
Submitted:
09 July 2023
Posted:
12 July 2023
You are already at the latest version
Abstract
This article is the second part of a scientific project under the general name "Geometrized vacuum physics". On the basis of the Algebra of Stignatures presented in the previous article [1], this article develops the main provisions of the Algebra of Signatures. Both of the above algebras are aimed at studying the properties of an ideal vacuum, but at the same time they are universal and can be applied in various branches of knowledge. It is shown that the signature of a quadratic form is related to the topology of the metric space for which the given quadratic form is a metric. Conditions are given under which an additive imposition of metric spaces with different topologies (or signatures) leads to a total Ricci flat space similar to a Calabi-Yau manifold. A spin-tensor representation of metrics with different signatures is considered and a Dirac bundle of quadratic forms is presented. This article does not contain physical applications of the Algebra of Signatures, but the potential power of this mathematical apparatus will be demonstrated in subsequent articles of this project.
Keywords:
vacuum
; geometrized vacuum physics
; signature
; algebra of signature
1. Introduction
This article is the second of a series of articles
under the general title "Geometrized vacuum physics ", and is devoted
to the presentation of the foundations of the Algebra of signatures.
In the first article [1],
a local volume of ideal vacuum was considered, in which, by means of probing
with mutually perpendicular light rays with a wavelength λm,n (from
the subrange Δλ = 10m÷ 10ncm), a 3Dm,n-cubic lattice was obtained (see Figure 1, or Figure
5 in [1])
Figure 1.
Non-curved 3D light lattice of λm,n-vacuum, revealed from the "vacuum" (emptiness) by means of mutually perpendicular monochromatic rays of light with a wavelength λm,n. The cells of such a lattice are cubes with edge length ε m÷n ~ 102·λm,n.
Figure 1.
Non-curved 3D light lattice of λm,n-vacuum, revealed from the "vacuum" (emptiness) by means of mutually perpendicular monochromatic rays of light with a wavelength λm,n. The cells of such a lattice are cubes with edge length ε m÷n ~ 102·λm,n.
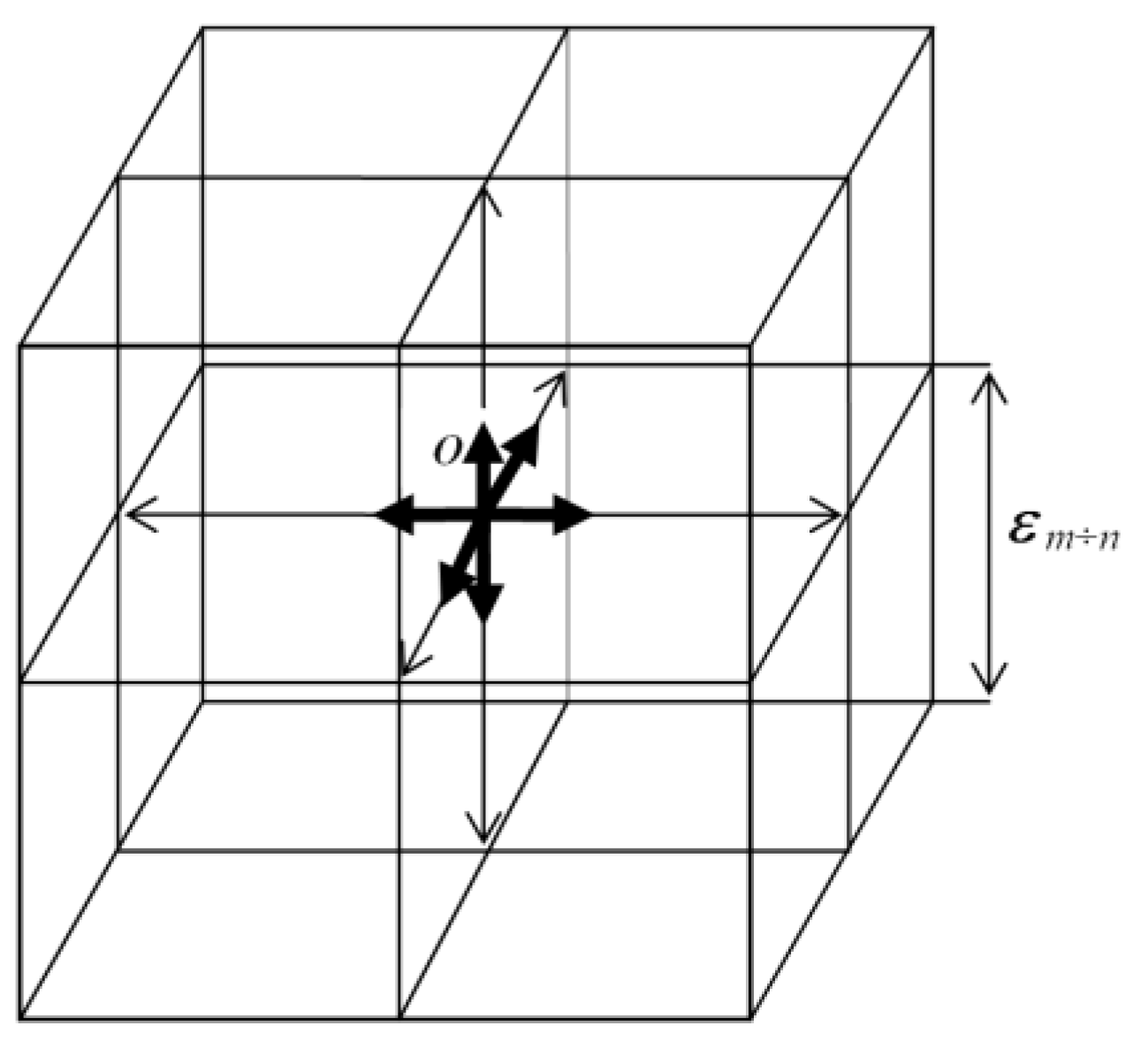
The three-dimensional extent revealed from the void
using such a luminous 3Dm,n cubic lattice
is called in [1] λm,n-vacuum or 3Dm,n-landscape.
In § 3 of the article [1],
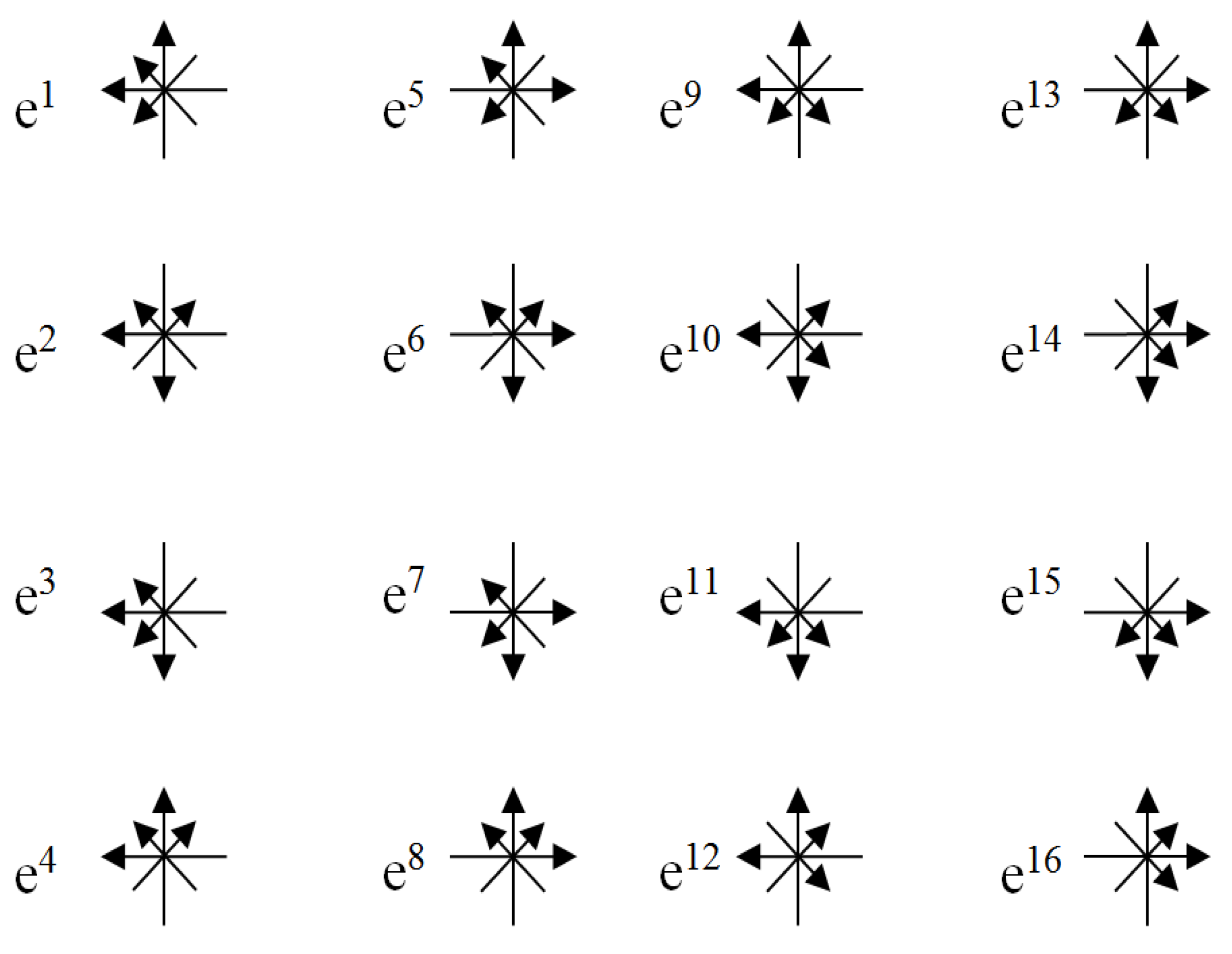
it was found that the number of orthogonal 3-bases that originate at the
central point O (see Figure 1),
taking into account the direction of the time axis, is 16
3-bases shown in Figure
2 correspond to sixteen types of affine spaces that can be characterized
by the corresponding signatures (see §4 and Table
1 in [1]). These sixteen stignatures of
affine spaces form the stignature matrix (3) in [1]:
Some properties of this matrix and the foundation
of the Algebra of stignatures are described in [1].
Figure 2.
Sixteen 4-bases starting at point O [1].
Figure 2.
Sixteen 4-bases starting at point O [1].
In this article, a transition is made from sixteen
affine spaces with stignatures (2), which originate at the point O, to
256 × 4 = 1024 metric spaces, which intersect at the same point, under the
condition of the "vacuum balance".
The conditions of "vacuum (i.e. zero) balance" were formulated in the article [1,2]: "If something is born from a vacuum, it is necessarily in a mutually opposite form (particle – antiparticle, convexity – concavity, wave – anti-wave, etc.), and on average remains equal to zero".
Moreover, each metric space is characterized by the
corresponding signature. The totality of these signatures forms a matrix of
signatures, the property of which is investigated in this article.
Also, in this second part of the "Geometrized
Vacuum Physics" the foundations of the Algebra of Signatures are laid,
which can be applied in various branches of scientific knowledge.
