Submitted:
27 January 2026
Posted:
27 January 2026
You are already at the latest version
Abstract
This work investigates a mechanism for topology-altering geometric behavior induced by angular group actions within the framework of the Alpha Group, demonstrating that a systematic angular sweep can drive spontaneous transitions between Riemannian-like and sub-Riemannian regimes. Motivated by the group-theoretic foundations of geometry established by the Göttingen school and by the central role of invariants in topology, we introduce a setting in which geometric organization emerges from the interplay between an invariant, idempotent operator µ and an angular matrix M(θ ). While µ provides a stable structural background, the angular action associated with M(θ ) induces anisotropy and directional dependence. A systematic angular sweep is performed to probe the geometric response of the in- duced structure, revealing the spontaneous emergence of distinct isotropic, moderate, and strong regimes. These regimes are not imposed a priori, but arise dynamically from the interaction between the invariant background and the angular action. As the angular pa- rameter departs from stable configurations, anisotropic effects activate a sub-Riemannian Carnot–Carathéodory geometric framework, leading to a qualitative reorganization of the underlying topology. The strong regime is characterized by localized and persistent geometric features, ac- tivated only within bounded angular intervals and producing symmetric bifurcation pat- terns around θ = 90◦ . Despite these anisotropic reorganizations, global coherence and connectivity are preserved by the invariant action of µ. These results demonstrate that sub-Riemannian geometry can act as a natural driver of dynamic topological restructur- ing within group-based geometric frameworks, providing a coherent alternative to classical Riemannian descriptions.
Keywords:
alpha group
; Sub-Riemannian geometry
; Carnot–Carathéodory
; topological dynamics
; symmetry and antisymmetry
; tensorial metrics
; emergent geometry
1. Introduction
The development of modern geometry is deeply rooted in the program initiated by the Göttingen school at the end of the nineteenth century, most notably through the work of Felix Klein [9]. By placing transformation groups at the center of geometric reasoning, Klein’s Erlangen Program established the idea that geometric structures should be classified and understood through their invariants under group actions. This viewpoint not only unified previously disparate geometries but also introduced a powerful conceptual bridge between algebraic structures and geometric properties. This group-theoretic viewpoint proved fundamental for the emergence of topology as an autonomous discipline at the turn of the twentieth century. In his seminal work Analysis Situs, Poincaré introduced the systematic study of global invariants capable of distinguishing spaces beyond local geometric descriptions. This shift established topology as a framework concerned with qualitative and structural properties preserved under continuous deformations, reinforcing the central role of invariants in the geometric analysis of space [13].
Throughout the twentieth century, this group-theoretic perspective proved fundamental for the emergence of topology as an autonomous discipline. Invariants associated with group actions became central tools for characterizing global properties of spaces beyond local metric descriptions. Rather than focusing solely on distances or curvature, geometry increasingly relied on structural features preserved under admissible transformations, revealing deep connections between symmetry, topology, and dynamics.
Despite its success, the classical Riemannian paradigm remains intrinsically local and metrically oriented. While highly effective in describing smooth manifolds with fixed metric structures, it encounters conceptual limitations when confronted with spaces whose geometry exhibits intrinsic anisotropy, directional constraints, or dynamically evolving topological features. In such contexts, the underlying group structure plays a more fundamental role than the metric itself. In this broader geometric context, sub-Riemannian geometries naturally arise as a generalization of the classical Riemannian framework, allowing for spaces in which underlying structural distributions constrain admissible directions. In such geometries, distances and connectivity are defined not by arbitrary smooth paths, but by curves tangent to a prescribed subbundle of the tangent space. The resulting Carnot–Carathéodory metric captures intrinsic anisotropies and accessibility properties that cannot be described within a purely Riemannian setting [1,14].
