Submitted:
05 January 2026
Posted:
07 January 2026
You are already at the latest version
Abstract
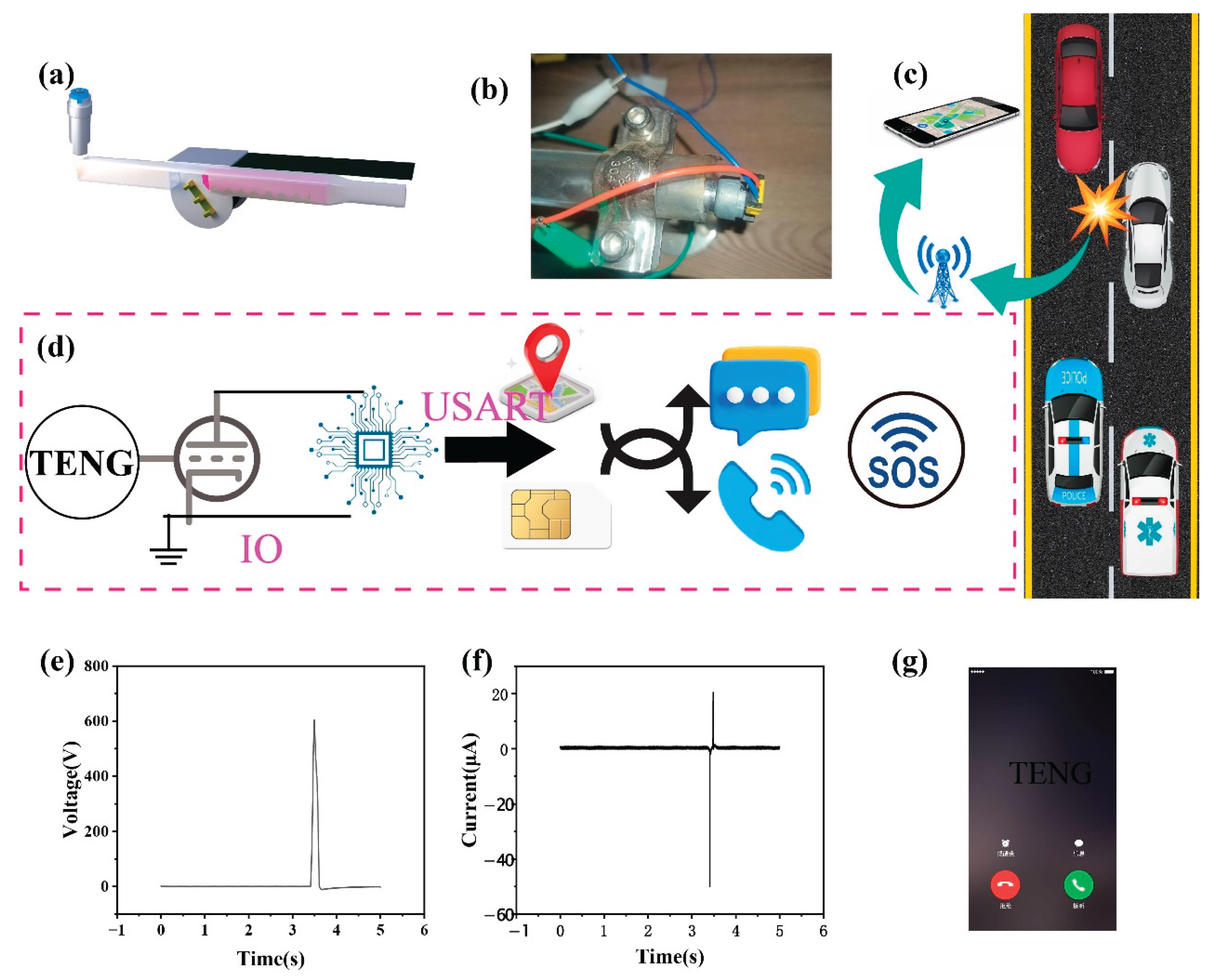
Triboelectric nanogenerator (TENG) have gradually been applied in various practical scenarios, mainly focusing on core areas such as wearable motion monitoring devices, medical security systems, and natural resource exploration technology. However, it has the problem of low output energy and has not yet formed effective integration with mature commercially available products, which has hindered the industrialization process. This situation still significantly limits its global promotion and application. In this study, TENG was used as the sensing module for intelligent automotive airbags. We conducted tests on the voltage and current output characteristics of the system under different impact forces and frequency conditions. During the testing process, the electrical energy generated under different operating conditions is transmitted to the control system through Metal-Oxide-Semiconductor Field-Effect Transistor (MOSFET) circuits. The system will quickly determine whether to trigger the airbag deployment based on the received electrical signals, and activate the ignition device when necessary to achieve rapid inflation and deployment of the airbag. Compared with traditional triggering mechanisms, the airbag system based on this designed sensor has higher sensitivity and reliability. The sensor can stably capture collision signals, and experiments have shown that as the collision speed increases, the slope of its open circuit voltage gradually approaches infinity. Applying TENG to automotive airbags not only effectively improves the triggering efficiency and accuracy of airbags, but also provides more reliable safety protection for drivers and passengers. The finite element simulation of vehicle airbags provides specific data support for safety performance evaluation. With the continuous advancement of TENG technology and further expansion of its application scenarios, we believe that such innovative safety technologies will play a more critical role in the future automotive industry.
