Submitted:
23 December 2023
Posted:
27 December 2023
You are already at the latest version
Abstract
The advancement of technology has led to a shift in the automotive industry from gasoline vehicles to electric vehicles. One of the key factors in modern vehicles is the communication between control devices and commands. This thesis presents a prototype of communication in the form of CAN BUS Protocol with CAN STANDARD SAE.J1939 for All-Terrain Vehicle (ATV) using MRS Developers Studio software to control the CAN Bus system. This thesis discusses the operation of communication from the assembly of the ATV, the packing of a 72 V 25Ah battery as a power source for the vehicle, the layout of the wiring system for receiving/sending communication signals for the 3 CAN Bus control boxes, and programming with MRS Developers Studio software used in communication. The communication of the vehicle in the ATV consists of receiving/sending signals of switches, headlights, left turn signal, right turn signal, brake light, emergency light, horn, forward-reverse gear, and accelerator. The results of the operation of the CAN Bus Protocol found that the CAN Bus control box has only 6 input and output pins, making the communication that has both receiving and sending signals insufficient. Therefore, starting from the CAN Bus1 control box acts as a receiver of signals from the forward-reverse gear switch sent to the output of the CAN Bus3 control box, the CAN Bus1 control box acts as a receiver of all light signals sent to the output of the CAN Bus2 control box. The signal transmission between devices will send signals through the CAN HUB line to ensure stability and minimal interference. In addition, the communication between devices from testing the operation of various switches on and off up to 1000 times found that this communication does not cause errors, making this communication reliable and stable.
Keywords:
CAN bus protocol
; MRS developers studio
; communication in electric vehicles
1. Introduction
The CAN Bus Protocol or Controller Area Network (CAN) is a communication protocol that supports real-time communication under high security. The CAN bus communicates using two wires, referred to as CAN High and CAN Low. When both are in idle state, they have a voltage of 2.5V. However, when data bits need to be transmitted, the voltage of CAN High increases to 3.75V, while CAN Low decreases to 1.25V, resulting in a voltage difference of 2.5V show in Figure 1. This method results in the CAN Bus Protocol being minimally disturbed by magnetic fields or any other interference, making it stable and commonly used for transmitting data to various de-vices. Therefore, it is popularly used in the communication network between Micro Controller Units (MCU).
Figure 1 shows the ISO 11898-2 standard and ISO 11898-3 standard. This thesis uses ISO 11898-2 for this standard specifies the high-speed physical media attachment of the Controller Area Network (CAN), which is a serial communication protocol that supports real-time, distributed and multiplexed control for use in road vehicles. The difference in standards is the speed of data signal transmission.
The main difference between CAN 2.0A and CAN 2.0B is indeed the identifier length. CAN 2.0A, also known as Standard CAN, uses an 11-bit identifier, while CAN 2.0B, or Extended CAN, supports both 11-bit (standard) and 29-bit (extended) identifiers. When both standard and extended frames exist on the same bus and have numerically equivalent identifiers, the standard frame will have the higher priority. This is due to the way CAN bus arbitration works: it’s based on the identifier, and the lower the binary value, the higher the priority. In the case of numerically equivalent identifiers, the standard identifier is seen as having a lower binary value because the extended identifier is effectively ‘padded’ with additional bits. This feature allows for flexibility and complexity in device communication, making CAN bus a robust and versatile protocol for automotive and industrial applications. The standard CAN Bus 2.0B protocol shows the data storage format as shown in Figure 2.
In the modern automotive industry, the CAN Bus system is a network of electronic devices that communicate with each other using a common protocol called Controller Area Network (CAN). This system is widely used in modern cars. The CAN Bus system allows efficient communication between various electronic devices using only two bus lines, CAN-High and CAN-Low, to transmit data between modules in the car. Each module has a unique identifier and can send and receive messages on the network. In addition, the CAN Bus system provides real-time data transmission and uses a priority-based scheduling format to ensure that important messages are sent first, ensuring that all devices can access the same data at the same time. Data is transmit-ted using different electrical voltages between the two lines for receiving and transmitting data. At both ends of the line, a 120Ω resistor (called terminating resistor) is connected to reduce resistance for high drive lines and reduce noise signals. The CAN Bus system also helps reduce the complexity of wiring with fewer wires, making it easier to install and maintain the system. The CAN Bus also reduces the weight of the car and increases space for other equipment.
From the Figure 2. The dominating CAN-based higher-layer protocol for cars, trucks and busses, defined by SAE. J1939 is divided into several parts describing the physical layer, data link layer, network management, and a large number of predefined messages. SAE.J1939 or The Society of Automotive Engineers (SAE) J1939 describes a standard vehicle bus for diagnostics and communications in cars, trucks and other heavy-duty vehicles. J1939 was first released in 1994, while CAN Bus was included in 2000. With data rates up to 250 kbps. The SAE J1939 standard communication is defined in the form of PDU Format for communication in electric vehicles. The format for receiving and sending data is shown in Figure 3.
All J1939 standards have 8 bytes of data and a standard header which has an index called Parameter Group Number (PGN) embedded in the 29 bits identifier of the message. The PGN specifies the function of the message and the associated data. J1939 attempts to define standard PGNs to cover objectives in automotive, agriculture, marine, and diverse road applications. The range of PGNs (00FF00 to 00FFFF) is reserved for proprietary use. The PGN defines data composed of a number of variables of the component Suspect Parameter Number (SPN) specified for non-repetitive data.
This thesis consists of 5 sections: Section 1 discusses the standards and importance of data transmission in the CAN Bus system. Section 2 talks about the creation of a CAN Bus 2.0B communication system in All-Terrain Vehicle (ATV) using the SAE.J1939 standard, which includes signals for turn signals, emergency lights, headlights, and a forward-backward gear control unit. Section 3 is the research methodology for the thesis, starting with the use of the SAE.J1939 standard in conjunction with the MRS Developer Studio software for controlling the ATV to operate as desired. Section 4 presents the results obtained from using the SAE.J1939 standard in conjunction with the software. After uploading the program into the CAN Bus Controller, performance tests are conducted to serve as a prototype for communication in electric vehicles (EV). This leads to the conclusion of the experiment in Section 5.
2. Elements and Communication in ATV
This section discusses the components related to the communication of ATV vehicles, the packaging of batteries for load distribution, the use of CAN Bus Controller equipment, communication between more than 2 CAN Bus Controllers, and the basics of using MRS Developer Studio software.
2.1. The Overview of Communication in the SAE.J1939 Standard in Conjunction with ATV Vehicles
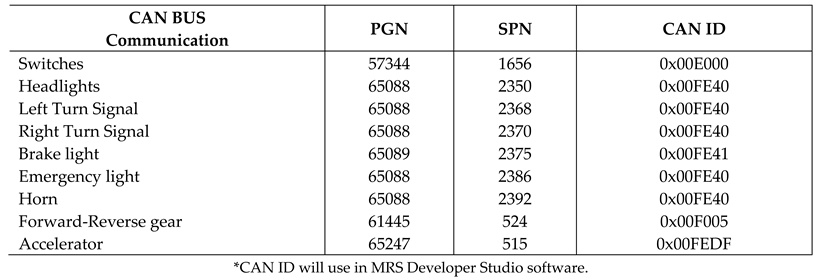
The advancement of technology today has led to various forms of communication in electric vehicles, one of which is the CAN Bus protocol. This thesis focuses on the communication of an electric ATV vehicle using the SAE.J1939 standard, with the MRS Developer Studio software serving as a medium for writing and uploading programs into the CAN Bus Controller. The overview of communication in conjunction with the software is shown in Figure 4. Due to the limitation of only 6 pins of Analog and digital inputs and outputs of the control box, it is not possible to use a single control box. Therefore, additional control boxes are necessary. In addition, the writing of various standards will be shown in Table 1 in the form of PGN Group (PGN Group is the PDU Format in the path of controlling and commanding various systems in electric vehicles). For the ATV vehicle that studies the reception and transmission of data, includes Switches, Headlights, Left Turn Signal, Right Turn Signal, Brake light, Emergency light, Horn, Forward-Reverse gear and Accelerator only. Because some types of communication are copyrighted and permission must be obtained before use. Therefore, this ATV vehicle is one prototype of communication in electric vehicles.
The usage table of the SAE.J1939 standard, the use of PGN, SPN, CAN ID data will be shown in Appendix.
2.2. The General Structure of ATV Electric Vehicle
- ATV Electric Vehicle
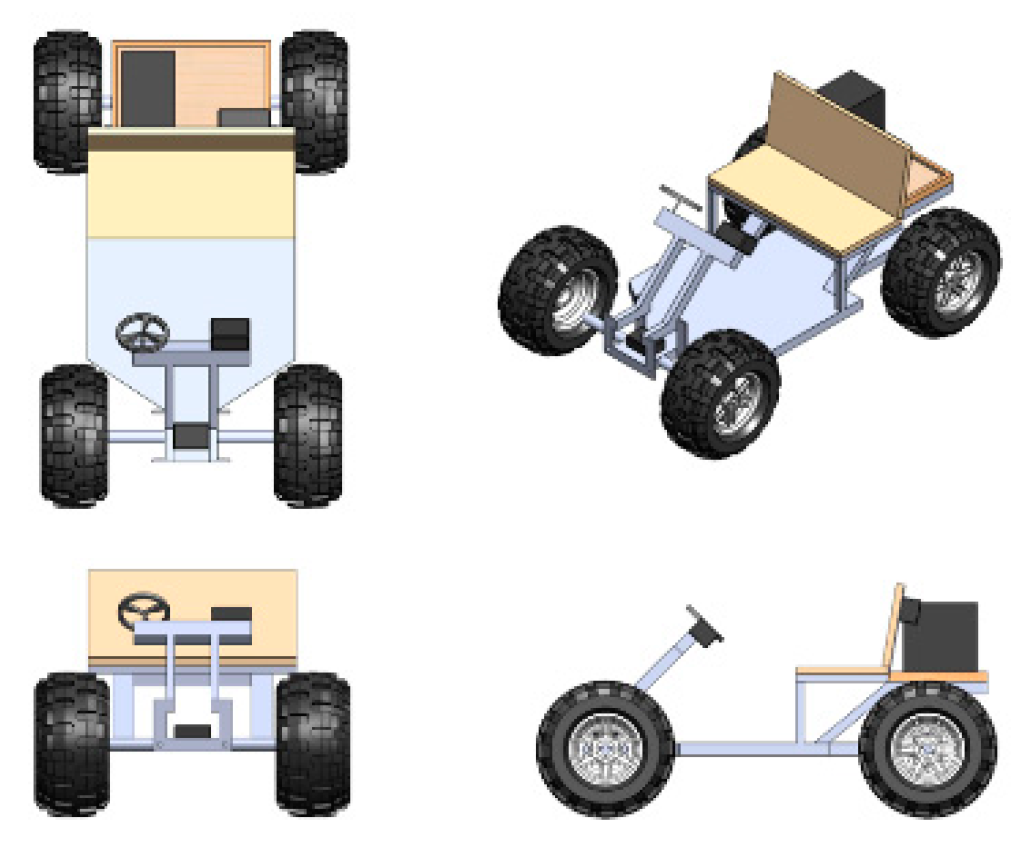
This thesis discusses the design of a standard SAE.J1939 communication system in a small electric ATV vehicle. The structure of the electric ATV vehicle is assembled using Solid Work software for modeling. The materials and equipment used in the assembly are shown in Table 2.
Figure 5.
General structure of the Electric vehicle.
- Battery Packs
In the communication of electric ATV vehicles, it is necessary to have a power source for propulsion. The ATV uses a 60V motor for propulsion, so the energy suitable for powering the system should be greater than the electrical power of the motor. This thesis chooses to use a 72V25Ah battery as shown in Figure 6. The process of packing a battery to have a voltage of 72 V 25 Ah starts with using a lithium-ion (NMC) battery that has a voltage of 3.7 V 25 Ah. From the calculation, NMC needs 20 cells (follow in equation 1) connected in series to achieve approximately 72 V. Before packing, each cell should be balanced to have the same voltage. Then, pack them in a container to prevent cell dispersion and short circuits. Once the battery pack is ready, connect a BMS to each cell to maintain the voltage level and prevent cell damage.
Battery Pack Shown in equation 1
When n is Number of battery cells
- V72V is Battery Packing
- V3.7V is Li-Ion (NMC) 1 Cell
- Energy control system in electric vehicles
Given that the battery pack has a voltage of 72 V, it cannot supply power to the load of devices such as light bulbs, electric accelerators, and power supply boards for controllers, etc. Therefore, a device is needed to reduce the voltage to a suitable level that does not exceed 12 V for operation. Following in Figure 7.
The control unit of an electric vehicle consists of 4 parts: 1. Vehicle Control Unit (VCU), which controls the operation of the electric vehicle, similar to the ECU in an internal combustion engine vehicle, 2. Motor Control Unit (MCU), which controls the operation of the motor as commanded by the VCU, including the Inverter, 3. DC/DC Converter, which converts direct current voltage for driving the motor, charging the battery, and supplying the 12 V electrical system in the vehicle, 4. Battery Management System (BMS), which monitors and controls battery charging, discharging, temperature checking, charging status, and high-voltage battery energy usage. It also transmits important data to other systems and most importantly adjusts the electrical system of the battery to function as specified.
- CAN Bus Controller
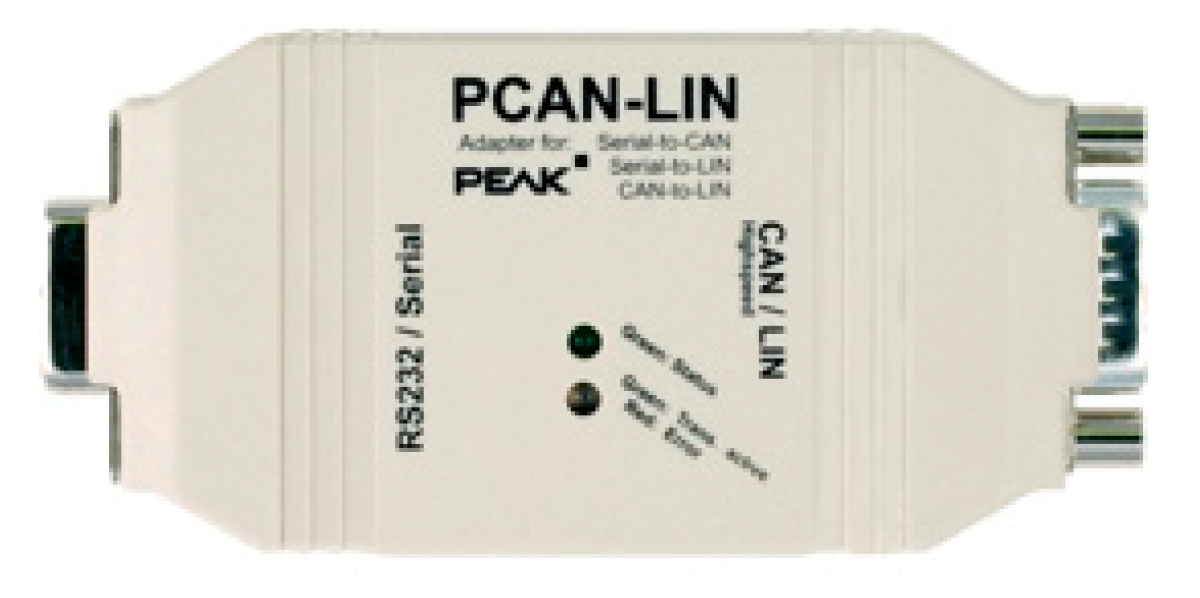
The device used for communication is the CAN I/O model PLC 1.033.30B.00 from MRS (MRS Developers Studio). It can receive and send data through software programming. The signal is transmitted via a high-speed or low-speed connection, depending on the usage. This control system requires a 24 V power supply to operate.