From a group-theoretic perspective, sub-Riemannian Carnot–Carathéodory geometries are closely associated with nontrivial Lie algebra structures and naturally foliated spaces, where global connectivity emerges from constrained local motions. These geometries play a central role in contexts where symmetry, invariance, and directional dependence coexist, providing a mathematically rigorous framework for describing spaces whose topological organization is sensitive to anisotropic actions. In this sense, the sub-Riemannian viewpoint offers a natural language for analyzing topology-changing mechanisms induced by group actions beyond the Riemannian paradigm.
The Alpha Group is introduced in this work as a natural extension of the group-theoretic approach to geometry, designed to accommodate intrinsically anisotropic and dynamically structured spaces. Rather than prescribing a fixed metric a priori, the Alpha Group framework emphasizes the role of invariant operators and angular actions in shaping the geometric and topological organization of the space. The Alpha Group provides a geometric framework in which the metric is not imposed a priori but emerges from the combined action of the invariant operator and the angular matrix [3,5]. The resulting tensorial metric, denoted by , is defined through the quadratic form induced by the group action on an extended projective space. This metric exhibits explicit angular dependence and simultaneously captures an isotropic component associated with the invariance of and anisotropic contributions introduced by the angular action of .
In regimes of low anisotropy, the metric approaches a classical Riemannian structure. However, for critical angular configurations (), the metric becomes degenerate, signaling a transition to a sub-Riemannian regime governed by a Carnot–Carathéodory distribution. In this setting, geometric connectivity is no longer determined by unconstrained geodesics but instead by admissible curves that respect the directional constraints imposed by the emergent anisotropic structure. These constraints are naturally encoded in the tensorial form of the Alpha Group metric, reflecting the topological reorganization induced by the angular action.
Central to this construction is the operator , which is both idempotent and invariant under the Alpha Group action. The operator provides a stable structural background, acting as a geometric anchor that preserves coherence across parameter variations. Complementing this invariant structure, the angular matrix introduces a controlled, parameter-dependent action that induces anisotropy and directional dependence. The interplay between the invariant operator and the angular action associated with gives rise to nontrivial geometric responses and drives the sub-Riemannian mechanisms responsible for topological restructuring analyzed in this work. This work should be understood as a geometric and computational proof of concept, rather than a complete axiomatization of the Alpha Group. Its purpose is to isolate and analyze the core mechanisms by which angular group actions induce anisotropy and sub-Riemannian behavior, leaving a full axiomatic and four-dimensional formalization for future work.
2. Methodology
The matrix [2,3,5,6,7], with the main diagonal , represents the algebra of the Alpha group. The diagonal elements anchor the essence of each mode of the system with intrinsic propcapture the essence of each system mode, with intrinsic properties (including imaginary aspects and the real (rotation) and imaginary (distortion or bifurcation). The operator is not introduced ad hoc; it is naturally observed from the algebraic structure of the Alpha Group, emerging as a necessary direction imposed by the projective division operator.
The Alpha group matrix exhibits coherent dynamics associated with the fibers of its complex eigenvalues. At critical points
regular discontinuities, qualitative topological changes, and the emergence of dominant complex oscillatory solutions occur, organizing space coherently. As established in previous works on the Alpha Group [2,3,4,7], the operator emerges as an idempotent element () fundamental to the algebraic structure of the group, representing a projective point at infinity. Its presence, together with the elements 1, i, and , is required for the completeness of the projective division operation ⊘, which is realized through the matrix .
The primary focus is on the computational mechanisms and 2D metric projections. The methodology presented here builds directly on the sequence of prior publications that establish the theoretical foundations of the Alpha Group, which are cited throughout the text. This allows the current work to remain self-contained with respect to simulations and local analyses, while rigorous formal definitions can be found in the referenced articles. The angular matrix induces a continuous deformation of the underlying geometric structure of the Alpha Group. Rather than assuming a fixed metric background, we analyze the topology of the resulting space across varying levels of anisotropy controlled by .
To characterize the structural response, three qualitative regimes are considered. The isotropic regime corresponds to configurations in which the action of preserves approximate angular invariance, yielding a stable topological structure that acts as a global anchor. The moderate regime captures transitional configurations, where anisotropy is present but insufficient to stabilize persistent topological cycles. Finally, the strong regime corresponds to configurations in which anisotropy dominates, leading to the emergence of localized and persistent cycles within bounded angular intervals.
