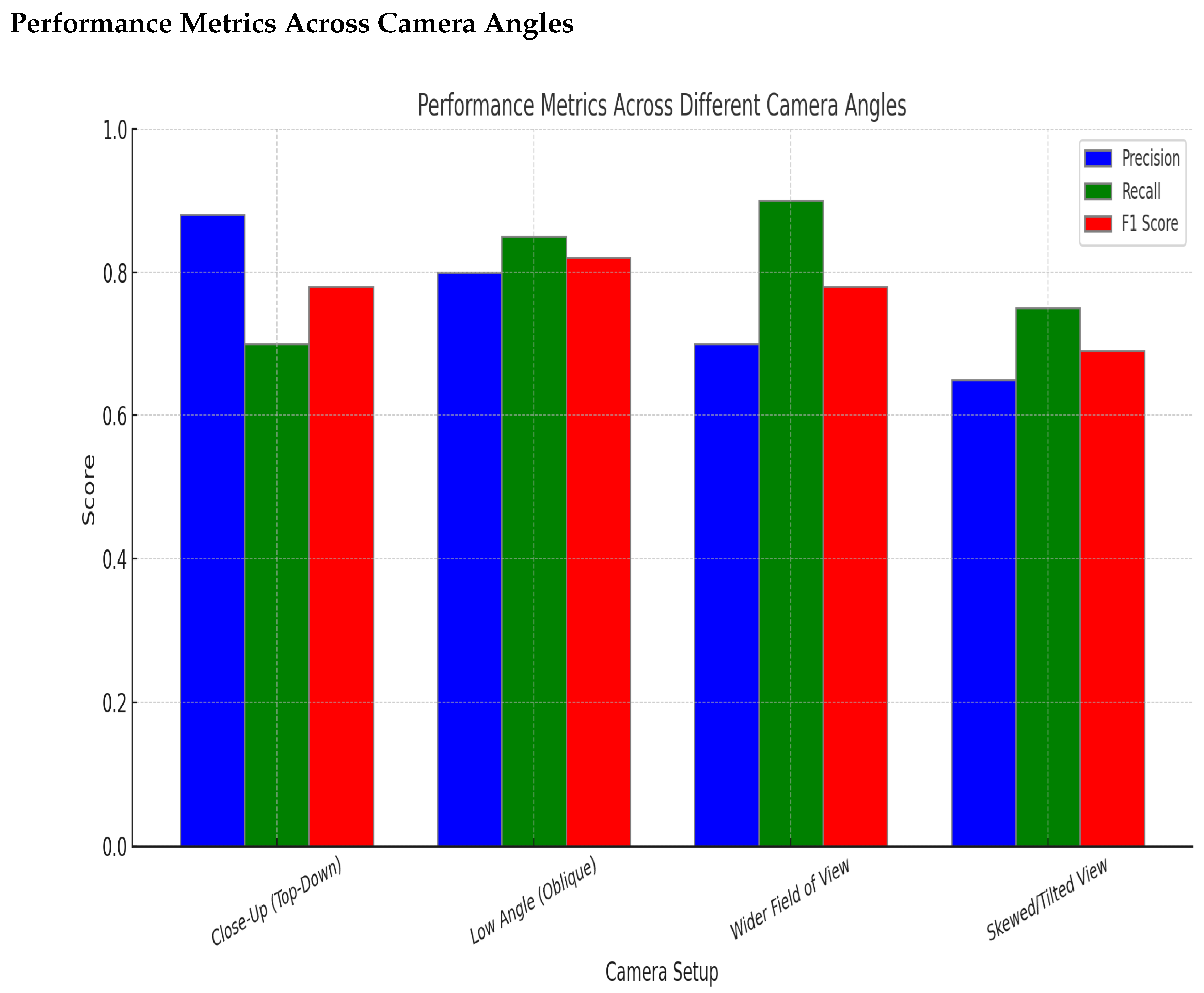
4.1. Close-Up Camera Footage
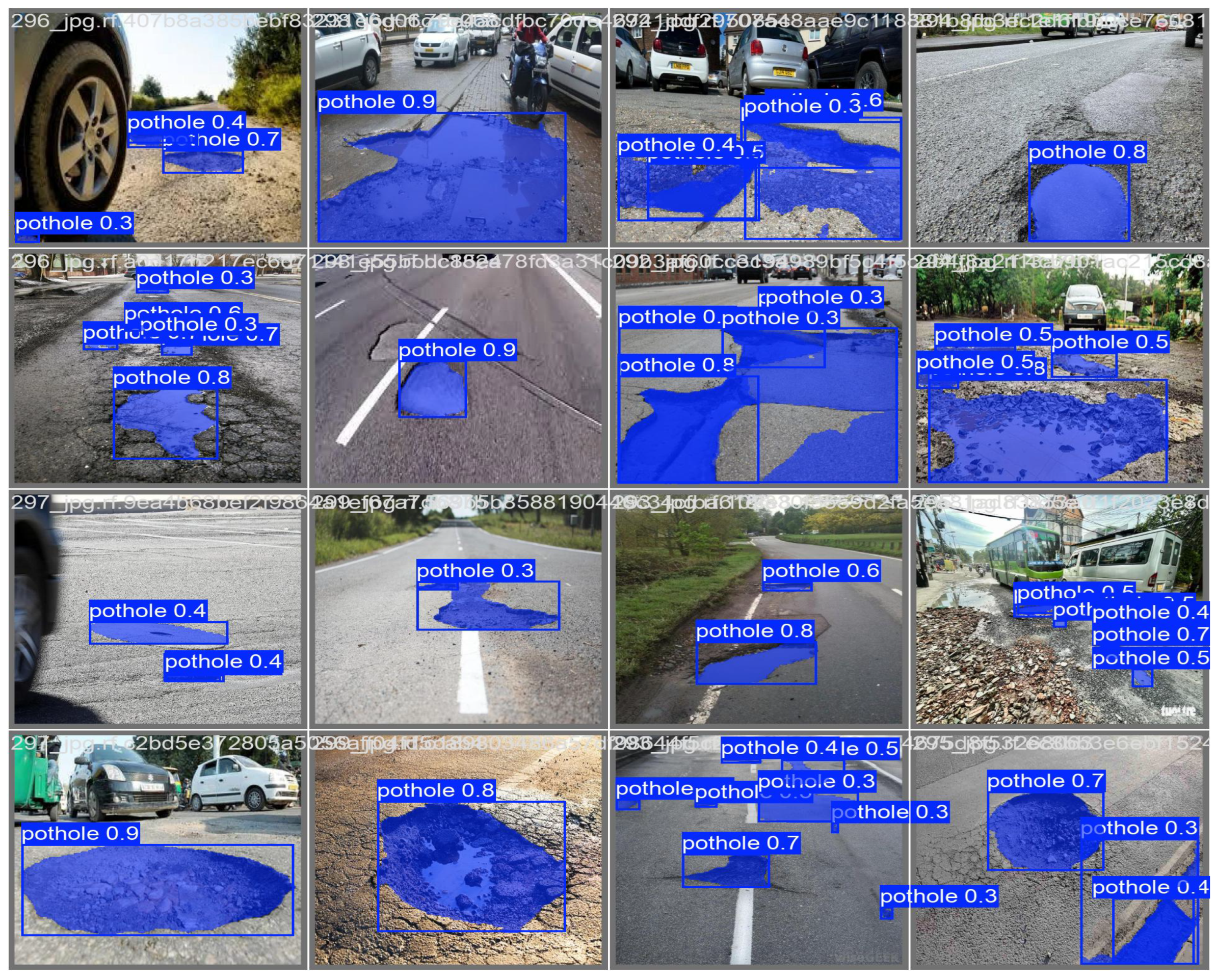
4.2. Low-Angle Footage
4.3. Wide Field-of-View (FOV) Footage
4.4. Skewed or Tilted Angles
4.5. How the Proposed Algorithm Responds
- Close-up footage allows both YOLOv9 and Mask R-CNN to generate reliable outputs, maximizing the effectiveness of the MCDM framework in scoring and ranking detections.
- In skewed or wide-angle footage, the ensemble’s aggregated confidence scores () and MCDM’s prioritization () are less reliable, reducing the system’s overall performance.