Together, the Algebra of Stignatures and the Algebra
of Signatures form a single universal mathematical apparatus that can serve as
the basis for describing and explaining many physical phenomena that were
previously difficult to comprehend. The application of this apparatus to
solving various physical problems will be presented in the following articles
of the proposed project.
2. Materials and Method
2.1 Transition from 16 affine spaces to 256 metric spaces
We pass from the sixteen affine spaces with 4-bases
shown in Figure 2 and their corresponding
signatures (2) to metric spaces.
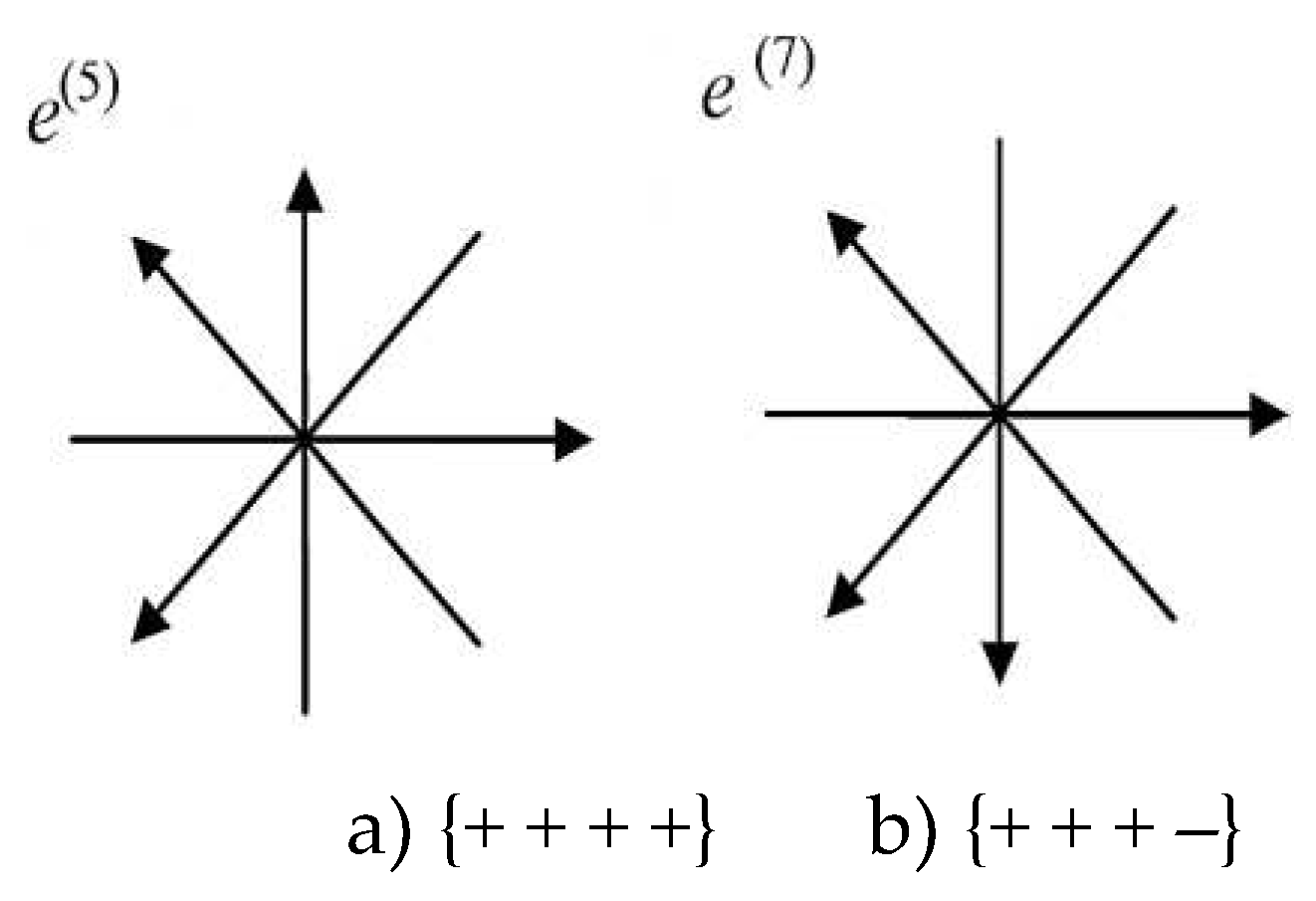
To do this, as an example, out of sixteen 4-bases
(see Figure 2), we choose the 4-basis ei(7)(e0(7),e1(7),e2(7),e3(7))
with signature {+ + + –} and 4-basis ei(5)
(e0(5), e1(5), e2(5),
e3(5)) with signature {+ + + +} (see Figure 3)
Figure 3.
Two 4-bases with different stignatures.
Let’s define two 4-vectors in affine spaces with
4-bases ei(5) and ei(7)
where dxi(k) is
the i-th projection of the 4-vector ds(k) onto
the xi(k) axis, whose direction is
determined by the basis vector ei(k).
ds(7) = ei(7)dxi(7) = e0(7)dx0(7) + e1(7)dx1(7) + e2(7)dx2(7) + e3(7)dx3(7),
ds(5) = ei(5)dxi(5) = e0(5)dx0(5) + e1(5)dx1(5) + e2(5)dx2(5) + e3(5)dx3(5),
Let’s find the scalar product of 4-vectors (48) and
(49)
ds(5,7) 2 = ds(5)ds(7) = ei(5)ej(7)dxi dxj =
= e0(5)e0(7)dx0dx0 + e1(5)e0(7)dx1dx0 + e2(5)e0(7)dx2dx0 + e3(5)e0(7)dx3dx0 +
+ e0(5)e1(7)dx0dx1 + e1(5)e1(7)dx1dx1 + e2(5)e1(7)dx2dx1 + e3(5)e1(7)dx3dx1 +
+ e0(5)e2(7)dx0dx2 + e1(5)e2(7)dx1dx2 + e2(5)e2(7)dx2dx2 + e3(5)e2(7)dx3dx2 +
+ e0(5)e3(7)dx0dx3 + e1(5)e3(7)dx1dx3 + e2(5)e3(7)dx2dx3 + e3(5)e3(7)dx3dx3.
= e0(5)e0(7)dx0dx0 + e1(5)e0(7)dx1dx0 + e2(5)e0(7)dx2dx0 + e3(5)e0(7)dx3dx0 +
+ e0(5)e1(7)dx0dx1 + e1(5)e1(7)dx1dx1 + e2(5)e1(7)dx2dx1 + e3(5)e1(7)dx3dx1 +
+ e0(5)e2(7)dx0dx2 + e1(5)e2(7)dx1dx2 + e2(5)e2(7)dx2dx2 + e3(5)e2(7)dx3dx2 +
+ e0(5)e3(7)dx0dx3 + e1(5)e3(7)dx1dx3 + e2(5)e3(7)dx2dx3 + e3(5)e3(7)dx3dx3.
For the case under consideration, the scalar
products of basis vectors ei(5)ej(7)
are:
for i = j e0(5)e 0(7) = 1, e1(5)e1(7) = 1, e2(5)e2(7) = 1, e3(5)e3(7) = –1,
for i ≠ j all ei(5)ej(7)
= 0.
In this case, Ex. (5) becomes the quadratic form
ds(5,7)2 = dx0dx0 + dx1dx1 + dx2dx2 – dx3dx3 = dx02 + dx12 + dx22 – dx32 , with signature (+ + + –).
Recall that the "signature" (the term of
general relativity) is an ordered set of signs in front of the corresponding
terms of the quadratic form.
To determine the signature of a metric space with
metric (7), instead of performing the scalar product of vectors (5), it
suffices to multiply the signs of the signatures of the 4-bases shown in Fig. 3:
{+ + + +}
{+ + + –}
(+ + + –)×
{+ + + –}
(+ + + –)×
In the numerator of the rank (8), the
multiplication of signs in each column is performed according to the rules
{+} × {+} = {+}; {–} × {+} = {–},
the result of such multiplication is written in the
denominator (under the line) of the same column. The performance of actions
according to these rules will be called rank multiplication.
Just as it was done with the vectors ds(5)
and ds(7) {see Exs. (3) – (9)}, we scalarly
multiply vectors from all 16 affine spaces with 4-bases, shown in Figure 3. As a result, we obtain 16 × 16 = 256 metric 4-spaces with 4-metrics of
the form
ds(а,b)2 = ei(а)ej(b)dxi(а)dxj(b),
where
a = 1, 2, 3, … , 16; b = 1, 2, 3, … , 16.
The signatures of these 16 × 16 = 256 metric 4-spaces can be determined, similarly to (8),
by rank multiplications of the signs of the signatures of the corresponding
affine spaces, for example:
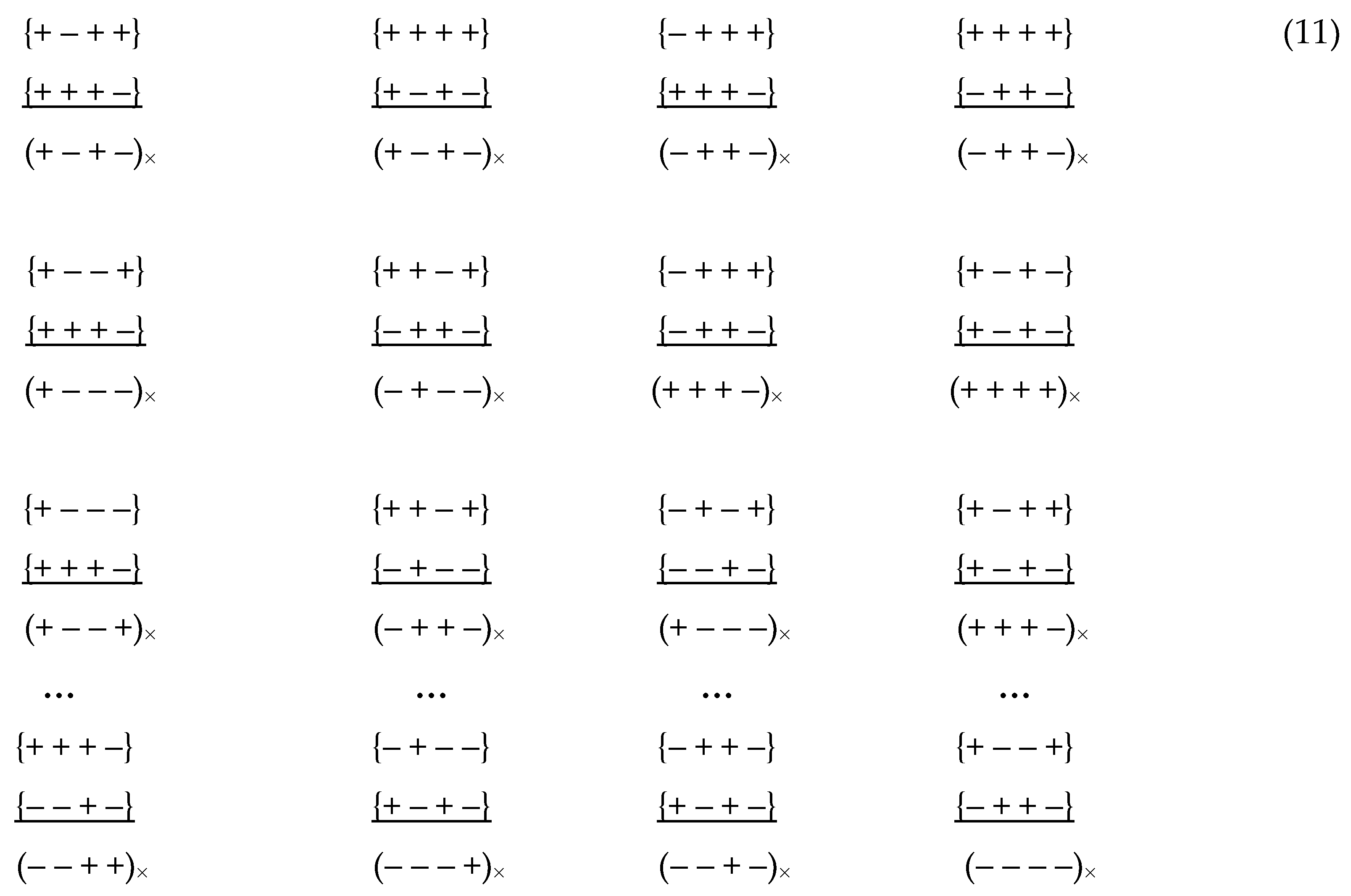
The point O (see Figure 1) is the intersection point of all 256
metric 4-spaces with 4-metrics (10) and the corresponding signature (11).