Keywords:
1. Introduction
2. Result and Discussion
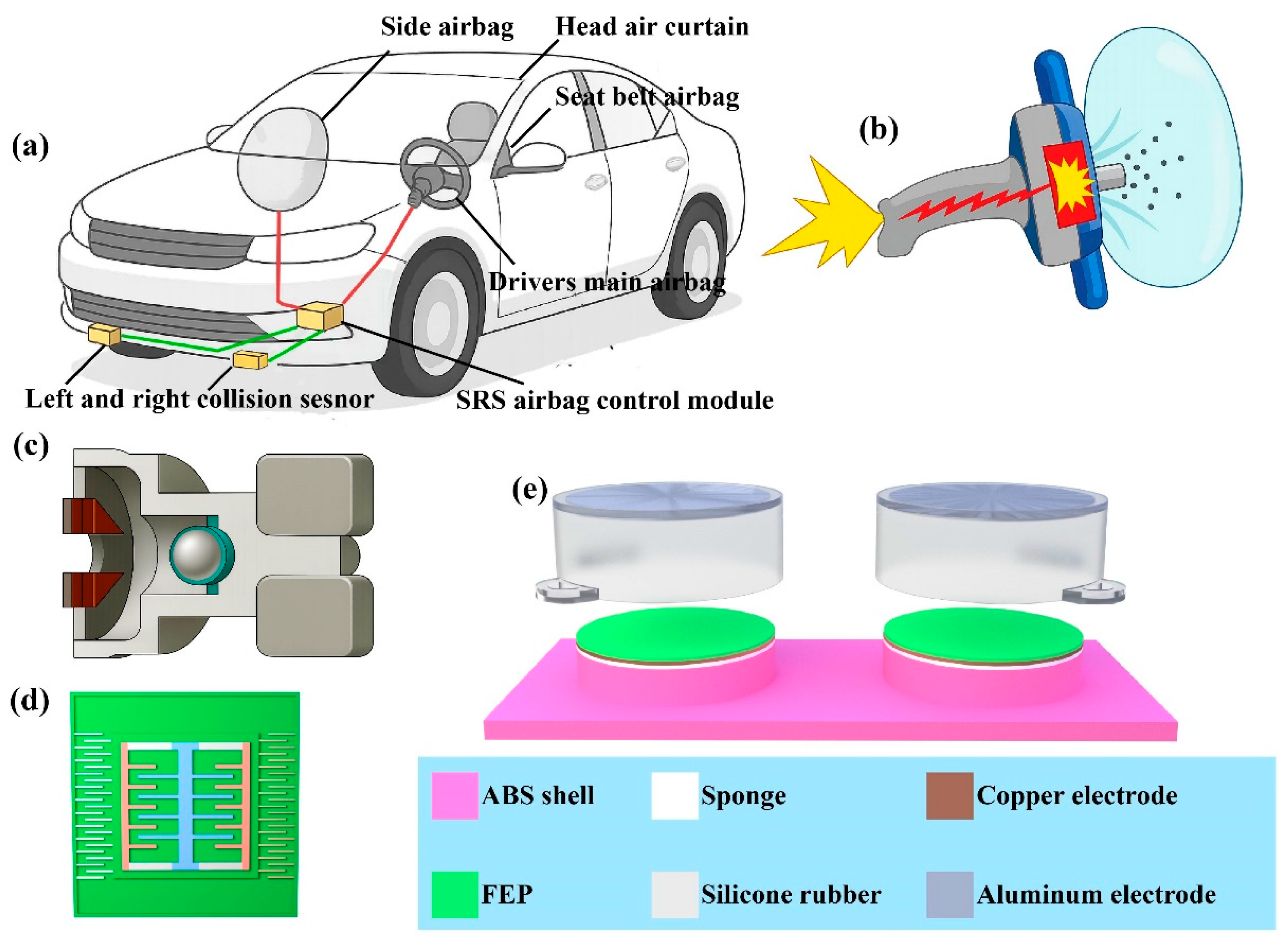
2.1. Structural Design
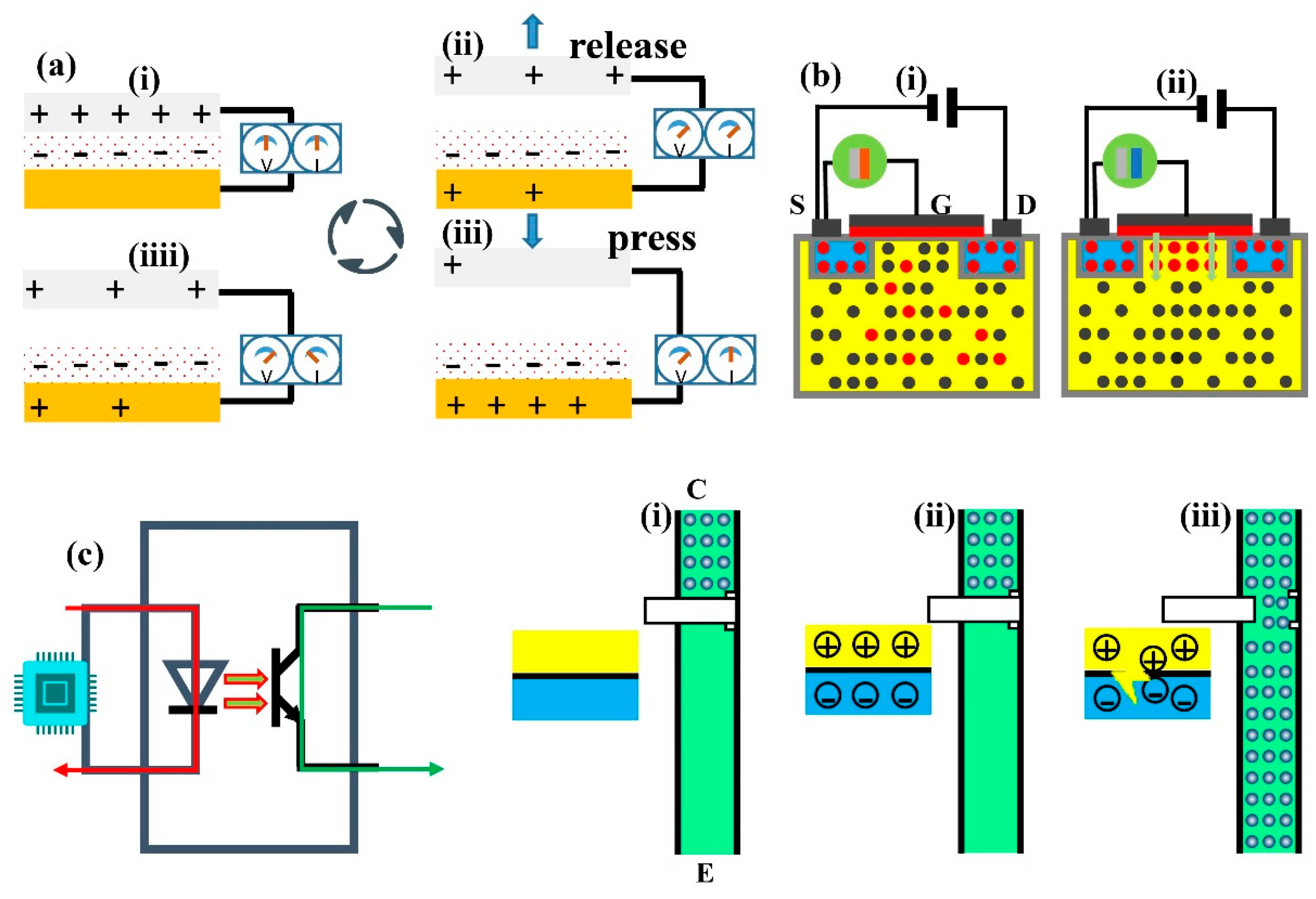
2.2. Mechanism of System Modules
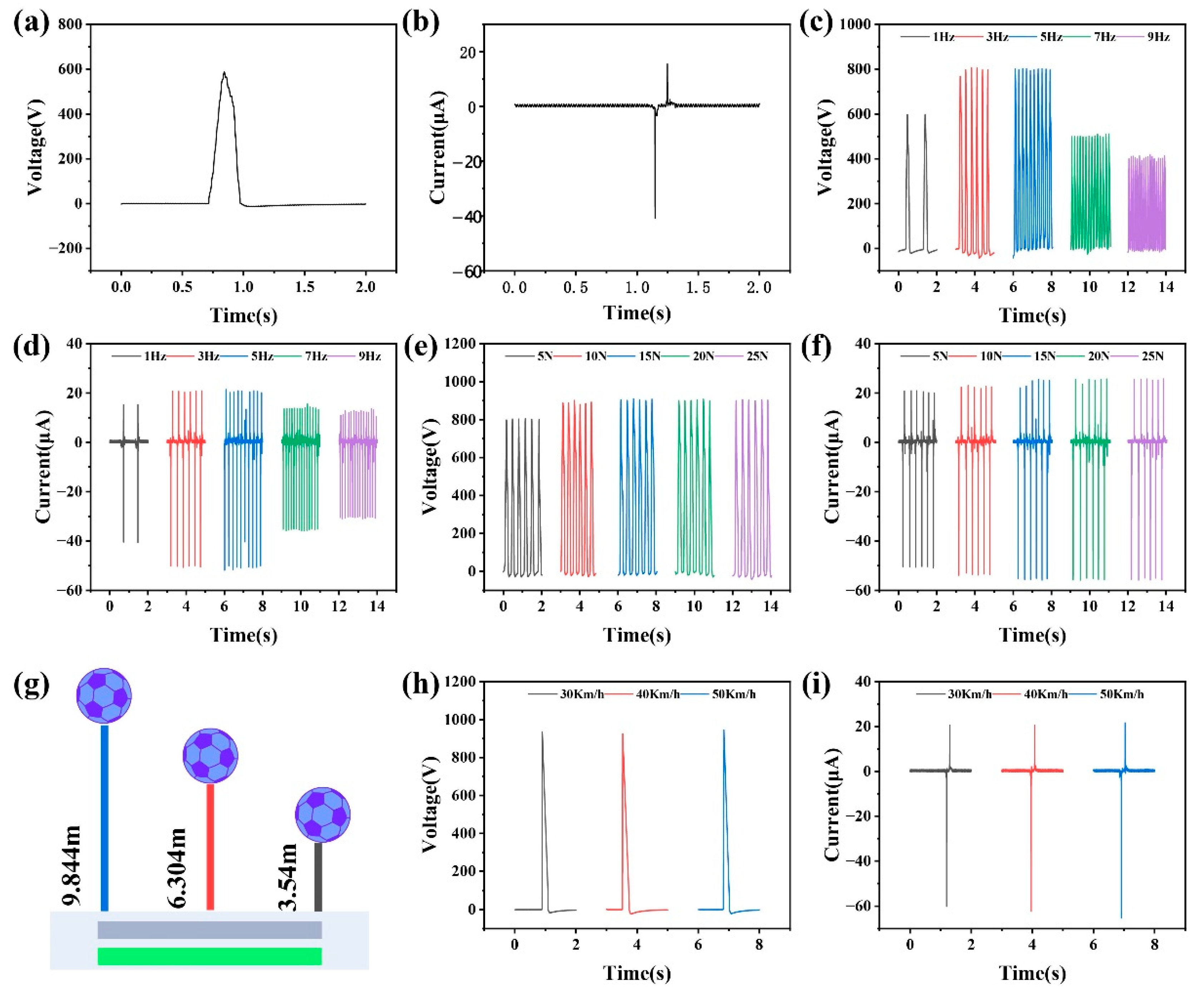
2.3. Output Characteristics of TENG Power
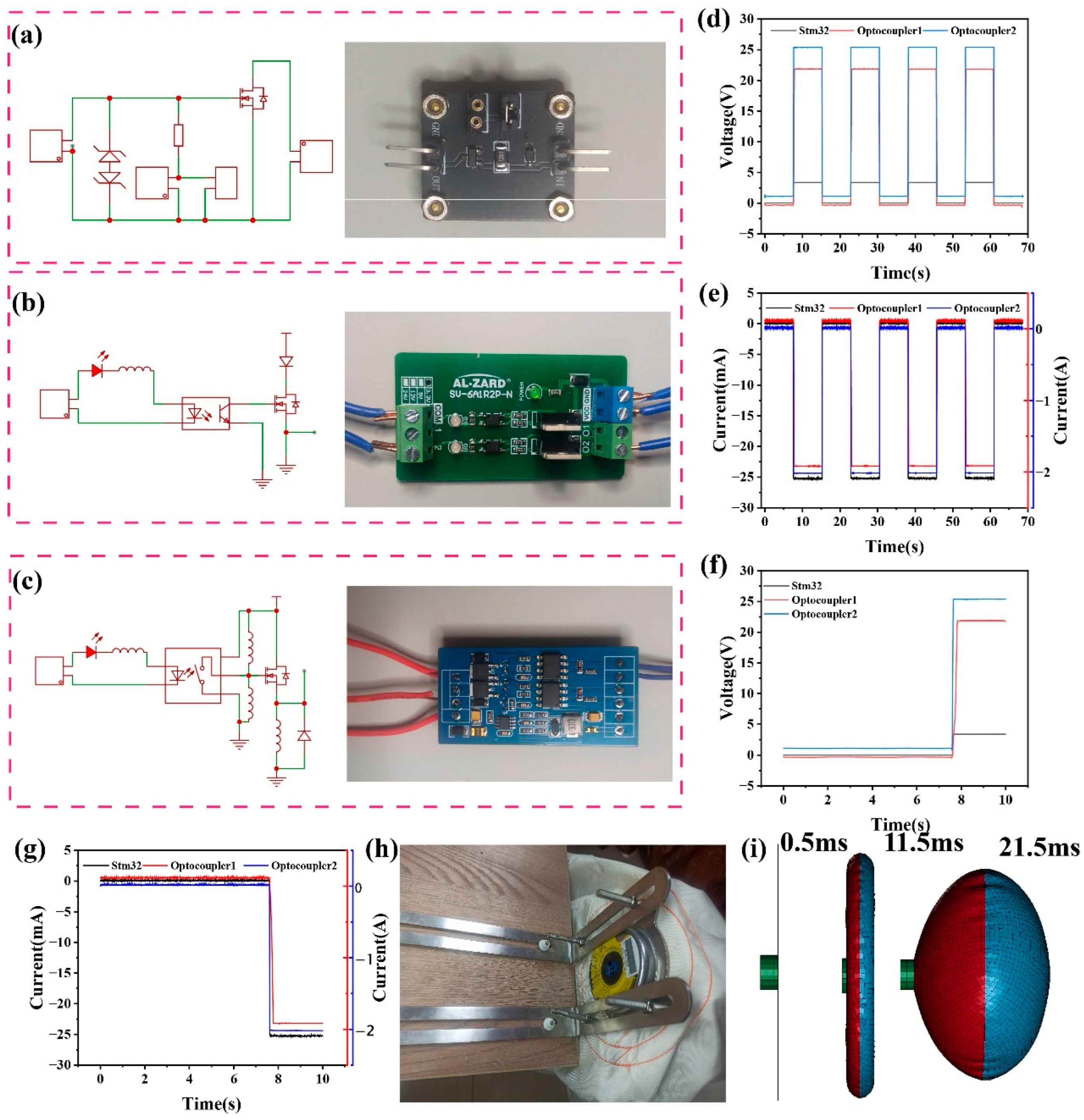
2.4. Application of Automotive Airbags Under the Verification and Selection of Optocouplers
2.5. Application of IoT Alarm
3. Conclusions
4. Experimental Section
References
- Parkinson, S.; Ward, P.; Wilson, K.; Miller, J. Cyber Threats Facing Autonomous and Connected Vehicles: Future Challenges. IEEE Transactions on Intelligent Transportation Systems 2017, 18((11)), 2898–2915. [Google Scholar] [CrossRef]
- Siegel, J. E.; Erb, D. C.; Sarma, S. E. A Survey of the Connected Vehicle Landscape—Architectures, Enabling Technologies, Applications, and Development Areas. IEEE Transactions on Intelligent Transportation Systems 2018, 19((8)), 2391–2406. [Google Scholar] [CrossRef]
- Van Brummelen, J.; O’Brien, M.; Gruyer, D.; Najjaran, H. Autonomous vehicle perception: The technology of today and tomorrow. Transportation Research Part C: Emerging Technologies 2018, 89, 384–406. [Google Scholar] [CrossRef]
- Chen, F.; Lu, G.; Lin, Q.; Zhai, J.; Tan, H. Are novice drivers competent to take over control from level 3 automated vehicles? A comparative study with experienced drivers. Transportation Research Part F: Traffic Psychology and Behaviour 2021, 81, 65–81. [Google Scholar] [CrossRef]
- Eskandarian, A.; Wu, C.; Sun, C. Research Advances and Challenges of Autonomous and Connected Ground Vehicles. IEEE Transactions on Intelligent Transportation Systems 2021, 22((2)), 683–711. [Google Scholar] [CrossRef]
- Li, S.; Zhang, Y.; Blythe, P.; Edwards, S.; Ji, Y. Remote driving as the Failsafe: Qualitative investigation of Users’ perceptions and requirements towards the 5G-enabled Level 4 automated vehicles. Transportation Research Part F: Traffic Psychology and Behaviour 2024, 100, 211–230. [Google Scholar]
