
Submitted:
25 July 2024
Posted:
26 July 2024
You are already at the latest version
Abstract
The goal is the optimal synthesis of the parameters of the control law for a nonlinear satellite attitude control system under constraints related to the saturation effect of reaction wheels. The maximum stability degree of the control system is considered as a criterion for the optimality of the parameters of the control law, and the absolute values of the control torques and angular velocities of the reaction wheels, achievable within the limits of the physical characteristics of the drives, are considered as constraints. The solution to the optimal synthesis problem is based on the transformation of the nonlinear control system model into a linear model, within the framework of the problem of global asymptotic stability of the control system is also guaranteed. The problem is decomposed into a subproblems of obtaining the optimal transient process shape in the control system and considering the constraints. A method of synthesizing the optimal transient process shape based on the criterion of maximum stability degree had been developed. An analytical method of determining the optimal values of the control law parameters, based on decomposing the normalized characteristic polynomial in the linear model into three identical factors had been proposed. A method with regards to the constraints of the control torque and angular speed of the reaction wheels, based on transitioning from relative to real time is developed. An algorithm for calculation of the transition scale from relative to real time, ensuring the fulfillment of all constraints in the optimal synthesis problem, is proposed. An example demonstrating the efficiency and simplicity of the proposed methods and algorithm for targeted selection of technical characteristics of the control system, considering the maximum absolute values of angular speeds and control torques of the reaction wheels, is provided.
Keywords:
satellite
; attitude control system
; dynamics
; linear model
; parameter synthesis
1. Introduction
For optimal synthesis of satellite attitude control systems (SACS), which dynamics described by nonlinear differential equations, engineering practice widely uses methods based on linear models obtained by linearizing the dynamics equations or by transforming the dynamics equations into a linear form [1,2,3,4,5,6,7,8,9,10]. Methods of optimal synthesis of nonlinear controllers using linear models include the feedback linearization and the State-Dependent Algebraic Riccati Equation (SDARE) methods, which leads to the search of the controller that converts the original system of nonlinear equations into a system of linear equations [1,2,3], the State-Dependent Riccati Equation (SDRE) method, based on non-stationary Riccati equations, which solution is determined at each moment in time[4,6,7,8] , the optimal control method [5,9], and the pole placement method using H∞ and H2 norms [10].
The criteria for optimal synthesis include integral criteria for minimizing the mean-square error, criteria of minimizing energy expenditure on control and time for transitioning from the initial orientation to the final one. Additional synthesis conditions include the simplicity and low labor intensity of the synthesis method, the ability to account for maximum control torques produced by reaction wheels, and their maximum angular velocities. These indicators are important for minimizing the electrical energy expenditure on satellite orientation control.
Paper [1] studies the problem of the fastest possible reorientation of a rigid spacecraft in the scope of physical capabilities of the drives. Specifically, it introduces a control logic with nonlinear feedback which bring together the drive and sensor saturation limits. The problem of reorienting a satellite around its axis in nearly minimum time is being solved. The Timing Explorer spacecraft is used as an example to demonstrate the effectiveness and simplicity of the proposed nonlinear feedback control logic under constraints on the rate of rise and control torque.
Paper [2] investigates the control of the satellite attitude for a nonlinear system with multiple inputs and outputs. The physical model of the satellite uses three reaction wheels as the control device. The task of the control system is to change the speed of the reaction wheels to direct the satellite to the desired course. The quantitative feedback theory is applied to synthesize a set of linear controllers dealing with nonlinearities in the equations. [3] develops a nonlinear control law based on feedback linearization for reaction wheels with a linear part in the form of a linear-quadratic regulator. The optimal torque of each reaction wheel is determined based on the configuration distribution matrix and torque magnitude optimization.