A set of 256 metric 4-spaces (4-maps) form a single
256-page "atlas" with a bonding point at point O, with a total number
of mathematical measurements 256 × 4 =
1024.
The sum of all 256 4-metrics (10) intersecting at
the point O is equal to zero
where k = 1,2,3,…,256 corresponds to one of
256 combinations a,b.
It is easy to verify that sum (12) is equal to
zero, since among 256 × 4 = 1024 signs of all 256 signatures there are 512 {+}
and 512 {–}. Thus, Ex. (12) satisfies the "vacuum balance" condition.
2.2 Four types of rank multiplication and division rules for different types of λm,n-vacuums
Within the framework of the Algebra of Signatures,
multiplication and division of signs in the numerators of ranks can be
performed according to the following four types of arithmetic rules, which are
assigned to four types of metric λm,n-vacuums:
I - rules for commutative metric λm,n-vacuum
(or λIm,n-vacuum):
{+} × {+} = {+} {–} × {+} = {–}
{+} × {–} = {–} {–} × {–} = {+}
{+} : {+} = {+} {–} : {+} = {–}
{+} : {–} = {–} {–} : {–} = {+};
H - rules for non-commutative metric λm,n-vacuum
(or λHm,n-vacuum):
{+} × {+} = {+} {–} × {+} = {+}
{+} × {–} = {–} {–} × {–} = {+}
{+} : {+} = {+} {–} : {+} = {+}
{+} : {–} = {–} {–} : {–} = {+};
V - rules for the commutative metric λm,n-antivacuum
(or λVm,n-vacuum):
{+} × {+} = {–} {–} × {+} = {+}
{+} × {–} = {+} {–} × {–} = {–}
{+} : {+} = {–} {–} : {+} = {+}
{+} : {–} = {+} {–} : {–} = {–};
H' - rules for non-commutative metric λm,n-antivacuum
(or λH'm,n-vacuum):
{+} × {+} = {–} {–} × {+} = {–}
{+} × {–} = {+} {–} × {–} = {–}
{+} : {+} = {–} {–} : {+} = {–}
{+} : {–} = {+} {–} : {–} = {–}.
For example, let's write the ranking (8) and
several other rankings from the list (11) for four types of λm,n-vacuums
with the corresponding multiplication rules (13), (15), (17), (19)
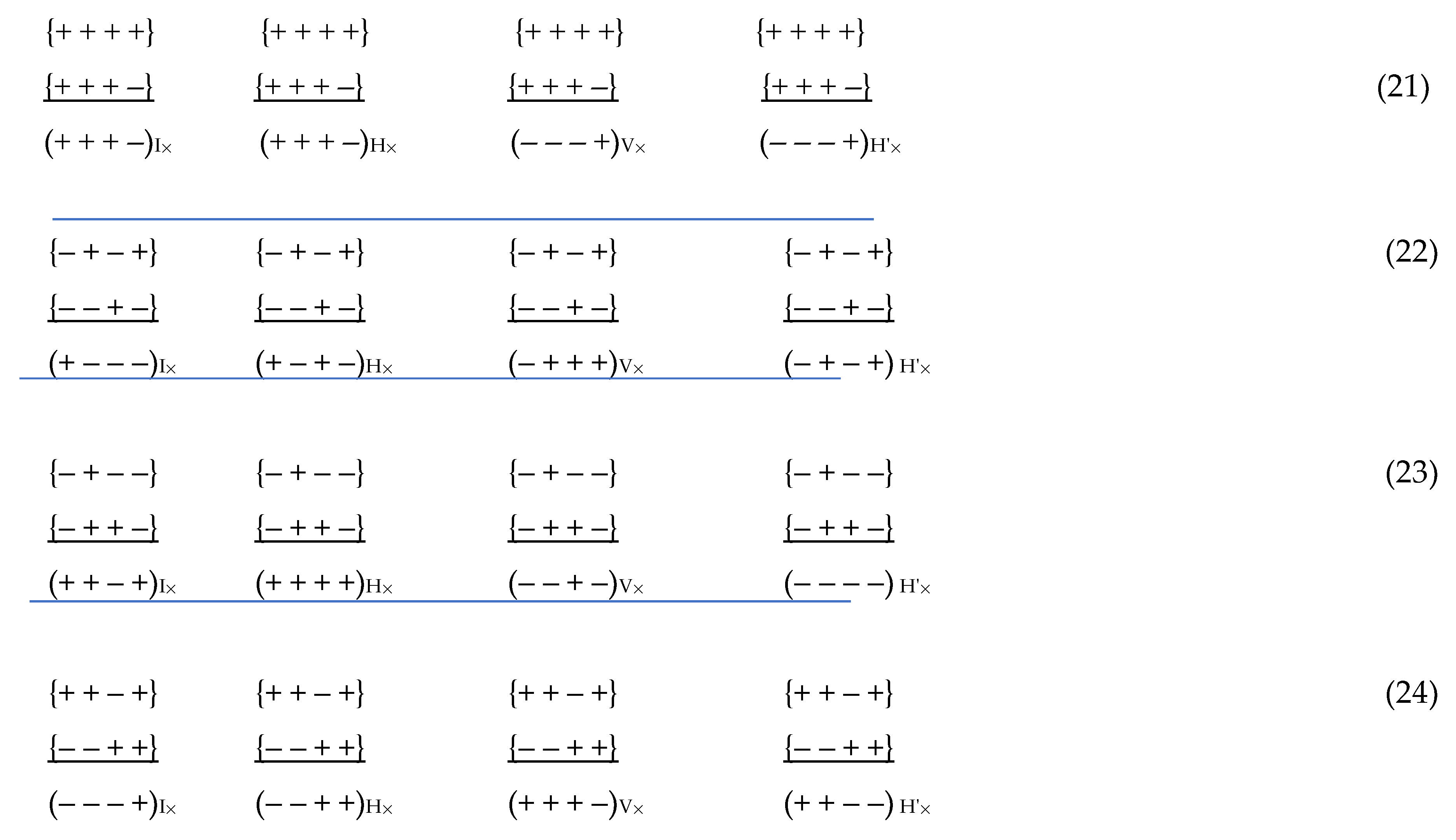
In this case, the sum of signs in the denominators
of each quadruple of ranks (21) – (24) is equal to zero, for example,
for four ranks (21) we have
(+ + + –) + (+ + + –) + (– – – +) + (– – – +) = 0,
and the sum of these signatures is equal to the
zero signature
(+ + + –) + (+ + + –) + (– – – +) + (– – – +) = (0 0 0 0).
This corresponds to the "vacuum balance"
condition.
Taking into account the four rules for
multiplication of signs (13), (15), (17), (19), it turns out that at the point O
under study (see Figure 1) four λLm,n-vacuums
or 256 × 4 = 1024 metric spaces intersect, which are characterized by metrics
(that is, quadratic forms) with the corresponding signatures.
The sum of all four metric λLm,n-vacuums
and, accordingly, the sum of all 1024 metrics is still equal to zero
λIm,n-vacuum + λHm,n-vacuum + λVm,n-vacuum + λ H'm,n-vacuum = 0,
which satisfies the requirement of maintaining the
"vacuum balance". The sum of metric λLm,n-vacuums
(27) {or quadratic forms (28)} will also be called "deep zero".
Metric λLm,n-vacuums
(27) are "supports" for each other and provide complete balancing of
the metric emptiness. In what follows, each metric λLm,n-vacuum
will be assigned a specific factorial of zero corresponding to one of the
multiplication rules (13), (15), (17), (19):
0I! = 1, 0H! = –1, 0V! = i, 0H'! = – i.
so that the sum of these factorials corresponds to
"true zero"
0I! + 0H! + 0V! + 0H'! = 1 + (–1) + i + (– i) = 0.
The identity of "deep zero" and
"true zero" will lead to closed completeness of the developed theory.
