
Submitted:
28 April 2024
Posted:
29 April 2024
You are already at the latest version
Abstract
The sustainable development of an area is highly dependable on reliable electrical energy supply. Microgrids are important in integrating distributed energy resources (DERs) using power electronic converters. However, microgrid control becomes challenging with the increasing number of distributed generators and loads. With the conventional droop control method, power contributions from DER converters cannot be accurately shared due to a mismatch of line impedances. In this paper, an augmented hierarchical control mechanism is proposed to solve the issues mentioned above. This hierarchical control mechanism consists of primary and secondary controllers. The primary stage utilized the droop controller to improve optimal power flow, mainly for the resistive network. The secondary stage is based on an improved methodology to compensate for the voltage and frequency variations during small and large signal disturbances. Moreover, the modelling and analysis for PMSG-based wind energy conversion systems are also presented. The response of the primary controller for the active and reactive power sharing is investigated. The analysis emphasizes the demonstration of optimal power-sharing under normal and abnormal conditions for the considered load. Finally, the suggested robust controller's performance is evaluated in MATLAB environment and simulation results show the proposed scheme's superiority under different operating conditions.
Keywords:
Battery Energy Storage System
; Distributed Power Generation System
; Frequency Response
; Hierarchical Controller
; Microgrid
; Wind Energy Conversion System
1. Introduction
Energy from sources that can support present
operations without jeopardizing future energy needs or mitigating climate
change is required for development to be deemed sustainable. The energy needs
of the present are satisfied by sustainable energy sources, which also preserve
the potential for future power generation. There has been a major shift in the
energy landscape due to growing worries about resource depletion, climate
change, and environmental degradation. Using power electronic converters in this
situation requires integrating distributed energy resources (DERs) in a
significant way. However, as the number of distributed generators and loads
increases, controlling an integrated system becomes more difficult [1,2]. Droop control, which offers autonomous and
balanced power distribution, was proposed by researchers for microgrids.
Unfortunately, because of a mismatch in line impedances, power contributions
from DER converters cannot be precisely shared with the usual droop control
method. A communication-based centralized control mechanism is essential to
resolving the aforementioned problems. The primary and secondary controllers of
an improved communication-based hierarchical control mechanism are presented in
this study. The droop controller is employed by the primary stage to enhance
the best power flow, primarily for the resistive network. The secondary stage
uses an enhanced process to adjust for voltage and frequency fluctuations
caused by both minor and major signal disruptions. Lastly, the performance of
the introduced robust controller is assessed in a MATLAB environment, and
outcomes findings demonstrate the excellence of the recommended technique in
various operational scenarios. A ground-breaking technology called microgrids
(MGs) has been developed to improve the infrastructure for electric power.
1.1. Literature Review
In today’s scenario, the energy sector is steadily
moving toward the era of smart grids (SGs) to attain greener, resilient,
reliable, and efficient power networks. Unlike a single DG unit, microgrids can
provide better energy management over distribution networks and ensure better
reliability to critical loads, especially when main-grid power is unavailable.
The microgrid concept is crucial for integrating DG units into the grid. Both
islanded mode (IM) and grid-connected mode (GCM) should be supported by a
microgrid. Microgrids have a range of uses, such as controlling the flow of
electricity through distribution networks in the event of a grid failure [3]. The power flow issue for islanded
droop-regulated microgrids has been written about by many authors. Because
droop management is resilient and doesn’t require high bandwidth transmission,
it is widely used for DGs operating in parallel. Droop control makes it
possible for DGs to run concurrently. The primary factors influencing droop
control are the load characteristics and the line’s impedance. Droop control is
unreliable because differences in line impedance can affect voltage and
frequency. By mimicking suitable line impedance behaviors, the virtual
impedance (VI) can be utilized in conjunction with droop control to increase
dependability. In contrast, the VI control methods rely on the utilization of
real-time line impedance data, which is not always available. Furthermore, it
might not be feasible to adjust the inverter’s output impedance to be mostly
inductive or resistive using VI approaches because the line might contain both
inductive and resistive components. A hierarchical control system for effective
power management and coordinated control of a solitary MICROGRID was presented
in [4]. The secondary stage uses a
high-bandwidth communication-based controller to compensate for the active
power management handled by the primary stage. [5]
proposed a hybrid energy storage system control mechanism with a self-recovery
capacity for the DC bus voltage. Proportional-integral regulation was used to
reduce the DC bus drop voltage, and virtual droop control was utilized to
achieve low- and high-frequency power decomposition. With this approach, energy
supply and storage might remain consistent even in the face of frequent power
spikes. Simulations using MATLAB/Simulink were used to test the proposed
control strategy. In order to address demand generation inconsistency and DC
bus voltage constraints, a novel method based on variable structural management
for power-sharing between batteries and supercapacitors was introduced in [6]. The solution outperformed conventional control
methods in terms of peak DC bus voltage changes, as demonstrated by the
simulation results. The results were experimentally verified using a real-time
hardware-in-loop simulator based on field-programmable gate arrays. A DC
micro-grid power-sharing plan was proposed in [7]
to guarantee that distributed battery energy units maintain a steady state of
charge (SoC). The droop coefficients were computed taking into account the SOC
values, and the accurate power sharing was achieved by employing BEU virtual
power ratings that were adjusted to SOC levels. As part of a power-sharing and
control system, [8] proposed a fuel cell
stack, an ultra-capacitor module, a solar array, and other loads. Optimal power
sharing and energy management system was in charge of overseeing and managing
the overall coordination of the PV and FC systems, as well as the loads and
controllers of the electrolyzes and ultra-capacitor storage systems. A linear
weighted summation approach with adjustable weights was presented in [9] as a method for balancing the two main
optimization goals of a hybrid energy storage system, namely SoC reserve and
power loss reduction. The technique aims to reduce energy loss, preserve the SC’s
charge level, and distribute power among multiple energy storage components
while solving a MOP and achieving the best ratio of power distribution between
the SC and the battery.
Assuming that communication was possible, It was
strongly advised to use the secondary control to support the droop control by
adjusting for variations in frequency and voltage [10,11].
Other studies have been carried out under the same general topic using the
hierarchical control structure, which consists of primary, secondary, and in
some cases even tertiary control [12–14]. A
hierarchical control system was described in [15]
for the coordinated management and active power control of a single microgrid. The
principal step was intended to perform active power management, while the
secondary step was set up to employ high-bandwidth communication to counteract
fluctuations in voltage and frequency. An improved droop mechanism with a
simple communication link was described in [16]
to maximize sharing of reactive power in an independent microgrid. There were two
actions involved in the execution of this approach. A low-bandwidth signal is
first utilized to adjust the droop control’s voltage bias. In the second phase,
the voltage magnitude is raised to its starting value by making up for the
voltage drop. In [17], a hierarchical control
for frequency stability in different microgrids was introduced. Three temporal
zones were created for the control structure: the first, second, and third
zones, which were categorized as short-term, long-term, and transient perturbation,
respectively. In [18,19], the centralized or
decentralized hierarchical methods for a microgrid were discussed, and
subsequent directions for microgrid hierarchical control were forecast. The
majority of study investigations for islanded microgrids that are published in
the literature did not take into account the smooth transfer between both
linked and isolated modes [20]. Moreover, the droop technique —which is the recommended approach
to apply in cases when the circuit impedance is predominantly resistive—was not
covered concerning the hierarchical control structure.
1.2. Contributions
The introduction of some renewable energy sources
is a key source of a sustainable level of energy due to the increasing electric
load demands in recent years. As a result, non-traditional energy sources such
as solar and wind energy must be used to meet energy demands. This work
proposes the modelling and simulation of a wind energy conversion system to
achieve a continuous power supply. The goal of this technology’s development is
to enhance power transfer to the load in a range of weather scenarios.
Additionally, a MATLAB/Simulink model and simulation of a microgrid based on a
wind energy conversion system are evaluated for multiple case studies.
Presenting a hierarchical controller for enhancing frequency response in
several operating modes is the main objective of this work. Additionally, the
suggested controller enables the best possible power-sharing amongst DGs in a
range of operating modes. The results show how the recommended controller’s
insight features help to maintain the best possible power flow under different
conditions.
This is how the rest of the article is organized: Section 2 describes the detailed construction
of the WECS-based Microgrid Model. The control strategies for parallel
functioning DGs are presented in Section 3.
These include hierarchical control of microgrids with primary and secondary
control and operating mode of transition, droop control, and virtual impedance
droop control. Section 4 presents the
case study and related findings. Section 5
concludes this task, and is followed by references.
2. WECS Based Microgrid Model
Figure 1
represents the layout of the proposed system where wind resources are used to
generate a sustainable power supply. For integrating DG units into a microgrid,
it’s essential to understand the operational characteristics of the DG units
and microgrid during GCM and IM modes of operation. The typical grid-tied
microgrid configuration consisting of two types of DG units, loads and battery
energy storage system (BESS), is considered that is depicted in Figure 1. The aggregated model is considered
and modelled in MATLAB/SIMULINK software environment. To keep the voltage level
constant at the load end, the pulses of the inverter are varied using a
controller and pulse width modulation (PWM) technique. The system uses a simple
LC filter which maintains the power quality at the load side within the IEEE
Std 2030.7-2017 [21].
2.1. Modelling of ESSs-Backed DG1
The analogous model of the DG unit integrated with
an energy storage system linked to the PCC and equipped with an output LCL
filter is depicted in Figure 2. This
arrangement functions as a master unit; the structure is inexpensive and
simple. The master units are typically categorized as DG, BESS, or BESS
integrated with DG [22]. The microgrid may
only run in the islanded mode for a brief period of time when BESS is utilized
as the master controller because BESS gradually drains its power [23]. Consequently, in this work, the combination of
DG and ESS is modelled to function as master controllers. Renewable energy
sources like solar and wind turbines are most suited for this strategy [24]. The master units DG or ESS of a microgrid in
island mode function in V/f control mode, setting both voltage and frequency
references for other DGs in PQ control mode. The main grid provides voltage and
frequency references for the microgrid in order for the grid-tied operation of
the microgrid system to function. In the event of a utility-side anomaly, the
micro-grid can quickly transition from grid-tied to island mode [25].
The modelling of DG1 is shown in Figure 2; here, the boost converter’s control
utilizes a lookup table of wind turbine characteristics to attain maximum
power. The control of the buck/boost converter simultaneously attempts to
control the battery current on both sides and maintain a constant DC-link
voltage. The battery will be required as long as DG1 controls voltage and
frequency in islanded mode. With a rated power of 300 kWh and operating voltage
of 800 V, the current is set to be:
The and are the gains of the current controller, and is the operating voltage of the battery energy
storage. During islanded mode, the grid-side converters maintain constant for the microgrid load. On the other
hand, the power converter has the necessary active power to charge the battery
during GCM and transfers excess active power to the grid. The current
references are produced by two distinct current control loops. During the
autonomous mode of operation, two-stage hierarchical control is used in the
first loop to modify the current references [16,26].
In grid-tied mode, the second loop primarily depends on the battery’s charge
status (SOC). The next part provides a general explanation of both control
loops. The voltage and current references are transformed to form. Ignoring the impact of the filter capacitor
yields the output voltage from the voltage control loop.
The filter inductor’s compensation element is
denoted by , while the control gains for the direct and
quadrature current controllers are represented by , , and .
2.2. Control Scheme for PMSG Based DG2
DG2 used regulated converters on both sides of the
apparatus, as seen in Figure 3. The wind
turbine’s maximum power is extracted via the stator side converter. The used
wind turbine’s reference torque can be expressed as
Where is speed reference of the rotor, and , , are the torque regulator’s control gains. Using
the rotor speed as indicated in Figure
3, the maximum active current is calculated using the MPPT technique. In the reference frame, the reference current of this
converter is written as
stands for the number of pole pairs, for magnetic flux, and for the electrical torque reference value in
equation (5). In grid-connected mode, the grid sets the frequency of the DG
units [27]. By altering the set frequency,
which will change the power angle between the main grid and the microgrid, new
active power setpoints can be created. Concerning every mode of microgrid
operation, the DG2 GSC has particular objectives. Nonetheless, maintaining
DC-link voltage and adding as much active power as feasible to the microgrid bus
system are the goals of grid-tied operation. Thus, the reference frame’s current components are set to be
where and are the preset and actual DC-link voltages, respectively; the proportional and integral gains of the DC-link voltage regulator are denoted by , and , respectively.
Sometimes the active power generated exceeds both the DG1 battery’s usable capacity and the load demand. A proposed adaptive control system aims to eliminate power imbalances that may occur during autonomous mode. [28].
In (7) is total active power needed for microgrid loads. The required reactive current reference is evaluated by utilizing the surplus power held within the DC-link capacitor. The reactive current available is shown in (8).
A PI regulator is used to adjust the reactive current reference to maintain available reactive current less than the required reactive current.
Here, must be constrained by As a result, if adaptive control is used to adopt the necessary active current, the DC-link voltage controller is disabled. In this case, a chopper converter is used to charge the capacitor in the DC-link.
2.3. Battery Energy Storage System
Microgrids can sustain grid stability while high penetration of renewable energy resources (wind, photovoltaics) makes it difficult to offer dependable power due to intermittency and variation difficulties. Distributed energy storage (DES) can be quite helpful in these situations for improving security, dependability, and stability. One DG unit combined with a BESS combo is used as the master unit in this study. During the inverter’s grid-forming process, this combination is crucial [11].
3. Control Strategies for Parallel Operating DGs
One crucial aspect of microgrid operation is the microgrid energy management system (MEMS), which is the mechanism for microgrid control. It includes the control features that make up a microgrid, which is a self-governing system that may run alone or in conjunction with the main distribution grid, and connect and disconnect with ease. The droop control method is commonly used to provide active power-sharing, as seen in Figure 4.
3.1. Droop Control
droop control was used by synchronous generators in the transmission system to control speed [29]. In order to precisely distribute power across several generators and limit the amount of mechanical power input, each generating unit monitors and reduces its speed. The generated active power, , is drooped proportionately to the measured frequency, , in the traditional droop control method [30]. In converter-based microgrids, measuring active power is simpler than measuring frequency, therefore is drooping as a function of . For a certain generating unit , the and droops are displayed in (10) and (11).
