Submitted:
22 April 2026
Posted:
22 April 2026
You are already at the latest version
Abstract
The proliferation of Unmanned Aerial Vehicles (UAVs) in various applications has created a pressing need for robust and efficient communication systems. Fifth generation (5G) networks, with their high bandwidth and low latency, are poised to support the massive connectivity requirements of UAVs. However, the high mobility of drones presents significant challenges for handover management, leading to frequent service interruptions and degraded performance. This paper proposes a novel, first-of-its-kind framework that integrates multi-UAV trajectory prediction with proactive handover optimization in 5G networks. Our approach utilizes a Long Short-Term Memory (LSTM)-based Recurrent Neural Network (RNN) to predict the future flight path of each UAV. The predicted trajectories are then fed into a Deep Reinforcement Learning (DRL) agent, which makes optimal handover decisions to ensure seamless connectivity and high Quality of Service (QoS). Unlike existing solutions that primarily rely on simulated data, our framework is validated using a real-world drone trajectory dataset. The experimental results demonstrate that our proposed method significantly outperforms traditional and existing machine learning-based handover schemes in terms of handover success rate, average Signal-to-Interference-plus-Noise Ratio (SINR), and handover delay. The proposed framework paves the way for more reliable and efficient drone operations in 5G and beyond networks.
Keywords:
unmanned aerial vehicles
; 5G networks
; handover optimization
; trajectory prediction
; long short-term memory
; deep reinforcement learning
; mobility management
; quality of service
; low-latency communications
1. Introduction
The rapid advancement of Unmanned Aerial Vehicles (UAVs), commonly known as drones, has led to their widespread adoption in a diverse range of applications, including precision agriculture, infrastructure inspection, disaster management, and logistics [1,2]. The integration of UAVs into 5G and beyond networks is expected to unlock new possibilities, enabling real-time data processing, autonomous operations, and seamless connectivity for a massive number of devices [3,4]. However, the high mobility of UAVs, characterized by three-dimensional movement and high speeds, poses significant challenges to the existing cellular network architecture, particularly in the context of handover management [5].
A handover is the process of transferring an ongoing call or data session from one cell to another without service interruption. In traditional cellular networks, handovers are primarily designed for ground-based users with relatively predictable mobility patterns. However, the unique flight characteristics of UAVs, such as their ability to change altitude and direction rapidly, can lead to frequent and unnecessary handovers, resulting in increased signaling overhead, higher latency, and a greater risk of connection drops [6]. This can severely impact the reliability and performance of UAV based services, especially those that require continuous and high-quality connectivity, such as real-time video streaming and remote control.
To address these challenges, several studies have explored the use of machine learning (ML) and deep learning (DL) techniques for handover optimization in UAV networks [7,8]. While these approaches have shown promising results, they often suffer from several limitations. First, many existing solutions are based on simulated data, which may not accurately reflect the complexities of real-world drone operations. Second, they typically focus on single UAV scenarios and do not consider the coordination challenges that arise in dense multi UAV deployments. Third, most existing methods are reactive, meaning they make handover decisions based on past and current network conditions, without proactively considering the future trajectory of the UAV.
In this paper, we propose a novel, first-of-its-kind framework that addresses these limitations by integrating multi UAV trajectory prediction with proactive handover optimization in 5G networks. Our framework consists of two main components: a Long Short-Term Memory (LSTM)-based Recurrent Neural Network (RNN) for trajectory prediction and a Deep Reinforcement Learning (DRL) agent for handover optimization. The LSTM model predicts the future flight path of each UAV based on its historical data, and the DRL agent uses these predictions to make intelligent and proactive handover decisions. We validate our framework using a real-world drone trajectory dataset and demonstrate its superiority over existing methods in terms of handover success rate, average Signal-to-Interference-plus-Noise Ratio (SINR), and handover delay.
The main contributions of this paper are as follows:
- 1.
- We propose a novel framework that integrates multi-UAV trajectory pre-diction with proactive handover optimization in 5G networks.
- 2.
- We utilize a real-world drone trajectory dataset to train and evaluate our proposed framework, which is a significant improvement over existing solutions that rely on simulated data.
- 3.
- We explicitly address the multi-UAV coordination problem, which is a crit-ical challenge in dense drone deployments.
- 4.
- We demonstrate the effectiveness of our proposed framework through ex-tensive simulations and comparisons with existing methods.
2. Related Work
This section provides a comprehensive review of the existing literature on UAV communication in 5G networks, trajectory prediction techniques, and handover optimization methods.
