Submitted:
09 April 2023
Posted:
11 April 2023
Read the latest preprint version here
Abstract
We define a spinor-Minkowski metric for SL(4,C). It is not a trivial generalization of the SL(2,C) metric and it involves the Minkowski metric. We define 4x4 version of the Pauli matrices and their 4-component generalized eigenvectors. The generalized eigenvectors can be regarded as 4-component spinors and they can be grouped into four categories. Each category transforms in its own way. The outer products of pairwise combinations of 4-component spinors can be associated with 4-vectors.
Keywords:
Lie Algebra
; Particle Physics
; quantum mechanics
1. Introduction
Let be an element of . In an exponential form with parameters and :
is the Pauli vector with . The subscript is introduced in order to distinguish the other forms of L that will be introduced subsequently.
We rewrite and its complex conjugate in the following compact forms:
and denotes complex conjugation. corresponds to the Lorentz transformation with and being the rotation and boost parameters, respectively.
It is well known that the complex version of the Lorentz transformation matrix can be written as a matrix direct product of and :
In order to obtain the familiar real matrix form of the Lorentz transformation it is enough to change the basis:
where
Now, it is straightforward to show that can be written as a commutative product of and by simply rewriting Eq.(4) in a factorized form:
and are the versions of and matrices. They can be expressed in terms of matrices:
and are versions of Pauli matrices:
These are traceless Hermitian matrices and they satisfy the same commutation relations as matrices
By definition, , , is the identity. basis do not form a complete set for matrices, but the set of does.
From the Eq.(7), can be found in terms of the elements of :
where ,,, and . Hence, can be written in terms of as
We can write and in terms of and matrices:
Or, simply
We also define the spinor metric g for that corresponds to the spinor metric of :
is the mostly minus Minkowski metric1.
preserves the Minkowski metric:
Since is real, directly entails . In an analogy with , we have the following very useful relation:
In this note we will show that there are eight generalized eigenvectors of matrix that can be interpreted as 4-component covariant spinors. The generalized eigenvectors can be pairwise grouped into four categories. The first pair transforms in the usual way, but the other three transform in different ways.
In the following we will study the first and the second pairs in detail, and we will introduce the remaining two in the subsequent sections.
2. The First and the Second Pairs and Their Transformation Properties
Let be the representation of the Lorentz group that acts on the 2-component left-chiral spinor :
where
In terms of the components of :
Let us call this transformation scheme .
Let be the dotted version corresponding to the representation of the Lorentz group. . Let be the 2-component right-chiral spinor. , where
transforms as
What happens when acts on ? In this case, in terms of the components
Let us call this transformation scheme . We can write in a matrix form:
Let us name this transformation matrix as . Note that, , and Eq.(26) is nothing but the transformation of under the action of , which is a type transformation.
Now, let be the representation of that acts on the first pair of the 4-component undotted covariant spinors:
where and are the generalized eigenvectors of 2:
Indices in the parentheses are simply labels for 4-component spinors.
Now consider the second pair of the generalized eigenvectors of :
Transformation scheme of and is different from that of and . Under the action of , and transform according to the scheme , but and transform according to the scheme . However, we may think in an alternative way: Suppose that and are different kind of objects with different transformation properties, such that another transformation matrix, , acts on them and under the action of they transform according to the scheme :
By definition :
Or, simply
Now let be the representation. . We regard the generalized eigenvectors of as 4-component undotted contravariant spinors and we define the first pair as follows:
Under the action of , dotted versions of and transform according to the scheme .
The second pair of the generalized eigenvectors of is defined as
Under the action of , the dotted versions of and transform according to the scheme . But, they transform according to the scheme under the action of :
where by definition. is related to by the metric, , and its dotted version is defined as 3.
We write various forms of Z and L matrices in compact notation to manifest the parallelism between them:
3. Outer Products of 4-Component Spinors and Null 4-Vectors
Let us define the outer product which transforms as
This is a type transformation. Determinant of is zero, hence can be associated with a null 4-vector through the substitutions, :
We also define the outer product which transforms as
This is also a type transformation. Determinant of is zero and can be associated with a null 4-vector:
Note that can be obtained from by parity inversion.
