
Submitted:
08 April 2025
Posted:
09 April 2025
You are already at the latest version
Abstract
Intelligence is a human construct to represent the ability to achieve goals. Given this wide berth, intelligence has been defined countless times, studied in a variety of ways and represented using numerous indicators. Understanding intelligence ultimately requires theory and quantification, both of which have proved elusive. I develop a framework for a Theory of Intelligences (TIS) that applies across all systems from physics, to biology, humans and AI. TIS likens intelligence to a real-time calculus, differentiating, correlating and integrating information and at higher levels, anticipating or predicting future contingencies. Intelligence operates at many levels and scales and TIS distills these into a parsimonious macroscopic framework centered on solving and planning to accomplish goals. Notably, intelligence can be expressed in informational units or in units relative to goal difficulty, the latter defined as complexity relative to an arbitrary standard, such as individual ability or a benchmark. I present general indicators for intelligence applicable across system types, based on goal-relevant information, and a simple expression for the evolution of intelligence traits. I argue that “proxies” such as environment, technology, society and collectives are essential to a general theory of intelligence and future study should address population processes including the emergence and evolution of intelligence traits. I conclude with predictions and implications of TIS.
Keywords:
complexity
; difficulty
; evolution
; information
; prediction
; uncertainty
1. Introduction
The famous quote “information is the resolution of uncertainty” is often attributed to Claude Shannon. What Shannon’s seminal 1948 article A mathematical theory of communication and the above quote indicate is that information is a potential: unresolved order that can be perceived, filtered, deciphered and transformed. Shannon had previously equated information with the term “intelligence” in his 1939 correspondence with Vannevar Bush (Rogers, 1994), though his observation is but one essential part of intelligence, the other being the ability to attain goals in diverse environments (Legg and Hutter, 2007). By associating these concepts, one arrives at a simple, general description of intelligence: the ability to resolve uncertainty, producing a definable result or goal. Indeed, this statement contains two of the oft-cited definitions of intelligence: attaining goals, and the ability to attain goals. My objective is to unpack this general description and to propose an information-based framework to help guide our understanding of intelligence.
Intelligent entities have one or more models of the world (e.g., Albus, 1991, Hawkins, 2021, LeCun, 2022). Simply possessing a model however does not necessarily invoke what most humans would regard as intelligence. Thus, systems from atoms to molecules to gasses, liquids and solids are all governed by physical laws – models of a sort – but these laws are reactive: except under special circumstances, gasses, liquids and solids cannot generate structure spontaneously and they do not have the predictive ability and goal directedness usually associated with (human) intelligence. Nevertheless, the laws of physics and chemistry can be driven to a local reduction in entropy, that is, decreased uncertainty (Brillouin, 1953) and therefore a most bare-bones instantiation of intelligence – the extraction and materialization of information (Landauer, 1991). Natural (non-programmed) physical systems do not make goals, nor can they actively choose among alternative paths or check and rectify errors towards goals. Predicting environments and reducing errors at different organizational levels is part of what differentiates thinking from non-thinking systems such as computers and AI (Tononi and Koch, 2015, Hohwy, 2016). Computers and artificial intelligence – even if capable of impressive feats from a human perspective – have models (e.g., software, algorithms) that are far simpler than biological systems, and humans in particular (Roitblat, 2020, Goyal and Bengio, 2022). Among the features added in the many, huge and fuzzy steps from machine intelligence to human intelligence are dynamic environmental sensitivity and active inference (Korteling et al., 2021).
These and other complexities present a major challenge to developing a general theory of intelligence (Duncan et al., 2017, Barbey, 2018, Stemler and Naples, 2021) applicable to both biological (Epstein, 2016) and artificial (Carabantes, 2020, Bodria et al., 2021) systems. Intelligence theory has largely focused on humans, identifying different milestones from simple reactions through to the more elaborate, multi-level processes involved in thought. Raymond Cattell distinguished acquired and active components of intelligence in humans, defining crystallized intelligence as the ability to accumulate and recall knowledge (much like a computer), and fluid intelligence as abilities to learn new skills and to apply knowledge to new situations (a thinking entity) (Cattell, 1963). Though an oversimplification of the many factors and interactions forming intelligence (McGrew and Wendling, 2010, Flanagan and Dixon, 2014), this basic dichotomy is useful in differentiating the functional significance of storage/recall to familiar situations versus prediction and active decision making when faced with novel circumstances (Parr et al., 2022). The more recent “network neuroscience theory” takes a mesoscopic approach in linking network structure with memory and reasoning components of intelligence (Barbey, 2018), but is impractical for dissecting exhaustive pathways and more efficient short-cuts. Other theories of intelligence have been centered on one or more of system organization, functional processes, emergent behaviors or achievements (e.g., Albus, 1991, Sternberg, 1984, Goertzel, 1993, Legg and Hutter, 2007, Georgiou et al., 2020). Arguably, the main shortcoming of current theory is the view that the reference for intelligence is humans, thus ignoring structural features linking physics, different milestones and scales in biology and artificial or designed systems (Levin, 2022), and, with notable exceptions (Hendriks-Jansen, 1996, Flinn et al., 2005, Roth and Dicke, 2005, Sterelny, 2007, Reader et al., 2011, Burkart et al., 2017, Shreesha and Levin, 2023), ignoring the pivotal roles of history, transmission and evolution in intelligence.
I develop the idea that intelligence is a fundamental property of all systems, and can be categorized in a small number of distinct, distinguishing forms. Previous research has explained intelligence in layers, levels or hierarchies (e.g., Albus, 1991, LeCun, 2022, Spearman, 1904, Carroll, 1993, Conrad, 1996, Adams et al., 2012, Deary, 2014, Chollet, 2019, Burgoyne et al., 2022, Friston et al., 2024) and although focusing on humans, I employ this idea to account for intelligence phenomena in natural physical systems, biological ones and humans in particular, and artificial and designed systems. I define a system (also referred to as an agent or individual) as an out-of-equilibrium entity, possibly complex (Ladyman et al., 2013), possibly capable of autonomy, that uses external energy sources to maintain or lower the entropy of structure, function or behavior, and/or of one or more external systems or objects (Brooks et al., 1989). Generic examples include development, obtaining resources, reproducing, and maintaining homeostasis. When a system uses free energy to generate (and eventually maintain) order, it does so through intelligence embedded in the genotype, (extended) phenotype, or actively expressed by the entity (Odling-Smee et al., 2013).
The framework for a Theory of Intelligences (TIS) connects several concepts and is developed in three parts, starting with temporal goal resolution, then recognizing challenges and micro-, meso- and macroscopic abilities, and finally accounting for system-life-long changes in intelligence and transmission through time, including the Darwinian evolution of intelligence traits. The key advances of TIS are (1) proposing information as the unit for intelligence; (2) the partitioning of intelligence into local (“solving”) and beyond-local (“planning”) strategies; (3) distinguishing challenges in the forms of non-mutually exclusive goal novelty (never before encountered) and surprisal (improbable); (4) recognizing not only the core system, but extra-object spaces, including past sources, present proxies (i.e., any support including extrinsic systems), environments, individual system history, present and near-future transmission, and longer-term evolution.
As a start towards a formalization of TIS, I present descriptions based on the quantifiable system features of solving and planning, difficulty, and efficient, accurate and complete goal resolution. Goals may be imposed by necessity, such as survival imperatives, and/or be opportunistic or actively defined by the system, such as preferences, learning new skills, or goal definition itself. Solving and planning have been extensively discussed in the intelligence literature, and the advance of TIS is to begin to formalize their contributions to intelligence and to represent how, together with efficiency, accuracy and completeness, they constitute a parsimonious representation of intelligence. The proposed partitioning of solving and planning is particularly novel since it suggests that paths to a goal not only function to achieve goals, but also may constitute experimentations leading to higher probabilities for future attainable goals and increased breadth to enter new goal spaces, and possibly serving as a generator of variations upon which future selection will act. These experimentations moreover are hypothesized to explain capacities and endeavors that do not directly affect Darwinian fitness, such as leisure, games and art.
My presentation is inspired to some extent by cybernetics and algorithmic intelligence, which evidently apply to certain artificial systems. But as I argue and has been recently discussed (Goyal and Bengio, 2022, Adami, 2023), even if underlying process and structures and observable behaviors differ considerably between biological and current artificial systems, both have in common the dynamics of information (Brooks et al., 1989). I do not discuss in any detail specific natural physical, AI or biological systems. Nor do I present the many theories of intelligence or the many ways to quantify intelligence, the latter for which the recent overview by Hernández-Orallo (Hernández-Orallo, 2017) sets the stage for AI, but also yields insights into animal intelligence and humans. Neither do I discuss in any detail the many important, complex phenomena in thinking systems such as cognition, goal directedness and agency (Goyal and Bengio, 2022, Pezzulo and Cisek, 2016, Babcock and McShea, 2023). I recognize but only address part of the full spectrum of intelligences, including (1) in different systems with different behaviors and goals (natural physical, biological, AI); (2) in different layers of a given system (solving and planning); (3) at different scales (within-individual, individual, collective); (4) at different temporal scales (history, transmission, evolution); problem types (food acquisition, predator avoidance); (5) and intelligence types (emotion, problem solving, athletic, artistic...). Finally and importantly, my approach is to focus on single systems and single goals, and to represent the key notion of “information” as a single, bulk quantity. I leave more empirically-rooted approaches using for example statistical physics to modeling information (Rivoire and Leibler, 2011) for future work.
1.1. The Idea
My argument is that goals and the means to attain them are informational constructs. The “means” are what we usually associate with intelligence, that is, correctly guessing the answer to a hard problem may bring recompense (e.g., survival), but the basis of the answer will not be retained for future reliable use (e.g., its fitness is zero). Thus, when I use the terms goal information or goal complexity below, I am referring to the path to the goal, which may or may not associate with information or complexity in the objective itself (the so-called “depth” (Lloyd and Pagels, 1988). Because the means to attain goals can be complex (modular, multidimensional, multi-scale), two fundamental macroscopic capacities potentially contribute to resolutions. These are: (1) the ability to resolve local uncertainty (“solving”) and (2) the ability to partition a complex goal into a set or sequence of subgoals fostering goal attainment (“planning”) (Figure 1).
Briefly, both solving and planning harness priors, knowledge and skills, but solving focuses on the myopic resolution of manageable, more or less distinct, goal elements, whereas planning is the broader assessment of alternative steps to attain goals. Thus solving and planning contribute to attaining goals, but a different scales. Planning is a manifestation of the “adjacent possible” (Kauffman, 2000), whereby the cost of ever-future horizons is (hyper)exponentially increasing uncertainty. Not surprisingly therefore, planning is expected to require more working memory (and for hierarchical planning, causal representations of understanding) than does solving (Albus, 1991, Duncan et al., 2017, Hommel et al., 2001). Planning could be influenced by a system’s ability to solve individual subgoals (including how particular choices affect future subgoals), though this does not mean that planning is necessarily harder than solving. And excellent solving ability alone could be sufficient to attain goals (i.e., solving is necessary and sometimes sufficient), whereas the capacity to identify the most promising path alone may or may not be necessary and is not sufficient to resolve a goal (Figure 1A). The value added of the latter capacity is increased efficiency, accuracy, precision and completeness (hereafter precision and completeness will usually be lumped into the related term, accuracy), and each of these become more difficult to achieve as goals become increasingly complex and therefore difficult to represent or understand (Dolan and Dayan, 2013) (Figure 1B). Moreover, although efficiency and accuracy are expected to correlate, they could also exhibit allocation tradeoffs, such that, for example, over-efficiency leads to error-prone and therefore inaccurate or partial resolutions. Here, we simplify by assuming these, together with precision, correlate, and constitute a measure of achievement (or payoff, fitness).
Based on the above observations, a sequence in the evolutionary emergence of intelligence must begin with the capacity to resolve uncertainty (solving) and thereafter possibly expand into prediction of the relevance of alternative informational sets or sequences (planning). As discussed below, this is the basis for evolutionary reasoning to contribute to explaining differences in intelligence capacities between individual systems (trait variation, environment) and across system types (phylogeny), with natural physical systems (e.g., crystal formation) at the base and a hypothetical hierarchy in complexity as one goes from artificial (and subdivisions) to biological (and subdivisions) to human. I stress that partitioning systems in intelligence classes does not signify differences in performance (quality, value, or superiority). Rather, it relates to how these different systems adapt to their particular spectrum of environmental conditions and goals. Differences in the amplitude and spectrum of intelligence traits are therefore hypothesized to reflect differences in the intelligence niche, that is environments, capacities and goals relevant to a system (e.g., Burkart et al., 2017, Godfrey-Smith, 2002, Pinker, 2010) presently or in the near future (Figure 2).
Key to my idea is that selection, fitness, information, complexity, entropy, uncertainty and intelligence are interrelated. There is abundant precedent for such associations, going at least back to Shannon (Shannon, 1948, Shannon and Weaver, 1998), based on comparisons and analysis between subsets of these six phenomena (e.g., Adami, 2023, Rivoire and Leibler, 2011, Gottfredson, 1997, Donaldson-Matasci et al., 2010, Frank, 2012). One of my objectives is to begin to explore these interrelations, recognizing that an ecological perspective could yield important and general insights. Thus, intelligence crosses ecological scales, for example, from within systems to interactions between systems and their environment (sensing, probing, interacting, experimenting), to (social) interactions in populations of systems. Scales and the orthogonal concept of levels (or layers) within systems introduce notions of complexity, that is, the depth and heterogeneities in the structure and function of the system (Lloyd and Pagels, 1988, Collier and Hooker, 1999). I hypothesize that the complexification of intelligence across systems is a manifestation of innovations in capacities and more singular transitions in intelligence, that is, from a baseline of the resolution of local uncertainty (all systems), to sequential relations among local uncertainties (most biological systems to humans), to the ability to integrate two or more local uncertainties so as to more accurately and efficiently achieve goals (higher biological cognitive systems to humans) and finally general intelligence in humans. Though largely unexplored (but see Stanley and Miikkulainen, 2004, Baluška and Levin, 2016, Frank et al., 2022, Fields and Levin, 2022), I suggest that the transitions from baseline uncertainty resolution to general intelligence reflect increased solving ability and for more complex goals, hierarchical planning, both requiring augmented existing and novel abilities (see Table 1 for preliminary classifications).
That complexity and intelligence can be intertwined has important implications for explaining structure and function within and across systems. Insofar as systems evolve, so too do the intelligence traits employed to penetrate complexity (e.g., define and realize goals; (De Martino and Cortese, 2023) and contribute to changes in complexity (e.g., generate novel information, structures, transitions in scales and levels), which, in turn, can require greater and different forms of intelligence in order to resolve, and so on, possibly as an auto-catalytic process (Kauffman et al., 2007). Goal relevancy includes those actions affecting fitness (i.e., growth, survival and reproduction when faced with challenging environments, including limited resources, competitors and predators), well-being (e.g., sports, leisure, art in humans), or actions with no apparent objective at all. The goal can be within the gamut of previous experiences or an extension thereof, or be novel but realizable at least in part, despite its difficulty. To the extent that the universe of relevant, feasible goals is diverse, one expectation is that intelligence traits will not only evolve to improve fitness in existing niches, but also extend into new intelligence niches, which may or may not be more complex than existing ones (Figure 2) (for ecological niche concepts see Chase and Leibold, 2003).
In sum, we need a theoretical framework that recognizes the close interconnections between uncertainty, information, complexity and intelligence, and is built on ecological and evolutionary principles.
1.2. A Basic Framework
The above discussion equates intelligence with a system (or a collection of systems) engaging in a reactive challenge or a proactive opportunity, and doing one or more of sensing, extracting, interpreting, manipulating, transforming and assembling information, and rendering it in a different, possibly more complex form. (Note that below I distinguish reaction from active engagement, but more realistically the latter will include the former). An example of a complex finality is the structure of an architecturally novel, high-level functioning business center. An example of a simple goal outcome is to win, lose or draw in the game of chess. Both examples may have complex paths (requiring intelligence) despite differences in the information contained in their finalities.
Sensing, extracting, interpreting, experimenting, transforming and assembling – characteristic of biology and to a certain extent AI – employ logical associations (Albus, 1991, LeCun, 2022, Goyal and Bengio, 2022, LeCun et al., 2015) and as such, abstractly, they differentiate, correlate and integrate existing and new goal-useful information. This involves amassing and deconstructing complex and possibly disjoint ensembles, identifying their interrelationships, and reconstructing the ensembles and existing knowledge as goal-related information, so as to infer or deduce broader implications leading to a resolution (Goyal and Bengio, 2022, Adami, 2023, Botvinick and Toussaint, 2012). Thus, metaphorically, intelligence is an operator or a calculus of information.
The above coarse-grain perspective emerges from more microscopic, fine-grained levels with what are often viewed as traits associated with humans such as reasoning, abstraction, generalization and imagination. Unfortunately, there is no (single) objective way to represent these and other more microscopic features of intelligence and their interrelationships (e.g., Albus, 1991, Adami, 2023, LeCun et al., 2015, Rosen, 1958, Maturana, 1980, McCarthy et al., 2006, Gershman et al., 2015, Scholkopf et al., 2021). Thus, to be manageable and useful, it is my view that a theoretical framework of intelligence needs to begin at higher-level macroscopic concepts. To accomplish this, I start by developing a series of increasingly complete conceptual definitions. Consider the following keyword sequence for intelligence:

Despite overlap between these descriptors, A makes plain the temporal and dynamic nature of intelligence. The process requires integrating previous history, acquired information in the forms of priors and experience, including knowledge and skills, and the use of current data and information in an internal world model towards a future goal or in reaction to a challenge, producing a result. Key is the manipulation and application of raw data and more constructed information towards an objective. In what follows, I will focus on intentional goals, but the theoretical development is general to both reaction and intention. Furthermore, the quantitative definitions (“indicators” or “indices”) below are simple macroscopic representations of complex processes and behaviors, but nevertheless in being based on the general notions of information and entropy, can apply broadly across systems (e.g., in biology (Adami, 2024).
To integrate the above elements into a general schema we first focus on the core processing module:

System B is simple but general. If B is a mere reporter, then it simply uses input to find output from an existing list, or Goal → Result. If a system has more elaborate capacities, then may be characterized by signal processing, simulation, interpretation and eventual reformulation of the problem, followed by engagement in the decided method of resolution to , including prediction and checking for errors (LeCun et al., 2015). This more elaborate system then decides whether to go back to and possibly re-examine what previously appeared to be useless data, or continue on and render a result. Ultimately understanding intelligence in B requires we have representations of its inner workings (Collier and Hooker, 1999, Rosen, 1986, Cronin et al., 2006).
