Submitted:
28 April 2026
Posted:
29 April 2026
You are already at the latest version
Abstract
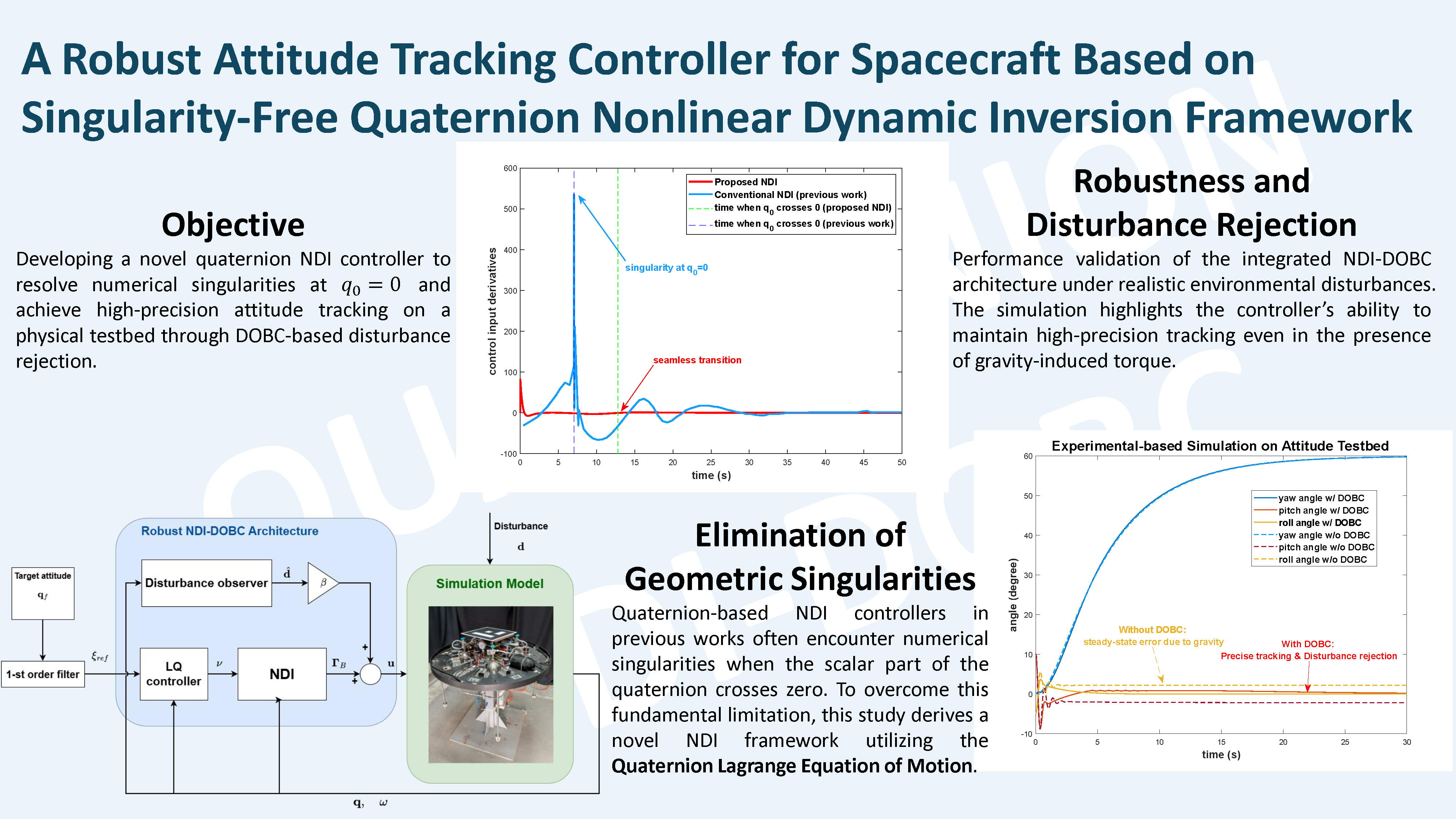
This paper presents a robust linear-quadratic attitude-tracking controller for a nonlinear spacecraft with disturbances. Quaternions are used to represent the spacecraft’s attitude to prevent gimbal lock associated with Euler angles. Nonlinear rotation dynamics are controlled by nonlinear dynamic inversion (NDI) with an augmented linear-quadratic controller. However, quaternions in rotation dynamics can encounter singularities during dynamic inversion, leading to numerical instability in control input calculations. To resolve this problem, we propose a new NDI method based on the Lagrange equation for quaternion dynamics. Since NDI may not fully compensate for nonlinearities due to unknown disturbances or modeling errors, a nonlinear disturbance observer is incorporated into the controller to compensate for disturbances. Simulations are performed to compare with previous work and according to a real attitude control testbed with gravity disturbances. Validation results demonstrate strong disturbance rejection and singularity-free performance for the proposed controller framework.
Keywords:
quaternions
; nonlinear dynamic inversion
; disturbance observer-based controller
; spacecraft attitude control
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



