Submitted:
25 December 2025
Posted:
26 December 2025
You are already at the latest version
Abstract
This extensive review provides a thorough examination of first-order ordinary differential equations (ODEs), covering fundamental theoretical concepts, diverse analytical solution techniques, stability analysis methods, numerical approximation algorithms, and interdisciplinary applications. The paper systematically explores classical models including exponential growth, logistic dynamics, and cooling laws, while extending to advanced topics such as bifurcation analysis, stochastic exten- sions, and modern computational approaches. Special attention is given to the in- terplay between analytical and numerical methods, with practical examples drawn from ecology, physics, engineering, and biomedical sciences. The work serves as both an educational resource for students and a reference for researchers and prac- titioners working with dynamical systems across scientific domains.
Keywords:
ordinary differential equations
; dynamical systems
; stability analysis
; numerical methods
; bifurcation theory
; mathematical modeling
; phase plane analysis
; computational mathematics
1. Introduction and Historical Context
1.1. Historical Development
The study of differential equations originated in the 17th century with the work of Isaac Newton and Gottfried Leibniz, who developed calculus as a language for describing continuous change. Early applications focused on physical problems: planetary motion, optics, and mechanics. The 18th century saw systematic development by Euler, Bernoulli, and Lagrange, establishing many fundamental solution methods still in use today.
1.2. Mathematical Formulation
A first-order ordinary differential equation expresses a relationship between an unknown function , its derivative , and the independent variable t:
The general solution typically contains one arbitrary constant, determined by an initial condition:
Theorem 1
(Picard–Lindelöf Existence and Uniqueness). Consider the initial value problem (1.1)-(1.2). If is continuous in a rectangle and satisfies a Lipschitz condition in y:
then there exists a unique solution on some interval , where with .
1.3. Classification of First-Order ODEs
First-order ODEs can be categorized based on their structure:

Table 1.
Classification of first-order ODEs.
| Type | General Form | Characteristics |
|---|---|---|
| Separable | Variables can be separated | |
| Linear | Linear in y and | |
| Exact | ||
| Bernoulli | Nonlinear but reducible to linear | |
| Homogeneous | Invariant under scaling |
1.4. Modern Significance
In contemporary science and engineering, first-order ODEs model:
- Population dynamics in ecology
- Chemical kinetics and reaction rates
- Electrical circuits (RC, RL)
- Pharmacokinetics and drug metabolism
- Economic growth models
- Heat transfer and diffusion processes
- Machine learning (gradient descent dynamics)
2. Analytical Solution Methods: Comprehensive Treatment
2.1. Separation of Variables with Advanced Examples
The separation of variables technique applies when the function factors as :
Example 2.1: Solve with .
Solution: Separating variables:
Using partial fractions:
Integrating:
Simplifying:
With , . Final solution:
2.2. Linear Equations: Theory and Applications
The general linear first-order ODE has the form:
The integrating factor method provides a systematic solution:
Multiplying (2.2) by gives:
Integrating:
Example 2.2: RL circuit equation: , where .
Solution: Rewrite as . Integrating factor:
Solution:
Evaluating the integral:
Thus:
2.3. Exact Equations and Integrating Factors
The differential form is exact if:
If exact, there exists such that:
Example 2.3: Solve .
Solution: Check exactness:
Equal, so exact. Find :
Thus .
2.4. Bernoulli Equations and Transformations
The Bernoulli equation:
Substituting gives a linear equation:
2.5. Riccati Equations
The Riccati equation:
If a particular solution is known, the substitution transforms it to linear.