We can further extend B to how information is accessed, processed and used towards a goal:

The main addition is that both and are conditional on priors, knowledge and skills. In humans, necessities such as food and shelter impose on lower-level priors (e.g., reactions to hunger and fear; notions of causality), whereas opportunities such as higher education and economic mobility require high-level priors (e.g., causal understanding, associative learning, goal directedness) (Chollet, 2019)). The contingencies of goals and paths on information in the forms of priors, knowledge and skills highlight the temporal process nature of intelligence that is central to the framework proposed here.
Finally, we can modify C to account for error-checking and prediction, that is, feedbacks and feedforwards in how information is marshaled towards goal resolution:
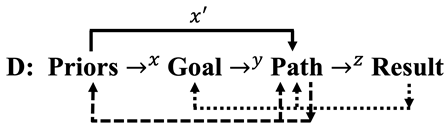
The dotted lines indicate how results can reinforce future paths for current goals and introduce novel set-points for future goals. Similarly, the dashed lines indicate how path experimentation (model flexibility, recombination of concepts) could influence future paths and knowledge and skills. Even if more realistic than the sequences in A-C, these additions are still massive oversimplifications of the sophistication of informational dynamics in artificial and particularly in biological systems. Thus, for humans, these feedbacks and feedforwards could reflect the ability to reflect on past actions and correct mistakes. D simply makes the point that intelligence is a dynamic process with loops in the form of negative feedbacks (comparisons) and feedforwards enabling purpose and goals (Rosen, 2012, Wiener, 1948). Information change is a central feature of TIS and as developed below, important in describing differences in information processing among system types, including natural physical, biological, and artificial.
The above descriptions of temporal sequences say little about system features associated with goal definition and those promoting goal attainment. Despite considerable discussion (e.g., Albus, 1991, Goyal and Bengio, 2022, Cattell, 1963, Spearman, 1904, Chollet, 2019, Adami, 2023, LeCun et al., 2015, Gershman et al., 2015, Brooks, 1991, Kabadayi et al., 2018, Wang, 2019) there is no consensus on a process-based theory of intelligence, neither for biological divisions (Levin, 2022, Baluška and Levin, 2016, Lyon, 2020), nor for artificial systems (Goertzel, 1993, Adams et al., 2012, Friston et al., 2024, Roli et al., 2022). This state of affairs stems in part from the lack of agreed first principles for candidate features and the ill-defined conceptual overlap among various traits influencing intelligence. A way forward is a more inclusive framework based on the resolution of information. I recognize that this still falls short of a readily testable framework and rather intend the developments below to stimulate discussion of next steps and refinements.
The TIS framework developed in the next section partitions a system into two main constructs – challenges and abilities. Challenges include (1) how agent capacities compare to goal complexity (difficulty) or novelty (surprisal, difficulty) (Sternberg, 1984) and (2) the capacity to arbitrate the use of stored information (exploitation) versus acquiring additional information (exploration) (Cohen et al., 2007, Mehlhorn et al., 2015, Del Giudice and Crespi, 2018). And to my knowledge not previously discussed, a related tradeoff in humans is between (3) the employment of stored information (crystallized intelligence) versus higher reasoning abilities (fluid intelligence). The basis for this latter tradeoff is costs and constraints in experiencing, learning, and efficiently and accurately storing and retrieving information in the form of knowledge and skills, either alone, together with, or replaced to some degree by fluid abilities such as reasoning and creativity.
Challenges are addressed based on abilities. Previous frameworks of intelligence in humans, biology and AI have emphasized hierarchical structure in abilities (e.g., LeCun, 2022, Spearman, 1904, Carroll, 1993, Conrad, 1996, Deary, 2014, Chollet, 2019), but the framework presented here is unique in distinguishing generic abilities from those actually applied to goals and their occurrence in different system types (Table 1). Generic abilities and goal abilities are each partitioned into multiple levels based on their hypothetical order in evolutionary appearance, that is, the necessary establishment of mechanisms on a given level for the emergence of more complex mechanisms at a “higher” level (Figure 3). For instance, planning manageable sequences of subgoals serves little purpose unless there are existing capacities to solve component tasks along a sequence. Moreover, solving needs references (memory, objects or constructs, error correction) and at higher levels the ability to arbitrate or predict these references and self-assess. An expectation from evolutionary theory (Maynard Smith, 1978) is that costly improvements to higher-level planning lag behind more essential abilities associated with baseline solving. Thus, the hierarchical categorizations in Table 1 are not clear-cut (and solving and planning are discussed in more detail in the next sections). Identifying component levels for various abilities presents a considerable challenge, both because of their subjective nature and since abilities may articulate at more than one level and interact with environmental variables (e.g., affordances, Pezzulo and Cisek, 2016, Roli et al., 2022).
Table 1 also lists system types commonly associated with different abilities. Many exceptions exist, notably in biology, where for example, certain avian lineages and cephalopods match or even surpass some mammals in generic and goal-associated abilities (Emery and Clayton, 2004, Edelman and Seth, 2009, Amodio et al., 2019). There are, nevertheless, regularities that characterize intelligence in the major system classes presented here. Perhaps the most controversial of these are non-living, physical and chemical systems. In such systems, events depend on the actions and influences of laws of physics and interactions with environments (Anderson, 1972, Frenkel, 2015). Natural physical systems do not have “abilities” as such, yet they can reactively assemble and disassemble information based, in part, on the laws of thermodynamics (Kalantar-Zadeh et al., 2024). Thus, at least abstractly, natural physical systems are “able to react”, resulting in informational change.
2. A Framework for a Theory of Intelligences
Theoretical developments to characterize intelligence are found among many disciplines and diverse systems (e.g., Albus, 1991, Sternberg, 1984, Goertzel, 1993, Wang, 2009, Peraza-Vázquez et al., 2021). Explicit frameworks and measures in AI have described processes such as reinforcement learning based on rewards (Legg and Hutter, 2006), temporal sequences from access to priors and accumulating knowledge and skills through to learning (Chollet, 2019), prediction error-checking and correction in achieving goals (LeCun, 2022, LeCun et al., 2015), and reasoning via planning (Hao et al., 2023). These and other recent advances have largely centered on artificial systems, both because of the rapid growth in AI and since these systems are more tractable than biological intelligence (and human intelligence in particular). The descriptive indices presented below, being based on the common currency of information, are sufficiently flexible to apply to a range of biological or AI systems and contexts. The indices accommodate possibilities that goals can be attained with little or no insight, or that intellectual capacities do not ensure goal realization (e.g., Mashburn et al., 2023). The former implies either outside help, luck, goal simplicity, or reapplying knowledge to the same problems.
The above developments set the stage for a framework incorporating temporal, multi-level and multi-scale factors, focusing on how intelligence addresses uncertainty and complexity. I hypothesize that intelligence manifests across the different system types in Table 1 as goal-related information gain relative to extractable information available. I stress that my approach is to describe the outcome of events and not the underlying processes (i.e., abilities in Table 1) driving these events.
Building on the discussion in the previous section, local solving is addressing an arbitrarily small (manageable or imposed) unit of what might be a global objective, an example being single moves in the game of chess. As a goal becomes increasingly complex, multiple abilities will be marshaled in achieving solving, but solving alone may be insufficient to address higher-dimension goals and particularly those where uncertainties themselves unpredictably change (e.g., an opponent in chess makes an unexpected move). To this, uncertainty in achieving high-dimensional goals is reduced through planning. Planning – which appears to be a uniquely highly developed characteristic of humans (Albus, 1991, Sternberg, 1984), but see (Roth and Dicke, 2005, Roli et al., 2022, Smith et al., 2014) – can involve (as does solving), one or more of the non-mutually exclusive capacities of computation, abstract reasoning, anticipation, prediction, mechanistic/causal understanding, and creativity (Table 1). In the chess example, a current move decision is contingent on planning for future moves. Planning contributes to reducing uncertainty and is central to accurate and possibly efficient goal attainment. Efficient and accurate trajectories to goals become more difficult to attain as alternative paths become more numerous, more complex, and require more (limited) energy. In the extreme, non-planned, stepwise, myopic strategies cannot resolve inherent uncertainty in future paths (Kauffman, 2000). As such, the agent assesses the current state of the resolution and the environment and dynamically adapts its future choices (Rosen, 2012, 1991), thereby reducing surprises and achieving more efficient and/or valuable resolutions (Maier et al., 2016, Walker et al., 2013). Planning can also reduce goal difficulty by experimentation (e.g., evaluation of counterfactuals) or engineering the environment, or changing goals themselves on-route, meaning, for example, that satisficing as opposed to goal attainment may emerge as the most intelligent outcome (Simon, 1956, Hayes-Roth and Collinot, 1994, Bossaerts and Murawski, 2017). Moreover, although not explicitly modeled below, depending on the system, environment and goal, solving and planning may each involve some combination of deterministic approaches (e.g., algorithms, computation) and probabilistic affordances (e.g., invention, short-cuts, creativity) (Pezzulo and Cisek, 2016), the latter of which can “rig the jury” (Roli et al., 2022) and to an observer, make hard problems look easy. Finally and importantly, solving and planning are not independent of one another. For example, in reinforcement learning, the system state is influenced by local (solving) value, and this in turn influences possible changes to policy (planning) so as to maximize future return (Sutton and Barto, 2020).
In the intelligence definitions below, I consider a single agent or system addressing uncertainty, either in reaction to a single challenge or to intentionally achieve a single goal. The definitions presented characterize extracted information change, inspired from macroscopic indicators of intelligence in artificial systems (Chollet, 2019). Although not explicit, the indicators could permit en-route change (possibly via self-assessment) via more microscopic abilities, resulting in error-correction, altered planning or even model modification. Indeed, one interesting line for future inquiry is to know to what extent goal resolutions involve self-correction via internalized meta-cognitive processes (e.g., negative feedback) and/or external perturbations to escape rigid heuristics (e.g., use of affordances).
The indices presented below are based on units (e.g., bits) of information, but given their underlying complexity, will not be practical to estimate, particularly for biological systems. They are therefore intended as a start to formalize concepts for a Theory of Intelligences. The indicators define an informational landscape as a set of discrete, possibly dynamically changing, subgoals. Metaphorically, the agent embarks in the landscape, addressing individual subgoals (“nodes”), where the nodes are random variables in an uncertain state and their choices and information resolution reflect underlying intelligence abilities. The nodes sequentially discretize what is in reality a multi-layered (and for some systems, continuous) process. Moreover, the indicators are not explicit in how or why an agent chooses a specific set or sequence of subgoals. That is, alternatives to choices are not recorded and there is no mechanistic insight for choices beyond saying that events can be functions of past and future prospective choices, intrinsic abilities, current contexts and environmental conditions. The terms represent what an agent did and could have done, and thus the indicators are considerable oversimplifications of artificial and especially biological systems. Nevertheless as described below, they reveal some of the important interrelationships and challenges that could contribute to a predictive theory. As above, even if information can be quantified (e.g., test questions with minimal, efficient, logical paths to partial or complete solutions), the indices presented do not explicitly include abilities (Table 1), contingencies (failure, stopping conditions) and dynamics (learning, changing policy or strategy). Moreover, if the agent dies in attempting to accomplish the goal, then although components of intelligence may be tallied for the nodes visited, the ultimate transmission of intelligence traits to others and to future generations could be curtailed.
Below, solving and planning are each represented by a single key variable. For solving it is Un, the useful information acquired at subgoal (node) n towards the ultimate goal or result, whereas for planning it is An, the accuracy and efficiency of the broader scale informational choices (i.e., strategy) to the ultimate goal itself. Nodes (units) form a sequence of subgoals that increasingly approach the ultimate goal if the system better solves and, for a complex goal, plans the sequence. Intelligence minimally requires that goal-relevant information is gained (i.e., uncertainty reduction) at one or more nodes. Monotonic gains in information do not ensure goal attainment and goals can be attained even if information is nil or lost at certain nodes.
2.1. Solving
We assume a goal can be represented by one or more alternative paths, each being a series of nodes (subgoals), and each node composed of potential information relative to the result or ultimate objective. The agent traces a single path and employs unspecified capacities and data to achieve some level of uncertainty resolution, measured as information useful for attaining a goal. The total information at given node n is based on information acquired from previous engaged node(s) and resolution of entropy (i.e., potential information) in the current node. The useful entropy in the current node is conditional on past information (e.g., the current potential information is redundant). The reverse is also possible: the acquired information at a past node can be conditional on future node events (e.g., the new information is superior and supplants existing information). The index below does not explicitly account for these dynamics, but rather tallies the total information in the path once the agent has stopped at n=N.
The solving component of intelligence reflects accuracy, that is the gain in information useful towards goal y:
is a function of agent abilities given environmental conditions (the commonsense notion of intelligence; hereafter the function notation is dropped). Disruptive noise and inhospitable environments could, in principle, result in information loss (time course ii in Figure 1B). Importantly, given possible redundancy or contingency in both useful (numerator) and potential (denominator) information across nodes, goal-related information gained at node n will be a dynamic function of information gained at previous nodes n-1... Note whereas will be a complex function, the set or sequence of is given (i.e., there is no explicit planning; this will be relaxed below). By definition ≥ and therefore approaches 1 as → for all n. is normalized by the number of subgoals N, which does not explicitly account for solving efficiency. Solving efficiency could be incorporated as a first approximation by dividing by the energy invested or time elapsed on each subgoal n.
We can modify (1a) to include the contribution of information at node n useful to goal completion, with the condition :
Note that is an indicator of that part of total goal complexity realized by the agent. can also be interpreted as part of a stopping condition, either an arbitrary goal-accuracy threshold (>) or a margin beyond or below a threshold (-). An example of a threshold is the game of chess where each move tends to reduce alternative games towards the ultimate goal of victory, but a brilliant move or sequence of moves does not necessarily result in victory. Examples of margins are profits in investments or points in sporting events, where there is both a victory threshold (gain vs loss, winning vs losing) and quantity beyond the threshold (profit or winning margin). We do not distinguish thresholds from net performance below, but rather highlight that goal resolution could involve one or both.
2.2. Planning
Solving alone can, but does not necessarily ensure goal attainment (Firestone, 2020). This is because, for example, a system may either (1) correctly execute most of a series of computations, algorithmic functions, or inferences but introduce an error that results in a partial or substandard resolution or no resolution at all, or (2) choose nodes that, taken together, only contain a subset of the information necessary to accurately attain the goal. Either or both can be ameliorated through planning. Planning can involve the set of nodes and/or their sequential order. For some systems, planning can also be dynamically updated when faced with current goal-attainment contingencies. This might involve either adapting the planning strategy and/or modifying foundational internal system models.
We begin by defining planning accuracy and completeness on goal y as the potential goal-related information contained in the actual choices of path nodes relative to the nodal set comprising the maximal potential goal-related information . Maximal information does not ensure goal attainment, that is, for example, a problem may not be solvable based on available information, even if extraction is perfect. Moreover, complex goals may have more than one informational path to their resolution (possibly with different efficiencies). We do not represent such complex landscapes here and rather highlight this realism for future work.
We assume that planning can occur at multiple levels, here for illustration we assume two levels, where nodes at the lower level depend on strategic choices at the higher level. Below, the external summations h=1 to H and =1 to are the actual and maximal upper-level strategic sets, respectively. Similarly, n=1 to and =1 to are lower-level nodal sets. The paths actually taken in h and n space are therefore a consequence of planning. For example, in the game of chess, play epochs (H, ) may be partitioned into opening, middle and end games strategies. Evidently, the lower level (N, ) moves are contingent on opposing player moves and strategy, and higher level strategy may change based on contingencies as well.
Index (2a) can be simplified by assuming that planning occurs at the lower level n,:
A final index for goal accuracy quantifies solving based on no planning (1b), relative to that based on planning if the agent were to follow the maximal potential goal information path.
where .
2.3. Intelligences
Any multifactorial definition of intelligence is frustrated by the arbitrariness of component weighting. In this respect, a central ambiguity is the relative importances of solving, planning, and goal attainment (Kryven et al., 2021). Clearly, each node choice depends to some extent those preceding it and each choice may also depend on predictions of those environmental states not having yet occurred. For illustration of the basic issue, consider two different strategies available to an entity – an efficient one and an inefficient one – each yielding an answer to the same problem. There are two outcomes for each strategy: inefficient strategy, wrong answer (0,0); efficient strategy, but wrong answer (1,0); efficient, correct (1,1); And yes, especially for multiple choice questions, inefficient, correct (0,1). Undoubtedly, (1,1) and (0,0) are the maximal and minimal scores respectively. But what about (1,0)’s rank compared to (0,1)? If a multiple-choice test, then one gets full points for what may be a random guess and (0,1). If the path taken is judged much more important than the answer, then an interrogator would be more impressed by (1,0) than (0,1).
In addition to possible ambiguities between abilities and performance (Firestone, 2020), key abilities themselves may or may not be correlated. Specifically, and are indicators of two complementary forms of intelligence in those systems employing both solving and planning. Although they can each serve as stand-alone assessments, they are ultimately interrelated by , the entropy, or potential goal-useful information content at each node visited. Correlations between and are expected to increase with either few subgoals to accurate resolution, or many simple subgoals. See Section 2.4 for how (1b) and (2b) are linked should planning occur.
Figure 4 shows how an agent’s trajectory through information space hypothetically plots onto a space of achievements. Different nodal paths can produce a similar final outcome (S-C and S-O), and very similar paths can lead to different outcomes (S-B and S-C). Underscoring the importance to intelligence of solving and planning flexibility, one or the other of and might increase, decrease or remain unchanged as the agent proceeds through successive nodes. This relates to the expectation that the most efficient and accurate path (e.g., gradient decent in unconstrained systems) to goal completion will involve the allocation of solving and planning abilities (cf trajectories i or ii vs iii in Figure 1A). Figure 4 also illustrates that solving and planning need not concord (e.g., path S-B in Figure 4). Nevertheless, given likely correlations among intelligence components, we predict that there will be a feasible parameter space for a given agent’s abilities (shaded area, Figure 4). We did not explicitly represent these co-dependencies in the indicators of intelligence and rather recognize that goal complexity will tend to lower overlaps between abilities to solve and plan.