Papers [4,6,8] studies the application of the SDRE control method, based on the state-dependent Riccati equation. Simulation results show that the SDRE control method is more efficient than linear regulators in large satellite control maneuvers. [5] presents a suboptimal real-time control algorithm for spacecraft maneuvering, based on the state-dependent SDARE method and real-time linearization of the motion equations. The control strategy is not optimal as the linear-quadratic regulator (LQR) gain coefficients are recalculated at each time sample. The cost function of the proposed controller was compared with the function which was obtained using general-purpose optimal control software and showed that, on average, control costs increase by about 15 %.
Paper [7] reviews a satellite attitude and orbit control system, which can be successfully designed based on linear control theory if the satellite has slow angular movements and small attitude maneuvers. However, in large and fast maneuvers, linearized models cannot capture all disturbances due to the influence of nonlinear terms present in the dynamics and actuators (e.g., saturation). The SDRE method transforms the nonlinear system into a (non-unique) linear structure with state-dependent coefficient matrices and then minimizes a nonlinear performance index with a quadratic structure.
Paper [8] proposes the method based on a state-dependent Riccati equation. This method transforms the differential Riccati equation into a linear Lyapunov differential equation. This method can be applied to problems related to nonlinear regulation and finite-horizon tracking.
Paper [9] presents an optimal reorientation maneuver controller with saturation constraints for control and kinetic moments of reaction wheels. The proposed control scheme consists of two parts. The first part is an open-loop reorientation trajectory with time-minimum. The dynamics of the actuator, control and kinetic moment saturation are considered, while building an optimal open-loop trajectory without feedback. The second part is a control law for tracking the optimized reference trajectory based on error dynamics and reaction wheel dynamics.
Paper [10] proposes a mixed output feedback controller for microsatellite attitude control with uncertainties in moment of inertia changes and external disturbances. The controller is designed based on a linear attitude dynamics model. The characteristics ensure robustness to moment of inertia uncertainties and disturbance rejection. The H2 characteristics help avoid unwanted reaction wheel saturation effects. Additionally, the roots of the system’s characteristic equation can be put in specific regions of the complex half-plane to achieve well-damped transient characteristics.
This paper presents the results of solving the problem of optimal synthesis of the control law parameters for a nonlinear SACS under constraints related to the saturation effect of reaction wheels, based on its linear model described in [11]. The engineering requirements for the developed solution method include simplicity and low labor intensity, the ability to account for maximum control (torque) moments produced by reaction wheels, and their maximum angular speeds. The developed solution method ensures global asymptotic stability of the system along with parameter optimization and required control quality indicators. The criterion for the optimal control law parameters is the maximum stability degree of the SACS, and the constraints are the maximum control moments and angular speeds of the reaction wheels, achievable within the physical capabilities of the drives.
2. Linear Form of the Mathematical Model of the Nonlinear Satellite Attitude Control System
The mathematical model of the nonlinear SACS in linear form was obtained by the authors in [11]. While constructing the mathematical model, the satellite and reaction wheels are considered as a single closed mechanical system, whose total kinetic moment is defined as
where and are the vectors of the kinetic moments of the satellite and reaction wheels, respectively; and are the angular velocities of the satellite and reaction wheels, respectively; and are diagonal (3x3) matrices of the inertia tensors of the satellite and reaction wheels, respectively (all parameters are expressed in the body-fixed coordinate system). We assume that the moments of external forces are close to zero and the control torques of the reaction wheels in the body-fixed coordinate system are .
The system dynamics are described using the standard form equations [12]:
where the vector product operator is
The kinematics are described using quaternion equations [1]:
where .
A linear control law corresponding to a PD regulator is used:
where and are arbitrary (3x3) matrices with unknown parameters of the control law. The complete nonlinear system of SACS motion equations in normal Cauchy form:
The authors in [11] have shown that the nonlinear system of motion equations (6) can be transformed into a system of linear differential equations with time-varying parameters of the following form:
where
– the total kinetic moment of the closed mechanical system in the inertial coordinate system, which is constant according to the theorem of conservation of kinetic moment [13];
- the total kinetic moment of the closed mechanical system in the body-fixed coordinate system.