3. Qualitative Analysis and Stability Theory
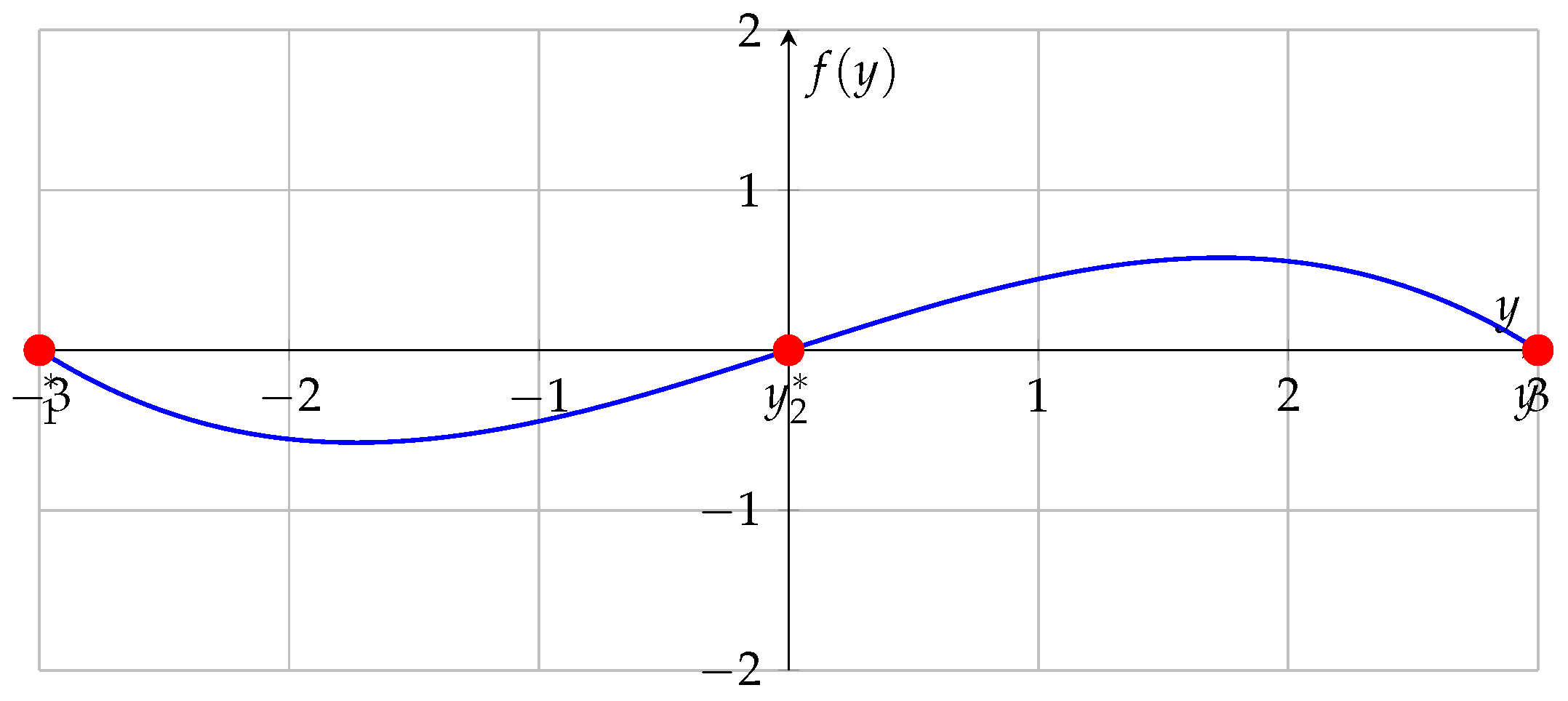
3.1. Autonomous Equations and Phase Line Analysis
For autonomous equations , equilibrium points satisfy .
Figure 1.
Graph of showing equilibrium points
3.2. Linear Stability Analysis
For small perturbations around equilibrium:
Solution: .
Stability classification:
- : asymptotically stable
- : unstable
- : linearization inconclusive
3.3. Lyapunov Functions for Nonlinear Stability
For systems where linear analysis fails, Lyapunov’s direct method provides stability criteria.
Definition 1.
A function is a Lyapunov function for equilibrium if:
- (1)
- and for
- (2)
- near
Example 3.1: Analyze stability of .
Solution: Equilibrium: . Linearization: (inconclusive). Choose . Then:
Thus is asymptotically stable.
3.4. Bifurcation Analysis
Bifurcations occur when system behavior changes qualitatively with parameter variation.
Example 3.2: Transcritical bifurcation in .
Equilibria: and . Stability:
- For : stable, unstable
- For : unstable, stable
- At : bifurcation point
4. Canonical Models: Detailed Analysis
4.1. Exponential Growth and Decay
The fundamental model has solution .
Applications:
- Population growth ()
- Radioactive decay ()
- Compound interest (k as interest rate)
Table 2.
