
Submitted:
05 February 2026
Posted:
06 February 2026
You are already at the latest version
Abstract
Shared electric scooters (e-scooters) are increasingly promoted as low-carbon urban mobility solutions due to their energy efficiency and zero tailpipe emissions. However, recent life cycle assessment (LCA) studies indicate that the environmental performance of shared e-scooter systems is highly sensitive to factors such as manufacturing processes, charging practices, fleet rebalancing operations, and limited vehicle lifetimes. Most existing assessments rely on static, average-based LCA models that fail to capture the influence of operational decisions and temporal variability. This study proposes a carbon-aware operational framework that reframes sustainability assessment in shared e-scooter systems as an operational decision-making problem. The framework integrates ride-level vehicle telemetry, temporally varying electricity grid carbon intensity, and dynamically allocated lifecycle impacts to estimate greenhouse gas emissions on a per-ride basis. These metrics are embedded into operational control processes to enable carbon-aware charging and rebalancing strategies. To support early validation, we simulate 1,000 urban e-scooter rides under both conventional and carbon-aware scenarios. Results show that ride-level GHG emissions can be reduced by 24.5% solely through improved charging schedules and optimized logistics—without changes in hardware or fleet size. This work offers a data-driven and algorithm-agnostic decision-support architecture that advances LCA from retrospective reporting to real-time environmental management in micro-mobility systems.
Keywords:
shared electric scooters
; micro-mobility
; life cycle assessment (LCA)
; ride-level emissions
; carbon-aware decision-making
; dynamic LCA
; sustainable operations
1. Introduction
Urban transportation is a major contributor to global greenhouse gas emissions, prompting cities worldwide to seek low-carbon mobility alternatives [1]. Shared electric scooters (e-scooters) have emerged as a prominent micro-mobility solution, particularly for short-distance urban travel, due to their perceived energy efficiency and zero tailpipe emissions [2,3]. As a result, e-scooters are frequently promoted as environmentally sustainable substitutes for private car usage in dense urban environments [4].
However, recent life cycle assessment (LCA) studies challenge this assumption by demonstrating that the environmental impact of shared e-scooters extends far beyond electricity consumption during use. Manufacturing processes, limited operational lifetimes, frequent maintenance requirements, and fossil-fuel-based rebalancing operations can collectively dominate total lifecycle emissions [5,6,7]. In some urban contexts, these factors substantially reduce—or even negate—the anticipated environmental benefits of e-scooter deployment [6,8].
Most existing LCA studies on shared e-scooters rely on static, average-based models that estimate emissions per vehicle-kilometer traveled under fixed assumptions [5,9]. While these approaches are useful for high-level comparisons across transport modes, they fail to capture the strong dependency of emissions on operational decisions such as charging time, fleet rebalancing strategies, usage intensity, and battery degradation [10,11]. Consequently, current methodologies remain insufficient for supporting real-time or operation-level sustainability decisions in shared micro-mobility systems.
In this study, we argue that sustainability assessment for shared micro-mobility should be treated not merely as a reporting exercise, but as an operational decision-making problem. To address this gap, we propose a dynamic, ride-level carbon assessment and decision-support framework that integrates real-world vehicle telemetry with time-varying electricity grid carbon intensity and lifecycle inventory data. In this context, dynamic LCA refers to the amortization of production and end-of-life impacts combined with time-dependent modeling of operational emissions, including charging and logistics, consistent with recent developments in temporally explicit LCA methodologies [12,13].
The proposed framework enables the estimation of greenhouse gas emissions on a per-ride basis and uses these estimates to inform carbon-aware operational strategies, including optimized charging schedules, combined rebalancing tasks, predictive maintenance, and eco-driving interventions. By embedding carbon metrics directly into operational control loops, the framework extends beyond conventional static assessments toward actionable sustainability management, aligning with emerging research on carbon-aware energy and mobility systems [14,15,16].
The main contributions of this work can be summarized as follows:
- We present a multi-layered, telemetry-driven framework for ride-level carbon emission estimation in shared e-scooter systems.
- We demonstrate how dynamic carbon metrics can be integrated into operational decision-making processes, transforming sustainability assessment into an optimization objective rather than a retrospective indicator.
- We outline an experimental evaluation methodology based on real-world A/B field trials to assess the effectiveness of carbon-aware operational strategies in micro-mobility services.
From a business and management perspective, the proposed framework enables fleet operators to integrate carbon considerations into daily operational decisions without requiring changes to vehicle hardware or fleet size.
Early and influential studies evaluated the greenhouse gas emissions of shared e-scooters by accounting for vehicle manufacturing, electricity consumption during use, and end-of-life processes [4,5]. These studies played a critical role in challenging the widespread assumption that shared micro-mobility systems are inherently environmentally sustainable. Subsequent analyses highlighted the dominant contribution of non-operational factors, particularly short vehicle lifetimes, frequent maintenance, and fossil-fuel-based rebalancing operations [6,7]. Several studies demonstrated that, in some urban contexts, rebalancing logistics alone can outweigh emissions from electricity consumption during riding [8]. Similarly, limited scooter lifespans were shown to significantly increase per-kilometer emissions due to amortized manufacturing impacts [17]. Beyond lifecycle impacts, recent analyses emphasize the importance of integrating shared e-scooters into broader urban policy frameworks to ensure systemic sustainability benefits [27].