From the Figure 4. This thesis will use 3 CAN Bus Controllers due to the limitation of inputs and outputs, which have only 6 pins of Analog and 8 pins of Digital shown in Figure 8. This results in a need for communication to be categorized. Specifically, the CAN Bus Control Box 1 is responsible for receiving signals composed of headlights, front turn signals, horn sounds, and electric throttle to process and send to the CAN Bus Control Box 2. At the same time, the CAN Bus Control Box 2 will receive signals composed of taillights to process and send to the CAN Bus Control Box 3. The circuit connection is shown in Figure 9.
- CAN Hub transmission line
CAN Hub is a central device that connects more than two CAN Bus control boxes together. In the CAN network system, the CAN Hub is a device used to connect the signals of network devices together. For controllers to recognize each other or to send data to each other, they must go through this device. Currently, the CAN Hub is compared to a Switch but has higher capabilities and is considered a standard device for connecting signals in a network system. Whenever a computer within the network wants to send data, the hub will copy the data and send it to various devices within the network. This is not just for computers, but also for other devices, meaning it sends data to all. And if this data belongs to any device, that device will automatically receive it. A downside of the hub that should be noted is that when any device sends data in the network via the hub, other devices must wait for the transmission to complete. This can be compared to a One-Way road where data cannot be sent in opposite directions.
Figure 10.
Can Hub transmission line.
3. Research and Communication with MRS
The procedure begins with communication between the device and the software in the CAN Bus test board in Figure 8 before it is installed on the ATV. The test involves communication of Switches, Headlights, Left Turn Signal, Right Turn Signal, Brake light, Emergency light, Horn, Forward-Reverse gear, Accelerator. In addition to communication, wiring and electric vehicle frame formation are also crucial for the results.
- MRS Developers Studio
The communication system of electric vehicles for the CAN I/O control device starts with opening the MRS Developers Studio software and creating a new project, following in Figure 11. Should input the address according to the CAN I/O box, which is modelled PLC 1.033.30B.00, select Revision as type E, and name the project as desired. If the information does not match with the CAN I/O box, it will prevent the electric vehicle from communicating.
When opening a project, set the numbers in the order shown in Figure 12, starting from number 1. Use it to update when writing logic in the software, number 2 is used to save the work file, numbers 3-4 are used to set up data transmission between the CAN Bus test box, number 5 is used to determine the response speed for data transmission, number 6 is used to write the control of the electric vehicle operation, number 7 shows the usage of Analog and Digital pins for write the control system, and numbers 8-9 are used to open control in programming.
In the window Graphical programming click on button “EDIT CAN_DB” (Number 3 from Figure. 9) to show the definitions of CAN block and CAN data points, EDIT CAN_DB is shown in Figure 13.
CAN-block is a CAN frame which is defined by a 11 or 29 (extended) identifier, by a name and by a data content from 0 to 8 bytes. CAN-data point is a variable inside a CAN-block, which is defined by a number of bits within the 8 Bytes array. It is possible to have multiple CAN-data points within the same CAN-block as long as it has bits to be attributed.
From Figure 13, that is indicated that variables need to be set for the transmission of data between devices. The method for setting various parameters is shown in Table 3, CAN-block definition and Table 4. CAN-data definition.
From Figure 12. “Graphical programming” by clicking "Edit more DBs" a new window is opened to specify the settings of all I/O of the module. You can set the digital I/O, analog inputs, PWM outputs and the lists for EEPROM index and user variable index shown in Figure 14. (*use A&D variables in the control design as defined by the program only).
When you have set the variables as needed, for this thesis, we will write a diagram related to controlling the switches, headlights, left turn signal, right turn signal, brake light, emergency light, horn, forward-reverse gear, and accelerator. The entire system is shown in Figure 15, Figure 16 and Figure 17.
- The Construction of Mechanical Structures
After initial software testing, the next step is to shape the mechanical structure of the electric vehicle. This article will assemble the CAN I/O test suite of all three devices onto the electric vehicle and upload various operational diagrams to complete it. The simple structure of an electric vehicle is shown in Figure 18.
4. Results
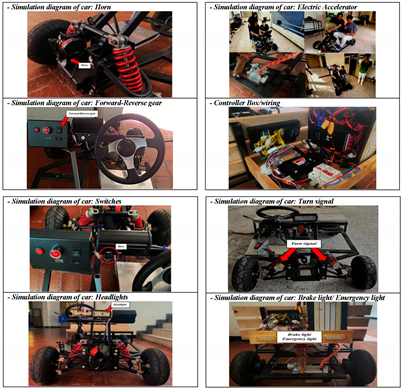
The results from the CAN Bus communication with the SAE.J1939 standard in the ATV electric vehicles were put into the CAN Bus Test Box, which includes switches, headlights, left turn signal, right turn signal, brake light, emergency light, horn, forward- reverse gear and accelerator. CAN Bus Test Box found that the communication was responsive and stable. This is because the researchers used high-speed communication with a resistance value of 120Ω in parallel with the CANH-CANL signal line as shown in Figure 19. In addition, when it was found that the communication results were satisfactory, they were uploaded to the electric ATV. The components of various structures are shown in Figure 19. It was tested for performance and lifespan in operation by testing the opening and closing of the said equipment up to 1000 times as shown in the test results Table 5. This is to be a prototype of one communication standard for EV in the future. In addition to the results of the tests on the CAN Bus Test Box, the researchers also uploaded the communication to the ATV electric vehicle as shown in Table 6.

 |
Cost of electricity per battery charge
-The electrical energy of the battery can be found from equation (2)
-The unit of electrical energy usage can be found from equation (3)
-Calculating the cost of electricity in Thailand can be found from equation (4)
From the above equation, calculating the cost for charging a 72 V 25 Ah battery, substituting the given parameters, find that the energy used to charge the battery 100% is 1800 Wh, equivalent to 1.8 units. Therefore, the cost of electricity for charging is 7.182 baht per charge.
From Figure 6, evident that the battery pack, which includes a JIKONG BMS model, allows the user to check the voltage, resistance values of each cell, and the battery pack's charging current through an application. In addition to this, it also enables the user to monitor the temperature status. The different statuses are displayed as shown in Figure 20.
5. Conclusion
The results from the communication of the thesis "CAN Protocol Communication System with MRS Developers Studio in ATV Electric Vehicles" using the SAE.J1939 standard found that the communication testing of switches, headlights, left turn signal, right turn signal, brake light, emergency light, horn, forward-reverse gear, and accelerator can receive and send signals through the CAN Bus Controller in real-time. Therefore, the SAE.J1939 standard is suitable and is one of the standards for electric vehicles that the examiner can modify the MRS Developer Studio program command set when there is a communication error between devices. This is because the SAE.J1939 standard has defined the format of the protocol. The researcher must choose to use according to the standard set. In addition, the communication between devices from testing the operation of various switches on and off up to 1000 times found that this communication does not cause errors, making this communication reliable and stable. However, the disadvantage of this standard is that it requires permission to use the standard because the use of this communication is copyrighted. However, if anyone wants to study this communication standard, they can contact the researcher or the university to use it as a guideline for one form of communication in the future.
Acknowledgments
The simulation thesis for CAN Protocol Communication System with MRS Developers would like to thank the Suranaree University of Technology, Faculty of Engineering for their assistance in terms of budget and equipment for the thesis, as well as advice and close monitoring of thesis.
Appendix A
Parameter Group Number (PGN)
Figure A1.
Example of SAE.J1939 PGN 65098 Electroic Transmission Controller 7 standard.
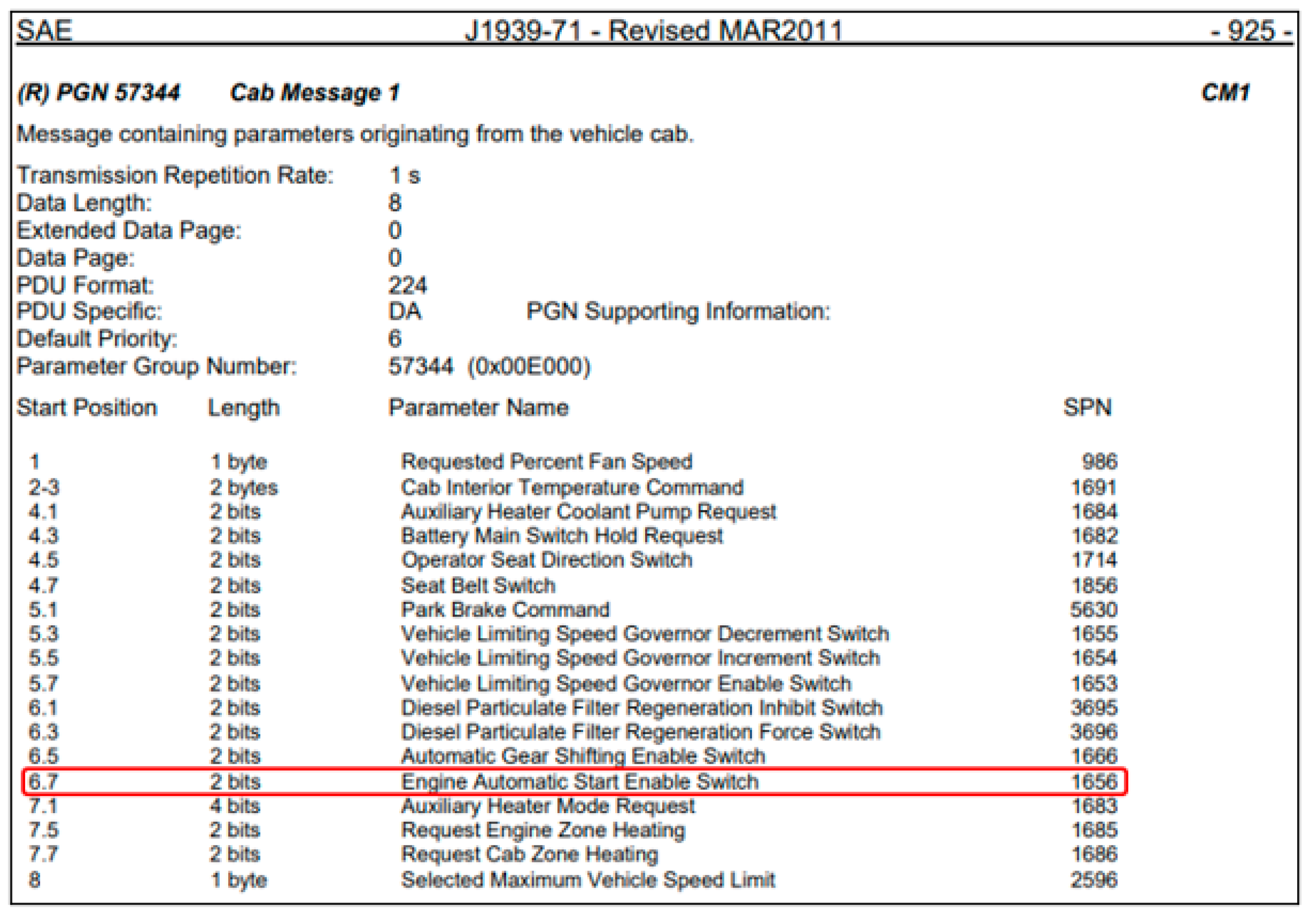
Figure A2.
Example of SAE.J1939 PGN 65088 Lighting Data standard.
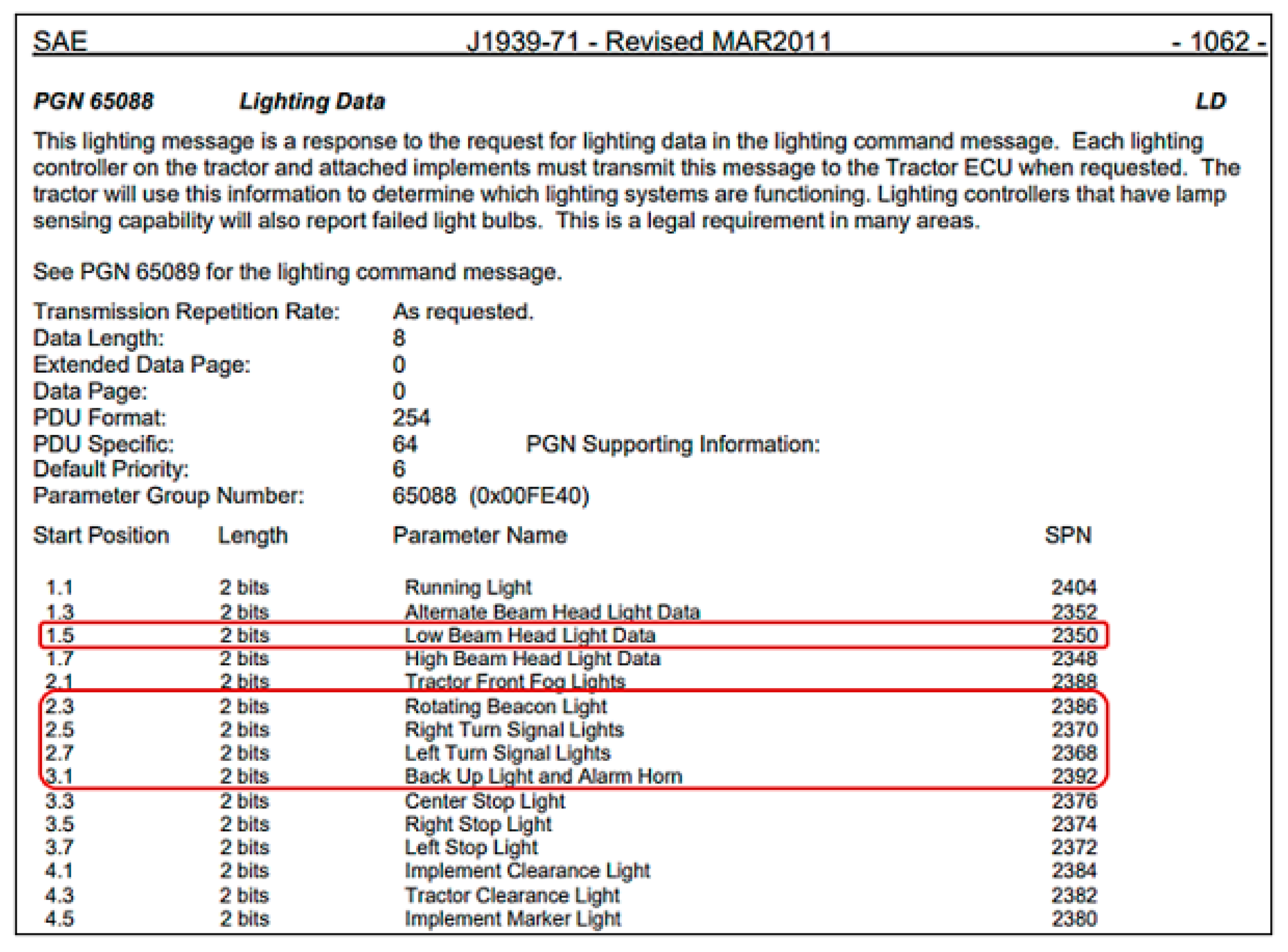
Figure A3.
Example of SAE.J1939 PGN 61445 Electronic Transmission Controller 2 standard.
