
Submitted:
27 December 2025
Posted:
30 December 2025
You are already at the latest version
Abstract
With the rapid development of the automotive industry, autonomous driving has attracted growing research interest, among which path planning and trajectory tracking play a central role. To better understand the evolution, current status, and future directions of this field, this study conducts a comprehensive bibliometric analysis combined with latent Dirichlet allocation (LDA) topic modeling on publications related to autonomous vehicle path planning and trajectory tracking indexed in the Web of Science database. Multiple dimensions are examined, including publication trends, highly cited authors, leading institutions, research domains, and keyword co-occurrence patterns. The results reveal a sustained growth in research output, with trajectory planning, path optimization, trajectory tracking, and model predictive control emerging as dominant topics, alongside a notable rise in learning-based approaches. In particular, reinforcement learning and deep reinforcement learning have become increasingly prominent in complex decision-making and tracking control scenarios. The analysis further identifies core contributors and institutions, highlighting the leading roles of China and the United States in this research area. Overall, the findings provide a systematic overview of the knowledge structure and evolving research trends, offering valuable insights into key opportunities and challenges and supporting future research toward safer and more intelligent autonomous driving systems.
Keywords:
path planning
; trajectory tracking
; model predictive control
; linear quadratic regulator
; autonomous vehicles
; bibliometric analysis
; visualization analysis
1. Introduction
With the continuous rise in the global fleet of various vehicles and the rapid advancement of multidisciplinary technologies, the application scenarios for vehicles are becoming increasingly diverse. Against this backdrop, autonomous driving technology has emerged. This technology can effectively reduce traffic accidents caused by driver error, significantly enhancing road safety. Simultaneously, it can make a significant impact in the logistics and transportation sector, reducing reliance on human labor and improving transport efficiency. Furthermore, autonomous driving technology can be widely applied to public transportation systems, optimizing traffic flow, alleviating congestion, and bringing comprehensive transformation and improvement to modern transportation. Within the autonomous driving technology framework, the vehicle planning and control segment serves as the core link of the autonomous driving system, playing a pivotal bridging role. It not only acts as the primary driver for enhancing the intelligence level of autonomous vehicles but also provides crucial support for ensuring driving safety. Therefore, conducting thorough investigations into path planning and trajectory tracking technologies is essential for advancing the development of autonomous vehicles[1].
Unlike traditional driving, autonomous driving technology enables real-time decision-making and route planning, rapidly calculates optimal paths, and employs advanced algorithms to ensure vehicles smoothly and precisely follow target trajectories. Path planning is a multidisciplinary technique that amalgamates advanced domains including computer science, machine learning and robotics. It aims to enable autonomous vehicles, robots, drones, and other mobile entities to precisely and efficiently plan optimal or feasible routes from origin to destination within complex environments. It not only considers the shortest path but also balances key factors such as energy consumption minimization, obstacle avoidance, and time constraints, ensuring the comprehensiveness, practicality, and efficiency of path planning[2].
In autonomous driving, path planning first generates a global route through a road network; subsequently, local planners handle moment-to-moment maneuvers to avoid obstacles. Among these, global route — also known as navigation planning—has extensive applications in robot navigation and map navigation domains, with related algorithms having reached a relatively mature stage. In 1956, Dutch computer scientist Dijkstra introduced an algorithm that bears his name, it starts from the source vertex and greedily scans every node in the graph to construct the minimum-cost route[3]. Building upon this foundation, scholars such as Hart and Nilsson introduced heuristic functions and proposed the A* algorithm. By prioritizing the expansion of nodes with strong goal orientation, this approach significantly reduces the number of nodes searched and enhances search efficiency[4]. Meng and Wang integrate the global-level semantic priors encapsulated in large language models with the exact heuristic search of the A* algorithm, yielding a hybrid planner that prunes the search space and reduces both time complexity and memory footprint by an order of magnitude. This approach enhances algorithmic efficiency while maintaining path validity, making it suitable for path planning in large-scale scenarios[5]. The RL-RRT algorithm proposed by Chiang et al. employs deep reinforcement learning to learn obstacle avoidance strategies, utilizing it as a local optimizer. Subsequently, a reachability-based distance heuristic is employed to steer the tree extension, efficiently resolving path-planning tasks subject to intricate constraints[6].
In practical path planning tasks, the most challenging aspect is often local path planning, also known as trajectory planning. Consequently, the field of trajectory planning has attracted significant academic attention, with research efforts relatively concentrated in this area. Xu et al. propose a motion planning method that accounts under uncertainty, enabling autonomous vehicles to generate safe trajectories in complex traffic environments. This method generates candidate trajectories through spatio-temporal grid points, combines a Linear Quadratic Gaussian (LQG) framework with a Kalman filter[7], and optimizes trajectory safety. Its effectiveness has been validated through experiments. Nguyen et al. proposed a hierarchical motion planning and offline robust model predictive control strategy for autonomous vehicles in complex scenarios[8]. Through the artificial potential field method and offline Robust Model Predictive Control (RMPC) method, this strategy effectively addresses challenges under adverse conditions, ensuring safe and stable vehicle operation. Ding et al. introduced a trajectory planning methodology grounded in spatio-temporal semantic corridors, which integrates semantic information with spatio-temporal constraints to effectively enhance the safety of autonomous vehicles in complex urban environments[9]. Zhejiang University and Cainiao Unmanned Vehicle Technology Team proposed an autonomous driving trajectory planning system called CarPlanner, which is an autoregressive planner based on Reinforcement learning (RL) seeks to address the trajectory planning challenge in extensive autonomous driving systems[10]. We demonstrate its effectiveness on the real-world dataset nuPlan and show its ability to surpass existing State of The Art (SOTA) approaches combining rules and imitation learning. Recent research by Gao Fei's team at Zhejiang University has proposed an innovative hierarchical trajectory planning method. This method mimics the intuitive human ability in path planning, comprehensively considering global environmental data and historical experience to determine viable routes. This approach enhances both computational robustness and motion fidelity through a spatiotemporal trajectory optimizer designed for numerical stability, alongside a novel two-layer polynomial trajectory structure. Leveraging differential flatness, the optimizer boosts efficiency while inherently resolving singularities in the original formulation, ensuring reliable convergence to smooth, feasible trajectories during complex maneuvers[11].
Trajectory tracking technology is the key to enabling autonomous vehicles to travel along a predetermined path, and to correct deviations in real time and adjust direction and speed through a feedback control system[12]. The Pure Pursuit Algorithm and Stanley algorithm are control strategies designed based on vehicle geometry. They possess a straightforward structure and are facile to deploy, rendering them appropriate for fundamental driving scenarios. To secure pinpoint tracking under demanding, high-speed conditions, designers often turn to optimization-based strategies like Linear Quadratic Regulator (LQR) and Model Predictive Control (MPC). Lu et al. proposed an adaptive LQR controller based on genetic algorithms. They generated an offline parameter table by optimizing the weight matrix and developed an online adaptive controller. The simulation results showed that it enhances trajectory fidelity and stabilizes the vehicle across the full speed spectrum[13]. Zhao et al. proposed a trajectory tracking controller based on linear active disturbance rejection control, which improves the tracking accuracy and dynamic performance of ground autonomous driving vehicles in complex environments through modeling compensation and extended disturbance observation[14]. A research team from Anhui University of Technology proposed a curvature-adaptive Linear Time-Varying Model Predictive Control (LTV-MPC) control algorithm[15] to address the issues of diminished tracking precision and inadequate driving stability of vehicles on trajectories with changing curvature (such as curves and ramps). To mitigate the recurring trajectory-tracking issue encountered by autonomous vehicles in specific working scenarios, especially in the presence of unknown iterative change interference and input constraints, Zhang et al. proposed an enhanced adaptive iterative learning control scheme rooted in the internal model principle. The integration of Adaptive High-Order Internal Model (AHOIM) enhances static precision and dynamic response while the system retraces the same path[16]. To address extreme working conditions such as tire blowouts, Yang et al. advanced a trajectory-tracking strategy that hinges on the Frenet coordinate system. The Pontryagin Maximum Principle (PMP) was used to optimize speed control in the longitudinal direction, and back-stepping was used in the lateral direction to ensure Lyapunov stability[17]. This method showed good control effects in both simulations and actual vehicle experiments.
Currently, the field of planning and control technology is developing rapidly. However, there is still a lack of research that comprehensively sorts out and systematically summarizes its progress in academic literature at home and abroad. Traditional literature review methods face problems of low efficiency and poor timeliness when processing large amounts of literature, which makes it difficult to meet the needs of quickly and accurately obtaining key information. Therefore, an efficient literature induction and summary method is needed to systematically analyze the development of this field. Bibliometric analysis is an interdisciplinary quantitative research method that integrates mathematics, statistics, and bibliographic theory. It mainly conducts quantitative research on academic literature and its related elements. The analysis encompasses the quantity of publications, including journal papers and citation data, author groups (individual authors and research institutions), and document identifiers (such as subject terms, keywords, etc.)[18]. This method reveals the present condition and developmental trajectories of research within a particular domain via quantitative analysis, form’s objective conclusions, and uses visualization technology to transform complex data into intuitive maps to help identify disciplinary hotspots and cutting-edge directions. By coupling CiteSpace or VOSviewer (for citation, co-word, and cluster analysis) with Statistical Package for the Social Sciences (SPSS), researchers can drill down into the intellectual core of a field[19]. Although both domestic and international researchers have undertaken comprehensive research on autonomous vehicle path planning and trajectory tracking technology and produced many review results, there is still a lack of research that systematically reviews the development trends in this field based on bibliometric methods.
This study adopts bibliometric methods and conducts a systematic analysis through the following steps: first, export indexed articles from Web of Science Core Collection (WoSCC) for downstream analysis, then use quantitative analysis methods for statistical processing, identify influential authors, countries and research institutions in the field utilizing citation analysis, and subsequently integrating keyword co-occurrence analysis to reveal the evolution process and research hotspots of the field[20]. The remainder of this article is structured in four sections: research design and data sources are outlined in Section 2; Section 3 maps the current landscape and hotspots of autonomous-vehicle path planning and trajectory tracking; Section 4 pinpoints emerging trends; and Section 5 translates these insights into a forward-looking research agenda.
2. Research Methods and Materials
2.1. Research Methods
2.1.1. Bibliometric Analysis Method
Bibliometrics is a visualization technology that conducts comprehensive and detailed statistical analysis and scientific and precise quantitative analysis of massive amounts of published literature. It can clearly present the overall status, development context, and future dynamic trends of a specific knowledge field in an intuitive and easy-to-understand visualization form. It is an important branch of information visualization[21]. In the field of academic research, Analytical and visualization instruments for literature, exemplified by CiteSpace, VoSviewer and Pajek are widely used, providing researchers with powerful data processing and visualization support. Among them, CiteSpace, developed by Professor Chen Chaomei's team, is comprehensive in functions and is among the most extensively utilized tools for literary analysis and visualization in academia[19,22].
Based on visualization tools such as CiteSpace and VOSviewer, this paper systematically sorted out the core literature in the domain of autonomous vehicle path planning and trajectory tracking throughout the last two decades, a knowledge graph in this domain has been developed and studied[19]. The study focused on the dynamics of publication volume, author collaboration networks, the distribution of research institutions, keyword co-occurrence, emergent word analysis, and topic cluster evolution, comprehensively revealing the research evolution path and hotspot evolution trends in this field[23]. For details on the mapping method, please refer to the reference[24].
2.1.2. Method for Analyzing Published Authors
In scientometrics, a core group of authors denotes a collective of writers who have produced a substantial volume of publications in a certain research landscape and have significant academic influence[25]. This group usually represents the research backbone and academic authority in the relevant landscape, and has a significant position in guiding research directions and disseminating knowledge[26]. Therefore, identifying core authors is of great significance for gaining an in-depth understanding of the discipline development pattern and building a scientific research cooperation network.
According to Price's Law proposed by bibliometrician Derek J. de Solla Price, the identification of core authors can be estimated using the following empirical formula[27]:
Among them, represents the publication number threshold of core authors, that is, the publication threshold for qualifying as a core author; reflects the total publications credited to the author with the most publications in the research field; The constant 0.747 is an empirical coefficient obtained through empirical research.
The meaning of this formula is that if there is an author in a certain field whose publication volume is , consequently, an author who has written a minimum of publications may be regarded as a core author.
2.1.3. Keyword Analysis Method
The keyword analysis in this paper uses VOSviewer software[26] to perform knowledge graph clustering and Pajek software[27] to perform layout optimization. To visually display the time characteristics of a keyword's appearance, this article uses different colors to represent the average year a keyword appears. The mean publication year of a keyword is computed as follows:
Among them: year refers to when the keyword first appears in print, and is the frequency of the keyword's appearing in that year.
2.1.4. Keyword Emergence Analysis Method
“Emergence” refers to the phenomenon that the frequency of a specific keyword increases significantly within a specified timeframe, which often marks the emergence of emerging areas of intensive investigation or cutting-edge directions[28]. By analyzing the temporal distribution of keywords, emergent word detection can identify keywords with a high frequency change rate and a fast growth rate, thereby revealing the evolution trend and development trend of research topics in a certain discipline. At the same time, in research, we can combine keyword co-occurrence networks with emergent word detection to elucidate the research landscape and developmental context in the domain of "autonomous driving vehicle path planning and trajectory tracking" in a more comprehensive and profound way.
In this study, we used the CiteSpace tool[19] to detect emergent words in relevant literature within the domain of autonomous vehicle path planning and trajectory tracking. The core algorithm of this tool is based on the state machine model proposed by Kleinberg[29]. It can effectively identify the research focus and frontier shifts in this field at different times and provide an empirical basis for grasping the development of the discipline.
2.2. Autonomous Vehicle Algorithm System Architecture
The algorithm system architecture of an autonomous vehicle is a complex and highly integrated multi-layer architecture, which is usually composed of three core subsystems[30]: environment perception (Perception), decision planning (Planning), and motion control (Control). As shown in Figure 1, the typical architecture of the algorithm system of an autonomous vehicle is shown. The figure clearly shows the functions of each subsystem and its information interaction path, among which the planning and control parts play a core role in the autonomous driving vehicle algorithm system.
In an autonomous driving system, the planning part plays a vital role, and its primary function is to make behavioral judgments based on perceived environmental information. First, in the cognitive understanding stage, the system accurately identifies and judges the vehicle’s own position and surrounding environment by fusing multi-source sensor information. Then, in the decision planning stage, the system predicts future traffic conditions and formulates a secure and effective driving route from the present location to the destination[31]. This process involves complex algorithms (including but not limited to path optimization, collision avoidance, and dynamic traffic adaptation) to ensure the rationality and foresight of vehicle behavior[32,33]. The control part focuses on converting the decisions made in the planning stage into specific vehicle dynamic control instructions. Deeply integrated with the vehicle's underlying control systems, the control layer utilizes advanced drive-by-wire technology to precisely control actuators such as electronic braking, drive, and steering. This process not only requires real-time monitoring and adjustment of vehicle responses based on an accurate vehicle model[34] to ensure high consistency between the driving trajectory and the planned path[35], but also requires consideration of vehicle stability and safety to achieve precise management of vehicle dynamic behavior. Overall, the control layer is the key link in the autonomous driving system that bridges the gap between vehicle behavior decision-making and physical execution.
2.3. Origins of Data and Retrieval Methods
This research sourced its literature from the globally recognized WoSCC. This database is widely recognized as a leading platform for high-quality, high-impact scholarly literature from around the world. Through the advanced search function of the Web of Science platform, relevant literature on the field of autonomous vehicle path planning and trajectory tracking published between 2000 and 2025(with 2025 records included only up to September) was systematically retrieved in the form of subject word combinations. The search conditions are as follows: publications were limited to English-language articles and reviews. As shown in Table 1, the search approach employs a combination of many subject phrases, including core terms such as "autonomous vehicle", "self-driving car", "path planning", "trajectory tracking" and their synonyms, and constructs a complete search formula through Boolean logic operators (AND, OR)[36] to guarantee the thoroughness and precision of the search outcomes.
To guarantee the precision of the research subject, this research further optimized the literature screening process based on the preliminary search, which followed the standard methods of systematic review and bibliometric analysis[37]. First, we initially focused on relevant literature by limiting the scope of disciplines (including core areas such as engineering, transportation, and robotics). Second, we used manual screening to review the titles, abstracts, and keywords of each article based on pre-set inclusion and exclusion criteria to exclude irrelevant topics. Finally, after rigorous data cleaning (eliminating non-research literature such as conference abstracts and editorials and deduplicating them), we ultimately obtained 329 high-quality articles as the research sample. All selected articles contain complete metadata (title, author, institution, keywords, abstract and references) and citation information. Based on this standardized literature dataset, this study uses two professional bibliometric tools, CiteSpace and VOSviewer, to conduct in-depth analysis.
3. Analysis of Basic Characteristics of Autonomous Vehicle Path Planning and Trajectory Tracking Research
3.1. Descriptive Statistics
The temporal changes in the number of publications on an academic topic can elucidate the evolution and developmental trajectories within that domain[28], which is a classic method for tracking the development of disciplines in scientometrics. The yearly quantity of publications is a significant metric of the developmental process and future trends of a research direction. The trend of changes in the aggregate total of publications can help identify the development stages of the research direction (such as the formation stage, growth stage, and explosive stage)[38]. Figure 2 shows the scientific achievements during the research period of nearly two decades. From 2000 to 2013, this research field experienced a relatively slow start-up phase, with a low number of publications, indicating that the field remains in its nascent phase of development. Since 2014, the number of publications in this research field has begun to show a steady growth trend, which indicates that research activities in this field have become increasingly active, and the academic influence has gradually increased. In particular, after 2020, this growth trend has become more significant, and the average growth rate has further accelerated, which aligns with the overarching explosive trend of artificial intelligence-related fields[39]. In 2024, the quantity of publications attained a zenith of approximately 50. Although the number of publications declined to some extent between 2021 and 2023, the overall level of publication remained at a high level. In addition, based on the current annual publication progress and trend analysis, and with reference to the scientific growth model[40], it is predicted that the number of publications in 2025 has great potential to break through the historical high and reach a new peak.