3. Analysis of the stability and quality of control processes
The authors in [11] proved the following statement: it is necessary and sufficient for nonlinear system in Equation (6) to be asymptotically stable if it meets the requirement: the ultimate linear homogeneous system of differential equations with constant matrix elements must be asymptotically stable
and the following condition must be met:
According to [14], this statement leads to the important conclusion that the stability analysis and the quality of the control processes of the SACS, described by the nonlinear system of differential equations (6), can be carried out based on the analysis of the solutions of the linear system of differential equations with constant parameters (9) and, consequently, based on the analysis of the location of the roots of its characteristic equation:
The elements of matrix A depend on the elements of the matrices D and K of the control law (5) as well as on the initial values of the total angular momentum :
where are the maximum absolute value of the satellite’s angular momentum (1) at the initial moment of time.
In the special case when the initial conditions for the total angular momentum of the satellite and reaction wheels are zero, the linear system of equations (9) takes a truncated form:
where
The elements of the matrix depend solely on the D and K parameters of the control law (5), and the characteristic polynomial of the truncated system of differential equations (13) has the form:
where
The characteristic polynomial of the complete system of differential equations (9), the elements of matrix A of which also depend on the initial values of the satellite’s total angular momentum , has the form:
where
Thus, the stability and quality of the control processes of the SACS are determined both by the parameters of the control law and by the initial values of the satellite’s total angular momentum. Moreover, the authors of the [11] article proved that if the roots of the characteristic equation of the truncated linear system (13) are real, negative, and multiple, then the linear system with constant parameters (9) is asymptotically stable for any initial values of the satellite’s total angular momentum in inequalities (12).
4. Decomposition of the Tasks of Obtaining the Required Shape and Speed of the Transient Process
The coefficients of the characteristic polynomial (15) determine both the form and the speed of the transient process in the SACS. The relationships between the values of the polynomial coefficients and these control quality indicators are described by transcendental expressions, which do not allow obtaining analytical estimates of both the required form and the speed of the transient process simultaneously. The problem can be solved by decomposing it into two sub-tasks and sequentially solving the them: achieving the optimal form of the transient process in the first step and then achieving the required speed of its execution in the second step if we use the normalized characteristic equation of the control system [15]. We use the concept of the geometric mean root for this purpose:
where are the roots of the characteristic equation of the system (13):
Let us proceed in Equation (20) to a new complex value p by substituting . As a result, we obtain the normalized characteristic equation:
where are dimensionless coefficients that do not change within the time scale, i.e., they do not characterize the speed of the SACS, but only determine the form of its transient process. When returning to the original complex variable the original characteristic Equation (20) takes the form of:
The geometric mean root can serve as a measure of the speed of transient processes. The use of the normalized characteristic Equation (21) allows to build the transient process of the SACS in relative time . According to the theorem of time-scale compression, the process’s form remains unchanged with a change in the time scale [15]. In the first step this allows us to search for the control law parameters, to abstract from the speed requirements of the SACS and solve the problem of obtaining the required transient process form independently of the speed requirements. If the quality of the transient process meets the requirements of its form, the required speed of the transient process can be ensured by appropriately choosing the value of , i.e., by changing the time scale of the process.