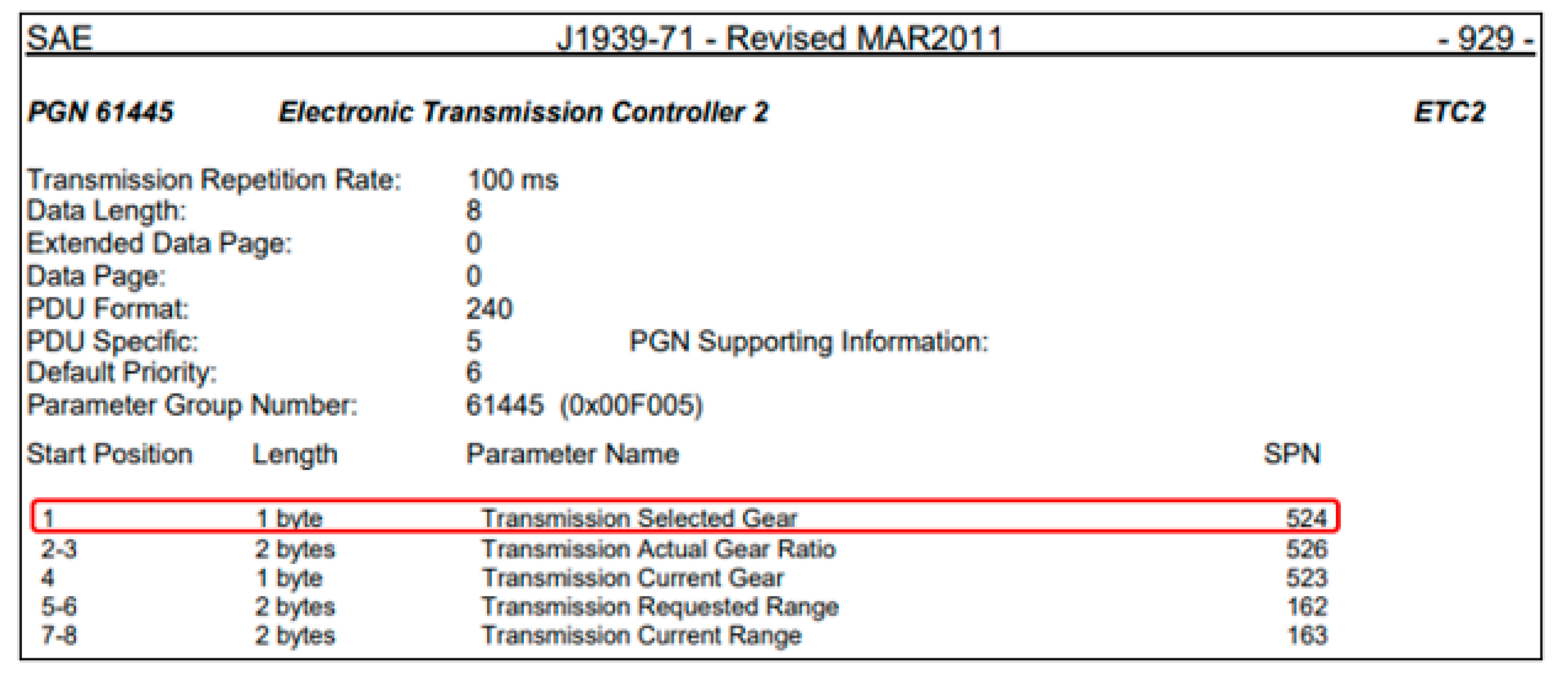
Figure A4.
Example of SAE.J1939 PGN 61445 Electronic Transmission Controller 2 standard.
Appendix B
SPN Data Communication and Control
Figure A5.
Engine Automatic Start Enable Switch.
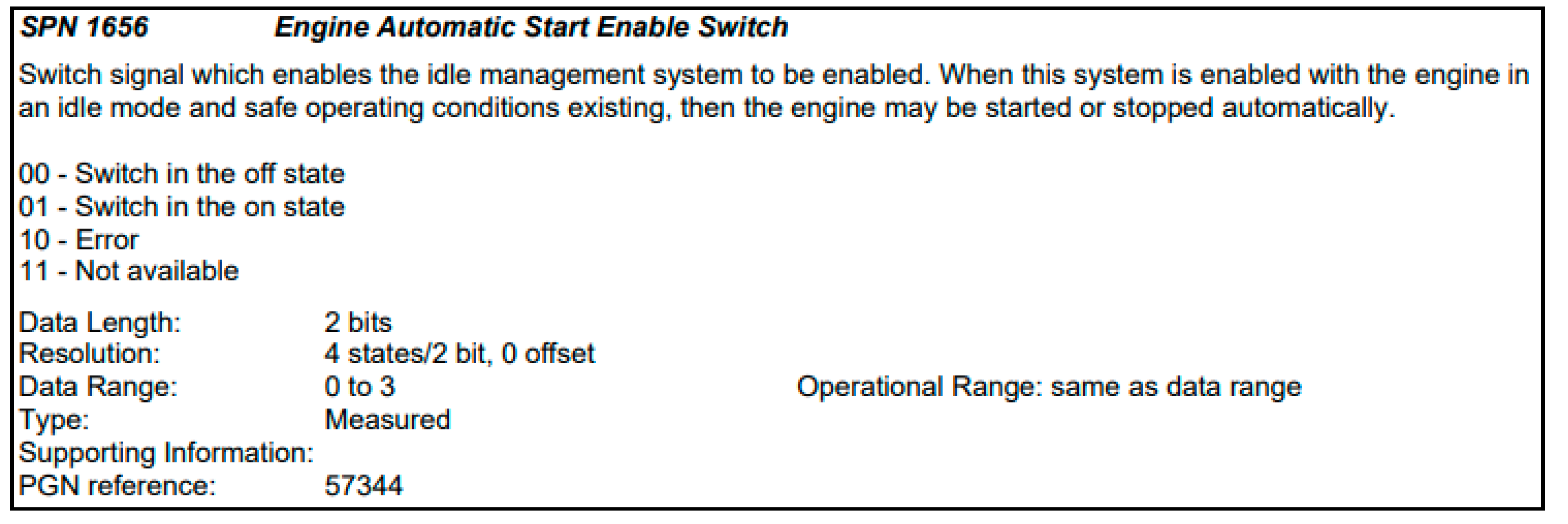
Figure A6.
Low Beam Head Light Data.
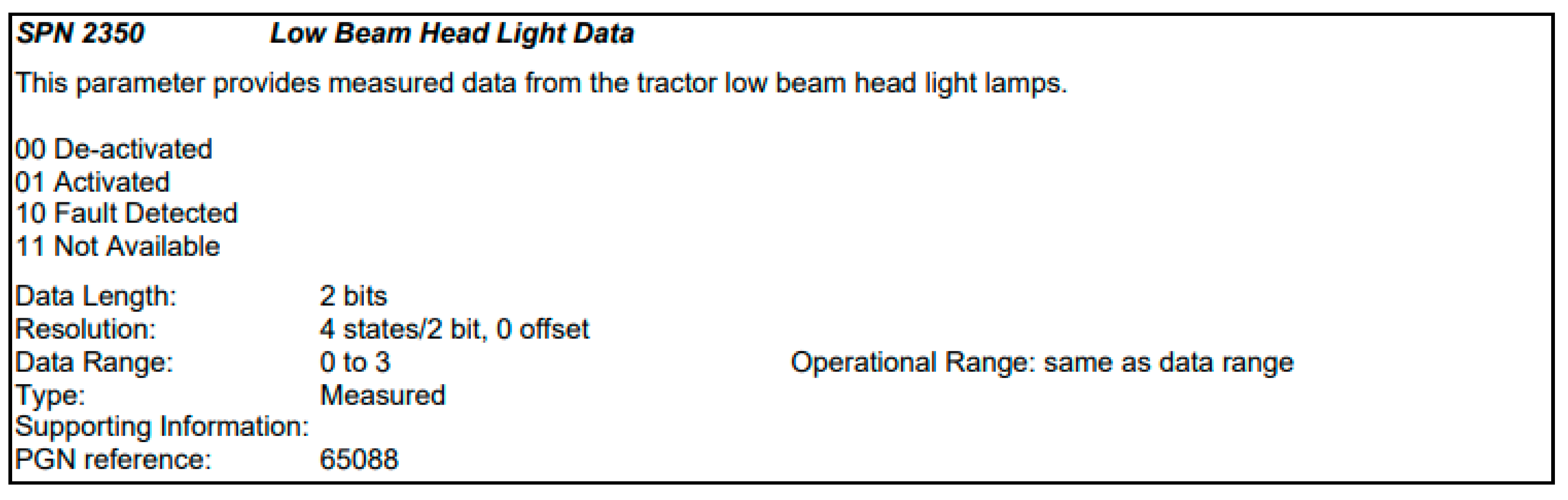
Figure A7.
Left Turn Signal Lights.
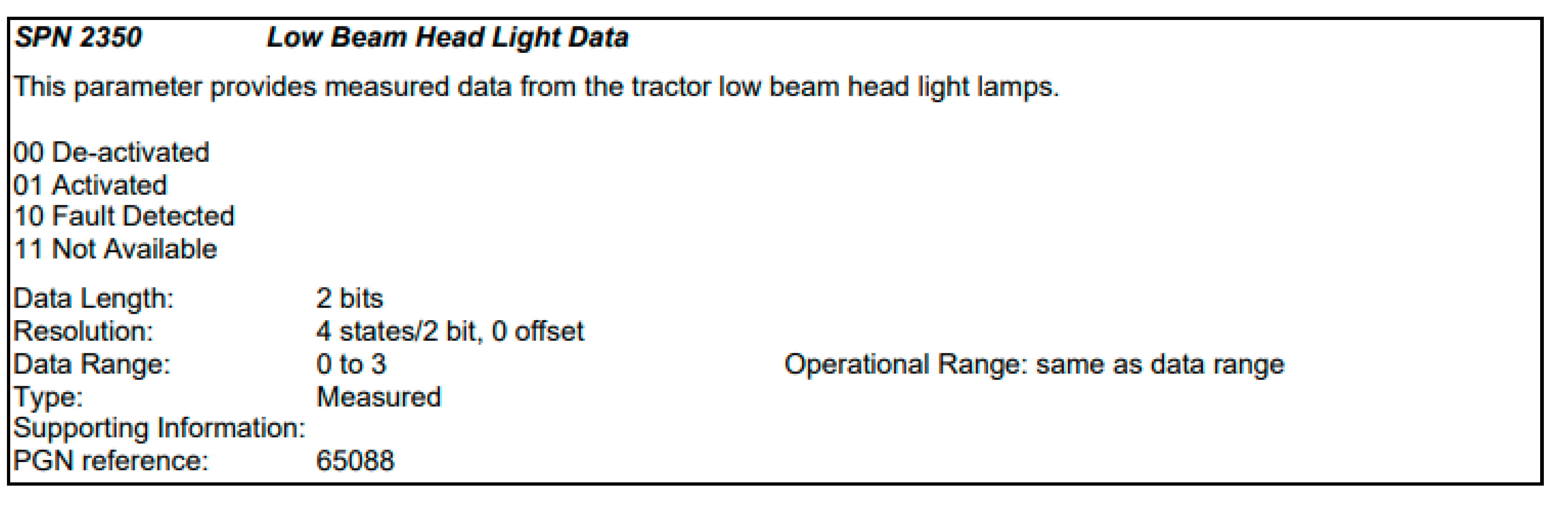
Figure A8.
Right Turn Signal Lights.
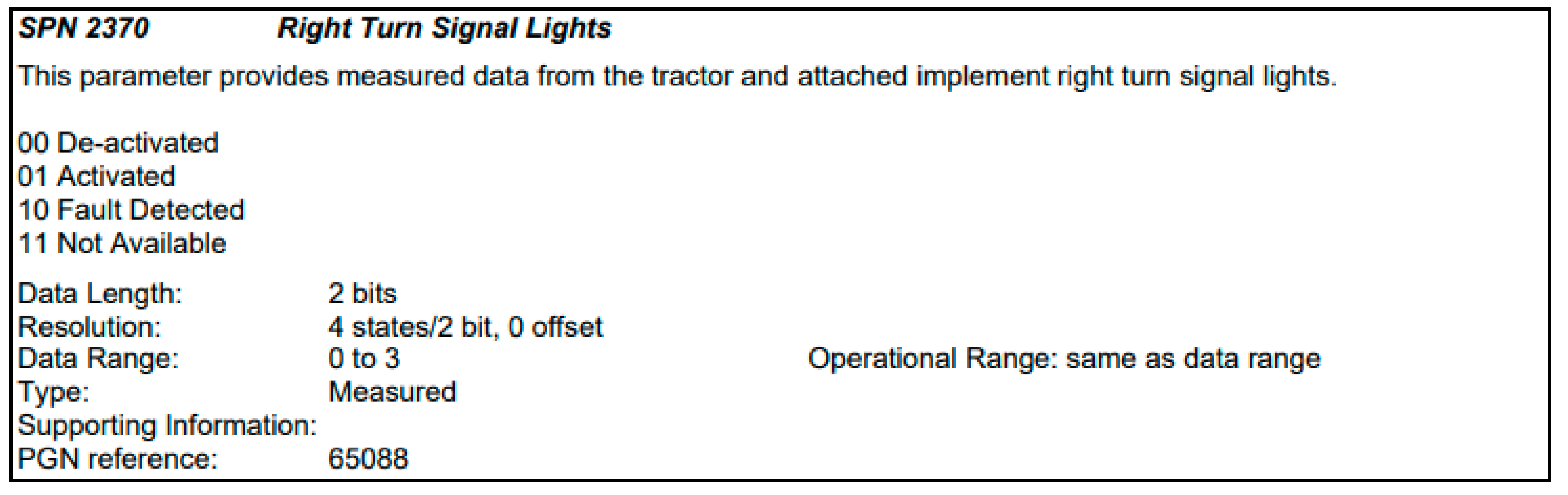
Figure A9.
Center Stop Light Command.
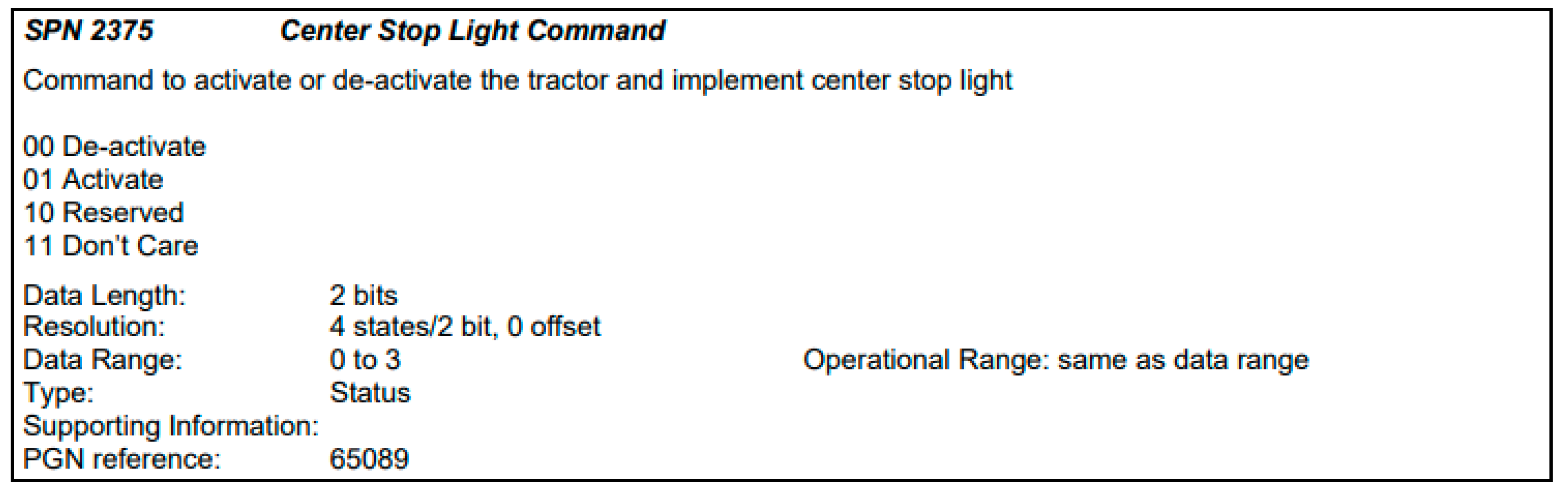
Figure A10.
Rotating Beacon Light.