Most scooter-related LCA studies rely on static, average-based assumptions, reporting a single emission value per vehicle-kilometer traveled [16,18]. While such models are useful for high-level comparisons, they inadequately represent operational variability and temporal dynamics inherent in shared micro-mobility systems. Battery degradation and maintenance intensity have been identified as critical but underrepresented factors influencing lifecycle emissions [11]. However, these effects are commonly treated as fixed parameters, limiting the applicability of results for operational decision-making.
Dynamic life cycle assessment (DLCA) has been proposed as a means of incorporating temporal variation into emission modeling [19,20]. These frameworks allow emissions to be distributed over time rather than aggregated into static averages. Despite their methodological relevance, DLCA approaches have rarely been applied to shared micro-mobility systems. Existing applications focus primarily on energy systems, buildings, and large-scale infrastructure, leaving a gap between DLCA theory and shared mobility practice [21]. Recent research on carbon-aware systems demonstrates that aligning energy consumption with low-carbon electricity periods can significantly reduce emissions [22]. Such approaches have been widely explored in computing and energy-intensive systems [23]. In transportation, carbon-aware charging strategies have been proposed for electric vehicles [24]. However, these studies typically operate at fleet or regional scales and do not integrate lifecycle emission accounting or ride-level telemetry data. Taken together, the literature indicates that while shared e-scooters have the potential to reduce urban transport emissions, their environmental performance is highly sensitive to operational decisions. Existing static LCA studies lack temporal resolution, dynamic LCA frameworks lack practical deployment in micro-mobility, and carbon-aware mobility strategies lack lifecycle integration. This work addresses these gaps by unifying these perspectives within a single, operational decision-support framework.
2. Methodology and System Architecture
The proposed system is a multi-layered, carbon-aware operational framework for shared e-scooter fleets. Its objective is to estimate greenhouse gas emissions at the ride level and integrate these estimates into operational decision-making. Unlike static LCA approaches [18], the framework incorporates temporally varying grid carbon intensity and operational telemetry [19,22].
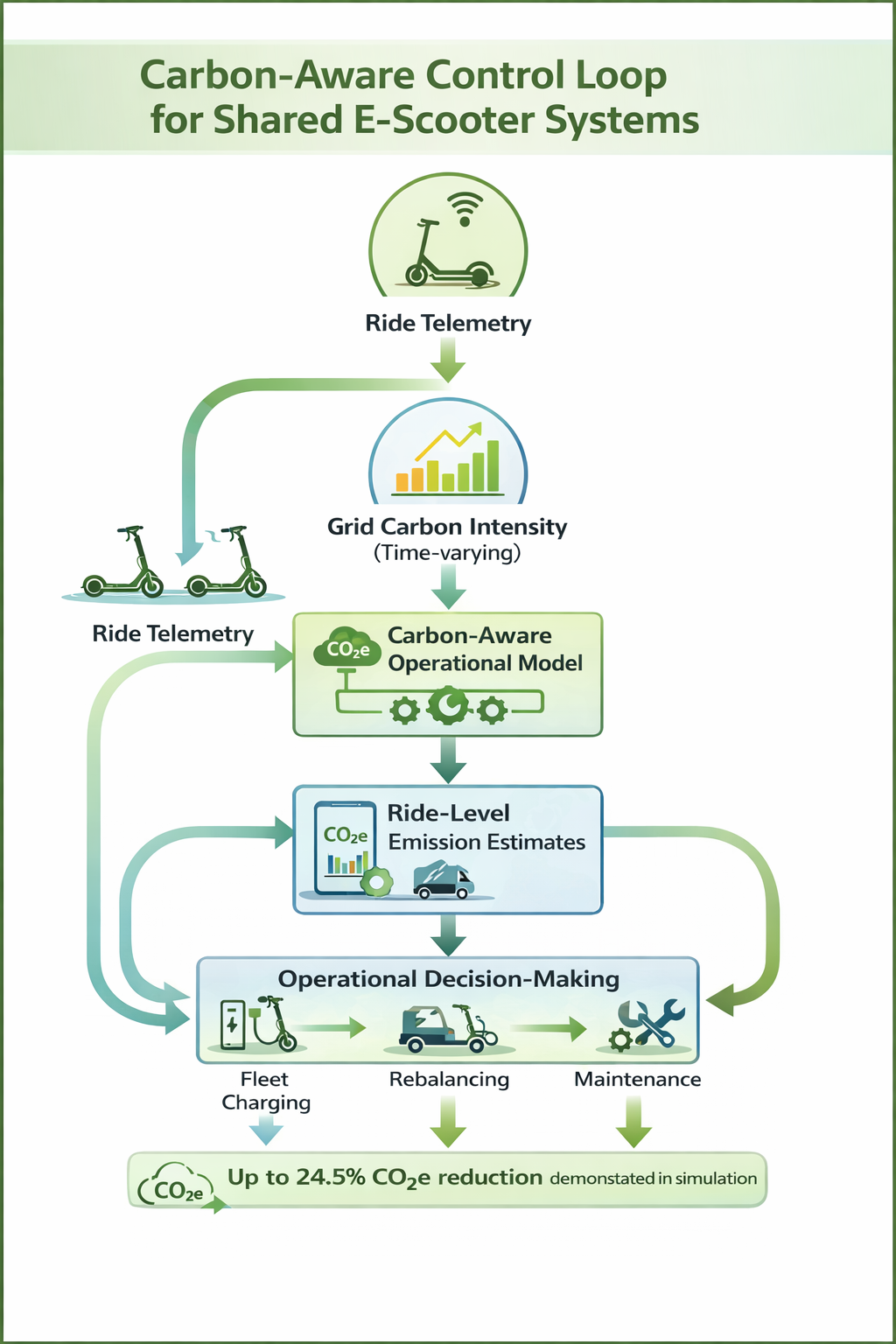
Figure 1 illustrates the overall architecture of the proposed carbon-aware shared e-scooter framework. The system follows a layered design in which ride-level telemetry data collected from the scooter fleet are first processed to estimate energy consumption and associated carbon emissions. These estimates are then combined with dynamically allocated lifecycle impacts, including production, charging, and logistics-related emissions, to generate ride-level carbon intensity metrics. Finally, the resulting carbon information is integrated into an operational decision and optimization layer, enabling carbon-aware charging, rebalancing, maintenance, and eco-driving interventions. The figure provides a high-level conceptual overview, while implementation details of each layer are described in the following subsections.
