Submitted:
22 June 2026
Posted:
23 June 2026
You are already at the latest version
Abstract
Unmanned Aerial Vehicles (UAVs) have transitioned from localised applications to complex, long-range missions across civil, commercial, and defence domains. Central to this expansion is the capacity to operate Beyond Visual Line of Sight (BVLOS), an operational paradigm entirely reliant on resilient command and control (C2) data links. This perspective traces the architectural evolution of UAV communication systems, tracking the shift from legacy line-of-sight setups to modern Space-Air-Ground Integrated Networks (SAGIN) and 6G Non-Terrestrial Networks (NTNs). While Low Earth Orbit (LEO) satellite constellations resolve the coverage limits of terrestrial infrastructure, they introduce severe physical bottlenecks: dynamic propagation delays and handover-induced stochastic jitter. This paper evaluates how the field has shifted from basic connectivity validation to latency-aware control systems, highlighting multi-layered, risk-aware autonomous safety architectures that dynamically reconcile network volatility with vehicle safety margins.
Keywords:
UAV
; SATCOM
; BVLOS
; 6G NTN
; SAGIN
; adaptive autonomy
; risk-aware safety
; SORA
1. Introduction
The large-scale deployment of unmanned aerial systems (UAS) across logistics, remote infrastructure monitoring, and disaster response is closely linked to the continued expansion of Beyond Visual Line of Sight (BVLOS) operations. Under modern regulatory frameworks—such as the European Aviation Safety Agency’s (EASA) SORA 2.5 risk assessment methodology [1] and NASA’s Unmanned Aircraft System Traffic Management (UTM) guidelines [2]—a fail-operational, high-availability Command and Control (C2) link is a mandatory prerequisite for airspace integration.
When operating over remote, maritime, or topographically challenging terrains, traditional terrestrial line-of-sight (LOS) radio frequencies and cellular infrastructure (LTE/5G) frequently suffer from geometric shadowing, path loss, and base station scarcity. Consequently, satellite communication (SATCOM) has emerged as a key enabling technology for global BVLOS connectivity, particularly in remote, maritime, and infrastructure-limited environments.
However, integrating SATCOM into high-velocity, safety-critical systems requires a deep understanding of network behaviour. The aerospace community faces a challenging trade-off: balancing wide-area satellite coverage against the control-loop degradation caused by network latency and packet delivery fluctuations. This perspective paper evaluates the historical trajectory of UAV data links, contextualises SATCOM within emerging 6G multi-layered networks, and highlights the algorithmic safety frameworks required to mitigate communication-induced operational risks. Unlike traditional SATCOM surveys that primarily emphasise connectivity performance, this perspective highlights the emerging communication–control–safety continuum, where network behaviour directly influences autonomy, operational risk, and certification pathways for BVLOS operations.
2. The Evolutionary Trajectory of UAV Data Links
The transition of UAV flight control architectures from localised point-to-point systems to highly autonomous, satellite-routed frameworks can be categorised into five distinct developmental generations, as illustrated in Figure 1.
Early research focused primarily on establishing basic link validation for Beyond-Line-of-Sight (BLOS) flight. Foundational evaluations highlighted that compact, vehicle-mounted SATCOM terminals could successfully handle high-bandwidth, real-time data streaming for Intelligence, Surveillance, and Reconnaissance (ISR) applications, payload logistics, and wide-area traffic monitoring [3]. These initial setups bypassed localised geographic obstacles, but they also confirmed that future aerial networks would need to shift from simple connectivity validation to addressing the core challenges of signal delay and control-loop synchronisation [3].
To safely advance beyond basic connectivity, modern UAS design requires a multi-layered technical progression. This path links raw physical infrastructure directly to closed-loop autonomous risk mitigation, which is outlined conceptually in Figure 2.
3. Quantitative Architectural Trade-Offs of UAV Data Links
To fully evaluate modern safety frameworks, it is necessary to contrast the exact physical and operational boundaries of the data link architectures proposed for BVLOS operations. Table 1 provides a quantitative comparison of these prevalent architectures.