Here and are the droop constants and PLL measures the actual frequency of the microgrid, and measurement value is compared with the nominal frequency [31]. According to the droop control gradient, any frequency mismatch is interpreted as power changes [32]. The droop control method is communication free operation and works in plug and play integration with good reliability [33].
3.2. Virtual Impedance Droop Control
Inverters in a microgrid can share active and reactive power more effectively thanks to the virtual impedance (VI) droop management algorithm [34]. As seen in Figure 5, the control designer for VI droop control can alter the effective impedance between the inverter and the load. The current flow in the feeder impedance branch is measured, and the result is multiplied by the suitable impedance that the designer selected. The converter’s voltage reference is changed via the adjusted impedance [35]. The designer duplicates an actual system impedance under steady-state conditions by simulating impedance as a quasi-stationary virtual impedance. Since the real impedances behave differently during the transient period, an increase in the rate of change of current will result in an increase in the voltage drop across the inductor [36]. On the other hand, the voltage quality could deteriorate as a result of adding virtual impedance [37]. To achieve appropriate power-sharing, the literature offers yet another sophisticated method based on hierarchical control.
3.3. Hierarchical Control of Microgrid
This article proposes a hierarchical control technique based on two-level energy storage to achieve optimal power flow and adaptable microgrid operation, as illustrated in Figure 6.
3.3.1. Proposed Hierarchical Control Mechanism
A two-level energy storage based hierarchical control approach is developed to guarantee the microgrid operates properly; this helps to maintain system stability, as illustrated in Figure 6. Here, the primary objective is to instantly modify the distributed generators’ reference signal in accordance with the intended results. Additionally, for the grid-tied operation of microgrid, the internal control layers oversee synchronization between the microgrid and the external grid [39]. The next subsection provides a thorough overview of primary and secondary controllers.
3.3.2. Primary Controller
Inverter-based DGs use droop control to emulate the synchronous generator’s behavior, especially for resistive networks [38]. To comprehend the fundamentals of conventional droop techniques, have a look at the comparable circuit of a VCVSI connected to an AC bus, as illustrated in Figure 7 [40].
Assume that an effective line impedance of is created by combining the output impedances of the line and the converter. The following formula is used to compute the complex power delivered to the common AC bus [40].
The preceding equation can be simplified to if the operative line impedanceis assumed to be entirely inductive.
and stand for the grid voltage and the inverter output voltage, respectively. The droop control for the system with resistive line impedance is shown in Figure 8. It is possible to express the droop expressions as (14) and (15), respectively.
Here, droop slopes as defined in (14) and (15) are represented by and , respectively, and the current voltage and frequency are represented by and . Thus, as shown in (16) and (17), and , respectively, indicate the measured active and reactive powers.
3.3.3. Secondary Controller
The primary internal controller is subordinate to the microgrid central controller at the second level of control. In this case, the primary objective is to modify the distributed generators’ reference points within a microgrid. In grid-connected operations, the internal control also oversees synchronization between the microgrid and utility grid [41]. The droop control may cause a departure from the nominal values in the event of abrupt changes in load. In this context, low bandwidth communication based secondary controller is designed to address these issues [42]. This controller regulates variation in voltage and frequency during sudden load variation [43]. Three-phase instantaneous voltages and frequency is converted into synchronously rotating reference frame to make computations easier, as represented in Figure 9.
The direct and quadrature voltages can be calculated as follows:
Here, stands for the adjusted voltage references in form, and and represent the secondary stage controller gains. Because it lessens the steady-state inaccuracy caused by the first stage, this method is more effective than the traditional secondary method. Table 1 provides the controller gain parameters. In this step, the updated voltage references are acquired as specified in equations (22) and (23).
3.3.4. Seamless Mode Transition
For DGs1, the mode transition is mainly discussed [44,45]. Through a load pick-up strategy, the microgrid can restore voltage and frequency for an islanded mode of operation thanks to the grid forming function of the converter [46]. Figure 10 depicts a microgrid’s operating modes. The main grid can quickly and dominantly adjust both frequency and voltage, thus switching from isolated to grid-connected modes—or vice versa—just requires flipping the static switch on or off. As can be seen in Figure 11, the STC continuously checks the state of the microgrid and the utility grid. It has attempted to restart the plant, synchronize the frequency of the system, and supply power to the main grid. At this stage, a few details need to be taken into account, like reactive power balance, transient voltage commutation, balancing power generation, starting sequence, and DGs unit coordination. Lastly, we observed the process of switching a microgrid between grid-connected, islanded, and shutdown modes of operation [47].
3.3.5. Grid-Connected to the Islanded Operating Paradigm
In this shift, two factors are crucial. The primary objective of DG1 for the grid-tied operation of microgrid is to inject available active power and estimate the active power needed to charge the battery. The first step is the prompt diagnosis of the issue to prevent system deterioration and appropriate adaptation to mode transition. For main grid synchronization, the phase-locked loop (PLL) is employed in this instance. As a result, the following formula can be used to get current references:
Here and stand for the current that the battery is charging and the output current of the rectified PMSG, respectively. The reactive current in grid-connected mode is zero. Consequently, the utility grid provides the reactive load. The microgrid must cut its connection to the utility and function independently in the event of any abrupt abnormal conditions, such as a fault or a significant frequency variation. When the inputs of the PI controller reach zero, the compensator needs to be disabled in order for the current regulator to operate in the grid-forming mode. Consequently, the following can be used to determine the current references.
The (25) and (26) can therefore be expressed as,
Thus, for an inverter running in grid-forming mode, and represent the direct and quadrature current references. On the other hand, for direct and quadrature current regulators, the proportional and integral gains are, respectively, , , and .
3.3.6. Islanded Mode to Grid-Tied
During mode transition, a large transient current may generate. It may result in equipment damage, so specific resynchronization must be performed before the grid-tied operation to enhance a smooth transition of mode transformation [48]. This article proposes an microgrid inverter pre-synchronization control approach based on droop control. The pre-synchronization method is an excellent way to bring microgrid’s synchronizing components under the confines of their prominent grid contemporaries [49]. To synchronize with the utility grid, the instantaneous amplitude of the and components in droop control needs to be updated. The new preset reference voltage and droop control’s angular frequency are shown in Figure 12.
are the grid and microgrid side voltages, frequencies, and phase angles, respectively. The synchronizing time is reduced by accurate tuning of gains for controllers. As shown in Figure 12, the voltage component’s PI gains can be adjusted individually. Furthermore, because of their mutual influence, the gains of the phase angle and frequency components are set together. When the inputs of the controllers equal zero, the will reconnect to the main grid via the static switch, changing the control strategy simultaneously. An extracts the main grid voltage with the fundamental frequency during synchronization because the main grid voltage frequently contains specific harmonics. In this transition, it’s important to note that the droop control outputs in reference form serve as the references for the second stage. Disabling the secondary step during the synchronization process is not necessary.
4. Simulation Results and Discussions
The simulations are conducted and verified with MATLAB/Simulink for the proposed system considering an improved power-sharing strategy. Table 2 and Table 3 provide the parameters with respect to the DGs rating as well as the controller settings. Three instances were examined in this research project in order to examine how faults and variations in load affect the stability of the system and the suggested controller’s ability to share power.
4.1. Proposed Cases
The impact of three-phase severe fault is analyzed on optimal power-sharing and small- signal stability for the proposed hierarchical control mechanism of WECS based microgrid. This research addressed three cases to study the impact of the controller on microgrid stability and optimal power flow. The controller’s insight performance and system capability during severe faults have been investigated in various conditions. The optimal power-sharing is analyzed for the following cases, which are described as:
Case 1: Smooth mode transition
Case 2: Sudden load variation
Case 3: Fault analysis
4.2. Seamless Mode Transition
The electric grid outage is planned to happen at t=2s. In order to prevent load shedding, the control strategy DG1 switches to the grid forming technique for the duration of the outage. During this time, microgrid -generated power is adequate to feed the local load. The active power-sharing between DG1 and DG2 at the point of common coupling (PCC) during mode transition is depicted in Figure 13a,c. The frequency response of DG1 and DG2 at the point of common coupling (PCC) during mode transition is displayed in Figure 13b,d. Restoration performance of secondary controller: using conventional and suggested controller, DG1 power flow is displayed in Figure 14a, voltage response in Figure 14b, current response in Figure 14c, and frequency response in Figure 14d. It is discovered that the suggested method lowers the massive current transient, as illustrated in 14 (b).
4.3. Effects of Large Changes in Load
Generally speaking, a frequency deviation results from any power variation in the load or generation. Wind turbine generators having constant speed offer a low inertia level, typically between 2s to 4s. This is possible because fixed speed wind turbines are directly coupled with the system, and their speed depends on the system frequency. If demand is lower than a generation, frequency increases, and if demand is higher than available power, then frequency decreases. When a mismatch in electrical power is present in the system, the connected generators will have to increase or decrease their speed.
To assess the impact of load variations on the suggested controller, a 50 kW active load is added at t=2.5 s and subtracted at t=3 s. Figure 15 shows the restoration’s performance of the proposed controller during balanced load change: (a) Power sharing of DGs, and (b) Load current. The simulation results show smooth power flow during load variation and overshoot of load current damped evidently as represented in the result. If the load is disconnected from the network, then it leads to an increase in frequency. Therefore, a frequency control mechanism is implemented to mitigate the frequency deviation right after the disturbance of the loads. In the Simulink model the DG1 and energy storage are assumed to support the frequency. A microgrid’s performance may generally be increased by both a diesel unit and a battery; however, a battery normally has faster control over active and reactive power than a diesel unit. 50kW of loads are disconnected at t=2.75s, therefore frequency rises to control it. Similar to wind, DG units can lower their power in order to facilitate frequency responsiveness. A 50kW load is added at t=3s; in this scenario, the frequency starts to decrease, and the DG units cannot support frequency response if they are unable to raise their output. By raising its active power during this time, the battery can sustain the frequency. Figure 16 illustrates how well the suggested controller restored the load with a balanced change in load: Load power (a) and load current (b).
4.4. Performance Analysis during a Three-Phase Fault (Short- Circuit Fault)
One of the most serious defects in the electric system is a short-circuit in a three-phase system. To model the performance of the suggested controller, a three-phase short-circuit fault is applied at the grid side. For a period of two seconds, the problem occurred at t = 3 and was resolved at t = 3.2. The restoration of the secondary stage’s performance during the three-phase fault is depicted in Figure 17 as (a) frequency response and (b) reactive power posture. The suggested controller performance for the restoration during a three-phase fault is depicted in Figure 18: responses in terms of voltage (a) and current (b). The microgrid works in an islanded mode and disconnects from the main grid in the event of a fault in the main grid. Additionally, this is known as unintentional islanding. Power deficits in both active and reactive domains could occur during the malfunctioned state. The necessary power and upkeep were provided by the controllers linked to the BESSs. As illustrated in Figure 17, the controller therefore controls the microgrid’s power balance and frequency stability during the faulted situations. The ESS supplies the appropriate amount of reactive power to the PCC in order to stabilize the voltage in the event of a short-duration voltage malfunction in the main grid. The circuit breakers in Detroit’s microgrid instantly cut it off from the main grid and put it in island mode in the event of a serious outage in the main grid or power quality.
5. Conclusions
This study offers a strong hierarchical control framework that microgrid can use to achieve ideal power flow and smooth transitions between islanded and grid-tied modes of operation. Here, each of the two DGs has a distinct goal. The DG1 unit, which is coupled to the BESS, regulates frequency stability while the system is in the islanded mode of operation. In contrast, DG2 is operated with grid-integrated adaptive control to avoid power imbalance during load changes or excess power generation. Moreover, this study also focuses on optimal power-sharing during load variation and abnormal conditions like fault. The proposed secondary controller enables the microgrid system to operate in a stable region. The outcome analysis demonstrates how hierarchical control systems can improve the system’s transient stability during a three-phase fault. The simulation results demonstrate how well the suggested secondary controller restores voltage and frequency irregularities brought on by the primary control. It is concluded that the simulation results demonstrate the effectiveness of the suggested methodology, both for the two mode transition formulations that are described and for rapid changes in load that compare favorably to the current control method.
Acknowledgments
The author extends their appreciation to the Deanship of Scientific Research at King Khalid University, Saudi Arabia for funding this work through the Research Group Program under Grant No: RGP 2/88/44.
Conflicts of Interest
The author declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- Guerrero, J.M.; Kandari, R. "Microgrids Modeling, Control, and Applications," Academic Press, pages: 268, ISBN: 9780323854634, 1st Edition - October 21, 2021.
- Farhangi, H.; Joos, G. "Microgrid Planning and Design: A Concise Guid," Wiley-IEEE Press, Pages 256, ISBN 9781119453505, 2019.