Between 2000 and 2010, the number of citations in this research field remained relatively low, with little change. This indicates the comparatively restricted impact and acknowledgement of research in this domain during that period, which is consistent with the typical characteristics of the early stages of knowledge diffusion in emerging fields[39]. However, since 2011, the number of citations has begun to show a gradual and weak upward trend, indicating that the research results are gradually receiving more attention. After entering 2015, the growth rate of citations has accelerated significantly, indicating that the influence and recognition of research results have increased significantly, indicating that the field may have entered a stage of exponential growth[41]. Especially since 2018, the growth rate of citations has increased significantly, and this trend has reached explosive growth between 2021 and 2024, which is particularly significant. Although the citation data for 2025 (based on existing forecasts) is still at a relatively low level (mainly due to the inherent time lag of citation behavior), an examination predicated on the dynamic model of citation proliferation[42] and the long-term citation growth trend in the field suggests that the number of citations in 2025 is likely to reach a new historical peak.
The quantitative analysis in Figure 2 shows that after 2011, research output in the domain of autonomous vehicle path planning and trajectory tracking has shown a significant leap: the quantity of publications and the rate of citations have increased exponentially[41], indicating that this research direction is undergoing a period of rapid knowledge accumulation, and its academic attention and the influence of its results continue to increase. This phenomenon is consistent with the characteristics of the definition of emerging research frontiers in scientometrics[43], and strongly reflects the systematic attention and in-depth exploration of this field by the academic community.
3.2. Analysis of Lead Authors
Based on statistical data, Table 2 lists the authors possessing the greatest quantity of publications within the domain of autonomous vehicle path planning and trajectory tracking, along with their personal information (ranking is not considered if the number of publications is the same; for authors with only three publications, only a subset is selected). Statistical results show that the most prolific author contributed 5 papers. According to the core author calculation formula proposed in Price's Law , the threshold papers are obtained, which is rounded to 2 papers. That is, the author who has published 2 papers is defined as the core author in the field. Based on this criterion, a total of 94 authors meet the definition of core authors. The identification of core author groups helps to define the group of researchers who have made major contributions to the production of knowledge within the domain, and whose scientific findings have significantly advanced the field.
As shown in Figure 3 and Table 2 of this study, Li Keqiang (5 papers) and Chen Yimin (4 papers) are the most important nodes in the network, both from China, which is consistent with the phenomenon observed in other studies that highly productive core authors often dominate the collaboration network[44]. The nodes of authors who published 3 articles are dense, which also reflects the widespread existence of "weak connection" advantages in the collaborative network. By drawing on the optimization ideas of path-finding algorithms, we analyzed the author collaboration network in this field and identified four main collaboration teams (Li Keqiang team, Chen Yimin team, Bitar Glenn team, and Nie Zhige team). To some extent, these teams are similar to key nodes or hubs in a path-finding network, significantly influencing the dissemination of knowledge and the efficacy of collaboration[45]. In the future, it may be possible to further explore the application of these algorithm optimization principles in predicting or enhancing the potential of scientific research cooperation.
In the process of conducting an in-depth analysis of academic achievements in related fields, we found that when authors who published two or more papers were the main analysis objects, the authors with the highest citation counts are shown in Table 3. Included are Sahoo A., Dwivedy S. K., and Robi P. S. co-authored the two most cited articles and tied for first place, which fully demonstrates their outstanding influence and academic status in the field. In addition, author Li Keqiang scored first in publication count and second in citation frequency. This data also intuitively reflects his top strength and strong academic influence in the field. His research results are not only considerable in quantity but also of high quality and have been widely recognized and cited. At the same time, Chen Yimin (published 4 articles in total) and several other scholars who published 3 articles, although they produced a considerable body of papers, their citation impact remained below the global average, did not make it into the ranking range of Table 3 due to the relatively small number of citations of their articles. This also indirectly reflects that academic influence is not only determined by the number of publications, but the frequency of citations is also one of the important indicators for measuring academic value and influence.
3.3. Publishing Institutions and Country
This study analyzes scientific research institutions that have published 2 or more papers and explores the academic influence of each institution in the domain of autonomous vehicle path planning and trajectory tracking. Through systematic sorting and analysis of relevant data, the ten foremost scientific research institutions based on citation times were selected. Detailed information is shown in Table 4. Among all institutions, those with the highest citation impact include Tsinghua University, Norwegian University of Science and Technology (NTNU), and Beijing Institute of Technology. These three institutions have achieved fruitful results in autonomous driving technology research, and their research has received widespread attention and citations, rendering substantial contributions to the advancement of this field. Although the NTNU published only 6 papers, they were highly cited, indicating that its research results in autonomous driving technology are of high quality and have great influence, and have been widely recognized by the academic community. Further analysis found that among the top 10 institutions with the most citations, five were from China, which indicates that China has achieved substantial advancements in the domain of autonomous driving technology research and has a high level of scientific research[47]. The research results of Chinese scientific research institutions have strongly supported domestic technological development and made important contributions to the advancement of global autonomous driving technology, demonstrating China's scientific research strength and influence in this field.
From the visualization of the publishing institutions in Figure 4, it can be observed that various academic institutions are organized around several larger core institutions, among which the cooperation between Chinese institutions is particularly close[48]. The size of the circles in the figure indicates that Beijing Institute of Technology and Tsinghua University are the two institutions with the most publications. As core institutions, they engage in extensive exchanges and collaborations with numerous academic institutions in different countries, demonstrating their significant influence in the global academic community. The analysis results (Figure 5) indicate that China leads in publication volume, comprising 51.9% of the total. This phenomenon is due to China's huge automobile consumer market and the government's strong promotion of new energy vehicles. Simultaneously, thanks to the swift advancement of artificial intelligence technology, China hosts a large number of research institutions and scholars in this field and has actively conducted related research, fully demonstrating China's strong scientific research strength and influence in this field. The second country in terms of the number of publications is the United States, which accounts for 14.6%. Germany and Canada rank third and fourth, accounting for 6.1% and 4.8% respectively. The top 5 countries in terms of citation frequency are China (2,610 times), the United States (961 times), Norway (539 times), India (484 times) and the United Kingdom (395 times). The chart on national collaboration (referred to as Figure 6) illustrates that China and the United States have strong collaborative ties with various nations, notably with each other, Australia, and Canada. Additionally, both China and the United States are at the forefront when it comes to the volume of publications and the frequency of citations across different countries and institutions.
3.4. The Most Influential Publishing Institutions
According to Table 5, publisher-level statistics offer a complementary macro-level view of how autonomous driving research is disseminated and where influence is concentrated in this bibliometric dataset. In terms of publication volume, IEEE (159 papers), Elsevier (52), and MDPI (39) are the three most productive publishers, together contributing 250 papers. Within the top-10 list, IEEE alone accounts for 159 of 308 publications, highlighting its leading role as a major dissemination channel in this field.
A similar concentration is observed for citation impact. IEEE, Elsevier, and Springer Nature receive the highest citation counts (3129; 1768; and 289, respectively), totaling 5186 citations—approximately 89% of the citations accumulated by the top-10 publishers (5186/5835). Notably, publication volume and citation impact are not strictly proportional across publishers: citation intensity (citations per paper) varies, with Elsevier (≈34), Springer Nature (≈22), and IEEE (≈20) showing higher average citation rates in this dataset, whereas MDPI exhibits a lower average citation rate (≈4.7). Overall, these patterns suggest that a small number of major publishing systems host a large share of the literature and capture a disproportionate share of citations, thereby complementing venue- and author-level analyses in characterizing the field’s dissemination structure and impact distribution[49].
3.5. Research Field Analysis
Research field analysis in CiteSpace operates through the classification of literature based on attributes like WoS categories and research directions[50]. Analysis of the research field knowledge graph (Figure 7, Table 6) allows for the identification of the frequency and overlapping relationships across the 30 research fields. Among them, the publication frequency and betweenness centrality of the field of Engineering, Electrical & Electronics are ranked first. This is mainly because the field of autonomous vehicle path planning and trajectory tracking covers a very wide range of research, involving many aspects such as real-time adaptability related to engineering[51]. Automated Control Systems ranked second in publication frequency, but its betweenness centrality was relatively low, indicating that scholars in this field had relatively few connections with other fields. Computer Science, Oceanography, and Robotics, on the other hand, had higher betweenness centrality, indicating that these fields were more closely connected with other research areas.
In the field of oceanography, the research and development of autonomous underwater vehicles (AUVs) started early, even earlier than that of ground autonomous vehicles. Automated Guided Vehicle (AGV) enables a multitude of applications, covering multiple key areas encompassing optimal control, trajectory planning, and collision avoidance. In the research and development of ground autonomous vehicles, some algorithm designs can draw on the research results of AUVs[46], and there is a high correlation between the two. Therefore, it makes sense that Oceanography ranks second in betweenness centrality in the autonomous vehicle field with a score of 0.38. Rounding out the top 10 are several key fields, including Transportation Science, Telecommunications, and Instruments and Instrumentation, among others.
3.6. Keyword Co-Occurrence Analysis
Keywords concisely represent the core concepts of a paper. In-depth keyword analysis effectively reveals the main thesis context. There must be a specific internal connection between the keywords listed in a paper, and this keyword co-occurrence frequency serves as a metric for the connection. There is a positive relationship between the co-occurrence frequency of keyword pairs and the strength of their thematic correlation[52].
By analyzing the co-occurrence of word pairs, co-word analysis maps the conceptual structure and inherent linkages among topics in a document corpus. Specifically, by counting the frequency of each pair of subject terms in a set of documents appearing in the same document, a co-word network based on word pair associations can be constructed[53]. In this network, the number of nodes corresponds to the number of keywords in the graph, and the number of edges represents the number of connections between keywords. Whenever two keywords appear in the same document, a connection is formed between them. The keyword clustering in this field over the past 20 years is illustrated in Figure 8. In the visualization, each vertical column represents a keyword cluster. The color shift from blue to yellow denotes the average year of keyword emergence, a feature that serves to track the evolution of research hotspots within individual clusters.
Between 2000 and 2005, autonomous vehicle planning and control technology was in its infancy, with relatively few related research results and literature. The keywords appearing in its key co-occurrence graph were also relatively limited, mainly including feedback linearization, cooperative control, fuzzy control, and underwater vehicle. At this stage, research is mainly based on control theories that have accumulated a certain foundation to provide support for vehicle autonomous control. Given that complex control processes have strong nonlinear characteristics, it is necessary to simplify controller design and analysis and ensure the stability of the system near the equilibrium point. Therefore, feedback linearization methods are applied to dynamic system processing. In the key co-occurrence graph of this period, feedback linearization is the largest node, followed by cooperative control, and the two main paths extending from "feedback linearization" as the node are optimal control and autonomous vehicles, which shows that the application of optimal control in the field of autonomous vehicles is gradually gaining attention.
From 2006 to 2016, research in this field was in a slow development stage, and high-frequency keywords included design, navigation, localization, intelligent vehicles, Trajectory Generation, Trajectory Control, guidance and cooperative control. The research in this stage gradually became more targeted, with the content becoming more specific and closer to practical applications. From the appearance design of autonomous vehicles to vehicle positioning and navigation, and then to specific trajectory generation methods and trajectory tracking methods, all became research focuses. Researchers began to explore effective ways to achieve autonomous driving of vehicles based on the core technical content of autonomous vehicles[54]. In the research and development of autonomous vehicles, appearance design, positioning navigation, and trajectory generation and control are relatively critical areas. In terms of vehicle shape design, researchers focus on optimizing aerodynamic performance to improve energy efficiency and enhance handling stability. In the field of positioning and navigation, a variety of technologies have been widely explored and applied. For example, GPS/Inertial Measurement Unit (IMU) positioning fusion technology combines the advantages of the GPS and the IMU to achieve more real-time and accurate positioning. At the same time, Simultaneous Localization and Mapping (SLAM) technology has also been widely used, which enables vehicles to build maps and determine their own positions in unknown environments in real time[55]. In addition, the application of high-precision maps provides more accurate path planning and real-time traffic updates for vehicle navigation, further improving the safety and reliability of autonomous driving systems. In terms of trajectory generation, various methods have been gradually explored and applied. Bezier curve is a commonly used method. It can smoothly connect path points by defining a series of control points to generate a trajectory that meets the vehicle dynamics constraints while taking into account comfort and feasibility. In the field of trajectory tracking control, the composite controller combining feedforward and feedback integrates the predictive advantages of feedforward control and the correction capabilities of feedback control, thereby enhancing trajectory tracking accuracy and stability.
During the period of explosive development from 2017 to 2023, high-frequency keywords included path planning, trajectory planning, motion planning, trajectory tracking, model predictive control, vehicle dynamics, and optimization. Research in this phase has continued to deepen, with increasingly refined and forward-looking content. Path planning for autonomous vehicles, vehicle dynamics modeling, and the application of optimization algorithms have all become research hotspots. Researchers have begun to explore efficient ways to improve vehicle intelligent decision-making and control capabilities from the perspective of key technologies for autonomous vehicles[56]. In terms of path planning, deep learning and reinforcement learning are being used to develop intelligent path planning algorithms to cope with complex road environments. The former adaptively generates paths by imitating human decision-making, while the latter optimizes strategies through interactive environments. The dynamic modeling method based on physical models, combined with vehicle geometry and dynamic parameters, can accurately predict its motion state under various working conditions[34]. In terms of optimization algorithms, researchers have applied advanced technologies such as MPC, optimization-based trajectory planning, and multi-objective optimization[57,58]. MPC predicts and optimizes future states through dynamic models to achieve accurate trajectory tracking; trajectory planning methods introduce constraints such as speed and comfort to generate optimal trajectories that conform to dynamics[59]; multi-objective optimization balances energy consumption, safety, and comfort to achieve optimal overall performance.
Highly cited papers often attract attention due to their significant breakthroughs and innovations in theory or technology, and their citation counts remain high. Research hotspots refer to specific topics that have received widespread attention and concentrated research in the academic community during a specific period of time[60]. In order to clearly observe the research hotspots of path planning and trajectory tracking in the field of autonomous driving, this study conducted a preliminary analysis of relevant data using CiteSpace software[19], and further used VOSviewer software to draw a keyword co-occurrence density map based on 329 high-quality and valid documents screened out (as shown in Figure 9). In this study, in order to accurately capture research hotspots, the minimum frequency of keyword appearance was set to 20 times. In the drawn graph, the gradual change of color from light yellow to dark red intuitively reflects the increasing frequency of keyword co-occurrence, that is, the increase in research enthusiasm. Through in-depth analysis of graph data from 2000 to 2025, it can be found that the research hotspots of path planning and trajectory tracking in the field of autonomous driving mainly focus on key technical contents such as path planning, trajectory planning, motion planning, collision avoidance, optimization, motion control and reinforcement learning[61]. It also covers important research directions such as autonomous driving vehicles, autonomous ground vehicles and connected vehicles[62].
3.7. Analysis of Emerging Research Frontiers at Different Stages
The keyword emergence map can quantitatively represent the popularity and changing patterns of different research hotspots. The greater the keyword emergence intensity, the greater the research popularity of the topic. Keyword emergence analysis was completed in CiteSpace software, with the time span set to 2003 to the present. Given the limited amount of literature data in previous years, statistics were started from that year. The analysis was conducted with the time slice set to 1 year, the node type to keyword, and considering that the overall literature volume is within a controllable range, all the literature extracted each year is used as the object analysis. On this basis, the top 25 keywords ranked by emergence intensity are counted and extracted. The red line in the figure indicates the time period when the keyword appears, which means that the keyword has the most significant influence during this period[63]. Figure 10 displays the quantitative characteristics of the keywords, including their year of first appearance, emergence strength, and the start (Begin) and end (End) years of their prominence. The red period represents the duration of its emergence, and the keyword sequence is sorted according to the size of the emergence strength.
Early research hotspots included design, motion planning, trajectory planning, and path planning. Design emerged with the greatest intensity and duration, while motion planning, trajectory planning, and path planning, while first appearing earlier, emerged relatively later. This distribution characteristic indicates that the research focus in this field has gradually shifted from the early design stage that focused on basic theories and macro concepts to more practical stages such as implementation, optimization and application. As shown in Figure 10, "motion control" emerged earlier than the other keywords and maintained a high level of popularity from 2018 to 2022, reaching a burst intensity of 2.73. This indicates that the performance requirements for motion control systems have continued to increase, and their applications have expanded to related fields such as autonomous vehicles and robotics. The keywords tracing and path following control emerged in 2021 and 2022, with intensities of 3.62 and 2.89, ranking second and third respectively, but the duration of emergence was less than one year. Since these two concepts are closely related to motion control, their research results and application scenarios overlap, but they focus more on vehicle trajectory tracking and therefore show higher emergence intensity in the short term.
The first appearance years of the vast majority of keywords are concentrated between 2018 and 2022, and their emergence duration is generally about one year, mostly concentrated within one to two years after the first appearance. In recent years, emerging research hotspots include real-time systems and heuristic algorithms. With the continued advancement of fields such as autonomous driving, the demand for real-time systems is becoming increasingly urgent, and the importance of reliable data processing capabilities has also increased significantly. At the same time, heuristic algorithms have also attracted widespread attention due to their efficiency and flexibility in handling complex optimization problems[56,64]. Another emerging hotspot focuses on vehicle dynamics and stability. As vehicle control systems continue to grow in size and complexity, stability analysis and control based on vehicle dynamics has become a key research direction.
3.8. Most Influential Articles
Given that academic influence often takes time to accumulate and becomes apparent, and that the influence of an article will gradually expand and receive more citation feedback over time, this section uses citation frequency as a key indicator and comprehensively considers the impact of time factors on the influence of articles, thereby identifying the ten most influential papers between 2000 and 2023. First, as can be seen from Table 7, the article with the most citations is the article by Sahoo et al.[46], which reviews the research status and development trends of AUVs. The article focuses on the latest progress in positioning and navigation, path planning and control, sensor technology, and underwater communications. The article analyzes in detail various positioning and navigation methods, from inertial navigation to SLAM, and introduces different optimal path planning and control strategies. Fossen et al.[65] proposed a nonlinear adaptive path tracking controller to compensate for the vehicle side slip effect caused by drift forces from environmental factors such as ocean currents, wind, and waves. The method is based on the line of sight (LOS) principle and extends it to the tracking control of the Dubins path. The unknown sideslip angle is first modeled as a constant parameter and designing an adaptive law for online estimation, it is proved that the balance point between the lateral tracking error and the parameter estimation error is consistent semi-global exponential stability, thereby ensuring that the sideslip angle estimate converges exponentially to the true value. The proposed adaptive control law is essentially an integral LOS controller, and its parameter adaptation mechanism provides an integral action. This article is also the most cited article.