- Zhao, W.; Ngoduy, D.; Shepherd, S.; Liu, R.; Papageorgiou, M. A platoon based cooperative eco-driving model for mixed automated and human-driven vehicles at a signalised intersection. Transportation Research Part C: Emerging Technologies 2018, 95, 802–821. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, Y.; Pu, Z.; Hu, J.; Wang, X.; Ke, R. Safe, efficient, and comfortable velocity control based on reinforcement learning for autonomous driving. Transportation Research Part C: Emerging Technologies 2020, 117. [Google Scholar]
- Li, G.; Yang, Y.; Li, S.; Qu, X.; Lyu, N.; Li, S. E. Decision making of autonomous vehicles in lane change scenarios: Deep reinforcement learning approaches with risk awareness. Transportation Research Part C: Emerging Technologies 2022, 134. [Google Scholar] [CrossRef]
- Mozaffari, S.; Al-Jarrah, O. Y.; Dianati, M.; Jennings, P.; Mouzakitis, A. Deep Learning-Based Vehicle Behavior Prediction for Autonomous Driving Applications: A Review. IEEE Transactions on Intelligent Transportation Systems 2022, 23((1)), 33–47. [Google Scholar] [CrossRef]
- Roriz, R.; Cabral, J.; Gomes, T. Automotive LiDAR Technology: A Survey. IEEE Transactions on Intelligent Transportation Systems 2022, 23((7)), 6282–6297. [Google Scholar]
- Zhang, H.; Lu, X.; Chen, F.; Gong, X.; Tan, H. Inference of takeover time budget for level 3 autonomous vehicles using triboelectric sensors and hybrid learning. Chemical Engineering Journal 2025, 515. [Google Scholar]
- Kim, D.-E.; Park, W.-I.; Shin, B.-S.; Kang, M. C. Optimized low-risk deployment of a passenger airbag with a passenger protection wrap considering pressure dispersion. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering 2016, 231((1)), 27–34. [Google Scholar] [CrossRef]