This regime-based classification is not imposed a priori. Still, it emerges naturally from the parameter-dependent action of and the observed stability properties of the resulting topological features.
Matrix admits a unique decomposition into a symmetric matrix and an antisymmetric matrix , given by
Accordingly, can be written as the sum of its symmetric and antisymmetric components.
2.1. Minimal Algebraic Description of the Alpha Group
The Alpha Group is an algebraic structure generated by the set
where and is an idempotent and invariant operator satisfying
The element is not introduced ad hoc but arises naturally from the closure requirements of the projective division operator that defines the internal algebra of the group. The inclusion of the elements ensures algebraic completeness and stability under the Alpha Group action.
The group action is represented by an angular matrix , whose structure couples real, imaginary, and projective components. The imaginary unit i encodes rotational or oscillatory behavior, while the idempotent operator acts as a projective anchor preserving global coherence across parameter variations. The angular parameter controls the anisotropic deformation induced by the group action. At critical values , the induced metric becomes degenerate, signaling a transition from a Riemannian-like regime to a sub-Riemannian Carnot–Carathéodory structure, in which admissible directions are constrained by the algebraic distribution generated by the Alpha Group [2,3,4,7].
2.2. Computational Methodology
The computational analysis of the Alpha Group was carried out using a Python-based numerical scan conceptually grounded in the angular matrix . For each angular parameter value in the range , the induced local geometric response was evaluated across a two-dimensional Cartesian grid of resolution. The analysis was conducted by performing an angular sweep associated with on a two-dimensional grid of size. Typical resolutions of and were tested to ensure convergence of the results. The geometric interpretation of the three regimes identified in this sweep. The isotropic regime exhibits a dominant and stable central peak, acting as a structural anchor, while the moderate and strong regimes display parameter-dependent activation with symmetric bifurcation around . This pattern reveals a non-Riemannian, dynamically foliated space with emergent topological cycles.
Although the Alpha Group is formally defined in a four-dimensional space with a matrix whose elements are , the present simulation employs a projected tensor G in the plane defined by coordinates . This tensor can be interpreted as a local slice or tangent plane of the full 4D metric, capturing essential anisotropic features relevant for regime detection while remaining computationally tractable.
The components of the effective 2D tensor are defined as:
where is a damping coefficient introduced to regulate the asymptotic growth of in the neighborhood of , preventing numerical dominance while preserving the qualitative anisotropic response induced by the angular action. The off-diagonal component thus introduces an explicit angular dependence consistent with the projected anisotropic effects of the 4D Alpha Group metric. This choice ensures:
- 1.
- Positivity:, maintaining a well-defined local metric.
- 2.
- Symmetry:, preserving the symmetric property of the metric tensor.
- 3.
- Smoothness: continuous variation with respect to , and , reflecting gradual changes in local anisotropy.
For each tensor G, eigenvalues are computed, and their ratio between the largest and smallest value is used as a diagnostic measure of local anisotropy. Near-degenerate eigenvalues indicate isotropic behavior, while increasing spectral separation signals activation of anisotropic patterns. The classification into isotropic, moderate, and strong regimes emerges dynamically from these spectral ratios, without being imposed a priori. The total number of points belonging to each regime is aggregated for every , producing global angular profiles that describe the distribution of isotropic and anisotropic responses across the domain. This methodology provides a qualitative measure of geometric restructuring and regime transitions induced by the angular action associated with . The 2×2 submatrix extracted from the upper-left corner of the full matrix is real and directly captures the properties of the system’s original 2D metric.