- Ren, L.; Zhang, P. "Generalized Microgrid Power Flow," in IEEE Transactions on Smart Grid, vol. 9, no. 4, pp. 3911-3913, July 2018. [CrossRef]
- Agundis-Tinajero, G.; Segundo-Ramírez, J.; Visairo-Cruz, N.; Savaghebi, M.; Guerrero, J.M.; Barocio, E. “Power flow modeling of islanded AC microgrids with hierarchical control. International Journal of Electrical Power & Energy Systems 2019, 105, 28–36. [Google Scholar]
- Keerthana, M.; Manoharan, P.S.; Ravi, A. "Design of Control Strategy for Battery-Supercapacitor Hybrid Storage System," 2022 7th International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 2022, pp. 798-803. [CrossRef]
- Singh, P.; Lather, J.S. Variable structure control for dynamic powersharing and voltage regulation of DC microgrid with a hybrid energy storage system. International Transactions on Electrical Energy Systems 2020, 30, e12510. [Google Scholar] [CrossRef]
- Hoang, K.D.; Lee, H.-H. "Accurate Power Sharing With Balanced Battery State of Charge in Distributed DC Microgrid," in IEEE Transactions on Industrial Electronics, vol. 66, no. 3, pp. 1883-1893, March 2019. [CrossRef]
- Kamal, T.; Hassan, S.Z.; Espinosa-Trujillo, M.J.; Li, H.; Flota, V. An optimal power sharing and power control strategy of photovoltaic/fuel cell/ultra-capacitor hybrid power system. Journal of Renewable and Sustainable Energy 2016, 8, 035301. [Google Scholar] [CrossRef]
- Jiang, W.; Zhang, L.; Zhao, H.; Huang, H.; Hu, R. Research on power sharing strategy of hybrid energy storage system in photovoltaic power station based on multi-objective optimization. IET Renewable Power Generation 2016, 10, 575–583. [Google Scholar] [CrossRef]
- Mahmud, M.A.; Hossain, M.J.; Pota, H.R.; Oo, A.M.T. "Robust Nonlinear Distributed Controller Design for Active and Reactive Power Sharing in Islanded Microgrids," in IEEE Transactions on Energy Conversion, vol. 29, no. 4, pp. 893-903, Dec. 2014. [CrossRef]
- Shafiee, Q.; Guerrero, J.M.; Vasquez, J.C. "Distributed Secondary Control for Islanded Microgrids—A Novel Approach," in IEEE Transactions on Power Electronics, vol. 29, no. 2, pp. 1018-1031, Feb. 2014. [CrossRef]
- Lu, X.; Guerrero, J.M.; Sun, K.; Vasquez, J.C.; Teodorescu, R.; Huang, L. "Hierarchical Control of Parallel AC-DC Converter Interfaces for Hybrid Microgrids," in IEEE Transactions on Smart Grid, vol. 5, no. 2, pp. 683-692, March 2014. [CrossRef]
- Savaghebi, M.; Hashempour, M.M.; Guerrero, J.M. "Hierarchical coordinated control of distributed generators and active power filters to enhance power quality of microgrids," 2014 55th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 2014, pp. 259-264. [CrossRef]
- Baghaee, H.R.; Mirsalim, M.; Gharehpetian, G.B. "Power Calculation Using RBF Neural Networks to Improve Power Sharing of Hierarchical Control Scheme in Multi-DER Microgrids," in IEEE Journal of Emerging and Selected Topics in Power Electronics, vol. 4, no. 4, pp. 1217-1225, Dec. 2016. [CrossRef]
- Wu, D.; Tang, F.; Dragicevic, T.; Vasquez, J.C.; Guerrero, J.M. "Autonomous Active Power Control for Islanded AC Microgrids With Photovoltaic Generation and Energy Storage System," in IEEE Transactions on Energy Conversion, vol. 29, no. 4, pp. 882-892, Dec. 2014. [CrossRef]
- Han, H.; Liu, Y.; Sun, Y.; Su, M.; Guerrero, J.M. "An Improved Droop Control Strategy for Reactive Power Sharing in Islanded Microgrid," in IEEE Transactions on Power Electronics, vol. 30, no. 6, pp. 3133-3141, June 2015. [CrossRef]
- Zhao, Z.; Yang, P.; Guerrero, J.M.; Xu, Z.; Green, T.C. "Multiple-Time-Scales Hierarchical Frequency Stability Control Strategy of Medium-Voltage Isolated Microgrid," in IEEE Transactions on Power Electronics, vol. 31, no. 8, pp. 5974-5991, Aug. 2016. [CrossRef]
- Guerrero, J.M.; Chandorkar, M.; Lee, T.-L.; Loh, P.C. "Advanced Control Architectures for Intelligent Microgrids—Part I: Decentralized and Hierarchical Control," in IEEE Transactions on Industrial Electronics, vol. 60, no. 4, pp. 1254-1262, April 2013. [CrossRef]
- Han, Y.; Shen, P.; Zhao, X.; Guerrero, J.M. "Control Strategies for Islanded Microgrid Using Enhanced Hierarchical Control Structure With Multiple Current-Loop Damping Schemes," in IEEE Transactions on Smart Grid, vol. 8, no. 3, pp. 1139-1153, May 2017. [CrossRef]
- Guerrero, J.M.; Matas, J.; de Vicuna, L.G.; Castilla, M.; Miret, J. "Decentralized Control for Parallel Operation of Distributed Generation Inverters Using Resistive Output Impedance," in IEEE Transactions on Industrial Electronics, vol. 54, no. 2, pp. 994-1004, April 2007. [CrossRef]
- "IEEE Standard for the Specification of Microgrid Controllers," in IEEE Std 2030.7-2017, vol., no., pp.1-43, 23 April 2018. [CrossRef]
- La Bella, A.; Cominesi, S.R.; Sandroni, C.; Scattolini, R. "Hierarchical Predictive Control of Microgrids in Islanded Operation," in IEEE Transactions on Automation Science and Engineering, vol. 14, no. 2, pp. 536-546, April 2017. [CrossRef]
- Vasquez, J.C.; Guerrero, J.M.; Miret, J.; Castilla, M.; de Vicuña, L.G. "Hierarchical Control of Intelligent Microgrids," in IEEE Industrial Electronics Magazine, vol. 4, no. 4, pp. 23-29, Dec. 2010. [CrossRef]
- Li, Y.W.; Kao, C.-N. "An Accurate Power Control Strategy for Power-Electronics-Interfaced Distributed Generation Units Operating in a Low-Voltage Multibus Microgrid," in IEEE Transactions on Power Electronics, vol. 24, no. 12, pp. 2977-2988, Dec. 2009. [CrossRef]
- Micallef, A.; Apap, M.; Staines, C.S.; Zapata, J.M.G. "Secondary control for reactive power sharing and voltage amplitude restoration in droop-controlled islanded microgrids," 2012 3rd IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aalborg, Denmark, 2012, pp. 492-498. [CrossRef]
- De Brabandere, K.; Bolsens, B.; Van den Keybus, J.; Woyte, A.; Driesen, J.; Belmans, R. "A Voltage and Frequency Droop Control Method for Parallel Inverters," in IEEE Transactions on Power Electronics, vol. 22, no. 4, pp. 1107-1115, July 2007. [CrossRef]
- Engler, A.; Soultanis, N. "Droop control in LV-grids," 2005 International Conference on Future Power Systems, Amsterdam, Netherlands, 2005, pp. 6 pp.-6. [CrossRef]
- Bidram, A.; Davoudi, A. "Hierarchical Structure of Microgrids Control System," in IEEE Transactions on Smart Grid, vol. 3, no. 4, pp. 1963-1976, Dec. 2012. [CrossRef]
- Fan, B. et al. "A Novel Droop Control Strategy of Reactive Power Sharing Based on Adaptive Virtual Impedance in Microgrids," in IEEE Transactions on Industrial Electronics, vol. 69, no. 11, pp. 11335-11347, Nov. 2022. [CrossRef]
- Ling, Y.; Li, Y.; Yang, Z.; Xiang, J. "A Dispatchable Droop Control Method for Distributed Generators in Islanded AC Microgrids," in IEEE Transactions on Industrial Electronics, vol. 68, no. 9, pp. 8356-8366, Sept. 2021. [CrossRef]
- Sevostyanov, N.A.; Gorbunov, R.L. "Control Strategy to Mitigate Voltage Ripples in Droop-Controlled DC Microgrids," in IEEE Transactions on Power Electronics, vol. 38, no. 12, pp. 15377-15389, Dec. 2023. [CrossRef]
- Alghamdi, B.; Cañizares, C.A. "Frequency Regulation in Isolated Microgrids Through Optimal Droop Gain and Voltage Control," in IEEE Transactions on Smart Grid, vol. 12, no. 2, pp. 988-998, March 2021. [CrossRef]
- Keyvani-Boroujeni, B.; Fani, B.; Shahgholian, G.; Alhelou, H.H. "Virtual Impedance-Based Droop Control Scheme to Avoid Power Quality and Stability Problems in VSI-Dominated Microgrids," in IEEE Access, vol. 9, pp. 144999-145011, 2021. [CrossRef]
- Sharma, S.; Iyer, V.M.; Bhattacharya, S. "An Optimized Nonlinear Droop Control Method Using Load Profile for DC Microgrids," in IEEE Journal of Emerging and Selected Topics in Industrial Electronics, vol. 4, no. 1, pp. 3-13, Jan. 2023. [CrossRef]
- Perez, F.; Damm, G.; Verrelli, C.M.; Ribeiro, P.F. "Adaptive Virtual Inertia Control for Stable Microgrid Operation Including Ancillary Services Support," in IEEE Transactions on Control Systems Technology, vol. 31, no. 4, pp. 1552-1564, July 2023. [CrossRef]
- Wang, K.; Yuan, X. "Stability Analysis of the Virtual Inductance for LCL Filtered Droop-Controlled Grid-Connected Inverters," in IEEE Journal of Emerging and Selected Topics in Power Electronics, vol. 10, no. 3, pp. 2685-2698, June 2022. [CrossRef]
- Cao, W.; Han, M.; Zhang, X.; Guan, Y.; Guerrero, J.M.; Vasquez, J.C. "An Integrated Synchronization and Control Strategy for Parallel-Operated Inverters Based on V–I Droop Characteristics," in IEEE Transactions on Power Electronics, vol. 37, no. 5, pp. 5373-5384, May 2022. [CrossRef]
- Ahmed, M.; Meegahapola, L.; Vahidnia, A.; Datta, M. "Adaptive Virtual Impedance Controller for Parallel and Radial Microgrids With Varying X/R Ratios," in IEEE Transactions on Sustainable Energy, vol. 13, no. 2, pp. 830-843, April 2022. [CrossRef]
- Imran, R.M.; Wang, S. "Enhanced Two-Stage Hierarchical Control for a Dual Mode WECS-Based Microgrid,", Energies, 2018, 11, 1270. [CrossRef]
- Fan, L. Control and dynamics in power systems and microgrids. CRC Press, 2017.
- Li, X.; Wen, C.; Chen, C.; Xu, Q. "Adaptive Resilient Secondary Control for Microgrids With Communication Faults," in IEEE Transactions on Cybernetics, vol. 52, no. 8, pp. 8493-8503, Aug. 2022. [CrossRef]
- Adibi, M.; van der Woude, J. "Secondary Frequency Control of Microgrids: An Online Reinforcement Learning Approach," in IEEE Transactions on Automatic Control, vol. 67, no. 9, pp. 4824-4831, Sept. 2022. [CrossRef]
- Habibi, S.I.; Sheikhi, M.A.; Khalili, T.; Abadi, S.A.G.K.; Bidram, A.; Guerrero, J.M. "Multiagent-Based Nonlinear Generalized Minimum Variance Control for Islanded AC Microgrids," in IEEE Transactions on Power Systems, vol. 39, no. 1, pp. 316-328, Jan. 2024. [CrossRef]
- Talapur, G.G.; Suryawanshi, H.M.; Xu, L.; Shitole, A.B. "A Reliable Microgrid With Seamless Transition Between Grid Connected and Islanded Mode for Residential Community With Enhanced Power Quality," in IEEE Transactions on Industry Applications, vol. 54, no. 5, pp. 5246-5255, Sept.-Oct. 2018. [CrossRef]
- Agyekum, E.B.; Nutakor, C. Feasibility study and economic analysis of standalone hybrid energy system for southern Ghana. Sustainable Energy Technologies Assessments 2020, 39, 100695. [Google Scholar] [CrossRef]
- S. D'silva; Shadmand, M.; Bayhan, S.; Abu-Rub, H. "Towards Grid of Microgrids: Seamless Transition between Grid-Connected and Islanded Modes of Operation," in IEEE Open Journal of the Industrial Electronics Society, vol. 1, pp. 66-81, 2020. [CrossRef]
- Das, S.; Singh, B. "Self-Synchronizing Control Enabling Disruption-Free Operation and Seamless Mode Transitions in Wind–Solar Based Hybrid AC/DC Microgrid," in IEEE Transactions on Industry Applications, vol. 59, no. 4, pp. 4797-4807, July-Aug. 2023. [CrossRef]
- Talapur, G.G.; Suryawanshi, H.M.; Xu, L.; Shitole, A.B. "A Reliable Microgrid With Seamless Transition Between Grid Connected and Islanded Mode for Residential Community With Enhanced Power Quality," in IEEE Transactions on Industry Applications, vol. 54, no. 5, pp. 5246-5255, Sept.-Oct. 2018. [CrossRef]
- Gao, M.; Chen, M.; Zhao, B.; Li, B.; Qian, Z. "Design of Control System for Smooth Mode-Transfer of Grid-Tied Mode and Islanding Mode in Microgrid," in IEEE Transactions on Power Electronics, vol. 35, no. 6, pp. 6419-6435, June 2020. [CrossRef]
Figure 1.
Layout of system under study.