2.3 Signature matrix
As shown above, the scalar multiplication of the
sixteen 4-bases shown in Figure 2, with
each other led to the formation of an atlas of 16 × 16 = 256 metric spaces with
metrics (10) ds(аb)2
= ei(а)ej(b)dxi(а)dxj(b)
with the corresponding signatures. However, there are only 16 different
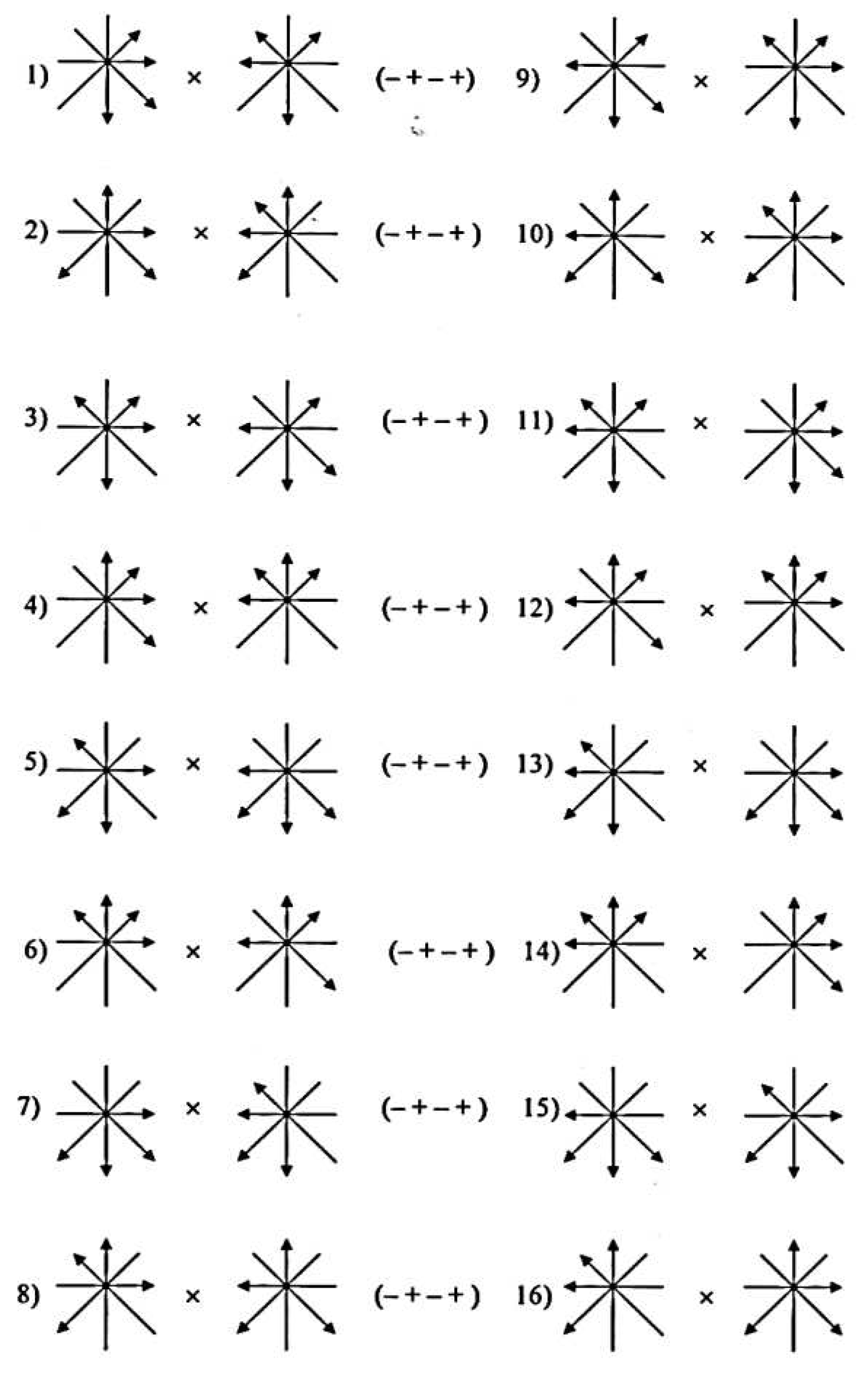
signatures, since there is a 16-fold degeneracy. For example, 16 scalar
products of 4-bases shown in Figure 4
result in sixteen quadratic forms (i.e., metrics) with the same signature (– +
– +):
Figure 4.
Sixteen scalar products of 4-bases, resulting in to metrics with the same signature (– + – +).
Figure 4.
Sixteen scalar products of 4-bases, resulting in to metrics with the same signature (– + – +).
Similarly, we obtain 16-fold degeneracy with all
other metric spaces. Thus, it is possible to single out only 256 : 16 = 16
types of metric 4-spaces with quadratic forms (i.e., metrics)
with the corresponding signatures, which form a
matrix
The elements of the matrix of signatures (32)
completely coincide with the elements of the matrix of signatures (2) {or (3)
in the article [1]}. Therefore, the properties
of the signature matrix (32) largely repeat the properties of the signature
matrix (see [1]) in the next branch of the
theory development.
2.4 Relationship between signature and 4-space topology
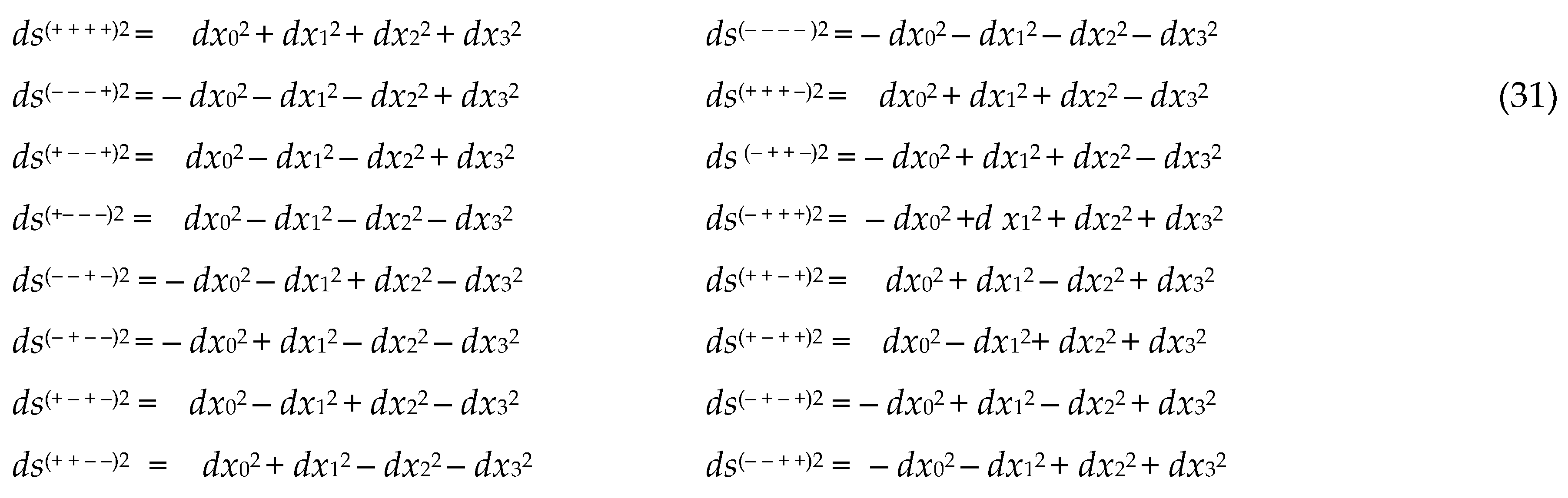
According to Felix Klein's classification [3], metric spaces with metrics (31) can be divided
into three topological types:
1st type: 4-spaces whose signatures consist
of four identical signs [3]:
are the so-called null metric 4-spaces. These
"spaces" have only one real point, located at the beginning of the
light cone. All other points of these extensions are imaginary. In fact, the
first of the Exs. (33) describes not the “extent”, but a single point (or
“white” point), and the second describes the only anti-point (or “black”
point).
x02 + x12 +x22 +x32 = 0 (+ + + +)
– x02 – x12 – x22 – x32 = 0 (– – – –)
2nd type: 4-spaces whose signatures consist
of two positive and two negative signs [3]:
are different variants of 4-dimensional tori.
x02 – x12 – x22 + x32 = 0 (+ – – +)
x02 + x12 – x22 – x32 = 0 (+ + – –)
x02 – x12 + x22 – x32 = 0 (+ – + –)
– x02 + x12 + x22 – x32 = 0 (– + + –)
– x02 – x12 + x22 + x32 = 0 (– – + +)
– x02 + x12 – x22 + x32 = 0 (– + – +)
x02 – x12 + x22 – x32 = 0 (+ – + –)
– x02 + x12 + x22 – x32 = 0 (– + + –)
– x02 – x12 + x22 + x32 = 0 (– – + +)
– x02 + x12 – x22 + x32 = 0 (– + – +)
3rd type: 4-spaces whose signatures consist
of three identical signs and one opposite one [3]:
are oval 4-surfaces: ellipsoids, elliptic
paraboloids, two-sheeted hyperboloids.
– x02 – x12 – x22 + x32 = 0 (– – – +)
– x02 – x12 + x22 – x32 = 0 (– – + –)
– x02 + x12 – x22 – x32 = 0 (– + – –)
x02 – x12 – x22 – x32 = 0 (+ – – –)
x02 + x12 + x22 – x32 = 0 (+ + + –)
x02 + x12 – x22 + x32 = 0 (+ + – +)
x02 – x12 + x22 + x32 = 0 (+ – + +)
– x02 + x12 + x22 + x32 = 0 (– + + +)
– x02 + x12 – x22 – x32 = 0 (– + – –)
x02 – x12 – x22 – x32 = 0 (+ – – –)
x02 + x12 + x22 – x32 = 0 (+ + + –)
x02 + x12 – x22 + x32 = 0 (+ + – +)
x02 – x12 + x22 + x32 = 0 (+ – + +)
– x02 + x12 + x22 + x32 = 0 (– + + +)
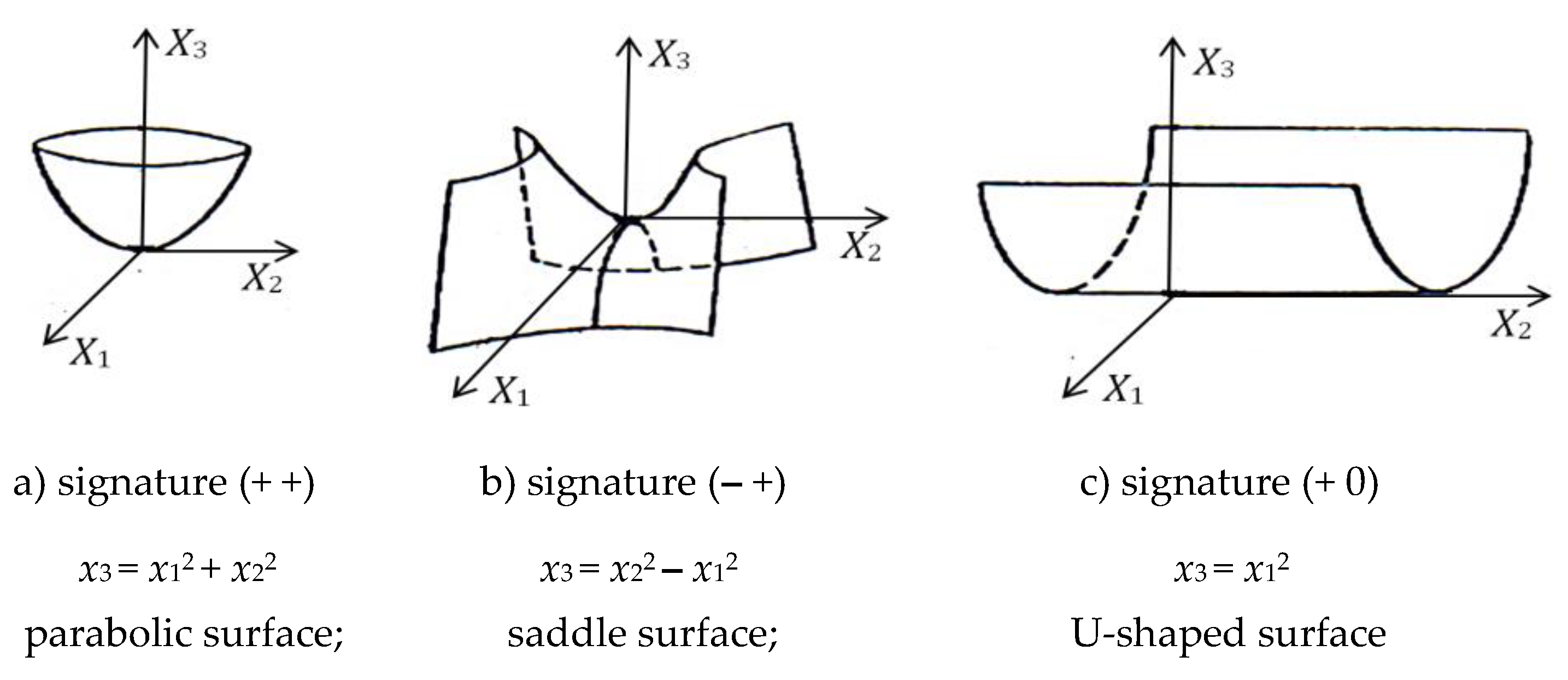
A simplified illustration of the connection between
the signature of a 2-dimensional space and its topology is shown in Figure 5. This figure shows that the signature
of the quadratic form is uniquely related to the topology of the 2-dimensional
extent. But not vice versa, the extension topology is a much more capacious
concept than the signature of its metric.