2.4. Composite Indicators
The above discussions and expressions (1a-b) and (2a-c) provide a basis for a framework of intelligences. They characterize two central abilities, solving and planning, but as related above, overall goal performance does not necessarily require both. I propose a general composite index for intelligence based on the assumption that solving is necessary and planning only influences intelligence insofar as it interacts with solving. Noting that when the agent plans, and are equivalent at any node n, and the former can be substituted for the latter in (1b). We thus have a simple expression for the value of intelligence of an agent with capacities x addressing goal y, where capacities match goals as
where for notational simplicity =. Substituting from (1b) and (2b) we have
which can be simplified to
Intelligence is defined by (3c) as the goal-useful information actually gained relative to total potential information under optimal planning. It is interesting that the defining term for planning () drops out of this expression. Rather, planning in expression (3c) is implicitly contained in the choice of nodes n associated with the solving results in the numerator.
Although is relative to potential information, an additional step is necessary to address the issue of subjectivity in indicators of intelligence. That is, the resolution of a given goal may be effortless for one system and effortful for another. Moreover, the resolution of a goal may appear simple to one observer and hard to another. These contrasts – among intelligence as attaining goals regardless of difficulty, intelligence as overcoming difficult goals, or intelligence as the perception by others – are central to the issues of whether intelligence is a property of system performance, performance relative to goal difficulty, and/or the extent to which it is agent- or goal-intrinsic or observer-dependent.
A simple way to incorporate ability relative to challenge is to relate intelligence to goal difficulty. Difficulty can be defined and quantified in many ways (e.g., Beckmann et al., 2017, Pelánek et al., 2022, Benedetto et al., 2023), and we employ the idea that difficulty is intrinsic goal complexity relative to a baseline, for example the abilities of a specific agent to resolve that complexity (see discussion in Chollet, 2019). A hard problem for a given agent need not be a novel or surprising problem for that agent; that is, even if the agent has the familiarity and capacities to solve the problem, considerable work may be required to solve it because of its intrinsic complexity (e.g., a high dimensional Sudoku puzzle).
Intelligence defined as achievement relative to difficulty can be quantified by first proposing an expression for difficulty based on concepts developed above
Moreover, the quantity > 0 is the expected ability of the agent with expertise x to achieve goals in class y. (Note that depending on the context, can also be an estimate of random noise or of a benchmark). All else being equal, will decrease as x and y diverge (i.e., greater novelty). Because actual experience on a goal reduces future surprisal and therefore increases on similar goals, will be challenging to estimate, necessitating for example a subjective, interrogator-based index (Rosen, 1986), or for difficulty averaged over a population, an index based on benchmarked ability (Bodria et al., 2021, Hernández-Orallo, 2017).
Whereas from (3a-b) is an indicator of intelligence based on actual solving and planning, a complementary index based on the notion of difficulty is
Index (3e) is both general and powerful. and are all composed of terms in units of information. By simple inversion of difficulty (3d) we have an expression for the expectation of intelligence for a given level of complexity . The mean and variance in over many similar tasks is a measure of positive impacts of training (e.g., performance of machine learning generative models in AI) or experience (biology), or negative impacts of environmental variation or noise. Moreover, could be taken at different points in system development (e.g., ChatGPT3 vs GPT4), different individual system ages (GPT4 through time), in different contexts, capacity of different observers, etc.
2.5. History, Transmission and Evolution
The above developments characterize intelligence as the resolution of subgoals – and possibly the resolution of a larger strategy – culminating in a reactive result or a purposeful objective. The indicators focus on information changes in a single system addressing a single challenge or goal and as such are unable to capture larger scale, variation or changes in intelligence, notably associated with experiential and social variables, that is, the history of the individual system and transmission of knowledge or skills, and changes stemming from the longer term, that is, population changes due to trait evolution.
2.5.1. History
Excepting in humans and select B2 species (Table 1), we know little about how intelligence capacities evolve during the lifetime of an individual system. In B2 and human systems, and simplifying considerably, the evolution of abilities is associated with positive development and experience (learning) leading to new knowledge and skills, and generalization and refinement of the world model (in humans). Artificial systems currently lack the sophisticated development characteristics of biological systems, although large language models such as ChatGPT progressively “learn”. In contrast, natural physical systems, be they tending to order or disorder, are reactive and the dissipation associated with increased disorder is analogous in some ways to biological aging.
Capacities to react to challenges or address goals change with system history (Hendriks-Jansen, 1996), and agents will experience many, possibly different difficulties and payoffs during their existence. Historical changes in intelligence address the fact that challenges may change through a lifetime and systems as well as populations adjust existing and introduce new capacities and strategies based on past, current and predicted future encounters. Capacities in most biological systems cannot be exhaustively programmed at system inception, nor can a system make a perfect map of all lived experiences. Thus, at least in some biological systems, increases in generalization abilities are expected throughout a life. For example, intelligence resources in humans are characterized by the growth of crystallized intelligence (knowledge, skills) into adulthood (Horn and Cattell, 1967, Nisbett et al., 2012) and gains in general intelligence faculties (Chai et al., 2017) through childhood and adolescence. As individuals age, they may encounter fewer never-before seen problems and are less able to maintain working memory and processing speeds (Salthouse, 2012). This suggests a strategy sequence in humans with a relative shift from dependence on others (parents, social) and experimentation, to crystallized (knowledge, skills) intelligence in youth, to fluid (thinking, creativity, flexibility) intelligence in youth and mid-life, and finally more emphasis on crystallized intelligence (possibly with more dependence on proxies, see below) into older ages. In other words, even if more nuanced (Hartshorne and Germine, 2015, Tucker-Drob et al., 2019), evidence points to the continual accumulation of reusable and modifiable motifs, knowledge and skills in youth enabling the ascension of novel reasoning in early and mid-life, the latter gradually being dominated by memory/recall into later life.
2.5.2. Transmission
Transmission can be an important facilitator of capacities and come from diverse sources. Examples include horizontal code transfer (e.g., Hall et al., 2017), social interactions (e.g., Krause et al., 2010) and technology (e.g., Biro et al., 2013). Social interactions are pervasive as transmitters of knowledge and skills and range from interactions at different scales within and between systems (McMillen and Levin, 2024), to a group where individuals exchange information and act collectively towards a goal (e.g., certain microbial or animal aggregations; Couzin, 2009)), to a division of labor in intelligence where different functions in goal attainment are distributed among individual sub-units (e.g., social insects, Pacala et al., 1996, human firms, Tirole, 2011). The intelligence substrates provided by these and other sources could complement, substitute, enhance or extend an autonomous individual’s own facilities (Lee et al., 2023). Thus, in some sense, capacities fostering intelligence are transmissible. For example, in human social learning, resolving tasks or goals is the raw material for others to observe, record and emulate, thereby contributing to the diffusion and cumulative evolution of knowledge (Roli et al., 2022, Migliano and Vinicius, 2022, Henrich and Muthukrishna, 2023). In embodying knowledge, skills and their transmission, culture and society are at the foundation of intelligence in humans and many other animal species.
We can incorporate such “proxies” into index (3e) in a simple way by assuming they increase performance and reduce goal difficulty, whereby
2.5.3. Evolution
Two other ways in which intelligence capacities can be transmitted are genetically or culturally (Burkart et al., 2017). To the extent that inherited traits impinging on intelligence follow the same evolutionary principles as other phenotypic traits, one should expect that some or all of genetically influenced intelligence traits are labile and evolve.
Despite contentious discussion of heritable influences on intelligence in humans (Gould, 1981, Herrnstein and Murray, 1994), the more general question of the biological evolution of intelligence continues to receive dedicated attention (Flinn et al., 2005, Roth and Dicke, 2005, Sterelny, 2007, Burkart et al., 2017, Pinker, 2010, Wang, 2009, Chiappe and MacDonald, 2005, Lazer and Friedman, 2007, Gabora and Russon, 2011). That intelligence traits present patterns consistent with evolutionary theory is evidenced by their influence on reproductive fitness (Burkart et al., 2017) including assortative mating (Plomin and Deary, 2015), and age-dependent (senescent) declines in fluid intelligence (Craik and Bialystok, 2006). Nevertheless, one of the main challenges to a theory of the evolution of intelligence is identifying transmissible genetic or cultural variants that contribute to intelligence traits. Despite limited knowledge of actual gene functions that correlate with measures of intelligence (Sabb et al., 2009, Savage et al., 2018), a reasonable hypothesis is that intelligence is manifested not only as active engagement, but also embedded in phenotypes themselves, that is, evolution by natural selection encodes intelligence in phenotypes at different biological levels (e.g., proteins, cells, organ systems…) and regulatory systems (e.g., homeostasis, hormesis, immune systems) (see also Shreesha and Levin, 2023, Adami, 2002, Krakauer, 2011).
The development of how TIS relates to the evolution of intelligence will be investigated in a future study. As a start, we expect that the change in the mean level of intelligence trait x in a population will be proportional to the force of selection on associated task y. Simplifying this process considerably, for a quantitative trait x that positively correlates with intelligence indicators, we have
Information processing enters into the evolution of intelligence as the relative fitness of the modified trait (Donaldson-Matasci et al., 2010). If task y has minor fitness consequences (either y is rarely encountered and/or of little fitness effect when encountered), then selection on trait x will be low. Note that (5) can be generalized to one or more traits that impinge on one or more tasks (Arnold, 1983). Moreover, note that intrinsic task complexity appears in both numerator and denominator intelligence terms and hence cancels out of the expansion of index (5).
Finally, as discussed above, the indicators of intelligence developed here do not make explicit if and how goals are concluded. Rather the fitness consequences novel intelligence traits are assumed in expression (5) to be proportional to the implicit events comprising (3e). A more accurate representation of intelligence trait evolution would account for the temporal nature (accumulation) of payoffs. Thus, the payoff of a novel behavior to a bacterium could increase its geometric mean fitness, whereas accurate predictions for a human may only be concretized after a considerable time (if at all) and as such not impact long-term fitness or evolution. Future work should consider the evolutionary consequences of temporal goal dynamics.
The full framework for TIS has a four-part structure (Figure 5), now including history and transmission within an individual system’s lifetime and evolution in populations. A given system’s intelligence is thus the integration of (i) the core system (controller, processor, memory), (ii) extension to proxies (niche construction, social interactions, technologies), (iii) nascent, communicated or acquired abilities (Table 1) and information (priors, knowledge, skills), and (iv) traits selected over evolutionary time. Indices (1-3) only (macroscopically) cover point (i). Index (4) incorporates how proxies (point (ii)) complement intrinsic system capacities, but not how they are actively used in solving and planning. (5) is a start to account for evolutionary changes in intelligence traits (point (iv)).
3. Discussion
Until relatively recently the study of intelligence focused on psychometrics in humans. With the development of AI and a greater emphasis on interdisciplinarity over the past few decades, progress has been made towards theory that spans humans and other systems, with the prospect of a general theory of intelligence based on first principles. Here, I survey recent advances towards conceptual unification of definitions of intelligence, arguing that intelligence is not a single-threshold phenomenon, but rather composed of hierarchical levels and scales and therefore applicable across all machine and biological system types and in its most primary forms, certain phenomena in physics and chemistry. Levels include capacities to perceive, sort, and recombine data, the employment of higher-level reasoning, abstraction and creativity, the application of capacities in solving and planning, and increasing accuracy and, in some contexts, efficiency. Scales enter in diverse ways, including but not limited to how intelligence becomes evolutionarily encoded in phenotypes from cells, to collective phenomena within an individual system, to the full system, and to system collectives; how abilities are acquired or lost over the life of a system (history and transmission); and abilities or capacities: the system organization, mechanisms, functions, reactive behaviors, and/or active behaviors applied to defining and achieving goals. Importantly, the indicators of intelligence presented here are inspired by, but not limited to, algorithmic systems. Thus, biological and especially human procedure is likely to be partly or completely non-algorithmic (including self-awareness), meaning that the formulae are at best approximate macroscopic indicators. The framework I propose for a Theory of Intelligences describes how these hierarchies function to extract and remodel information, either in reacting to the environment or in actively seeking goals.
3.1. Summary of TIS
The framework for a Theory of Intelligences (TIS) views intelligence as operators in a complex system, incorporating key processes, levels and scales (Table 1, Figure 5). TIS contrasts notably with frameworks in which intelligence is partitioned into reflex/reaction and planning (LeCun, 2022, Mattar and Lengyel, 2022). Specifically, in LeCun’s Mode 1, the system reacts to perception, perhaps minimally employing reasoning abilities. In Mode 2, the system can use higher reasoning abilities to plan, possibly in a hierarchical fashion. TIS differs from this framework by conceptualizing reflex/reaction as part of both solving and planning, and rather distinguishes subgoal phenomena from abilities to identify two or more subgoals, the latter based on their accuracy relative to an objective. A priority for future work is to relate how the generic abilities in Table 1 map onto the goal-specific abilities of solving and planning. More generally, a more inclusive theoretical framework of intelligence will need to incorporate system organization, intrinsic and emergent behavior, and link these to the information dynamics upon which TIS is based.
TIS is unique in taking an eco-evolutionary perspective to intelligence. An eco-evolutionary perspective recognizes that intelligence is not limited to efficiently reducing uncertainty. Addressing complexity could involve tradeoffs. Tradeoffs may emerge as active choices between strategies and/or from system or environmental constraints. For example, agents that seek fast, efficient or optimal solutions to problems may be under time constraints (e.g., escaping a predator), but many scenarios exist in which goal accuracy is important even should extra time be required. In such situations, an agent may sacrifice some efficiency and performance (exploitation) in favor of more exploratory, robust options, requiring for example, flexibility, adaptability and creativity (Del Giudice and Crespi, 2018).
TIS is grounded in the idea that intelligence is an operator that differentiates, correlates and integrates data, rendering entropy into new information. The outcome differs from the data on which it was derived. Some goals, such as victory in chess resolve existing uncertainty in each move (solving subgoals), generate new uncertainty in some moves, can anticipate future moves (planning across subgoals), and occur in huge but defined spaces leading to one of three finishes (win, draw, lose). Other endeavors such as art occur in subjective spaces and produce novel form (sculpture) or novel observable routes to a finality (cinema). Yet other objectives such as military or political ones may have significant degrees of uncertainty and unpredictable outcomes. These general examples suggest that outcomes and the means to attain them are characteristic of different goal types. All have in common information extraction and processing. Interestingly, the above arguments parallel McShea’s (McShea, 1996) classification of types of complexity, whereby complexity can be in one or more of process, outcome and/or the levels or hierarchies in each. TIS generalizes previous theoretical treatments (e.g., LeCun, 2022, Chollet, 2019, LeCun et al., 2015), providing initial steps towards their formalization in information theory (e.g., Rivoire and Leibler, 2011, Adami, 2002, Tkačik and Bialek, 2016).
Although a dedicated development of how information theory can be integrated into applicable measures of intelligence is left for future study, it is useful to note that regardless of whether estimating solving or planning, goal-useful information (in bits) can be represented as the negative logarithm of the probability that the system arrives to a given result q via solving-planning sequence i from n=1 to N. This can be represented as
which is also a measure of the complexity of the result (Lloyd and Pagels, 1988). Note that, all else being equal, higher probability trajectories require less information and so are less likely to have value, i.e., intelligence. However, “value” can only be assessed as information relative to a reference, whence have a simple indicator of intelligence
which is the difference in information at a node n, between the focal system and the reference (Woodward, 1964, Kharkevich, 1960); for fitness interpretations, see (Rivoire and Leibler, 2011), (Adami, 2023). Depending on the interval over i, (6b) has analogy with indicator (3e). Thus, I(n) could be summed over two or more nodes (i.e., …) to arrive at indicators of intelligence or measures of complexity. Importantly, can represent any baseline, for example, random noise, a benchmarked estimate, or the expected (past) ability of the agent. Note that (6b) can take on negative values (i.e., fewer bits than the baseline expectation). The above considerations are, like the previous indicators, massive oversimplifications of how to define or measure intelligence. Quantifying information, its transformations, and goal attainment forming intelligence will be highly challenging, particularly in biological systems (Rosen, 1986).
TIS posits intelligence as a universal operator of uncertainty reduction in reaction to challenges or directed to attaining goals, producing informational change. This has interesting implications. First, natural and artificial selection are forms of intelligence, since they reduce variation, acquire information about the environment, and increase fitness (e.g., Frank, 2012). Inversely, in buffering environmental vagaries, certain intelligent behaviors may reduce natural selection (Deffner, 2023). Inspired by life history theory (Stearns, 2000, Kaplan et al., 2000), selection is expected to act on heritable traits that can affect accuracy and/or efficiency in existing intelligence niches, and traits that affect flexibility, generalization and creativity in new intelligence niches. These either/or expectations of trait evolution will depend to some extent on contexts and tradeoffs (Del Giudice and Crespi, 2018). Second, organizational change could involve some combination of assembly, disassembly, rearrangement, morphing and recombination. It is an open question as to how information dynamics via these and other modes affects complexity (Adami, 2002, Wong et al., 2023). According to TIS, intelligence decreases uncertainty, but it can also transiently increase it (either due to error or counter-intuitive but viable pathways), and intelligence can either increase, decrease or leave unchanged complexity. These observations do not contradict the prediction that intelligence is associated with increased information, either in the path to a goal and/or in the goal itself (see also Adami, 2002). Together with the first implication (natural selection) this is consistent with the idea that the response to selection encodes intelligence into (multi-scale and multi-level) structures and functions. Thus, memory – a key component of intelligence – can be stored in one or more ways: inherited as phenotypes, stored electrochemically as short- or long-term memory, or stored in proxies such as society, collectives, technology, cultural artifacts and constructed niches (Figure 5). The extent to which contemporary phenotypes and proxies are a compendium of “information past” and “intelligences past” is an interesting open question.
3.2. Characteristics
The framework for TIS is based on concepts, hypotheses and definitions. As such, rigorous testable predictions are not yet possible. Nevertheless, more speculative predictions readily emerge.
SOLVING, PLANNING AND COMPLEXITY. The interrelations between intelligence and complexity are at the foundation of TIS. Specifically, intelligence traits are expected to broadly concord with the complexity of attaining goals relevant to the fitness of the system, i.e., the intelligence niche (Figure 2). The intelligence niches of any two individuals of the same system type could overlap in some abilities (e.g., musical ability), but possibly not in others (ability to play a specific musical instrument). Capacities are expected to have similar characteristics across niches (e.g., visual acuity in many animal species used both in foraging and avoiding predators), but also specificity in certain niches (ability to climb trees to escape predators). Solving is required for goals of any complexity, whereas only as goals become sufficiently complex relative to the abilities of the system does planning (which minimally entails costs in time and energy) become useful and even necessary (Figure 3). I predict goal achievement will correlate with solving capacities over sufficiently low complexities, and more strongly with planning abilities over sufficiently high complexities (Figure 1A, Figure 3). Although I know of no evaluation of this prediction, the results of Duncan and colleagues (Duncan et al., 2017) showed that proxy planning (an examiner separating complex problems into multiple parts) equalized performance among human subjects of different abilities.