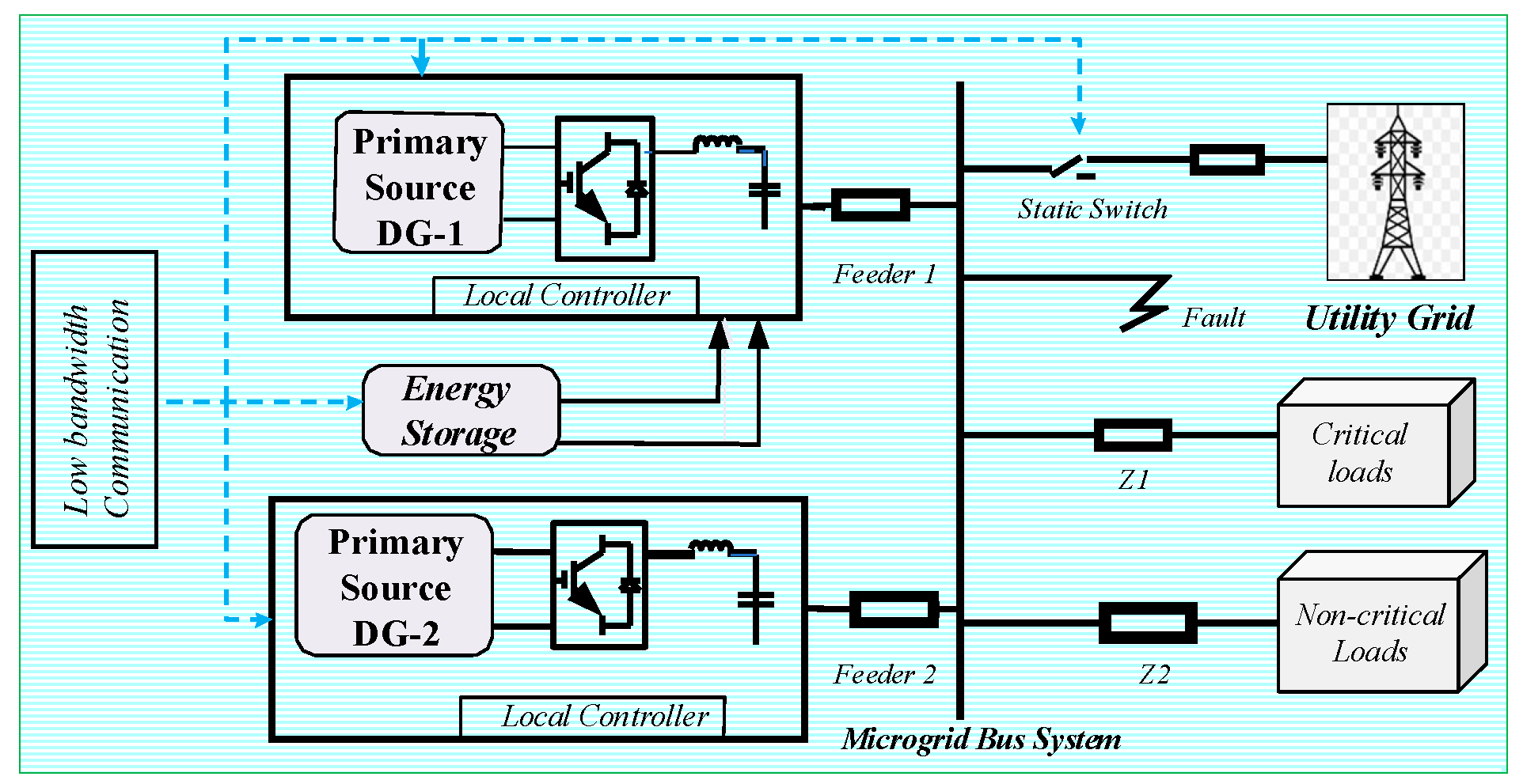
Figure 2.
Control configuration of DGs 1.
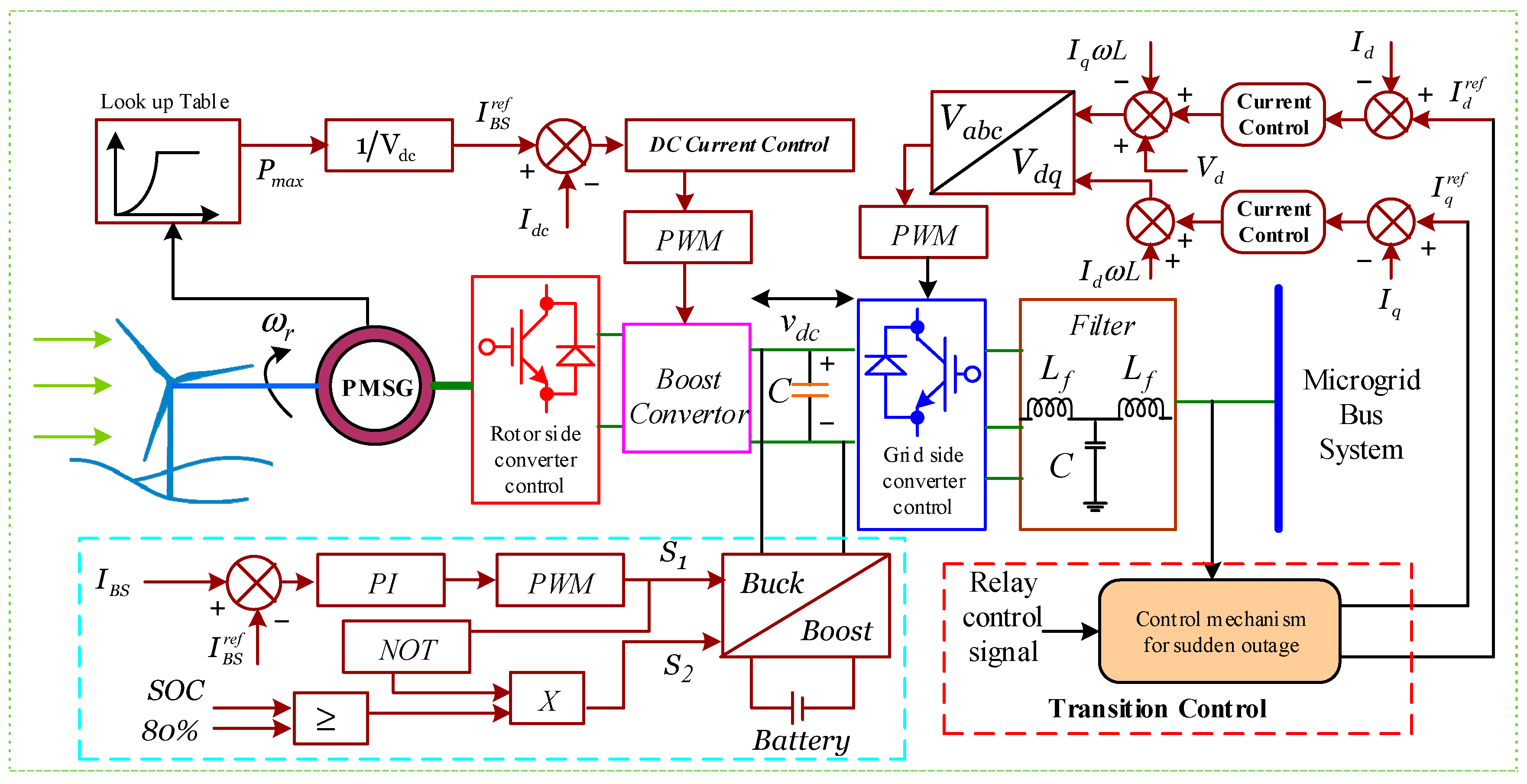
Figure 3.
Configuration control scheme for PMSG-based DG2.
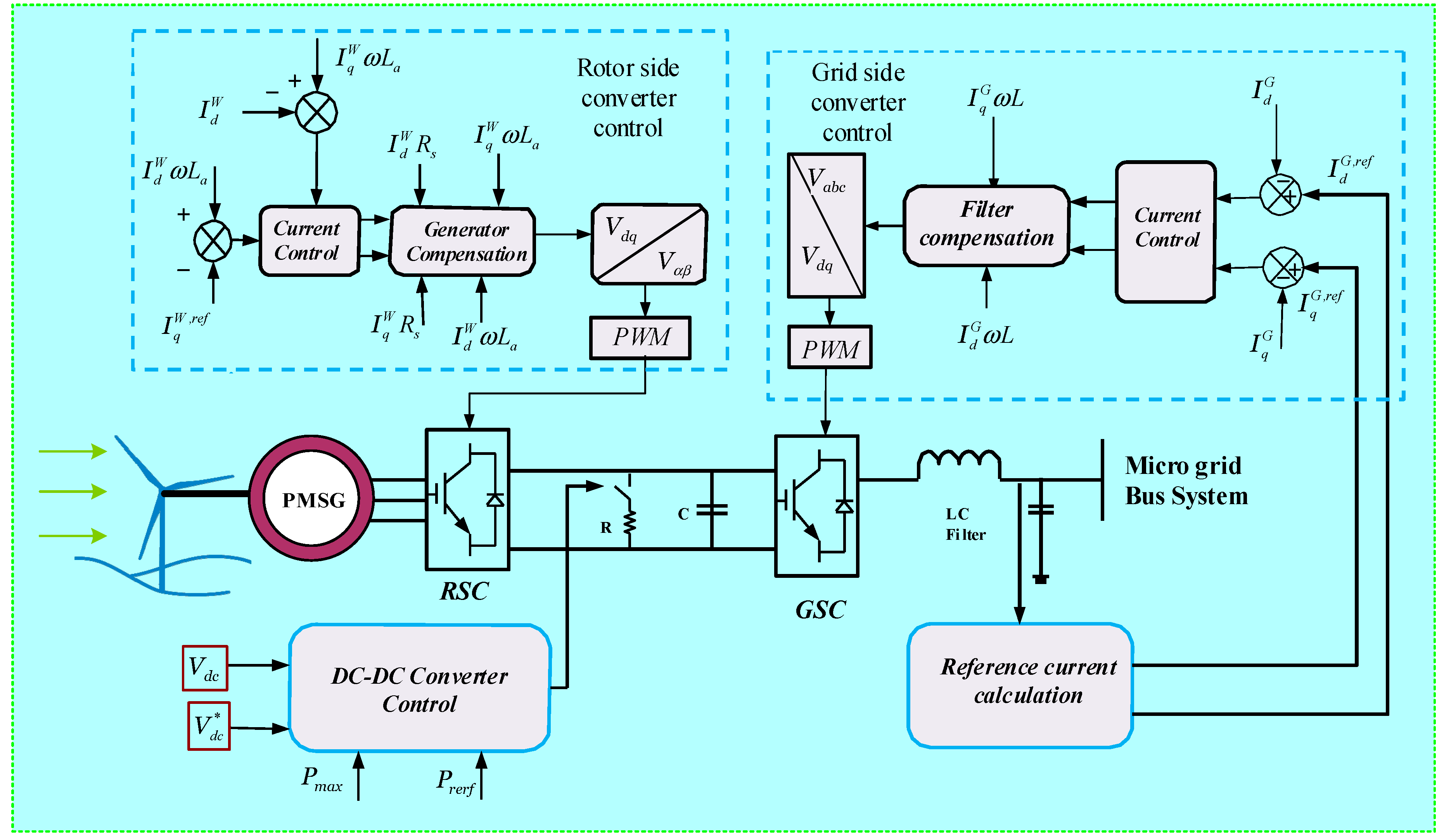
Figure 4.
Various control strategies for DG units.
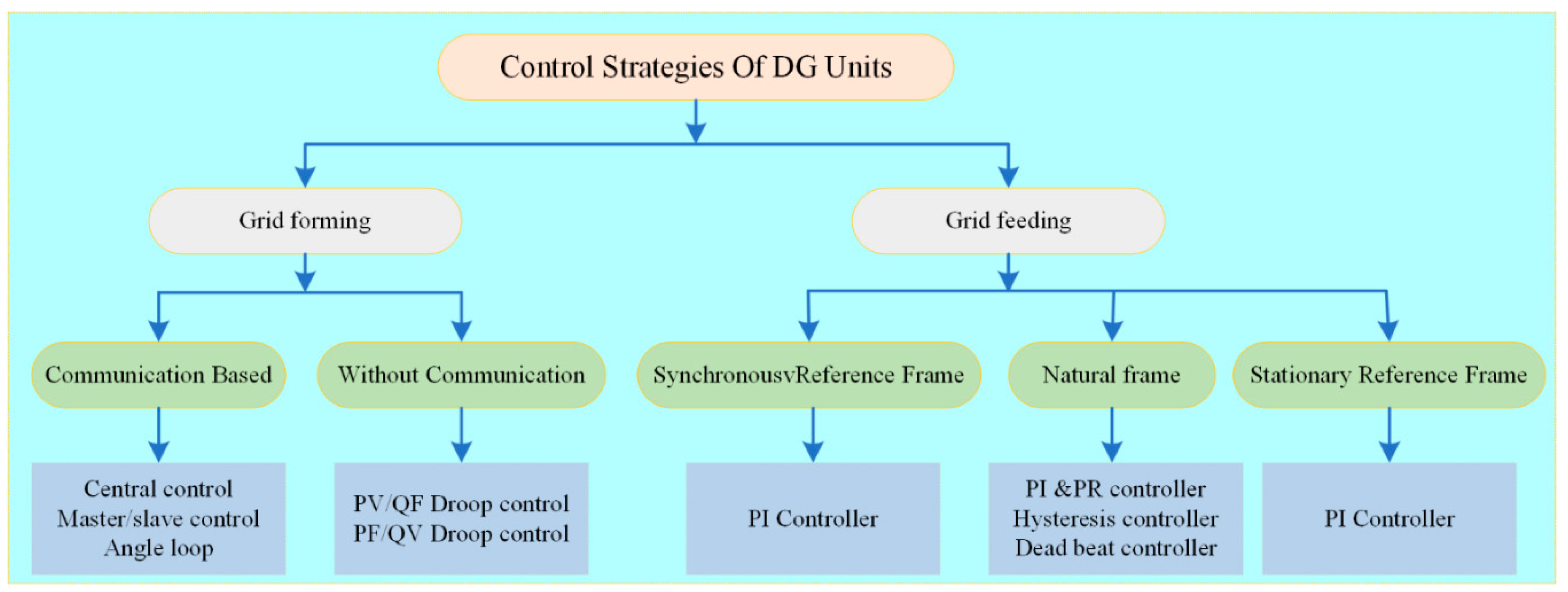
Figure 5.
Virtual impedance-driven droop management.