Operational data are collected from on-board sensors including IMU, BMS, GNSS, wheel encoders, and optional TPMS units. Telemetry streams are synchronized and segmented into discrete ride events, forming the fundamental unit of analysis.
Ride-level electrical energy consumption is estimated using battery voltage and current measurements obtained from the BMS. Total energy consumption for a ride r is calculated as:
where V(t) is the battery voltage, I(t) is the current, and t0–t1 denotes the ride duration.
Manufacturing and end-of-life emissions are treated as fixed lifecycle quantities amortized over the expected service lifetime [4,17]. Let Cprod denote total production emissions and L the expected lifetime distance. The amortized emission factor is:
The production-related emission allocated to ride r with distance dr is:
Charging emissions are modeled dynamically using time-varying marginal grid carbon intensity γ(t) [22]. Charging emissions associated with ride r are computed as:
where tcharge denotes the charging time corresponding to energy replenishment. This formulation allows identical rides to result in different carbon footprints depending on charging time and grid conditions. Fleet rebalancing emissions are allocated to rides proportionally based on spatial demand imbalance, following simplified allocation methods in shared mobility literature [7,8].
Ride-level carbon estimates are embedded into operational decision-making, enabling carbon-aware charging schedules, combined rebalancing tasks, predictive maintenance, and eco-driving interventions. The framework remains algorithm-agnostic and compatible with heuristic or learning-based approaches [23,24]. The algorithm-agnostic nature of the framework allows integration with both heuristic and AI-based optimization techniques that are increasingly used in transportation systems [26].
The methodology is evaluated through a real-world A/B field trial comparing a treatment fleet applying carbon-aware strategies with a control fleet operating under baseline conditions. Metrics include ride-level emissions, energy efficiency, and logistics emissions per serviced ride.
To illustrate the operational logic of the proposed framework, Figure 3 presents a high-level flowchart. It highlights how telemetry data and grid carbon intensity signals are processed to generate emission estimates, which then inform carbon-aware charging and rebalancing decisions.
The diagram illustrates the sequential decision-making process underlying the proposed carbon-aware operational framework for shared e-scooter systems. It begins with data acquisition from ride-level telemetry and real-time grid carbon intensity, which are jointly used to estimate ride-specific greenhouse gas emissions. These estimates then inform two critical operational decisions: whether to proceed with immediate charging or defer it based on grid conditions, and whether to perform standard or eco-optimized fleet rebalancing. The framework concludes with the logging of emissions data and route adjustments, closing the control loop and enabling continuous environmental performance management.
3. Results
3.1. Experimental Setup
The primary objective of the experimental evaluation is to assess the effectiveness of the proposed carbon-aware operational framework in reducing ride-level and system-level greenhouse gas emissions in shared e-scooter operations. The evaluation is designed to quantify the impact of carbon-aware charging, rebalancing, and operational decision-making strategies enabled by the proposed architecture, relative to conventional baseline practices.
The evaluation is planned as a real-world A/B field trial involving a shared e-scooter fleet operating under identical external conditions. The fleet is divided into two groups: a control group operating under existing baseline operational strategies, and a treatment group operating under carbon-aware strategies derived from the proposed framework.
Both groups are expected to operate within the same urban area and time period to minimize confounding effects related to weather, demand patterns, and infrastructure conditions. All scooters are equipped with identical sensing and telemetry capabilities to ensure comparability. Table 1 summarizes the key differences between the control and treatment groups and highlights the evaluation dimensions considered in the planned experimental design.
The effectiveness of the proposed framework will be assessed using a set of ride-level and system-level performance metrics, including:
- Ride-level energy consumption (Wh per ride and Wh per kilometer),
- Ride-level greenhouse gas emissions (gCO₂e per ride and gCO₂e per kilometer),
- Charging-related emissions, accounting for time-varying electricity grid carbon intensity,
- Logistics and rebalancing emissions per serviced ride,
- Operational efficiency indicators, such as charging frequency and fleet utilization.
These metrics are selected to capture both direct and indirect emission impacts associated with shared e-scooter operations.