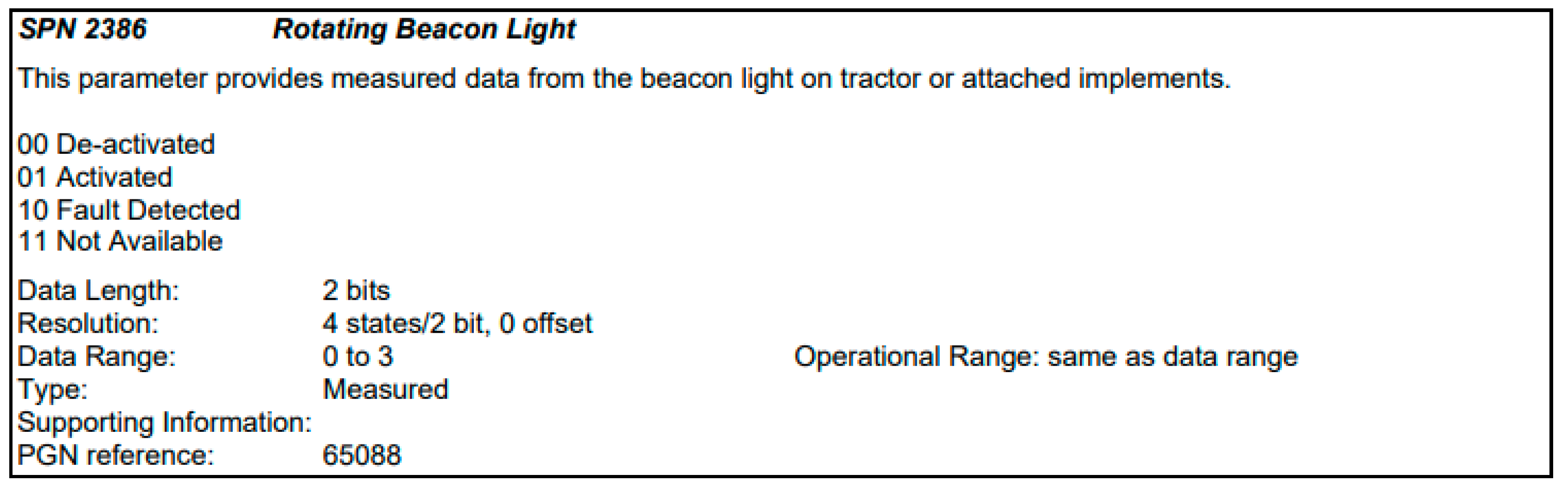
Figure A11.
Back Up Light and Alarm Horn.
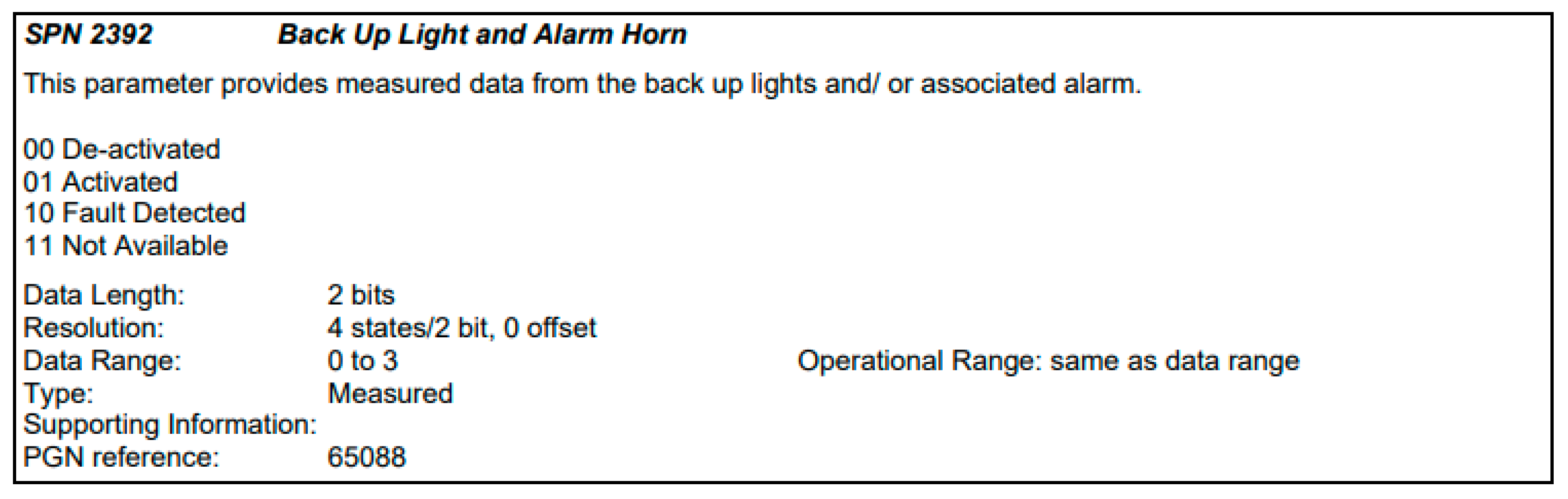
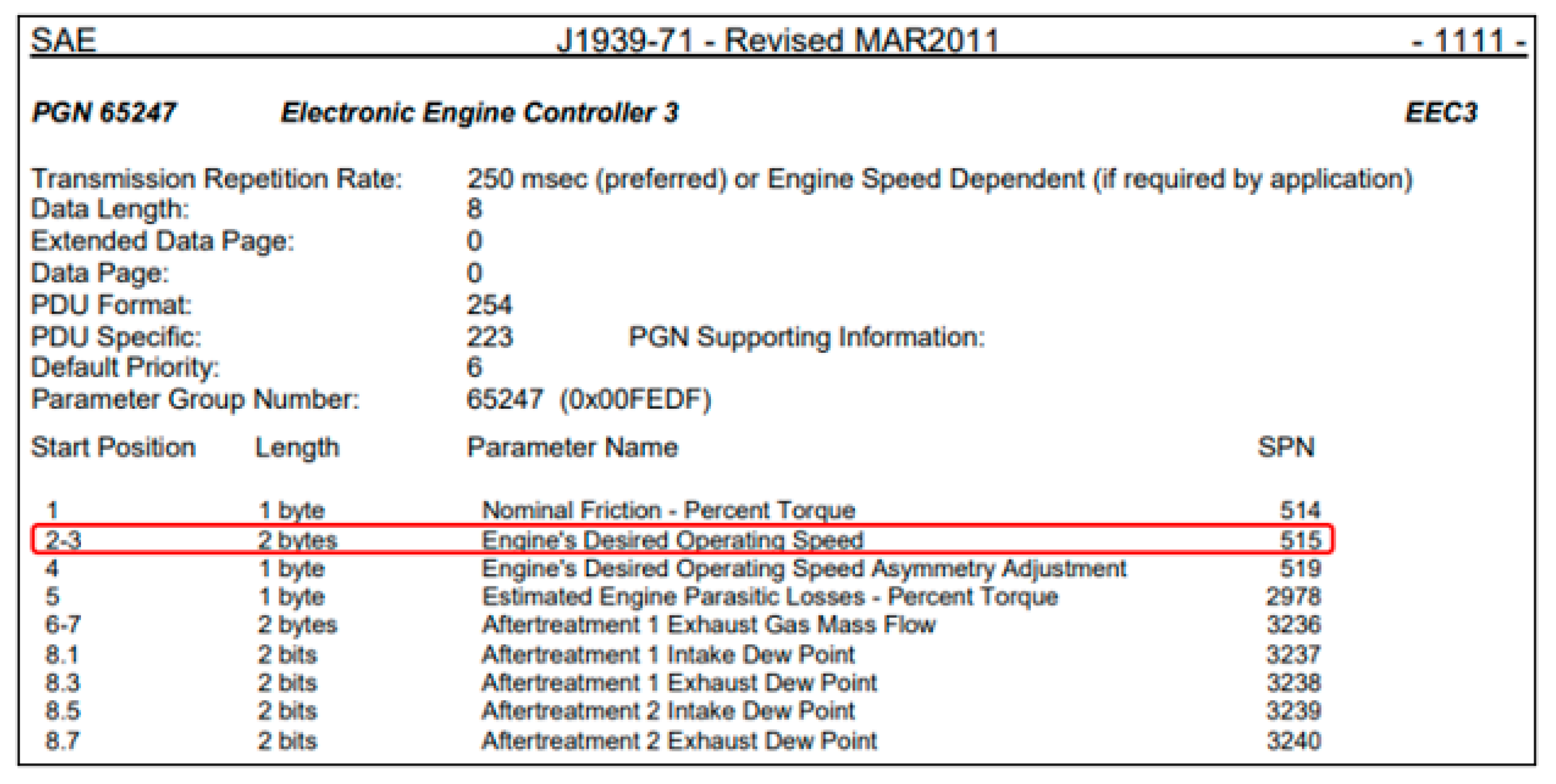
Figure A12.
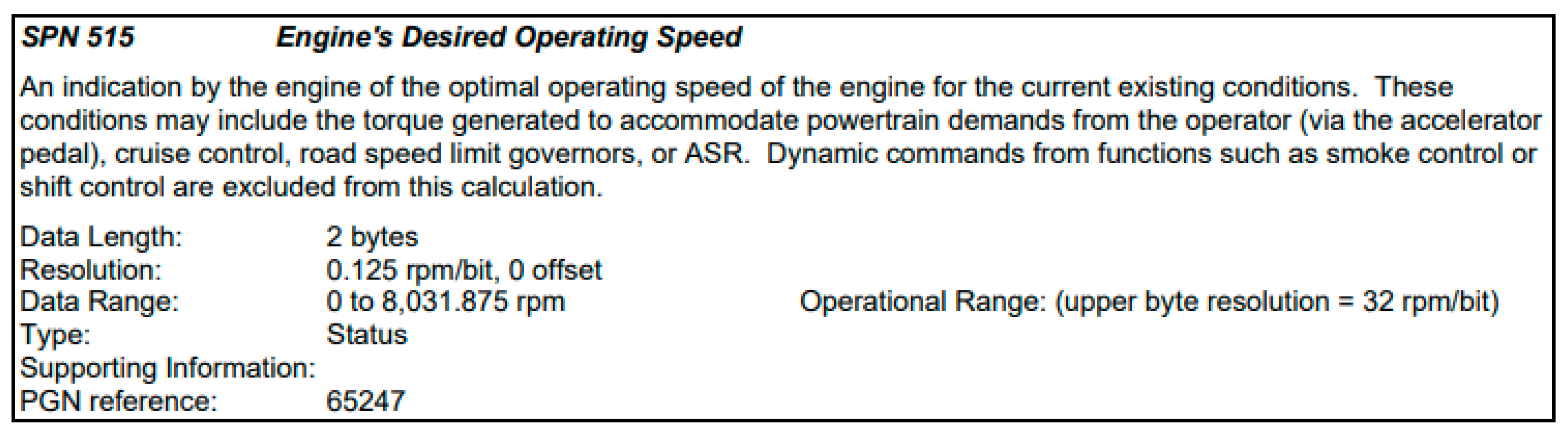
Engine’s Desired Operating Speed.
References
- Y. Yuan, "Research on Electric Vehicle Driverless Test System Based on Computer Big Data Technology," 2023 IEEE 2nd In-ternational Conference on Electrical Engineering, Big Data and Algorithms (EEBDA), Changchun, China, 2023, pp. 1018-1022.
- M. MARINOV, J. PETROV, O. STANCHEV and P. ANDREEV, "Studying the Performance Characteristics of the Electric Vehicle," 2019 16th Conference on Electrical Machines, Drives and Power Systems (ELMA), Varna, Bulgaria, 2019, pp. 1-5.
- B. Zhu et al., "The Design of Automatic Testing Platform on Electric Vehicle Off-Board Charger Interoperability," 2018 5th International Conference on Information Science and Control Engineering (ICISCE), Zhengzhou, China, 2018, pp. 1276-1279.
- P. Pedret, G. Bayona, J. Webb, C. Moure and S. Boltshauser, "Control systems for high performance electric cars," 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 2013, pp. 1-7.
- Z. Wang and D. Yin, "Design and Implementation of Vehicle Control System for Pure Electric Vehicle Based on AUTOSAR Standard," 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 2019, pp. 1-5.
- J. Valera, L. Huaman, L. Pasapera, E. Prada, L. Soto and L. Agapito, "Design of an autonomous electric single-seat vehicle based on environment recognition algorithms," 2019 IEEE Sciences and Humanities International Research Conference (SHIRCON), Lima, Peru, 2019, pp. 1-4.
- S. Ledinger, D. Reihs, D. Stahleder and F. Lehfuss, "Test Device for Electric Vehicle Grid Integration," 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC / I&CPS Europe), Palermo, Italy, 2018, pp. 1-5.
- V. Totev and V. Gueorgiev, "Batteries of Electric Vehicles," 2021 13th Electrical Engineering Faculty Conference (BulEF), Varna, Bulgaria, 2021, pp. 1-6.
- R. Hou, L. Zhai, T. Sun, Y. Hou and G. Hu, "Steering Stability Control of a Four In-Wheel Motor Drive Electric Vehicle on a Road with Varying Adhesion Coefficient," in IEEE Access, vol. 7, pp. 32617-32627.
- W. Cao, Z. Zhu, J. Nan, Q. Yang, G. Gu and H. He, "An Improved Motion Control with Cyber-Physical Uncertainty Tolerance for Distributed Drive Electric Vehicle," in IEEE Access, vol. 10, pp. 770-778. [CrossRef]
- E. Siriboonpanit, K. Sasiwimonrit, J. Saelao and N. Patcharaprakiti, "An Air Force Cooling of Lithium–ion Battery Thermal Management System for Heat Eliminating in Modified Electric Vehicle," 2022 International Electrical Engineering Congress (iEECON), Khon Kaen, Thailand, 2022, pp. 1-4.
- J. Ouyang, D. Xiang and J. Li, "State-of-function evaluation for lithium-ion power battery pack based on fuzzy logic control algorithm," 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chong-qing, China, 2020, pp. 822-826.
- Wang Dafang, Nan Jinrui and Sun Fengchun, "The application of CAN communication in distributed control system of electric city bus," 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 2008, pp. 1-4.
- Li Ran, Wu Junfeng, Wang Haiying and Li Gechen, "Design method of CAN BUS network communication structure for electric vehicle," International Forum on Strategic Technology 2010, Ulsan, Korea (South), 2010, pp. 326-329.
- Jinrui Nan, Li Zai, Zhifu Wang and Jun Wang, "Bus Communication and Control Protocol Using the Electric Passenger Car Control System," 2006 6th World Congress on Intelligent Control and Automation, Dalian, 2006, pp. 8288-8291.
- Z. Wei, B. Li, R. Zhang and X. Cheng, "Contract-Based Charging Protocol for Electric Vehicles With Vehicular Fog Computing: An Integrated Charging and Computing Perspective," in IEEE Internet of Things Journal, vol. 10, no. 9, pp. 7667-7680, 1 May1, 2023. [CrossRef]
- H. Liu, X. Liang, L. Fang, B. Zhang and J. -W. Zhao, "A Secure and Efficient Authentication Protocol Based on Identity Based Aggregate Signature for Electric Vehicle," 2014 International Conference on Wireless Communication and Sensor Network, Wuhan, China, 2014, pp. 353-357.
- A. Wicaksono and A. S. Prihatmanto, "Optimal control system design for electric vehicle," 2015 4th International Conference on Interactive Digital Media (ICIDM), Bandung, Indonesia, 2015, pp. 1-6.
- J. Ni, J. J. Ni, J. Hu and C. Xiang, "Control-Configured-Vehicle Design and Implementation on an X-by-Wire Electric Vehicle," in IEEE Transactions on Vehicular Technology, vol. 67, no. 5, pp. 3755-3766, May 2018. [CrossRef]
- L. Krčmář, J. Břoušek and T. Petr, "Design of Rear Wheel Steering System of an Experimental Electric Vehicle," 2019 Interna-tional Conference on Electrical Drives & Power Electronics (EDPE), The High Tatras, Slovakia, 2019, pp. 207-210.
- M. Evzelman, M. M. Ur Rehman, K. Hathaway, R. Zane, D. Costinett and D. Maksimovic, "Active Balancing System for Electric Vehicles with Incorporated Low-Voltage Bus," in IEEE Transactions on Power Electronics, vol. 31, no. 11, pp. 7887-7895. [CrossRef]
- X. Zeng, H. Jing, B. Kuang, F. Chen, W. An and S. Zhao, "Speed Control of Four-Wheel Independently Actuated Vehicle based on MPC Algorithm," 2019 3rd Conference on Vehicle Control and Intelligence (CVCI), Hefei, China, 2019, pp. 1-6.