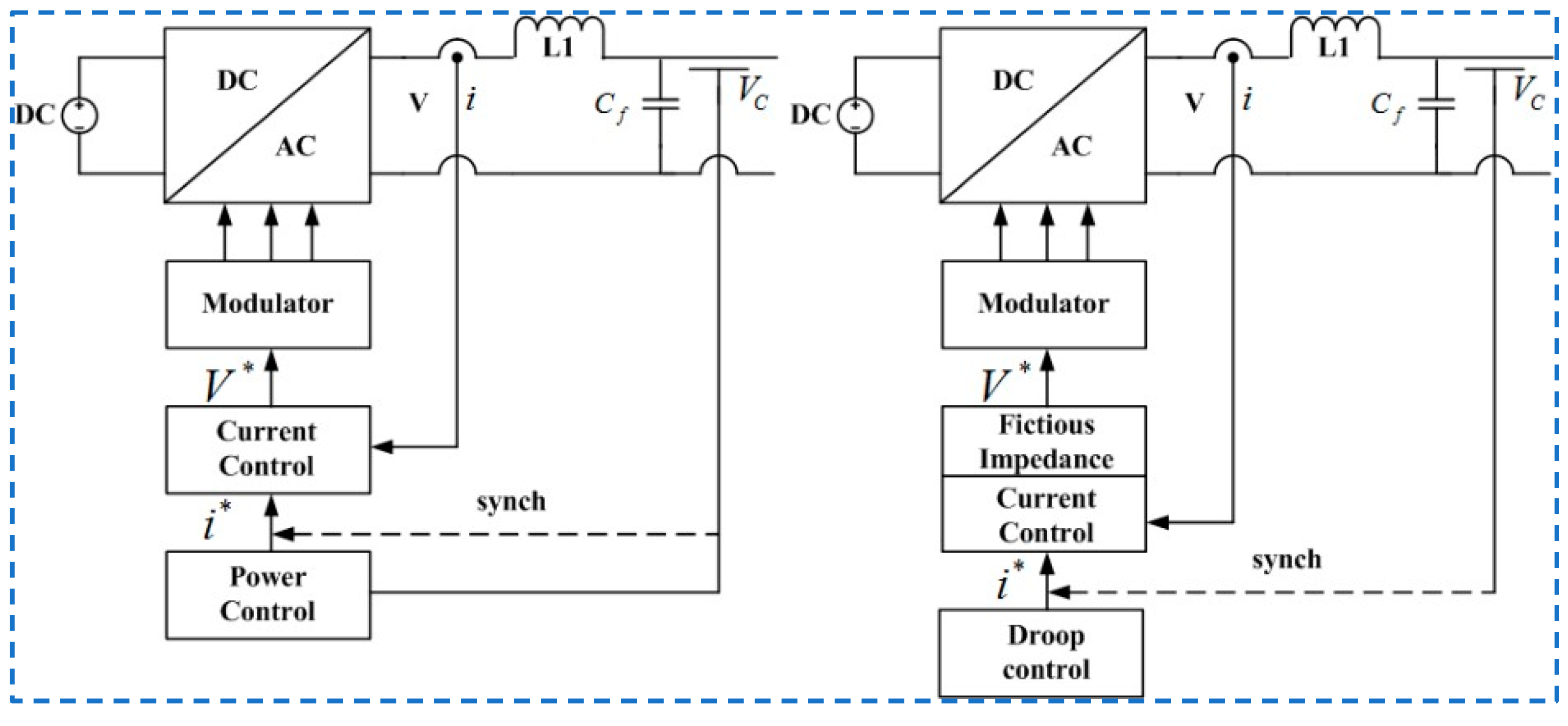
Figure 6.
A microgrid’s proposed two-layer control structure.
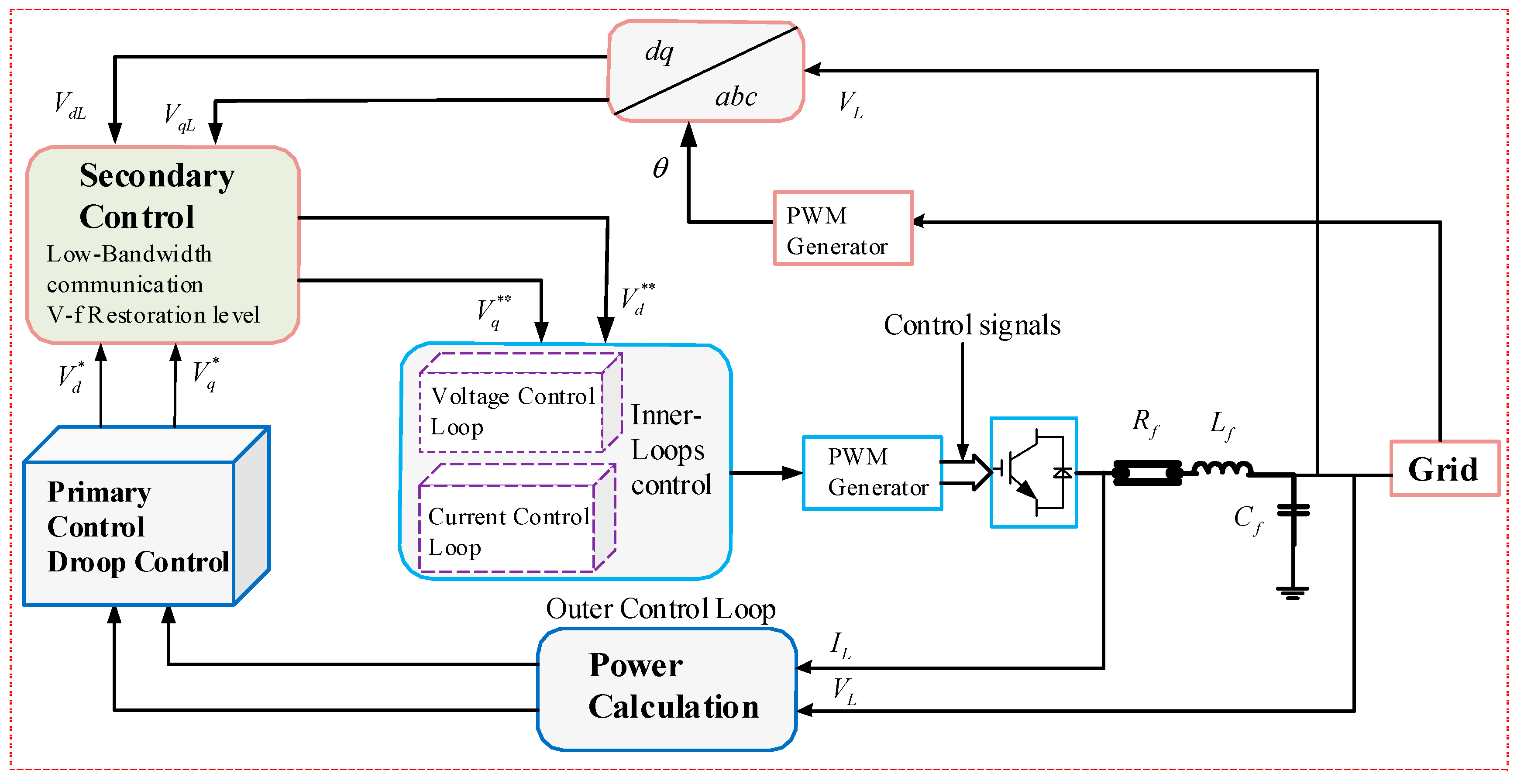
Figure 7.
Diagram in single lines showing a DG unit attached to the PCC bus.
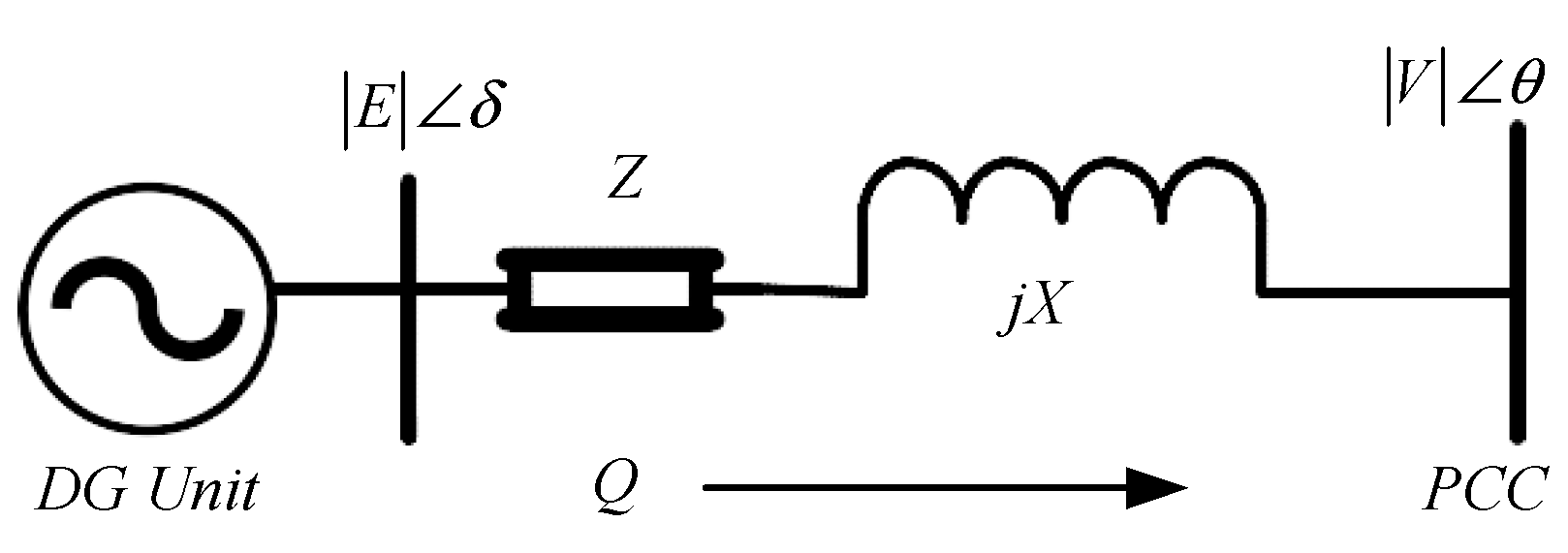
Figure 8.
Utilized droop control strategy.
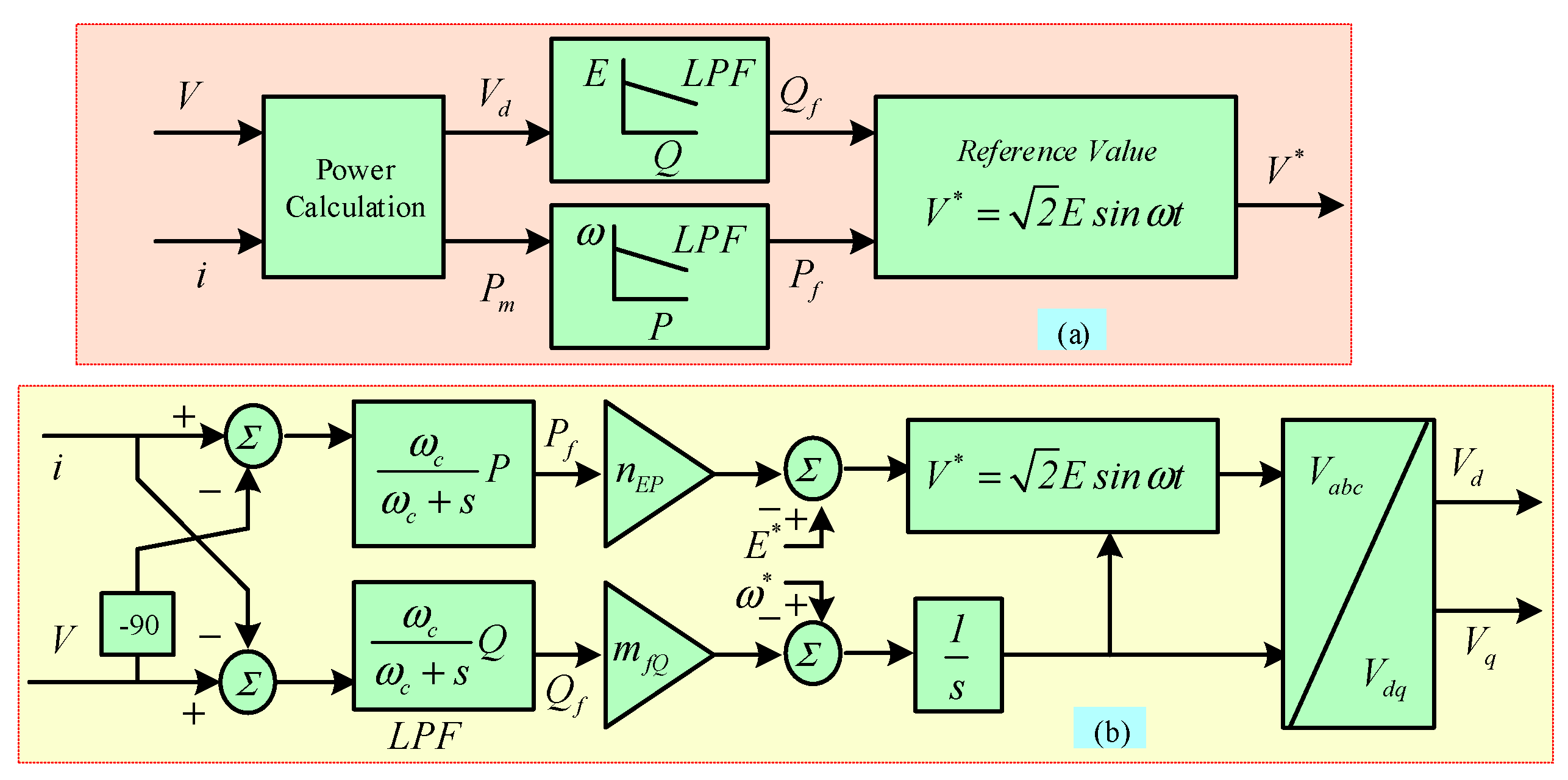
Figure 9.
Secondary control strategy.