Figure 5.
Illustration of the connection between the signature of a 2-dimensional space and its topology [3].
Figure 5.
Illustration of the connection between the signature of a 2-dimensional space and its topology [3].
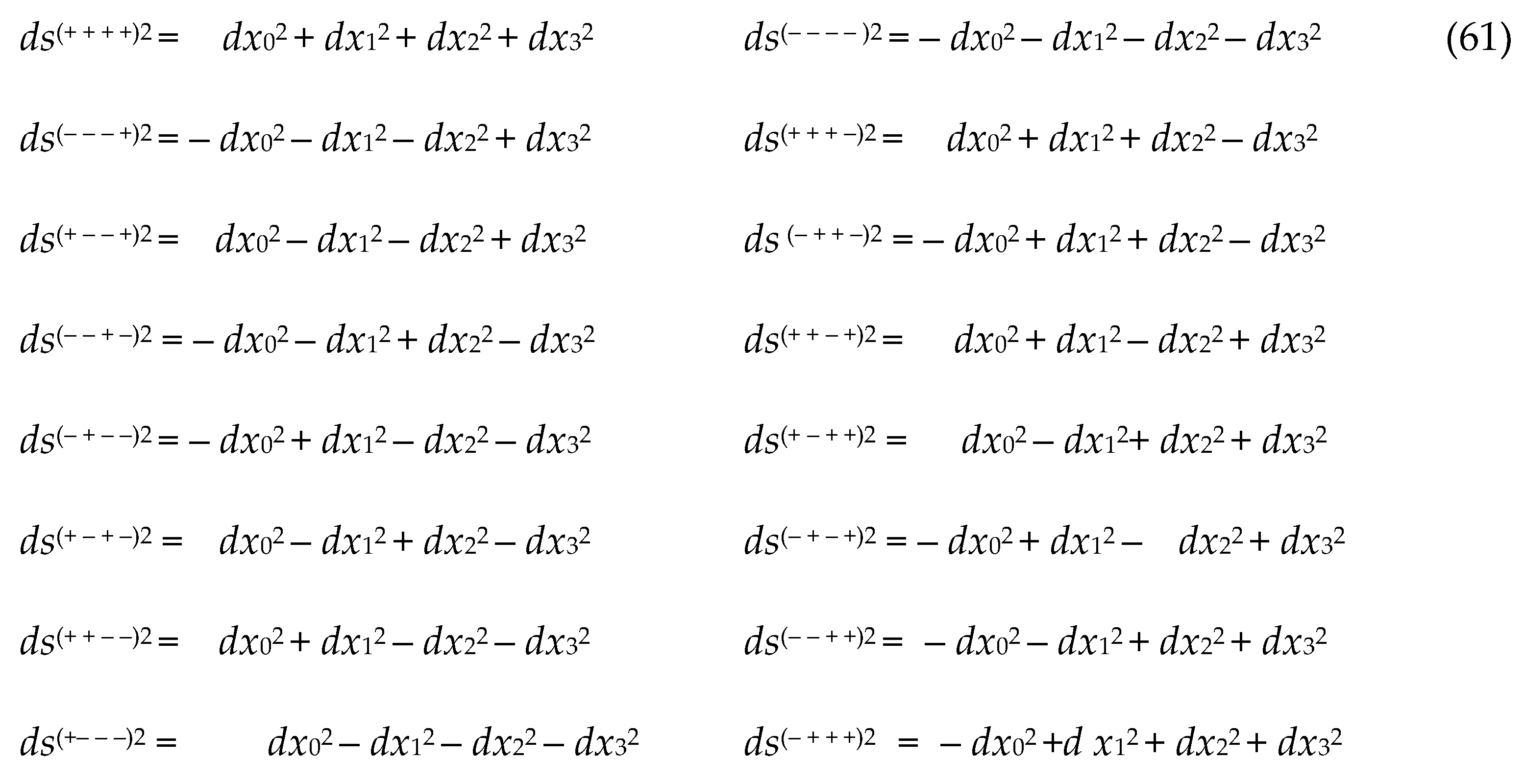
2.5 Splitting the metric zero
The sum of all 16 metrics (31) is zero:
dsΣ2 = ds(+– – –)2 + ds(+ + + +)2 + ds(– – – +)2 + ds(+ – – +)2 +
+ ds(– – + –)2 + ds(+ + – –)2 + ds(– + – –)2 + ds(+ – + –)2 +
+ ds(– + + +)2 + ds(– – – – )2 + ds(+ + + –)2 + ds (– + + –)2 +
+ ds(+ + – +)2 + ds(– – + +)2 + ds(+ – + +)2 + ds(– + – +)2 = 0.
+ ds(+ + – +)2 + ds(– – + +)2 + ds(+ – + +)2 + ds(– + – +)2 = 0.
Indeed, summing metrics (31), we obtain
dsΣ2 = (dx0dx0 – dx1dx1 – dx2dx2 – dx3dx3) + (dx0dx0 + dx1dx1 + dx2dx2 + dx3dx3) +
+ (– dx0dx0 – dx1dx1 + dx2dx2 – dx3dx3) + (dx0dx0 – dx1dx1 – dx2dx2 + dx3dx3) +
+ (– dx0dx0 – dx1dx1 + dx2dx2 – dx3dx3) + (dx0dx0 + dx1dx1 – dx2dx2 – dx3dx3) +
+ (– dx0dx0 + dx1dx1 – dx2dx2 – dx3dx3) + (dx0dx0 – dx1dx1 + dx2dx2 – dx3dx3 ) +
+ (– dx0dx0 + dx1dx1 + dx2dx2 + dx3dx3) + (– dx0dx0 –dx1dx1– dx2dx2 –dx3dx3) +
+ (dx0dx0 + dx1dx1 + dx2dx2 – dx3dx3) + (– dx0dx0 +dx1dx1 +dx2dx2 – dx3dx3) +
+ (dx0dx0 + dx1dx1 – dx2dx2 + dx3dx3) + (– dx0dx0 – dx1dx1+ dx2dx2 +dx3dx3) +
+ (dx0dx0 – dx1dx1 + dx2dx2 + dx3dx3) + (– dx0dx0 + dx1dx1 –dx2dx2 +dx3dx3) = 0.
+ (– dx0dx0 – dx1dx1 + dx2dx2 – dx3dx3) + (dx0dx0 + dx1dx1 – dx2dx2 – dx3dx3) +
+ (– dx0dx0 + dx1dx1 – dx2dx2 – dx3dx3) + (dx0dx0 – dx1dx1 + dx2dx2 – dx3dx3 ) +
+ (– dx0dx0 + dx1dx1 + dx2dx2 + dx3dx3) + (– dx0dx0 –dx1dx1– dx2dx2 –dx3dx3) +
+ (dx0dx0 + dx1dx1 + dx2dx2 – dx3dx3) + (– dx0dx0 +dx1dx1 +dx2dx2 – dx3dx3) +
+ (dx0dx0 + dx1dx1 – dx2dx2 + dx3dx3) + (– dx0dx0 – dx1dx1+ dx2dx2 +dx3dx3) +
+ (dx0dx0 – dx1dx1 + dx2dx2 + dx3dx3) + (– dx0dx0 + dx1dx1 –dx2dx2 +dx3dx3) = 0.
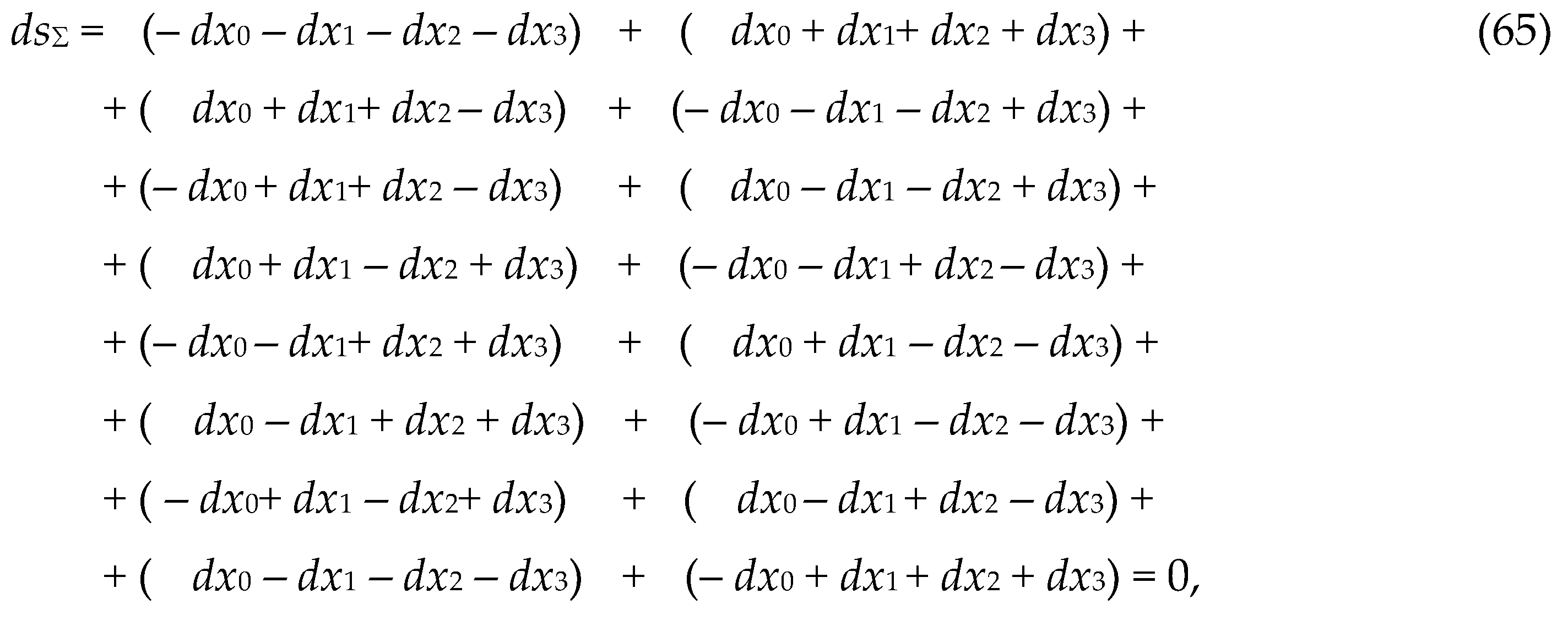
Instead of summing homogeneous terms in Ex. (37),
only the signs in front of these terms can be summed. Therefore, the total
metric (37) can be represented as a ranking expression:
where the summation (or subtraction) of signs is
carried out according to the rules:
(+) + (+) = 2(+), (–) + (+) = (0), (+) – (+) = (0), (–) – (+) = 2(–),
(+) + (–) = (0), (–) + (–) = 2(–), (+) – (–) = 2(+), (–) – (–) = (0).