Eskandarian et al. conducted a comprehensive review of the multi-layer perception-planning-control architecture and key technologies of connected autonomous vehicles (CAVs)[66]. CAV enhances environmental perception and coordination capabilities through on-board sensors and vehicle communication technology, significantly improving the robustness and reliability of autonomous driving systems in complex environments. The article provides a systematic review of key autonomous driving technologies, delving into perception-layer methodologies for multi-sensor fusion, positioning, and mapping, planning-layer algorithms for decision-making and trajectory generation, and control-layer strategies for trajectory tracking. It also focuses on analyzing emerging research directions such as collaborative perception, multi-vehicle collaborative decision-making and control brought about by networking and the challenges they face. Luo et al.[62] developed a cooperative automated lane change strategy utilizing Vehicle-to-Vehicle (V2V) communication to address the problem in current autonomous driving research that lane change processes are difficult to avoid collision risks caused by changes in the state of other vehicles. The core of this strategy consists of two parts: trajectory planning and tracking control. By using lane change time and distance as constraint optimization variables, a reference trajectory that meets safety, comfort, and efficiency requirements is generated and updated in real time. This strategy is robust across diverse driving scenarios such as routine, emergency, and returning to the original lane. The proposed sliding mode controller achieves robust and accurate tracking of the planned vehicle trajectory.
Shen et al. proposed an integrated path planning and tracking control method based on rolling horizon optimization (RHO) for AUVs[67]. Considering the limited effective sensing range of onboard sensors, this study uses a spline path template to model path planning as an RHO problem. This approach defines the planned path as the state trajectory of a virtual reference system, which possesses an identical kinematic and dynamic model to the AUV. By constructing an appropriate error dynamics system, the AUV tracking control problem is transformed into a stabilization problem of the error system. The implemented Nonlinear Model Predictive Control (NMPC) law inherently ensures the stability of the closed-loop system.
You et al. [68] proposed an autonomous lane-changing system for lane-changing behavior in autonomous driving, aiming to improve driving safety and alleviate traffic accidents and congestion caused by improper lane changes. The core of the system focuses on two major issues: trajectory planning and tracking control. The system uses a polynomial method to abstract vehicle motion as a time function to complete trajectory planning and uses an infinite dynamic circle to map collision detection to the parameter space. A backstepping-based tracking controller is designed, and its global convergence is verified by combining the Lyapunov function.
Dixit et al. [59] systematically reviewed the trajectory planning and tracking control methods in autonomous driving overtaking systems, pointing out that most current methods are only applicable to low-speed scenarios due to the uncertainty of environmental perception. The study compared different trajectory planning strategies from the perspectives of real-time performance, computational efficiency, and practical feasibility, pointing out that high-speed overtaking requires key considerations of vehicle dynamics, environmental constraints and accurate perception of obstacles. The study addresses trajectory tracking by the study analyzing the advantages and disadvantages of various control algorithms and found that despite the performance gains offered by advanced control methods, their effectiveness mostly depends on highly structured conditions, and existing schemes often assume that environmental information is completely known, which is inconsistent with actual driving conditions.
A fuzzy-logic-based system was employed by Antonelli et al. [69] to solve the motion planning and tracking problem for an autonomous robot on an unknown path. The system simulates human driving behavior and achieves efficient path following under the premise of satisfying the vehicle's kinematic constraints (limited linear velocity, angular velocity, and acceleration). The method uses the approximate geometric information of the curve ahead as the input of the fuzzy system and outputs the cruising speed required to ensure safe passage in real time.
To address the AGV docking challenge, Chai et al. introduced a novel framework that integrates real-time trajectory planning with tracking control[70]. In the motion planning phase, the study employed a recurrent neural network (RDNN) architecture to perform deep learning approximations of the optimal parking trajectory, fully exploiting the inherent correlations between vehicle states. To enhance the planner's adaptability, two transfer learning strategies were employed for deployment across various AGV platforms. To accurately track the planned trajectory, an adaptive learning neural network (ALNN) control algorithm was designed. Online adjustment of network parameters ensured both control system stability and tracking error convergence.
Zuo et al. [71] proposed a progressive model predictive control scheme (PMPCS) for intelligent vehicles. This scheme combines local path planning with tracking control and adopts an improved particle swarm optimization model predictive control method (IPSO-MPC) to solve both types of problems in a unified manner. This scheme significantly reduces the computational burden by seamlessly coordinating the two optimization layers. Furthermore, a novel planning algorithm is proposed that can handle both traffic light and overtaking timing constraints. The proposed algorithm incorporates MPC and Artificial Potential Field (APF) to integrate time-varying safety constraints into the framework. These constraints are transformed into repulsive force fields and asymmetric lane potential fields to generate collision-free paths, while pseudo-speed planning is employed to achieve traffic scheduling under traffic light constraints.
3.9. Co-Citations
The co-citation graph is an analytical technique applied to reveal the underlying relationship between documents and the structure of academic fields[72]. Its core is to identify the phenomenon that two or more documents are cited by a third subsequent document, thereby helping researchers to intuitively identify key documents, research hotspots, and the internal connections and development context between different directions in the field. In the co-citation graph presented in Figure 11, the dimension of the node corresponds to the citation frequency of the document: the larger the node, the more times the document has been cited and the more significant its influence. The color of the nodes changes over time, and the tones change from cold to warm, which intuitively presents the order of publication years: colder colors represent older documents, and the more reddish the color, the more recent the publication time. The arrows between nodes denote the co-citation relationship between documents. The existence of lines indicates that these documents are often cited by subsequent studies, thus reflecting their relevance in content or subject matter[19,73].
Analysis of Figure 10 demonstrates that the node corresponding to Ji J (2017) is the largest, indicating that its literature has been cited the most frequently, reaching 11 times. Furthermore, its betweenness centrality is 0.09, ranking first among all nodes. The authors presented an integrated framework for autonomous vehicle path planning and tracking. The framework generates collision avoidance trajectories by constructing a three-dimensional virtual hazard APF and uses multi-constraint MPC to achieve path tracking[74]. This method has demonstrated good collision avoidance results in a variety of scenarios, with excellent dynamic performance and control stability, and therefore has high academic value and influence. Following closely behind are the nodes of Paden B (2016) and Andersson JAE (2019), both with 9 citations. Paden B (2016) has a betweenness centrality of 0 and few co-citation links, indicating a weaker bridging role within the knowledge network. This phenomenon may be related to the fact that studies citing this paper tend to focus on reviewing context and achievement goals, rather than using it as a direct theoretical foundation for in-depth research. In contrast, Andersson JAE (2019) not only has a betweenness centrality of 0.07 but also exhibits a high number of co-citation links, reflecting its more significant influence within the structure. The open source numerical optimization framework CasADi[75] introduced by Andersson JAE provides key tool support for algorithm modeling and optimization solutions in related fields, and has therefore received widespread attention and citation in research.
In addition, nodes such as Guo HY (2019), Zhang XJ (2021), Rasekhipour Y (2017) and Schwarting W (2018) also performed outstandingly in both citation frequency and betweenness centrality indicators, indicating that these documents are not only widely cited, but also play a key intermediary role in knowledge flow, confirming their core academic influence in this research field.
4. Discussion
Path planning and trajectory tracking of autonomous vehicles have been a hot area of global research in recent years, and its development has lasted for decades. Although relevant research has been carried out since the 20th century, it was not until the early 2000s that substantial results and effective progress were achieved, driven by the autonomous driving competition held by the U.S. Defense Advanced Research Projects Agency (DARPA)[75]. From the initial attempts to use various sensors and verify the feasibility of different algorithms, to the subsequent simulation of driving in an urban environment, strictly abiding by traffic rules and actively avoiding other vehicles, this marks the transition of autonomous driving technology from the relatively simple wild environment to the complex and rule-driven urban environment[54]. As more and more car companies and technology companies enter the market, fully autonomous vehicles are steadily moving towards the goal of commercialization.
So, given the current rapid development of autonomous vehicle path planning and trajectory tracking, what will be its future direction? Based on bibliometric analysis, this article combines research areas with key keywords and links them to timelines, focusing on the perspective of hot research topics.
4.1. Research on the Application of Path Planning and Trajectory Tracking Based on Vehicle Model
The vehicle model is a mathematical abstraction of the vehicle's motion characteristics. It appears frequently in the keyword analysis above and can generally be divided into kinematic and dynamic models. The essence of model selection is to make a comprehensive trade-off between accuracy, real-time performance and control performance. Ji et al. [76] clearly pointed out that whether it is path planning for lane changes or trajectory tracking using MPC, an accurate model is needed to predict the vehicle's motion state in the future. Deng et al. [77] explored how to select a suitable vehicle model as a prediction model in MPC. The authors pointed out that it is crucial to strike a balance between the accuracy of the model and the computational complexity when selecting a model. They also mentioned that although more complex models can provide more accurate results, the amount of computation will also be greater, which will reduce the response speed of the control system. Therefore, a two-wheel three-degree-of-freedom model was selected as the prediction model. This model has a small error when tracking the vehicle trajectory and can output an ideal curve. Barcelo et al. [78] specifically discussed the issue of degree of freedom selection in vehicle modeling, pointing out that although more complex models can provide more accurate results, they require solving more ordinary differential equations, resulting in higher computational costs. The authors compared vehicle models with different degrees of freedom, including a 3-degree-of-freedom (DOF) bicycle model and a more complex 14-DOF full-vehicle model, pointing out that a 3-DOF model is sufficient in the conceptual design stage. Although building a more complex model is not an immediate need at present, it is crucial for comprehensively improving the ride comfort and personalized driving performance of autonomous vehicles in the future.
Leveraging the principle of MPC, Qiao et al. [79] used kinematic and dynamic models as prediction models, designed two trajectory tracking controllers, and conducted simulation experiments. The results showed that both controllers had good dynamic tracking performance. The dynamic model demonstrated slightly superior performance compared to the kinematic model in both following effect and control smoothness, but under the same working conditions, its operation time was longer. Zhou et al.[80] investigated the trajectory tracking problem for a four-wheel independent steering (4WIS) vehicle under extreme conditions on intermittent ice-snow roads. Their study utilized a composite control method integrating sliding mode control (SMC) and tube model predictive control (Tube-MPC), based on a lateral 2-DOF dynamic model. The results showed that this method achieved a reduction of 0.54 m in the maximum lateral tracking error and the heading angle deviation by about 2.4 degrees under low adhesion roads (μ=0.4). This scenario is characterized by an extremely low road adhesion coefficient, coupled with significant time-varying tire characteristics. The traditional kinematic model has obvious limitations in such scenarios[34]. This clearly demonstrates the necessity of high-order control algorithms based on dynamic models in low-adhesion and complex working conditions. In the selection of vehicle kinematic and dynamic models, basic scenarios can usually be effectively described by kinematic models; however, when faced with complex driving conditions, dynamic models often exhibit higher model applicability and control robustness due to their in-depth characterization of system coupling characteristics and mechanical responses[81]. Future developments in this field will focus on lightweight and intelligent models[82] and deeply integrate machine learning methods to learn dynamic features and behavior patterns from system operations in a data-driven manner, rather than relying entirely on traditional precise physical modeling based on first principles.
4.2. Research on Data-Driven MPC for Path Planning and Trajectory Tracking
In the keyword co-occurrence analysis, model predictive control also emerged as a core research hotspot in this field, showing a significant outbreak trend, especially between 2017 and 2023. This algorithm effectively models the driver's underlying path-tracking behavior and decision-making logic. The framework uses the current vehicle motion state and a dynamic model to forecast the future motion trajectory and critical dynamic states over a finite horizon. By solving the online solution of a finite-horizon optimal control problem, the control input of the vehicle is calculated in real time, thereby achieving high-precision path tracking control[83]. With its inherent multi-constraint processing capability, the algorithm can effectively integrate road geometry parameters and vehicle kinematic constraints into trajectory tracking control, thereby ensuring robust feasibility and enhanced operational safety[81].
Based on the traditional MPC framework, more scholars continue to promote the performance optimization of algorithm content details. Sun et al.[84] developed an improved model predictive control (IMPC) approach method for achieving safe and efficient lane change operations. This method constructs a simplified vehicle model based on vehicle state and environmental information and uses a sigmoid function to constrain vehicle motion. A finite state machine (FSM) is used to select appropriate operations based on real-time driving conditions, and a discrete simplified dual neural network (SDNN) is introduced to quickly solve the quadratic programming problem to efficiently obtain the longitudinal and lateral accelerations required for lane change, braking, and overtaking. In practical applications, the significant nonlinear characteristics of vehicle models make it difficult for traditional modeling technologies to simultaneously achieve a balance between computational accuracy and real-time performance. To address this challenge, researchers such as Hobbani[85] proposed an innovative real-time feasible modeling and parameter identification method that employs a combined approach using particle swarm optimization (PSO) and the information criterion. By using the PSO algorithm to efficiently identify vehicle dynamic parameters and combining the information criterion to optimize the model structure, this approach notably reduces the computational burden while ensuring model accuracy, thereby providing a reliable and efficient model foundation for real-time vehicle control.
Currently, learning-based MPC(LB-MPC) has become a hot research topic in the field of model predictive control. This approach uses a well-trained data-driven model as a predictive model, integrating the excellent multi-constraint handling capabilities of MPC. Leveraging a more accurate predictive model, LB-MPC demonstrates enhanced robustness, particularly under extreme vehicle dynamics conditions. Han et al.[86] developed a learning-based model predictive path tracking control strategy. They constructed a 2-DOF single-track dynamic model of the vehicle, analyzed the single-step response error law of this model and the IPG Truck Maker model, and designed a method for constructing and rolling updating the error dataset. An error fitting model was established through Gaussian Process Regression (GPR), enabling real-time error compensation for the single-track model. Following this, the corrected model served as the prediction basis, with a dedicated cost function designed for path tracking, and a quadratic programming optimization problem was formulated, resulting in a LB-MPC framework for path tracking architecture. Xiao et al.[87] developed a modeling and control method for autonomous vehicles that combines deep neural networks with the Koopman operator. This method uses deep learning to extend the dynamic mode decomposition algorithm, learns the finite-dimensional approximation of the Koopman operator, and designs a data-driven model predictive controller based on this. This not only improves the generalization ability and interpretability of the controller but also makes it demonstrate superior performance in autonomous vehicle path tracking applications. High-fidelity CarSim simulations validate the effectiveness of the proposed method, showing that this method not only achieves high modeling accuracy over a wide operating range, but also has significant advantages in modeling performance over previous methods.
When facing more unknown and complex scenarios, we expect vehicles to have the ability to self-evolve in the implementation of specific functions. Yang et al.[88] achieved a novel integration of model-based and model-free reinforcement learning, developing a method that leverages their respective advantages and proposed an integrated autonomous driving lane change strategy architecture based on a driving tendency network. They formulated the problem as a reinforcement learning task and designed a comprehensive reward function to holistically address the decision-making and planning optimization. By applying the Temporal Difference Model Predictive Control (TD-MPC) algorithm, an internal model was designed to predict future states and rewards, enabling local trajectory refinement within a short-term horizon. Parameter optimization of the driving tendency network was achieved through temporal difference learning based on long-term reward estimation. The method's effectiveness was demonstrated through extensive testing in a high-fidelity simulation environment. The results showed that compared with traditional rule schemes, this method not only ensured driving efficiency but also significantly improved safety and comfort. In addition, compared with the soft actor-critic algorithm (SAC), this method achieved a 7 to 9 times improvement in learning efficiency.
At the same time, more meta-learning methods are being actively explored. For example, by enabling the Koopman model[87] to quickly adapt to new vehicles or environments, efficient learning can be achieved with minimal data, and the Koopman framework is applied to vehicle-to-everything (V2X) scenarios. These methods are expected to achieve safer and more coordinated planning and control behaviors.
4.3. Research on the Application of Decision-Making Methods Based on Game Theory in Path Planning and Trajectory Tracking
Traditional path planning algorithms are generally predicated on the assumption of a static environment or considering the trajectories of other intelligent agents as known and fixed. However, in highly dynamic and highly interactive scenarios (such as autonomous driving on urban roads), such assumptions are difficult to hold. In reality, the decisions of intelligent agents are coupled to each other, and each party is often unable to accurately know the other party’s specific goals (such as aggressiveness or conservatism) and decision-making model[89]. Such interactions contain both conflicting goals (such as competition for spatial resources) and common interests (such as avoiding collisions), showing typical game characteristics.
Game theory offers a powerful mathematical foundation for modeling such interactive decision-making processes among multiple intelligent agents[90]. This framework can solve game solutions such as Nash equilibrium and formulate the optimal response or equilibrium strategy for our side while fully considering the possible reactions of the other side. Applying game theory to path planning and trajectory tracking means that other intelligent agents (vehicles, pedestrians, etc.) are no longer simply viewed as obstacles, but as game participants with autonomous decision-making capabilities, their own goals, and the ability to respond rationally to our actions[91]. This method is particularly suitable for intense interaction scenarios such as merging and intersections. By predicting and optimizing the interaction results through mathematical models, it significantly improves the decision-making intelligence and drive safety of autonomous vehicles in dynamic environments.
Zhang et al.[92] proposed a Stackelberg differential game-based model predictive control (DGTMPC) framework to address complex interaction and control problems in highway autonomous driving. The framework adopts a hierarchical structure: in the upper layer, vehicle interactions are modeled as a Stackelberg differential game, where the leader makes decisions first and the follower responds accordingly, with both vehicles utilizing MPC for motion planning. The differential game is framed as a bilevel optimization problem, representing the objectives of the leader and the follower, and solved via a branch-and-bound algorithm. In the lower layer, a hybrid MPC is employed to simultaneously manage longitudinal dynamics (speed and acceleration) and discrete lane-level decisions (e.g., lane keeping or lane changing).
Furthermore, to improve the ability to identify the behavioral intentions of surrounding vehicles, this method also introduces an inverse MPC algorithm to estimate the target vehicle's behavioral pattern. Experimental results show the significant effectiveness and superiority of the proposed framework in interactive lane-changing scenarios. Zhang et al.[93] proposed a Stackelberg game-based motion planning framework for autonomous driving to optimize vehicle behavior in dynamic interactive scenarios. The framework utilizes a hybrid path planner to model coupling relationships among traffic participants. Furthermore, it integrates a Stackelberg game-theoretic velocity planner with a quantitative leader-follower model, enabling autonomous vehicles to accurately anticipate other agents' responses and adapt their behavior accordingly. Through velocity planning optimization under corresponding strategies, the framework enhances autonomous vehicle control performance in interactive scenarios.