PROXIES. Proxies are an underappreciated and understudied influence on intelligence and their specific roles in system intelligence remain largely unknown. Proxies such as tools, transportation and AI can function to help solve local, myopic challenges, and in augmenting the system’s own ability to solve, make planning logistically more feasible. Proxies that themselves are able to plan can be important in achieving complex goals out of the reach of individual systems (e.g., human interventions à la (Duncan et al., 2017). Human social interactions have served this function for millennia and the eventual emergence of AGI could assume part of this capacity (LeCun, 2022), possibly as proxy collectives (Duéñez-Guzmán et al., 2023). I also predict that proxies coevolve with their hosts, and insofar as the former increases the robustness of the latter’s capacities, proxies could result in system trait dependence and degeneration of costly, redundant traits (Edelman and Gally, 2001).
SYSTEM EVOLUTION. In positing that intelligence equates with increased efficiency on familiar goals and more of an emphasis on accuracy for novel goals, TIS provides a framework that can contribute to a greater understanding of system evolution including assembly, growth, diversification and complexity (e.g., Stanley and Miikkulainen, 2004, Wong et al., 2023, Barrett and Kurzban, 2006, Tria et al., 2014). Empirical bases for change during lifetimes and through generations include (1) on lifetime scales, intelligence is influenced by sensing and past experience and influences current strategies and future goals (Klyubin et al., 2005, Pearl and Mackenzie, 2018), and (2) on multigenerational evolutionary scales, natural selection drives intelligence trait evolution in response to relative performance, needs and opportunities (Burkart et al., 2017, Pinker, 2010). There is also theoretical support that systems can evolve or coevolve in complexity with the relevance of environmental challenges (Adami, 2002, Klyubin et al., 2005, Frank, 2009, Zaman et al., 2014, Xue et al., 2019). In contrast, excepting for humans and select animals (e.g., Li et al., 2004, Whiten and Van Schaik, 2007), we lack evidence for how intelligence traits actually change during lifetimes given costs, benefits and tradeoffs, and suggest that life-history theory could provide testable predictions (Stearns, 2000).
NICHE EVOLUTION. Depending on system type, different goals in the intelligence niche might vary relatively little (e.g., prokaryotes) or considerably (e.g., mammals) in complexity. This means that a system with limited capacities will – in the extreme – either need to solve each of a myopic sequence of uncertainties, or use basic, node-adjacent, planning abilities to achieve greater path manageability, efficiency and goal accuracy. Under the reasonable assumption that systems can only persist if a sufficient number of essential (growth, survival, reproduction) goals are attainable, consistent with the “competencies in development” approach (Flavell, 1979), simple cognitive solving should precede metacognitive planning, both during the initial development of the system and in situations where systems enter new intelligence niches. Moreover, I predict that due to the challenges in accepting and employing proxies, the population distribution of proxy-supported intelligence should be initially positively skewed when a new proxy (e.g., the Internet) is introduced, gradually shifting towards negative skew when the majority of the population has access to, needs, and adopts the innovation (Rogers, 2014).
The TIS framework places the notion of difficulty in a new perspective. To the extent that intelligence traits are typical of other phenotypic traits, and even if an oversimplification, selection is expected to tend to improve existing intelligence capacities in familiar environments and diversify intelligence capacities in novel environments. Both constitute the raw material enabling successful encounters with new, more complex goals (Godfrey-Smith, 2002). I predict that difficulty and surprisal continually decrease in current intelligence niches, but increase as systems extend existing niches or explore new niches.
TAXON EVOLUTION. The above predictions converge on the idea that solving comes before planning, but planning needs solving to be effective; that is, the latter cannot completely substitute for the former. This logic implies that solving evolution precedes the emergence of planning across phylogeny, that is, some degree of solving trait diversification would have occurred before the appearance of meta (e.g., metacognitive) abilities, and specifically planning. Nevertheless, if solving is ancestral and conserved as reactive functions or active behaviors, then transitions from B1 to B2 intelligence and from B2 to humans would have implicated the emergence of augmented or novel solving abilities and possibly planning capacities. For example, some cognitive adaptations in birds, mammals and cephalopods involve the development of brain regions permitting more acute perception, reaction to movement and anticipation of near future events (Smith et al., 2014, Schnell et al., 2021, Zacks et al., 2022). Disentangling the selective drivers of the evolution of ability innovations will be challenging (Hochberg et al., 2017).
3.3. Implications
3.3.1. Transitions in Intelligence?
Major taxonomic groups are distinguished by their capacities to resolve their niche-relevant goals in their niche-relevant environments (Godfrey-Smith, 2002). An interesting question that emerges from TIS is whether the distribution of intelligence traits is continuous across taxa, or rather shows discontinuities with the emergence of new clades, suggestive of innovations or transitions in intelligence. Although it is premature to claim the distinctions in Table 1 have a solid scientific basis, I hypothesize that insofar as traits affecting intelligence are typical of other phenotypic traits, evolutionary discontinuities in intelligence require coevolution of intelligent systems with environments.
System-environment coevolution can be understood as follows. Intelligent systems are characterized by abilities at different levels (Table 1) and the system infrastructure that supports these abilities. Some, possibly all, intelligence traits are labile to change and depending on the trait and the system type, change can be due to individual experiences, associative learning, or molecular or cultural evolution. The extent to which these and other sources of change occur will depend on contexts, i.e., interactions with environments. Environments change and can “evolve” since they contain the system population itself (social interactions), other species that potentially evolve and vary in ecologies (interspecific interactions such as competition, predation and mutualism), but also changing features of the intelligence niche, including how the products of intelligence change the niche (e.g., niche construction Laland et al., 2016) to promote novel, future goals. This opens the possibility of autocatalytic dynamics, since intelligence changes the environment and, in doing so, nourishes itself, enabling open-ended evolution: entry into new, more complex environments, and so on. Our understanding of system-environment coevolution (Adami, 2002, Brandon and Antonovics, 1996), system adaptation to predictive cues, and evolution to predict environments (Rivoire and Leibler, 2011, Donaldson-Matasci et al., 2010, Calvo and Baluška, 2015) is in its early days, but holds the potential for an assessment of the richness of intelligence traits and how intelligence ruptures and innovations may emerge.
One interesting question is whether putative discontinuities in intelligence between system types are somehow associated with transitions in intelligence individuality. Prime examples could include transitions from unicellular to multicellular systems and from solitary living to collectives. A reasonable expectation is that individual capacities to process information and attain goals is more limited than for groups and collectives. Interactive layers within an individual are somewhat analogous to individuals as layers in a collective, a key difference being more diverse histories and environmental experience in the latter. Collective intelligence can be viewed both as evolved for the collective and as a proxy to each sub-unit, suggesting that the evolution of collectives might in some instances begin with individuals facultatively serving as intelligence proxies for others. Key to collective intelligence is information sharing (McMillen and Levin, 2024) and goal alignment (Kaufmann et al., 2021, Leonard and Levin, 2022) and this supports the hypothesis that selection on intelligence traits when interests are aligned can favor the transition to the higher individual, including the emergence of collective intelligence traits.
Moreover, should collective intelligence emerge and the collective be sufficiently large and encounter sufficiently diverse challenges, then general theory (Rueffler et al., 2012) would suggest the emergence of division of labor in intelligence. Division of labor can produce more efficient, accurate goal achievement and more diverse capabilities permitting more goals. Thus, the outstanding question that might lead to a theory of transitions in intelligence is whether the evolution of higher levels of individuality are accompanied (or even driven) by innovations in intelligence. Nevertheless, to the extent that a macroevolutionary theory of collective intelligence will be inspired by transitions in individuality (West et al., 2015) and the evolution of multicellularity (Hochberg et al., 2008), the theory would somehow need to incorporate division of labor in solving and planning (see Gorelick et al., 2004) for information theory in social groups) and account for taxa that have not transitioned to stable collective units, notably certain mammals, birds and cephalopods (Amodio et al., 2019).
3.3.2. The Spectrum of Intelligences
We conclude with comparisons and contrasts in intelligence across major system types. Many of these ideas are very preliminary and require further discussion and refinement.
PHYSICS TO BIOLOGY. Uncertainty reduction and corresponding information gain may involve one or more of ordering, mutating, morphing and recombining code. In biological organisms these transformations are usually associated with some form of activity, for example searching for resources or avoiding predators. In the absence of active and sometimes purposeful behavior characteristic of biology, intelligence minimally is information gain. Some of the simplest reactions that result in reduced uncertainty and structured regularity are the formation of inorganic crystals (e.g., Frenkel 2015). Purely “physical intelligence” in inorganic crystal formation employs information (atoms or molecules) and processors (physical and chemical charges and forces) in the context of surrounding environmental conditions (physical distance, pressure, temperature). To the extent that there is only a single path from disordered mineral to ordered crystal, “intelligence” is the transition to order at scales at and beyond individual atoms. Given a single deterministic reaction sequence, there can be no novelty or surprisal, though some crystals may be more “difficult” to form than others due to limiting environmental conditions and complex reaction sequences (e.g., Gebauer et al. 2022). These and other basic features of certain physio-chemical systems have been hypothesized to have set the stage for the emergence of biological life on Earth (Morowitz 2002), and may comprise the scaffolding that permits certain cell behaviors, such as membrane permeability, DNA expression and replication, organelle function, protein synthesis and enzyme behavior (Smith and Morowitz 2016).
BIOLOGY. Taxonomic comparisons of intelligence across the tree of life are largely meaningless in the absence of consideration of environments, species niches, and common ancestry. The types, diversities and amplitudes of intelligence traits as habitat adaptations is an understudied area, with most work focusing on species with exceptional abilities from the standpoint of humans (Roth 2015). TIS posits that intelligence capacities will be influenced by environmental conditions, but makes no assumption regarding the relative contributions to payoffs or fitness of different intelligence traits. TIS does however link traits (as the composite ability term Q) to difficulty, and because traits are never perfectly aligned to all goal challenges and trait evolution always lags behind environmental change (Maynard Smith 1978), we suggest that understanding difficulty is central to understanding intelligence. For instance, intelligence in B1 life (Table 1) involves the accurate sensing of the environment and decision making (Dussutour et al. 2019, Calvo et al. 2020, Reber et al. 2023). Behavioral alternatives in, for example, metabolic pathways and movement patterns are observed across prokaryotes and eukaryotes, although the difficulty involved is not in long-range future planning, but rather current or short-range accurate and efficient solving (rate limitations and tradeoffs among competing activities). In contrast, the notion of surprisal in B1 taxa is more nuanced, since many species can exhibit plastic responses to sufficiently infrequently encountered challenges and opportunities (Chevin and Hoffmann 2017). An interesting possibility is that plasticity and avoidance are fundamental ways to flexibly deal with uncertainty and novelty (Godfrey-Smith 2002, Krakauer 2011, Muñoz 2022)). That is, phenotypic and behavioral plasticity in B1 taxa are at the foundation of intelligence in these species and some of these traits are conserved across B2 life and in humans.
BIOLOGY TO AI. Similarities and differences between biological and artificial intelligence have been extensively discussed (e.g., Goyal and Bengio 2022, Sinz et al. 2019) the main distinctions including
(1) the dependence of AI functioning on non-AI sources, (2) limited capacities for inference in AI, (3) related and perhaps most importantly, limitations in current AI to employ affordances, that is action possibilities that an object or environment provides (Roli et al. 2022), and (4) as AI is fundamentally digital and is less limited by the largely analogue information processing constraints characteritstic of biological life. Related, AI’s current principal shortcomings relative to humans include, non-mutually exclusive (1) flexibility and ability to generalize, (2) updating or adapting world models, (3) self- assessment and depth in understanding, and (4) that alternatives to sub-standard or failed attempts. Future work on the TIS framework should explore key structural features and processes explaining these system differences, including self-assessments, differences in knowledge and skill categories, and in the sub-system structure of feedbacks (LeCun 2022). Moreover, as discussed above, since AI is a semi- or non-autonomous product of human ingenuity, current AI functions as a proxy to human intelligence. TIS accounts for the evolution of designed proxies (see also Lachmann and Walker 2019), that is, new functions in technology that augment or replace existing human capacities. As humans develop AI to become AGI, the latter may at some point break-away from their human hosts through scaffolding and achieve some level of autonomy (Bengio et al. 2024, Kinniment et al. 2023).
BEYOND EVOLUTION. Intelligence functions not only to achieve goals, but as experiences that promote future improvements to engage in new goal spaces. Importantly, experiences are not always successful and learning from errors is well-recognized as improving performance (Shadmehr et al. 2010, Metcalfe 2017). As such, I hypothesize that in addition to successful outcomes, inefficient, erroneous or dead-end paths contribute information that can be recycled or repurposed both to future challenges (learning from failure) and to undertakings not necessarily affecting Darwinian fitness, such as leisure, play, sports, politics, games and art (see also Chu and Schulz 2020). If correct, then TIS is applicable to both theories of evolution (genetic, cultural, technological) and forms of goal attainment or expression not directly under natural selection.
HUMANS. A tremendous amount of research has been dedicated to the “uniqueness” of Homo sapiens with numerous hypotheses and theories on how and why humans have certain highly devel- oped capacities that are either less developed or non-existent in other species. Empirical evidence is clear that modern humans have achieved unparalleled cognitive and communication abilities, and cumulative culture and social, technological and informational developments (e.g., Pinker 2010, Gibson 1991, Tennie et al. 2009, Pagel 2012). Despite longevity (Kaplan and Robson 2002) and environmental challenges (Kaplan et al. 2000) being hypothesized as key components in the evolution of human intelli- gence (and see similar arguments for other animals, Amodio et al. 2019), cognitive and communication (language) capacities associated with specific regions of the human brain and vocal apparatus are the only unique anatomical systems explaining stand-alone differences between humans and other animals (Laland and Seed 2021, Gibson 2002). Cumulative culture, on the other hand, could be abstractly regarded as a group proxy, that is the storage, communication and expression of cultural artifacts, including priors and knowledge, and higher-level embodiments such as social norms and institutions. Culture and brains are hypothesized to have coevolved (Muthukrishna et al. 2018), which suggests that human intelligence owes to both slow molecular evolution (brains) and the faster behavioral evolution (cultures, collectives, individuals). From the standpoint of an individual, culture is a gifted information proxy from the current and ancestral groups that can increase intelligence (Sternberg 2004), and indeed this could be a part of what distinguishes human from other-primate intelligence (Tomasello 2001).
HUMANS AND PROXIES. As argued above, proxies are central to the scaffolding, amplification and diversification of human intelligence. This is consistent with ideas that proxies and culture coevolve (Brinkmann et al. 2023), and that the “individual” can extend to proxies (Krakauer et al. 2020) and the emergence of a new level of individuality (Rainey 2023). TIS has the ingredients to explain the generality of human intelligence, but would need to be further developed into explicit mathematical models in order to understand the varied contributions of proxies. Anatomical brains, group culture and technology evolve on different time scales (Perreault 2012) and the multi-time scale evolution of intelligence is an oft-neglected part of this list. That is, intelligence is in some respects analogous to real-time biological evolution, but with foresight and occurring in machines, biological individuals and collectives. The fact that innovations such as AI are developing so rapidly is consistent with the idea that we humans select for machine intelligence (Turing 1950) and that evolutionary runaways are possible (Lee et al. 2024). Thus, a tantalizing possibly to explain the discontinuity of human intelligence with respect to other biological systems is that the coevolution of systems and their constructions is an auto-catalytic process (e.g., Cazzolla Gatti et al. 2020), producing the intelligence transitions that occurred in humans and are arguably currently occurring in human coevolution with AI.
Acknowledgments
I am grateful to reviewers for their comments that helped improve the manuscript, and thank numerous colleagues for discussions.
Statements and Declarations
The author has no competing interests. No funding was received for conducting this study. The author has no relevant financial or non-financial interests to disclose.
References
- Rogers, E.M. Claude Shannon’s Cryptography Research during World War II and the Mathematical Theory of Communication. In Proceedings of the Proceedings of IEEE International Carnahan Conference on Security Technology CCST-94, Albuquerque, NM, USA, 1994; pp. 1–5. [Google Scholar] [CrossRef]
- Legg, S., and M. Hutter. 2007. A Collection of Definitions of Intelligence, arXiv:0706.3639.