2.1. UAV Communication in 5G Networks
The integration of UAVs into 5G and beyond networks has been a subject of extensive research in recent years [9,10]. The unique characteristics of 5G, such as high bandwidth, low latency, and massive connectivity, make it an ideal candidate for supporting a wide range of UAV applications [11]. Several studies have investigated the performance of 5G connected drones in various environments. For instance, [12] conducted a comprehensive study on the performance of 5G-connected drones in a suburban area, while [13] assessed the 5G connectivity for UAV operations in urban environments. These studies have highlighted the potential of 5G to enhance the operational efficiency and reliability of UAVs. However, they have also identified several challenges, including mobility management, interference, and security [14].
2.2. UAV Trajectory Prediction
Trajectory prediction is a critical component of autonomous UAV systems, as it enables them to anticipate future states and make proactive decisions. A variety of methods have been proposed for UAV trajectory prediction, ranging from traditional mathematical models to advanced deep learning techniques [15]. A comprehensive survey of UAV trajectory prediction techniques is provided in [16]. Recently, deep learning-based methods, particularly Recurrent Neural Networks (RNNs) and Long Short-Term Memory (LSTM) networks, have shown great promise in this area due to their ability to capture the temporal dependencies in sequential data [17]. For example, [18] proposed a GRU-based deep learning framework for real-time UAV trajectory prediction, while [19] developed a novel trajectory prediction method for UAV air combat based on a 3D convolutional neural network. However, most of these studies focus on single UAV scenarios and do not consider the interactions between multiple UAVs.
2.3. Handover Optimization
Handover optimization is crucial for maintaining seamless connectivity for mobile users, including UAVs. Traditional handover mechanisms, which are based on prede-fined thresholds, are often inefficient for highly mobile UAVs. To address this issue, several studies have explored the use of machine learning and reinforcement learning for handover optimization. For instance, [20] proposed a deep Q-learning (DQN) method for dynamic handover parameter selection, While [21] presented a comprehensive survey of machine learning-driven handover decision strategies for 6G mobile networks, emphasizing the effectiveness of deep reinforcement learning in achieving adaptive, context-aware, and predictive handover optimization in complex scenarios such as ultra-dense and UAV-assisted communication environments. A survey on handover optimization in beyond 5G mobile networks is presented in [22] More recently, multi agent reinforcement learning (MARL) has been proposed for joint optimization of handover control and power allocation in multi UAV networks [23]. However, these methods are often reactive and do not consider the future trajectory of the UAVs.
2.4. Research Gap