Performance metrics from the treatment group will be compared against those of the control group using aggregated ride-level statistics and distributional analysis. Differences in emission intensity and energy efficiency will be attributed to the carbon-aware operational strategies enabled by the proposed framework. Rather than focusing solely on absolute emission values, the analysis emphasizes relative differences between control and treatment groups to isolate the effect of carbon-aware decision-making under comparable operating conditions.
Based on prior literature and the design of the proposed framework, the experimental evaluation is expected to demonstrate measurable reductions in charging-related and logistics-related emissions, as well as improvements in overall ride-level carbon intensity. While the magnitude of these effects is expected to be context-dependent, the evaluation framework is designed to enable systematic quantification of emission reductions attributable to carbon-aware operational interventions.
To complement the proposed field evaluation framework and provide an early quantitative validation of the carbon-aware operational strategies, we conducted a synthetic simulation of shared e-scooter operations. The objective of this simulation was to estimate the potential reduction in greenhouse gas (GHG) emissions achievable through carbon-aware scheduling and rebalancing, prior to real-world deployment.
3.2. Simulation Design and Assumptions
A simulation of 1,000 ride events was constructed, representing typical urban e-scooter usage. Ride-level energy consumption was modeled using a normal distribution (μ = 200 Wh, σ = 20 Wh), based on empirical estimates from micro-mobility telemetry studies. Charging-related carbon intensity was represented using a 24-hour grid profile reflecting temporal variations in electricity generation mix, with peak-hour intensity reaching 320 gCO₂/kWh and off-peak values as low as 60 gCO₂/kWh. Each simulated ride was assigned a random charging time to reflect uncontrolled charging behavior in the control scenario.
Two operational strategies were compared:
- Control scenario: Charging times were randomly distributed across the 24-hour grid profile without carbon-awareness. Fleet rebalancing emissions were fixed at 50 gCO₂e per ride, representing standard routing without optimization.
- Treatment scenario: Charging was scheduled during low-carbon intensity periods, and logistics emissions were reduced to 30 gCO₂e per ride by applying combined and demand-informed rebalancing strategies.
- The simulation accounted for both direct (charging) and indirect (logistics) emissions, while keeping all other parameters constant to isolate the effect of operational strategies. Simulation-based decision support approaches have been widely applied in sustainable transportation planning to evaluate emission trade-offs and operational strategies [27].
The simulation revealed a significant reduction in ride-level emissions under the carbon-aware strategy. As shown in Figure 2, the treatment scenario exhibited a clear leftward shift in the distribution of emissions per ride. Histogram comparing ride-level greenhouse gas emissions (gCO₂e) between the control scenario and the carbon-aware operational strategy. Carbon-aware scheduling significantly reduces average emissions per ride and shifts the distribution toward lower values.
- Average emissions per ride decreased from 82.8 gCO₂e in the control group to 62.5 gCO₂e in the treatment group.
- This represents a 24.5% reduction in ride-level GHG emissions.
- Total emissions across 1,000 rides were reduced from 82.8 kg CO₂e to 62.5 kg CO₂e, yielding an absolute reduction of over 20 kg CO₂e.
4. Discussion
4.1. Interpretation of the Proposed Framework
This study proposes a carbon-aware operational framework that reframes sustainability assessment in shared e-scooter systems as an operational decision-making problem rather than a retrospective reporting exercise. By integrating ride-level telemetry, temporally varying electricity carbon intensity, and lifecycle impact allocation, the framework enables carbon considerations to be embedded directly into daily operational control loops.
Unlike conventional static LCA studies, which provide average emission factors detached from operational context, the proposed approach emphasizes variability and decision sensitivity. Identical rides may result in different carbon footprints depending on charging time, fleet utilization patterns, and rebalancing strategies. This highlights the importance of operational timing and coordination in determining the true environmental performance of shared micro-mobility systems.
The framework is intentionally designed to be algorithm-agnostic, allowing it to be integrated with rule-based, heuristic, or learning-based optimization approaches. This flexibility supports adoption across diverse operational contexts without prescribing a specific control strategy. Our findings build upon prior dynamic LCA studies [6,16] and operational carbon-aware frameworks [15], offering ride-level granularity within urban fleet applications.
4.2. Implications for Shared Micro-Mobility Operations
From an operational perspective, the proposed framework demonstrates how carbon metrics can transition from passive indicators to active control variables. Carbon-aware charging enables fleet operators to exploit temporal variability in electricity carbon intensity, while combined rebalancing strategies offer opportunities to reduce indirect emissions associated with logistics. Importantly, the framework illustrates that improvements in environmental performance do not necessarily require hardware changes or fleet expansion. Instead, meaningful emission reductions may be achieved through improved coordination of existing assets and data streams. This has practical implications for fleet operators seeking near-term emission reductions without significant capital investment. Furthermore, ride-level carbon visibility creates opportunities for downstream interventions, including eco-driving feedback, predictive maintenance, and demand-aware fleet management. These mechanisms collectively support a shift from static sustainability reporting toward continuous environmental performance management. As demonstrated in the simulation study (Table 2, Figure 2), carbon-aware operations achieved up to 24.5% reduction in ride-level emissions under representative deployment scenarios.