- Albus, J. 1991. Outline for a Theory of Intelligence. IEEE Transactions on Systems, Man, and Cybernetics 21: 473–509. [Google Scholar] [CrossRef]
- Hawkins, J. 2021. A Thousand Brains: A New Theory of Intelligence, first edition, 1st ed. New York: Basic Books. [Google Scholar]
- LeCun, Y. 2022. A Path towards Autonomous Machine Intelligence Version 0.9. 2, 2022-06-27. [Google Scholar]
- Brillouin, L. 1953. The Negentropy Principle of Information. Journal of Applied Physics 24: 1152–1163. [Google Scholar] [CrossRef]
- Landauer, R. 1991. Information Is Physical. Physics Today 44: 23–29. [Google Scholar] [CrossRef]
- Tononi, G., and C. Koch. 2015. Consciousness: Here, There and Everywhere? Philosophical Transactions of the Royal Society B: Biological Sciences 370: 20140167. [Google Scholar] [CrossRef] [PubMed]
- Hohwy, J. 2016. The Self-Evidencing Brain: The Self-Evidencing Brain. Noûs 50: 259–285. [Google Scholar] [CrossRef]
- Roitblat, H.L. 2020. Algorithms Are Not Enough: Creating General Artificial Intelligence. Cambridge, Massachusetts: The MIT Press. [Google Scholar]
- Goyal, A., and Y. Bengio. 2022. Inductive Biases for Deep Learning of Higher-Level Cognition. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences 478: 20210068. [Google Scholar] [CrossRef]
- Korteling, J.E.H., G.C. Van De Boer-Visschedijk, R.A.M. Blankendaal, R.C. Boonekamp, and A.R. Eikelboom. 2021. Human-versus Artificial Intelligence. Frontiers in Artificial Intelligence 4: 622364. [Google Scholar] [CrossRef]
- Duncan, J., D. Chylinski, D.J. Mitchell, and A. Bhandari. 2017. Complexity and Compositionality in Fluid Intelligence. Proceedings of the National Academy of Sciences 114: 5295–5299. [Google Scholar] [CrossRef]
- Barbey, A.K. 2018. Network Neuroscience Theory of Human Intelligence. Trends in Cognitive Sciences 22: 8–20. [Google Scholar] [CrossRef]
- Stemler, S.E., and A. Naples. 2021. Rasch Measurement v. Item Response Theory: Knowing When to Cross the Line. Practical Assessment, Research & Evaluation 26: 11. [Google Scholar] [CrossRef]
- Epstein, R. 2016. The Empty Brain. Aeon. [Google Scholar]
- Carabantes, M. 2020. Black-Box Artificial Intelligence: An Epistemological and Critical Analysis. AI & Society 35: 309–317. [Google Scholar] [CrossRef]
- Bodria, F., F. Giannotti, R. Guidotti, F. Naretto, D. Pedreschi, and S. Rinzivillo. 2021. Benchmarking and Survey of Explanation Methods for Black Box Models. arXiv arXiv:cs/2102.13076. [Google Scholar] [CrossRef]
- Cattell, R.B. 1963. Theory of Fluid and Crystallized Intelligence: A Critical Experiment. Journal of Educational Psychology 54: 1–22. [Google Scholar] [CrossRef]
- McGrew, K.S., and B.J. Wendling. 2010. Cattell-Horn-Carroll Cognitive-Achievement Relations: What We Have Learned from the Past 20 Years of Research: CHC COG-ACH Relations. Psychology in the Schools 47: 651–675. [Google Scholar] [CrossRef]
- Flanagan, D.P., and S.G. Dixon. 2014. The Cattell-Horn-Carroll Theory of Cognitive Abilities. In Encyclopedia of Special Education. Edited by C.R. Reynolds, K.J. Vannest and E. Fletcher-Janzen. Hoboken, NJ, USA: John Wiley & Sons, Inc., p. ese0431. [Google Scholar] [CrossRef]
- Parr, T., G. Pezzulo, and K.J. Friston. 2022. Active Inference: The Free Energy Principle in Mind, Brain, and Behavior. The MIT Press. [Google Scholar] [CrossRef]
- Sternberg, R.J. 1984. Toward a Triarchic Theory of Human Intelligence. Behavioral and Brain Sciences 7: 269–287. [Google Scholar] [CrossRef]
- Goertzel, B. 1993. The Structure of Intelligence: A New Mathematical Model of Mind. Recent Research in Psychology. New York: Springer-Verlag. [Google Scholar]
- Legg, S., and M. Hutter. 2007. Universal Intelligence: A Definition of Machine Intelligence. Minds and Machines 17: 391–444. [Google Scholar] [CrossRef]
- Georgiou, G.K., K. Guo, N. Naveenkumar, A.P.A. Vieira, and J. Das. 2020. PASS Theory of Intelligence and Academic Achievement: A Meta-Analytic Review. Intelligence 79: 101431. [Google Scholar] [CrossRef]
- Levin, M. 2022. Technological Approach to Mind Everywhere: An Experimentally-Grounded Framework for Understanding Diverse Bodies and Minds. Frontiers in Systems Neuroscience 16: 768201. [Google Scholar] [CrossRef]
- Hendriks-Jansen, H. 1996. Catching Ourselves in the Act: Situated Activity, Interactive Emergence, Evolution, and Human Thought. Complex Adaptive Systems. Cambridge, Mass: MIT Press. [Google Scholar]
- Flinn, M.V., D.C. Geary, and C.V. Ward. 2005. Ecological Dominance, Social Competition, and Coalitionary Arms Races. Evolution and Human Behavior 26: 10–46. [Google Scholar] [CrossRef]
- Roth, G., and U. Dicke. 2005. Evolution of the Brain and Intelligence. Trends in Cognitive Sciences 9: 250–257. [Google Scholar] [CrossRef] [PubMed]
- Sterelny, K. 2007. Social Intelligence, Human Intelligence and Niche Construction. Philosophical Transactions of the Royal Society B: Biological Sciences 362: 719–730. [Google Scholar] [CrossRef] [PubMed]
- Reader, S.M., Y. Hager, and K.N. Laland. 2011. The Evolution of Primate General and Cultural Intelligence. Philosophical Transactions of the Royal Society B: Biological Sciences 366: 1017–1027. [Google Scholar] [CrossRef]
- Burkart, J.M., M.N. Schubiger, and C.P. Van Schaik. 2017. The Evolution of General Intelligence. Behavioral and Brain Sciences 40: e195. [Google Scholar] [CrossRef]
- Shreesha, L., and M. Levin. 2023. Cellular Competency during Development Alters Evolutionary Dynamics in an Artificial Embryogeny Model. Entropy 25: 131. [Google Scholar] [CrossRef]
- Spearman, C. 1904. "General Intelligence, "Objectively Determined and Measured. The American Journal of Psychology 15: 201. [Google Scholar] [CrossRef]
- Carroll, J.B. 1993. Human Cognitive Abilities: A Survey of Factor-Analytic Studies, 1 ed. Cambridge University Press. [Google Scholar] [CrossRef]
- Conrad, M. 1996. Cross-Scale Information Processing in Evolution, Development and Intelligence. Biosystems 38: 97–109. [Google Scholar] [CrossRef]
- Adams, S.S., I. Arel, J. Bach, R. Coop, R. Furlan, B. Goertzel, J.S. Hall, A. Samsonovich, M. Scheutz, M. Schlesinger, and et al. 2012. Mapping the Landscape of Human-Level Artificial General Intelligence. AI Magazine 33: 25–41. [Google Scholar] [CrossRef]
- Deary, I.J. 2014. The Stability of Intelligence From Childhood to Old Age. Current Directions in Psychological Science 23: 239–245. [Google Scholar] [CrossRef]
- Chollet, F. 2019. On the Measure of Intelligence. arXiv arXiv:1911.01547. [Google Scholar]
- Burgoyne, A.P., C.A. Mashburn, J.S. Tsukahara, and R.W. Engle. 2022. Attention Control and Process Overlap Theory: Searching for Cognitive Processes Underpinning the Positive Manifold. Intelligence 91: 101629. [Google Scholar] [CrossRef]
- Friston, K.J., M.J. Ramstead, A.B. Kiefer, A. Tschantz, C.L. Buckley, M. Albarracin, R.J. Pitliya, C. Heins, B. Klein, B. Millidge, and et al. 2024. Designing Ecosystems of Intelligence from First Principles. Collective Intelligence 3: 26339137231222481. [Google Scholar] [CrossRef]
- Ladyman, J., J. Lambert, and K. Wiesner. 2013. What Is a Complex System? European Journal for Philosophy of Science 3: 33–67. [Google Scholar] [CrossRef]
- Brooks, D.R., J. Collier, B.A. Maurer, J.D.H. Smith, and E.O. Wiley. 1989. Entropy and Information in Evolving Biological Systems. Biology & Philosophy 4: 407–432. [Google Scholar] [CrossRef]
- Odling-Smee, F.J., K.N. Laland, and M.W. Feldman. 2013. Niche Construction: The Neglected Process in Evolution (MPB-37). Princeton University Press. [Google Scholar] [CrossRef]
- Adami, C. 2023. The Elements of Intelligence. Artificial Life 29: 293–307. [Google Scholar] [CrossRef] [PubMed]
- Hernández-Orallo, J. 2017. The Measure of All Minds: Evaluating Natural and Artificial Intelligence, 1 ed. Cambridge University Press. [Google Scholar] [CrossRef]
- Pezzulo, G., and P. Cisek. 2016. Navigating the Affordance Landscape: Feedback Control as a Process Model of Behavior and Cognition. Trends in Cognitive Sciences 20: 414–424. [Google Scholar] [CrossRef]
- Babcock, G., and D.W. McShea. 2023. Goal Directedness and the Field Concept. Philosophy of Science, 1–10. [Google Scholar] [CrossRef]
- Rivoire, O., and S. Leibler. 2011. The Value of Information for Populations in Varying Environments. Journal of Statistical Physics 142: 1124–1166. [Google Scholar] [CrossRef]
- Lloyd, S., and H. Pagels. 1988. Complexity as Thermodynamic Depth. Annals of Physics 188: 186–213. [Google Scholar] [CrossRef]
- Kauffman, S.A. 2000. Investigations. Oxford: New York: Oxford University Press. [Google Scholar]
- Hommel, B., J. Müsseler, G. Aschersleben, and W. Prinz. 2001. The Theory of Event Coding (TEC): A Framework for Perception and Action Planning. Behavioral and Brain Sciences 24: 849–878. [Google Scholar] [CrossRef]
- Dolan, R.J., and P. Dayan. 2013. Goals and Habits in the Brain. Neuron 80: 312–325. [Google Scholar] [CrossRef] [PubMed]
- Godfrey-Smith, P. 2002. Edited by R. Sternberg and J. Kaufman. Environmental Complexity and the Evolution of Cognition. In The Evolution of Intelligence. Lawrence Erlbaum: pp. 233–249. [Google Scholar]
- Pinker, S. 2010. The Cognitive Niche: Coevolution of Intelligence, Sociality, and Language. Proceedings of the National Academy of Sciences 107: 8993–8999. [Google Scholar] [CrossRef] [PubMed]
- Shannon, C.E. 1948. A Mathematical Theory of Communication. Bell System Technical Journal 27: 379–423. [Google Scholar] [CrossRef]
- Shannon, C.E., and W. Weaver. 1998. The Mathematical Theory of Communication. Urbana: Univ. of Illinois Press. [Google Scholar]
- Gottfredson, L.S. 1997. Why g Matters: The Complexity of Everyday Life. Intelligence 24: 79–132. [Google Scholar] [CrossRef]
- Donaldson-Matasci, M.C., C.T. Bergstrom, and M. Lachmann. 2010. The Fitness Value of Information. Oikos 119: 219–230. [Google Scholar] [CrossRef]
- Frank, S.A. 2012. Natural Selection. V. How to Read the Fundamental Equations of Evolutionary Change in Terms of Information Theory. Journal of Evolutionary Biology 25: 2377–2396. [Google Scholar] [CrossRef] [PubMed]
- Collier, J.D., and C.A. Hooker. 1999. Complexly Organised Dynamical Systems. Open Systems Information Dynamics 6: 241–302. [Google Scholar] [CrossRef]
- Stanley, K.O., and R. Miikkulainen. 2004. Competitive Coevolution through Evolutionary Complexification. Journal of Artificial Intelligence Research 21: 63–100. [Google Scholar] [CrossRef]
- Baluška, F., and M. Levin. 2016. On Having No Head: Cognition throughout Biological Systems. Frontiers in Psychology 7: 902. [Google Scholar] [CrossRef]
- Frank, A., D. Grinspoon, and S. Walker. 2022. Intelligence as a Planetary Scale Process. International Journal of Astrobiology 21: 47–61. [Google Scholar] [CrossRef]
- Fields, C., and M. Levin. 2022. Competency in Navigating Arbitrary Spaces as an Invariant for Analyzing Cognition in Diverse Embodiments. Entropy 24: 819. [Google Scholar] [CrossRef] [PubMed]
- De Martino, B., and A. Cortese. 2023. Goals, Usefulness and Abstraction in Value-Based Choice. Trends in Cognitive Sciences 27: 65–80. [Google Scholar] [CrossRef] [PubMed]
- Kauffman, S., R.K. Logan, R. Este, R. Goebel, D. Hobill, and I. Shmulevich. 2007. Propagating Organization: An Enquiry. Biology & Philosophy 23: 27–45. [Google Scholar] [CrossRef]
- Chase, J.M., and M.A. Leibold. 2003. Ecological Niches: Linking Classical and Contemporary Approaches. University of Chicago Press. [Google Scholar] [CrossRef]
- LeCun, Y., Y. Bengio, and G. Hinton. 2015. Deep Learning. Nature 521: 436–444. [Google Scholar] [CrossRef] [PubMed]
- Botvinick, M., and M. Toussaint. 2012. Planning as Inference. Trends in Cognitive Sciences 16: 485–488. [Google Scholar] [CrossRef]
- Rosen, R. 1958. A Relational Theory of Biological Systems. The Bulletin of Mathematical Biophysics 20: 245–260. [Google Scholar] [CrossRef]
- Maturana, H. 1980. The Quest for the Intelligence of Intelligence. Journal of Social and Biological Systems 3: 135–148. [Google Scholar] [CrossRef]
- McCarthy, J., M. Minsky, N. Rochester, and C. Shannon. 2006. A Proposal for the Dartmouth Summer Research Project on Artificial Intelligence August 31, 1955. AI Magazine 27: 12–14. [Google Scholar]
- Gershman, S.J., E.J. Horvitz, and J.B. Tenenbaum. 2015. Computational Rationality: A Converging Paradigm for Intelligence in Brains, Minds, and Machines. Science 349: 273–278. [Google Scholar] [CrossRef]
- Scholkopf, B., F. Locatello, S. Bauer, N.R. Ke, N. Kalchbrenner, A. Goyal, and Y. Bengio. 2021. Toward Causal Representation Learning. Proceedings of the IEEE 109: 612–634. [Google Scholar] [CrossRef]
- Adami, C. 2024. The Evolution of Biological Information: How Evolution Creates Complexity, from Viruses to Brains. Princeton: Princeton University Press. [Google Scholar]
- Rosen, R. 1986. On Information and Complexity. In Complexity, Language, and Life: Mathematical Approaches. Edited by S.A. Levin, J.L. Casti and A. Karlqvist. Berlin, Heidelberg: Springer Berlin Heidelberg, Vol. 16, pp. 174–196. [Google Scholar] [CrossRef]
- Cronin, L., N. Krasnogor, B.G. Davis, C. Alexander, N. Robertson, J.H.G. Steinke, S.L.M. Schroeder, A.N. Khlobystov, G. Cooper, P.M. Gardner, and et al. 2006. The Imitation Game—a Computational Chemical Approach to Recognizing Life. Nature Biotechnology 24: 1203–1206. [Google Scholar] [CrossRef] [PubMed]
- Rosen, R. 2012. Anticipatory Systems: Philosophical, Mathematical, and Methodological Foundations; IFSR International Series in Systems Science and Systems Engineering. New York, NY: Springer New York, Vol. 1. [Google Scholar] [CrossRef]
- Wiener, N. 1948. Cybernetics: Or, Control & Communication in the Animal and the Machine, 1st ed. Cambridge, Mass: Librarie Hermann & Cie, Paris/MIT Press. [Google Scholar]
- Brooks, R.A. 1991. Intelligence without Representation. Artificial Intelligence 47: 139–159. [Google Scholar] [CrossRef]
- Kabadayi, C., K. Bobrowicz, and M. Osvath. 2018. The Detour Paradigm in Animal Cognition. Animal Cognition 21: 21–35. [Google Scholar] [CrossRef]
- Wang, P. 2019. On Defining Artificial Intelligence. Journal of Artificial General Intelligence 10: 1–37. [Google Scholar] [CrossRef]
- Lyon, P. 2020. Of What Is “Minimal Cognition” the Half-Baked Version? Adaptive Behavior 28: 407–424. [Google Scholar] [CrossRef]
- Roli, A., J. Jaeger, and S.A. Kauffman. 2022. How Organisms Come to Know the World: Fundamental Limits on Artificial General Intelligence. Frontiers in Ecology and Evolution 9: 806283. [Google Scholar] [CrossRef]
- Cohen, J.D., S.M. McClure, and A.J. Yu. 2007. Should I Stay or Should I Go? How the Human Brain Manages the Trade-off between Exploitation and Exploration. Philosophical Transactions of the Royal Society B: Biological Sciences 362: 933–942. [Google Scholar] [CrossRef]
- Mehlhorn, K., B.R. Newell, P.M. Todd, M.D. Lee, K. Morgan, V.A. Braithwaite, D. Hausmann, K. Fiedler, and C. Gonzalez. 2015. Unpacking the Exploration–Exploitation Tradeoff: A Synthesis of Human and Animal Literatures. Decision 2: 191–215. [Google Scholar] [CrossRef]
- Del Giudice, M., and B.J. Crespi. 2018. Basic Functional Trade-Offs in Cognition: An Integrative Framework. Cognition 179: 56–70. [Google Scholar] [CrossRef]
- Maynard Smith, J. 1978. Optimization Theory in Evolution. Annual Review of Ecology and Systematics 9: 31–56. [Google Scholar] [CrossRef]
- Emery, N.J., and N.S. Clayton. 2004. The Mentality of Crows: Convergent Evolution of Intelligence in Corvids and Apes. Science 306: 1903–1907. [Google Scholar] [CrossRef] [PubMed]
- Edelman, D.B., and A.K. Seth. 2009. Animal Consciousness: A Synthetic Approach. Trends in Neurosciences 32: 476–484. [Google Scholar] [CrossRef]
- Amodio, P., M. Boeckle, A.K. Schnell, L. Ostojíc, G. Fiorito, and N.S. Clayton. 2019. Grow Smart and Die Young: Why Did Cephalopods Evolve Intelligence? Trends in Ecology & Evolution 34: 45–56. [Google Scholar] [CrossRef]
- Anderson, P.W. 1972. More Is Different: Broken Symmetry and the Nature of the Hierarchical Structure of Science. Science 177: 393–396. [Google Scholar] [CrossRef] [PubMed]
- Frenkel, D. 2015. Order through Entropy. Nature Materials 14: 9–12. [Google Scholar] [CrossRef]
- Kalantar-Zadeh, K., T. Daeneke, and J. Tang. 2024. The Atomic Intelligence of Liquid Metals. Science 385: 372–373. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y. 2009. On Abstract Intelligence: Toward a Unifying Theory of Natural, Artificial, Machinable, and Computational Intelligence. International Journal of Software Science and Computational Intelligence 1: 1–17. [Google Scholar] [CrossRef]
- Peraza-Vázquez, H., A. Peña-Delgado, P. Ranjan, C. Barde, A. Choubey, and A.B. Morales-Cepeda. 2021. A Bio-Inspired Method for Mathematical Optimization Inspired by Arachnida Salticidade. Mathematics 10: 102. [Google Scholar] [CrossRef]
- Legg, S., and M. Hutter. 2006. A Formal Measure of Machine Intelligence. arXiv arXiv:cs/0605024. [Google Scholar]
- Hao, S., Y. Gu, H. Ma, J.J. Hong, Z. Wang, D.Z. Wang, and Z. Hu. 2023. Reasoning with Language Model Is Planning with World Model. arXiv arXiv:2305.14992. [Google Scholar]
- Mashburn, C.A., A.P. Burgoyne, and R.W. Engle. 2023. Working Memory, Intelligence, and Life Success. In Memory in Science for Society: There Is Nothing As Practical As a Good Theory. Oxford University Press: p. 149. [Google Scholar]
- Smith, J.D., J.J. Couchman, and M.J. Beran. 2014. Animal Metacognition: A Tale of Two Comparative Psychologies. Journal of Comparative Psychology 128: 115–131. [Google Scholar] [CrossRef] [PubMed]
- Rosen, R. 1991. Life Itself: A Comprehensive Inquiry into the Nature, Origin, and Fabrication of Life. Complexity in Ecological Systems Series; New York: Columbia University Press. [Google Scholar]
- Maier, H., J. Guillaume, H. Van Delden, G. Riddell, M. Haasnoot, and J. Kwakkel. 2016. An Uncertain Future, Deep Uncertainty, Scenarios, Robustness and Adaptation: How Do They Fit Together? Environmental Modelling & Software 81: 154–164. [Google Scholar] [CrossRef]
- Walker, W., M. Haasnoot, and J. Kwakkel. 2013. Adapt or Perish: A Review of Planning Approaches for Adaptation under Deep Uncertainty. Sustainability 5: 955–979. [Google Scholar] [CrossRef]
- Simon, H.A. 1956. Rational Choice and the Structure of the Environment. Psychological Review 63: 129–138. [Google Scholar] [CrossRef]
- Hayes-Roth, B., and A. Collinot. 1994. A Satisficing Cycle for Real-Time Reasoning in Intelligent Agents. Expert Systems with Applications 7: 31–42. [Google Scholar] [CrossRef]