In the early prototyping of autonomous vehicles, the initial approach was to ensure strict adherence to predefined traffic rules. However, it soon became evident that this was insufficient, as vehicles also needed to comply with certain unwritten human driving rules to integrate more naturally into the traffic environment. To address these challenges, Zanardi et al. [94] introduced a game-theoretic model termed Posetal Games. This model represents each participant’s preferences over outcomes using a partially ordered set, thereby integrating agents’ hierarchical priorities with environmental interaction characteristics. It is designed to tackle decision-making problems in multi-agent systems and has demonstrated particular effectiveness in trajectory selection for autonomous vehicles. In urban autonomous driving scenarios, unwritten rules are more complex, and decision-making at unsignalized intersections is particularly challenging due to the lack of absolute regulations. To address this issue, Yi et al. developed a new framework for decision-making that leverages the concepts of intention prediction and mixed-strategy Nash equilibrium[95]. First, a combination of Gaussian Mixture Model–Hidden Markov Model (GMM-HMM) and SVM algorithms is used to predict the target vehicle’s driving intention at intersections (proceed to the left, to the right, or continue along the current path). Next, a trajectory fitting module leverages Bezier curves to generate the target vehicle's predicted trajectory, based on the predicted intentions and road structure. By comparing this trajectory with that of the ego vehicle through an s-t diagram, potential spatiotemporal conflict points are identified. If conflicts exist, the mixed-strategy Nash equilibrium approach is applied to select the ego vehicle’s driving mode (yield or proceed). This method effectively avoids unnecessary early deceleration due to overly conservative behavior while preventing collisions or abrupt braking from overly aggressive maneuvers. Finally, based on the selected driving mode, the planning module leverages an MPC algorithm to derive the optimal acceleration strategy. Vehicle tests demonstrate that this decision-making framework ensures the ego vehicle can safely and comfortably navigate intersections. Therefore, game-theoretic decision frameworks can effectively balance safety, efficiency, and scalability while achieving reasonable decision-making in complex and dynamic driving behaviors.
4.4. Research on the Application of Partially Observable Markov Decision Process (POMDP) in Path Planning and Trajectory Tracking
In real-world driving environments, the primary challenges for autonomous vehicles arise from partial observability and uncertainty. For instance, due to limitations in sensing range and the coexistence of blind spots, vehicles may fail to detect pedestrians or other vehicles occluded by large vehicles or buildings, and the future behaviors of these traffic participants are inherently uncertain. POMDPs represent a principled approach to address such problems by maintaining a probabilistic belief over the intentions of other traffic participants and enabling optimal decision-making based on this belief.
To mitigate the aforementioned limitations, Kollarcik et al. [96] proposed a POMDP-based planning approach to handle uncertainty. Their methodology leverages the Adaptive Belief Tree (ABT) algorithm to address the POMDP problem approximately. The study first discretized the topology of intersections to facilitate the construction of the POMDP model. Additionally, a dynamic model was designed with the aim of predicting the evolution of vehicle states, including kinematic states like position and velocity, as well as an observation model was used to relate these states to actual observations, which may include noise. The results demonstrate that this approach can successfully plan collision-free trajectories across a series of simulation experiments, which utilize real-world traffic data from two different intersections. Jin et al. proposed a planning algorithm called BoT-Drive, which also addresses behavioral and trajectory-level uncertainties within the POMDP framework. Through driver models, BoT-Drive represents unknown behavioral intentions, enabling the inference of hidden driving styles from the model parameters. Framing the driver model as the AV's decision-making behavior enables BoT-Drive to significantly alleviate the inherent exponential complexity of POMDPs. For improved safety and robustness, the planner employs importance sampling, utilizing high-level planned behaviors to refine driving trajectories. When benchmarked against state-of-the-art planning and learning-based methods on real-world data, BoT-Drive consistently surpasses them in diverse urban settings, from typical to complex, showcasing marked enhancements in driving safety and operational reliability[97].
To address the limitations of traditional behavioral decision-making methods in handling environmental uncertainty, which may lead to suboptimal decisions, existing studies have shown that approaches based on POMDPs demonstrate significant advantages over conventional reactive decision-making methods in terms of both traffic efficiency and safety[98].
4.5. Research on the Application of Path Planning and Trajectory Tracking Based on End-To-End Reinforcement Learning
In rule-based approaches, the environment is typically abstracted as a grid map or a sampling-based point set, and specific search algorithms are employed to compute a collision-free trajectory between the start and goal positions, often subject to certain optimality criteria. Subsequently, a controller enforces strict tracking of a preplanned spatiotemporal trajectory[99]. This approach offers strong interpretability and high execution efficiency, and it can guarantee optimal solutions in simple environments. However, when the environment changes dynamically, the entire graph structure must be updated, potentially triggering a re-search and significantly increasing computational load[100]. Furthermore, as the state-space dimensionality increases, search efficiency drops sharply, which can lead to computational delays or stalling and, consequently, pose safety risks.
In contrast, path planning driven by RL and trajectory tracking methods train the vehicle in a variety of random scenarios to learn a strategy that directly outputs high-reward actions. These methods have the ability to adaptively adjust control behavior, effectively handle the complex nonlinear characteristics of the system, and demonstrate greater adaptability to dynamic environments. He et al. introduced a path planning and trajectory tracking algorithm built upon the Asynchronous Multi-threaded Proximal Policy Optimization (AMPPO) method[101]. By leveraging AMPPO, the computationally expensive online decision-making process is converted into offline training, enabling vehicles to autonomously learn planning, tracking, and emergency avoidance behaviors. The method mitigates the sparse reward problem by refining rewards at each time step and employing reward shaping techniques, while a goal-distance heuristic reward function is introduced to enhance directional guidance during exploration. Nevertheless, reinforcement learning approaches face several challenges: they require training over millions of simulated or real-world trials, which is costly[102]; they encounter sim-to-real transfer difficulties; and the design of reward functions must be carefully considered to ensure their validity and effectiveness.
Although rule-based methods have certain limitations, their stability still has irreplaceable advantages[103]. Therefore, traditional rule-based methods can be combined with reinforcement learning to form complementary fusion architecture. For example, RL can be used to adaptively adjust and optimize traditional controller parameters[104]. Wen et al.[105] proposed a hybrid control algorithm that combines Deep Deterministic Policy Gradient (DDPG) with MPC to enhance overall system performance. Another approach involves pretraining RL policies using demonstration data generated by rule-based methods, thereby accelerating convergence and improving initial performance. In related work[106], data produced by MPC was used to train deep neural networks via imitation learning, which was then integrated into the DDPG framework with a feedforward exploration mechanism, significantly improving both learning efficiency and policy generalization.
A hierarchical hybrid decision architecture can also be adopted[102]: the upper layer generates a coarse-grained collision-free reference path or a series of sub-target points based on rule logic; the lower layer relies on a policy network trained by reinforcement learning to output specific control instructions (such as velocity and orientation angle). To further ensure the robustness and safety of the system, the analysis methods of Lyapunov stability theory and traditional control theory can be integrated into the reinforcement learning framework, for example, by designing a reward function or constraint condition based on the Lyapunov function to provide stability guarantees for the learning strategy[107]. A team from Tongji University proposed an online evolutionary decision-making framework for autonomous driving[108], which integrates data-driven deep reinforcement learning (DRL) with model-driven MPC to enable online learning and evolution of autonomous vehicles during operation. The framework follows a “longitudinal-priority, lateral-secondary” human-like decision logic, enhancing the interpretability of decisions. In the CARLA simulation environment, the framework achieved an 87% consistency with human driving behavior.
Although significant progress has been made in applying reinforcement learning to path planning and trajectory tracking[109], numerous challenges and opportunities for further development remain. With the continuous advancement of machine learning techniques, future research may focus on joint optimization across different hierarchical levels, the development of reinforcement learning algorithms with stability and safety guarantees[107], and the construction of more efficient multi-agent communication and coordination architectures.
Synthesizing the analysis and discussion of the five research hotspots mentioned above, the current research and future progress of autonomous vehicle path planning and trajectory tracking is summarized below: (1) Vehicle models are divided into kinematic models and dynamic models. The choice of models requires a trade-off between accuracy, real-time performance, and control performance. Accurate models are the basis for effective control, and different models have their own advantages in different scenarios. In the future, vehicle models will integrate machine learning technology and learn dynamic features in a data-driven way to improve performance and achieve lightweight and intelligent development. (2) As a core research hotspot in this field, MPC has significantly improved its performance in complex scenarios through the integration of machine learning and meta-learning methods, achieving high-precision path tracking and safe and efficient driving capabilities under the continuous optimization of researchers. (3) Game theory is widely used in path planning and trajectory tracking. By modeling the interactive decision-making process of multiple agents and considering the autonomous decision-making capabilities and reactions of other agents, it can achieve more intelligent and safe dynamic environment decision-making, especially in complex interactive scenarios (such as merging and intersections). (4) POMDP is used to deal with environmental uncertainty and partial observability. It makes optimal decisions by maintaining a probability distribution belief about surrounding agents' intent, which can improve the efficiency and safety of vehicles in complex environments. (5) Rule-based and reinforcement learning-based path planning and trajectory tracking methods each have their own advantages and disadvantages. A hybrid architecture that combines the advantages of both can improve the adaptability and the safety challenge for autonomous vehicles posed by dynamic environments. Future research will focus on multi-level joint optimization, the stability and security of reinforcement learning algorithms, and the efficiency of multi-agent collaborative architectures.
Overall, research in the domain of path planning and trajectory tracking for autonomous systems is moving toward multidisciplinary integration. By integrating kinematic and dynamic models, MPC, game theory, POMDPs, and rule-based and reinforcement learning methods, combined with machine learning techniques and data-driven dynamic feature learning, lightweight and intelligent vehicle models can be constructed to improve decision-making intelligence and driving safety in complex dynamic environments. This will become a key development direction for future autonomous driving technology.
5. Conclusions and Future Work
5.1. Conclusions
This article, using literature visualization software, created a knowledge graph and conducted a multi-dimensional visualization analysis of the literature in the field of autonomous driving path planning and trajectory tracking from 2000 to 2025, covering publication volume, influential authors, core institutions, major publishing institutions, keyword co-occurrence, and co-citations. By thoroughly analyzing keyword-related research hotspots, we comprehensively reviewed research progress in this field and reached the following conclusions:
- (1)
- In terms of the number of publications and the time of publication, research in the field of autonomous vehicle path planning and trajectory tracking has been on the rise, especially in the past five years.
- (2)
- In terms of main authors, Li Keqiang's team at Tsinghua University ranks first in terms of the number of publications and citation frequency, with strong academic influence and wide recognition; other influential authors include Chen Yimin's team and Bitar Glenn's team.
- (3)
- Tsinghua University, the Norwegian University of Science and Technology (NTNU), and the Beijing Institute of Technology (BIT) lead this field in both publication volume and citation impact. Their prolific output establishes them as the foremost research institutions.
- (4)
- The main contributions in this field originate from a select group of countries, namely China, the United States, Norway, India, and the United Kingdom. Furthermore, China exhibits the most extensive international collaboration network, working closely with partners such as the United States, Australia, and Canada.
- (5)
- In terms of publishing institution influence, IEEE, Elsevier, and MDPI are the main publishing platforms, accounting for 76% of the total publication volume. Among them, IEEE has a particularly significant influence due to its authoritative position in the field of electrical and electronic engineering.
- (6)
- From the perspective of research field distribution, engineering, electrical and electronic engineering, automated control systems, and computer science are the main research directions in this field. The publication frequency and betweenness centrality values of these fields are relatively high, indicating that they occupy a core position in academic research.
- (7)
- Keyword co-occurrence results show that trajectory tracking, trajectory planning, motion planning, and model predictive control appear most frequently, reflecting the core technologies in this field. A keyword emergence analysis identifies deep learning and reinforcement learning as rising trends, highlighting their growing application in creating path planning and trajectory tracking solutions for autonomous vehicles.
- (8)
- Judging from the co-citation map of the literature, the literature nodes of Ji J (2017), Paden B (2016) and Andersson JAE (2019) are the largest, among which the literature of Ji J (2017) ranks first in both citation frequency and betweenness centrality, highlighting the important position of the author in this subject field.
6. Future Work
Research interest in the field of path planning and trajectory tracking for autonomous vehicles continues to rise, with the number of publications reaching new historical peaks year by year. This not only reflects the rapid development of autonomous driving technology but also reflects the accelerated advancement of its marketization and commercialization process. However, only vehicles that reach Level 4 or higher are truly considered autonomous vehicles. Within the system's designed operational domain (ODD), these vehicles are capable of safely and autonomously completing driving tasks without human intervention. However, this also complicates the allocation of responsibility for accidents. Therefore, from a technical perspective, the robustness and safety of autonomous vehicle path planning and trajectory tracking still need to be further improved, especially when interacting with other traffic participants, so that they can make safe and efficient decisions. In the future, the development direction of this field will mainly focus on the following two aspects:
- (1)
- In the future, as deep learning algorithms continue to evolve, end-to-end autonomous driving models will become the mainstream trend. These models integrate multiple modules, such as decision-making, planning, and control, into a unified neural network, directly mapping raw sensor inputs to vehicle control commands or driving trajectories. End-to-end learning avoids the information loss and error accumulation associated with traditional modular architectures, enabling joint optimization of all links and significantly improving the overall performance and generalization capabilities of the system. Large models based on the Transformer architecture, in particular, demonstrate significant potential for processing multimodal data, understanding complex scenarios, and long-term dependencies due to their powerful sequence modeling and parallel processing capabilities. As computing power increases and data volumes accumulate, autonomous driving models with larger parameters and stronger capabilities will continue to emerge. These models will combine advanced AI technologies such as reinforcement learning, imitation learning, and world models to enable vehicles to approach or even surpass human driving capabilities in path planning and trajectory tracking, providing stronger support for the safe and efficient operation of autonomous vehicles.
- (2)
- As a pivotal element of intelligent transportation systems, V2X technology offers robust support for the navigation and motion control of highly autonomous vehicles through improved path planning and trajectory tracking. Through V2X communication, vehicles can exchange information in real time with all relevant entities, encompassing surrounding vehicles (V2V), roadside infrastructure (V2I), pedestrians (V2P), and cloud networks (V2N/V2C), providing a broader perspective and earlier warnings. V2X technology can also help vehicles achieve collaborative driving, such as platooning, to improve traffic efficiency and reduce energy consumption. With the popularization of 5G/6G communication technology and the widespread deployment of roadside intelligent devices, V2X technology will be deeply integrated with single-vehicle intelligence to jointly build a safer, more efficient and smarter future transportation system, making the path planning and trajectory tracking of autonomous vehicles more accurate and reliable.
The content of this article still needs to be improved. First, the data source mainly relies on electronic databases. Even if the WoS is used in conjunction with the data, there may still be problems with missed or incorrect selection of literature. Future research could consider expanding data sources, incorporating more databases, and utilizing more efficient screening tools to improve the accuracy of literature screening. Secondly, currently used bibliometric software still relies on the researcher's judgment when clustering themes, which to some extent affects the objectivity of the results. Furthermore, the depth of current research on the application of keyword networks in bibliometric analysis still needs to be improved. With the continued advancement of deep learning and natural language processing technologies, future research in this field is expected to achieve a higher level of automation and precision. Deep learning models can effectively identify key information in texts, extract it as keywords, and construct network structures based on this information, thereby more clearly revealing the inherent connections and knowledge context between documents.