5. Optimal Synthesis of the Form of the Transient Process
As a criterion for the optimality of the control law parameters, consider the maximum stability degree of the SACS. For a stable system, where all roots of the normalized characteristic equation have negative real parts, the stability degree of the SACS is defined as the absolute value of the real part of the root closest to the imaginary axis:
where are functions of the control law parameters. The maximum stability degree for the optimal system is defined as:
where are the optimal values of the control law parameters in the relative time . We consider maximum absolute values as constraints on the control torques and the angular velocities of the reaction wheels:
where are the highest values of the control torques and the angular velocities of the reaction wheels achievable within the physical characteristics of the actuators. It is known from [15], that the maximum stability degree of the SACS is achieved if the roots of the normalized characteristic Equation (21) are real, negative, and multiple: , i.e., the dimensionless coefficients of the normalized characteristic Equation (21) must be binomial and equal to:
It is possible to determine the optimal values of the control law parameters using the values of (26) for the coefficients of the normalized characteristic Equation (21), which correspond to the optimal form of the transient processes in the SACS in the relative time . To do this, it is necessary to solve a system of six nonlinear algebraic equations (16) with respect to the six unknown parameters of the control law , using the values of the coefficients of the normalized characteristic equation:
The system of six nonlinear algebraic equations with six unknowns (27) generally does not have an analytical solution and therefore is solved using iterative methods. A drawback of these methods is the dependence of the obtained solution on the choice of the initial approximation values of the unknowns, so obtaining an exact solution is not guaranteed.
6. Analytical Method for Determining the Optimal Values of the Parameters of the Control Law
It is possible to obtain an analytical solution of the system of equations (27) for the optimal values of the control law parameters, considering the properties of the matrix (14) of the truncated system (13). Indeed, from the form of the matrix , it follows that by permuting the rows, it can be transformed into a quasi-diagonal matrix:
Therefore, the normalized characteristic polynomial of the matrix can be represented as:
The factorization of the characteristic polynomial (15) of the truncated system (13) into three identical factors of the form (29) means that in the case of zero initial conditions for the total kinetic moment of the satellite and the reaction wheels, the rotational motions of the satellite around the three coordinate axes are independent of each other. This makes it possible to decompose the problem of synthesizing the parameters of the SACS into three subproblems of synthesizing second-order linear control systems with identical normalized characteristic equations of the form:
where . With multiple real, negative roots of the normalized characteristic Equation (21) the unknown coefficient of the characteristic Equation (30) is equal to . From this, the sought optimal values of the control law parameters, corresponding to the maximum stability degree of the SACS, are equal to:
These values of the control law parameters ensure the optimal shape of the transient process according to the criterion of the maximum stability degree in relative time . When returning to the previous complex variable s, i.e. when returning to real time t, the normalized characteristic Equation (30) takes the form:
Comparing the coefficients of the characteristic equations (30) and (32), it follows that the sought optimal values of the control law parameters, corresponding to the maximum stability degree (24) of the SACS in real time t, should be equal to:
7. Consideration of Constraints on Control Torques and Angular Velocities of Reaction Wheels
Based on the optimal values of the control law parameters (31), we can construct the transient process and determine the highest values of the control moments and angular velocities of the reaction wheels and in relative time . The constraints on the highest values of the control moments and angular velocities of the reaction wheels (25) during the transient process must be met in real time. Therefore, it is necessary to determine the relationships between the angular accelerations, control moments and , and the angular velocities and of the reaction wheels in relative and real t time. To determine these relationships, we use the known solution of a linear homogeneous second-order differential equation describing the rotational motion of a rigid body with the characteristic Equation (32) in real time t [15]:
where is the angular position of the body around the axis of rotation, . For initial conditions where the initial kinetic moment of the body is zero, the solutions in real and relative time, respectively, are:
and
The maximum absolute values of the angular velocities and accelerations of the body in real t and relative time are determined by the following expressions:
and
Comparing the expressions for the angular velocities and accelerations of the body in real and relative time in equations (36) and (37), we get:
Let us use equalities (38) to determine the relationship between the highest absolute values of angular velocities and control torques of reaction wheels in relative and real time: and and . For the absolute values of the angular velocities and control moments of the reaction wheels, considering equations (38), we have:
Accordingly, for the highest absolute values of the angular velocities and control moments of the reaction wheels in relative and real time, we have:
From equations (40), it follows that when transitioning from relative time to real time, the highest absolute values of the angular velocities of the reaction wheels increase by times, and the highest absolute values of the control moments of the reaction wheels increase by times. The value of the transition scale between relative and real t time, considering equations (40), can be determined using the following algorithm:
- 1)
- solve the system of nonlinear differential equations (6) or the system of linear differential equations with variable parameters (7) under given nonzero initial conditions at the optimal values of the control law parameters (31) in relative time ;
- 2)
- construct graphs of the obtained transient processes for the control moments and the angular velocities of the reaction wheels in relative time ;
- 3)
- determine the highest absolute values of the control moments and the angular velocities of the reaction wheels on the obtained graphs of the transient processes in relative time ;
- 4)
- determine the achievable maximum absolute values of the control moments and the angular velocities of the reaction wheels in real time t the from a technical characteristic of the drives;