- Bossaerts, P., and C. Murawski. 2017. Computational Complexity and Human Decision-Making. Trends in Cognitive Sciences 21: 917–929. [Google Scholar] [CrossRef]
- Sutton, R.S., and A. Barto. 2020. Reinforcement learning: an introduction, Adaptive computation and machine learning, 2nd ed. Cambridge, Massachusetts London, England: The MIT Press. [Google Scholar]
- Firestone, C. 2020. Performance vs. Competence in Human–Machine Comparisons. Proceedings of the National Academy of Sciences 117: 26562–26571. [Google Scholar] [CrossRef]
- Kryven, M., T.D. Ullman, W. Cowan, and J.B. Tenenbaum. 2021. Plans or Outcomes: How Do We Attribute Intelligence to Others? Cognitive Science 45: e13041. [Google Scholar] [CrossRef]
- Beckmann, J.F., D.P. Birney, and N. Goode. 2017. Beyond Psychometrics: The Difference between Difficult Problem Solving and Complex Problem Solving. Frontiers in Psychology 8: 1739. [Google Scholar] [CrossRef]
- Pelánek, R., T. Effenberger, and J. Čechák. 2022. Complexity and Difficulty of Items in Learning Systems. International Journal of Artificial Intelligence in Education 32: 196–232. [Google Scholar] [CrossRef]
- Benedetto, L., P. Cremonesi, A. Caines, P. Buttery, A. Cappelli, A. Giussani, and R. Turrin. 2023. A Survey on Recent Approaches to Question Difficulty Estimation from Text. ACM Computing Surveys, vol. 55, pp. 1–37. [Google Scholar] [CrossRef]
- Horn, J.L., and R.B. Cattell. 1967. Age Differences in Fluid and Crystallized Intelligence. Acta Psychologica 26: 107–129. [Google Scholar] [CrossRef] [PubMed]
- Nisbett, R.E., J. Aronson, C. Blair, W. Dickens, J. Flynn, D.F. Halpern, and E. Turkheimer. 2012. Intelligence: New Findings and Theoretical Developments. American Psychologist 67: 130–159. [Google Scholar] [CrossRef] [PubMed]
- Chai, L.R., A.N. Khambhati, R. Ciric, T.M. Moore, R.C. Gur, R.E. Gur, T.D. Satterthwaite, and D.S. Bassett. 2017. Evolution of Brain Network Dynamics in Neurodevelopment. Network Neuroscience 1: 14–30. [Google Scholar] [CrossRef]
- Salthouse, T. 2012. Consequences of Age-Related Cognitive Declines. Annual Review of Psychology 63: 201–226. [Google Scholar] [CrossRef]
- Hartshorne, J.K., and L.T. Germine. 2015. When Does Cognitive Functioning Peak? The Asynchronous Rise and Fall of Different Cognitive Abilities Across the Life Span. Psychological Science 26: 433–443. [Google Scholar] [CrossRef] [PubMed]
- Tucker-Drob, E.M., A.M. Brandmaier, and U. Lindenberger. 2019. Coupled Cognitive Changes in Adulthood: A Meta-Analysis. Psychological Bulletin 145: 273–301. [Google Scholar] [CrossRef]
- Hall, J.P.J., M.A. Brockhurst, and E. Harrison. 2017. Sampling the Mobile Gene Pool: Innovation via Horizontal Gene Transfer in Bacteria. Philosophical Transactions of the Royal Society B: Biological Sciences 372: 20160424. [Google Scholar] [CrossRef]
- Krause, J., G.D. Ruxton, and S. Krause. 2010. Swarm Intelligence in Animals and Humans. Trends in Ecology & Evolution 25: 28–34. [Google Scholar] [CrossRef]
- Biro, D., M. Haslam, and C. Rutz. 2013. Tool Use as Adaptation. Philosophical Transactions of the Royal Society B: Biological Sciences 368: 20120408. [Google Scholar] [CrossRef]
- McMillen, P., and M. Levin. 2024. Collective Intelligence: A Unifying Concept for Integrating Biology across Scales and Substrates. Communications Biology 7: 378. [Google Scholar] [CrossRef]
- Couzin, I.D. 2009. Collective Cognition in Animal Groups. Trends in Cognitive Sciences 13: 36–43. [Google Scholar] [CrossRef] [PubMed]
- Pacala, S.W., D.M. Gordon, and H.C.J. Godfray. 1996. Effects of Social Group Size on Information Transfer and Task Allocation. Evolutionary Ecology 10: 127–165. [Google Scholar] [CrossRef]
- Tirole, J. 2011. The Theory of Industrial Organization, 18th print ed. Cambridge (Mass.): The MIT Press. [Google Scholar]
- Lee, E.D., J.C. Flack, and D.C. Krakauer. 2023. Outsourcing Memory Through Niche Construction. arXiv arXiv:2209.00476v2. [Google Scholar]
- Migliano, A.B., and L. Vinicius. 2022. The Origins of Human Cumulative Culture: From the Foraging Niche to Collective Intelligence. Philosophical Transactions of the Royal Society B: Biological Sciences 377: 20200317. [Google Scholar] [CrossRef]
- Henrich, J., and M. Muthukrishna. 2023. What Makes Us Smart? Topics in Cognitive Science 16: tops.12656. [Google Scholar] [CrossRef] [PubMed]
- Gould, S.J. 1981. The Mismeasure of Man. New York: Norton. [Google Scholar]
- Herrnstein, R.J., and C.A. Murray. 1994. The Bell Curve: Intelligence and Class Structure in American Life. New York: Free Press. [Google Scholar]
- Chiappe, D., and K. MacDonald. 2005. The Evolution of Domain-General Mechanisms in Intelligence and Learning. The Journal of General Psychology 132: 5–40. [Google Scholar] [CrossRef]
- Lazer, D., and A. Friedman. 2007. The Network Structure of Exploration and Exploitation. Administrative Science Quarterly 52: 667–694. [Google Scholar] [CrossRef]
- Gabora, L., and A. Russon. 2011. The Evolution of Intelligence. In The Cambridge Handbook of Intelligence, 1 ed. Edited by R.J. Sternberg and S.B. Kaufman. Cambridge University Press: pp. 328–350. [Google Scholar] [CrossRef]
- Plomin, R., and I.J. Deary. 2015. Genetics and Intelligence Differences: Five Special Findings. Molecular Psychiatry 20: 98–108. [Google Scholar] [CrossRef]
- Craik, F.I., and E. Bialystok. 2006. Cognition through the Lifespan: Mechanisms of Change. Trends in Cognitive Sciences 10: 131–138. [Google Scholar] [CrossRef]
- Sabb, F., A. Burggren, R. Higier, J. Fox, J. He, D. Parker, R. Poldrack, W. Chu, T. Cannon, N. Freimer, and et al. 2009. Challenges in Phenotype Definition in the Whole-Genome Era: Multivariate Models of Memory and Intelligence. Neuroscience 164: 88–107. [Google Scholar] [CrossRef]
- Savage, J.E., P.R. Jansen, S. Stringer, K. Watanabe, J. Bryois, C.A. De Leeuw, M. Nagel, S. Awasthi, P.B. Barr, J.R.I. Coleman, and et al. 2018. Genome-Wide Association Meta-Analysis in 269,867 Individuals Identifies New Genetic and Functional Links to Intelligence. Nature Genetics 50: 912–919. [Google Scholar] [CrossRef]
- Adami, C. 2002. What Is Complexity? BioEssays 24: 1085–1094. [Google Scholar] [CrossRef] [PubMed]
- Krakauer, D.C. 2011. Darwinian Demons, Evolutionary Complexity, and Information Maximization. Chaos: An Interdisciplinary Journal of Nonlinear Science 21: 037110. [Google Scholar] [CrossRef]
- Arnold, S.J. 1983. Morphology, Performance and Fitness. American Zoologist 23: 347–361. [Google Scholar] [CrossRef]
- Mattar, M.G., and M. Lengyel. 2022. Planning in the Brain. Neuron 110: 914–934. [Google Scholar] [CrossRef]
- McShea, D.W. 1996. Perspective: Metazoan Complexity and Evolution: Is There a Trend? Evolution 50: 477. [Google Scholar] [CrossRef]
- Tkačik, G., and W. Bialek. 2016. Information Processing in Living Systems. Annual Review of Condensed Matter Physics 7: 89–117. [Google Scholar] [CrossRef]
- Woodward, P.M. 1964. Probability and Information Theory, with Applications to Radar, Number 3 in International Series of Monographs on Electronics and Instrumentation, 2nd ed. Burlington, VT: Elsevier Science Pergamon Press. [Google Scholar]
- Kharkevich, A. 1960. On the Value of Information. Probl. Kibernetiki 4: 53–57. [Google Scholar]
- Deffner, D. 2023. Constructing `on Purpose’: How Niche Construction Affects Natural Selection. In Evolution "On Purpose": Teleonomy in Living Systems. Edited by P. Corning, S. Kauffman, D. Noble, J. Shapiro, R. Vane-Wright and A. Pross. MIT Press: pp. 59–77. [Google Scholar] [CrossRef]
- Stearns, S.C. 2000. Life History Evolution: Successes, Limitations, and Prospects. Naturwissenschaften 87: 476–486. [Google Scholar] [CrossRef]
- Kaplan, H., K. Hill, J. Lancaster, and A.M. Hurtado. 2000. A Theory of Human Life History Evolution: Diet, Intelligence, and Longevity. Evolutionary Anthropology: Issues, News, and Reviews 9: 156–185. [Google Scholar] [CrossRef]
- Wong, M.L., C.E. Cleland, D. Arend, S. Bartlett, H.J. Cleaves, H. Demarest, A. Prabhu, J.I. Lunine, and R.M. Hazen. 2023. On the Roles of Function and Selection in Evolving Systems. Proceedings of the National Academy of Sciences 120: e2310223120. [Google Scholar] [CrossRef] [PubMed]
- Duéñez-Guzmán, E.A., S. Sadedin, J.X. Wang, K.R. McKee, and J.Z. Leibo. 2023. A Social Path to Human-like Artificial Intelligence. Nature Machine Intelligence 5: 1181–1188. [Google Scholar] [CrossRef]
- Edelman, G.M., and J.A. Gally. 2001. Degeneracy and Complexity in Biological Systems. Proceedings of the National Academy of Sciences 98: 13763–13768. [Google Scholar] [CrossRef] [PubMed]
- Barrett, H.C., and R. Kurzban. 2006. Modularity in Cognition: Framing the Debate. Psychological Review 113: 628–647. [Google Scholar] [CrossRef]
- Tria, F., V. Loreto, V.D.P. Servedio, and S.H. Strogatz. 2014. The Dynamics of Correlated Novelties. Scientific Reports 4: 5890. [Google Scholar] [CrossRef]
- Klyubin, A., D. Polani, and C. Nehaniv. Empowerment: A Universal Agent-Centric Measure of Control. In Proceedings of the 2005 IEEE Congress on Evolutionary Computation, Edinburgh, Scotland, UK, 2005, Vol. 1, pp. 128–135. [Google Scholar] [CrossRef]
- Pearl, J., and D. Mackenzie. 2018. The Book of Why: The New Science of Cause and Effect, first edition. New York: Basic Books. [Google Scholar]
- Frank, S.A. 2009. Natural Selection Maximizes Fisher Information. Journal of Evolutionary Biology 22: 231–244. [Google Scholar] [CrossRef]
- Zaman, L., J.R. Meyer, S. Devangam, D.M. Bryson, R.E. Lenski, and C. Ofria. 2014. Coevolution Drives the Emergence of Complex Traits and Promotes Evolvability. PLoS Biology 12: e1002023. [Google Scholar] [CrossRef]
- Xue, B., P. Sartori, and S. Leibler. 2019. Environment-to-Phenotype Mapping and Adaptation Strategies in Varying Environments. Proceedings of the National Academy of Sciences 116: 13847–13855. [Google Scholar] [CrossRef]
- Li, S.C., U. Lindenberger, B. Hommel, G. Aschersleben, W. Prinz, and P.B. Baltes. 2004. Transformations in the Couplings Among Intellectual Abilities and Constituent Cognitive Processes Across the Life Span. Psychological Science 15: 155–163. [Google Scholar] [CrossRef]
- Whiten, A., and C.P. Van Schaik. 2007. The Evolution of Animal `Cultures’ and Social Intelligence. Philosophical Transactions of the Royal Society B: Biological Sciences 362: 603–620. [Google Scholar] [CrossRef]
- Flavell, J.H. 1979. Metacognition and Cognitive Monitoring: A New Area of Cognitive–Developmental Inquiry. American Psychologist 34: 906–911. [Google Scholar] [CrossRef]
- Rogers, E.M. 2014. Diffusion of Innovations, 5th Edition ed. Place of publication not identified: Free Press. [Google Scholar]
- Schnell, A.K., P. Amodio, M. Boeckle, and N.S. Clayton. 2021. How Intelligent Is a Cephalopod? Lessons from Comparative Cognition. Biological Reviews 96: 162–178. [Google Scholar] [CrossRef] [PubMed]
- Zacks, O., S. Ginsburg, and E. Jablonka. 2022. The Futures of the Past The Evolution of Imaginative Animals. Journal of Consciousness Studies 29: 29–61. [Google Scholar] [CrossRef]
- Hochberg, M.E., P.A. Marquet, R. Boyd, and A. Wagner. 2017. Innovation: An Emerging Focus from Cells to Societies. Philosophical Transactions of the Royal Society B: Biological Sciences 372: 20160414. [Google Scholar] [CrossRef]
- Laland, K., B. Matthews, and M.W. Feldman. 2016. An Introduction to Niche Construction Theory. Evolutionary Ecology 30: 191–202. [Google Scholar] [CrossRef]
- Brandon, R., J. Antonovics, and R. Brandon, eds. 1996. The Coevolution of Organism and Environment. In Concepts and Methods in Evolutionary Biology. New York, N.Y: Cambridge University Press, pp. 161–178. [Google Scholar]
- Calvo, P., and F. Baluška. 2015. Conditions for Minimal Intelligence across Eukaryota: A Cognitive Science Perspective. Frontiers in Psychology 6: 1329. [Google Scholar] [CrossRef]
- Kaufmann, R., P. Gupta, and J. Taylor. 2021. An Active Inference Model of Collective Intelligence. Entropy 23: 830. [Google Scholar] [CrossRef]
- Leonard, N.E., and S.A. Levin. 2022. Collective Intelligence as a Public Good. Collective Intelligence 1: 263391372210832. [Google Scholar] [CrossRef]
- Rueffler, C., J. Hermisson, and G.P. Wagner. 2012. Evolution of Functional Specialization and Division of Labor. Proceedings of the National Academy of Sciences 109: E326–35. [Google Scholar] [CrossRef]
- West, S.A., R.M. Fisher, A. Gardner, and E.T. Kiers. 2015. Major Evolutionary Transitions in Individuality. Proceedings of the National Academy of Sciences 112: 10112–10119. [Google Scholar] [CrossRef]
- Hochberg, M.E., D.J. Rankin, and M. Taborsky. 2008. The Coevolution of Cooperation and Dispersal in Social Groups and Its Implications for the Emergence of Multicellularity. BMC Evolutionary Biology 8: 238. [Google Scholar] [CrossRef] [PubMed]
- Gorelick, R., S.M. Bertram, P.R. Killeen, and J.H. Fewell. 2004. Normalized Mutual Entropy in Biology: Quantifying Division of Labor. The American Naturalist 164: 677–682. [Google Scholar] [CrossRef]
- Gebauer, D., J.D. Gale, and H. Cölfen. 2022. Crystal Nucleation and Growth of Inorganic Ionic Materials from Aqueous Solution: Selected Recent Developments, and Implications. Small 18: 2107735. [Google Scholar] [CrossRef] [PubMed]
- Morowitz, H.J. 2002. The Emergence of Everything: How the World Became Complex. New York: Oxford University Press. [Google Scholar]
- Smith, E., and H.J. Morowitz. 2016. The Origin and Nature of Life on Earth: The Emergence of the Fourth Geosphere, 1 ed. Cambridge University Press. [Google Scholar] [CrossRef]
- Roth, G. 2015. Convergent Evolution of Complex Brains and High Intelligence. Philosophical Transactions of the Royal Society B: Biological Sciences 370: 20150049. [Google Scholar] [CrossRef] [PubMed]
- Dussutour, A., Q. Ma, and D. Sumpter. 2019. Phenotypic Variability Predicts Decision Accuracy in Unicellular Organisms. Proceedings of the Royal Society B: Biological Sciences 286: 20182825. [Google Scholar] [CrossRef]
- Calvo, P., M. Gagliano, G.M. Souza, and A. Trewavas. 2020. Plants Are Intelligent, Here’s How. Annals of Botany 125: 11–28. [Google Scholar] [CrossRef]
- Reber, A.S., F. Baluška, and W. Miller. 2023. The Sentient Cell: The Cellular Foundations of Consciousness. New York: Oxford University Press. [Google Scholar]
- Chevin, L.M., and A.A. Hoffmann. 2017. Evolution of Phenotypic Plasticity in Extreme Environments. Philosophical Transactions of the Royal Society B: Biological Sciences 372: 20160138. [Google Scholar] [CrossRef]
- Muñoz, M.M. 2022. The Bogert Effect, a Factor in Evolution. Evolution 76: 49–66. [Google Scholar] [CrossRef]
- Sinz, F.H., X. Pitkow, J. Reimer, M. Bethge, and A.S. Tolias. 2019. Engineering a Less Artificial Intelligence. Neuron 103: 967–979. [Google Scholar] [CrossRef]
- Lachmann, M., and S. Walker. 2019. Life ≠ Alive. Aeon. [Google Scholar]
- Bengio, Y., G. Hinton, A. Yao, D. Song, P. Abbeel, T. Darrell, Y.N. Harari, Y.Q. Zhang, L. Xue, S. Shalev-Shwartz, and et al. 2024. Managing Extreme AI Risks amid Rapid Progress. Science 384: 842–845. [Google Scholar] [CrossRef] [PubMed]
- Kinniment, M., L.J.K. Sato, H. Du, B. Goodrich, M. Hasin, L. Chan, L.H. Miles, T.R. Lin, H. Wijk, J. Burget, and et al. 2023. Evaluating Language-Model Agents on Realistic Autonomous Tasks. arXiv arXiv:2312.11671. [Google Scholar]
- Shadmehr, R., M.A. Smith, and J.W. Krakauer. 2010. Error Correction, Sensory Prediction, and Adaptation in Motor Control. Annual Review of Neuroscience 33: 89–108. [Google Scholar] [CrossRef]
- Metcalfe, J. 2017. Learning from Errors. Annual Review of Psychology 68: 465–489. [Google Scholar] [CrossRef]
- Chu, J., and L.E. Schulz. 2020. Play, Curiosity, and Cognition. Annual Review of Developmental Psychology 2: 317–343. [Google Scholar] [CrossRef]
- Gibson, K. 1991. Tools, Language and Intelligence: Evolutionary Implications. Man 26: 255. [Google Scholar] [CrossRef]
- Tennie, C., J. Call, and M. Tomasello. 2009. Ratcheting up the Ratchet: On the Evolution of Cumulative Culture. Philosophical Transactions of the Royal Society B: Biological Sciences 364: 2405–2415. [Google Scholar] [CrossRef]
- Pagel, M. 2012. Adapted to Culture. Nature 482: 297–299. [Google Scholar] [CrossRef]
- Kaplan, H.S., and A.J. Robson. 2002. The Emergence of Humans: The Coevolution of Intelligence and Longevity with Intergenerational Transfers. Proceedings of the National Academy of Sciences 99: 10221–10226. [Google Scholar] [CrossRef]
- Laland, K., and A. Seed. 2021. Understanding Human Cognitive Uniqueness. Annual Review of Psychology 72: 689–716. [Google Scholar] [CrossRef]
- Gibson, K.R. 2002. Evolution of Human Intelligence: The Roles of Brain Size and Mental Construction. Brain, Behavior and Evolution 59: 10–20. [Google Scholar] [CrossRef] [PubMed]
- Muthukrishna, M., M. Doebeli, M. Chudek, and J. Henrich. 2018. The Cultural Brain Hypothesis: How Culture Drives Brain Expansion, Sociality, and Life History. PLOS Computational Biology 14: e1006504. [Google Scholar] [CrossRef]
- Sternberg, R.J. 2004. Culture and Intelligence. American Psychologist 59: 325–338. [Google Scholar] [CrossRef] [PubMed]
- Tomasello, M. 2001. Cultural Transmission: A View from Chimpanzees and Human Infants. Journal of Cross-Cultural Psychology 32: 135–146. [Google Scholar] [CrossRef]
- Brinkmann, L., F. Baumann, J.F. Bonnefon, M. Derex, T.F. Müller, A.M. Nussberger, A. Czaplicka, A. Acerbi, T.L. Griffiths, J. Henrich, and et al. 2023. Machine Culture. Nature Human Behaviour 7: 1855–1868. [Google Scholar] [CrossRef]
- Krakauer, D., N. Bertschinger, E. Olbrich, J.C. Flack, and N. Ay. 2020. The Information Theory of Individuality. Theory in Biosciences 139: 209–223. [Google Scholar] [CrossRef] [PubMed]
- Rainey, P.B. 2023. Major Evolutionary Transitions in Individuality between Humans and AI. Philosophical Transactions of the Royal Society B: Biological Sciences 378: 20210408. [Google Scholar] [CrossRef]
- Perreault, C. 2012. The Pace of Cultural Evolution. PLoS ONE 7: e45150. [Google Scholar] [CrossRef]
- Turing, A.M.I. 1950. —COMPUTING MACHINERY AND INTELLIGENCE. Mind LIX: 433–460. [Google Scholar] [CrossRef]
- Lee, E.D., C.P. Kempes, and G.B. West. 2024. Idea Engines: Unifying Innovation & Obsolescence from Markets & Genetic Evolution to Science. Proceedings of the National Academy of Sciences 121: e2312468120. [Google Scholar] [CrossRef]
- Cazzolla Gatti, R., R. Koppl, B.D. Fath, S. Kauffman, W. Hordijk, and R.E. Ulanowicz. 2020. On the Emergence of Ecological and Economic Niches. Journal of Bioeconomics 22: 99–127. [Google Scholar] [CrossRef]
Figure 1.