Half-life and doubling time calculations.
| Process | Formula | Example |
|---|---|---|
| Half-life | Carbon-14: years | |
| Doubling time | Bacteria: minutes |
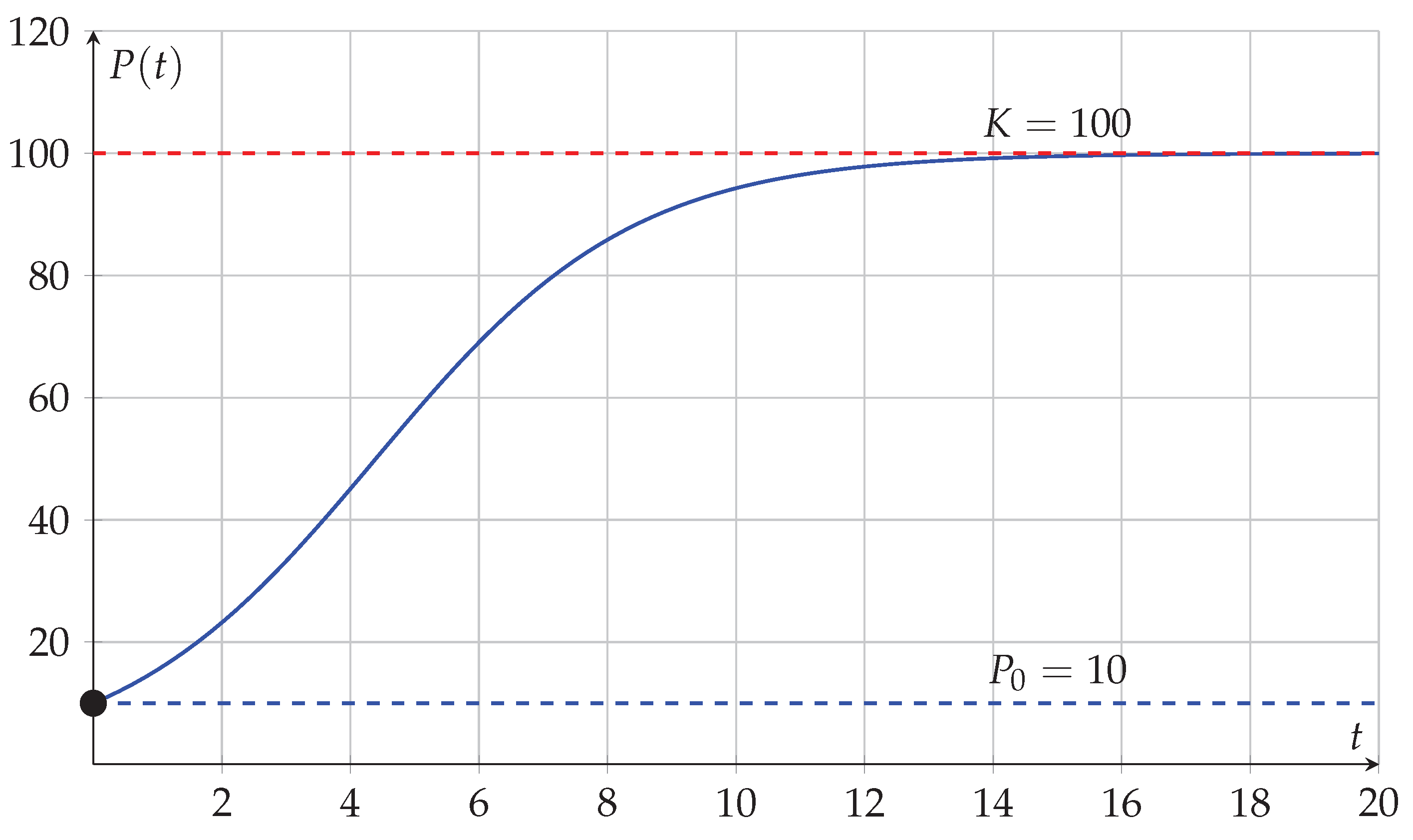
4.2. Logistic Growth: Complete Analysis
The logistic equation:
Analytical solution via separation:
Figure 2.
Logistic growth with , ,
4.3. Newton’s Law of Cooling: Extended Models
General form: . Solution:
Example 4.1: Forensic application. A body found at 2 AM with temperature 27°C. Room temperature 21°C. At 3 AM, temperature is 26°C. Time of death?