2.3. Connection to 4D Alpha Group
In our analysis, we focus on the submatrix extracted from the upper-left corner of the full matrix . This submatrix is real and directly captures the properties of the system’s original 2D metric. The rationale for using this submatrix instead of the full matrix is to simplify the problem while preserving the essential geometric information, as the tangent function embedded in inherently encodes the topological deformation occurring in the four-dimensional space. Consequently, the 2D tensor G serves as a faithful projection of onto a local tangent plane, allowing the same eigenvalue-based classification to capture regime transitions—Isotropic, Moderate, and Strong—while maintaining conceptual consistency with the full 4D structure. While the current implementation relies on this 2D projection, the methodology is directly extendable to the full 4D metric, where defines a matrix whose elements encode sub-Riemannian anisotropy and topological structure. Future generalizations may incorporate the complete matrix and evaluate spectral measures over all four dimensions, enabling comprehensive topological and sub-Riemannian analyses while retaining the core methodology established here. Although the Alpha Group is formally defined through a full angular matrix , the direct use of the complete four-dimensional structure introduces substantial technical and computational complexity. Following a standard scientific strategy, we therefore begin with the simplest nontrivial case that preserves the essential geometric mechanisms induced by the group action. The two-dimensional projection employed in this work should be understood as a local tangent slice of the full structure, rather than as an arbitrary dimensional reduction.
This projected setting is technically correct and sufficient to capture the qualitative transition from isotropic to anisotropic behavior driven by the angular parameter . In particular, it faithfully reflects the emergence of degeneracies, directional constraints, and regime transitions associated with the activation of a sub-Riemannian Carnot–Carathéodory framework. As such, the 2D model provides an adequate and conceptually sound approximation, serving as a scalable foundation for future extensions to the complete four-dimensional formulation. The two-dimensional setting adopted in this work should therefore be understood as a local tangent slice of the full four-dimensional Alpha Group structure, rather than as a dimensional reduction in the physical sense. As such, it faithfully captures the qualitative mechanisms of anisotropy, degeneracy, and regime transitions induced by the angular action of , while remaining computationally tractable.
2.4. Numerical Stability Considerations
The off-diagonal component of the projected 2D metric,
introduces angular-dependent anisotropy. Near , diverges, potentially leading to large eigenvalue ratios and numerical instability.
To ensure robust computations, the implementation applies:
- Clipping of extreme values to a maximum threshold ,
- A small threshold to avoid division by zero in cotangent operations,
- Careful handling of singularities to preserve qualitative behavior while preventing overflow or NaN values.
This ensures that the observed peaks in the strong anisotropic regime accurately reflect intrinsic geometric properties, rather than numerical artifacts, while maintaining stability across the angular scan.
3. Results
The analysis was conducted by performing an angular sweep associated with , which revealed three distinct regimes. Figure 1 illustrates the geometric interpretation of these regimes. In the isotropic regime, the structure is dominated by the invariant action of the operator , while the angular contribution associated with does not induce effective anisotropy. In this case, the geometry remains effectively isotropic, and no sub-Riemannian behavior is activated. As the angular parameter moves away from this stable configuration, a moderate regime emerges in which anisotropic effects begin to act on the space. The angular dependence induced by introduces directional constraints on admissible geometric paths, naturally leading to an interpretation in terms of a sub-Riemannian Carnot–Carathéodory geometry. Such directional constraints are characteristic of sub-Riemannian Carnot–Carathéodory geometries [1,12,14]. In this transitional regime, the invariant background induced by still governs the global organization, preventing the stabilization of persistent topological features.
In contrast, the strong regime is characterized by the dominance of the anisotropic action associated with over the stabilizing background induced by . The angular dependence enforces a foliated geometric structure, fully activating a sub-Riemannian Carnot–Carathéodory framework. This reorganization leads to the emergence of localized and persistent geometric features, observed only within bounded angular intervals, and produces symmetric bifurcation patterns around . Despite this anisotropic restructuring, the space remains globally connected and coherent. In the sub-Riemannian framework of the Alpha Group, the metric does not allow arbitrary displacements in all directions. The angular matrix introduces anisotropy, meaning that certain directions are "preferential" or "admissible," while others are not directly accessible at an infinitesimal local level. In Figure 1, the Alpha Group exhibits dynamic foliation rather than a static Riemannian structure. The symmetry indicates that topological restructuring follows consistent group laws, with isotropy loss compensated by the Carnot–Carathéodory framework. Nonetheless, under Hörmander’s condition, any point in the space can be reached from any other by following trajectories tangent to the admissible directions, ensuring that a path always exists despite the local constraints.