- Grebenişan, G.; Ionut Radu, A.; Cofaru, C.; Tolea, B.; Dima, D.; Pele, A. V. Study regarding the influence of airbag deployment time on the occupant injury level during a frontal vehicle collision. MATEC Web of Conferences 2018, 184. [Google Scholar]
- Shirur, N.; Birkner, C.; Henze, R.; Deserno, T. M. Tactile Occupant Detection Sensor for Automotive Airbag. Energies 2021, 14, 17. [Google Scholar] [CrossRef]
- Arjomandi Rad, M.; Cenanovic, M.; Salomonsson, K. Image regression-based digital qualification for simulation-driven design processes, case study on curtain airbag. Journal of Engineering Design 2023, 34((1)), 1–22. [Google Scholar]
- Dui, H.; Song, J.; Zhang, Y.-a. Reliability and Service Life Analysis of Airbag Systems. Mathematics 2023, 11((2)). [Google Scholar] [CrossRef]
- Mohd Yasin, S. B.; Terry, J. S.; Taylor, A. C. Fracture and mechanical properties of an impact toughened polypropylene composite: modification for automotive dashboard-airbag application. RSC Adv 2023, 13((39)), 27461–27475. [Google Scholar] [PubMed]
- Wang, Y.; Wang, Y.; Liu, X.; Wang, X.; Dai, K.; You, Z. Self-Powered Microsystem for Ultra-Fast Crash Detection via Prestressed Triboelectric Sensing. Research (Wash D C) 2025, 8, 0753. [Google Scholar] [CrossRef]
- Ghemari, Z.; Saad, S. Piezoresistive Accelerometer Mathematical Model Development With Experimental Validation. IEEE Sensors Journal 2018, 18((7)), 2690–2696. [Google Scholar] [CrossRef]
- Lu, X.; Li, H.; Zhang, X.; Gao, B.; Cheng, T. Magnetic-assisted self-powered acceleration sensor for real-time monitoring vehicle operation and collision based on triboelectric nanogenerator. Nano Energy 2022, 96. [Google Scholar]
- Nour, M.; Daldal, N.; Kahraman, M. F.; Sindi, H.; Alhudhaif, A.; Polat, K.; Deivanayagampillai, N. A Novel Tilt and Acceleration Measurement System Based on Hall-Effect Sensors Using Neural Networks. Mathematical Problems in Engineering 2022, 2022, 1–13. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Scudero, S.; Vitale, G. A Review of the Capacitive MEMS for Seismology. Sensors (Basel) 2019, 19((14)). [Google Scholar] [CrossRef]