Solution: Using two measurements:
Dividing: . Assuming body temperature at death = 37°C:
Death occurred approximately 5.3 hours before 2 AM, around 8:42 PM.
4.4. Gompertz Growth Model
Used for tumor growth modeling:
Solution: .
5. Numerical Methods: Algorithms and Implementation
5.1. Euler’s Method: Error Analysis
Forward Euler method:
Local truncation error: . Global error: , where .
5.2. Runge-Kutta Methods Family
5.2.1. Second-Order Methods (RK2)
- Modified Euler:
- Heun’s method:
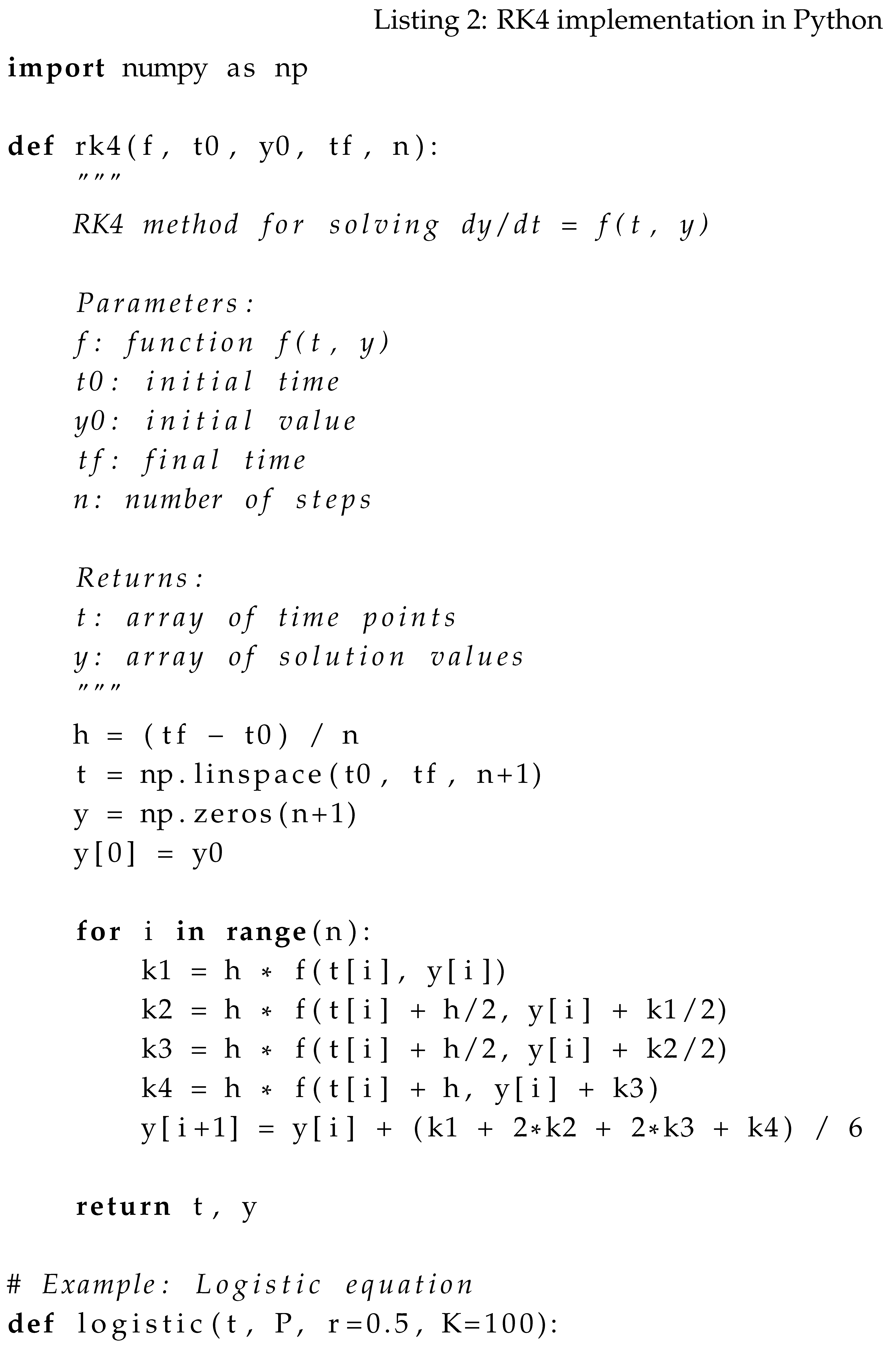
5.2.2. Classical Fourth-Order Runge-Kutta (RK4)
Local error: , global error: .