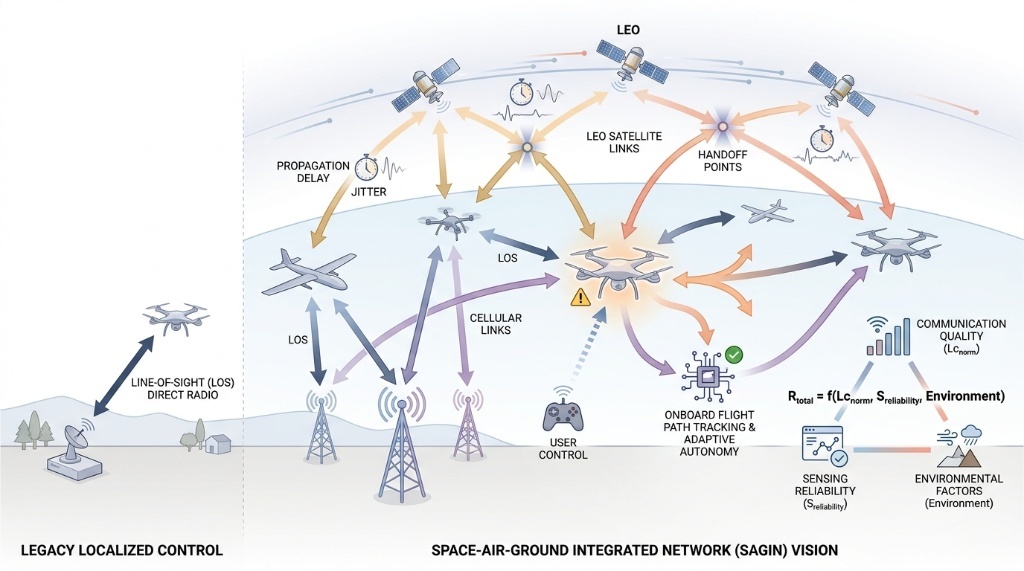
4. 6G Non-Terrestrial Networks (NTN) and Space-Air-Ground Integration
In the current 6G communication era, UAV connectivity is no longer analysed as an isolated satellite-to-ground link. Instead, modern aerospace paradigms place the UAV within a multi-tiered Space-Air-Ground Integrated Network (SAGIN). This network seamlessly blends terrestrial 6G infrastructure with Non-Terrestrial Networks (NTNs) consisting of Geostationary Earth Orbit (GEO) satellites, Medium Earth Orbit (MEO) satellites, Low Earth Orbit (LEO) mega-constellations, and High-Altitude Platform Stations (HAPS) operating in the stratosphere. Figure 3 maps this multi-layered architecture.
As reviewed by the European 6G-NTN Project consortium under the Smart Networks and Services Joint Undertaking (SNS JU) [8], this multi-layered routing model creates highly resilient communication links through dual or hybrid connectivity schemes. If a terrestrial link degrades, traffic can be instantly re-routed through an active NTN node.
However, managing these heterogeneous components requires sophisticated cross-layer protocol adaptation and dynamic spectrum management to prevent inter-system interference. Recent 6G frameworks propose a task-oriented, closed-loop approach where sensing, communication, computing, and control (SC³) are treated as an interconnected, indivisible loop [9]. Within this framework, any change in communication performance directly impacts control capabilities, requiring real-time adjustment of flight parameters [9].
5. Characterising the Latency and Stochastic Jitter Bottleneck
Because communication and control loops are tightly coupled, the distinct delay profiles of different satellite orbits pose serious operational challenges. Traditional GEO systems provide steady, wide-area coverage but have an unalterable round-trip propagation delay due to their altitude. This delay forces human-in-the-loop teleoperation into a slower, “wait-and-see” flight style, which compromises safety during fast, dynamic manoeuvres [4].
To address this, modern operators are deploying LEO satellite constellations (e.g., Starlink), which drastically cut round-trip times down to matching metrics of terrestrial networks. However, empirical field tests show that the high-velocity orbital motion of LEO systems introduces a new problem: packet delivery fluctuations caused by frequent satellite handovers.