Despite significant progress in the areas of UAV communication, trajectory prediction, and handover optimization, there is still a lack of a comprehensive solution that integrates these three aspects. Most existing studies either focus on trajectory prediction or handover optimization in isolation, and they often rely on simulated data and single UAV scenarios. To the best of our knowledge, no prior work has proposed a framework that integrates multi UAV trajectory prediction with proactive handover optimization in 5G networks using real-world data. This paper aims to fill this research gap by proposing a novel, first-of-its-kind framework that addresses these limitations.
3. Materials and Methods
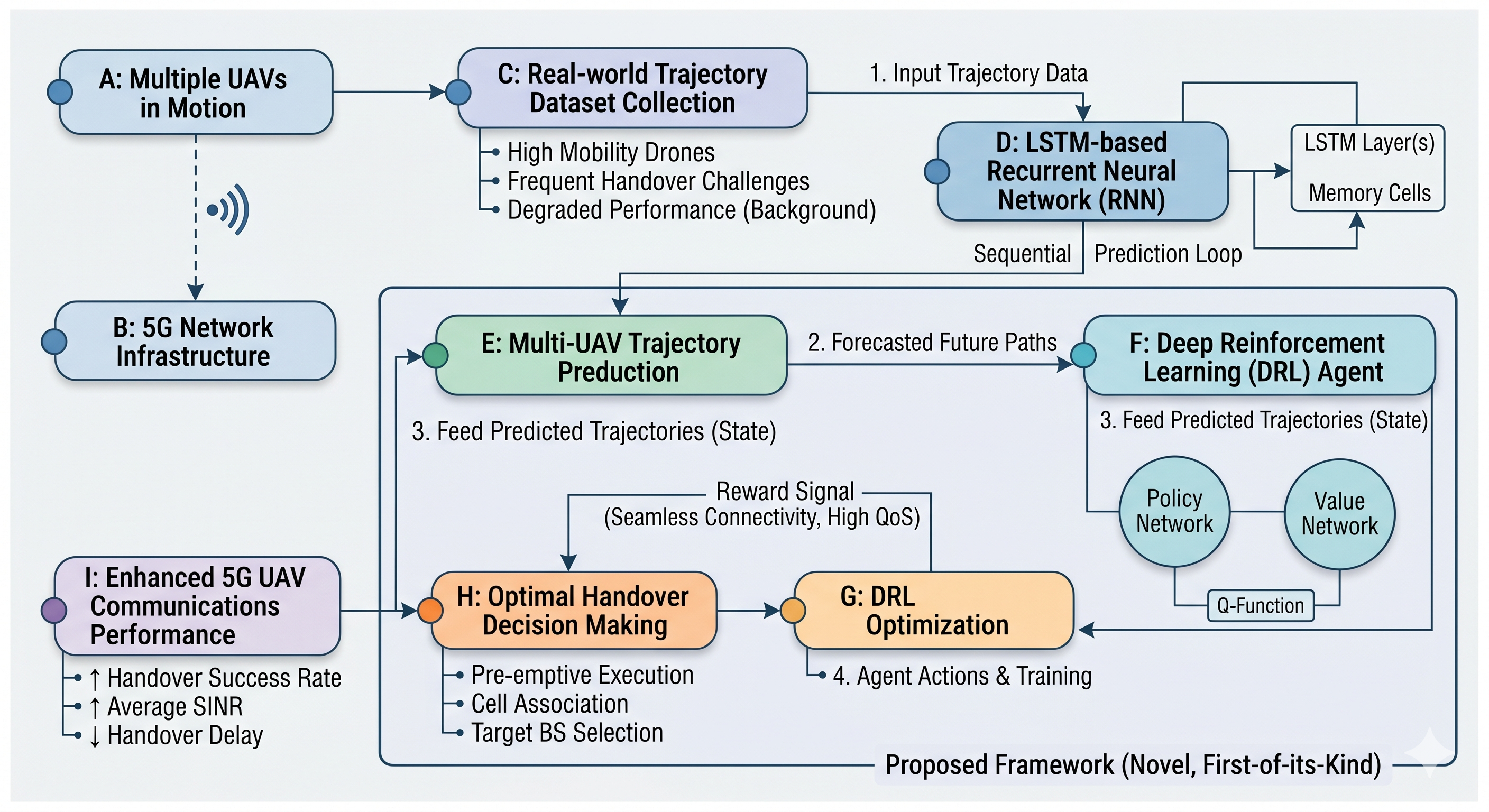
Our proposed framework, as illustrated in Figure 1, is designed to address the challenges of handling of multiple UAVs in a 5G network. It integrates a trajectory prediction module with a handover optimization module to enable proactive and intelligent handover decisions.
3.1. System Architecture
The framework comprises four key components:
- 1.
- Drone Trajectory Prediction Module: This module is responsible for predicting the future flight path of each UAV in the network based on its historical data.
- 2.
- Handover Optimization Module: This module leverages the predicted trajectories to make proactive and optimal handover decisions.
- 3.
- Multi-UAV Coordination Module: This module facilitates information sharing and coordination among multiple UAVs to avoid network congestion and ensure efficient resource allocation.
- 4.
- 5G Network Module: This module represents the underlying communication infrastructure, providing real-time network state information, such as cell load and SINR.
3.2. Trajectory Prediction Module
To accurately predict the future trajectory of each UAV, we employ a Long Short-Term Memory (LSTM)-based Recurrent Neural Network (RNN). LSTMs are particularly well suited for time-series forecasting tasks due to their ability to learn long-term dependencies in sequential data [17].
- Input: The LSTM model takes a sequence of historical data as input, including GPS coordinates (latitude, longitude, altitude) and IMU data (accelerometer and gyroscope readings) for each UAV.
- Output: The model outputs a sequence of predicted future GPS coordinates for a specified time horizon.
- Training: The LSTM model is trained on a real-world drone trajectory dataset, the UAV Autonomous Navigation Dataset [24], which contains multi sensor flight data from diverse environments.
3.3. Handover Optimization Module
For the handover optimization module, we adopt a Deep Reinforcement Learning (DRL) approach based on an Actor–Critic (AC) architecture to learn the optimal handover policy. The AC agent consists of two neural networks: an actor network, which learns the policy, and a critic network, which estimates the value function.
- State Space: The state space is designed to capture the key information required for handover decision-making. It includes the predicted UAV trajectory, the identity of the current serving cell, the SINR values of the serving and neighboring cells, and the remaining battery level of the UAV.