There are outer product forms of 4-component spinors that can be associated with null 4-vectors. and transform in a similar way with :
For and , transform according to the scheme as
This equation is equivalent to the Eq.(40), and it is the main motivation behind the interpretation of as 4-component spinors for .
and transform in a similar way with :
For and , transform according to the scheme as
and are Hermitian and zero determinant matrices, hence they correspond to null 4-vectors.
We also have outer products of 4-component spinors of the other kind. For and , and transform according to the scheme under the action of and :
These are also Hermitian and zero determinant matrices and they correspond to null 4-vectors.
4. Quaternion Forms and 4-Vectors
In general, we can treat and z as variables that do not depend on u and v. Then, we can associate the following matrices and with 4-vectors, which are not necessarily null:
detdet and in general not zero. and transform as
These are matrix representations of quaternions, because matrices have the same properties as the Hamilton’s quaternion basis, :
Similarly,
In order to make the analogy with we consider the following two column objects that are pairwise combinations of 4-component spinors:
where , , , .
We define an outer product of 4-component spinor pair in the form , which is formally a quaternion:
can be written as a sum of two basic forms: . In its present form det and corresponds to a null 4-vector, but we can associate with an arbitrary 4-vector in terms of the variables and z:
and it is the version of :
Similarly, we define :
In terms of the variables and z:
and it is the version of :
can be obtained from by parity inversion and they transform as
These are type transformations, hence these forms correspond to 4-vectors.
The outer product is also a quaternion:
In terms of variables and z:
.
We also write :
and it can be obtained from by parity inversion. and transform with and :
These transformations obey the scheme also, hence they correspond to 4-vectors.
With the compact notation we can show a very nice symmetry: The form of the transformation matrix matches the form of the transformed object. For example, acts on the form , acts on the form , acts on the form , and acts on the form .
5. Two More Pairs of Spinors
There are four eigenvectors of that constitute a complete orthonormal set of basis:
and correspond to eigenvalue and and correspond to eigenvalue. We obtain eight generalized eigenvectors by combining the basis corresponding to the same eigenvalue. For example, we can obtain the four generalized eigenvectors that we have previously studied as follows:
We can obtain four more generalized eigenvectors of by changing the sign or swapping u and v:
Totally we get eight undotted covariant spinors:
We can group () pairwise:
We already know that transforms with and transforms with . Following the same procedure that we have applied in the previous sections we can show that and transform with and respectively:
where
There are also the dotted versions:
We also define the contravariat spinors () that correspond to the generalized eigenvectors of :
We group them pairwise:
Each pair of the dotted contravariant spinors transform with the associated dotted Z matrix.
We define four two-column covariant objects:
And we define the corresponding two-column contravariant objects
Finally, we construct eight outer products that lead to the following quaternions:
Each form transforms in its own way with the matching Z or matrix.
6. Complex Conjugated Forms
Let us write the complex conjugates of the quaternion forms:
Conjugate forms reside in the dual space that spanned by . They don’t have any counterpart in . Dotted lower indexed and undotted upper indexed forms transform with or with matrices respectively and all transformations obey the scheme .
4-vector scalar product can be defined by using the dual forms in two equivalent ways. Let and be two 4-vectors and let and be the corresponding quaternions () :
Or, noting that , we can write also as:
where now indices refer to the components and the summation convention is implied.
In general, in order to get something real we have to use both and . As an example, , is the real Lorentz transformation matrix.