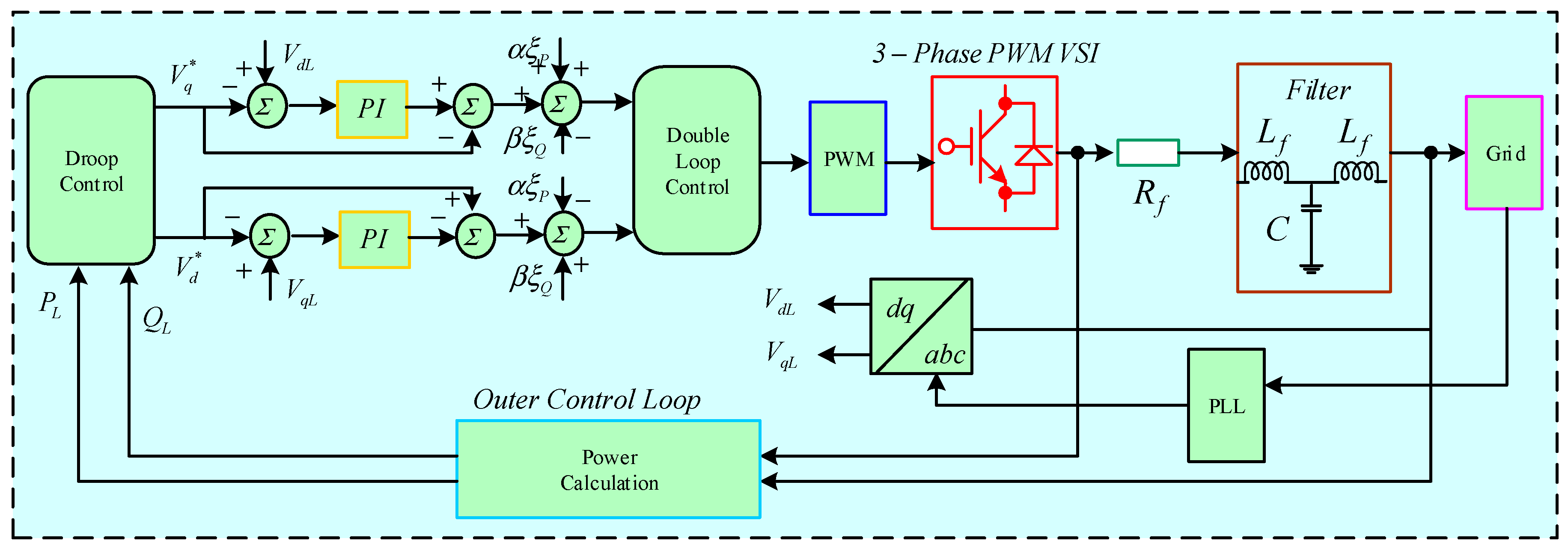
Figure 10.
Operation modes of a microgrid.
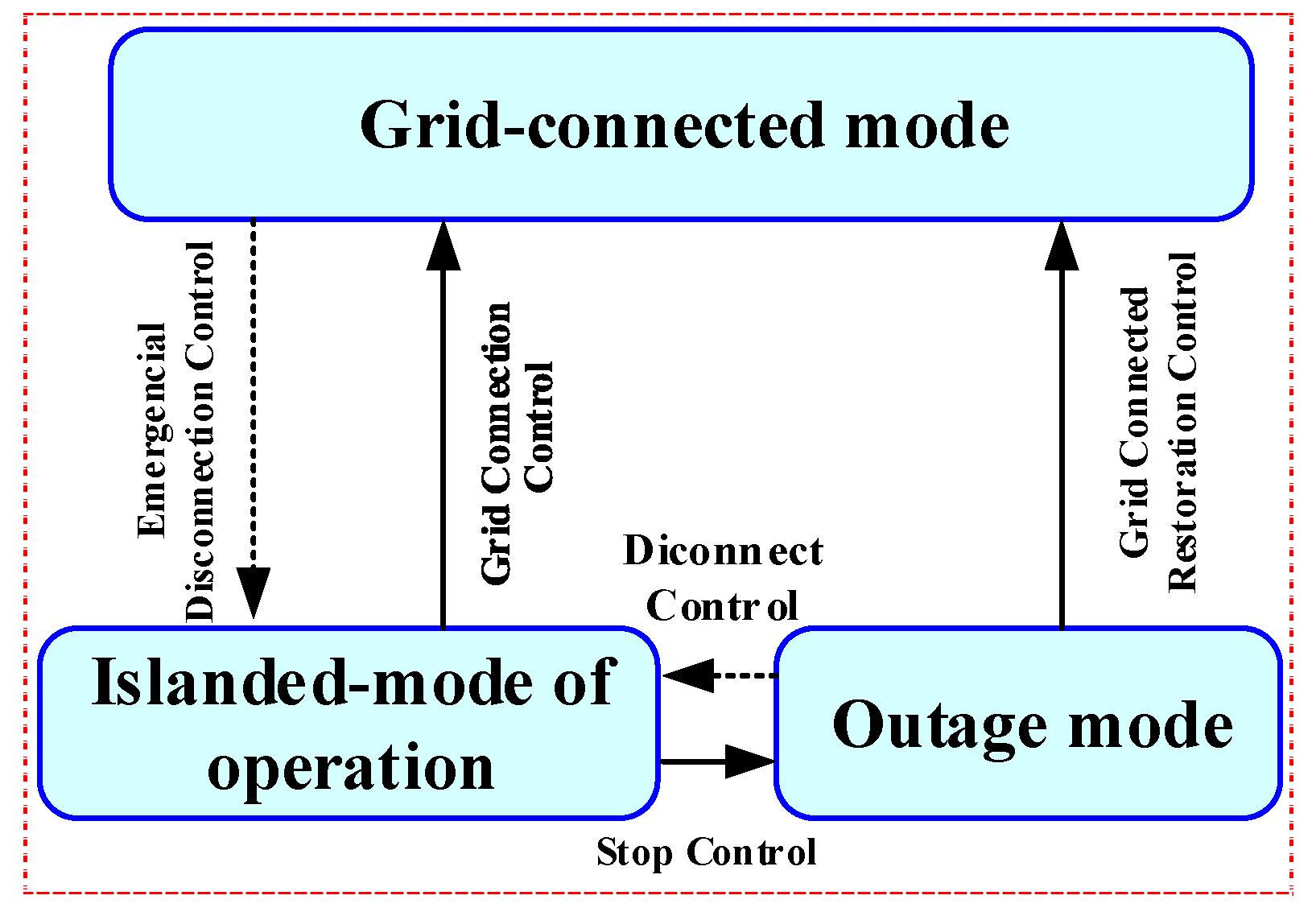
Figure 11.
Transition control for the unplanned outage.
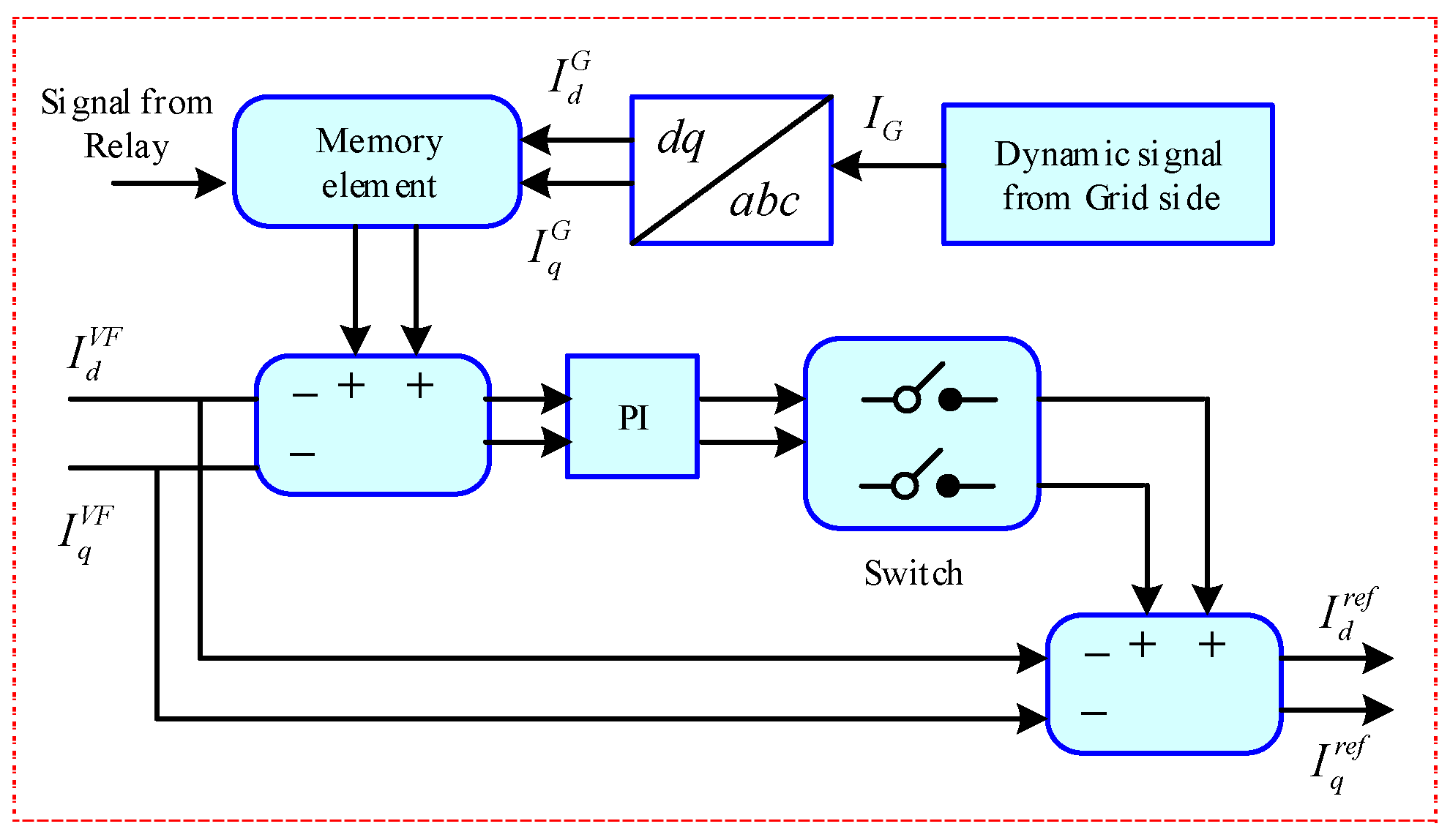
Figure 12.
Real power and reactive power compensator with pre-synchronization.
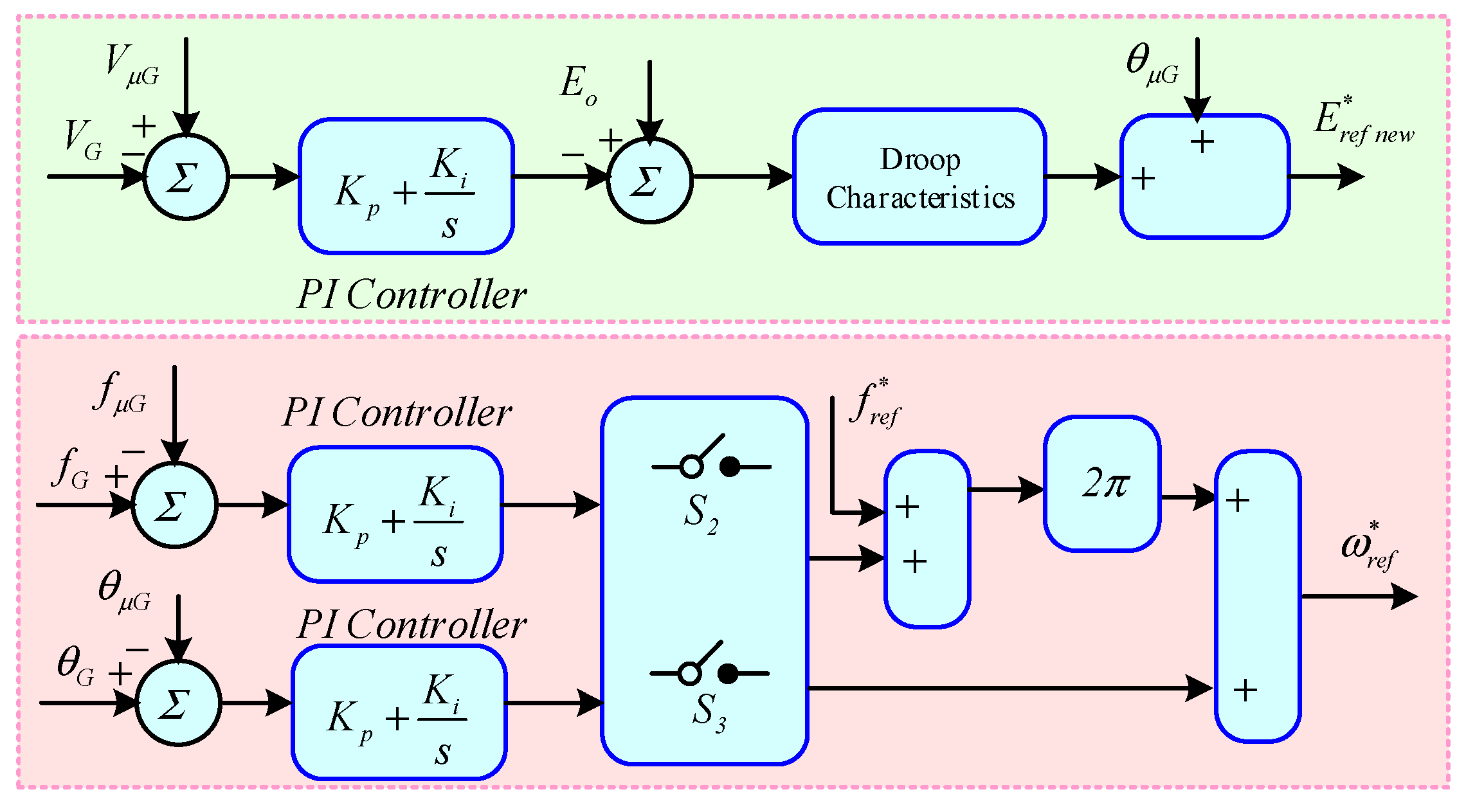
Figure 13.
Seamless transition: (a) Power-sharing of DG1 (b) Frequency response of DG1 (c) Power-sharing of DG2 (d) Frequency response of DG2.
Figure 13.
Seamless transition: (a) Power-sharing of DG1 (b) Frequency response of DG1 (c) Power-sharing of DG2 (d) Frequency response of DG2.