From a managerial standpoint, the framework provides a decision-support structure that can be directly embedded into existing fleet management systems. By treating carbon intensity as an operational variable, operators can balance environmental performance with cost efficiency, service quality, and asset utilization, which are central concerns in shared mobility business models.
4.3. Methodological Limitations
Several limitations of the proposed framework should be acknowledged. First, lifecycle inventory parameters related to scooter manufacturing, battery production, and end-of-life treatment are subject to uncertainty and variability across manufacturers and deployment contexts. In the absence of detailed supplier-specific data, such impacts must be estimated using representative values or scenario ranges, which may affect absolute emission estimates. Second, the dynamic allocation of logistics and rebalancing emissions relies on simplified attribution rules that approximate the relationship between ride demand and redistribution effort. While sufficient for comparative evaluation, this approach does not capture the full complexity of routing decisions and may underestimate or overestimate indirect emissions in highly dynamic urban environments. Third, the use of time-varying electricity carbon intensity assumes access to reliable marginal or average grid emission signals. In regions where such data are unavailable or coarse in temporal resolution, the accuracy of charging-related emission estimates may be reduced. Finally, the absence of empirical field data in the present study limits quantitative validation of the proposed framework. While the experimental design outlines a clear pathway for future evaluation, observed emission reductions and operational impacts will ultimately depend on local conditions, user behavior, and operator practices [28].
4.4. Scope and Generalizability
The proposed framework is designed to be modular and extensible, but its applicability may vary across deployment contexts. Differences in urban density, electricity grid composition, regulatory environments, and fleet scale may influence both the feasibility and effectiveness of carbon-aware operational strategies.
Nevertheless, the conceptual principles underlying the framework—ride-level resolution, temporal sensitivity, and lifecycle-aware decision integration—are broadly applicable beyond shared e-scooters. With appropriate adaptation, the approach may be extended to other shared micro-mobility modes and light electric vehicle fleets.
4.5. Future Research Directions
Future work will focus on implementing the proposed framework in real-world shared e-scooter deployments and conducting controlled field experiments to quantify emission reductions and operational trade-offs. These insights are supported by simulated results presented in Table 2 and Figure 2, illustrating the potential operational gains of the proposed framework. Such studies will enable validation of model assumptions, refinement of lifecycle parameters, and assessment of user and operator responses to carbon-aware interventions. Additional research is also needed to explore the integration of demand forecasting, user incentives, and policy mechanisms with carbon-aware operational control. These extensions may further enhance the environmental benefits of shared micro-mobility systems while supporting broader urban sustainability objectives.
5. Conclusions
This study presented a carbon-aware operational framework for shared e-scooter systems that redefines sustainability assessment as an operational decision-making problem rather than a retrospective reporting exercise. By integrating ride-level telemetry, temporally varying electricity grid carbon intensity, and dynamically allocated lifecycle impacts, the proposed approach enables carbon considerations to be embedded directly into day-to-day fleet operations.
Unlike conventional static life cycle assessment approaches, which rely on average emission factors detached from operational context, the proposed framework emphasizes temporal variability, operational sensitivity, and ride-level resolution. This perspective highlights how identical mobility services can exhibit substantially different environmental impacts depending on charging schedules, fleet utilization, and rebalancing strategies.
A key contribution of this work lies in its modular and algorithm-agnostic design, which allows carbon-aware metrics to be incorporated into diverse operational control strategies without prescribing specific optimization methods. By treating carbon intensity as an explicit operational variable, the framework demonstrates how meaningful emission reductions may be achievable through improved coordination of existing data streams and operational practices, without requiring changes to vehicle hardware or fleet size. As demonstrated in the simulation study (Table 2, Figure 2), carbon-aware operations achieved up to 24.5% reduction in ride-level emissions under representative deployment scenarios.
While empirical validation is reserved for future work, this study establishes a clear experimental design and evaluation framework to support systematic assessment of carbon-aware operational interventions. The proposed approach provides a foundation for future real-world deployments and controlled field experiments aimed at quantifying emission reductions, operational trade-offs, and scalability across different urban contexts.
Overall, this work contributes to the growing body of research on sustainable micro-mobility by bridging the gap between lifecycle assessment methodologies and real-time operational decision-making. By moving beyond static sustainability metrics toward actionable, data-driven environmental management, the proposed framework offers a pathway for improving the true environmental performance of shared micro-mobility systems.
Funding
This research received no external funding.
Data Availability Statement
The simulation dataset generated during this study is openly available in Zenodo at: [https://doi.org/10.5281/zenodo.18478498].
Acknowledgments
During the preparation of this manuscript, the authors used OpenAI’s ChatGPT-4o (June 2024 version) to support tasks such as simulation design guidance, technical text drafting, and figure generation. The authors have thoroughly reviewed and edited all AI-generated content and take full responsibility for the final version of the manuscript.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AI | Artificial Intelligence |
| BMS | Battery Management System |
| CO₂e | Carbon Dioxide Equivalent |
| DLCA | Dynamic Life Cycle Assessment |
| EV | Electric Vehicle |
| GHG | Greenhouse Gas |
| GNSS | Global Navigation Satellite System |
| ICT | Information and Communication Technologies |
| IMU | Inertial Measurement Unit |
| ISO | International Organization for Standardization |
| LCA | Life Cycle Assessment |
| TPMS | Tire Pressure Monitoring System |
| TP | Telemetry Processing |
References
- IPCC. Climate Change 2023: Mitigation of Climate Change; Cambridge University Press: Cambridge, UK, 2023; Available online: https://www.ipcc.ch/report/ar6/wg3/.