This behaviour is modelled mathematically as stochastic network jitter. While traditional network protocols use simple retry methods to handle packet drops, these delays can destabilise real-time control algorithms [10]. To prevent control loop failure, contemporary research uses system-level analytical models to map these latency variations directly to flight safety metrics [11]. By moving past simple, binary connection checks, these models calculate a continuous probability of safety breach, allowing the system to predict and avoid control loss before it happens [11].
6. Algorithmic Mitigation: From Adaptive Autonomy to Risk-Aware AI
To meet stringent SORA 2.5 safety standards and lower both the Ground Risk Class (GRC) and Air Risk Class (ARC) during an active flight profile, the vehicle must be able to autonomously manage its behaviour based on the health of its data link. This is achieved through adaptive autonomy frameworks. Rather than treating an unexpected latency spike or satellite handover failure as an immediate point of failure, the UAV dynamically adjusts its level of autonomy based on real-time link performance metrics [11]. If network delay crosses a safe threshold for human control, the vehicle seamlessly transitions from direct teleoperation to onboard, algorithmic flight path tracking [11].
Several recent studies have explicitly explored communication-aware autonomy, adaptive mission management, and dynamic safety assurance frameworks for BVLOS operations over non-terrestrial networks [12]. One illustrative example is the conceptualization of architectures that incorporate communication latency and sensing reliability into a unified risk assessment process. Such frameworks evaluate communication delays and sensing constraints as shared dependencies within a decision engine:
Equation (1):
This expression is presented conceptually to illustrate the coupling between communication quality, sensing reliability, and operational context, rather than as a standardised risk formulation.
By evaluating a normalised communication latency metric (Lc_norm) alongside sensor reliability coefficients (Sreliability), this approach allows the UAV to systematically expand its structural safety boundaries or modulate its flight velocity to compensate for delayed command updates. This aligns closely with NASA’s developmental goals for the Ground Risk Assessment Service Provider (GRASP) ecosystem [2], which aims to shift pre-flight static safety buffers into real-time, onboard automated safety risk management engines. This integration of communication data directly into the safety and control loops provides a transparent, mathematical baseline that could aid aviation authorities in certifying complex, multi-hazard BVLOS missions within low-altitude airspaces.
7. Conclusion
The role of SATCOM in unmanned aviation has evolved from a basic long-range communication link into a highly integrated, safety-critical discipline. While early work focused on proving that satellite links could support long-range missions, modern 6G space-air-ground networks require a much deeper, system-level approach. Today, managing LEO satellite handovers and network jitter is just as critical for flight safety as managing aerodynamic forces. Future research must focus on refining these link-adaptive control algorithms and establishing unified, multi-layered safety architectures. Ultimately, the next generation of BVLOS aviation may be defined less by the availability of connectivity itself and more by the ability of autonomous systems to understand, predict, and safely adapt to communication uncertainty.
References
- European Union Aviation Safety Agency (EASA). ED Decision 2025/018/R: Incorporation of the Specific Operations Risk Assessment (SORA) version 2.5 into EU UAS regulation. EASA Official Publication. 2025. Available online: https://www.easa.europa.eu/en/domains/drones-air-mobility/operating-drone/specific-category-civil-drones/specific-operations-risk-assessment-sora.
- Ancel, E.; Woodward, S. Risk Assessment for Unmanned Aircraft Systems (UAS). NASA Langley Research Center — Aeronautics Systems Analysis Branch (ASAB), 2026. Available online: https://www.nasa.gov/risk-assessment-for-unmanned-aircraft-systems-uas/.