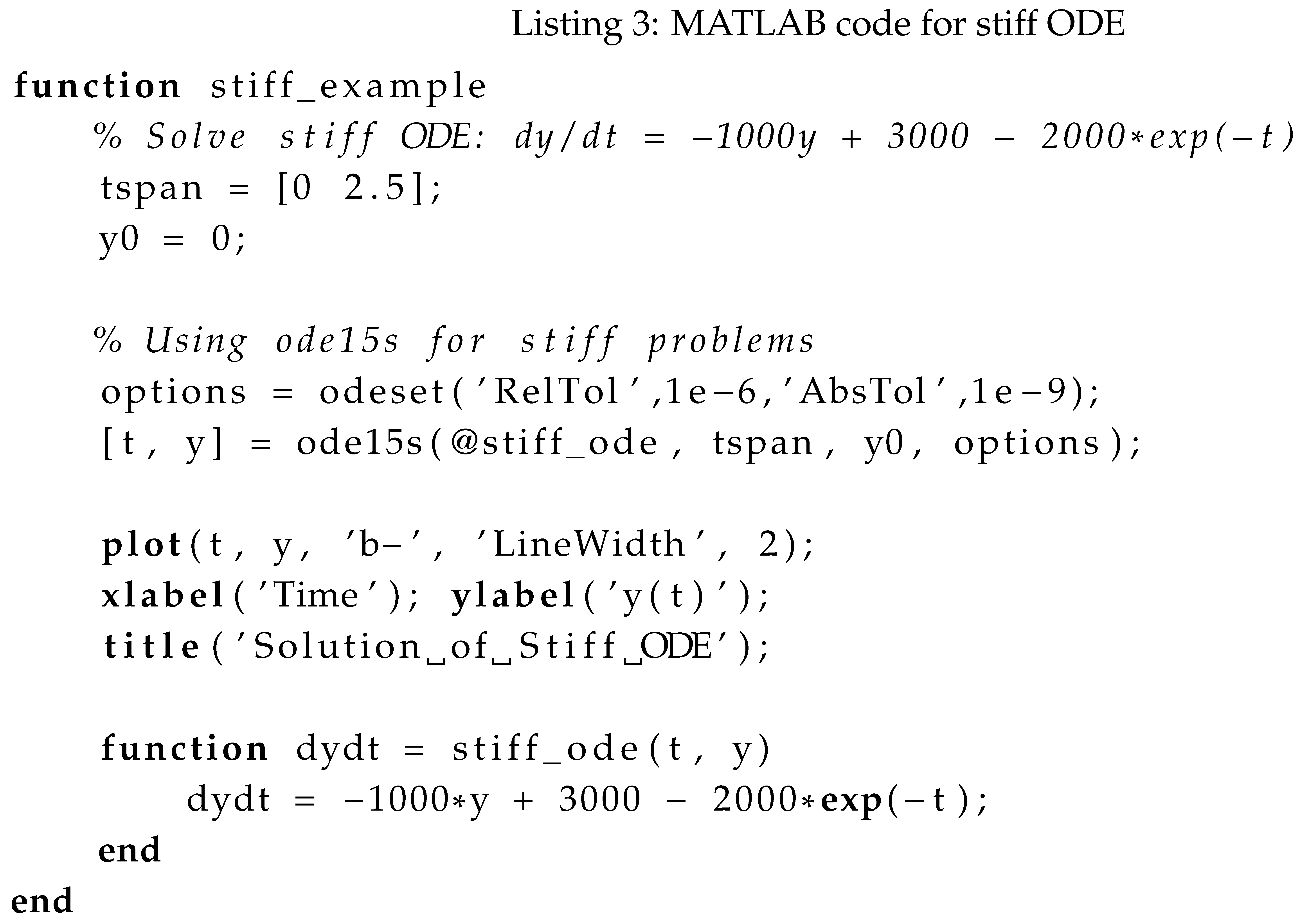
5.3. Stiff Equations and Implicit Methods
For stiff equations like , explicit methods require very small h.