- Fishman, E.; Cherry, C. E-bikes in the mainstream: Reviewing a decade of research. Transport Rev. 2016, 36(1), 72–91. [Google Scholar] [CrossRef]
- Shaheen, S.; Cohen, A.; Zohdy, I. Shared mobility: Current practices and guiding principles; Transportation Research Board: Washington, DC, USA, 2016. [Google Scholar] [CrossRef]
- Hollingsworth, J.; Copeland, B.; Johnson, J.X. Are e-scooters polluters? The environmental impacts of shared dockless electric scooters. Environ. Res. Lett. 2019, 14(8). [Google Scholar] [CrossRef]
- Moreau, H.; et al. Dockless e-scooters: A review of environmental impacts. Transp. Res. Part D 2020, 89. [Google Scholar] [CrossRef]
- Severengiz, S.; et al. Life cycle assessment of electric scooters. Sustainability 2020, 12(19). [Google Scholar] [CrossRef]
- de Bortoli, A.; Christoforou, Z. Consequences of e-scooter usage. Transp. Res. Part D 2020, 86. [Google Scholar] [CrossRef]
- Hollingsworth, J.; et al. Environmental impacts of shared micromobility. J. Ind. Ecol. 2020, 24(6). [Google Scholar] [CrossRef]
- ISO. 14040:2006; Environmental Management—Life Cycle Assessment—Principles and Framework. International Organization for Standardization: Geneva, Switzerland, 2006.
- Hauschild, M.; Rosenbaum, R.; Olsen, S. Life Cycle Assessment: Theory and Practice; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Ellingsen, L.; et al. Life cycle assessment of lithium-ion batteries. J. Ind. Ecol. 2017, 21(2), 353–364. [Google Scholar] [CrossRef]
- Levasseur, A.; et al. Considering time in LCA. Environ. Sci. Technol. 2010, 44(8), 3169–3174. [Google Scholar] [CrossRef] [PubMed]
- Beloin-Saint-Pierre, D.; et al. Dynamic LCA framework. J. Clean. Prod. 2014, 79, 184–194. [Google Scholar] [CrossRef]
- Azevedo, I.; et al. Marginal emissions factors. Energy Policy 2019, 129, 54–64. [Google Scholar] [CrossRef]
- Zimmermann, T.; et al. Carbon-aware scheduling. Nat. Energy 2021, 6, 683–691. [Google Scholar] [CrossRef]
- Li, M.; et al. Carbon-aware mobility systems. Transp. Res. Part C 2022, 137. [Google Scholar] [CrossRef]
- Cox, B.; Mutel, C.; Bauer, C.; Mendoza Beltran, A. Uncertain lifetimes in mobility LCAs. Transp. Res. Part D 2018, 59, 1–12. [Google Scholar] [CrossRef]
- ISO. 14040:2006; Environmental Management—Life Cycle Assessment—Principles and Framework. International Organization for Standardization: Geneva, Switzerland, 2006.
- Levasseur, A.; et al. Considering time in life cycle assessment. Environ. Sci. Technol. 2010, 44(8), 3169–3174. [Google Scholar] [CrossRef]
- Beloin-Saint-Pierre, D.; et al. Dynamic life cycle assessment framework. J. Clean. Prod. 2014, 79, 184–194. [Google Scholar] [CrossRef]
- Shimako, A.H.; Tiruta-Barna, L.; Benetto, E. Dynamic LCA applied to energy systems. J. Clean. Prod. 2017, 150, 198–207. [Google Scholar] [CrossRef]
- Azevedo, I.; et al. Marginal emissions factors and time-varying electricity carbon intensity. Energy Policy 2019, 129, 54–64. [Google Scholar] [CrossRef]
- Zimmermann, T.; et al. Carbon-aware scheduling for energy-intensive systems. Nat. Energy 2021, 6, 683–691. [Google Scholar] [CrossRef]
- Li, M.; et al. Carbon-aware charging and mobility systems. Transp. Res. Part C 2022, 137. [Google Scholar] [CrossRef]
- Egilmez, G.; et al. A simulation-based decision support model for sustainable transportation operations. J. Clean. Prod. 2021. [Google Scholar]
- Bertolini, M.; et al. AI-based decision support systems in transportation: A review. Comput. Ind. Eng. 2021. [Google Scholar]
- Gössling, S. Why cities need to take e-scooters seriously. Transport Rev. 2020. [Google Scholar]
- Cucuzzella, C.; et al. Temporal challenges in life cycle assessment: From dynamic to adaptive modeling. Sustainability 2022. [Google Scholar]
Figure 1.
Overview of the proposed carbon-aware system architecture for shared e-scooter operations.
Figure 1.
Overview of the proposed carbon-aware system architecture for shared e-scooter operations.