- 5)
- determine the values of the transition scale from relative time to real time t using equations (40):
- 6)
- we choose the smallest from the six obtained values of the transition scale , which ensures that all constraints are met (25):
- 7)
- we determine the optimal values of the parameters of the control law (33) for real time t and solve a system of differential equations (6) or differential equations (7) with given non-zero initial conditions in real time t based on the selected scale value ;
- 8)
- we plot the obtained transients and determine the maximum absolute values of the control moments and angular velocities of the reaction wheels in real time t;
- 9)
- we check the fulfillment of conditions (25) for the constraints of the optimal synthesis problem.
8. Numerical Example
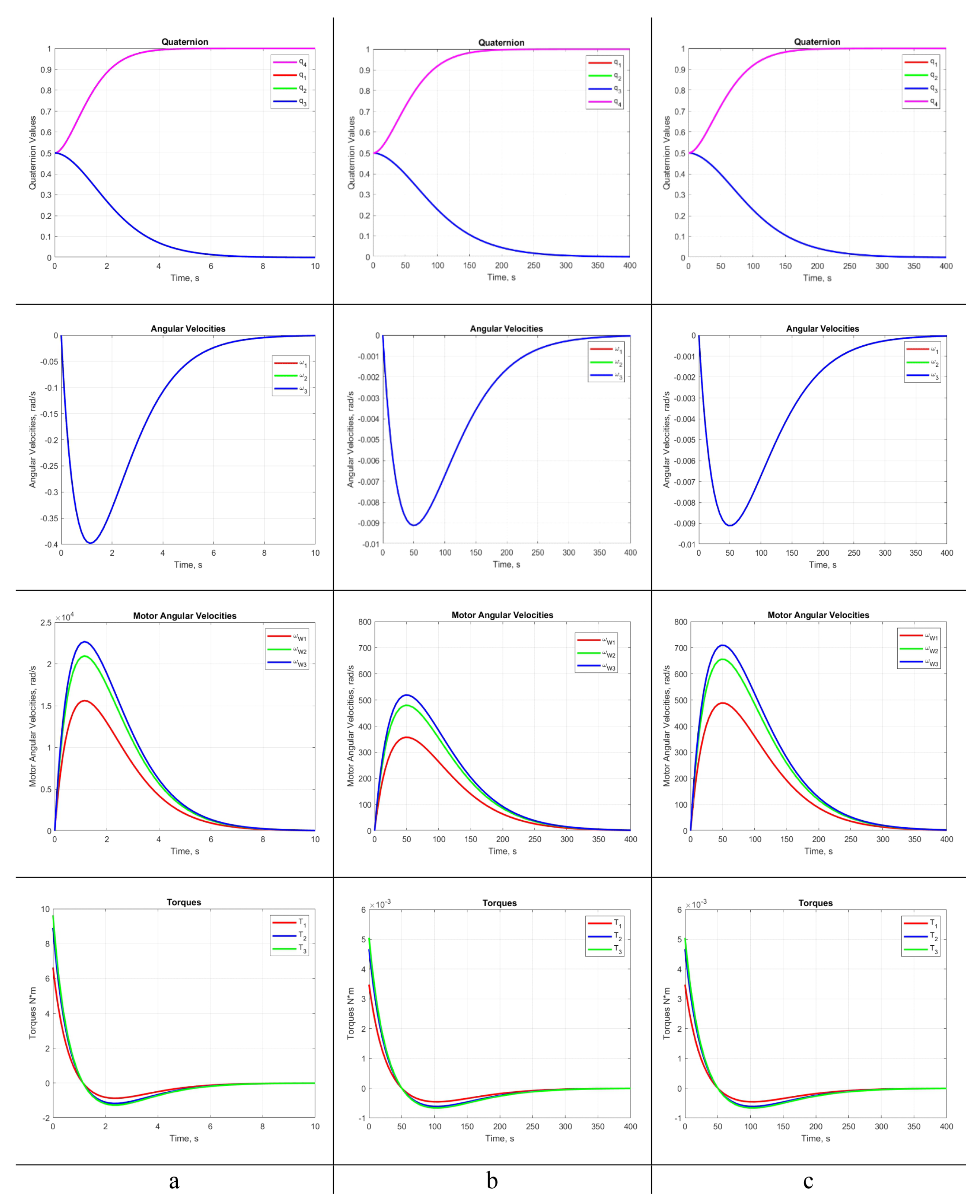
In this example, a rigid microsatellite with three reaction wheels installed in three body-fixed axes is the researched object. Data for a rigid microsatellite [9]: , . Maximum absolute values of control torques and angular velocities of reaction wheels’ are: and . Initial conditions are: . The optimal values (31) of parameters of the control law are determined based on the requirement that the normalized characteristic equation has multiple roots or the binomial coefficients (26). Reaction wheels maximum absolute values of the control moments and angular velocities are determined from the graphs of the solution of the system of differential equations (7) with given non-zero initial conditions at optimal values of the parameters of the control law (31) in relative time , shown in Figure 1a. As a result of steps 4–6 of the algorithm, the transition scale from relative time to real time was determined to be , and the optimal values of the control law parameters (33) were determined based on this value. Graphs of transients for control moments and angular velocities of reaction wheels in real time t, obtained by solving the system of differential equations (7) with given non-zero initial real-time t conditions are shown in Figure 1b. The results of steps 7-8 of the algorithm are presented in Table 1.

| j | 1 | 2 | 3 |
| , rad/s | 15614.3 | 20960.4 | 22679.6 |
| , Nm | 6.63 | 8.9 | 9.63 |
| 0.04547 | 0.03387 | 0.03131 | |
| 0.027599 | 0.02382 | 0.022899 | |
| , kgm2 | 0.30365 | 0.40762 | 0.44105 |
| , kgm2 | 0.00695 | 0.00933 | 0.0101 |
| , rad/s | 357.448 | 479.832 | 519.189 |
| , Nm |
Analysis of the data in Table 1 shows that all conditions (25) for the constraints of the optimal synthesis problem are satisfied. At the same time, as follows from the comparison between the values of and from the third and fourth rows of Table 1, the constraints associated with the maximum values of angular velocity are fulfilled with a margin of times. This allows reducing the moments of inertia of the reaction wheels by a factor of to . The results of steps 7-8 of the algorithm are presented in Table 2.
| j | 1 | 2 | 3 |
| , rad/s | 21348.8 | 28658.2 | 31008.9 |
| , Nm | 6.63 | 8.9 | 9.63 |
| 0.03326 | 0.02477 | 0.022899 | |
| 0.02759 | 0.02382 | 0.022899 | |
| , kgm2 | 0.30365 | 0.40762 | 0.44105 |
| , kgm2 | 0.00695 | 0.00933 | 0.0101 |
| , rad/s | 488.372 | 655.582 | 709.355 |
| , Nm |
Graphs of transients for control moments and angular velocities of reaction wheels in real time t, obtained by solving a system of differential equations (7) with given non-zero initial conditions in real time t, are shown in Figure 1c.