A – Hypothetical relationships between the concepts of solving and planning. The clines refer to progressive intelligence milestones in abilities to address complexity. Trajectory i is gains in intelligence mostly due to solving, whereas ii is dominated by planning. Trajectory iii, which initially favors solving and gradually favors planning is the most efficient of the three examples, leading to higher marginal and overall gains in milestones. Note that the three trajectories are different rotations of the same curve. B – Time courses of path node changes for three hypothetical scenarios. Each point (node = subgoal) corresponds to goal-related information gained in the path (represented by a continuous line). Goal resolution is indicated by an open circle. i: Monotonic decrease in path node changes leading to an intermediate resolution time (efficiency). ii: Complex trajectory in path node change, with transient information loss, subsequent discovery of a more accurate path and a consequential delay in (off graph) resolution. iii: Efficient path corresponding to a rapid resolution.
Figure 1.
A – Hypothetical relationships between the concepts of solving and planning. The clines refer to progressive intelligence milestones in abilities to address complexity. Trajectory i is gains in intelligence mostly due to solving, whereas ii is dominated by planning. Trajectory iii, which initially favors solving and gradually favors planning is the most efficient of the three examples, leading to higher marginal and overall gains in milestones. Note that the three trajectories are different rotations of the same curve. B – Time courses of path node changes for three hypothetical scenarios. Each point (node = subgoal) corresponds to goal-related information gained in the path (represented by a continuous line). Goal resolution is indicated by an open circle. i: Monotonic decrease in path node changes leading to an intermediate resolution time (efficiency). ii: Complex trajectory in path node change, with transient information loss, subsequent discovery of a more accurate path and a consequential delay in (off graph) resolution. iii: Efficient path corresponding to a rapid resolution.
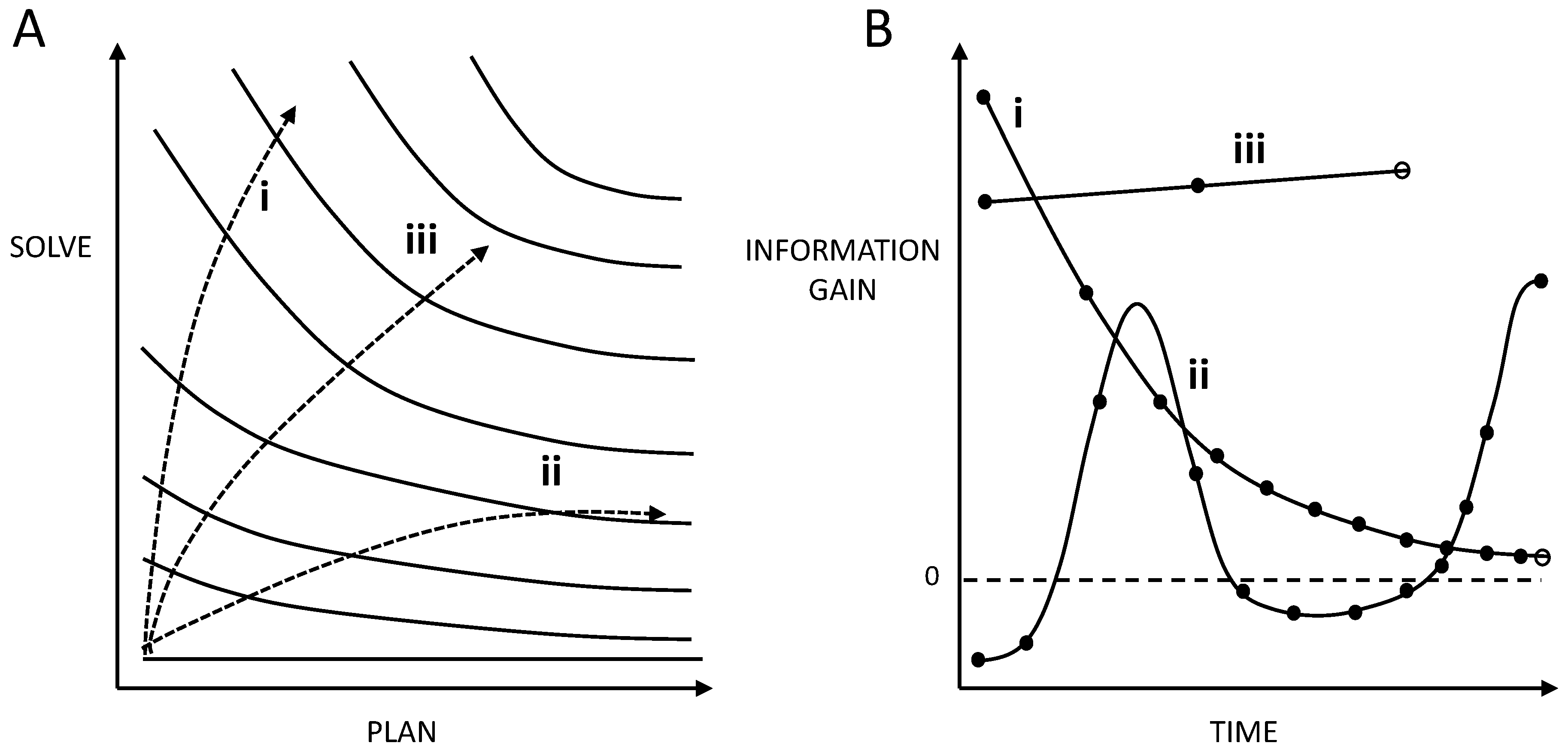
Figure 2.
The intelligence niche. Shown are representations borrowed from the ecological and evolutionary sciences. In the present context, the boundaries are expected to be fuzzy and the areas correspond to probability surfaces. The fundamental niche of a system (or a species) is the set of possible conditions for which the population can persist. Conditions include contexts, environments and goal types. The realized niche is the set of conditions under which the individual or population actually operates due to limited contexts, goal types/choices, and environments experienced. The fundamental intelligence niche can be extended via some combination of transmission (learning, experience) or system evolution. Proxies can extend the realized niche, either within the fundamental niche (augmentation of existing capacities) or through the invention of new niches. New niches therefore emerge as a system innovation (e.g., cognition, language...) or extension of the individual system (e.g., social, technology...), possibly resulting in a discontinuity or transition in intelligence. T - E: transmission and evolution.
Figure 2.
The intelligence niche. Shown are representations borrowed from the ecological and evolutionary sciences. In the present context, the boundaries are expected to be fuzzy and the areas correspond to probability surfaces. The fundamental niche of a system (or a species) is the set of possible conditions for which the population can persist. Conditions include contexts, environments and goal types. The realized niche is the set of conditions under which the individual or population actually operates due to limited contexts, goal types/choices, and environments experienced. The fundamental intelligence niche can be extended via some combination of transmission (learning, experience) or system evolution. Proxies can extend the realized niche, either within the fundamental niche (augmentation of existing capacities) or through the invention of new niches. New niches therefore emerge as a system innovation (e.g., cognition, language...) or extension of the individual system (e.g., social, technology...), possibly resulting in a discontinuity or transition in intelligence. T - E: transmission and evolution.
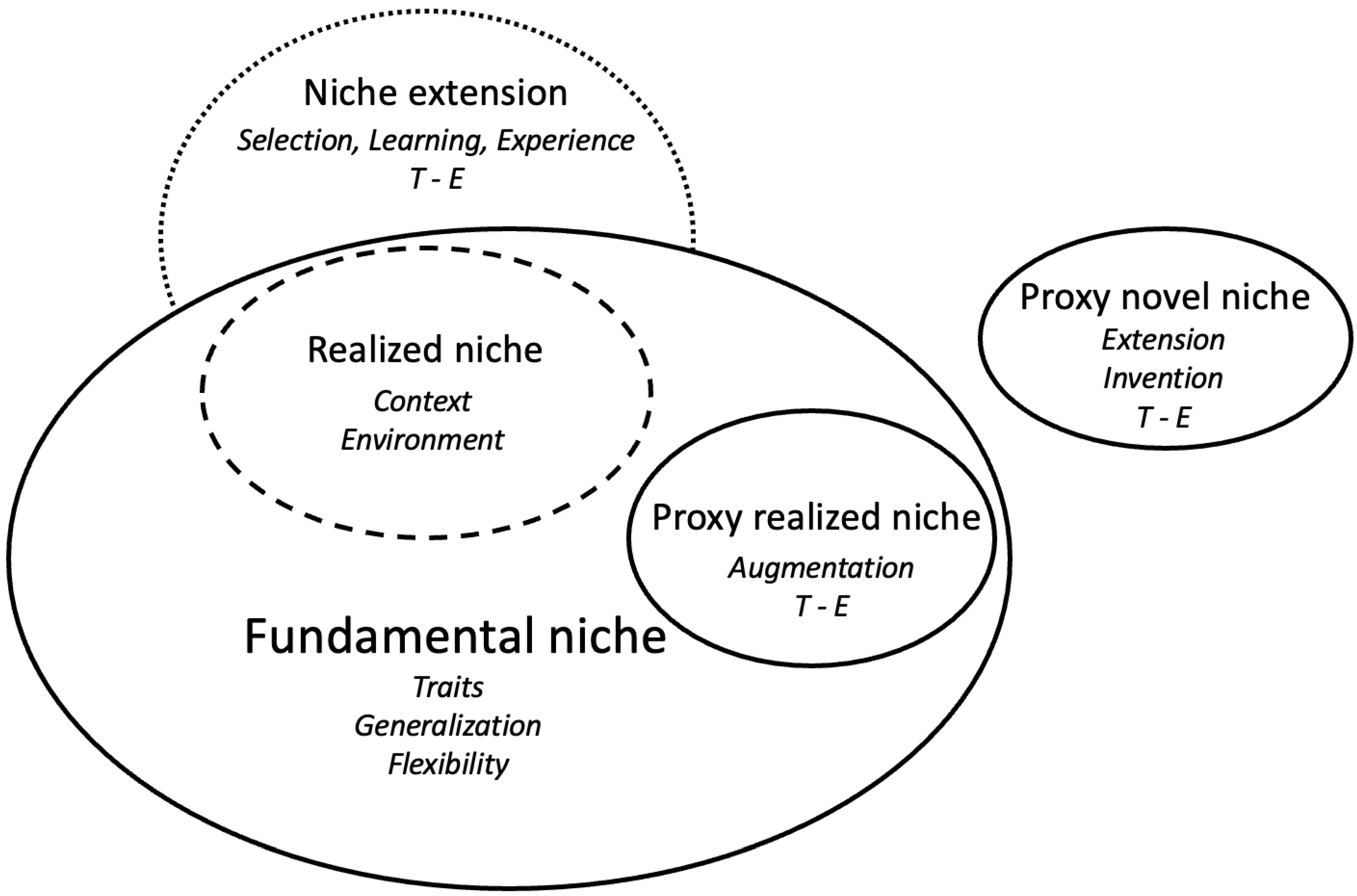
Figure 3.
Hypothetical representation of how intelligence abilities respond (payoff or fitness) to goal complexity. Curve i corresponds to solving abilities only, which are effective over a limited range of lower goal complexities. Curve i+ii corresponds to the emergence of basic-level planning together with existing solving, which increases capacities compared to solving alone. Curve i+ii+ii is higher level planning at sufficiently high goal complexity, together with basic-level planning and solving. Achievement is some combination accuracy and efficiency (e.g., indicator (3a)). Higher ability levels only emerge when scaffolding already exists and evolutionary benefits of innovations exceed costs. See main text for discussion.
Figure 3.
Hypothetical representation of how intelligence abilities respond (payoff or fitness) to goal complexity. Curve i corresponds to solving abilities only, which are effective over a limited range of lower goal complexities. Curve i+ii corresponds to the emergence of basic-level planning together with existing solving, which increases capacities compared to solving alone. Curve i+ii+ii is higher level planning at sufficiently high goal complexity, together with basic-level planning and solving. Achievement is some combination accuracy and efficiency (e.g., indicator (3a)). Higher ability levels only emerge when scaffolding already exists and evolutionary benefits of innovations exceed costs. See main text for discussion.