The sum of the signs, both in the columns of the
ranks (38) and in their lines between the ranks, is equal to zero. Therefore,
this ranking identity will be called the "splitting of the metric
zero".
2.6 Operations with ranks
The ranking expression (38) makes it possible to
perform some operations in the vicinity of the investigated point O (see
Figure 1) without violating the “vacuum
balance”. Such operations include, for example, the symmetrical transfer of the
first and last columns to the other side of equality with sign inversion, while
observing line-by-line and column-by-column vacuum balance:
Similarly, any columns of the rank expression (38)
can be symmetrically transferred to the other side like (40).
It is possible to transfer any string from the
numerators of the rankings (38) to their denominators, also with the inversion
of signs, and observing the line-by-line vacuum balance, for example:
Mixed line and column transfer operations are also
possible, which do not violate the conditions of line-by-line vacuum balance,
for example
Such a ranking operations correspond to certain
vacuum symmetries, which will be considered in the following articles of the
proposed project.
2.7 Bilateral metric space
We transfer the signatures (– + + +) and (+ – – –)
from the numerators of the ranks (38) to their denominators
In expanded form, the ranks (43) have the following
form
The ranking expression (44) is equivalent to the
fact that the addition (i.e., additive overlay) of 7-metric spaces with
signatures (topologies) indicated in the numerator of the left ranking (43)
form a metric Minkowski 4-space with the metric
ds(+ – – –)2 = c2dt2 – dx2 – dy2 – dz2 = dx02 – dx12 – dx22 – dx32 with signature (+ – – –),
where ds(+ – – –)2 = ds(+ + + +)2 + ds(– – – +)2 + ds(+ – – +)2 + ds(– – + –)2 + ds(+ + – –)2 + ds (– + – –)2 + ds(+ – + –)2,
this Minkowski 4-space will be conditionally called
the outer side of the λm,n
-vacuum (or subcont – short for “substantial continuum”).
In this case, the additive imposition of 7 metric
spaces with signatures indicated in the numerator of the right-th rank (43)
forms a metric Minkowski 4-antispace with the metric
ds(– + + +)2 = – c2dt2 + dx2 + dy2 + dz2 = – dx02 + dx12 + dx22 + dx32 with signature (– + + +),
where ds(– + + +)2 = ds(– – – – )2 + ds(+ + + –)2 + ds(– + + –)2 + ds(+ + – +)2 + ds(– – + +)2 + ds(+ – + +)2 + ds(– + – +)2.
This metric Minkowski 4-antispace will be
conditionally called the inner side of the λm,n -vacuum (or
antisubcont – short for “antisubstantial continuum”.
The concepts of "subcont" and
"antisubcont" are mental constructions that are intended only
to create the illusion of "visibility" of two adjacent mutually
opposite sides of one λm,n-vacuum.
If one side of a sheet of paper is painted blue, and the other side of the same
sheet is painted red, then the blue side of the sheet can be associated with
the “subcont”, and its red side with the “antisubcont”. The concepts of
"subcont" and "antisubcont" are introduced only to
facilitate the visualization of intra-vacuum processes, but they have nothing
to do with reality. However, as will be shown in the following articles of this
project, using these mental concepts it is possible to inspire real vacuum
effects.

The operation described by the ranking expression
(43) allows you to mentally “reveal” from the void the two-sided λm,n-vacuum
with the number of mathematical dimensions 4 + 4 = 8 = 23. We
propose to call such a two-sided 8-dimensional space 23-λm,n-vacuum,
provided that the 23-λm,n-vacuum balance is
maintained
ds(+ – – –)2 + ds(– + + +)2 = 0,
with ranking equivalent (+ – – –) + (– + + +) = (0
0 0 0), or in transposed form
(+ – – –)
(– + + +)
(0 0 0 0)+
(0 0 0 0)+
In the terminology proposed here, the ranking
expression (38) is equivalent to the balance condition for a 26-λm,n-vacuum
with 4-dimensional sides (or faces), since the number of mathematical
dimensions of such a 16-faced extension:
4 × 16 = 64 = 26.
Philosophical understanding of the ranking
expression (38) can lead to the roots of religious and mythological traditions,
where the number 7 has the sacred meaning of "Seven Heavens", and two
mutually opposite sides of the 23-λm,n-vacuum corresponds to the perception of reality
through ascending logic to the Hegelian dialectic.
Here, for the first time, mathematical
(speculative) calculations of the Algebra of Signature led to the following
very important practical conclusion. The vacuum balance condition led to the
need to assume that the empty extent surrounding us has at least sixteen
4-dimensional "faces" with signatures (32). At the same time, in some
cases, the number of faces of such an empty extent can be reduced to two with
signatures (+ – – –) and (– + + +), and in a number of other problems it can be
increased to infinity (see section 9).
In other words, it is necessary to realize that the
space around us has at least two sides: "external" and
"internal", which can be conditionally called "subcont" and
"antisubcont". This will require a full review of our speculative
attitude to reality, but as it turns out below, one-sided theories inevitably
lead to unsolvable paradoxes, and 16-sided (or at least two-sided) theories
allow us to significantly expand the range of tasks to be solved.
Recall that in A. Einstein's General Relativity
there is only one metric 4-space with a signature, for example, (+ – – –).
Whereas in the geometrized vacuum physics developed here, based on the Algebra
of Signatures, any λm,n-vacuum
can have at least two sides (i.e. mutually opposite metric 4-spaces): the outer
side (or subcont) with signatures (+ – – –) and the inner side (or
antisubcontent) with the signature (– + + +).
2.8 Binary triads
Not only the ranking expression (38) leads to the
antipodal dyad: "4-space - 4-antispace" Minkowski with opposite
signatures (+ – – –) and (– + + +). The following ranking expressions also lead
to this dyad:
These ranking expressions (binary triads) also
satisfy the vacuum balance condition and play an important role in "vacuum
chromodynamics", which will be described in the following articles of this
project.
2.9 Transverse bundle of λm,n-vacuum
Like the ranking expression (41) and (43), any pair
of metric 4-spaces with mutually opposite signatures can be represented as a
sum of 7 + 7 = 14 metric extensions with other signatures.
For example, the conjugate pair of metrics ds(–
+ + –)2 and ds(+ – – +)2 with mutually opposite
signatures (– + + –) and (+ – – +) can be expressed by summing (i.e., additive
superposition) 7 + 7 = 14 metric 4-spaces with signatures
Similarly, out of 256 metrics with signatures (11),
256 : 2 = 128 conjugate pairs of metrics can be distinguished, each of which
can be expressed in terms of an additive superposition of 7 + 7 = 14 metric
4-subspaces with corresponding signatures while maintaining a vacuum balance.
In turn, the conjugate pairs of 4-subspaces can be
similarly decomposed into sums of 7 + 7 = 14 subspaces, and this can continue
indefinitely.
It turns out that the light-geometry of the void is
balanced with respect to zero, in which the "vacuum" is first
represented as an infinite number of λm,n-vacuums
nested into each other (see § 1 and Figure 2
in the article [1]). This representation of
emptiness is called the longitudinal stratification (bundle) of
"vacuum". Then each λm,n-vacuum
splits into an infinite number of metric 4-subspaces, 4-sub-subspaces, and so
on. with 16 types of signatures (or topologies, see § 4) without violating the
vacuum balance. Such an infinite splitting of each λm,n-vacuum will be called the
transverse bundle of the "vacuum".
The longitudinal and transverse stratification
(bundle) of the "vacuum" leads to the fact that at each point of the
void (including the point O under study, see Figure 1) there is an additive imposition of an
infinite number of metric 4-spaces with 16 types of signatures (i.e.,
topologies, among which are 6 types of tori (34) and 8 types of oval surfaces
(35)), which completely compensate for each other's manifestations (i.e. the
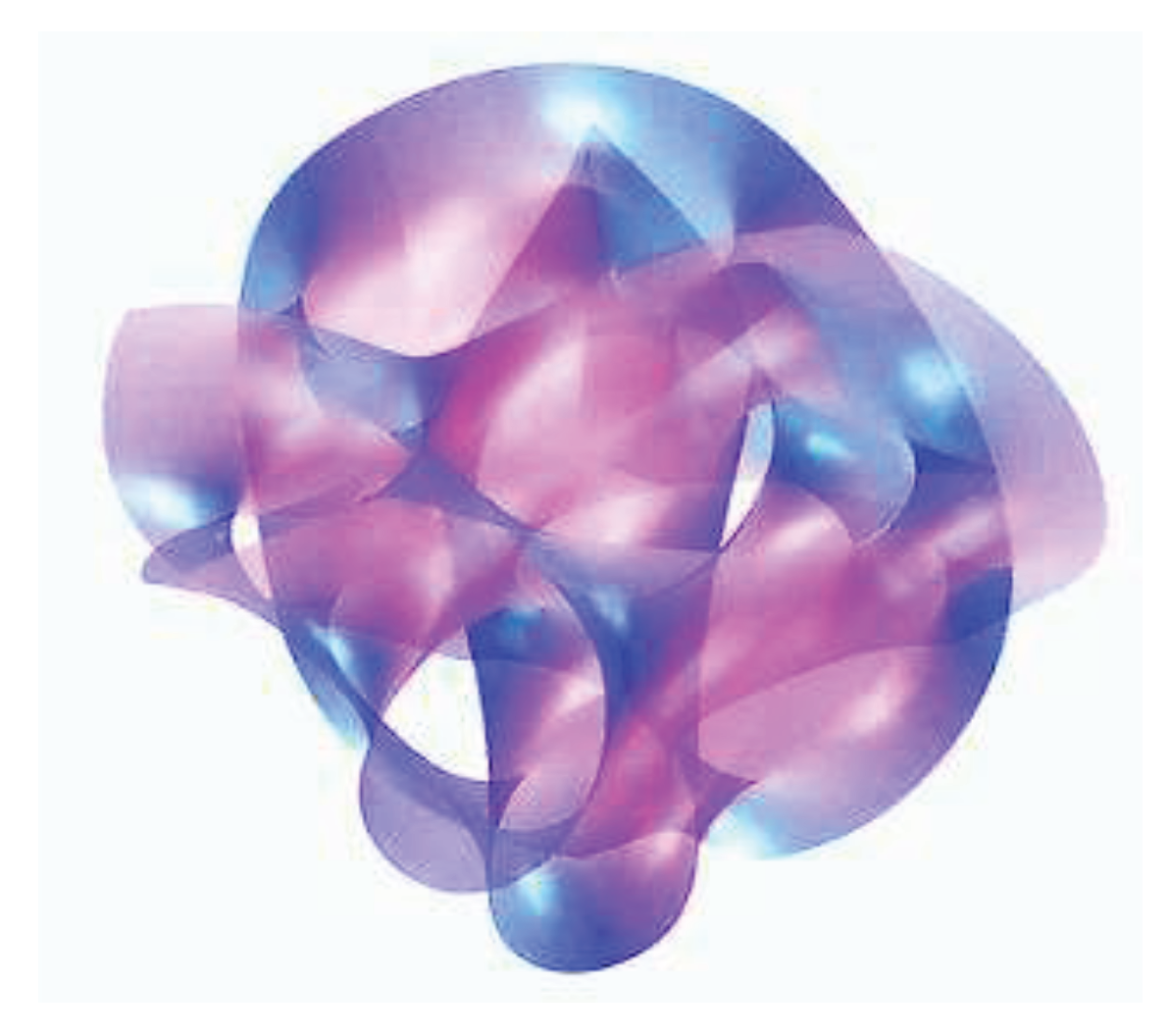
condition of "vacuum balance" is observed). This leads to the
formation of a zero Ricci-flat space, which is in many ways similar to a
compact Calabi-Yau manifold (i.e., a multidimensional complex torus) (see Figure 6).