- Barua, Nick. SATCOM, The Future UAV Communication Link; 16 March 2022. [Google Scholar] [CrossRef]
- Zhong, C.; Zhao, Z.; Luo, C.; Cenk Gursoy, M.; Qiu, Q.; Caicedo, C.; Basti, F.; Solomon, A. A Cost-Benefit Analysis to Achieve Command and Control (C2) Link Connectivity for Beyond Visual Line of Sight (BVLOS) Operations. In 2020 Integrated Communications Navigation and Surveillance Conference (ICNS); 2020; pp. 1–10. [Google Scholar] [CrossRef]
- Politi, E.; Purucker, P.; Larsen, M.; Reis, R.; Rajan, R.; Penna, S.; Boer, J. F.; Rodosthenous, P.; Dimitrakopoulos, G.; Varlamis, I.; Höß, A. Enabling Technologies for the Navigation and Communication of UAS Operating in the Context of BVLOS. Electronics 2024, 13(2), 340. [Google Scholar] [CrossRef]
- Gao, M.; Zhang, Y. UAV Communication in Space–Air–Ground Integrated Networks (SAGINs): Technologies, Applications, and Challenges. Drones 2025, 9(2), 108. [Google Scholar] [CrossRef]
- Wang, S.; Ghoshal, M.; Feng, Y.; Khan, I.; Dinh, P.; Basit, O.; Yu, Z.; Hu, Y. C.; Koutsonikolas, D. A Vertical Look at UAV Connectivity in the Wild: Cellular vs. Starlink, 3D Characterization, and Performance Prediction. arXiv. 2025. Available online: https://arxiv.org/html/2605.27755.
- Smart Networks and Services Joint Undertaking (SNS JU). 6G-NTN Consortium Concludes Final Project Review; European Commission Enablers for 6G Networks, 2026; Available online: https://6g-ntn.eu/.
- Fang, X.; Feng, W.; Chen, Y.; Ge, N.; Jin, S.; Mao, S. 6G Space–Air–Ground Integrated Networks for Unmanned Operations: Closed-Loop Model and Task-Oriented Approach. Engineering 2026, 56(1), 79–86. [Google Scholar] [CrossRef]
- Zhou, E.; Kobayashi, M.; Fujihashi, T.; Alim, M. A.; Saruwatari, S.; Nishi, M.; Watanabe, T. A Reliable Multicast Protocol for Streaming Services in Non-Terrestrial Networks. IEEE Access 2024, 12, 176210–176231. [Google Scholar] [CrossRef]
- Barua, N. Latency-Constrained UAV Operations over SATCOM: A System-Level Analytical Framework Incorporating Stochastic Jitter Modelling, Adaptive Autonomy, and Regulatory Consolidation. Preprints.org. 2026b. [Google Scholar] [CrossRef]
- Gebauer, T.; Weißberg, F.; Wietfeld, C. COMPASS: Communication-aware Trajectory Planning for UAV-based Rescue Missions via Non-Terrestrial Networks. 2024 IEEE 99th Vehicular Technology Conference (VTC2024-Spring), 2024; pp. 1–6. [Google Scholar] [CrossRef]
Figure 1.
The evolutionary generations of UAV Command and Control (C2) communication architectures.

Figure 2.
Generalised system-level progression required for safe, certified BVLOS flight operations.
Figure 2.
Generalised system-level progression required for safe, certified BVLOS flight operations.

Figure 3.
Multi-layered architecture of Space-Air-Ground Integrated Networks (SAGIN).


Table 1.
Quantitative Comparison of UAV Communication Architectures.
|
Data Link Architecture |
Operational Coverage Range |
Typical RTT |
Throughput Range |
Primary Technical Bottleneck |
| RF Line-of-Sight (LOS) | Very Low (< 50 km) |
Ultra-Low (< 5 ms) |
1 – 15 Mbps | Geometric shadowing; radio horizon limits. |
| Cellular (LTE / 5G) | Regional (Urban/Suburban) |
Low (10 – 40 ms) |
10 – 100+ Mbps | Uplink antenna nulls at altitude; high handover drops. |
| GEO SATCOM | Global (excl. poles) |
High (480 – 800 ms) |
256 kbps – 2 Mbps | Irreducible propagation latency; limits dynamic control. |
| LEO SATCOM | Ubiquitous Global | Low (25 – 60 ms) |
5 – 50 Mbps | Doppler shifts; handover packet loss. |
| SAGIN / 6G NTN | Ubiquitous 3D | Dynamic (10 – 80 ms) |
Adaptive Multi-Gbps | Cross-layer routing overhead; orchestration complexity. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