- Guo, Y.; Zhang, Z.; Chang, L.; Yu, J.; Ren, Y.; Chen, K.; Cao, H.; Xie, H. Temperature Compensation for MEMS Accelerometer Based on a Fusion Algorithm. Micromachines (Basel) 2024, 15((7)). [Google Scholar] [CrossRef]
- Zhong, L.; Xue, L.; Deng, X.; Liu, S.; Zhu, Z. High Power-Efficiency Readout Circuit for MEMS Capacitive Accelerometer. IEEE Transactions on Circuits and Systems II: Express Briefs 2024, 71((1)), 76–80. [Google Scholar] [CrossRef]
- Wang, S.; Lin, L.; Wang, Z. L. Nanoscale triboelectric-effect-enabled energy conversion for sustainably powering portable electronics. Nano Lett 2012, 12((12)), 6339–46. [Google Scholar] [CrossRef]
- Zhu, G.; Pan, C.; Guo, W.; Chen, C. Y.; Zhou, Y.; Yu, R.; Wang, Z. L. Triboelectric-generator-driven pulse electrodeposition for micropatterning. Nano Lett 2012, 12((9)), 4960–5. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Zhu, G.; Yang, W.; Jing, Q.; Bai, P.; Yang, Y.; Hou, T. C.; Wang, Z. L. Harmonic-resonator-based triboelectric nanogenerator as a sustainable power source and a self-powered active vibration sensor. Adv Mater 2013, 25((42)), 6094–9. [Google Scholar] [CrossRef]
- Lin, L.; Wang, S.; Xie, Y.; Jing, Q.; Niu, S.; Hu, Y.; Wang, Z. L. Segmentally structured disk triboelectric nanogenerator for harvesting rotational mechanical energy. Nano Lett 2013, 13((6)), 2916–23. [Google Scholar] [CrossRef] [PubMed]
- Lin, Z. H.; Cheng, G.; Lin, L.; Lee, S.; Wang, Z. L. Water-solid surface contact electrification and its use for harvesting liquid-wave energy. Angew Chem Int Ed Engl 2013, 52((48)), 12545–9. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Zhou, Y. S.; Zhang, H.; Liu, Y.; Lee, S.; Wang, Z. L. A single-electrode based triboelectric nanogenerator as self-powered tracking system. Adv Mater 2013, 25((45)), 6594–601. [Google Scholar] [CrossRef]