Author Contributions
Conceptualization, B.N.; methodology, B.N.; software, B.N.; investigation, B.N.; formal analysis, B.N.; validation, B.N.; data curation, B.N.; writing—original draft preparation, B.N.; writing—review and editing, B.N. and R.Y.D.; supervision, R.Y.D.; project administration, R.Y.D. All authors have read and agreed to the published version of the manuscript.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Acknowledgments
The authors would like to express their sincere gratitude to the supervisor, Roman Y. Dobretsov (R.Y.D.), for continuous guidance, valuable suggestions, and strong support throughout the research and manuscript preparation.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zhu, W. W. Local Path Planningand Tracking of Autonomous Driving Cars. Eng. Technol. II 2019. [Google Scholar] [CrossRef]
- Yan, P. K. Research on Unmanned Vehicle Path Planning and Trajectory Tracking Technology. 2024. [Google Scholar] [CrossRef]
- Dijkstra, E. W. A Note on Two Problems in Connexion with Graphs. Edsger Wybe Dijkstra: His Life, Work, and Legacy 2022, 45, 287–290. [Google Scholar] [CrossRef]
- Hart, P. E.; Nilsson, N. J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Man Cybern. Syst. 1968, 4(2), 100–107. [Google Scholar] [CrossRef]
- Meng, S. L. LLM-A*: Large Language Model Enhanced Incremental Heuristic Search on Path Planning. 2025. [Google Scholar] [CrossRef]
- Chiang, H. T. L.; Hsu, J.; Fiser, M.; Tapia, L.; Faust, A. RL-RRT: Kinodynamic Motion Planning via Learning Reachability Estimators From RL Policies. IEEE Robot. Autom. Lett. 2019, 4(4), 4298–4305. [Google Scholar] [CrossRef]
- Xu, W. D.; Pan, J.; Wei, J. Q.; Dolan, J. M. Motion Planning under Uncertainty for On-Road Autonomous Driving. IEEE ICRA 2014, 2507–2512. [Google Scholar] [CrossRef]
- Nguyen, H. D.; Vu, M. N.; Nam, N. N.; Han, K. Ieee Hierarchical Motion Planning and Offline Robust Model Predictive Control for Autonomous Vehicles. American Control Conference (ACC) 2024, 4936–4941. [Google Scholar] [CrossRef]
- Ding, W. C.; Zhang, L.; Chen, J.; Shen, S. J. Safe Trajectory Generation for Complex Urban Environments Using Spatio-Temporal Semantic Corridor. IEEE Robot. Autom. Lett. 2019, 4(3), 2997–3004. [Google Scholar] [CrossRef]
- Zhang, D. K.; Liang, J. M.; Guo, K.; Lu, S.; Wang, Q.; Xiong, R.; Miao, Z. W.; Wang, Y. CarPlanner: Consistent Auto-regressive Trajectory Planning for Large-scale Reinforcement Learning in Autonomous Driving. CVPR 2025. [Google Scholar] [CrossRef]
- Han, Z. C.; Tian, M. Z.; Gongye, Z.; Xue, D. L.; Xing, J. X.; Wang, Q. H.; Gao, Y. M.; Wang, J. P.; Xu, C.; Gao, F. Hierarchically depicting vehicle trajectory with stability in complex environments. Sci. Robot. 2025, 10(103), 15. [Google Scholar] [CrossRef] [PubMed]
- Deng, J. X.; Zha, Y. F. Overview of the Development of Autonomous Vehicle Path TrackingControl. Automot. Dig. 2023, (5), 1–8. [Google Scholar] [CrossRef]
- Lu, A.; Lu, Z. W.; Li, R. F.; Tian, G. Y. Adaptive LQR Path Tracking Control for 4WS Electric Vehicles Based on Genetic Algorithm. 2022 6th CAA International Conference on Vehicular Control and Intelligence (CVCI); 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Zhao, C. Y.; Li, B. Q.; Zhu, C. F.; Shi, W. X.; Zhang, X. B. Lateral Control for UGVs by ADRC With Modeling Compensation and Expanded Disturbance Observation. IEEE Trans. Ind. Electron. 2025, 72(9), 9354–9366. [Google Scholar] [CrossRef]
- Zang, Y. H.; Yang, A. X.; Li, L. Y. Trajectory Tracking Control Method Based on Curvature-adaptive LTV-MPC J. Anhui Polytech. Univ. 2025, 40(01), 22–30. [Google Scholar]
- Zhang, T.; Jiao, X. H.; Li, X. K. Improved adaptive iterative learning trajectory tracking control with adaptive high-order internal model for autonomous farming vehicle. Comput. Electron. Agric. 2025, 236, 11. [Google Scholar] [CrossRef]
- Yang, D. S.; Liu, D.; Han, B.; Lu, G. X.; Kong, L. G.; Huang, C. S.; Li, J. Trajectory planning and tracking control for vehicles with tire blowout in complex traffic flows. Sci. China-Inf. Sci. 2025, 68(3), 22. [Google Scholar] [CrossRef]
- Wang, C. Y.; Zhang, Y. Z.; Zhang, Y.; Li, B. F. A bibliometric analysis of gastric cancer liver metastases: advances in mechanisms of occurrence and treatment options. Int. J. Surg. 2024, 110(4), 2288–2299. [Google Scholar] [CrossRef] [PubMed]
- Chen, C. M. CiteSpace II: Detecting and visualizing emerging trends and transient patterns in scientific literature. J. Am. Soc. Inf. Sci. Technol. 2006, 57(3), 359–377. [Google Scholar] [CrossRef]
- Dong, Y. B.; Pan, H. Z.; Wang, L.; Tang, Z. G. Bibliometric visualization analysis of soil salinization remote sensing. J. China Agric. Resour. Reg. Plann 2024, 45(9), 236–248. [Google Scholar] [CrossRef]
- Zhou, Y.; Cheng, Y.; Chen, X. Visual analysis of international knowledge sharing research hotspots and frontiers. Sci. Technol. Manag. 2022, 24(2). [Google Scholar] [CrossRef]
- Zhang, W. Y.; Cao, L. J.; Li, Y. F.; Ma, B.; Yang, K. H. Analysis of hotspots and frontiers of frailty research: a visualization analysis based on CiteSpace. Chin. J. Evid.-Based Med. 2020, 20(11), 1308–1315. [Google Scholar] [CrossRef]
- Yan, S. H.; Gao, Y. M.; Wang, H. R.; Li, J. S.; Wang, X. Y. Research status of agricultural brackish water irrigation based on CiteSpace. Sci. Soil Water Conserv. 2021, 19(5), 132–141. [Google Scholar] [CrossRef]
- Dong, H. B.; Liu, S. B.; Bolormaa, D.; Hou, X. Y. Research on domestic ecological compensation based on CiteSpace. Acta Ecol. Sin. 2020, 42(20), 8521–8529. [Google Scholar] [CrossRef]
- Li, W. Y. Analysis of the core authors of Archives Management from 1995 to 2005. File Manag. 2006, (04), 48–50. [Google Scholar]
- Chen, Y.; Chen, C. M.; Liu, Z. Y.; Hu, Z. G.; Wang, X. W. The methodology function of Cite Space mapping knowledge domains. Studies in Science of Science 2015, 33(02), 242–253. [Google Scholar] [CrossRef]
- Price, D. J. D. A general theory of bibliometric and other cumulative advantage processes. J. Am. Soc. Inf. Sci. 1976, 27(5-6), 292–306. [Google Scholar] [CrossRef]
- Chen, C. M.; Ibekwe-SanJuan, F.; Hou, J. H. The Structure and Dynamics of Co-Citation Clusters: A Multiple-Perspective Co-Citation Analysis. Arxiv 2010, arXiv:1002.1985. [Google Scholar]
- Kleinberg, J. Bursty and hierarchical structure in streams. Data Min. Knowl. Discov. 2003, 7(4), 373–397. [Google Scholar] [CrossRef]
- Zhu, B.; Jia, S. Z.; Zhao, J.; Han, J. Y.; Zhang, P. X.; Song, D. J. Review of Research on Decision-making and Planning for Automated Vehicles. ChinaJ.Highw.Transp 2023, 37(1). [Google Scholar] [CrossRef]
- Li, L. Z.; Ota, K. R.; Dong, M. X. Humanlike Driving: Empirical Decision-Making System for Autonomous Vehicles. IEEE Trans. Veh. Technol. 2018, 67(8), 6814–6823. [Google Scholar] [CrossRef]
- Xie, J. W.; Li, D. Design and Application of Autonomous Driving System based on Multi-sensor Fusion. ICMLCA; 2021. [Google Scholar]
- Gonzalez, D.; Perez, J.; Milanes, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17(4), 1135–1145. [Google Scholar] [CrossRef]
- Kong, J.; Pfeiffer, M.; Schildbach, G.; Borrelli, F. Kinematic and Dynamic Vehicle Models for Autonomous Driving Control Design. IEEE IV 2015, 1094–1099. [Google Scholar] [CrossRef]
- Raffo, G. V.; Gomes, G. K.; Normey-Rico, J. E.; Kelber, C. R.; Becker, L. B. A Predictive Controller for Autonomous Vehicle Path Tracking. IEEE Trans. Intell. Transp. Syst. 2009, 10(1), 92–102. [Google Scholar] [CrossRef]
- Bramer, W. M.; Rethlefsen, M. L.; Kleijnen, J.; Franco, O. H. Optimal database combinations for literature searches in systematic reviews: a prospective exploratory study. Syst. Rev. 2017, 6, 12. [Google Scholar] [CrossRef]
- Donthu, N.; Kumar, S.; Mukherjee, D.; Pandey, N.; Lim, W. M. How to conduct a bibliometric analysis: An overview and guidelines. J. Bus. Res. 2021, 133, 285–296. [Google Scholar] [CrossRef]
- Hu, C. P.; Hu, J. M.; Deng, S. L.; Liu, Y. A co-word analysis of library and information science in China. Scientometrics 2013, 97(2), 369–382. [Google Scholar] [CrossRef]
- Bornmann, L.; Ye, A.; Ye, F. Identifying "hot papers" and papers with "delayed recognition" in large-scale datasets by using dynamically normalized citation impact scores. Scientometrics 2018, 116(2), 655–674. [Google Scholar] [CrossRef]
- Bornmann, L.; Haunschild, R.; Mutz, R. Growth rates of modern science: a latent piecewise growth curve approach to model publication numbers from established and new literature databases. Hum. Soc. Sci. Commun. 2021, 8(1), 15. [Google Scholar] [CrossRef]
- Price, D. J. d. S. Networks of Scientific Papers. Science 1965, 149(3683), 510–515. [Google Scholar] [CrossRef]
- Nakis, N.; Çelikkanat, A.; Boucherie, L.; Lehmann, S.; Morup, M. Time to Cite: Modeling Citation Networks using the Dynamic Impact Single-Event Embedding Model. 27th International Conference on Artificial Intelligence and Statistics (AISTATS); 2024; p. 238. [Google Scholar] [CrossRef]
- Shibata, N.; Kajikawa, Y.; Takeda, Y.; Matsushima, K. Detecting emerging research fronts based on topological measures in citation networks of scientific publications. Technovation 2008, 28(11), 758–775. [Google Scholar] [CrossRef]
- Sheng, X. P.; Tang, Y. J. Research on open sharing cooperation from the perspective of open access journals: Taking Plos One citing articles as an example. Libr. Inf. Work. 2021, 65(23), 31–40. [Google Scholar] [CrossRef]
- Wang, F.; Zhou, J. J.; Li, X. J.; Zhou, X. F. Adaptive routing protocol based on ant algorithm for P2P networks. Comput. Eng. Appl. 2010, 46(17), 101–104. [Google Scholar] [CrossRef]
- Sahoo, A.; Dwivedy, S. K.; Robi, P. S. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Wang, S. Y.; Yu, J. A Bibliometric Research on Next-Generation Vehicles Using CiteSpace. Recycling 2021, 6(1). [Google Scholar] [CrossRef]
- Simoes, F.; Unay-Gailhard, I.; Mujcinovic, A.; Fernandes, B. How to Foster Rural Sustainability through Farming Workforce Rejuvenation? Looking into Involuntary Newcomers’ Spatial (Im)mobilities. Sustainability 2021, 13. [Google Scholar] [CrossRef]
- Purwanto, E. A Bibliometric Analysis of Trends and Collaborations in Autonomous Driving Research (2002-2024). Mechatron. Intell. Transp. Syst. 2024, 3(2). [Google Scholar] [CrossRef]
- Ozyurt, O.; Cagiltay, N. E.; Ozyurt, H.; Akgun, A. A systematic review and mapping of the literature of virtual reality studies in earth science engineering education. J. Pedagog. Res. 2021, 5(2), 237–256. [Google Scholar] [CrossRef]
- Feng, J. K.; Yang, Y. S.; Zhang, H. C.; Sun, S.; Xu, B. W. Path Planning and Trajectory Tracking for Autonomous Obstacle Avoidance in Automated Guided Vehicles at Automated Terminals. Axioms 2024, 13(1), 20. [Google Scholar] [CrossRef]
- Callon, M.; Courtial, J. P.; Turner, W. A.; Bauin, S. From translations to problematic networks: An introduction to co-word analysis. Soc. Sci. Inf. Sci. Soc. 1983, 22(2), 191–235. [Google Scholar] [CrossRef]
- Pourhatami, A.; Kaviyani-Charati, M.; Kargar, B.; Baziyad, H.; Kargar, M.; Olmeda-Gómez, C. Mapping the intellectual structure of the coronavirus field (2000-2020): a co-word analysis. Scientometrics 2021, 126(8), 6625–6657. [Google Scholar] [CrossRef] [PubMed]
- Paden, B.; Cap, M.; Yong, S. Z.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE T. Intell. Veh. 2016, 1(1), 33–55. [Google Scholar] [CrossRef]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13(2), 99–108. [Google Scholar] [CrossRef]
- Schwarting, W.; Alonso-Mora, J.; Rus, D. Planning and Decision-Making for Autonomous Vehicles. Annu. Rev. Control Robot. Auton. Syst. 2018, 1, 187–210. [Google Scholar] [CrossRef]
- Lee, S. H.; Lee, Y. O.; Son, Y.; Chung, C. C. Multirate Active Steering Control for Autonomous Vehicle Lateral Maneuvering. IEEE IV 2012, 772–777. [Google Scholar] [CrossRef]