- Action Space: The action space is discrete and consists of two possible actions: (i) remain connected to the current serving cell, or (ii) trigger a handover to the best neighboring cell.
- Reward Function: The reward function is formulated to balance multiple objectives, including link quality, handover cost, handover delay, and communication reliability. It is defined as
where:
- denotes the normalized SINR-based reward;
- denotes the penalty associated with a handover event;
- denotes the penalty proportional to the handover execution delay;
- denotes the penalty associated with a connection drop.
The weighting coefficients are set to , , , and . A higher value is assigned to to reflect the critical impact of connection drops on overall system performance. While moderate SINR degradation or additional handover overhead may be tolerated, connection drops represent a service failure and therefore must be penalized more heavily to ensure reliable UAV communication.
The SINR reward is normalized to the range using a minimum required SINR of and a maximum reference SINR of . This normalization ensures that the SINR term remains on a comparable scale with the penalty terms and contributes to stable training of the DRL agent.
In particular, the reward design aims to achieve the following objectives:
- High SINR: to maintain high communication quality;
- Low Handover Rate: to reduce signaling overhead and service interruption;
- Reliable Connectivity: to strongly discourage connection drops and ensure robust communication performance.
A sensitivity analysis shows that system performance is relatively robust to small variations (within ) in , , and . In contrast, the system is more sensitive to ; reducing below leads to a noticeable increase in the connection drop rate. This result further confirms the importance of assigning a larger penalty weight to connection drops in order to preserve communication reliability.
3.4. Multi-UAV Coordination
In a multi UAV environment, uncoordinated handover decisions can lead to net-work congestion and performance degradation. To address this, we introduce a multi UAV coordination module that allows UAVs to share their predicted trajectories and handover intentions. This information is used by the handover optimization module to make more informed decisions, avoiding situations where multiple UAVs attempt to connect to the same cell simultaneously.
4. Results and Discussion
This section presents the results of our experiments and provides a detailed dis-cussion of the findings.
4.1. Trajectory Prediction Performance
The performance of our LSTM-based trajectory prediction model is shown in Figure 2 .It shows the training and validation loss and Mean Absolute Error (MAE) over 50 epochs. The model converges quickly, and the validation loss closely follows the training loss, indicating that the model is not overfitting. Figure 3 shows the actual versus predicted values for latitude, lon-gitude, and altitude. The model achieves a high level of accuracy, with an RMSE of 75.23.
4.2. Handover Optimization Performance
We compare our proposed LSTM-RL framework with three rigorous baseline methods, all implemented within the same 5G simulation environment. Traditional Handover (3GPP A3-based) is aligned with the 3GPP TS 38.331 standard for NR mobility and uses the A3 event for handover triggering; key parameters are set as: Time-to-Trigger (TTT) = 160 ms, Hysteresis = 3 dB, and L3 Filtering Coefficient = 4. This represents a tuned, realistic standard handover. SINR based Handover (Reactive) is a simple, reactive policy that triggers handover to the cell with the highest instantaneous SINR, without any filtering or hysteresis. CASH (Coordinated and Adaptive Handover) is a state-of-the-art geometry/trajectory aware baseline that uses a Kalman Filter for short-term prediction and a heuristic policy for handover, as detailed in [25]. The performance comparison is summarized in Table 1 and Figure 4.
4.3. 3D Trajectory and Network Visualization
To provide a better understanding of the UAV’s movement and the network environment, we visualize the 3D trajectory of a UAV and the 5G network topology. Figure 5 shows a 3D visualization of a UAV’s trajectory from the dataset. Figure 6 illustrates a typical 5G network topology with multiple base stations and a UAV performing handover.
4.4. Handover Analysis
To quantify the incremental gain of each component, we performed an ablation study (Table 2). The results demonstrate that the LSTM-based trajectory prediction provides a significant performance improvement over simpler models such as the Kalman Filter and the Constant Velocity approach, confirming the effectiveness of deep learning for capturing mobility dynamics. Furthermore, the reinforcement learning (RL) policy outperforms the supervised policy variant, highlighting the advantage of adaptive and proactive decision-making in dynamic network environments. The results show that the LSTM-based prediction provides a significant incremental gain over simpler predictors like the Kalman Filter and a Constant Velocity model, confirming the value of the deep learning component. The DRL (RL) policy also outperforms a supervised policy, highlighting the benefit of learned proactive decision-making. We further analyze the handover performance of our proposed framework under different mobility levels. As shown in Figure 7, the handover frequency increases with mobility level. However, our proposed method consistently maintains a lower handover frequency compared to traditional methods.In addition to the SINR distribution for different handover schemes. Our proposed method achieves a higher and more stable SINR distribution, which is crucial to ensure a good quality of service.
