Submitted:
15 June 2026
Posted:
16 June 2026
You are already at the latest version
Abstract
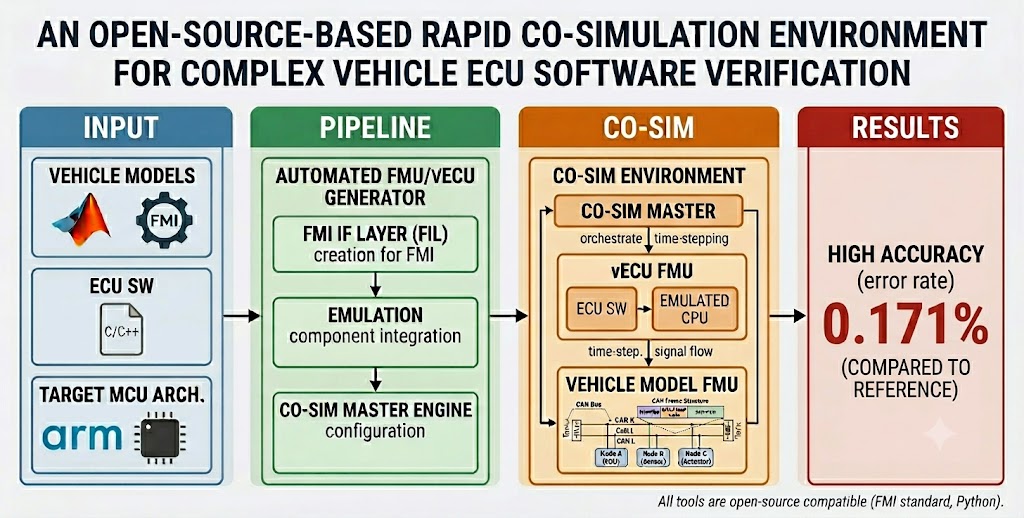
The increasing complexity of automotive software driven by ADAS and autonomous driving has intensified the need for time-deterministic network validation beyond CAN/LIN, while HIL integration remains constrained by limited ECU prototypes and labor-intensive manual configuration. This paper presents a network-oriented virtual verification environment that couples Renode-based virtual ECUs (vECUs) with FMU-based Interaction Layer (FIL) Nodes automatically generated from DBC specifications. The vECUs provide instruction-accurate execution of unmodified target binaries without physical hardware, while the generated FIL Nodes encapsulate communication behavior as model-based FMUs to maintain continuity from MIL to SIL without manual signal mapping. The proposed framework constructs virtual CAN networks from communication-definition files, reproduces periodic and event-triggered traffic patterns, and supports synchronized multi-ECU co-simulation under master-controlled time stepping. Experimental results show that the vHIL environment reproduces physical ECU timing behavior with a maximum relative error of 0.086%–0.171% across all evaluated step sizes (10 μs to 1000 μs), confirming binary-level timing fidelity. Replacing vECUs with FIL Nodes for network communication processing significantly reduces wall-clock execution time in multi-node configurations, demonstrating improved scalability without sacrificing determinism. These results demonstrate that the proposed methodology effectively reduces early-stage integration bottlenecks while preserving timing fidelity for automotive networked ECU validation.
Keywords:
vECU
; vHIL
; Renode
; AUTOSAR
; CAN
; IVN
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