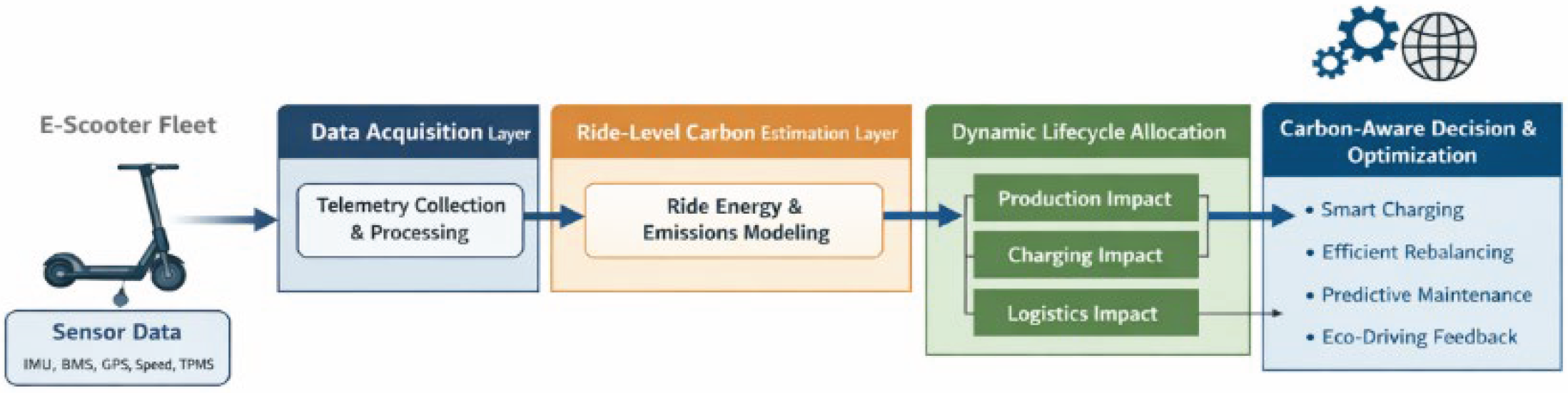
Figure 1.
Carbon-Aware Operational Flow.
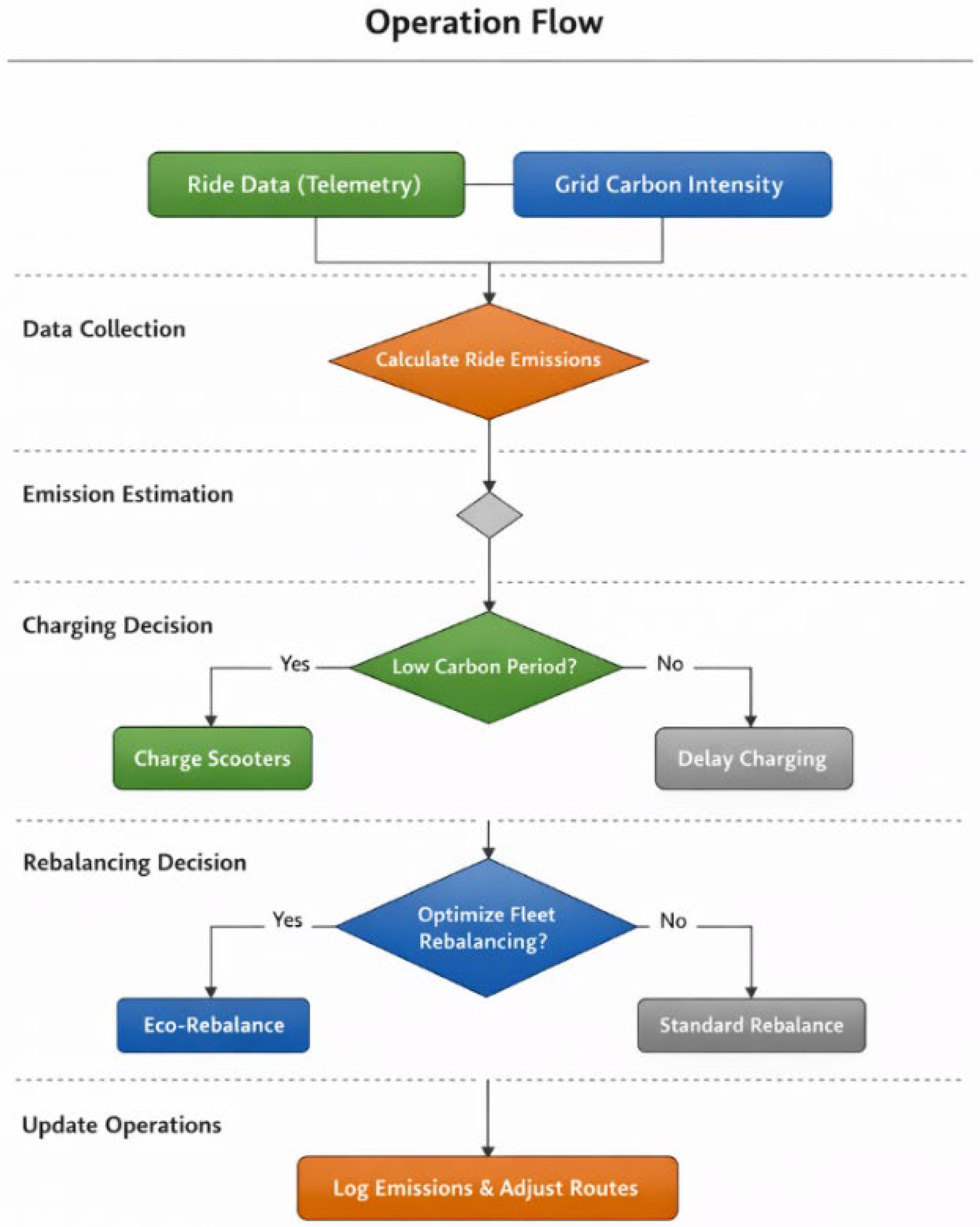
Figure 2.