Figure 1.
9. Conclusions
The problem of optimal synthesis of the parameters of the control law of a nonlinear SACS under constraints associated with the effect of reaction wheels saturation is formulated. As engineering requirements to the developed method of solving the problem, the possibility of taking into account constraints for maximum control torques and angular velocities of reaction wheels, which are achievable within the physical capabilities of the drives, is considered. The maximum stability degree of the control system SACS is considered as a criterion for the optimality of the parameters of the control law, and the maximum absolute values of the control moments and angular velocities of the reaction wheels are considered as constraints. The method of solving the problem is based on the use of the linear model SACS obtained by the authors of the article and provides, along with the optimization of the system parameters, its global asymptotic stability, as well as the required indicators of the control quality in the system.
The decomposition of the problem of synthesizing control law parameters based on control quality indicators into two subtasks was carried out: obtaining the required form of the transient process and obtaining the required speed of the SACS. To solve the decomposition problem, the notion of normalized characteristic equation of SACS is used. This allows us to solve the subtask of obtaining the required form of the transient process regardless of the requirements for the speed of the SACS. If the quality of the transient process meets the requirement for its shape, then the required transient speed is provided by the appropriate choice of the transition time scale.
A method of synthesizing the optimal form of the transient process of the SACS by the criterion of its maximum stability degree has been developed. The maximum absolute values of the control torques and angular velocities of the reaction wheels, which are achievable within the physical characteristics of the drives, are considered as constraints of the optimal synthesis problem. The synthesis method uses the optimal location of the roots of the normalized characteristic equation of the SACS according to the criterion of the maximum stability degree. The known roots of the normalized characteristic equation are used to calculate its dimensionless coefficients, which can be used to determine the six unknown parameters of the control law of the SACS by solving a system of six nonlinear algebraic equations. The system of six nonlinear algebraic equations with six unknowns generally has no analytical solution and therefore is solved generally by iterative methods.
An analytical method based on the decomposition of the normalized characteristic polynomial of the SACS into three identical multipliers for determining the optimal values of the parameters of the control law is proposed. This makes it possible to decompose the problem of optimal synthesis of control law parameters into three subtasks of synthesis of linear control systems of the 2nd order with identical normalized characteristic equations. Optimal values of the parameters of the control law of linear control systems of the 2nd order according to the criterion of the maximum stability degree are expressed analytically directly through the dynamic parameters of the system.
A method based on the use of the scale of transition from relative time to real time has been developed, considering the constraints on control moments and angular velocities of reaction wheels in the problem of optimal synthesis of SACS. It is shown that during the transition from relative time to real time, the maximum values of the control moments and angular velocities of the reaction wheels will vary depending on the values of the transition scale. The relations between angular accelerations, control moments and angular velocities of reaction wheels in relative and real time are found, as well as the corresponding relations for the maximum absolute values of angular velocities and control moments of reaction wheels in relative and real time. An algorithm for calculating the scale of the transition from relative time to real time has been developed, which ensures the fulfillment of the conditions of all constraints in the problem of optimal synthesis of the parameters of the control law of the SACS.
An example of solving the problem of optimal synthesis of the SACS is considered, the results of which demonstrate the wide possibilities of the proposed methods and algorithm for the targeted selection of technical characteristics of the engines used, considering constraints on the maximum absolute values of angular velocities and control moments of the reaction wheels. It is shown that the proposed methods and algorithm makes it possible to minimize the required moment of inertia of reaction wheels from the condition of simultaneously achieving the limit values of control torques and angular velocities of reaction wheels at the same time.
Author Contributions
`Conceptualization, M.M.; methodology, M.M.; software, A.A. and Y.O.; validation, N.Zh., Y.O. and A.A.; formal analysis, N.Zh.; investigation, A.A. and Y.O.; resources, N.Zh.; data curation, M.M.; writing—original draft preparation, A.A. and Y.O.; writing—review and editing, M.M.; visualization, A.A. and Y.O.; supervision, M.M.; project administration, M.M.; funding acquisition, M.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research has been funded by the Science Committee of the Ministry of Science and Higher Education of the Republic of Kazakhstan (Grant No. BR20280990).