Numerical tests on the Alpha Group, based on the angular matrix and the associated horizontal distribution of generators, indicate that the bracket-generating (Hörmander) condition is satisfied over a broad range of angular values, with the generated Lie algebra attaining ranks between 4 and 6. These results support the existence of a sub-Riemannian geometric structure with full controllability in the analyzed angular regimes [10].
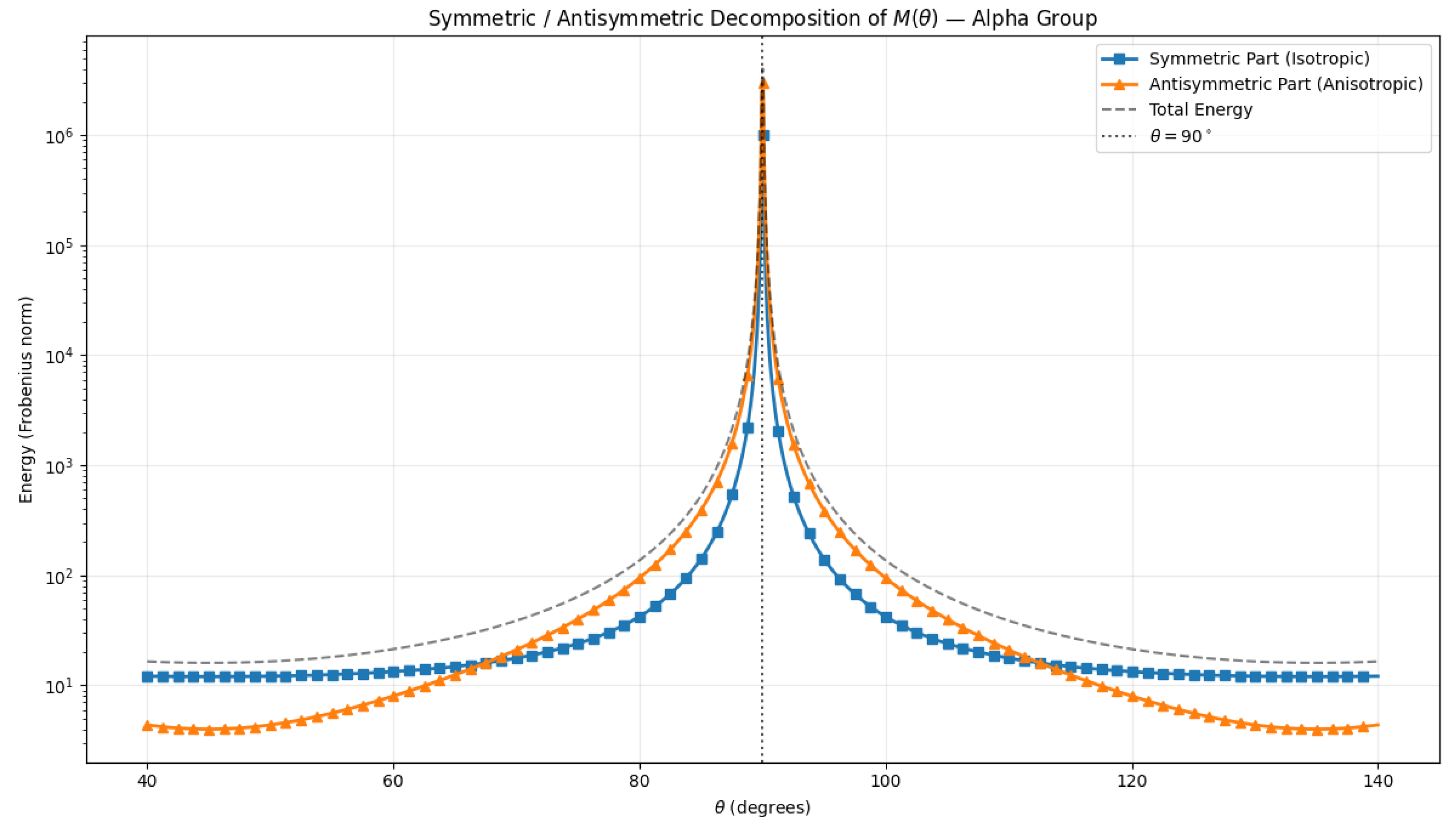
Figure 2 illustrates the symmetric and antisymmetric decomposition of the angular matrix associated with the Alpha Group, quantified through the Frobenius norm of each component. The Frobenius norm is adopted as a global, basis-independent measure of matrix magnitude [11]. The analysis reveals a clear and structured dependence on the angular parameter , with a pronounced symmetry around . Using the Frobenius norm as a global measure, variations in and reflect redistributions between isotropic and anisotropic structural components, rather than changes in the underlying group. The dominance of the antisymmetric sector therefore signals a genuine geometric phase transition within the same invariant algebraic framework. To quantify the relative contribution of the symmetric and antisymmetric components of the angular matrix , we employ the Frobenius norm. For a matrix , the Frobenius norm is defined as
This norm provides a natural, basis-independent measure of the global magnitude of a matrix and is particularly well suited for comparing the energetic weight of different structural components. In the present context, the Frobenius norm is interpreted as a global structural energy associated with each sector of , allowing a direct comparison between the symmetric and antisymmetric contributions without imposing any additional metric assumptions.
4. Conclusion
In this work, we have examined how topological restructuring can emerge from angular group actions within the framework of the Alpha Group. Building on the group-theoretic foundations established by the Göttingen school and on the central role of invariants in geometry and topology, the proposed approach emphasizes the interplay between an invariant, idempotent operator and a parameter-dependent angular matrix .
The operator provides a stable geometric background that preserves global coherence, while the angular action associated with introduces anisotropy and directional constraints. A systematic angular scan reveals the emergence of isotropic, moderate, and strong regimes, which are not imposed a priori but arise dynamically from the interaction between invariance and angular deformation. As anisotropic effects intensify, the geometry naturally transitions toward a sub-Riemannian Carnot–Carathéodory framework, leading to qualitative reorganization beyond the scope of classical Riemannian models.