Distribution of Ride-Level Emissions – Control vs. Carbon-Aware Scenarios.
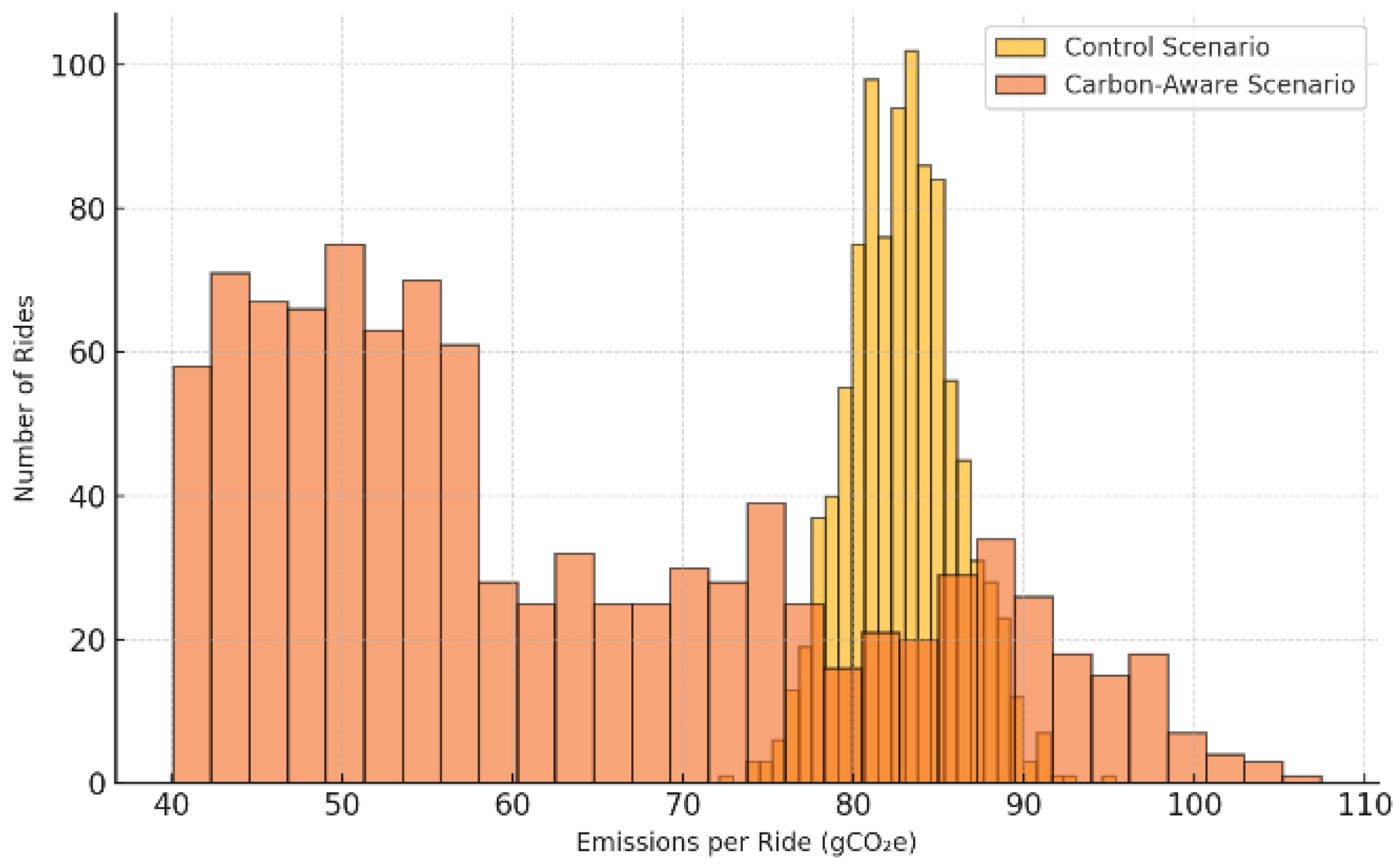

Table 1.
Overview of experimental groups and evaluation dimensions.
| Dimension | Control Group | Treatment Group |
|---|---|---|
| Operational strategy | Baseline operational practices | Carbon-aware operational strategies |
| Charging schedule | Conventional time-based charging | Carbon-aware charging based on grid intensity |
| Rebalancing | Standard rebalancing operations | Carbon-aware and combined rebalancing |
| Carbon metrics used | Not explicitly considered | Integrated into operational decisions |
| Telemetry availability | Standard fleet telemetry | Identical telemetry with carbon-aware processing |
Table 2.
Simulation Results – Summary Comparison.
| Metric | Control | Treatment |
|---|---|---|
| Avg. Emissions per Ride (gCO₂e) | 82.8 | 62.5 |
| Total Emissions (kg CO₂e) | 82.8 | 62.5 |
| Emission Reduction (%) | – | 24.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