- Yu, S. Y.; Hirche, M.; Huang, Y. J.; Chen, H.; Allgöwer, F. Model predictive control for autonomous ground vehicles: a review. Auton. Intell. Syst. 2021, 1(1). [Google Scholar] [CrossRef]
- Dixit, S.; Fallah, S.; Montanaro, U.; Dianati, M.; Stevens, A.; McCullough, F.; Mouzakitis, A. Trajectory planning and tracking for autonomous overtaking: State-of-the-art and future prospects. Annu. Rev. Control. 2018, 45, 76–86. [Google Scholar] [CrossRef]
- Ding, Q. X.; Jiang, W. J.; Tong, T.; Wang, Q.; Ma, Y. H. Bibliometric Analysis of Soil Quality RemoteSensing Literature Based on CiteSpace. Chin. J. Soil Sci. 2023, 54(03), 721–729. [Google Scholar] [CrossRef]
- Kuutti, S.; Bowden, R.; Jin, Y. C.; Barber, P.; Fallah, S. A Survey of Deep Learning Applications to Autonomous Vehicle Control. IEEE Trans. Intell. Transp. Syst. 2021, 22(2), 712–733. [Google Scholar] [CrossRef]
- Luo, Y. G.; Xiang, Y.; Cao, K.; Li, K. Q. A dynamic automated lane change maneuver based on vehicle-to-vehicle communication. Transp. Res. Pt. C-Emerg. Technol. 2016, 62, 87–102. [Google Scholar] [CrossRef]
- Zhang, W. B.; Jiang, L. J.; Ge, X. X.; Wang, Y. J.; Liang, J.; Li, Y. H. Hot spot analysis and future prospect of rural homestead research in China:Quantitative analysis based on CNKI and CiteSpace. J. Arid Land Resour. Environ. 2022, 36(1), 16–25. [Google Scholar] [CrossRef]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Rusu, A. A.; Veness, J.; Bellemare, M. G.; Graves, A.; Riedmiller, M.; Fidjeland, A. K.; Ostrovski, G.; Petersen, S.; Beattie, C.; Sadik, A.; Antonoglou, I.; King, H.; Kumaran, D.; Wierstra, D.; Legg, S.; Hassabis, D. Human-level control through deep reinforcement learning. Nature 2015, 518(7540), 529–533. [Google Scholar] [CrossRef]
- Fossen, T. I.; Pettersen, K. Y.; Galeazzi, R. Line-of-Sight Path Following for Dubins Paths With Adaptive Sideslip Compensation of Drift Forces. IEEE Trans. Control Syst. Technol. 2015, 23(2), 820–827. [Google Scholar] [CrossRef]
- Eskandarian, A.; Wu, C. X.; Sun, C. Y. Research Advances and Challenges of Autonomous and Connected Ground Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22(2), 683–711. [Google Scholar] [CrossRef]
- Shen, C.; Shi, Y.; Buckham, B. Integrated Path Planning and Tracking Control of an AUV: A Unified Receding Horizon Optimization Approach. IEEE-ASME Trans. Mechatron. 2017, 22(3), 1163–1173. [Google Scholar] [CrossRef]
- You, F.; Zhang, R. H.; Lie, G.; Wang, H. W.; Wen, H. Y.; Xu, J. M. Trajectory planning and tracking control for autonomous lane change maneuver based on the cooperative vehicle infrastructure system. Expert Syst. Appl. 2015, 42(14), 5932–5946. [Google Scholar] [CrossRef]
- Antonelli, G.; Chiaverini, S.; Fusco, G. A fuzzy-logic-based approach for mobile robot path tracking. IEEE Trans. Fuzzy Syst. 2007, 15(2), 211–221. [Google Scholar] [CrossRef]
- Chai, R. Q.; Liu, D. R.; Liu, T. H.; Tsourdos, A.; Xia, Y. Q.; Chai, S. C. Deep Learning-Based Trajectory Planning and Control for Autonomous Ground Vehicle Parking Maneuver. IEEE Trans. Autom. Sci. Eng. 2023, 20(3), 1633–1647. [Google Scholar] [CrossRef]
- Zuo, Z. Q.; Yang, X.; Li, Z.; Wang, Y. J.; Han, Q. N.; Wang, L.; Luo, X. Y. MPC-Based Cooperative Control Strategy of Path Planning and Trajectory Tracking for Intelligent Vehicles. IEEE T. Intell. Veh. 2021, 6(3), 513–522. [Google Scholar] [CrossRef]
- Marshakova, I. V. System of document connections based on references. Nauchn.-Tekh. Inf., Ser. 2 Inf. Protsessy Sist. 1973, (6), 3–8. [Google Scholar]
- White, H. D.; McCain, K. W. Visualizing a discipline: An author co-citation analysis of information science, 1972-1995. J. Am. Soc. Inf. Sci. 1998, 49(4), 327–355. [Google Scholar] [CrossRef]
- Ji, J.; Khajepour, A.; Melek, W. W.; Huang, Y. J. Path Planning and Tracking for Vehicle Collision Avoidance Based on Model Predictive Control With Multiconstraints. IEEE Trans. Veh. Technol. 2017, 66(2), 952–964. [Google Scholar] [CrossRef]
- Andersson, J. A. E.; Gillis, J.; Horn, G.; Rawlings, J. B.; Diehl, M. CasADi: a software framework for nonlinear optimization and optimal control. Math. Program. Comput. 2019, 11(1), 1–36. [Google Scholar] [CrossRef]
- Ji, J.; Tang, Z. R.; Wu, M. Y.; Fang, J. C. Path Planning and Tracking for Lane Changing Based on Model Predictive Control. China J. Highw. Transp. 2018, 31(04), 172–179. [Google Scholar] [CrossRef]
- Deng, G. H.; Xiao, H. X.; Han, L. H.; Wu, P. F.; Zhang, Y.; Qin, L. Vehicle Tracking Control of Lateral and Longitudinal Based on Model Predictive Control. 2021, 35(11), 18–26+57. [Google Scholar] [CrossRef]
- Pardo, B. J. D. Optimisation of racing car suspensions featuring inerters. 2012. [Google Scholar]
- Qiao, B. S.; Feng, Y.; Jiang, Z. W.; Yang, Z. Y. Comparison of Intelligent Vehicle Track Tracking Method Based onModel Predictive Control. J. Hubei Univ. Automot. Technol. 2020, 34(02), 24–28+34. [Google Scholar] [CrossRef]
- Zhou, X. C.; Liu, R. Q.; Zhou, J. Y.; Zhang, Z. Y.; Wang, C. Y.; Zhao, W. Z. Robust Tube-MPC Trajectory Tracking Control for Four-Wheel Independent Steering Vehicles on Intermittent Snowy and Icy Roads. Chin. J. Mech. Eng. 2025, 38(1), 19. [Google Scholar] [CrossRef]
- Kumar, N.; Pachamuthu, R. Real-Time LPV-Based Non-Linear Model Predictive Control for Robust Trajectory Tracking in Autonomous Vehicles. Arxiv 2025. [Google Scholar] [CrossRef]
- Lucia, S.; Navarro, D.; Karg, B.; Sarnago, H.; Lucia, O. Deep Learning-Based Model Predictive Control for Resonant Power Converters. IEEE Trans. Ind. Inform. 2021, 17(1), 409–420. [Google Scholar] [CrossRef]
- Heshmati-alamdari, S.; Karras, G. C.; Marantos, P.; Kyriakopoulos, K. J. A Robust Model Predictive Control Approach for Autonomous Underwater Vehicles Operating in a Constrained workspace. IEEE ICRA 2018, 6183–6188. [Google Scholar] [CrossRef]
- Sun, K.; Zhang, N. N.; Li, Z. H.; Ding, H. T.; Zhang, H. S.; Jiang, C. H. Improved MPC for trajectory planning of self-driving cars. PLoS One 2025, 20(6), 33. [Google Scholar] [CrossRef]
- Hobbani, H.; Perez-Pena, F.; Schmidt, K. Modelling and Identification of a Tracked Mobile Robot: A Real-time Feasible Approach Using Particle Swarm Optimization and Information Criteria. Int. J. Control Autom. Syst. 2025, 23(9), 2687–2703. [Google Scholar] [CrossRef]
- Han, M.; He, H. W.; Shi, M.; Liu, W.; Cao, J. F.; Wu, J. D. Research on Learning-Based Model Predictive Path Tracking Control forAutonomous Vehicles. Automot. Eng. 2024, 46(07), 1197–1207. [Google Scholar] [CrossRef]
- Xiao, Y. Q.; Zhang, X. L.; Xu, X.; Liu, X. Q.; Liu, J. H. Deep Neural Networks With Koopman Operators for Modeling and Control of Autonomous Vehicles. IEEE T. Intell. Veh. 2023, 8(1), 135–146. [Google Scholar] [CrossRef]
- Yang, S.; Li, S. Z.; Zhao, Z. Y.; Huang, X. P.; Huang, Y. J. Integrated Autonomous Driving Lane Change Policy Based on TemporalDifference Learning Model Predictive Control. J. Mech. Eng. 2024, 60(10), 329–338. [Google Scholar] [CrossRef]
- Sadigh, D.; Sastry, S.; Seshia, S. A.; Dragan, A. D. Planning for autonomous cars that leverage effects on human actions. RSS 2016, 2, 1–9. [Google Scholar] [CrossRef]
- Fisac, J. F.; Bronstein, E.; Stefansson, E.; Sadigh, D.; Sastry, S. S.; Dragan, A. D. Hierarchical Game-Theoretic Planning for Autonomous Vehicles. IEEE ICRA 2019, 9590–9596. [Google Scholar] [CrossRef]
- Schwarting, W.; Pierson, A.; Alonso-Mora, J.; Karaman, S.; Rus, D. Social behavior for autonomous vehicles. Proc. Natl. Acad. Sci. U. S. A 2019, 116(50), 24972–24978. [Google Scholar] [CrossRef]
- Zhang, Q. Y.; Langari, R.; Tseng, H. E.; Mohan, S.; Szwabowski, S.; Filev, D. Stackelberg Differential Lane Change Game Based on MPC and Inverse MPC. IEEE Trans. Intell. Transp. Syst. 2024, 25(8), 8473–8485. [Google Scholar] [CrossRef]
- Zhang, C. J.; Wang, J.; Hu, S. Y. A Motion Planning Framework Based on Stackelberg Games for Autonomous Driving in Interactive Scenarios. In Advances in Dynamics of Vehicles on Roads and Tracks III; 2024; pp. 461–470. [Google Scholar] [CrossRef]
- Zanardi, A.; Zardini, G.; Srinivasan, S.; Bolognani, S.; Censi, A.; Dörfler, F.; Frazzoli, E. Posetal Games: Efficiency, Existence, and Refinement of Equilibria in Games With Prioritized Metrics. IEEE Robot. Autom. Lett. 2022, 7(2), 1292–1299. [Google Scholar] [CrossRef]
- Nan, J.; Deng, W.; Zheng, B. Intention Prediction and Mixed Strategy Nash Equilibrium-Based Decision-Making Framework for Autonomous Driving in Uncontrolled Intersection. IEEE Trans. Veh. Technol. 2022, 71(10), 10316–10326. [Google Scholar] [CrossRef]
- Kollarcik, A.; Hanzalek, Z. Parameter Adjustments in POMDP-Based Trajectory Planning for Unsignalized Intersections. 2024, 522–529. [Google Scholar] [CrossRef]
- Jin, X. J.; Zeng, C. D.; Zhu, S. F.; Liu, C. X.; Cai, P. P. BoT-Drive: Hierarchical Behavior and Trajectory Planning for Autonomous Driving using POMDPs. Arxiv 2024. [Google Scholar] [CrossRef]
- Brechtel, S.; Gindele, T.; Dillmann, R. Probabilistic decision-making under uncertainty for autonomous driving using continuous POMDPs. ITSC 2014, 392–399. [Google Scholar] [CrossRef]
- Snider, J. M. Automatic Steering Methods for Autonomous Automobile Path Tracking. CMU RI; 2009. [Google Scholar]
- Koenig, S.; Likhachev, M. Fast replanning for navigation in unknown terrain. IEEE Trans. Robot. 2005, 21(3), 354–363. [Google Scholar] [CrossRef]
- He, Z. C.; Dong, L.; Sun, C. Y.; Wang, J. W. Asynchronous Multithreading Reinforcement-Learning-Based Path Planning and Tracking for Unmanned Underwater Vehicle. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52(5), 2757–2769. [Google Scholar] [CrossRef]
- Levine, S.; Finn, C.; Darrell, T.; Abbeel, P. End-to-End Training of Deep Visuomotor Policies. J. Mach. Learn. Res. 2016, 17, 40. [Google Scholar]
- Ames, A. D.; Coogan, S.; Egerstedt, M.; Notomista, G.; Sreenath, K.; Tabuada, P. Control Barrier Functions: Theory and Applications. 18th ECC 2019, 3420–3431. [Google Scholar] [CrossRef]
- Patrinos, P.; Bemporad, A. An Accelerated Dual Gradient-Projection Algorithm for Embedded Linear Model Predictive Control. IEEE Trans. Autom. Control. 2014, 59(1), 18–33. [Google Scholar] [CrossRef]
- Wen, J.; Liang, X. F.; Wang, Y. W. Path tracking control of rice pollination robot based on DDPG+MPC J. Agric. Mech. Res. 2025, 47(06), 18–25. [Google Scholar] [CrossRef]
- Liu, Q. J.; Xiong, P. X.; Zhu, Q. Y.; Xiao, W.; Wang, K. J.; Hu, G. L.; Li, G. A DDPG-based Path Following Control Strategy for Autonomous Vehicles by Integrated Imitation Learning and Feedforward Exploration. Chin. J. Mech. Eng. 2025, 38(1), 174. [Google Scholar] [CrossRef]
- Lai, J. L.; Wu, Z. Z.; Ren, Z. G.; Tan, Q.; Xie, S. L. Trajectory planning of mobile robot: A Lyapunov-based reinforcement learning approach with implicit policy. Knowledge-Based Syst. 2025, 325, 15. [Google Scholar] [CrossRef]
- Yuan, K.; Huang, Y. J.; Yang, S.; Zhou, Z. W.; Wang, Y. L.; Cao, D. P.; Chen, H. Evolutionary Decision-Making and Planning for Autonomous Driving Based on Safe and Rational Exploration and Exploitation. Engineering 2024, 33, 108–120. [Google Scholar] [CrossRef]
- Zhang, R. X.; Wu, C. X.; Sun, T. C.; Zhao, Z. S. Progress on Deep Reinforcement Learning in Path Planning Comput. Eng. Appl. 2021, 57(19), 44–56. [Google Scholar] [CrossRef]
Figure 1.
Autonomous vehicle algorithm system architecture.
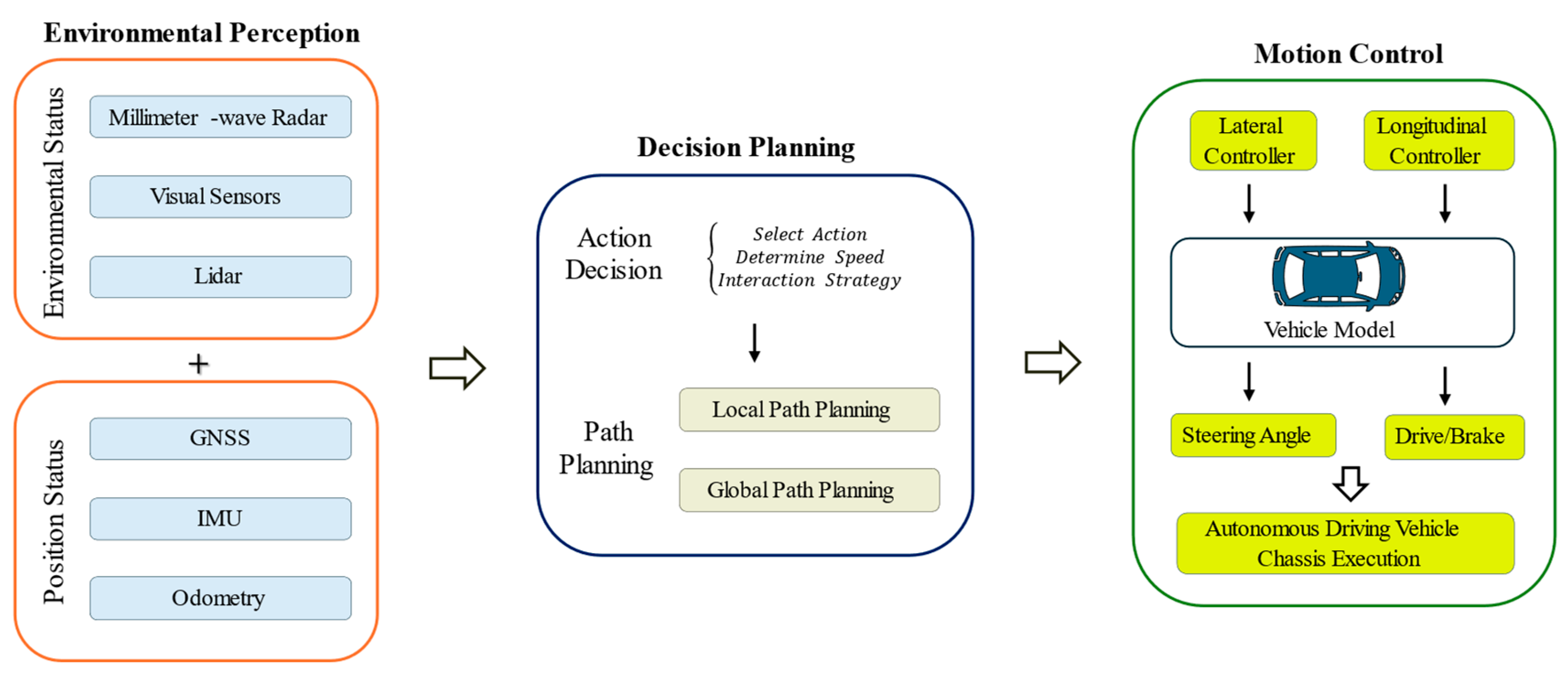
Figure 2.
Number of scientific publications and citations for autonomous vehicle path planning and trajectory tracking research from 2000 to 2025.
Figure 2.
Number of scientific publications and citations for autonomous vehicle path planning and trajectory tracking research from 2000 to 2025.
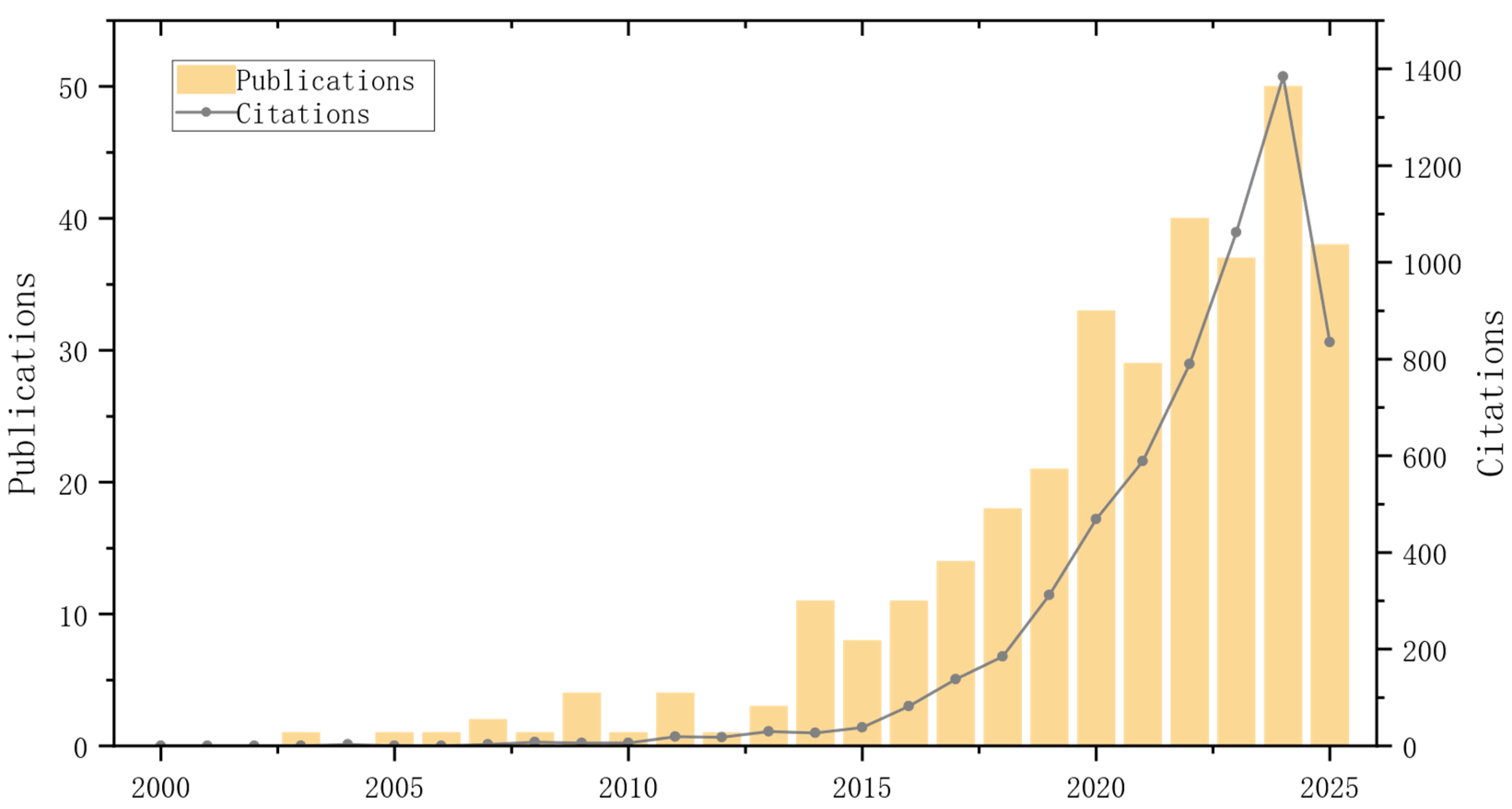
Figure 3.
Author collaboration network.
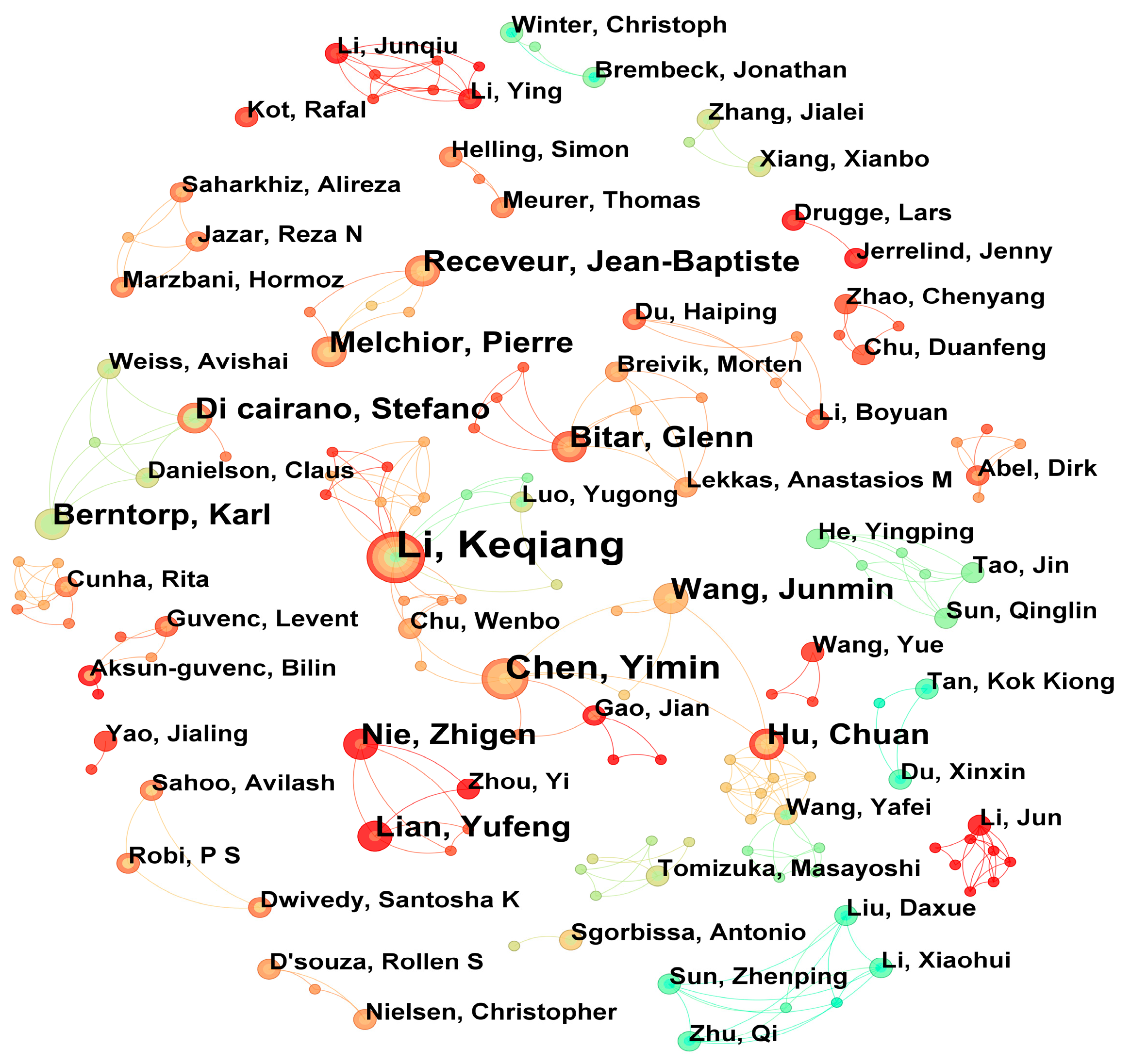
Figure 4.