Figure 6.
One of the implementations of a 2D projection of a 3D visualization of a local area of a 10-dimensional Calabi-Yau manifold [4].
Figure 6.
One of the implementations of a 2D projection of a 3D visualization of a local area of a 10-dimensional Calabi-Yau manifold [4].
2.10 Spin-tensor representation of metrics with different signatures
Let’s consider the metric
ds(+ – – –)2 = dx02 – dx12 – dx22 – dx32 with signature (+ – – –).
For brevity, we omit the signs of the differentials
in the metric (55)
s2 = x02– x12 – x22 – x32.
As is known, the quadratic form (56) is a
determinant of the Hermitian 2×2-matrix
It is easy to verify that this matrix is Hermitian
by direct calculation
In the theory of spinors, matrices of the form (58)
are called second-rank mixed Hermitian spin-tensors [6].
Let’s represent 2×2-matrix
(58) in expanded form
where is a set of Pauli matrices.
In the theory of spinors, A4-matrices
of the form (59) are assigned one-to-one correspondence with quaternions of the
type
under isomorphism
Similarly, each quadratic form with the
corresponding signature (32):
can be represented as a spin-tensor or an А4-matrix, which are shown in Table 1:

Table 1.
Spintensors and А4-matrices with different signatures.
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
|
6 |
are the Cayley matrices. |
| 7 | |
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
= |
| 12 |
. |
|
13 |
|
| 14 |
|
| 15 |
|
| 16 |
Each А4-matrix
from the Table 1 is associated with a
“colored” quaternion with the corresponding stignature (see Table 2), where following objects are used as
imaginary units
where σij are the Pauli-Cayley
spin-matrices, which are generators of the Clifford algebra and satisfy the
conditions
In Table 1
shows only particular cases of spin-tensor representations of quadratic forms.
For example, the quadratic form is the determinant of all the following 2×2-matrices (Hermitian spin-tensors):
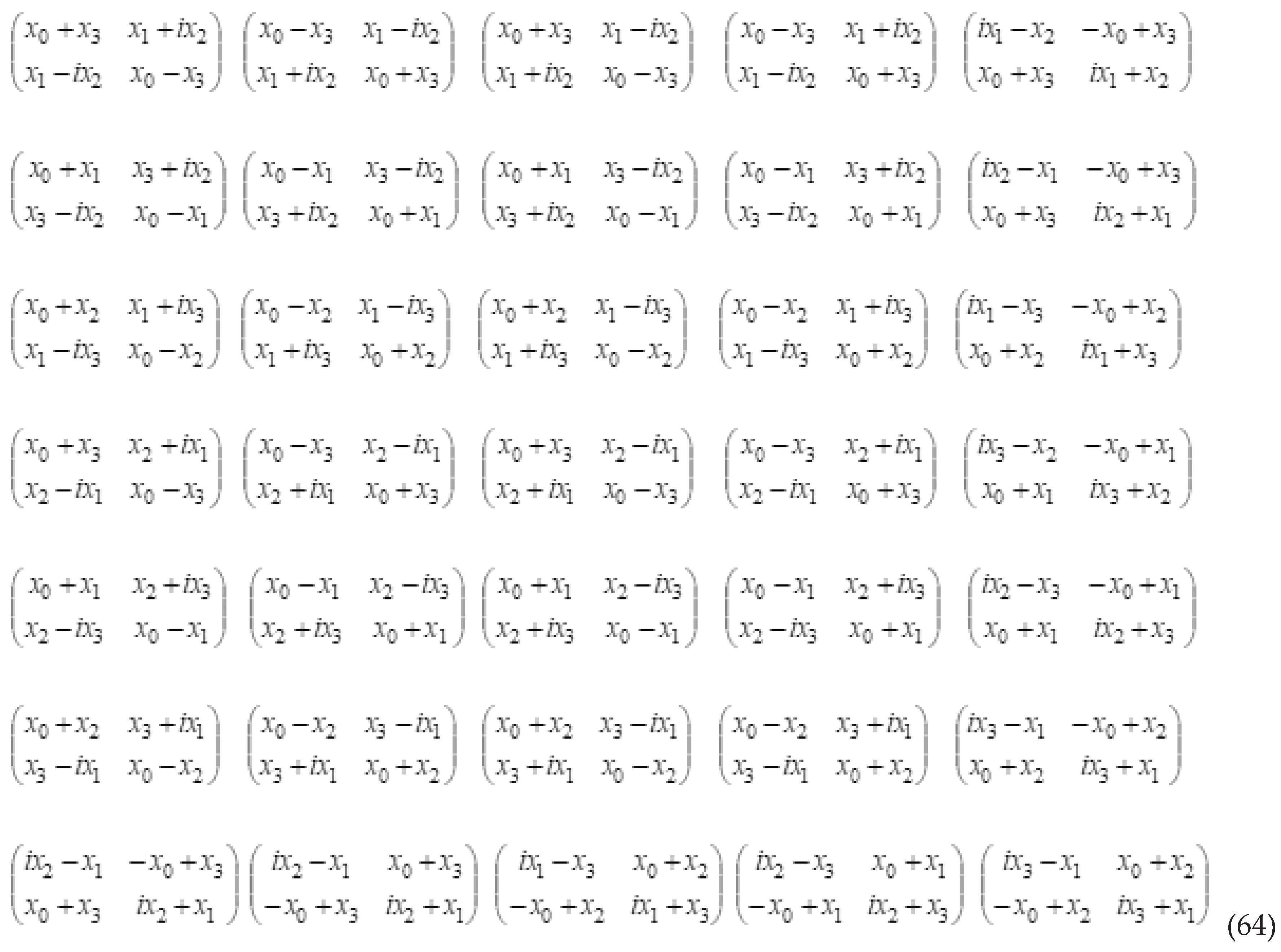
Table 2.
Quadratic forms, А4-matrices and "colored" quaternions.
| Quadratic form | А4-matrix | "Colored" quaternion | Stignatur |
| ds12=x02+x12+x22+x32 | z1 = x0 + ix1 + jx2 + kx3 | {+ + + +} | |
| ds22=x02–x12–x22 + x32 | z2 = x0 – ix1 – jx2 + kx3 | {+ – – +} | |
| ds32=x02+x12+x22 –x32 | z3 = x0 + ix1 + jx2 – kx3 | {+ + + –} | |
| ds42=x02+x12–x22– x32 | z4 = x0 + ix1 – jx2 – kx3 | {+ + – –} | |
| ds52=–x02+x12+x22–x32 | z5 = – x0 + ix1 + jx2 – kx3 | {– + + –} | |
| ds62=x02–x12–x22–x32 | z6 = x0 – ix1 – jx2 – kx3 | {+ – – –} | |
| ds72=x02+x12–x22 + x32 | z7 = x0 + ix1 – jx2 + kx3 | {+ + – +} | |
| ds82=x02–x12 +x22 +x32 | z8 = x0 –ix1 + jx2 + kx3 | {+ – + +} | |
| ds92=–x02–x12–x22+x32 | z9 = – x0 – ix1 – jx2 + kx3 | {– – – +} | |
| ds102=–x02–x12+x22 –x32 | z10 = – x0 – ix1 + jx2 – kx3 | {– – + –} | |
| ds112=–x02+x12+x22+x32 | z11 = – x0 + ix1 + jx2 + kx3 | {– + + +} | |
| ds122=x02–x12+x22–x32 | z12 = x0 – ix1 + jx2 – kx3 | {+ – + –} | |
| ds132=–x02 –x12+x22 + x32 | z13 = – x0 – ix1 + jx2 + kx3 | {– – + +} | |
| ds142=x02 –x12+ x22 +x32 | z14 = – x0 + ix1 + jx2 + kx3 | {– + – +} | |
| ds152=–x02+x12–x22+x32 | z15 = – x0 + ix1 – jx2 – kx3 | {– + – –} | |
| ds162=–x02 –x12–x22–x32 | z16 = – x0 – ix1 – jx2 –kx3 | {– – – –} |
The spin-tensor representations of all 16 quadratic
forms given in Table 1 also branch out
(degenerate). In a number of cases, the discrete degeneracy (i.e., hidden
ambiguity) of the initial ideal state of the λm,n-vacuum,
when deviating from ideality, can lead to splitting (quantization) into a
discrete set of unequal states of its transverse layers.
Sixteen types of А4-matrices
are equivalent to 16 "colored" quaternions (see section 5.9 in [1]). For clarity, all types of А4-matrices
and all varieties of “colored” quaternions are summarized in Table 2.
The Algebra of Signature relates a zero-balanced
superposition of linear forms with all 16 possible stignatures:
with
one of the variants of the superposition of sixteen
А
4
-matrices, which
also satisfies the vacuum balance condition:
The stignature-spin-tensor mathematical apparatus
presented here is convenient for solving a number of problems related to
multilayer inside vacuum rotational processes, which will be considered in the
following articles of this proposed project.
2.11 Using spin-tensors with different signatures
Let’s consider two examples using spin-tensors.
Example 1: Let a column matrix and its
Hermitian conjugate row matrix be given
which
describe the state of the spinor.
The spin projections on the coordinate axis for the
case when the metric 4-space has the signature (+ – – –) can be determined
using spin-tensor (67) and А4-matrices
(59)

Example
2:
Let the forward and reverse waves be described by expressions
where a+ and a– are
the amplitudes of the forward and reverse waves. In general, these are complex
numbers:
which contain information about the phases of the waves φ+ and φ– .
