Submitted:
28 April 2026
Posted:
29 April 2026
You are already at the latest version
Abstract
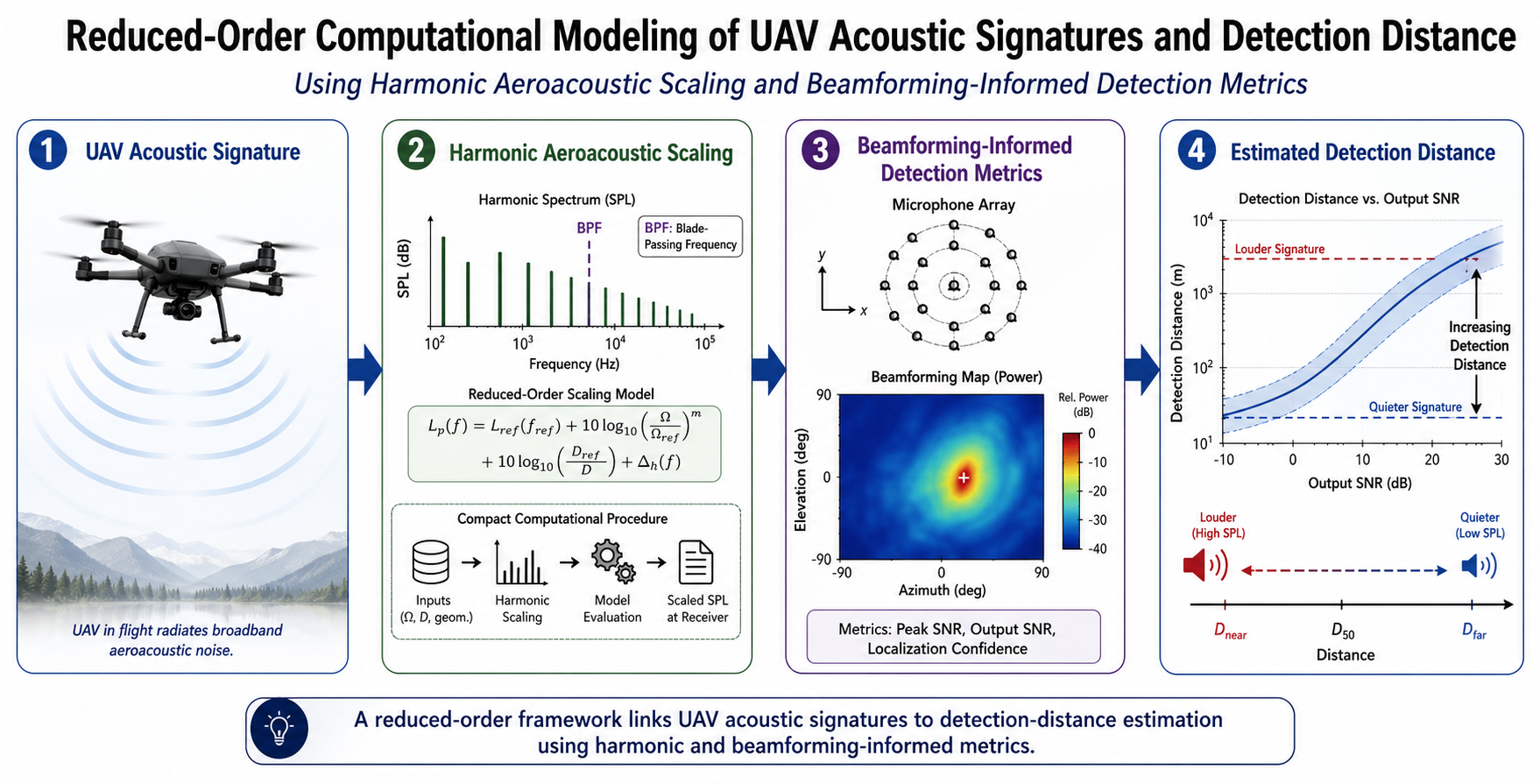
Small unmanned aerial vehicle (UAV) acoustic signatures have become increas-ingly relevant not only from the perspective of environmental noise mitigation, but also for detectability, surveillance vulnerability, and low-observable aerial system design. While most prior studies focus on rotor-noise reduction through high-fidelity computa-tional fluid dynamics (CFD) or experimental testing, comparatively fewer studies ad-dress reduced-order computational frameworks capable of rapidly predicting both acoustic signatures and detection distances under varying operating conditions. This study presents a physics-informed reduced-order computational aeroacoustic framework integrating blade passing frequency harmonic modeling, aeroacoustic scaling laws, atmospheric propagation, and beamforming-informed detectability metrics for rapid prediction of small UAV acoustic signatures. The methodology combines harmonic spectral synthesis, rotational speed scaling, source propagation modeling, and sig-nal-to-noise-based detection criteria to estimate sound pressure spectra, directional acoustic signatures, and acoustic detection distance envelopes. Computational results indicate strong agreement with trends reported in published UAV aeroacoustic ex-periments and suggest that propeller operating speed dominates both acoustic signature growth and detectability range. For representative multirotor conditions, modeled detection distances vary from approximately 80 m to over 200 m depending on rotational speed and ambient noise floor, while reduced source signature scenarios can reduce detectability by up to 30%. The proposed framework provides a computationally efficient tool for rapid aeroacoustic assessment, acoustic signature management, and preliminary low-observable UAV design.
Keywords:
UAV acoustics
; reduced-order modeling
; blade passing frequency
; aeroacoustics
; detection distance
; beamforming
; acoustic signature
; multirotor drones
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