Visualization of the issuing institutions (number of publications).
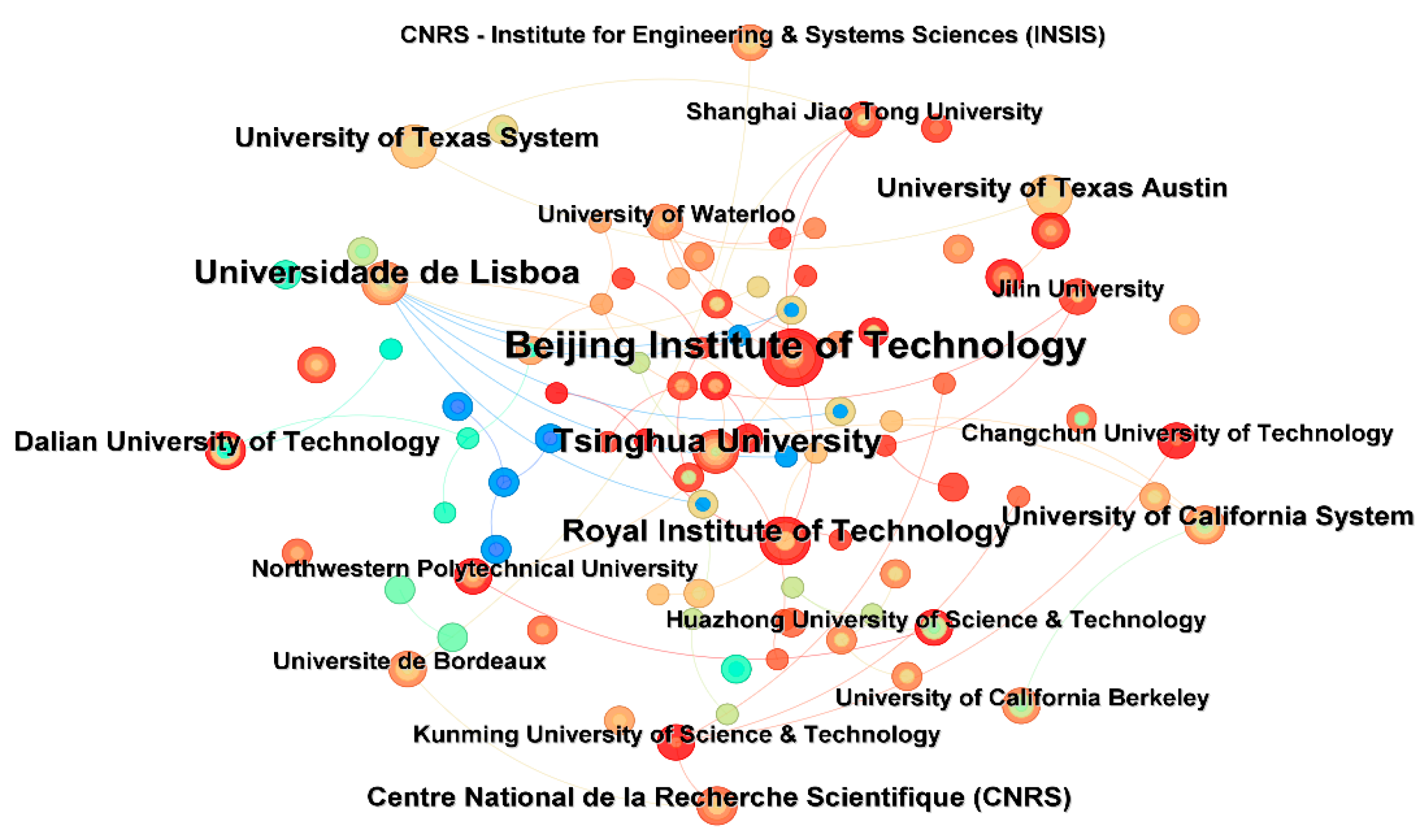
Figure 5.
Percentage of publications by country (countries with 2 or more publications).
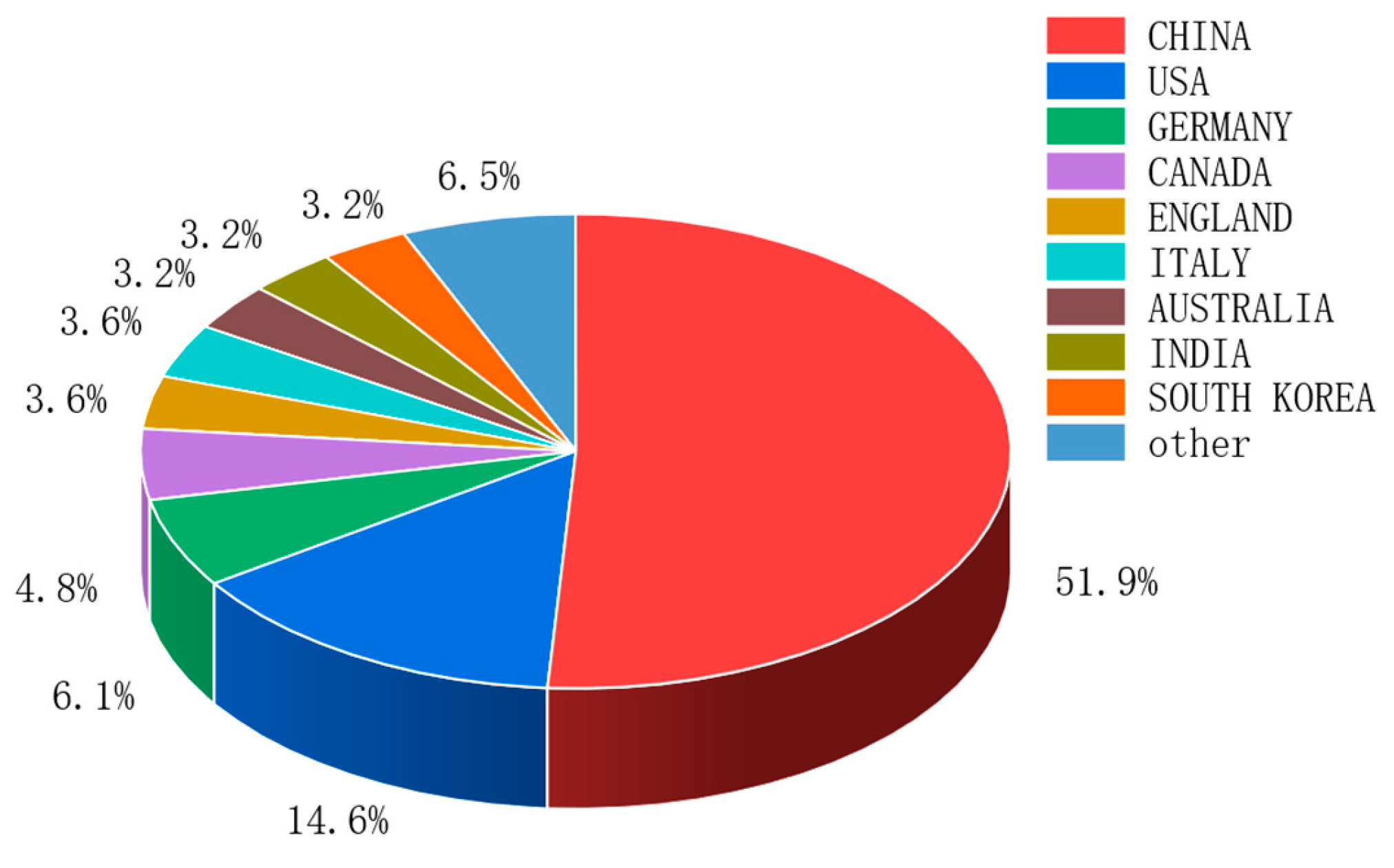
Figure 6.
International collaboration network.
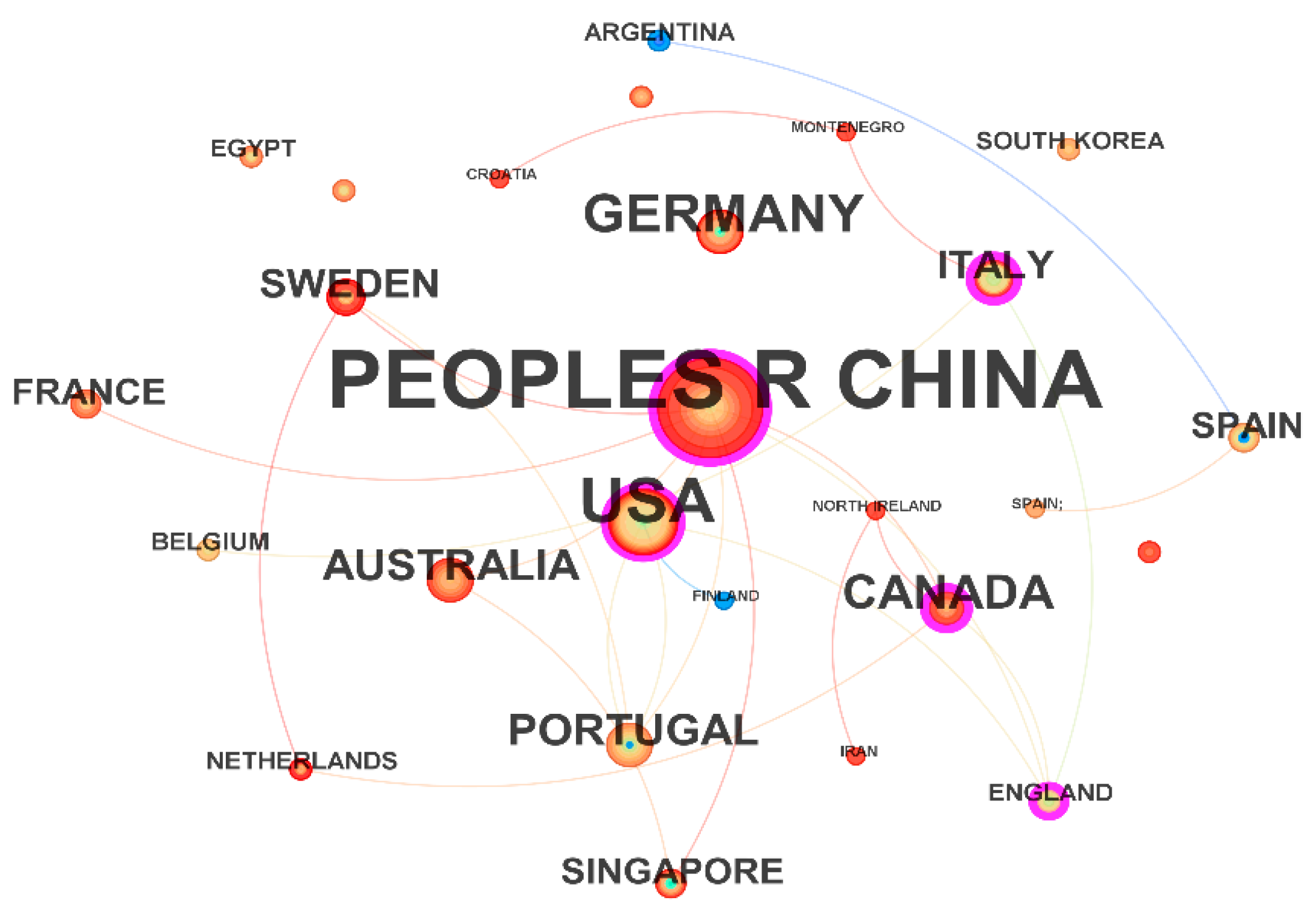
Figure 7.
Main research areas and their relationships for autonomous vehicle path planning and trajectory tracking.
Figure 7.
Main research areas and their relationships for autonomous vehicle path planning and trajectory tracking.
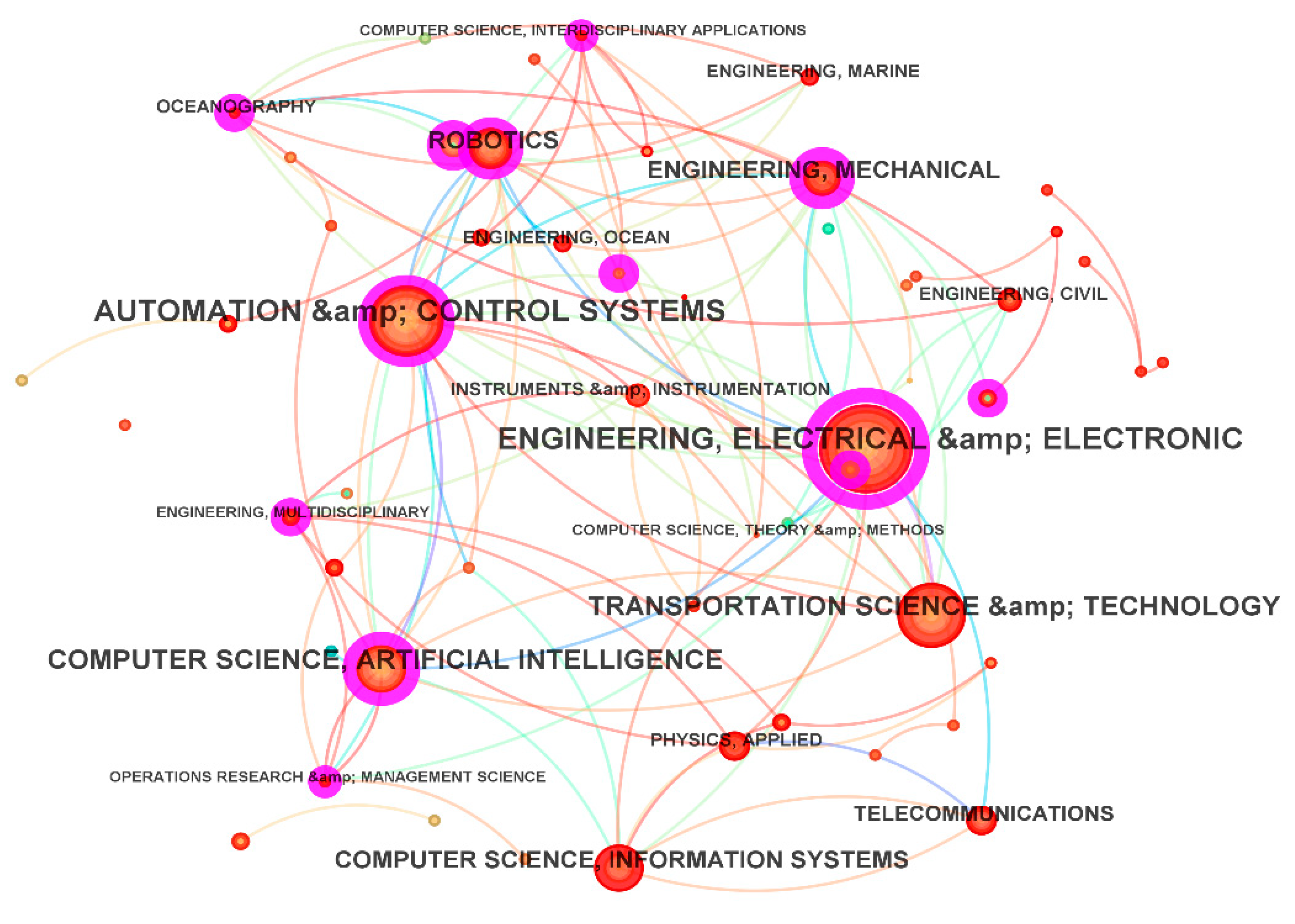
Figure 8.
Keyword co-occurrence graph.