- C. Tang, M. C. Tang, M. Ataei and A. Khajepour, "A Reconfigurable Integrated Control for Narrow Tilting Vehicles," in IEEE Transactions on Vehicular Technology, vol. 68, no. 1, pp. 234-244. [CrossRef]
- H. Xiong, Z. Tan, R. Zhang and S. He, "A New Dual Axle Drive Optimization Control Strategy for Electric Vehicles Using Vehicle-to-Infrastructure Communications," in IEEE Transactions on Industrial Informatics, vol. 16, no. 4, pp. 2574-2582, April 2020. [CrossRef]
- H. Kobayashi, M. Kohriyama, M. Nagata and S. Ohashi, "Study of Deceleration Control using the Power Regenerative Brake to Improve the Ride Comfort in the Electric Vehicle," 2020 23rd International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 2020, pp. 2046-2049.
- L. Suo and J. Sun, "Design and development of ternary logic sinusoidal pulse width modulated rectifier for electric vehicle charging-discharging device," 2019 IEEE 2nd International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 2019, pp. 418-423.
- A.-M. Căilean and M. Dimian, "Current Challenges for Visible Light Communications Usage in Vehicle Applications: A Survey," in IEEE Communications Surveys & Tutorials, vol. 19, no. 4, pp. 2681-2703, Fourthquarter 2017.
- W. Wang, Z. Han, M. Alazab, T. R. Gadekallu, X. Zhou and C. Su, "Ultra Super-Fast Authentication Protocol for Electric Vehicle Charging Using Extended Chaotic Maps," in IEEE Transactions on Industry Applications, vol. 58, no. 5, pp. 5616-5623, Sept.-Oct. 2022. [CrossRef]
- Z. Garofalaki, D. Kosmanos, S. Moschoyiannis, D. Kallergis and C. Douligeris, "Electric Vehicle Charging: A Survey on the Security Issues and Challenges of the Open Charge Point Protocol (OCPP)," in IEEE Communications Surveys & Tutorials, vol. 24, no. 3, pp. 1504-1533, thirdquarter 2022. [CrossRef]
- Song Xuehua, Lu Min, Wu Hesheng, Wang Hong and Liu Fei, "The solution of hybrid electric vehicle information system by modbus protocol," 2011 International Conference on Electric Information and Control Engineering, Wuhan, 2011, pp. 891-894.
Figure 1.
Low-speed signal transmission ISO 11898-3 standard High-speed signal transmission ISO 11898-2 standard (1 is recessive and 0 is dominant).
Figure 1.
Low-speed signal transmission ISO 11898-3 standard High-speed signal transmission ISO 11898-2 standard (1 is recessive and 0 is dominant).
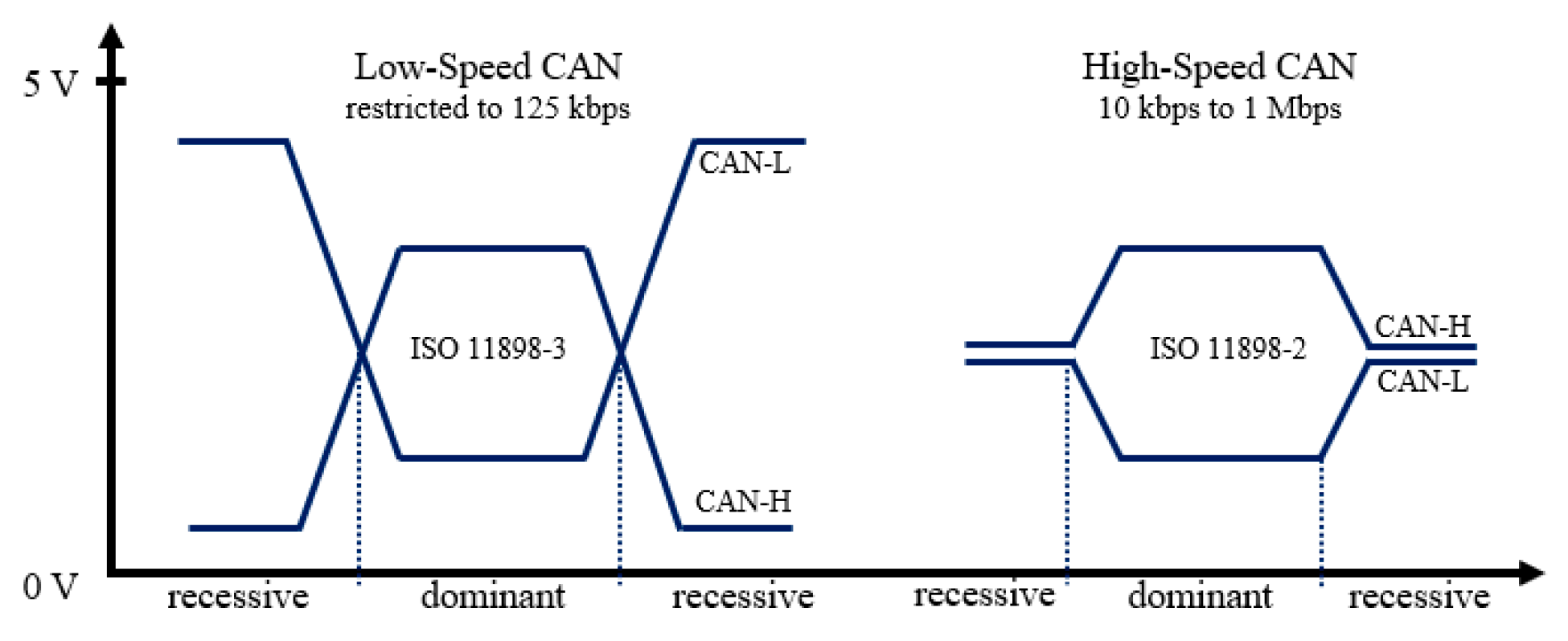
Figure 2.
The standard CAN Bus 2.0B protocol.
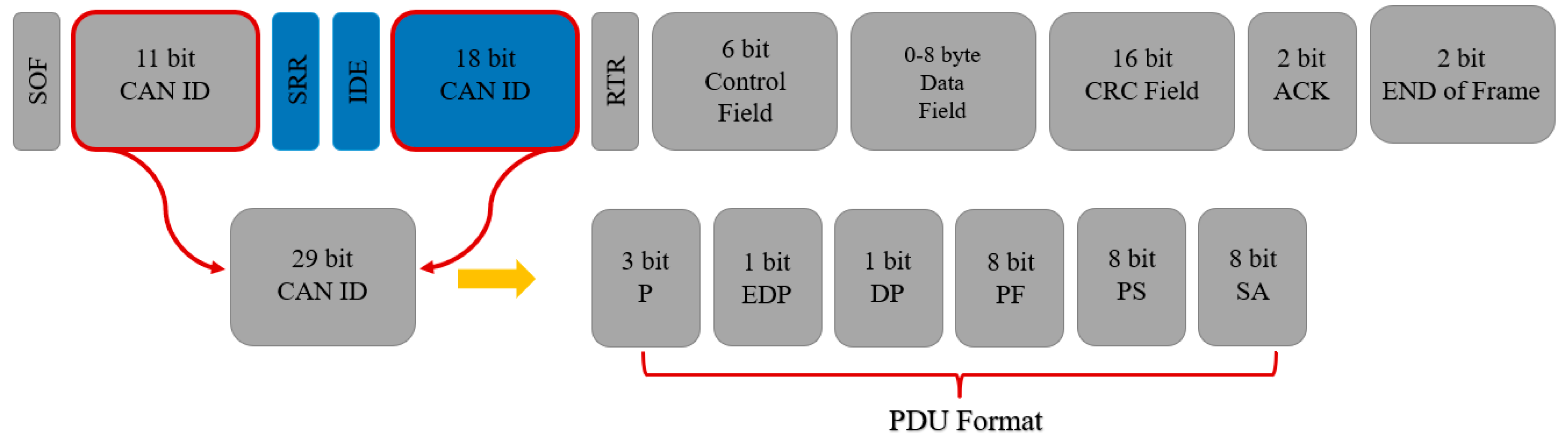
Figure 3.
The SAE.J1939 standard communication is defined in the form of PDU Format.

Figure 4.
Overview of Communication software and hardware.

Figure 6.
Battery pack and balance with BMS.
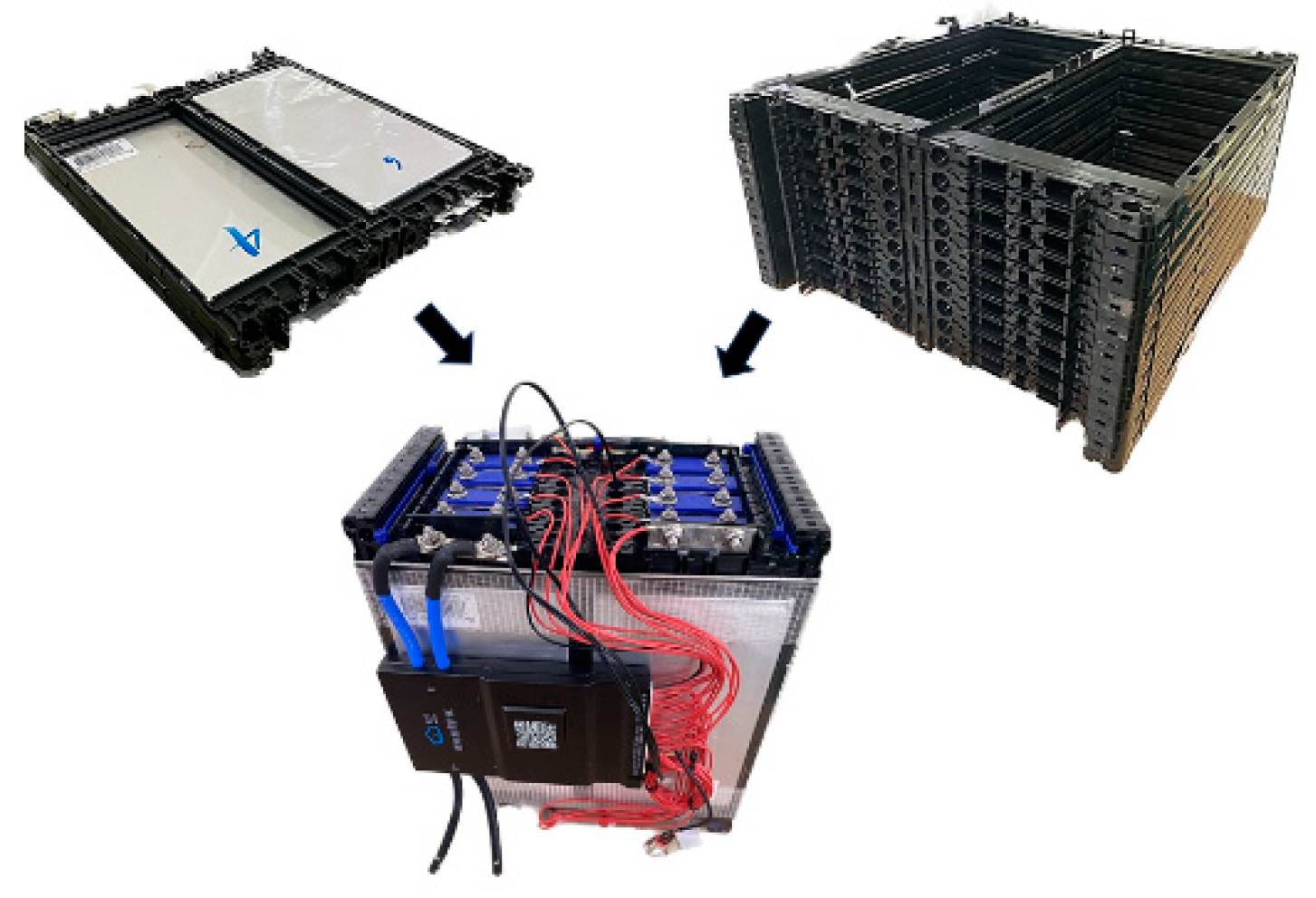
Figure 7.
Energy control system.
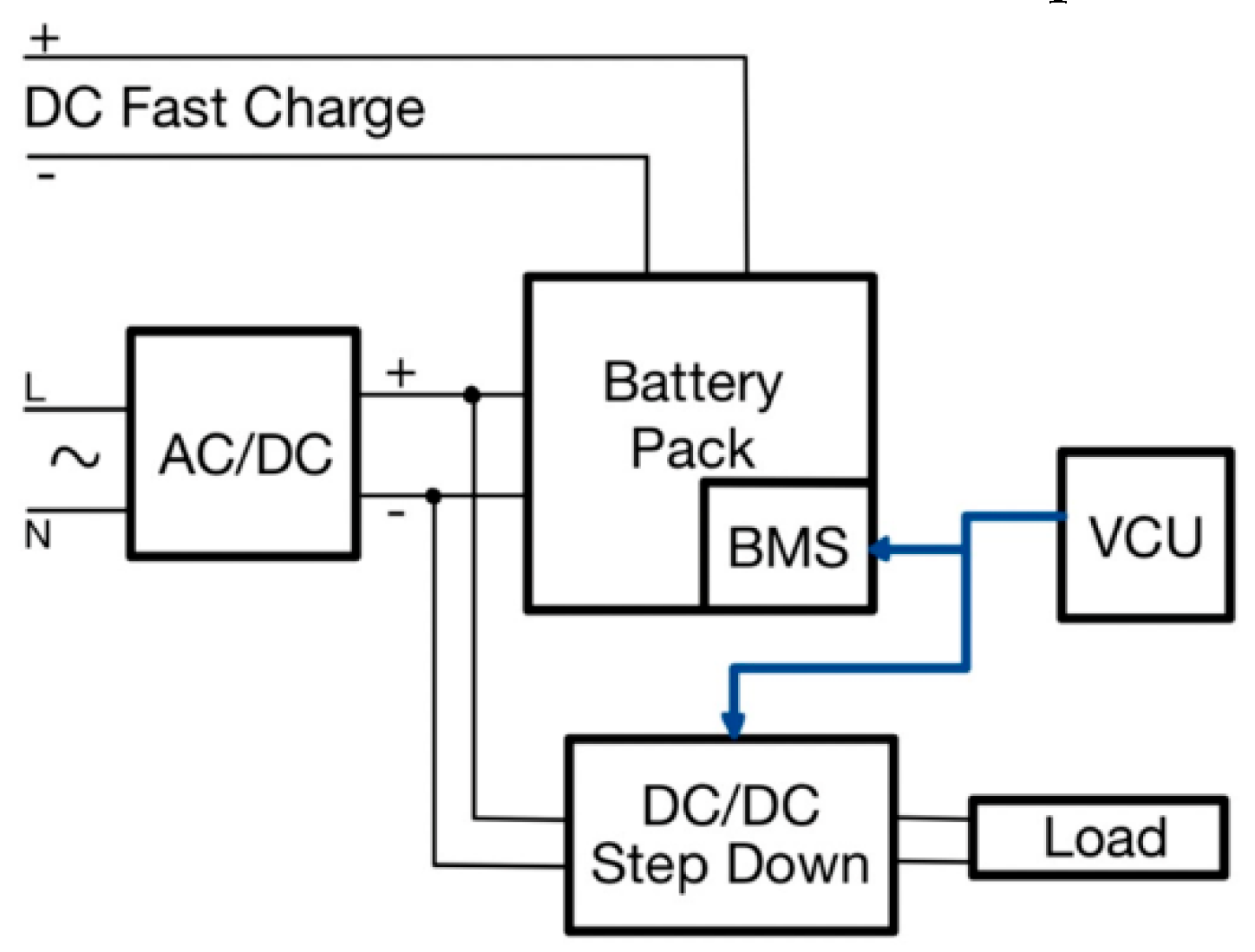
Figure 8.
CAN Bus Controller.