The strong regime is characterized by localized and persistent geometric features activated only within bounded angular intervals, producing symmetric bifurcation patterns around . Despite these anisotropic reorganizations, global connectivity remains preserved by the invariant action of . Numerical tests performed on the Alpha Group generators indicate that the bracket-generating (Hörmander) condition is satisfied, with the generated algebra reaching effective step sizes between four and six. These results confirm that the Alpha Group behaves as a dynamically foliated space rather than a conventional Riemannian manifold. The observed symmetry at highlights the underlying group-theoretic principles, where isotropy loss is balanced by the Carnot–Carathéodory structure, ensin which isotropy loss is balanced by the Carnot–Carathéodory structure, thereby ed in a four-dimensional setting, the projected two-dimensional analysis employed in this work is sufficient to capture the essential anisotropic mechanisms and to classify the system into three regimes: isotropic, moderate, and strong. Direct tests performed in the complete four-dimensional space confirm that the same qualitative behavior is observed, thereby reinforcing the validity of the projective approach.
While the Alpha Group is natively four-dimensional, the full interaction of the sixteen terms of the matrix introduces significant computational complexity that lies beyond the scope of this initial proof of concept. The two-dimensional projection isolates the fundamental mechanism—namely, the angular dependence of the induced metric—allowing for a clear characterization of the geometric regimes without the algebraic overhead of the complete structure, which will be addressed in a dedicated future study. The results presented in this work demonstrate that the symmetric and antisymmetric sectors of the Alpha Group do not correspond to distinct geometric frameworks, but rather to complementary phases of a single underlying group structure. In the symmetric sector, the dominance of isotropic contributions leads naturally to a Riemannian geometric regime, characterized by locally unconstrained directions and metric regularity. Conversely, when the antisymmetric sector becomes dominant, the geometry transitions to a sub-Riemannian Carnot–Carathéodory regime, in which directional constraints and anisotropic distributions govern admissible paths. Importantly, this transition does not alter the group itself, whose invariant structure remains preserved, but instead reflects a redistribution between its internal sectors driven by the angular parameter. In this sense, Riemannian and sub-Riemannian geometries emerge as phase realizations of the same Alpha Group, providing a unified Erlangen-type framework in which geometric diversity arises from a single algebraic origin.