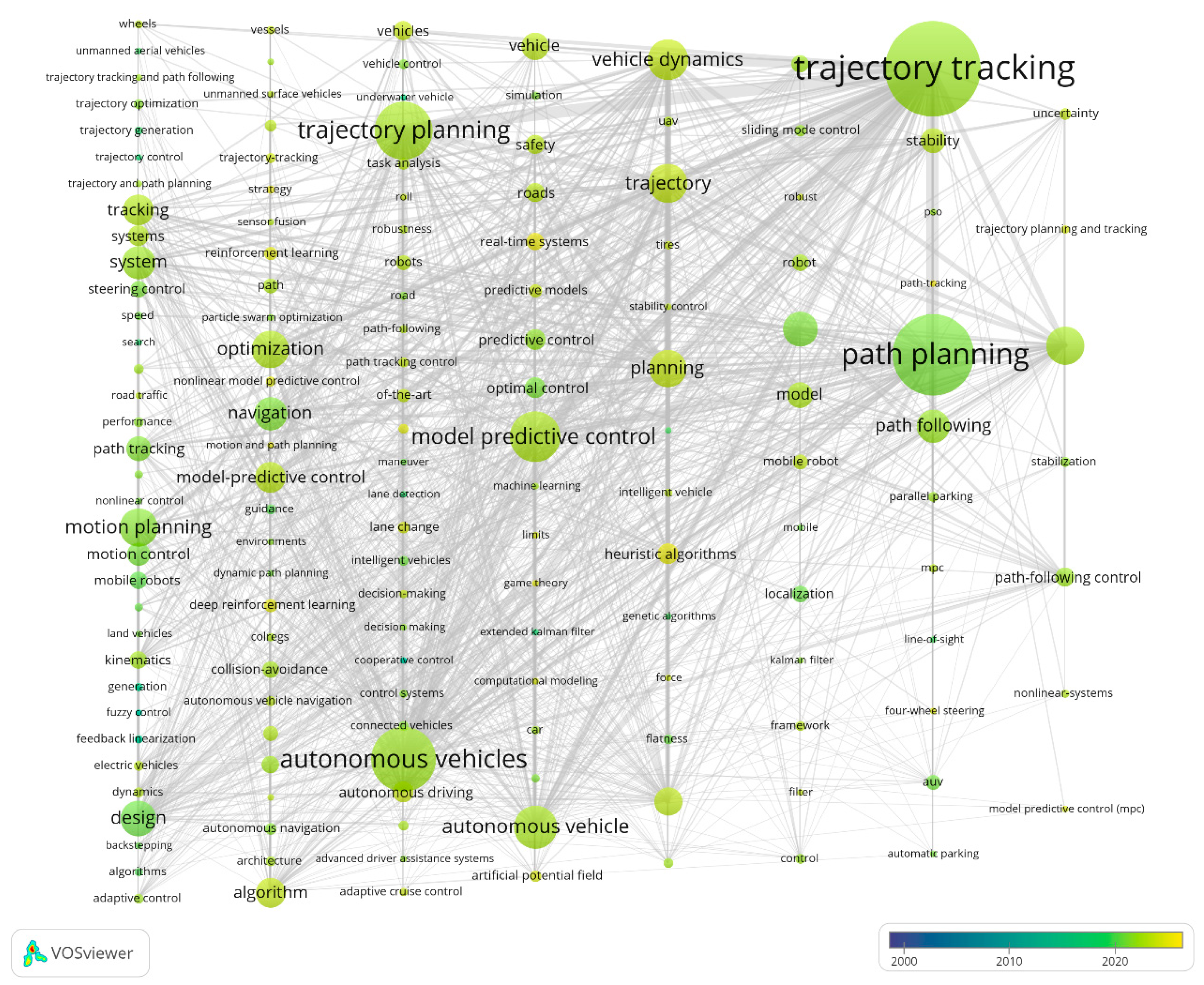
Figure 9.
Keyword co-occurrence density map.
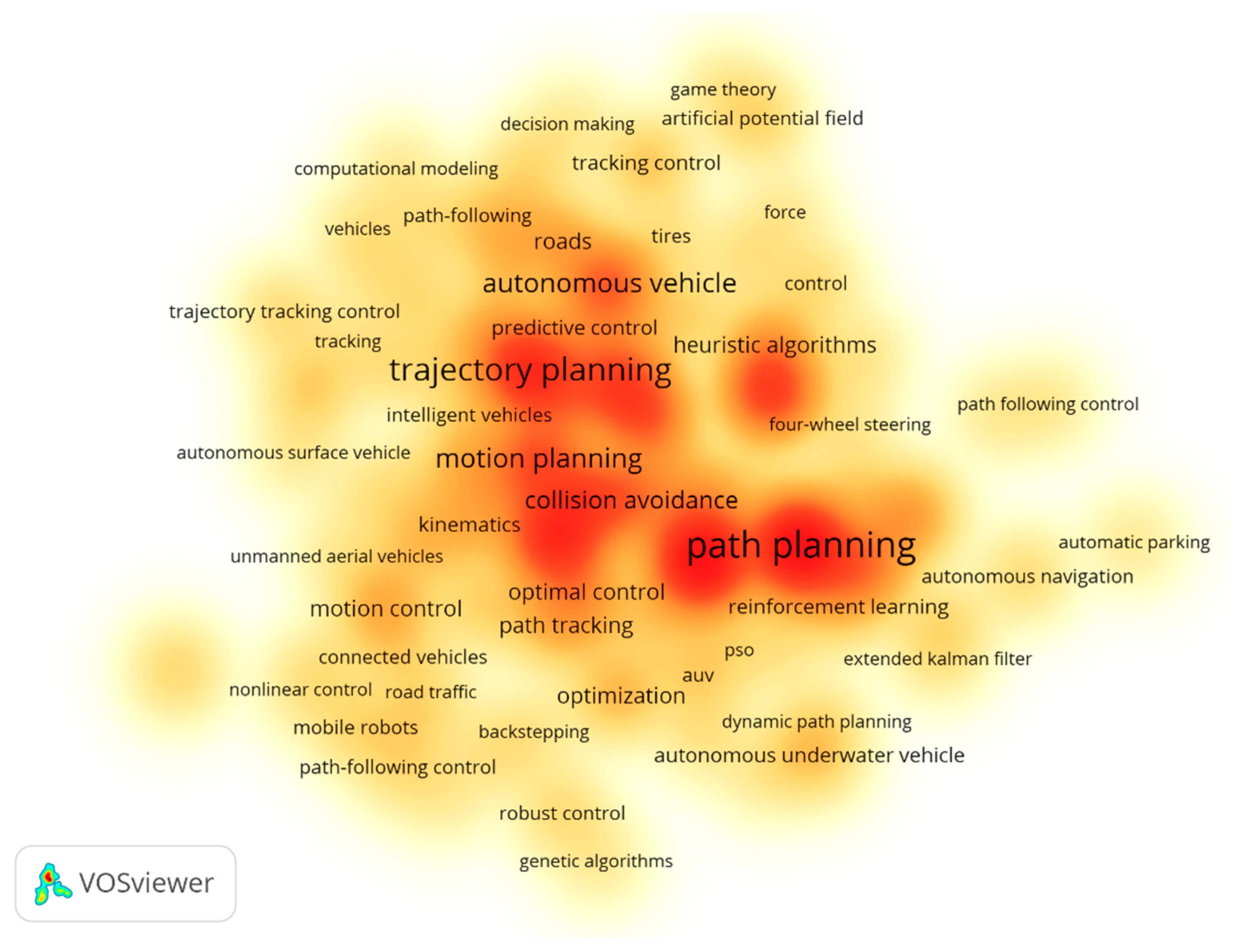
Figure 10.
Keyword emergence map.
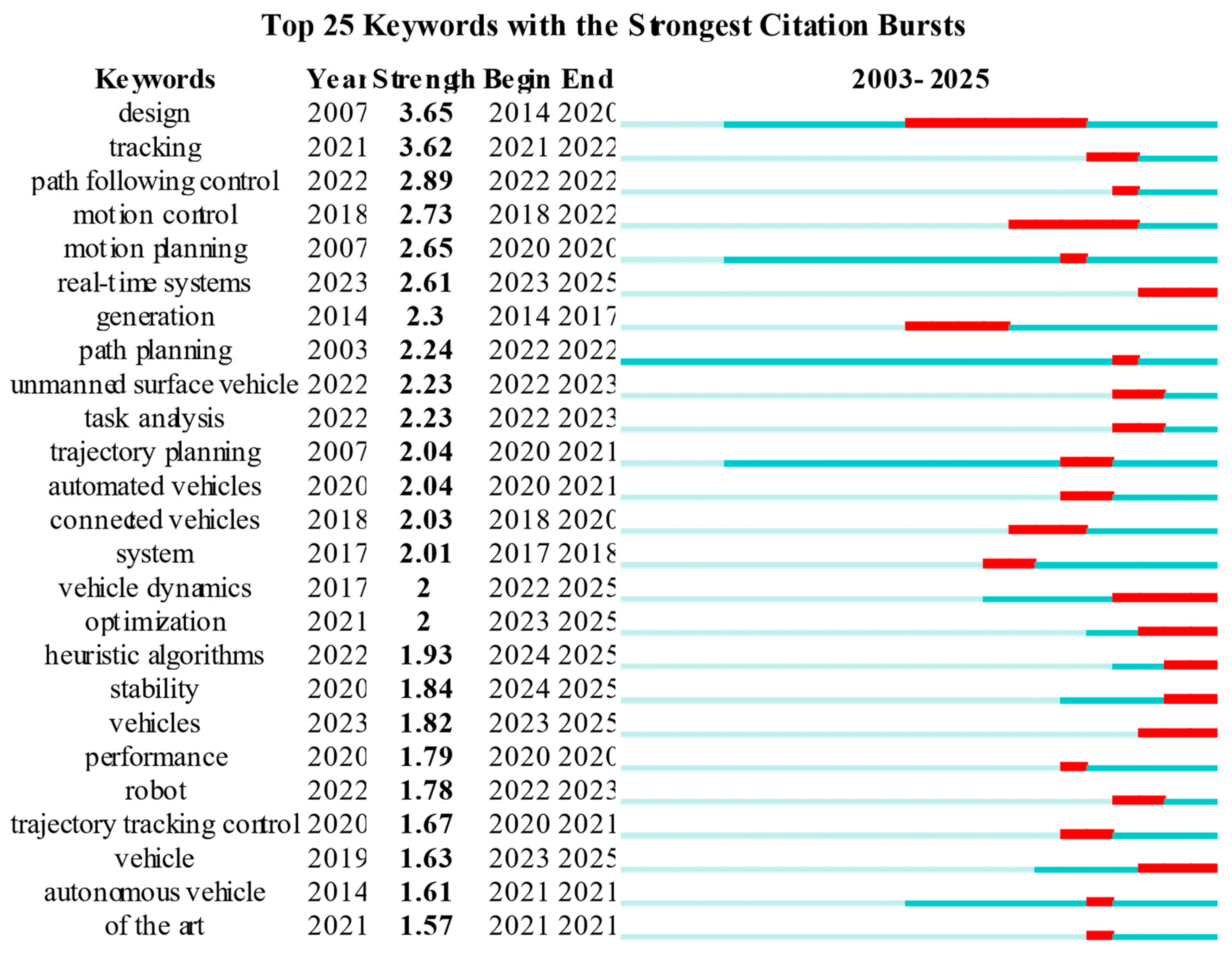
Figure 11.
Co-citation map of literature.
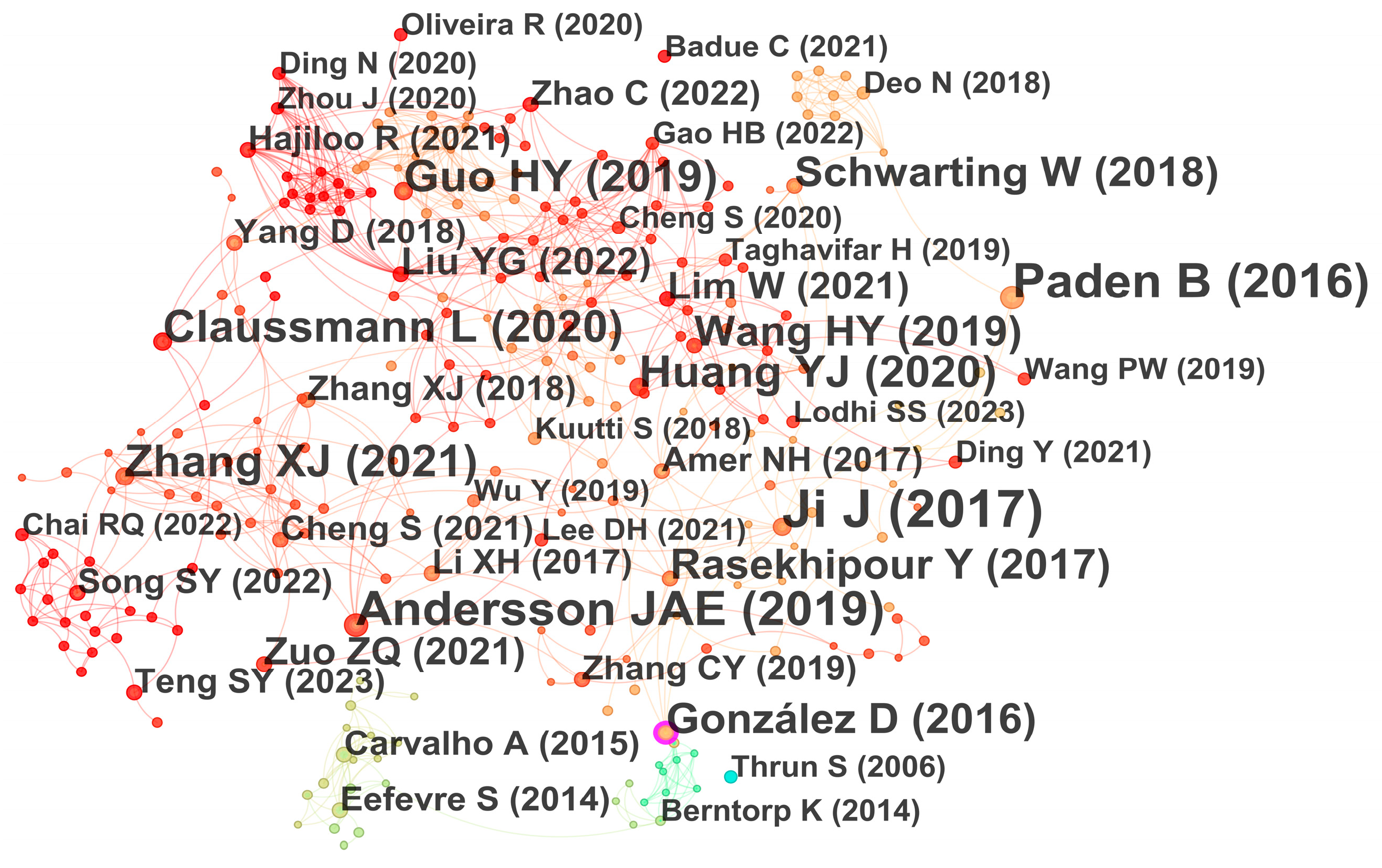

Table 1.
Subject Keywords.
| Search Keywords |
| "Autonomous" OR "Self-Driving" OR "Driverless" OR "Self-Piloting" |
| "Motion Planning" OR "Trajectory Planning" OR "Path Planning" |
| "Trajectory Tracking" OR "Path Following" |
| "Vehicle" OR "Car" OR "Automobile" OR "Motor Vehicle" OR "Motorcar" |
Table 2.
Data regarding authors with the highest number of publications.
| Author | Publications | Institution | Country |
| Li K.Q. | 5 | Tsinghua University | China |
| Chen Y.M. | 4 | Northwestern Polytech University | China |
| Melchior P. | 3 | Centre National de la Recherche Scientifique | France |
| Pascoal A. | 3 | University of Lisbon | Portugal |
| Nie Z.G. | 3 | Kunming University of Science & Technology | China |
| Di Cairano S. | 3 | Mitsubishi Electric Research Laboratories | USA |
| Yue M. | 3 | Dalian University of Technology | China |
| Lian Y.F. | 3 | Changchun University of Technology | China |
| Marzbani H. | 3 | RMIT University | Australia |
| Receveur J.-B. | 3 | University of Bordeaux | France |
Table 3.
Authors with the highest citation counts (top 10).
| Author | Publications | Citations | Country |
| Sahoo A., Dwivedy S. K., & Robi P. S.[46] | 2 | 454 | India |
| Li Keqiang | 5 | 388 | China |
| Shi Yang | 2 | 268 | Canada |
| Luo Yugong | 2 | 251 | China |
| Lie Guo | 2 | 210 | China |
| Shen Chao | 2 | 205 | Canada |
| Wang Junmin | 3 | 174 | USA |
| Luo Xiaoyuan | 2 | 129 | China |
| Chu Duanfeng | 2 | 120 | China |
| Zhao Chenyang | 2 | 102 | China |
Table 4.
Institutions with the highest citation counts (top 10).
| Institution | Publications | Citations | Country |
| Tsinghua university | 10 | 545 | China |
| Norwegian university of science technology | 6 | 538 | Norway |
| Beijing Institute of technology | 17 | 504 | China |
| National Institute of technology system | 3 | 490 | India |
| Indian institute of technology system | 7 | 484 | India |
| Wuhan university of technology | 3 | 347 | China |
| Chinese academy of sciences | 3 | 275 | China |
| Virginia polytechnic institute state university | 3 | 241 | USA |
| University of Texas Austin | 4 | 223 | USA |
| Dalian University of technology | 5 | 221 | China |
Table 5.
Ranking of the top 10 publishing institutions in both publication volume and citation count.
Table 5.
Ranking of the top 10 publishing institutions in both publication volume and citation count.
| Publishing institutions | Publications | Citations |
| IEEE | 159 | 3129 |
| Elsevier | 52 | 1768 |
| MDPI | 39 | 185 |
| Sage | 21 | 268 |
| Springer Nature | 13 | 289 |
| Wiley | 8 | 132 |
| Taylor & Francis | 6 | 40 |
| Amer Soc Mechanical Engineers | 4 | 2 |
| Hindawi Publishing Group | 3 | 17 |
| Inderscience Enterprises Ltd | 3 | 5 |
Table 6.
Analysis of the top 10 research fields by both frequency and betweenness centrality.
| Research field | Publications | Centrality |
| Engineering, Electrical & Electronic | 201 | 0.49 |
| Automation Control Systems | 106 | 0.12 |
| Computer Science | 103 | 0.26 |
| Transportation Science | 64 | 0.09 |
| Robotics | 50 | 0.15 |
| Telecommunications | 26 | 0 |
| Instruments Instrumentation | 19 | 0.01 |
| Oceanography | 17 | 0.38 |
| Physics | 15 | 0.07 |
| Operations Research Management Science | 12 | 0.11 |
Table 7.
Top 10 papers ranked by citation count.
| Paper | Year | Times Cited |
| An advancements in the field of autonomous underwater vehicle[46] |
2019 | 453 |
| Line-of-sight path following for Dubins paths with adaptive sideslip compensation of drift forces[65] |
2014 | 453 |
| Research advances and challenges of autonomous and connected ground vehicles[66] |
2019 | 239 |
| A dynamic automated lane change maneuver based on vehicle-to-vehicle communication[62] |
2015 | 225 |
| Integrated path planning and tracking control of an AUV: a unified receding horizon optimization approach[67] |
2014 | 204 |
| Trajectory planning and tracking control for autonomous lane change maneuver based on the cooperative vehicle infrastructure system[68] |
2015 | 196 |
| Trajectory planning and tracking for autonomous overtaking: State-of-the-art and future prospects[59] |
2018 | 176 |
| A fuzzy-logic-based approach for mobile robot path tracking[69] |
2016 | 164 |
| Deep learning-based trajectory planning and control for autonomous ground vehicle parking maneuver[70] |
2022 | 158 |
| Mpc-based cooperative control strategy of path planning and trajectory tracking for intelligent vehicles[71] | 2020 | 127 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