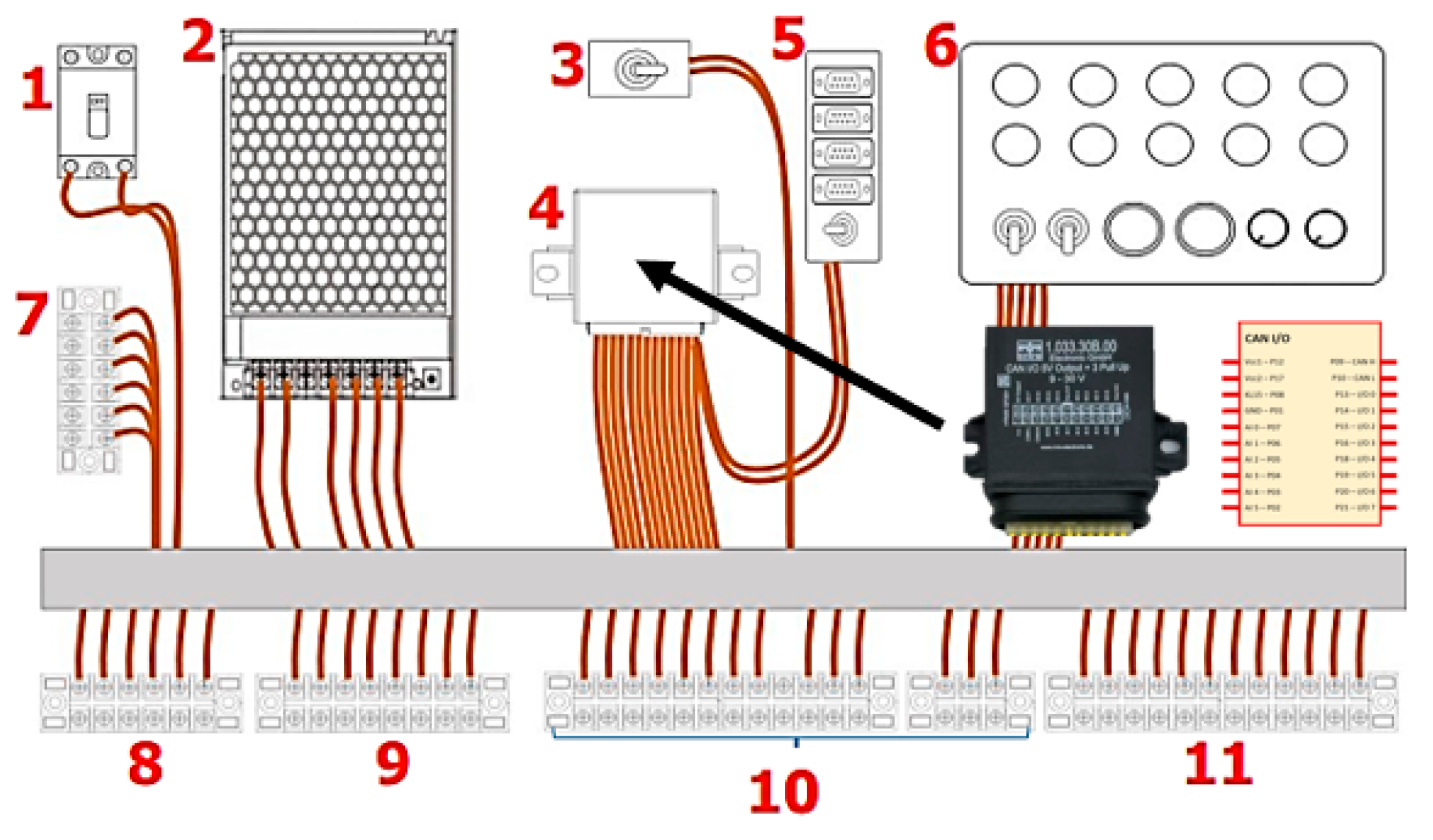
Figure 9.
Communication of CAN Bus Controller. .
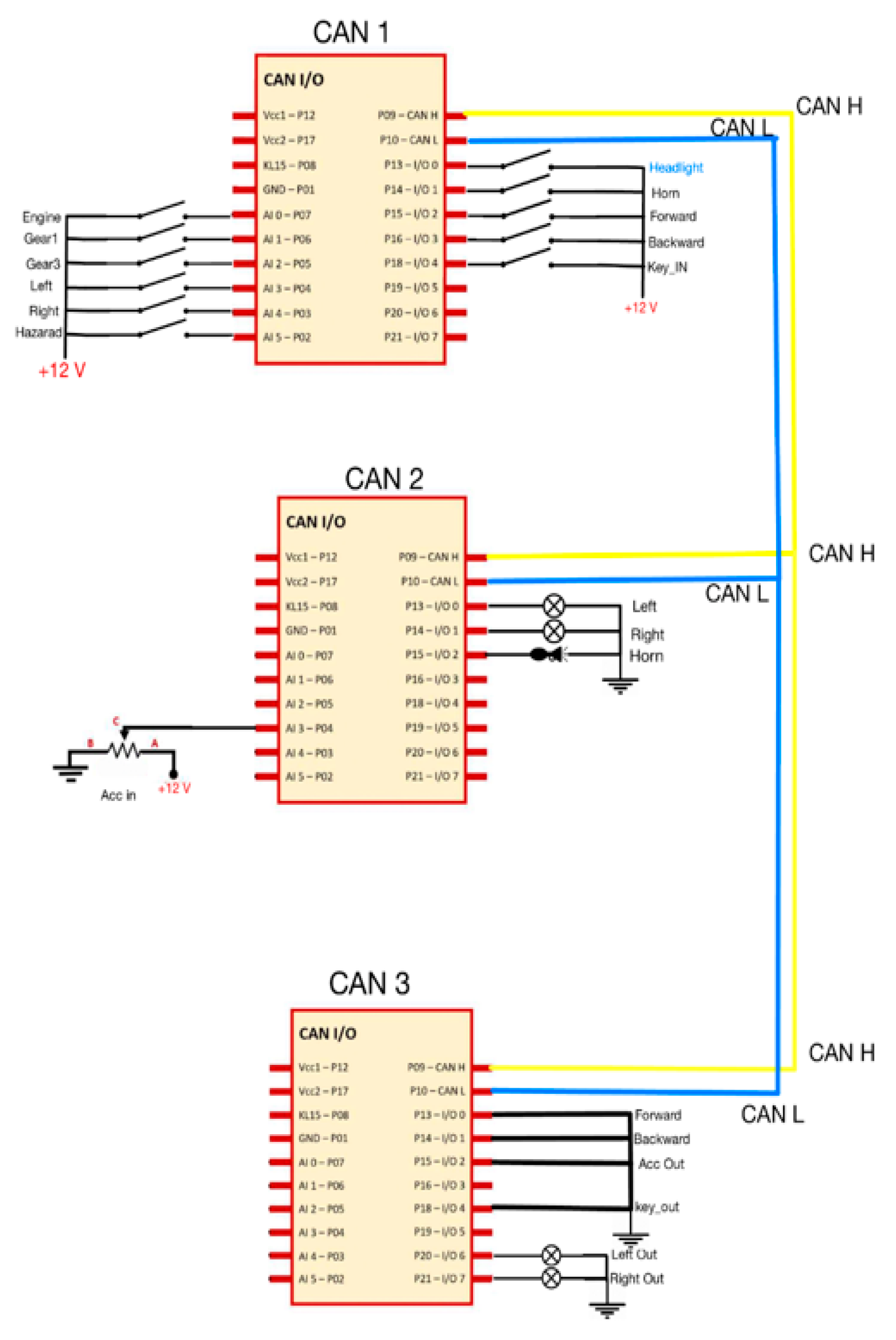
Figure 11.
MRS Developer Studio Software.
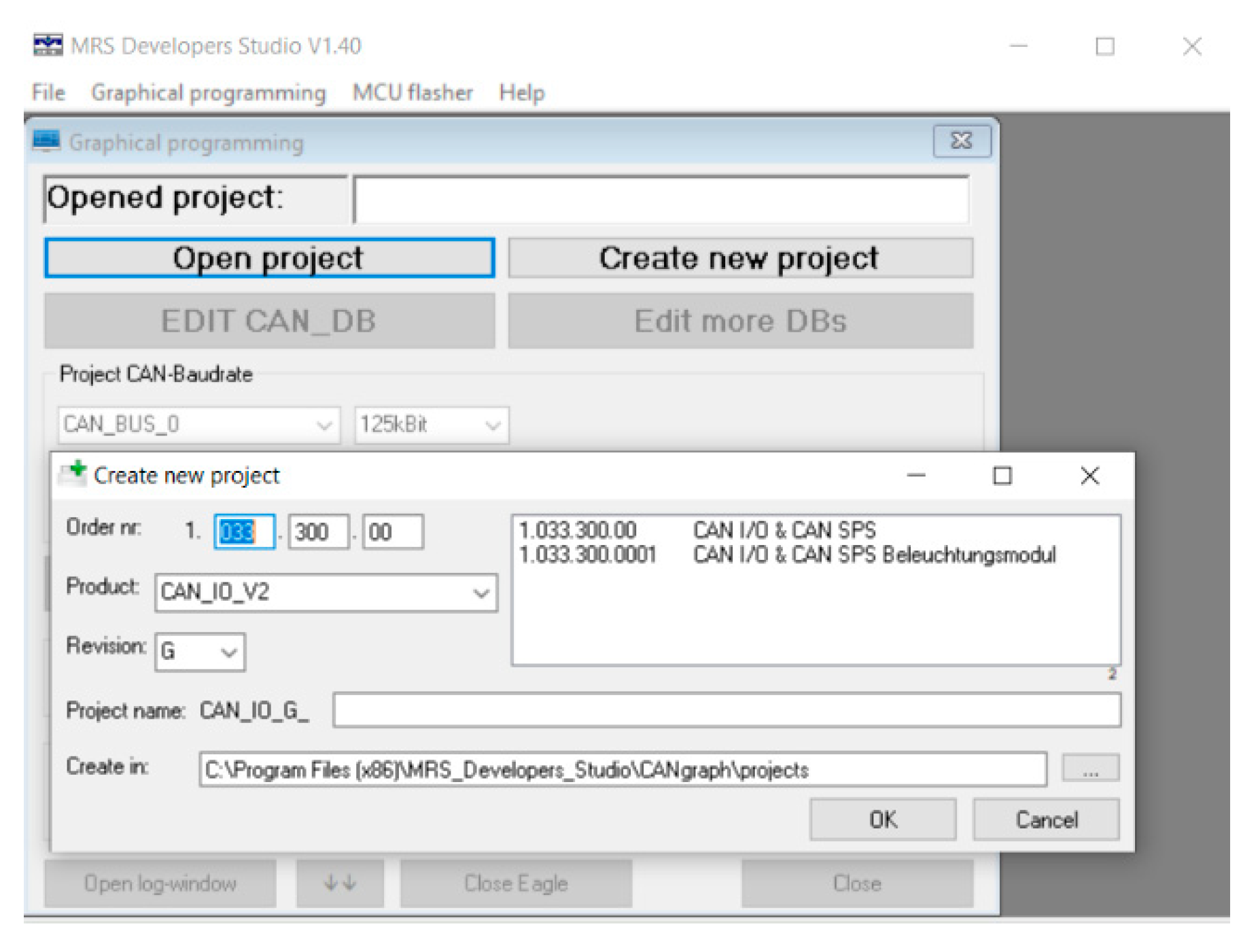
Figure 12.
Graphical programming.
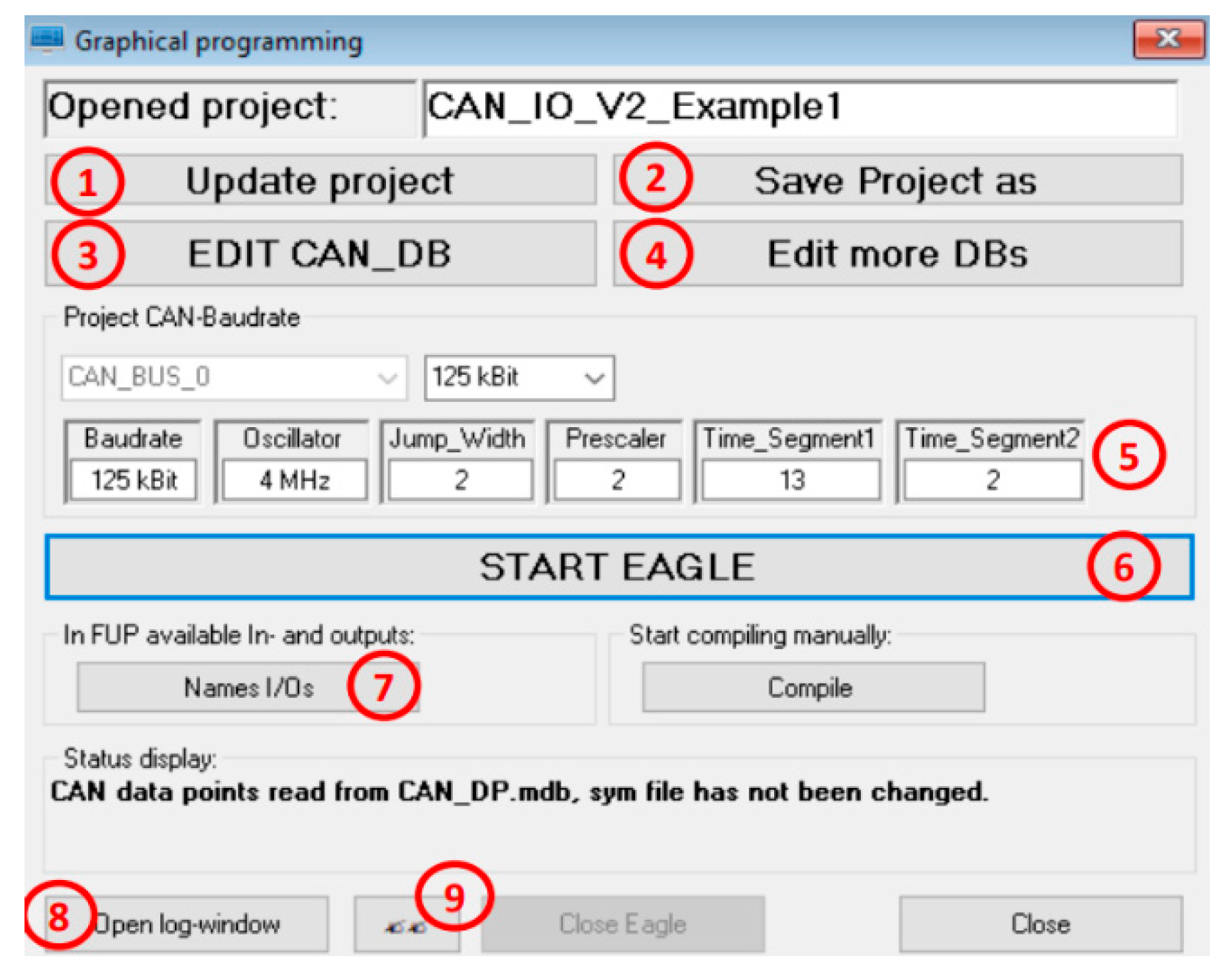
Figure 13.
Setting up communication in ATV devices (Information from Appendix A/B).
Figure 13.
Setting up communication in ATV devices (Information from Appendix A/B).