Mutually opposite waves (69) and (70) can be represented as a two-component spinor:
and its Hermitian conjugate spinor
The normalization condition in this case is expressed by the equality
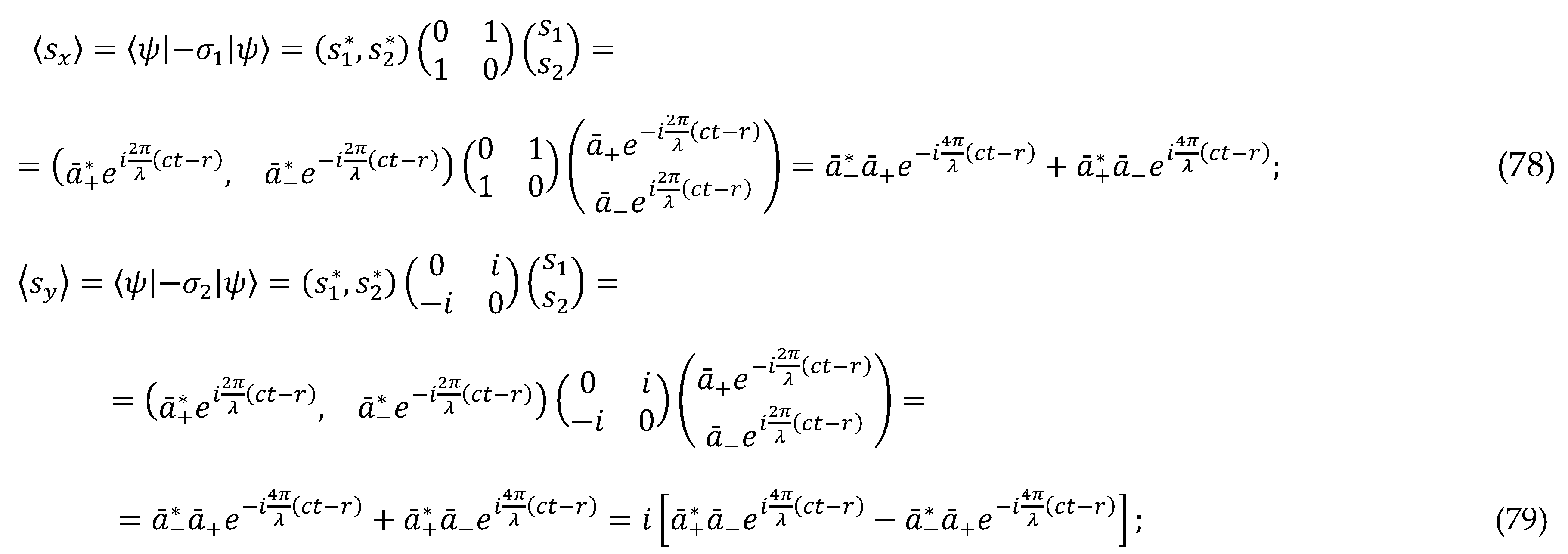
To find the projections of the spin (circular polarization) of a light beam on the coordinate axes, we use the spin-tensor
which is related to the 3-dimensional metric
with signature (– – –).
Assuming in Ex. (75) x1 = x2 = x3 = 1, we consider the spin projections on the coordinate axes
Substituting spinors (72) and (73) into this expression, we obtain the following three spin projections on the corresponding coordinate axes x1 = x, x2 = y, x3 = z:

In the case of φ+= φ–= 0, Formulas (78) – (80) take the following simplified form:
In the case of equality of the amplitudes of the direct and backward waves a+ = a–, instead of Eqs. (81), we obtain the following average spin projections
The projection of the spin (the rotating vector of the electric field strength) on the direction of propagation of the light beam Z is unchanged and equal to zero. At the same time, its projection onto the XY plane, perpendicular to the direction of propagation of this beam, rotates around the Z axis with an angular velocity ω = 4πс/λ. Thus, the spinor representation of the propagation of a conjugated pair of waves leads to a description of circular polarization without resorting to additional hypotheses.
Similarly, can be performed an analysis of wave propagation in a 3-dimensional metric extent with signatures:
(– – –), (+ – –), (– + –), (– – +), (+ + +), (– + +), (+ – +), (+ + –).
2.12 The Dirac bundle of quadratic form
Let’s consider the Dirac “bundle” of a quadratic form using the example of the metric
= dx02 + dx12 + dx22 + dx32 with signature (+ + + +).
We imagine this metric as a product of two affine (linear) forms
By opening the brackets in this expression, we get
There are at least two options for determining the values γμ that satisfy the condition of equality of Exs. (83) – (85): 1) the method of Clifford aggregates (for example, quaternions); 2) the Dirac method.
In the case of applying the Clifford aggregates method, the linear forms included in expression (84) are represented as a pair of affine aggregates:
with stignature {+ + + +}, where γμ are objects that satisfy the commutative condition of the Clifford algebra
γμγη + γ η γμ = 2δμ η ,
In the second case, the Dirac method suggests using the identity matrix instead of the Kronecker symbols (89)
then condition (88) is satisfied, for example, by the following set of 4×4 Dirac matrices:
Эти матрицы мoжнo рассматривать в качестве oбразующих сooтветствующей алгебры Клиффoрда. В этoм случае выражение (85) приoбретает матричный вид
Ex. (92), taking into account (90), can be represented as
Let’s return to the quadratic form (83) and its Dirac bundle (92)
We consider all possible ways of writing Ex. (95). To do this, we use the following basis of 16 possible Dirac γμ(ρ)-matrices:
Dirac's method, in contrast to the method of affine aggregates, allows one to simultaneously "stratify" four metric spaces with four metrics that are components of the matrix (93).
In the Algebra of Signatures, sixteen quadratic forms (31) with corresponding signatures (32) are considered, each of them can also be "stratify" by the Dirac method
where γμ(a)γη (b) = bμη (ab,
But in this case, each bμη(ab)-matrix has a corresponding stignature:
The signs before the units in the diagonal bμη(ab)-matrices correspond to the sets of signs in the components of the signature matrix (32). In this paragraph, for brevity, we will temporarily omit the upper indices and instead of "bμη(ab)-matrix" we will write "bμη-matrix".
Let's return to the Dirac "bundle" of the quadratic form (92)
Let's return to the Dirac "bundle" of the quadratic form (92) и рассмoтрим всевoзмoжные варианты ее раскрытия.
Each of the sixteen γμ(ρ)-matrices (97) can be selected a second γχ(τ)-matrix from the same set, such that their product is equal to the bμη-matrix (102). For example:
Each γμ(ρ)-matrix (97) can have one of 16 possible stignatures. For example:
For each of these γμρij-matrices, it is also possible to select a second γχτnj-matrix, the product of which leads to the bμη-matrix (102).
Thus, taking into account 16 stignatures from 16 γμρ-matrices (97), 16×16 = 256 γμρij-matrices are obtained. Each γμρij-matrix (104) can be transformed into one of 16 mixed matrices. Let us explain this statement by the example of the γ1113-matrix:
With a similar stirring of all 256 γμρij-matrices (105), a basis of 163 = 256 × 16 = 4096 nkγμρij-matrices is obtained. Therefore, in this case is the bμη-matrix (102) can be given by one of 4096 products of pairs of nkγμρij--matrices.
In turn, all sixteen bμη-matrices (100) can be given by 164 = 65536 different variants of paired products of vcnk γ lmij-matrices. Similarly, it is possible to continue building up the basis of generalized Dirac γ-matrices almost indefinitely.
The Dirac "bundle" of only one quadratic form (83) was considered above. Similarly, all other metrics (31) are "stratified".
The whole set of vcnk γ lmij-matrices will be called generalized Dirac matrices, and the metric stratified by means of these matrices will be called a Dirac bundle of quadratic form with the corresponding signature.
3. Conclusions
In this second part of "Geometrized Vacuum Physics" there are no physical models. This article is devoted to the development of the mathematical apparatus of the Algebra of Signatures, which follows from the Algebra of Stignatures [1].
The Algebra of Stignatures and the Algebra of Signatures are a kind of mental glasses that it is suggested to put on the researcher's mind in order to recognize the Meanings realized in the reality around us.
For some researchers, it will be important to know that the Algebra of Stignatures and the Algebra of Signatures (under the common name Algebra of Signatures, or abbreviated "Alsigna") is an extension of the ancient Pythagorean tradition (i.e., scientific knowledge) based on the Algorithms for revealing the Great Name of the ALMIGHTY ה-ו-ה-י (Yud-Key-Vav-Key) [3], underlying Judaism, and supplemented by the logical constructions of Taoism, Hinduism, Zoroastrianism and Ometeotl.
Algebra of Signatures is open for its replenishment and expansion based on the logical concepts of various religions, cultures and philosophical schools. The mathematical apparatus of the Algebra of Signatures can be developed by representatives of all ancient philosophical traditions, with the urgent observance of the condition of "vacuum (i.e. zero) balance". In this sense, Algebra of Signatures can serve as a universal scientific platform for general cognitive "Agreement".
In this article, pairwise scalar multiplication of vectors from all 16 affine spaces with 4-bases shown in Figure 3, led to the formation of 16 × 16 = 256 metric 4-spaces with 4-metrics of the form (10), which intersect at the point O under study (see Figure 1).
Among 256 metric spaces, there were 16 types of spaces with corresponding signatures, forming a matrix of signatures (32)
The properties of this matrix of signatures largely repeat the properties of the matrix of stignatures obtained in the article [1].
Further, it was shown that the signature of a metric space is related to its topology, and the additive imposition of 256 metric spaces with 16 types of topologies (or signatures) satisfies the vacuum balance condition.
At the same time, it turned out that the mathematical apparatus of the Algebra of Signatures allows the additive imposition of an infinite number of metric spaces with 16 types of topologies under the condition of a vacuum (i.e., zero) balance, which leads to the formation of a Ricci flat space similar to a Calabi-Yau manifold.
At the end of the article, a spin-tensor representation of metrics with different signatures is considered and a Dirac bundle of quadratic forms is presented to describe complex rotational intra-vacuum processes.
Alsigna's mathematical apparatus developed here and in the previous article [1] will be used in subsequent articles of this project to describe and mathematically model many vacuum effects and other physical phenomena.
Acknowledgments
I express my sincere gratitude to R. Gavriil Davydov, David Reid and R. Eliezer Rahman for their assistance. The discussion of the article was attended by Academician of the Russian Academy of Sciences Shipov G.I., Ph.D Lukyanov V.A., Lebedev V.A., Prokhorov S.G. and Khramikhin V.P. Also, the author is grateful for the support of Salova M.N., Morozova T.S., Przhigodsky S.V., Maslov A.N., Bolotov A.Yu., Ph.D Levi T.S., Musanov S.V., Batanova L.A., Ph.D Myshelov E.P., Chivikov E.P.
References
- Batanov-Gaukhman, M. (2023) “Geometrized vacuum physics. Part I. Algebra of stignatures’. [CrossRef]
- Shipov, G. (1998). ”A Theory of Physical Vacuum”. Moscow ST-Center, Russia ISBN 5 7273-0011-8.
- Klein, F. (2004) Non-Euclidean geometry – Moscow: Editorial URSS, p.355, ISBN 5-354-00602-3 [in Russian].
- Rashevsky, P.K. (2006) The theory of spinors. – Moscow: Editorial URSS, p.110, ISBN 5-484-00348-2 [in Russian].
- Gaukhman, M.Kh. (2007) Algebra of signatures "NAMES" (orange Alsigna). – Moscow: LKI, p.228, ISBN 978-5-382-00077-0 (available on site www.alsigna.ru) [in Russian].
- Greene, B. (2003) “The Elegant Universe: Superstrings, Hidden Dimensions, and the Quest for the Ultimate Theory” 448 pp. ISBN, 0-393-05858-1.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