- Zhu, G.; Lin, Z. H.; Jing, Q.; Bai, P.; Pan, C.; Yang, Y.; Zhou, Y.; Wang, Z. L. Toward large-scale energy harvesting by a nanoparticle-enhanced triboelectric nanogenerator. Nano Lett 2013, 13((2)), 847–53. [Google Scholar] [CrossRef]
- Lin, Z. H.; Cheng, G.; Lee, S.; Pradel, K. C.; Wang, Z. L. Harvesting water drop energy by a sequential contact-electrification and electrostatic-induction process. Adv Mater 2014, 26((27)), 4690–6. [Google Scholar] [CrossRef]
- Xie, Y.; Wang, S.; Niu, S.; Lin, L.; Jing, Q.; Yang, J.; Wu, Z.; Wang, Z. L. Grating-structured freestanding triboelectric-layer nanogenerator for harvesting mechanical energy at 85% total conversion efficiency. Adv Mater 2014, 26((38)), 6599–607. [Google Scholar] [CrossRef] [PubMed]
- Seung, W.; Yoon, H. J.; Kim, T. Y.; Kang, M.; Kim, J.; Kim, H.; Kim, S. M.; Kim, S. W. Dual Friction Mode Textile-Based Tire Cord Triboelectric Nanogenerator. Advanced Functional Materials 2020, 30, 39. [Google Scholar] [CrossRef]
- Park, H.-m.; Cho, Y.; Yoon, H.-J.; Ryu, H. Highly compact rotational triboelectric nanogenerator for self-powered BLE operation and self-rechargeable system. Chemical Engineering Journal 2025, 519. [Google Scholar] [CrossRef]
- Ji, P.; Wen, J.; Gao, X.; Li, H.; Cai, H. Roadbed tribological energy harvester. Science Advances 2025, 11, 25. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, E.; Chen, T.; Wang, J.; Hu, Z.; Mi, J.; Pan, X.; Xu, M. A novel humidity resisting and wind direction adapting flag-type triboelectric nanogenerator for wind energy harvesting and speed sensing. Nano Energy 2020, 78. [Google Scholar] [CrossRef]
- Chen, P.; An, J.; Shu, S.; Cheng, R.; Nie, J.; Jiang, T.; Wang, Z. L. Super-Durable, Low-Wear, and High-Performance Fur-Brush Triboelectric Nanogenerator for Wind and Water Energy Harvesting for Smart Agriculture. Advanced Energy Materials 2021, 11((9)). [Google Scholar] [CrossRef]