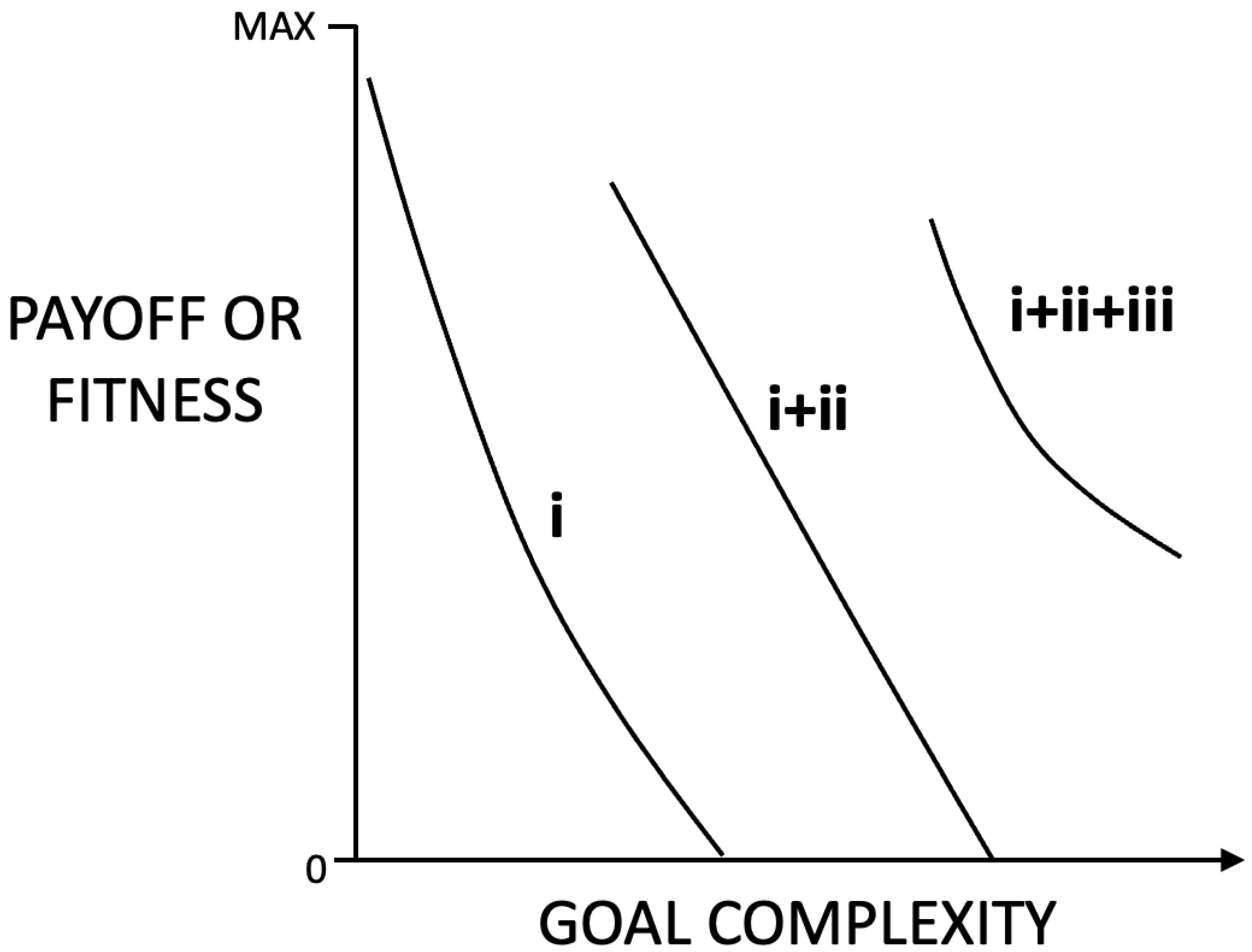
Figure 4.
Hypothetical examples of sequential nodes n in normalized solving and planning inspired by indices (1b) and (2b). The maximally accurate solution is denoted O. Path trajectories are assumed to reflect abilities by the direction and length of arrows and the number of nodes from start (S) to resolution (A, B, C or O). The segments from S to O reflect an efficient and accurate resolution. The single jump trajectory to a poor resolution at A (lower information, slightly greater planning accuracy) is due to low solving ability. The comparatively greater number of smaller segments from S to the partial resolution at B is due in particular to low planning ability. Finally, different nodal paths can produce a similar final outcome (S-C and S-O). These examples are oversimplifications of real process, and intended to illustrate reconstructions of goal resolutions under TIS. See main text for further explanation.
Figure 4.
Hypothetical examples of sequential nodes n in normalized solving and planning inspired by indices (1b) and (2b). The maximally accurate solution is denoted O. Path trajectories are assumed to reflect abilities by the direction and length of arrows and the number of nodes from start (S) to resolution (A, B, C or O). The segments from S to O reflect an efficient and accurate resolution. The single jump trajectory to a poor resolution at A (lower information, slightly greater planning accuracy) is due to low solving ability. The comparatively greater number of smaller segments from S to the partial resolution at B is due in particular to low planning ability. Finally, different nodal paths can produce a similar final outcome (S-C and S-O). These examples are oversimplifications of real process, and intended to illustrate reconstructions of goal resolutions under TIS. See main text for further explanation.
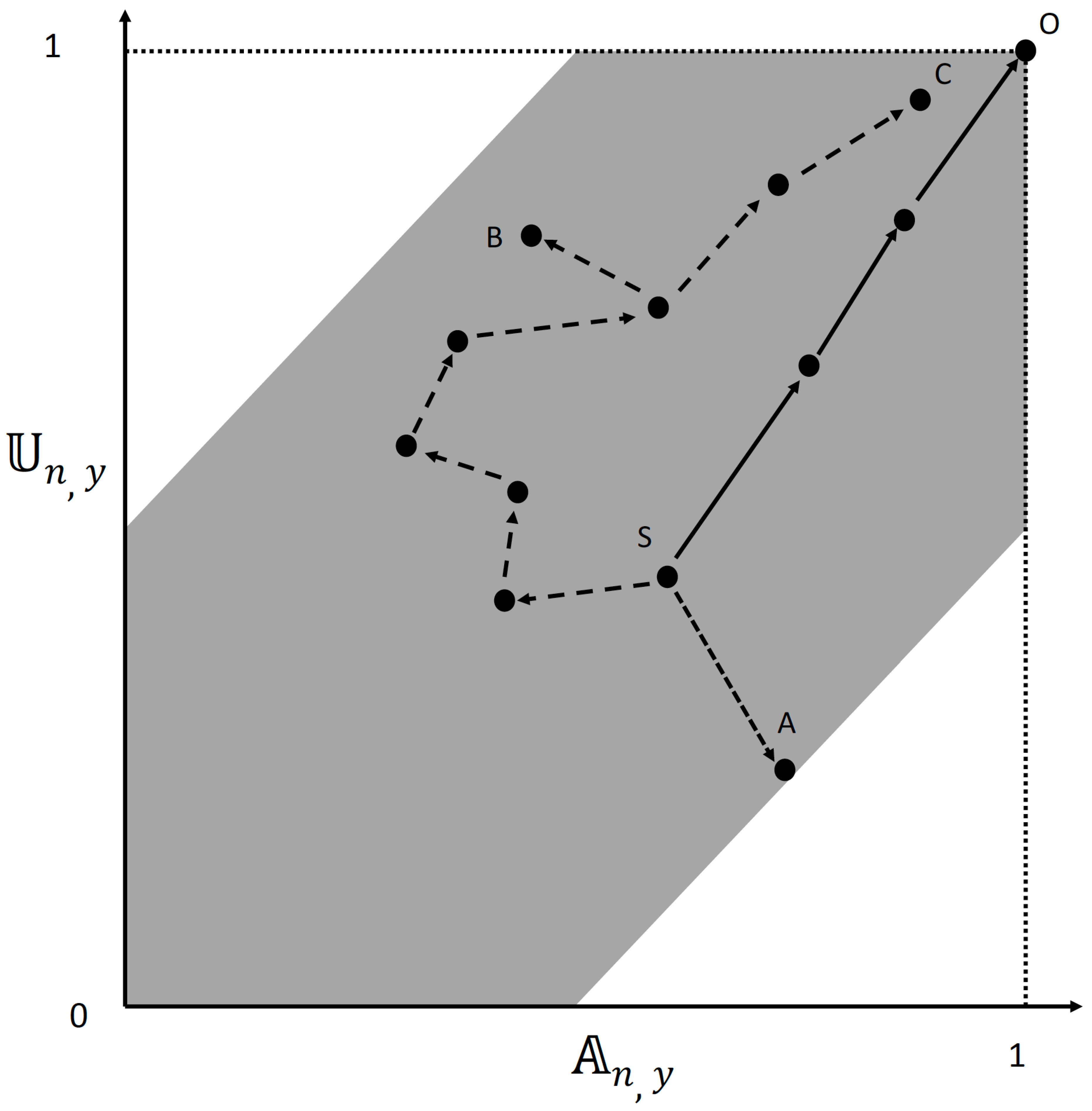
Figure 5.
Schematic diagram of the TIS framework. The core system interacts with the environment both in reacting to challenges and in setting and addressing goals in their difficulty and novelty, and in so doing, reduces sub-goal uncertainty and possibly plans to improve paths to goal resolution. The system is composed of the controller, processor and memory. The controller generates goal-directed information based on generic abilities (Generic Operators, Table 1) and how these abilities are instrumentalized via the processor. Extended system phenotypes are proxies such as social interactions and technology. Intelligence can be codified in the system as one or more of organization, processes (abilities), stored memory, and either hard-wired or plastic behaviors. Intelligence can also be codified outside the system in (non-mutually exclusive) proxies, such as collectives, society, culture, artifacts, technology and institutions. The extended intelligence system at any given time is a compendium of past intelligence trait evolution and priors, system life history, self-learned knowledge and skills, and transmission of knowledge and skills from other systems, including proxies.
Figure 5.
Schematic diagram of the TIS framework. The core system interacts with the environment both in reacting to challenges and in setting and addressing goals in their difficulty and novelty, and in so doing, reduces sub-goal uncertainty and possibly plans to improve paths to goal resolution. The system is composed of the controller, processor and memory. The controller generates goal-directed information based on generic abilities (Generic Operators, Table 1) and how these abilities are instrumentalized via the processor. Extended system phenotypes are proxies such as social interactions and technology. Intelligence can be codified in the system as one or more of organization, processes (abilities), stored memory, and either hard-wired or plastic behaviors. Intelligence can also be codified outside the system in (non-mutually exclusive) proxies, such as collectives, society, culture, artifacts, technology and institutions. The extended intelligence system at any given time is a compendium of past intelligence trait evolution and priors, system life history, self-learned knowledge and skills, and transmission of knowledge and skills from other systems, including proxies.
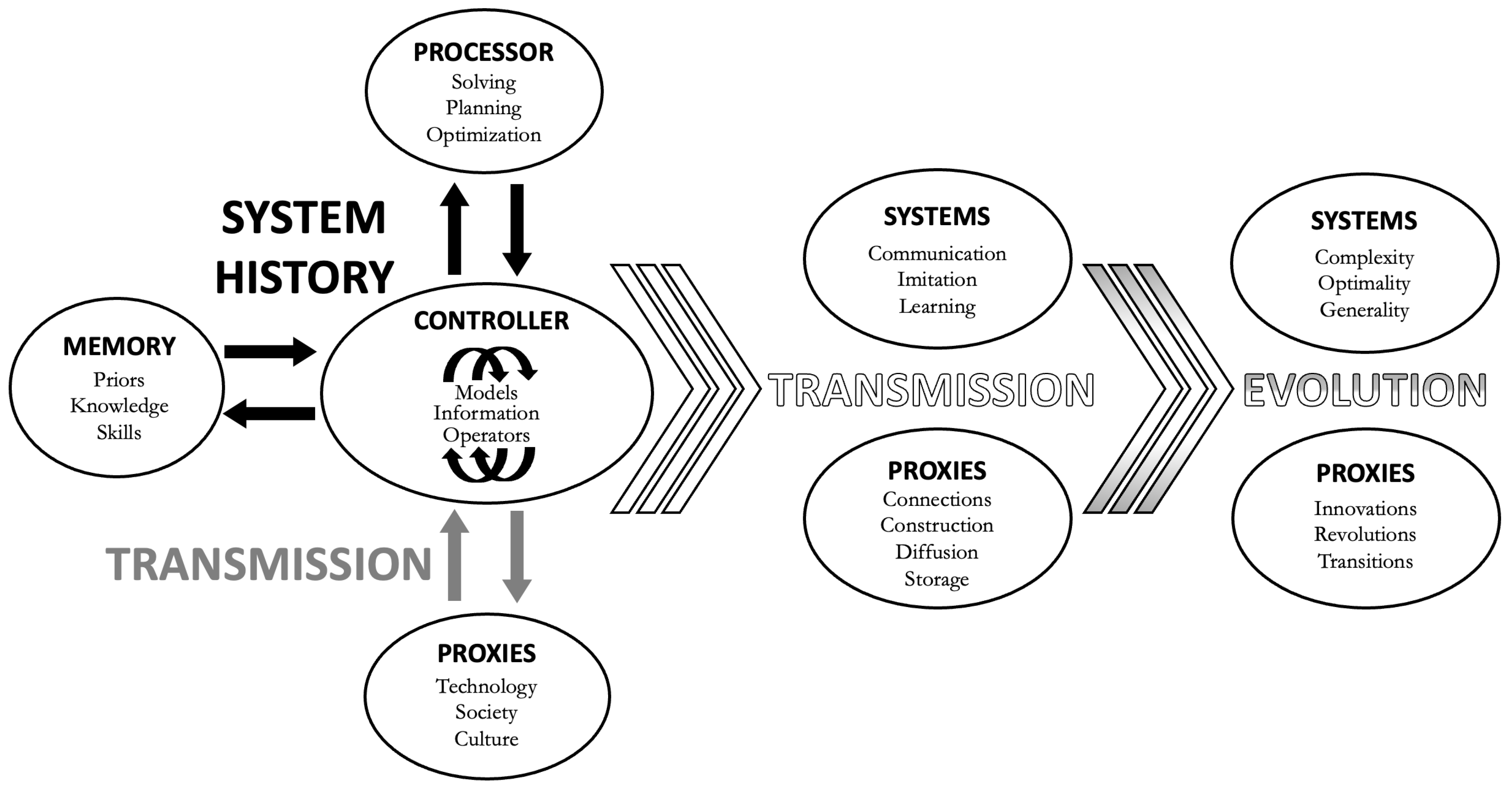

Table 1.
The Theory of Intelligences is based on functions and associated abilities. Operators, instruments and maximizers are partitioned into hypothesized ability levels associated with system complexity. Each ability could have variants of at multiple levels and the table only lists each with their (hypothetically) most basal level. Abilities included in TIS indices are indicated in italics. System types associated with each feature are given, with uncertain or partial assignments indicated by parentheses. P=natural physical; AI=artificial intelligence; B1=unicellular, multicellular fungi and plants, invertebrate animals with the exceptions of cephalopods, some social microbes, and some social insects; B2=vertebrates and aforementioned exceptions of B1; H=humans. See main text for further details and explanations.
Table 1.
The Theory of Intelligences is based on functions and associated abilities. Operators, instruments and maximizers are partitioned into hypothesized ability levels associated with system complexity. Each ability could have variants of at multiple levels and the table only lists each with their (hypothetically) most basal level. Abilities included in TIS indices are indicated in italics. System types associated with each feature are given, with uncertain or partial assignments indicated by parentheses. P=natural physical; AI=artificial intelligence; B1=unicellular, multicellular fungi and plants, invertebrate animals with the exceptions of cephalopods, some social microbes, and some social insects; B2=vertebrates and aforementioned exceptions of B1; H=humans. See main text for further details and explanations.
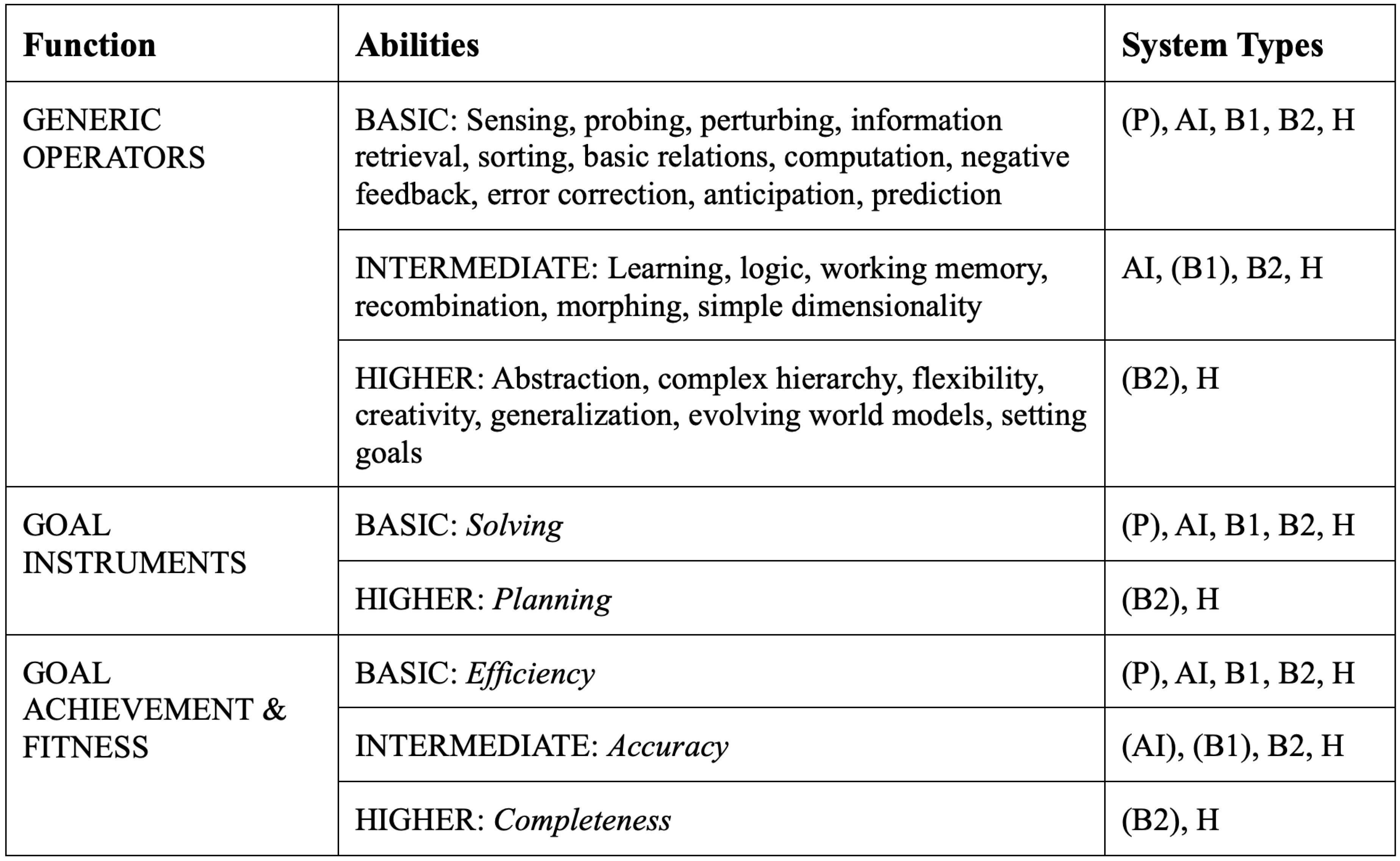
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