The numerical scripts used for these analyses, including the Hörmander tests, are made available through a public GitHub repository.
Code Availability
All source code and scripts utilized in this study are publicly accessible at the following GitHub repository [8]: https://github.com/CleberCorrea15.
References
- Bellaïche, A. “The tangent space in sub-Riemannian geometry,” in Sub-Riemannian Geometry. In Progress in Mathematics; Birkhäuser, 1996; Vol. 144, pp. 1–78. [Google Scholar]
- Corrêa, C. S.; de Melo, T. B.; Custodio, D. M. Proposing the Alpha Group. International Journal for Research in Engineering Application & Management (IJREAM) 2022, 8(5). [Google Scholar]
- Corrêa, C. S.; de Melo, T. B.; Custodio, D. M. The Alpha Group Tensorial Metric. Revista Brasileira de História da Matemática (RBHM);arXiv [math.DG. 2024, arXiv:2507.1695424(48), 78–84. [Google Scholar] [CrossRef]
- Corrêa, C. S.; de Melo, T. B. N. Division as a radial vector relationship – Alpha group. Studies in Engineering and Exact Sciences 2025, 6(1), e16083. [Google Scholar] [CrossRef]
- Corrêa, C. S.; de Melo, T. B. N. The Alpha Group Dynamic Mapping . arXiv. 2025. Available online: https://arxiv.org/abs/2507.18303.
- Corrêa, C. S.; de Melo, T. B. The Alpha Group 4D geometry: Symmetric structures and topological transitions. hal-05208302. 2025. Available online: https://hal.science/hal-05208302.
- Cleber Souza Corrêa and Thiago Braido Nogueira de Melo, Topological Differences between Riemann Geometry and the Alpha Group via Graph Methods, 2025, hal-05281857 .
- Corrêa, C. S. The-Alpha-group: Numerical Simulations and Data, GitHub repository, 2025. Available at: https://github.com/CleberCorrea15/The-Alpha-group .
- Klein, F. Vergleichende Betrachtungen über neuere geometrische Forschungen . In Erlangen Program; 1893. [Google Scholar]
- Hörmander, L. Hypoelliptic second order differential equations . Acta Mathematica 1967, vol. 119, 147–171. [Google Scholar] [CrossRef]
- Horn, R. A.; Johnson, C. R. Matrix Analysis, 2nd ed.; Cambridge University Press: Cambridge, 2013. [Google Scholar]
- Gromov, M. “Carnot–Carathéodory spaces seen from within,” in Sub-Riemannian Geometry. In Progress in Mathematics; Birkhäuser, 1996; Vol. 144, pp. 79–323. [Google Scholar]
- Poincaré, H. Analysis Situs. Journal de l’École Polytechnique Vol. 1(1895), 1–121.
- R. Montgomery, A Tour of Subriemannian Geometries, Their Geodesics and Applications, Mathematical Surveys and Monographs, Vol. 91, American Mathematical Society, 2002.
Figure 1.
Angular scanning of the Alpha Group topology in the range . The isotropic regime exhibits a dominant and stable central peak, acting as a structural anchor, while the moderate and strong regimes display parameter-dependent activation with symmetric bifurcation around . This pattern reveals a non-Riemannian, dynamically foliated space with emergent topological cycles.
Figure 1.
Angular scanning of the Alpha Group topology in the range . The isotropic regime exhibits a dominant and stable central peak, acting as a structural anchor, while the moderate and strong regimes display parameter-dependent activation with symmetric bifurcation around . This pattern reveals a non-Riemannian, dynamically foliated space with emergent topological cycles.