- You, J.; Shao, J.; He, Y.; Yun, F. F.; See, K. W.; Wang, Z. L.; Wang, X. High-Electrification Performance and Mechanism of a Water-Solid Mode Triboelectric Nanogenerator. ACS Nano 2021, 15((5)), 8706–8714. [Google Scholar] [CrossRef]
- Li, C.; He, F.; Wang, Y.; Guo, H.; Liang, Z.; Gan, R.; Tian, Z. Q. 3D-braided-electrode-based liquid-solid triboelectric nanogenerator for high-efficiency low-frequency mechanical energy harvesting and angle monitoring. Chemical Engineering Journal 2025, 518. [Google Scholar]
- Xie, L.; Lu, B.; Sima, Z.; Liu, Y.; Ji, H.; Gao, Z.; Jiang, P.; Van Zalinge, H.; Mitrovic, I. Z.; Sun, X.; Wen, Z. Mechanical-electric dual characteristics solid-liquid interfacing sensor for accurate liquid identification. Nat Commun 2025, 16((1)), 7069. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Chen, J.; Su, Y.; Jing, Q.; Li, Z.; Yi, F.; Wen, X.; Wang, Z.; Wang, Z. L. Eardrum-inspired active sensors for self-powered cardiovascular system characterization and throat-attached anti-interference voice recognition. Adv Mater 2015, 27((8)), 1316–26. [Google Scholar] [CrossRef]
- Ouyang, H.; Liu, Z.; Li, N.; Shi, B.; Zou, Y.; Xie, F.; Ma, Y.; Li, Z.; Li, H.; Zheng, Q.; Qu, X.; Fan, Y.; Wang, Z. L.; Zhang, H.; Li, Z. Symbiotic cardiac pacemaker. Nat Commun 2019, 10((1)), 1821. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, Z.; Gao, F.; Zhao, X.; Xun, X.; Kang, Z.; Liao, Q.; Zhang, Y. Self-powered ultrasensitive pulse sensors for noninvasive multi-indicators cardiovascular monitoring. Nano Energy 2021, 81. [Google Scholar]
- Lin, Z.; Chen, J.; Li, X.; Zhou, Z.; Meng, K.; Wei, W.; Yang, J.; Wang, Z. L. Triboelectric Nanogenerator Enabled Body Sensor Network for Self-Powered Human Heart-Rate Monitoring. ACS Nano 2017, 11((9)), 8830–8837. [Google Scholar] [CrossRef] [PubMed]