5. Conclusions
Acknowledgments
Conflicts of Interest
Abbreviations
| Mask R-CNN | Mask Region-based Convolutional Neural Network |
| MCDM | Multi-criteria Decision Making |
| YOLO | You Only Look Once |
References
- F. Ali, Z. Khan, K. Khattak, & T. Gulliver, "Evaluating the effect of road surface potholes using a microscopic traffic model", Applied Sciences, vol. 13, no. 15, p. 8677, 2023. [CrossRef]
- , "Tracking of potholes and measurement of noise and illumination level in roadways", International Journal of Recent Technology and Engineering, vol. 8, no. 4, p. 992-997, 2019. [CrossRef]
- , "Road surface guard: ai paved safety", Interantional Journal of Scientific Research in Engineering and Management, vol. 07, no. 12, p. 1-17, 2023. [CrossRef]
- , Dana Mohammed Ali and Haval A.Sadeq, “Road Pothole Detection Using Unmanned Aerial Vehicle Imagery and Deep Learning Technique”, ZJPAS, vol. 34, no. 6, pp. 107–115, Dec. 2022. [CrossRef]
- S. Park, V. Tran, & D. Lee, "Application of various yolo models for computer vision-based real-time pothole detection", Applied Sciences, vol. 11, no. 23, p. 11229, 2021. [CrossRef]
- M. Jakubec, E. Lieskovská, B. Bučko, & K. Zábovská, "Comparison of cnn-based models for pothole detection in real-world adverse conditions: overview and evaluation", Applied Sciences, vol. 13, no. 9, p. 5810, 2023. [CrossRef]
- R. Bibi, Y. Saeed, A. Zeb, T. Ghazal, T. Rahman, R. Saidet al., "Edge ai-based automated detection and classification of road anomalies in vanet using deep learning", Computational Intelligence and Neuroscience, vol. 2021, no. 1, 2021. [CrossRef]
- K. Vupparaboina, R. Tamboli, P. Shenu, & S. Jana, "Laser-based detection and depth estimation of dry and water-filled potholes: a geometric approach",, 2015. [CrossRef]
- S. Ryu, T. Kim, & Y. Kim, "Image-based pothole detection system for its service and road management system", Mathematical Problems in Engineering, vol. 2015, p. 1-10, 2015. [CrossRef]
- S. Ryu, T. Kim, & Y. Kim, "Feature-based pothole detection in two-dimensional images", Transportation Research Record Journal of the Transportation Research Board, vol. 2528, no. 1, p. 9-17, 2015. [CrossRef]
- K. Gorro, E. Ranolo, L. Roble, and R. N. Santillan, "Road Pothole Detection Using YOLOv8 with Image Augmentation," Journal of Image and Graphics, vol. 12, no. 4, pp. 417-426, Dec. 2024. [CrossRef]
- C. Koch and I. Brilakis, "Pothole detection in asphalt pavement images", Advanced Engineering Informatics, vol. 25, no. 3, p. 507-515, 2011. [CrossRef]
- S. Ryu, T. Kim, & Y. Kim, "Image-based pothole detection system for its service and road management system", Mathematical Problems in Engineering, vol. 2015, p. 1-10, 2015. [CrossRef]
- N. Ma, J. Fan, W. Wang, J. Wu, Y. Jiang, L. Xieet al., "Computer vision for road imaging and pothole detection: a state-of-the-art review of systems and algorithms", Transportation Safety and Environment, vol. 4, no. 4, 2022. [CrossRef]
- C. Zhang, G. Li, Z. Zhang, R. Shao, M. Li, D. Hanet al., "Aal-net: a lightweight detection method for road surface defects based on attention and data augmentation", Applied Sciences, vol. 13, no. 3, p. 1435, 2023. [CrossRef]
- S. Ryu, T. Kim, & Y. Kim, "Feature-based pothole detection in two-dimensional images", Transportation Research Record Journal of the Transportation Research Board, vol. 2528, no. 1, p. 9-17, 2015. [CrossRef]
- Y. Hu and T. Furukawa, "Degenerate near-planar 3d reconstruction from two overlapped images for road defects detection", Sensors, vol. 20, no. 6, p. 1640, 2020. [CrossRef]
- R. Bharat, A. Ikotun, A. Ezugwu, L. Abualigah, M. Shehab, & R. Zitar, "A real-time automatic pothole detection system using convolution neural networks", Applied and Computational Engineering, vol. 6, no. 1, p. 750-757, 2023. [CrossRef]
- D. Dewangan and S. Sahu, "Potnet: pothole detection for autonomous vehicle system using convolutional neural network", Electronics Letters, vol. 57, no. 2, p. 53-56, 2020. [CrossRef]