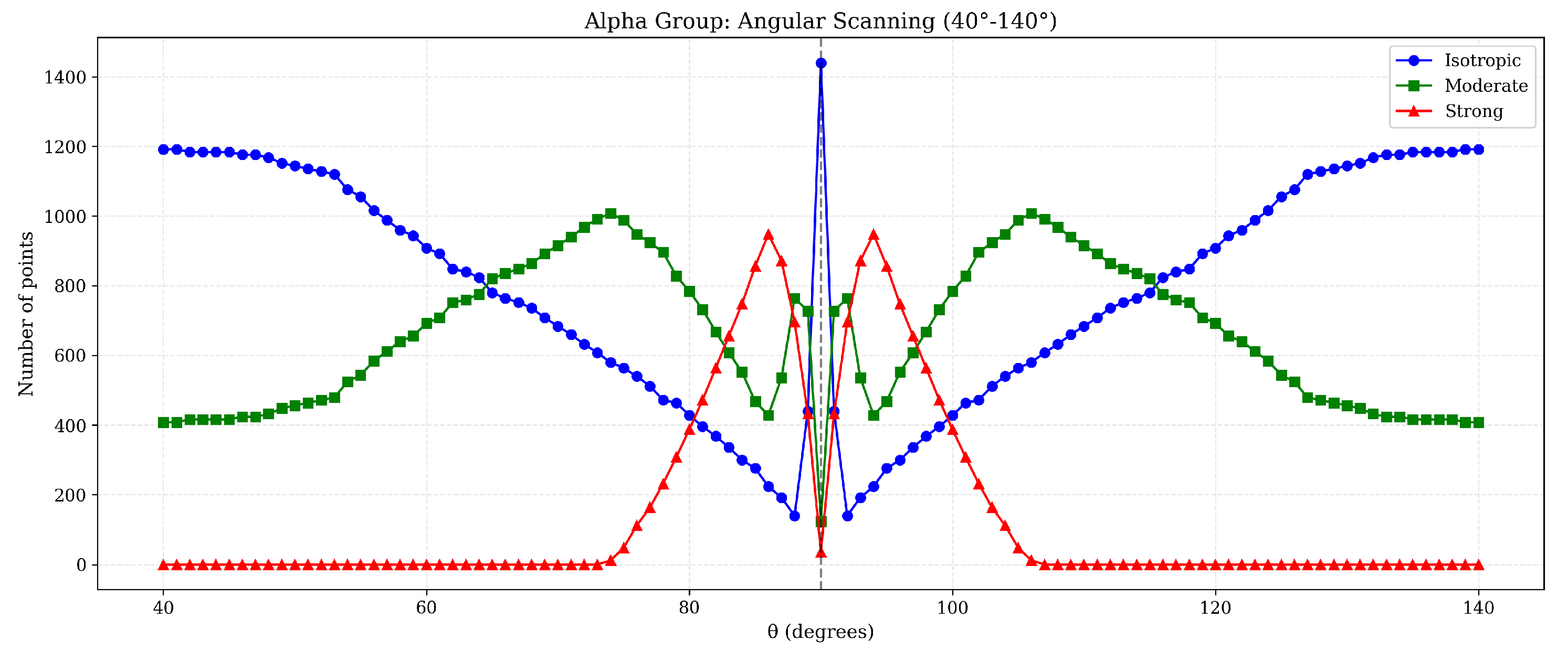
Figure 2.
Full 16-term matrix representation of the Alpha Group operator, showing the dominance transition from the symmetric to the antisymmetric sector as the angular parameter exceeds approximately . The group structure remains invariant, while the prevailing geometric phase changes.
Figure 2.
Full 16-term matrix representation of the Alpha Group operator, showing the dominance transition from the symmetric to the antisymmetric sector as the angular parameter exceeds approximately . The group structure remains invariant, while the prevailing geometric phase changes.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