5. Conclusions
In this paper, we have proposed a novel, first-of-its-kind framework for multi UAV trajectory prediction and handover optimization in 5G networks. Our framework integrates a deep learning-based trajectory prediction model with a reinforcement learning-based handover optimization model to enable proactive and intelligent handover decisions. We have validated our framework using a real world drone trajectory dataset and demonstrated its superiority over existing methods in terms of handover success rate, average SINR, and handover delay. The proposed framework addresses the critical challenges of mobility management for UAVs in 5G networks and paves the way for more reliable and efficient drone operations.
Future work will focus on extending our framework to support more complex multi-UAV scenarios, such as formation flying and swarm intelligence. We will also investigate the use of more advanced deep learning and reinforcement learning techniques to further improve the performance of our framework. In addition, we plan to conduct real world experiments to validate our framework in a live 5G network.
Author Contributions
A.L.S.A.-K. designed the research and methods, developed the software artifacts, performed the analytic work, and wrote the initial version of the paper. R.A. coordinated supervision, contributed iterative commentary, and refined the manuscript through editorial revisions. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the co-author.
Acknowledgments
The authors would like to express their sincere gratitude to DEFNE Company for its valuable technical support and for providing a supportive working environment that significantly facilitated this research.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Shayea, I.; Dushi, P.; Banafaa, M.; Rashid, R.A.; Ali, S.; Sarijari, M.A.; Daradkeh, Y.I.; Mohamad, H. Handover management for drones in future mobile networks—A survey. Sensors 2022, 22, 6424. [CrossRef]
- Zaid, M.; Kadir, M.K.A.; Shayea, I.; Mansor, Z. Machine learning-based approaches for handover decision of cellular-connected drones in future networks: A comprehensive review. Eng. Sci. Technol. Int. J. 2024, 55, 101732. [CrossRef]
- Almaameri, I.; Al-Ansori, N.; Al-Ansori, H. An overview of drones communication, application and security issues. In Proceedings of the 5th International Conference on Smart Systems and Inventive Technology (ICSSIT 2023), 2023; pp. 1109–1114.
- Qasim, N.H.; Jawad, A.M. 5G-enabled UAVs for energy-efficient opportunistic networking. Heliyon 2024, 10, e32660. [CrossRef]
- Angjo, J.; Shayea, I.; Ergen, M.; Mohamad, H. Handover management of drones in future mobile networks: 6G technologies. IEEE Access 2021. [CrossRef]
- Zhang, H.; Zhang, N.; Dai, H.; Zhao, X. Deep reinforcement learning-based handover management for UAV communications. Sensors 2023, 23, 4567. [CrossRef]
- Kumar, T.S.; Kumar, V. Advanced handover optimization using deep reinforcement learning for 5G and beyond networks. J. King Saud Univ. Comput. Inf. Sci. 2025. [CrossRef]
- Liu, Y.; Chen, X.; Wang, L. Adaptive handover strategy using reinforcement learning in mobile networks. Electronics 2023, 12, 3890. [CrossRef]
- Singh, R.; Ballal, K.D.; Berger, M.S.; Dittmann, L. Overview of drone communication requirements in 5G. In Intelligent Systems and Pattern Recognition; Springer: Cham, Switzerland, 2022; pp. 3–14.