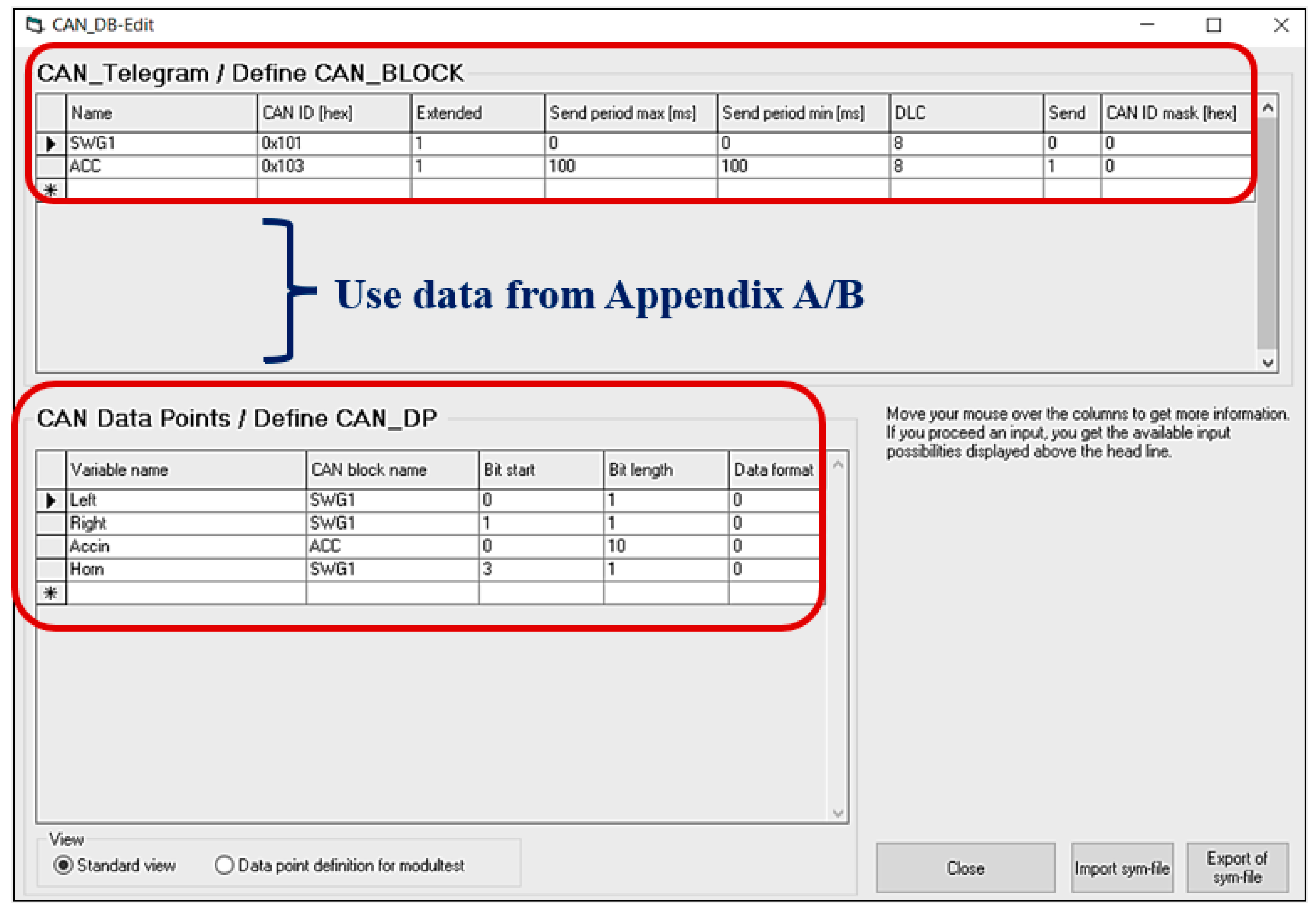
Figure 14.
Variables used to assist in writing A&D pins.
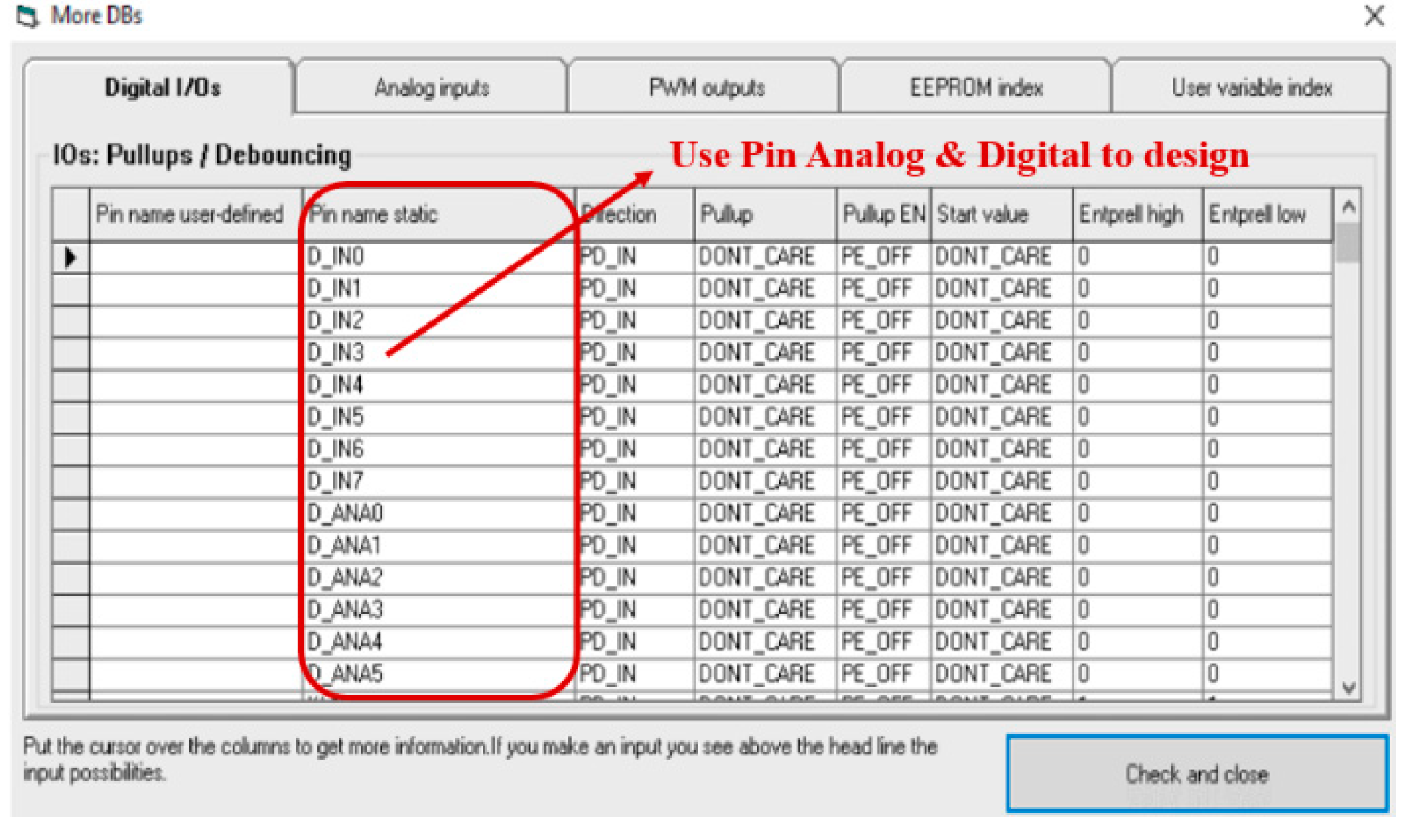
Figure 15.
Writing a program for signal lights.
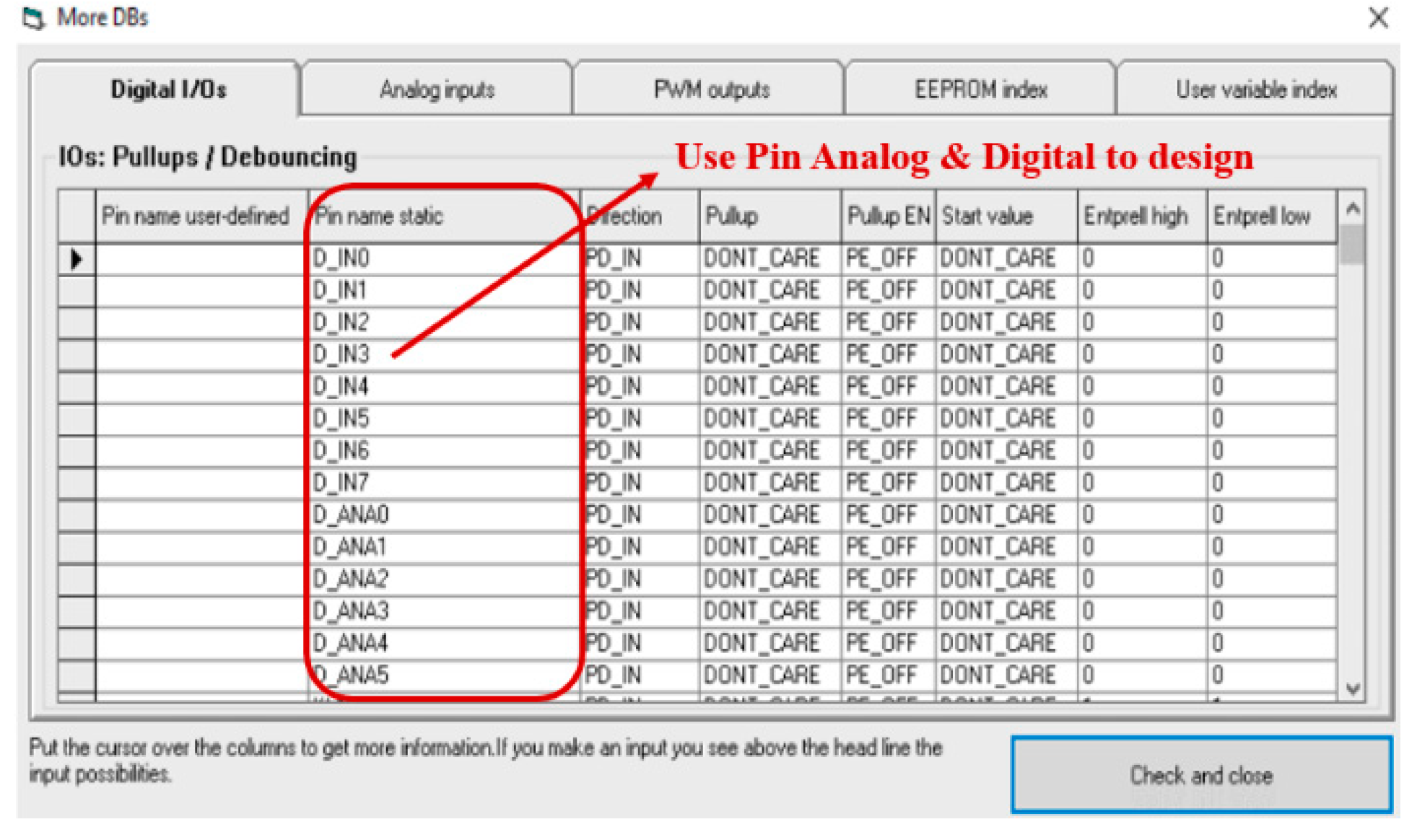
Figure 16.
Writing a program for horn, engine start, other light.
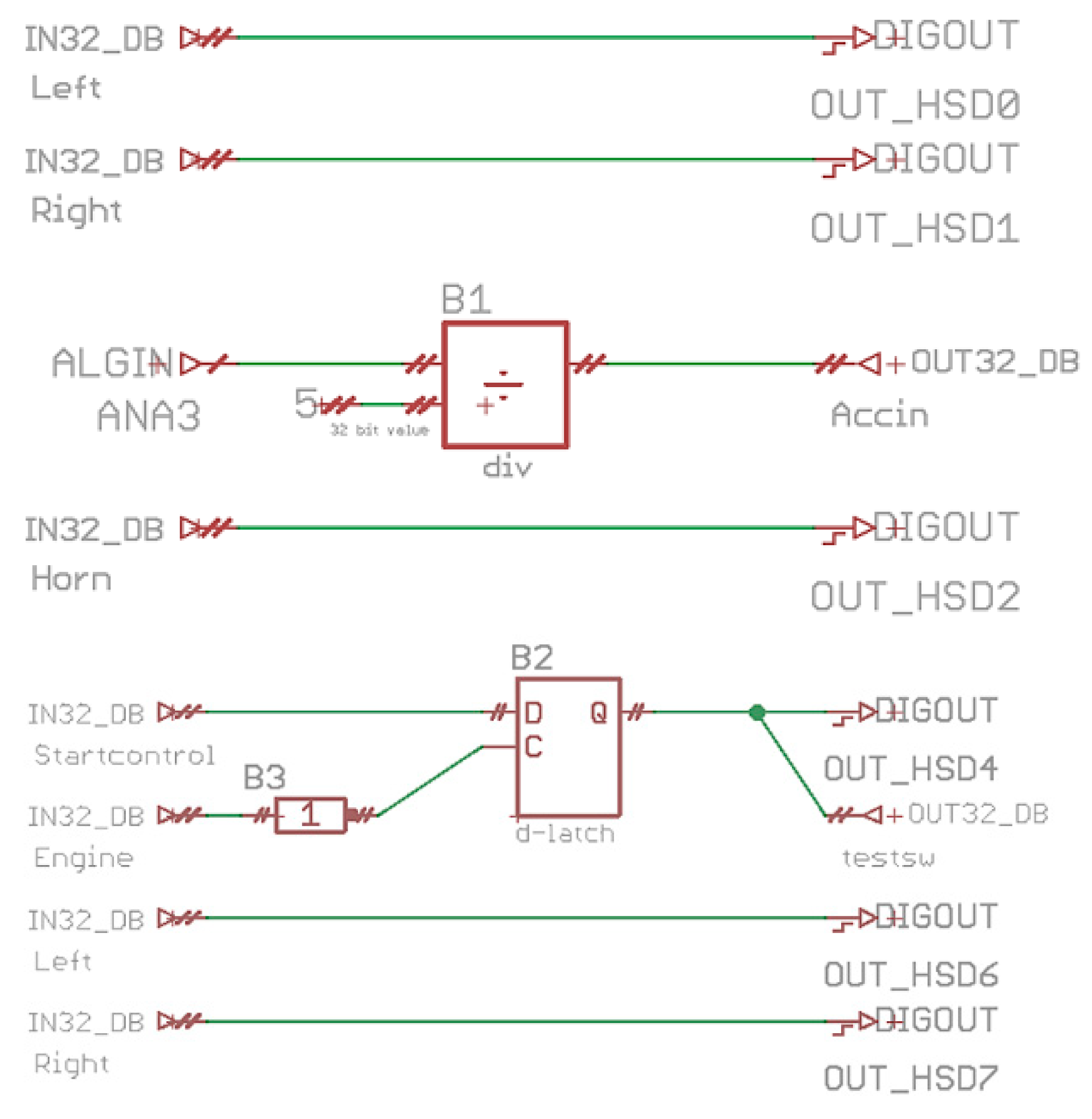
Figure 17.
Writing a program for forward-reverse gear and accelerator.