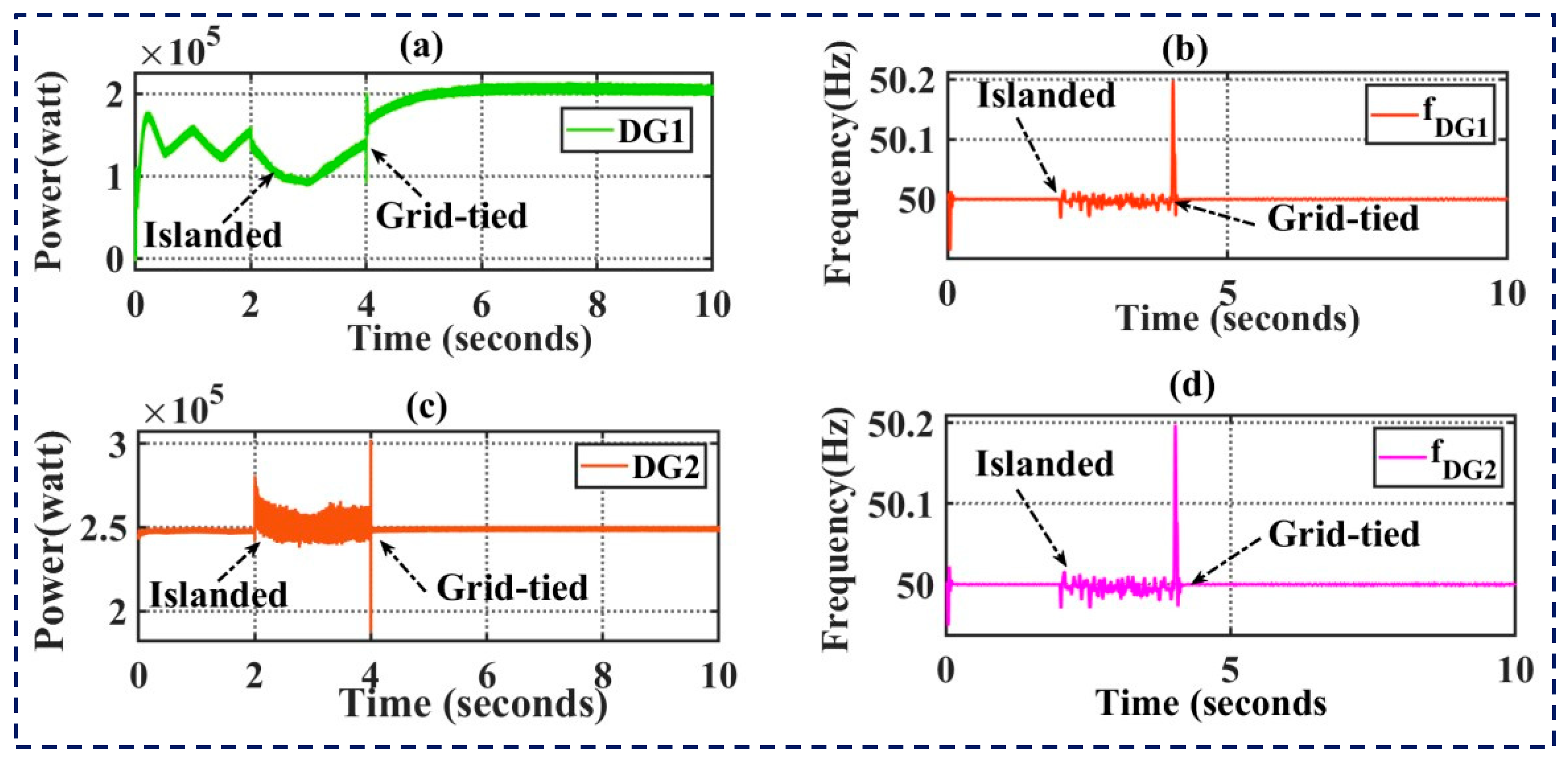
Figure 14.
Restoration’s performance of secondary controller (a) DG1 power flow (b) Voltage response of DG1(c) Current response of DG1 (d) Frequency response of DG1.
Figure 14.
Restoration’s performance of secondary controller (a) DG1 power flow (b) Voltage response of DG1(c) Current response of DG1 (d) Frequency response of DG1.
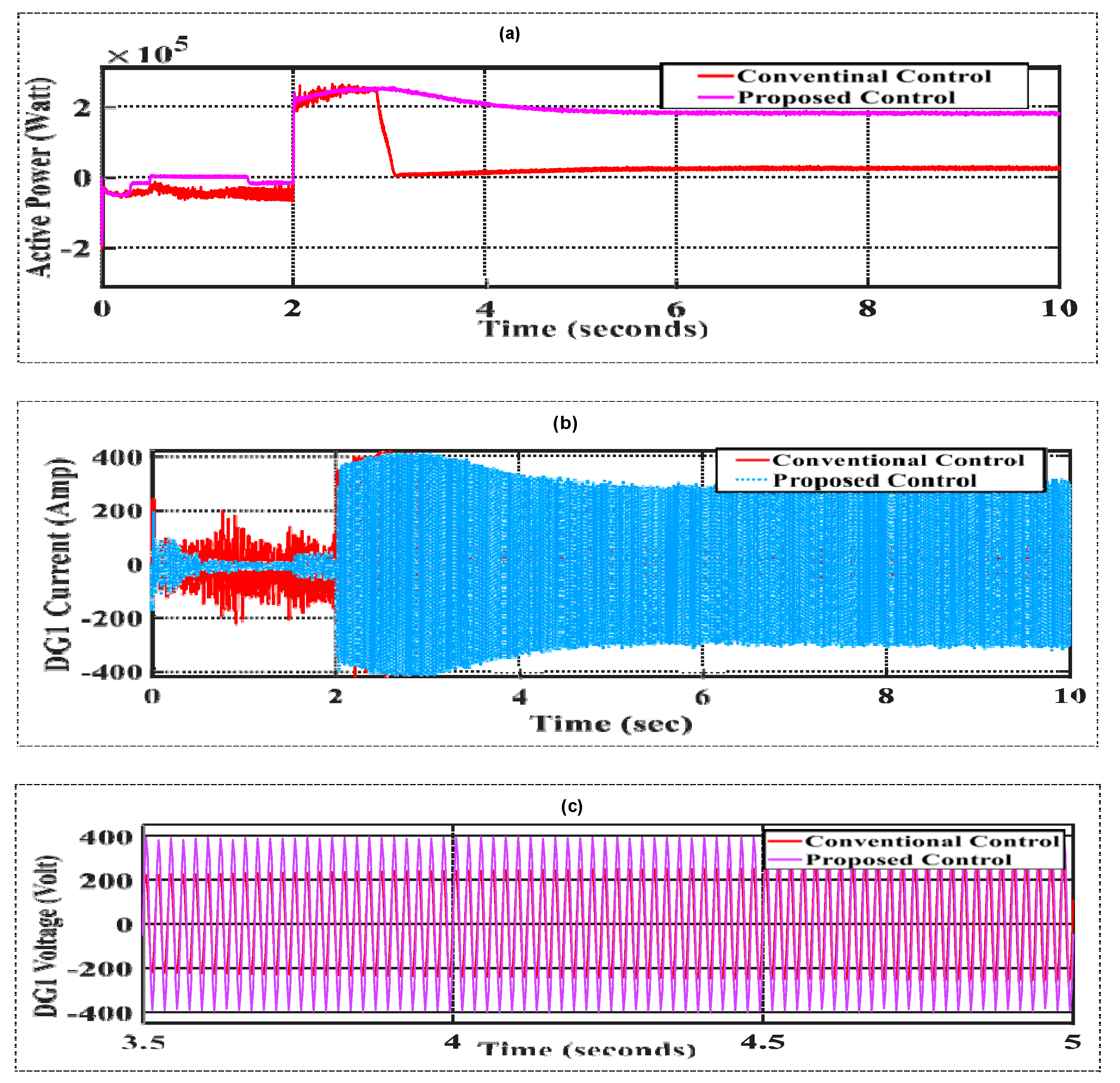
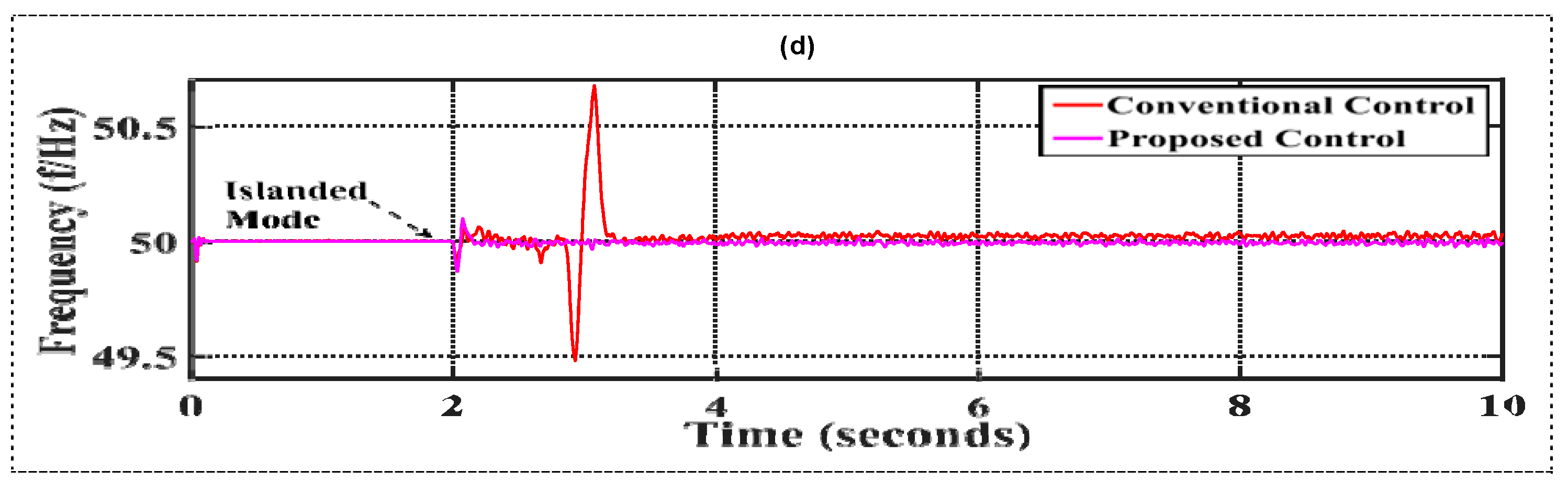
Figure 15.
Restoration’s performance of proposed controller during balanced load change: (a) Power sharing of DGs (b) Load current.
Figure 15.
Restoration’s performance of proposed controller during balanced load change: (a) Power sharing of DGs (b) Load current.
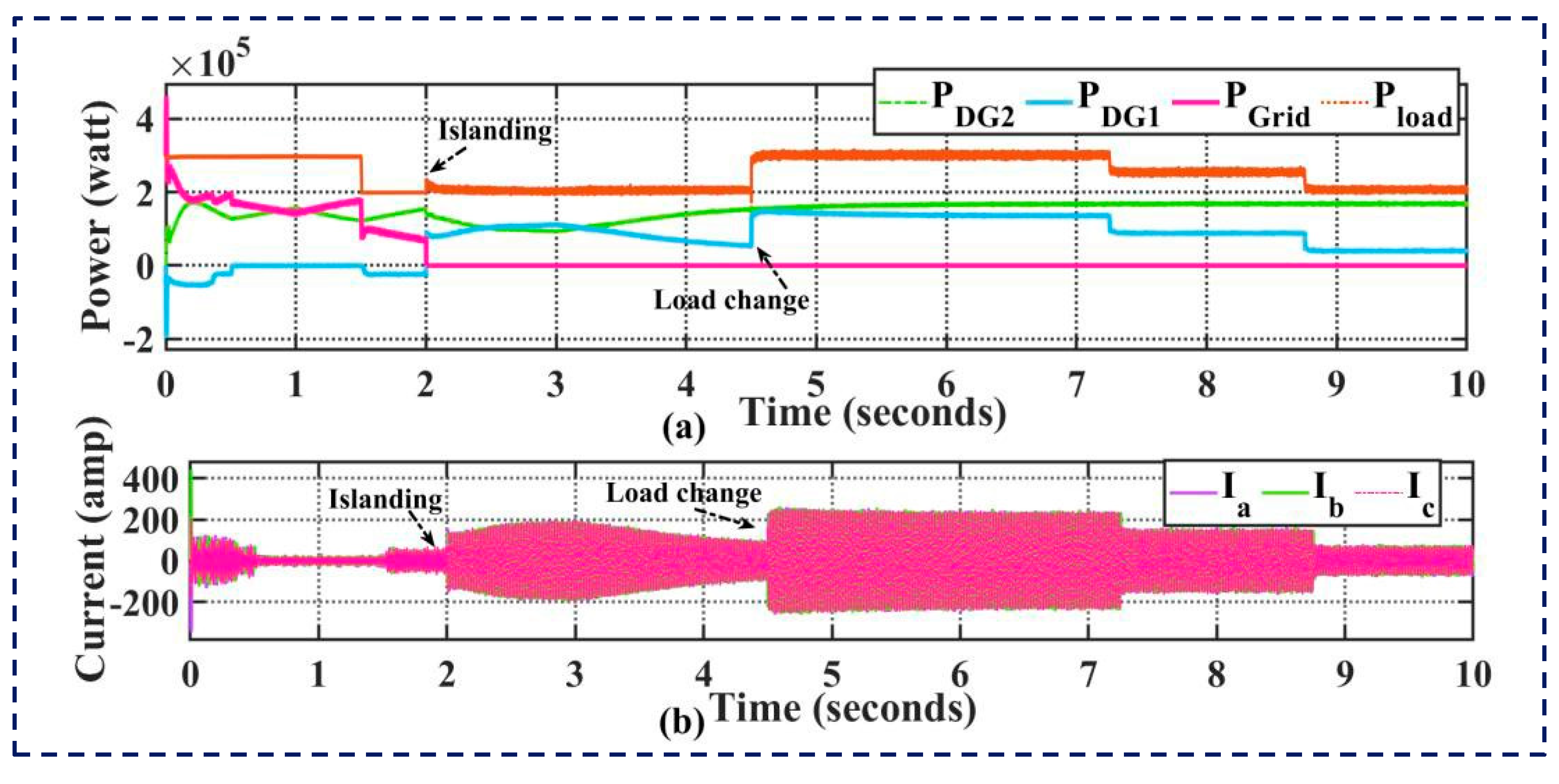
Figure 16.