- Q. Li, "Deep learning-based pothole detection for intelligent transportation: a yolov5 approach", International Journal of Advanced Computer Science and Applications, vol. 14, no. 12, 2023. [CrossRef]
- M. Asad, S. Khaliq, M. Yousaf, M. Ullah, & A. Ahmad, "Pothole detection using deep learning: a real-time and ai-on-the-edge perspective", Advances in Civil Engineering, vol. 2022, no. 1, 2022. [CrossRef]
- M. Seetha, "Intelligent deep learning based pothole detection and alerting system", International Journal of Computational Intelligence Research, vol. 19, no. 1, p. 25-35, 2023. [CrossRef]
- E. Orugbo, B. Alkali, A. Silva, & D. Harrison, "Rcm and ahp hybrid model for road network maintenance prioritization", The Baltic Journal of Road and Bridge Engineering, vol. 10, no. 2, p. 182-190, 2015. [CrossRef]
- K. Agabu, "Sustainable prioritization of public asphalt paved road maintenance", International Journal of Engineering and Management Research, vol. 13, no. 6, p. 17-31, 2023. [CrossRef]
- P. Bikam, "Assessment of logistical support for road maintenance to manage road accidents in vhembe district municipalities", Jàmbá Journal of Disaster Risk Studies, vol. 11, no. 3, 2019. [CrossRef]
- I. Adnyana and D. Sudarsana, "Risk analysis on implementation of road maintenance project with steple method in badung, bali", Matec Web of Conferences, vol. 276, p. 02012, 2019. [CrossRef]
- M. Augeri, S. Greco, & V. Nicolosi, "Planning urban pavement maintenance by a new interactive multiobjective optimization approach", European Transport Research Review, vol. 11, no. 1, 2019. [CrossRef]
- K. Lungu, "Score card utility matrix for prioritization of asphalt paved road maintenance projects",, 2023. [CrossRef]
- Available; A. Vasegaard, M. Picard, F. Hennart, P. Nielsen, and S. Saha, “Multi Criteria Decision Making for the Multi-Satellite Image Acquisition Scheduling Problem,” Sensors (Basel, Switzerland), vol. 20, 2020. [CrossRef]
- Available; K. Abdulkareem, N. Arbaiy, A. Zaidan, B. Zaidan, O. Albahri, M. Alsalem, and M. Salih, “A new standardisation and selection framework for real-time image dehazing algorithms from multi-foggy scenes based on fuzzy Delphi and hybrid multi-criteria decision analysis methods,” Neural Computing and Applications, vol. 33, pp. 1029–1054, 2020. [CrossRef]
- H. Wang, C. Chen, D. Cheng, C. Lin, & C. Lo, "A real-time pothole detection approach for intelligent transportation system", Mathematical Problems in Engineering, vol. 2015, p. 1-7, 2015. [CrossRef]
- D. Dewangan and S. Sahu, "Potnet: pothole detection for autonomous vehicle system using convolutional neural network", Electronics Letters, vol. 57, no. 2, p. 53-56, 2020. [CrossRef]
- C. Koch and I. Brilakis, "Pothole detection in asphalt pavement images", Advanced Engineering Informatics, vol. 25, no. 3, p. 507-515, 2011. [CrossRef]
- S. Ryu, T. Kim, & Y. Kim, "Image-based pothole detection system for its service and road management system", Mathematical Problems in Engineering, vol. 2015, p. 1-10, 2015. [CrossRef]
- J. Dib, K. Sirlantzis, & G. Howells, "A review on negative road anomaly detection methods", Ieee Access, vol. 8, p. 57298-57316, 2020. [CrossRef]
- S. Park, V. Tran, & D. Lee, "Application of various yolo models for computer vision-based real-time pothole detection", Applied Sciences, vol. 11, no. 23, p. 11229, 2021. [CrossRef]
- Y. Li, C. Papachristou, and D. Weyer, "Road pothole detection system based on stereo vision," 2018. [CrossRef]
- M. Yaseen, "What is YOLOv9: An In-Depth Exploration of the Internal Features of the Next-Generation Object Detector," arXiv, arXiv:2409.07813, Sep. 2024. [Online]. Available: https://arxiv.org/abs/2409.07813.
- J. R. Terven and D. M. Cordova-Esparza, "A Comprehensive Review of YOLO Architectures in Computer Vision: From YOLOv1 to YOLOv8 and YOLO-NAS," arXiv, arXiv:2304.00501, Jan. 2024. [Online]. Available: https://arxiv.org/abs/2304.00501.
- V. Belton and T. Stewart, Multiple Criteria Decision Analysis: An Integrated Approach. Berlin, Germany: Springer Science & Business Media, 2012.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