7. Four Types of Transformations for SL(2, C)
We can suggest a similar formalism for . Let and be covariant spinors:
and let and be contravariant spinors:
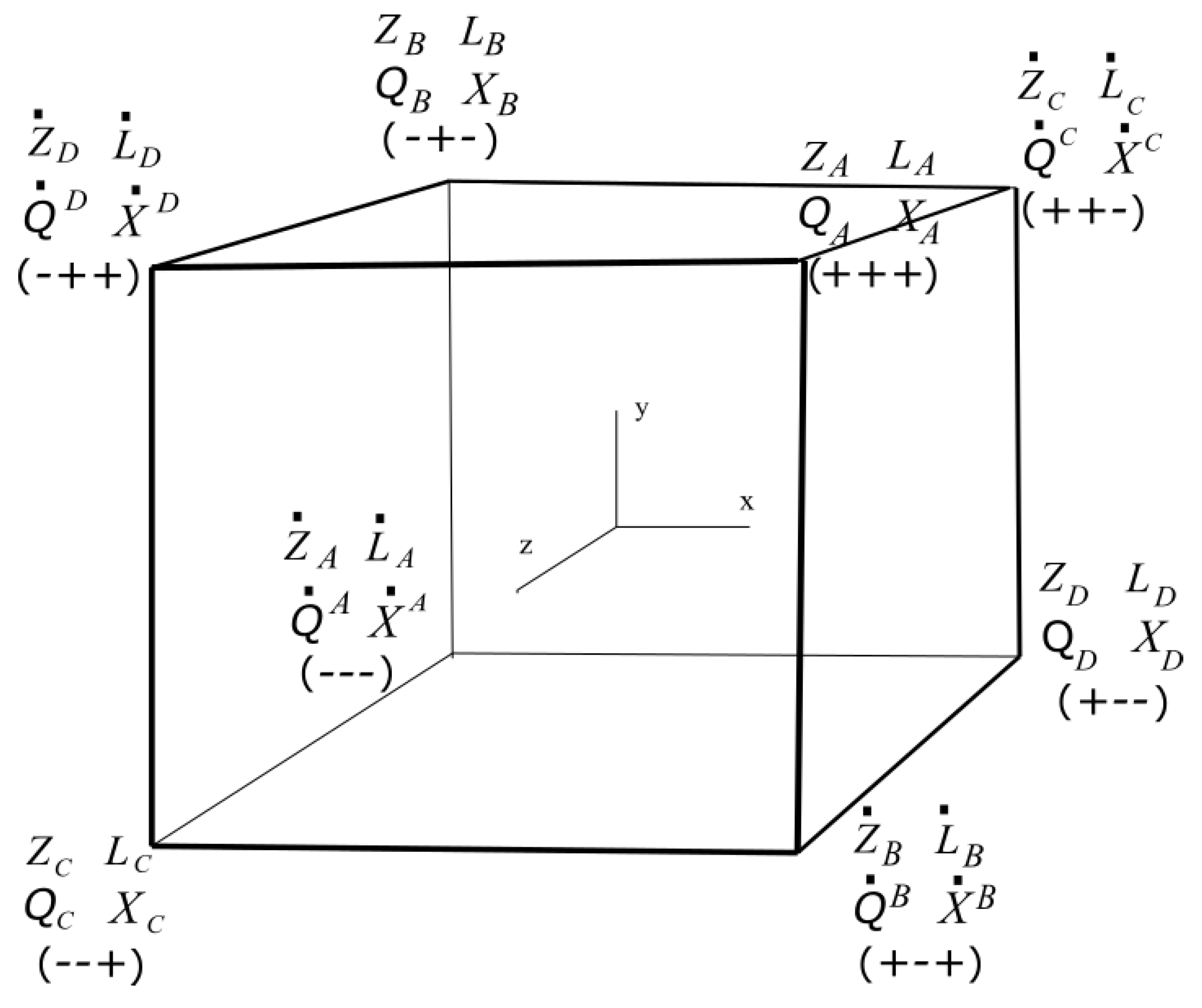
where , , and . This proliferation is necessary for the symmetry in Figure 1.
We have the following transformation properties:
All transformations obey the scheme .
We have the following outer products:
It is worth noting that complex conjugating these forms does not yield anything new.
Appendix A
Appendix A.1. Various Forms of Z and L Matrices
Let us begin with the exponential form , where , . Let be the complex angle defined as . Using the property :
where
Or in a compact form
It is easy to show that
and
where complex conjugation is applied only to .
The corresponding is
In terms of the Pauli matrices:
In order to write we first find , where
From the definition :
Or, simply
We write various forms of Z and L matrices in compact forms:
Although, all types of Z and L matrices are in the same form, there is a very important difference between them. Because of the particular property of the Pauli matrices, , but , we have the following relations:
For example,
On the other hand we do not have a similar property with matrices, hence
.