The suggested controller’s performance restoration during a balanced load change is measured by two factors: load power and load current.
Figure 16.
The suggested controller’s performance restoration during a balanced load change is measured by two factors: load power and load current.
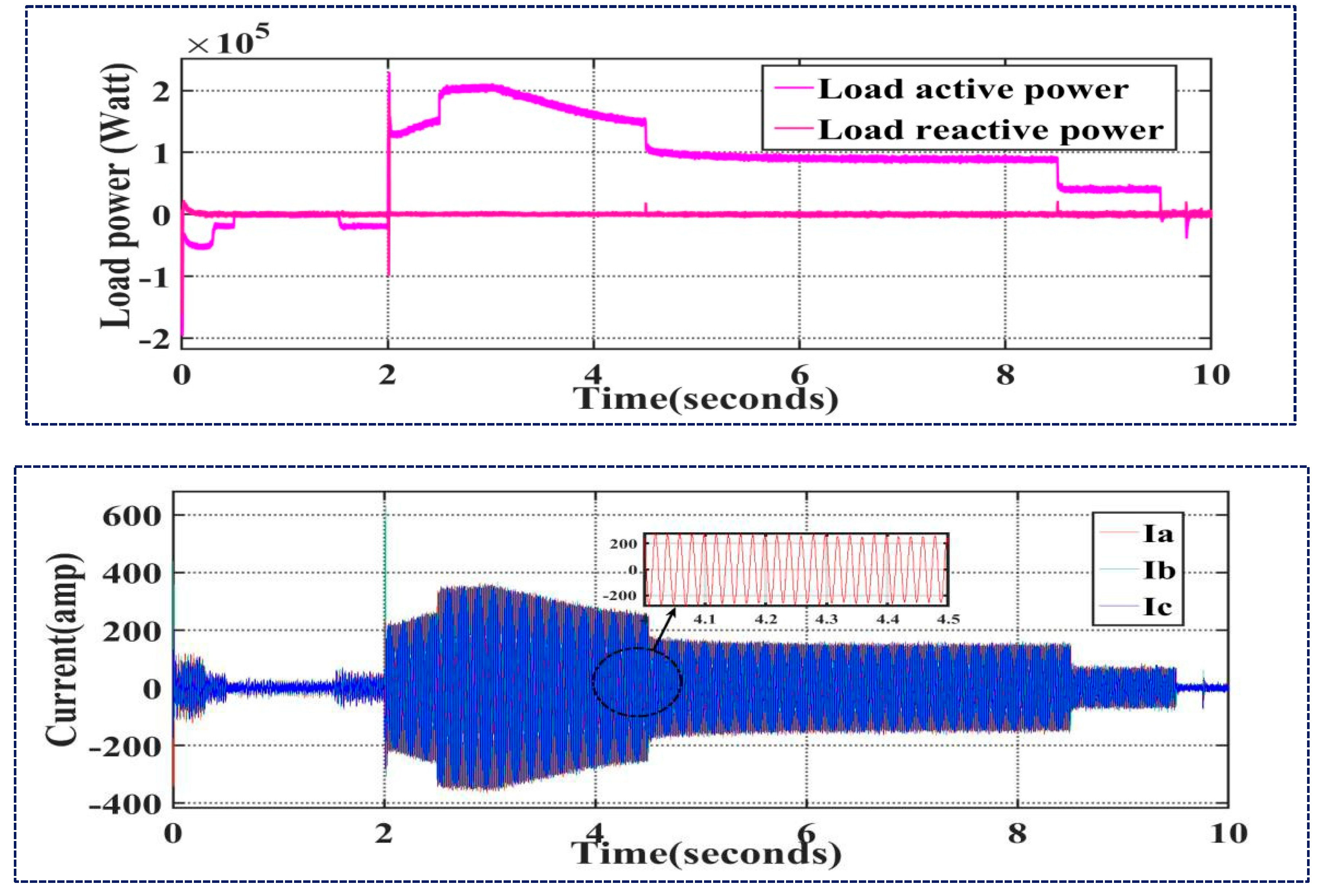
Figure 17.
Restoration’s performance of secondary stage during 3-phase fault: (a) Frequency response (b) Reactive power posture.
Figure 17.
Restoration’s performance of secondary stage during 3-phase fault: (a) Frequency response (b) Reactive power posture.
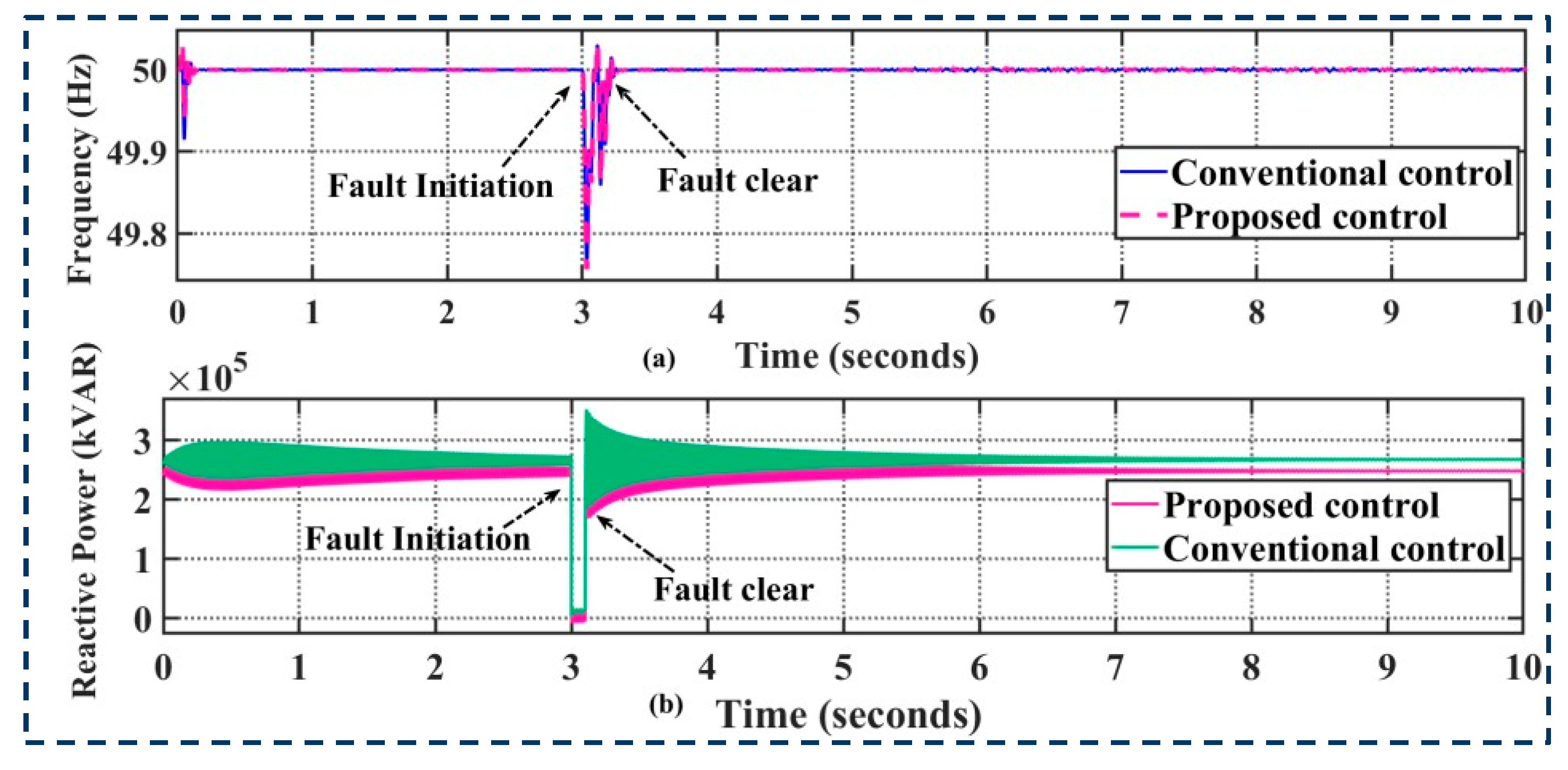
Figure 18.
Restoration’s performance of proposed controller during 3-phase fault: (a) Voltage response (b) Current response.
Figure 18.
Restoration’s performance of proposed controller during 3-phase fault: (a) Voltage response (b) Current response.
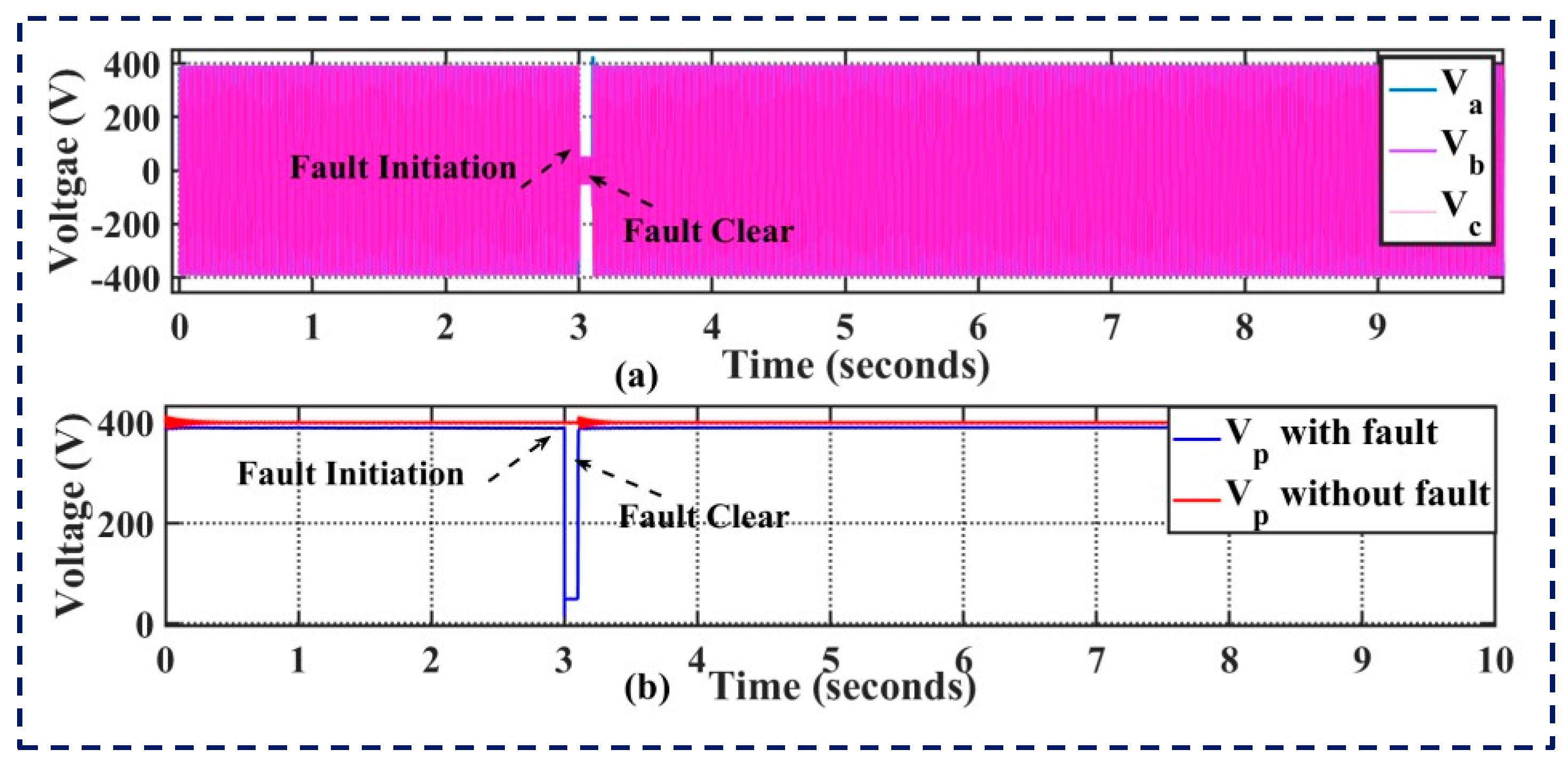

Table 1.
Controller gain parameters.
| Symbol | Value |
| 12 rad/s | |
| 0.0007 V/W | |
| 0.0006 rad/s/VAR | |
| 2.4 | |
| 10 | |
| 1.8 | |
| 390 V |
Table 2.
Sizing parameters of the system under Study.
| System Sizing | |
| Equipment | Values |
| DG1 | 260kVA |
| DG2 | 200kVA |
| Battery | 350 kWh |
| System Parameter | |
| Grid voltage (L-L) | 480 V |
| Grid frequency | 50 Hz |
| DG1 LC filter | 4 mH, 55 F |
| DG2 LC filter | 4 mH, 55 F |
Table 3.
Control parameters of the case study microgrid.
| Parameters | |||
| DG1 | RSC-Current controller-d axis | 3.25 | 39 |
| RSC-Current controller -q axis | 1.7 | 0.66 | |
| RSC-Voltage controller -d axis | 0.84 | 48 | |
| RSC-Voltage controller -q axis | 0.67 | 74.4 | |
| Boost DC current controller | 0.57 | 13.7 | |
| Buck/Boost DC current controller | 4.6 | 61 | |
| DG2 | DG2-GSC-Current controller -Q axis | 5.1 | 82 |
| DG2-GSC-DC voltage controller | 10.6 | 62 | |
| DG2-Chopper voltage controller | 21 | 75 | |
| DG2-MSC-Current controller -D axis | 0.3 | 5.9 | |
| DG2-MSC-Current controller -Q axis | 3.8 | 11 | |
| DG2-GSC-Current controller -d axis | 3.8 | 11 | |
|
Pre synchronization |
control-Voltage component | 0.21 | 3.9 |
| control-Frequency component | 4 | 2.3 | |
| control-Phase angle component | 11 | 8.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