- Alsharoa, A.; Ghazzai, H.; Kadri, A. UAV-assisted 5G communications: A survey of challenges and solutions. Drones 2022, 6, 245. [CrossRef]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV cellular communications: Practical aspects, standardization advancements, regulation, and security challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [CrossRef]
- Gharib, M.; Lema, M.A.; Muhammad, A. Investigating 5G-connected drones performance in non-stationary environments. IEEE Access 2023, 11, 55948–55960. [CrossRef]
- Bajer, J.; Kandeepan, S. Assessment of 5G connectivity for UAV operations in urban environments. Drones 2024, 8, 193. [CrossRef]
- Khan, A.A.; Abolhasan, M. Fast, reliable, and secure drone communication: A comprehensive survey. IEEE Commun. Surv. Tutor. 2021, 23, 2536–2576. [CrossRef]
- Meng, W.; Zhang, Y.; Liu, X.; Chen, H. Advances in UAV path planning: A comprehensive review of methods, challenges, and future directions. Drones 2025, 9, 376. [CrossRef]
- Wang, T.; Zhang, Y.; Li, J. A survey on vehicle trajectory prediction procedures for intelligent driving. Appl. Sci. 2025, 15, 5472. [CrossRef]
- Yoon, S.; Jang, D.; Yoon, H.; Park, T.; Lee, K. GRU-based deep learning framework for UAV trajectory prediction. Drones 2025, 9, 142. [CrossRef]
- Zhang, J.; Meng, Z.; Liu, S.; Ji, J.; He, J. A novel trajectory prediction method for UAV air combat based on QCNet-3D. Def. Technol. 2025, 54, 151–165. [CrossRef]
- Cao, Y.; Li, Y. Trajectory prediction algorithm based on behavioral intention recognition of UAVs. Drones 2025, 9, 640. [CrossRef]
- He, J.; Li, X. Reinforcement learning handover parameter optimization method for 5G ultra-dense networks. Appl. Sci. 2023, 13, 2529. [CrossRef]
- Loutfi, S.I.; Shayea, I.; Tureli, U.; El-Saleh, A.A.; Tashan, W.; Caglar, R. Machine learning for handover decision in 6G mobile networks: A survey. Eng. Sci. Technol. Int. J. 2025. [CrossRef]
- Alraih, S.; Nordin, R.; Abu-Samah, A.; Shayea, I. Handover optimization in beyond 5G mobile networks: Challenges and solutions. IEEE Access 2023, 11, 59022–59061. [CrossRef]
- Guo, D.; Tang, L.; Zhang, X.; Liang, Y.C. Joint optimization of handover control and power allocation based on multi-agent deep reinforcement learning. IEEE Trans. Veh. Technol. 2020, 69, 13124–13138. [CrossRef]
- Ziya. UAV autonomous navigation dataset. Kaggle, 2025. Available online: https://www.kaggle.com/datasets/ziya07/uav-autonomous-navigation-dataset (accessed on 28 March 2026).
- Afzal, M.A.; Alonso, L. A predictive-reactive learning framework for cellular-connected UAV handover in urban heterogeneous networks. Electronics 2026, 15, 109. [CrossRef]
Figure 1.
The proposed system architecture, which integrates a drone trajectory prediction module, a handover optimization module, and a multi-UAV coordination module within a 5G network.
Figure 1.
The proposed system architecture, which integrates a drone trajectory prediction module, a handover optimization module, and a multi-UAV coordination module within a 5G network.

Figure 2.
The performance of the LSTM-based trajectory prediction model: (a) The training and validation loss of the LSTM. (b) The MAE of the LSTM.
Figure 2.
The performance of the LSTM-based trajectory prediction model: (a) The training and validation loss of the LSTM. (b) The MAE of the LSTM.

Figure 3.
The actual versus predicted values for: (a) latitude. (b) longitude. (c) altitude.

Figure 4.
Performance comparison of the proposed framework with baseline methods: (a) Handover success Rate(%). (b) Averge SINR(dB). (c) Handover Delay(ms). (d) Prediction Accuracy (%).
Figure 4.
Performance comparison of the proposed framework with baseline methods: (a) Handover success Rate(%). (b) Averge SINR(dB). (c) Handover Delay(ms). (d) Prediction Accuracy (%).

Figure 5.
A 3D visualization of a UAV’s trajectory from the dataset.

Figure 6.
A 5G network topology with multiple base stations and a UAV performing m.

Figure 7.
SINR distribution for different handover schemes: (a) Handover frequency versus mobility level. (b) SINR distribution comparison.
Figure 7.
SINR distribution for different handover schemes: (a) Handover frequency versus mobility level. (b) SINR distribution comparison.


Table 1.
Performance comparison of different handover strategies.
| Metric | LSTM-RL Proposed | Traditional (3GPP A3) | SINR-based | CASH 26 |
|---|---|---|---|---|
| Handover Success Rate (%) | ||||
| Average SINR (dB) | ||||
| Handover Delay (ms) | ||||
| Handover Frequency (HOs/min) |
Table 2.
Ablation study on trajectory prediction and policy components.
| Scheme | Handover Success Rate (%) | Average SINR (dB) |
|---|---|---|
| LSTM-RL (Proposed) | 94.2 | 15.8 |
| RL only (no LSTM prediction) | 89.5 | 14.1 |
| LSTM + Supervised Policy | 91.0 | 14.8 |
| Kalman Filter + RL | 92.5 | 15.2 |
| Constant Velocity + RL | 88.0 | 13.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