- Madlung, A. The chemistry behind the air bag—High tech in first-year chemistry. Journal of Chemical Education 1996, 73((4)), 347–348. [Google Scholar] [CrossRef]
- Aravind, S. L.; Sivapirakasam, S. P.; Balasubramanian, K. R.; Surianarayanan, M. Thermo-kinetic studies on azodicarbonamide/potassium periodate airbag gas generants. Process Safety and Environmental Protection 2020, 144, 15–22. [Google Scholar] [CrossRef]
- Surendran Lathika, A.; Suthangathan Paramashivan, S.; Karuppudaiyar Ramasamy, B.; Mahadevan, S. Impact of fuel/oxidizer ratio of NaN3 and KNO3 airbag gas generants on toxic emission and performance. Process Safety and Environmental Protection 2020, 133, 348–357. [Google Scholar] [CrossRef]
- Damse, R. S. Studies on the decomposition chemistry of triaminoguanidine azide and guanidine nitrate. J Hazard Mater 2009, 172((2-3)), 1383–7. [Google Scholar] [CrossRef]
- Seo, Y.-D.; Chung, S. H.; Yoh, J. J. Automotive airbag inflator analysis using the measured properties of modern propellants. Fuel 2011, 90((4)), 1395–1401. [Google Scholar] [CrossRef]
- Izato, Y.-i.; Shiota, K.; Satoh, K.; Satoh, T.; Yahata, Y.; Miyake, A. Analyses of the thermal characteristics and gaseous products of guanidine nitrate/basic copper nitrate mixtures using calorimetry with high resolution mass spectrometry. Journal of Analytical and Applied Pyrolysis 2020, 151. [Google Scholar] [CrossRef]
- Jeyabalaganesh, G.; Sivapirakasam, S. P.; Balasubramanian, K. R.; Aravind, S. L. Evaluation on substitution of conventional azide based fuel materials with an alternate one in an airbag system—A review. Materials Today: Proceedings 2021, 46, 9544–9549. [Google Scholar] [CrossRef]
- Gaunekar, S.; Ambekar, A. The hygrothermal aging effects of guanidine nitrate/basic copper nitrate-based airbag gas generant. Thermochimica Acta 2025, 752. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2026 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