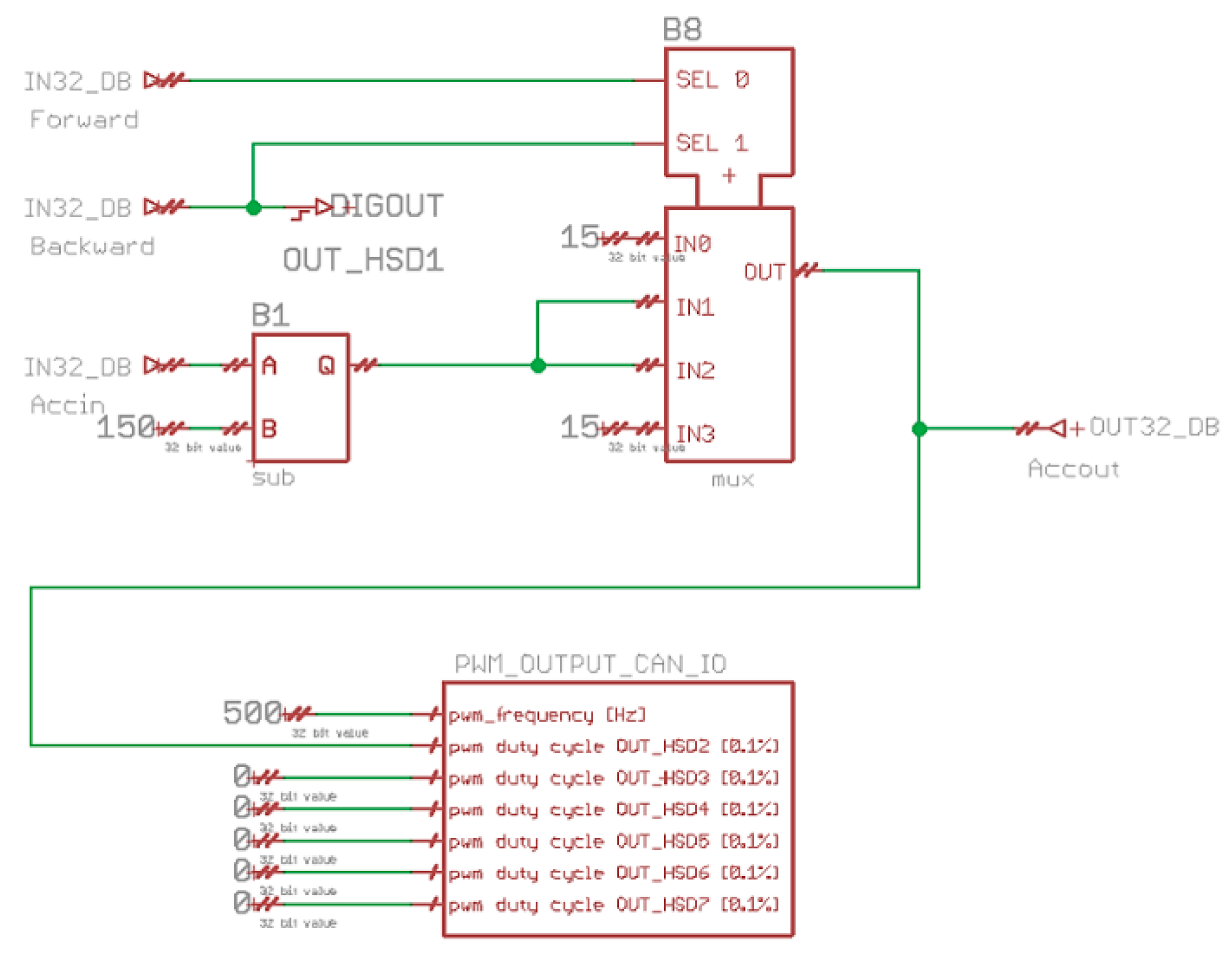
Figure 18.
Mechanical Structures of electric vehicle.
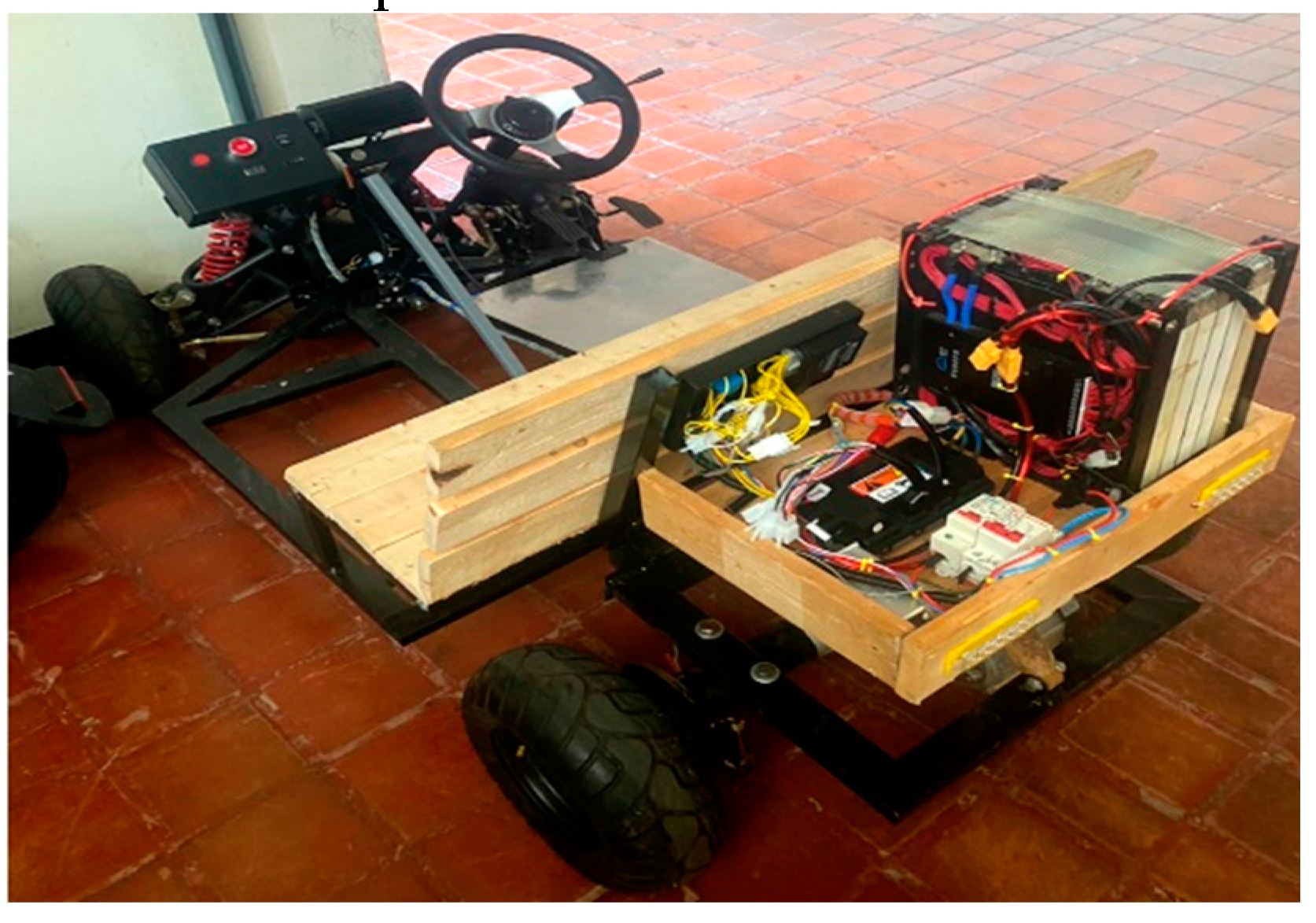
Figure 19.
Can Bus communication in ATV electric vehicle.
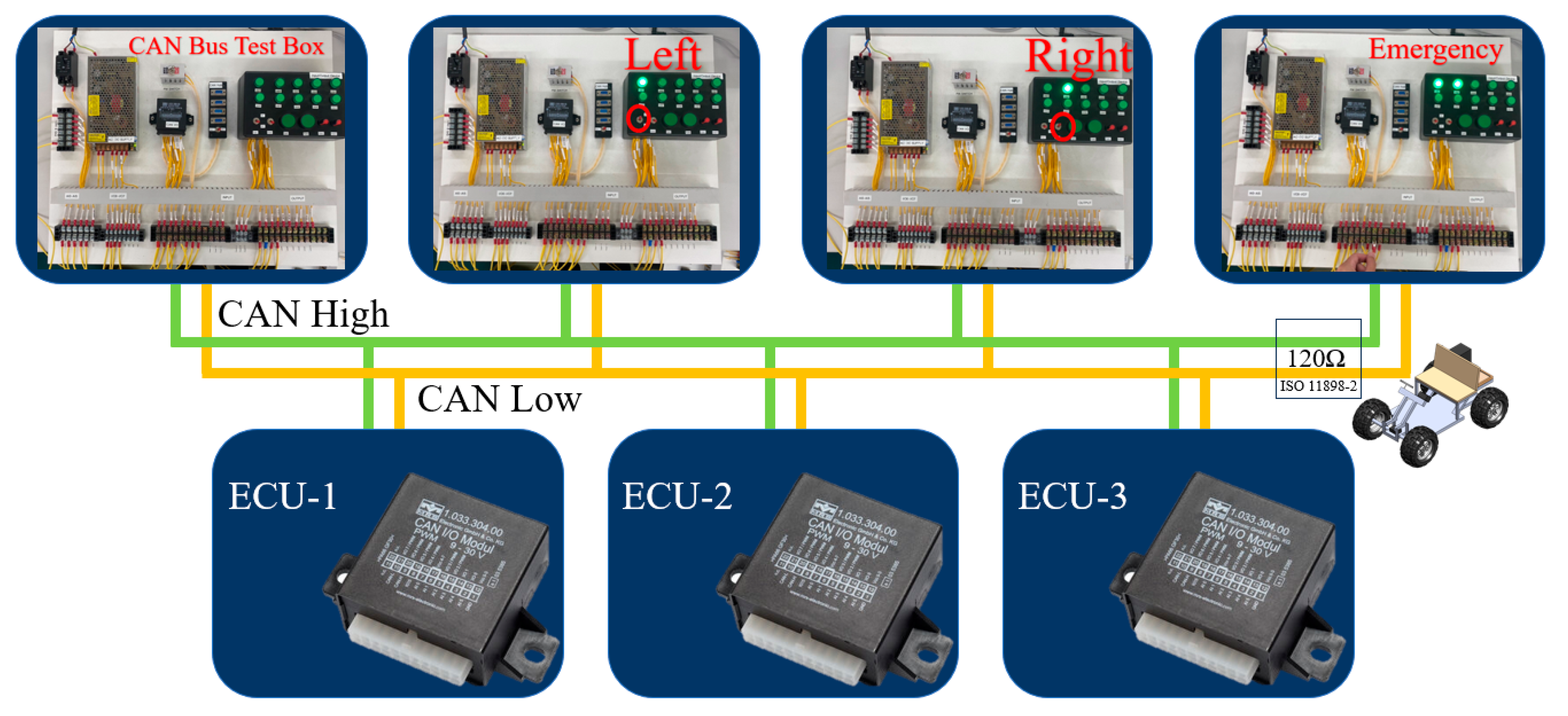
Figure 20.
Parameter of Battery Pack.
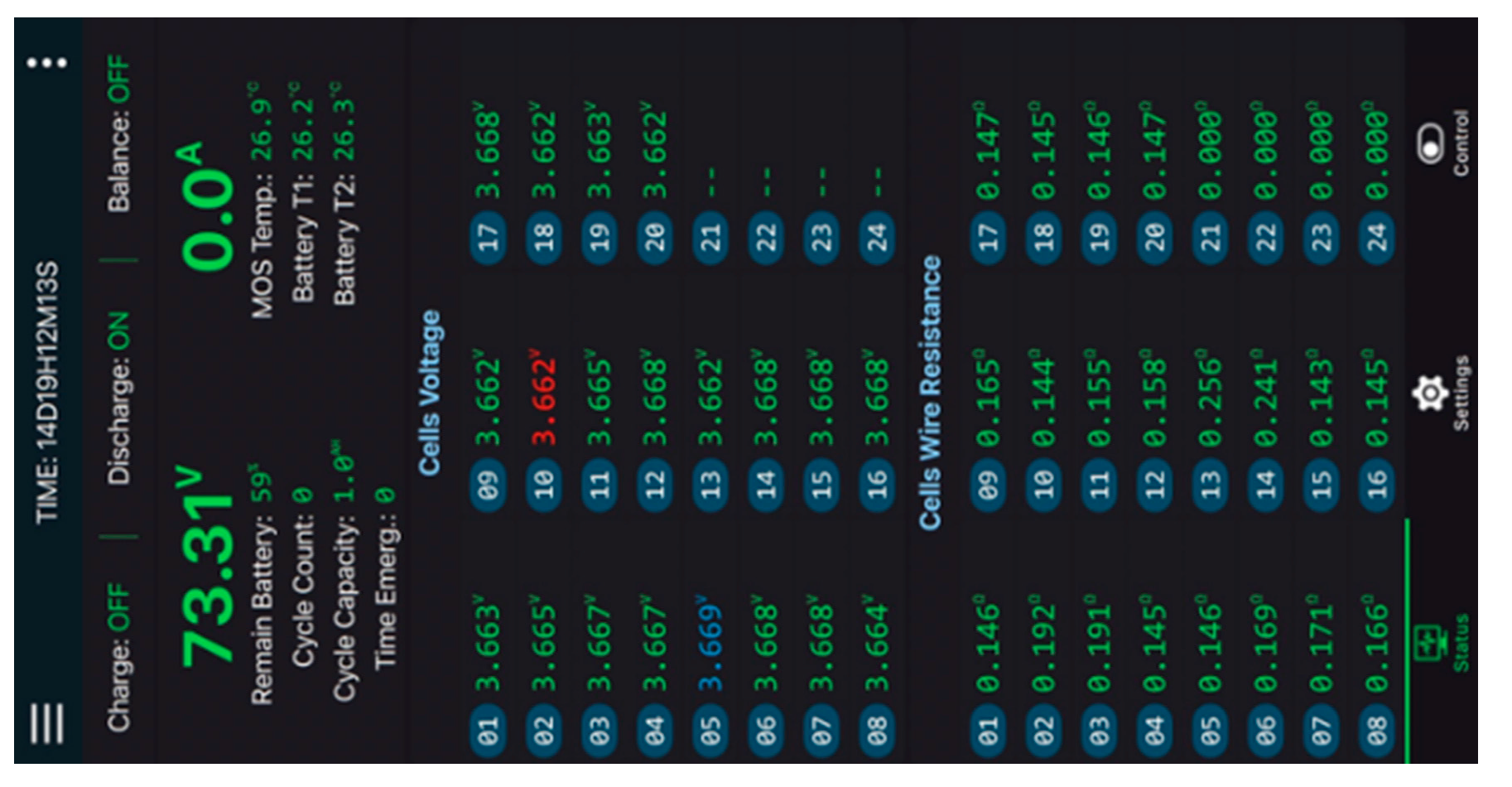
Table 1.
SAE.J1939 standard for communication in electric ATV vehicles.
|
Table 2.
Materials and Equipment for Communication in ATV Vehicle.
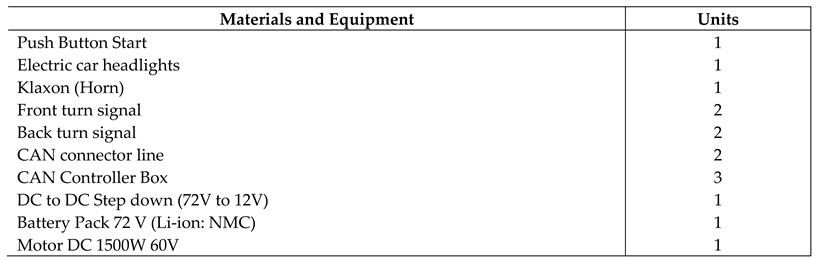 |
Table 3.
CAN-block definition.
| Header | Description |
|---|---|
| Name | Name of the CAN-Block |
| CAN ID [hex] | CAN-Identifier from CAN-Block in [hex] |
| Extended | 0 is 11 bits identifier, 1 is 29 bits identifier |
| Send period max | Time of send period max |
| Send period min | Time of send period min |
| Data length | Length of the CAN frame data in byte |
| Send | 0 is CAN-Block received the CAN bus1 is CAN-Block send to the CAN bus |
| CAN ID mask | When you want to listen to variable CAN ID information. (EX: 0x10F, 0x100) |
*Data can use from Appendix A and Appendix B.

Table 5.
Testing communication of the CAN Bus system.
| Testing CAN Bus communication | Testing (Counts) | ||
|---|---|---|---|
| 1 | 100 | 1000 | |
| Switches | ✓ | ✓ | ✓ |
| Headlights | ✓ | ✓ | ✓ |
| Turn signal | ✓ | ✓ | ✓ |
| Brake light | ✓ | ✓ | ✓ |
| Emergency light | ✓ | ✓ | ✓ |
| Horn | ✓ | ✓ | ✓ |
| Forward-Reverse gear | ✓ | ✓ | ✓ |
| Electric Accelerator | ✓ | ✓ | ✓ |
Table 6.
Testing communication in ATV.
 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