The structural difference between and becomes more apparent when we write the matrices in exponential forms. In order to do this we have to define two types of : and .
Due to the properties, and , the relations in Eq.(A13) hold. But we do not have similar relations with the matrices.
Appendix A.2. Two Types of Lorentz Transformations
Let and be 2- and 4-component spinors that transform according to the scheme , and let be a 4-vector that can be associated with the outer products and . transforms as
is the usual real Lorentz transformation matrix that corresponds to the scheme :
where . The corresponding elements are
Let be a 4-component spinor that transforms according to the scheme , and let be a 4-vector associated with the outer product . transforms as
where is the real Lorentz transformation matrix that corresponds to the scheme :
. where by definition. The corresponding elements are
In this case, we don’t have a counterpart of in the formalism of .
and preserves the Minkowski norm due to the relations and . Since is real, these relations follow from the following more fundamental relations:
Appendix A.3. The Other Way Around
Suppose that, for or , the eigenvectors of and transform as follows:
We know that these transformations obey the scheme .
Suppose that, for or , the eigenvectors of and are mathematical objects that have different properties than the eigenvectors with indices or . Possibly, they describe physical objects of different kind which transform as
In this case, these transformations will also obey the scheme , and accordingly all null and non-null 4-vectors that correspond to the outer product forms and associated quaternion forms will transform in the usual way, i.e., they transform with .
References
- Han, D.; Kim, Y.S.; Noz, M.E. Polarization optics and bilinear representation of the Lorentz group. Physics Letters A 1996, 219, 26–21. [Google Scholar] [CrossRef]
- K. N. Srinivasa Rao, Linear Algebra and Group Theory for Physicists, Second Edition, Hindustan Book Agency, New Delhi, India.
- Sudha and, A.V. Gopala Rao, "Polarization Elements: A Group Theoretical Study".
- D. Han, Y. S. D. Han, Y. S. Kim, Marilyn E. arXiv:physics/9703032V1[physics.optics] 28 Mar 1997.
- Kuntman, E.; Kuntman, M.A.; Arteaga, O. Vector and matrix states for Mueller matrices of nondepolarizing optical media. J. Opt. Soc. Am. A 2017, 34, 80–86. [Google Scholar] [CrossRef] [PubMed]
- Kuntman, E.; Kuntman, M.A.; Canillas, A.; Arteaga, O. Quaternion algebra for Stokes–Mueller formalism. J. Opt. Soc. Am. A 2019, 36, 492–497. [Google Scholar] [CrossRef] [PubMed]
- Azzam, R.M.A. Propagation of partially polarized light through anisotropic media with or without depolarization: A differential 4 × 4 matrix calculus. J. Opt. Soc. Am. 1978, 68, 1756. [Google Scholar] [CrossRef]
- Barakat, R. Exponential versions of the Jones and Mueller–Jones polarization matrices. J. Opt. Soc. Am. A 1996, 13, 1. [Google Scholar] [CrossRef]
- Cloude, S.R. Group theory and polarization algebra. Optik 1986, 75, 26–36. [Google Scholar]
- Hamilton, W.R. On a new species of imaginary quantities connected with the theory of quaternions. Proceedings of the Royal Irish Academy 1844, 2, 424–434. [Google Scholar]
- Başkal, Sibel and Kim, Young S and Noz, Marilyn E, "Physics of the Lorentz Group," Morgan and Claypool Publishers (2015).
- A.A. Bogush, V.M. A.A. Bogush, V.M. Red’kov, "On unique parametrization of the linear group GL(4.C) and its subgroups by using the Dirac matrix algebra basis," arXiv:hep-th/0607054V1 (2006).
| 1 | We can define the spinor metric for as or if we like. These metrics also have the same properties of g. |
| 2 | We may use the generalized eigenvectors of or matrices as well, but, in that case, we have to employ the other forms of the spinor metric. |
| 3 | The upper dot on a spinorial object simply means complex conjugation: . But, the upper dot on an element of or has a particular meaning. . Similarly, . |
Figure 1.
Reflections and inversions. space is not shown.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