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Wie, B.; Lu, J. Feedback Control Logic for Spacecraft Eigenaxis Rotations Under Slew Rate and Control Constraints. Journal of Guidance, Control, and Dynamics 1995, 18, 1372–1379. [Google Scholar] [CrossRef]
- Nudehi, S. S.; Farooq, U.; Alasty, A.; Issa, J. Satellite attitude control using three reaction wheels. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA; 2008; pp. 4850–4855. [Google Scholar] [CrossRef]
- Navabi, M.; Hosseini, M. R. Spacecraft quaternion-based attitude input-output feedback linearization control using reaction wheels. In Proceedings of the 2017 8th International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey; 2017; pp. 97–103. [Google Scholar] [CrossRef]
- Romero, A. G.; de Souza, L. C. G. Satellite Controller System Based on Reaction Wheels Using the State-Dependent Riccati Equation (SDRE) on Java.
- Guarnaccia, L.; Bevilacqua, R.; Pastorelli, S. P. Suboptimal LQR-based spacecraft full motion control: Theory and experimentation. Acta Astronautica 2016, 122, 114–136. [Google Scholar] [CrossRef]
- Romero, A. G.; de Souza, L. C. G. Stability Evaluation of the SDRE Technique based on Java in a CubeSat Attitude and Orbit Control Subsystem. WSEAS Transactions on Systems 2021, 20, 1–8. [Google Scholar] [CrossRef]
- Romero, A. G. Application of the SDRE Technique in the Satellite Attitude and Orbit Control System with Nonlinear Dynamics. sid.inpe.br/mtc-m21d/2021/12.07.02.34-TDI 2021.
- Khamis, A.; Zydek, D. Finite Horizon Optimal Nonlinear Spacecraft Attitude Control. The Journal of the Astronautical Sciences 2019, 67, 1002–1020. [Google Scholar] [CrossRef]
- Zhou, H.; Wang, D.; Wu, B.; Poh, E. K. Time-optimal reorientation for rigid satellite with reaction wheels. International Journal of Control 2012, 85, 1452–1463. [Google Scholar] [CrossRef]
- Wu, B.; Cao, X.; Li, Z. Multi-objective output-feedback control for microsatellite attitude control: An LMI approach. Acta Astronautica 2009, 64, 1021–1031. [Google Scholar] [CrossRef]
- Moldabekov, M.; Sukhenko, A.; Orazaly, Y.; Aden, A. Dynamics Analysis of a Nonlinear Satellite Attitude Control System Using an Exact Linear Model. Mathematics 2023, 11, 2614. [Google Scholar] [CrossRef]
- Sidi, M. Spacecraft Dynamics and Control: A Practical Engineering Approach. Cambridge Aerospace Series; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Knudsen, J. M.; Hjorth, P. G. Elements of Newtonian Mechanics, 1st ed.; Springer: Berlin, Germany, 1995; Available online: https://archive.org/details/elementsofnewton0000knud_k3t3 (accessed on 21 July 2024).
- Demidovich, B. P. Lectures on Mathematical Theory of Stability (Lekcii po Matematicheskoi Teorii Ustoichivosti). Nauka, Moscow. 1967; 472p. Available online: https://ikfia.ysn.ru/wp-content/uploads/2018/01/Demidovich1967ru.pdf (accessed on 21 July 2024). (In Russian).
- Besekerskiy, V. A.; Popov, Ye. P. Theory of Automatic Control System (Teoriya sistem avtomaticheskogo upravleniya), 4th ed.; SPb.: Professiya, 2007; 747 p, ISBN 5-93913-035-6. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