5.3.1. Backward Euler Method
Unconditionally stable but requires solving nonlinear equation.
5.3.2. Trapezoidal Rule (Crank-Nicolson)
Second-order accurate, A-stable.
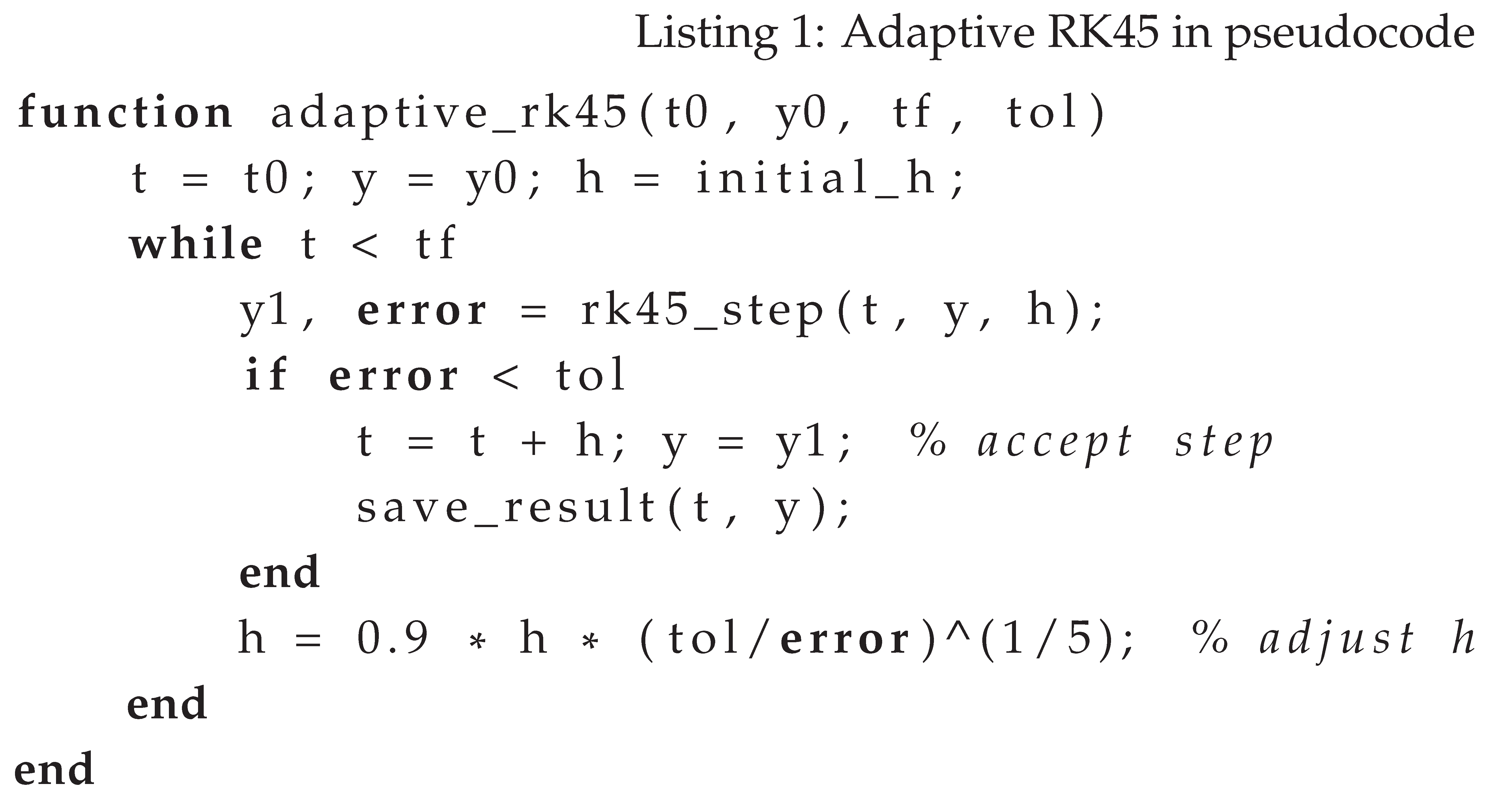
5.4. Adaptive Step Size Control
Step size adjustment based on error estimation:
6. Advanced Topics and Extensions
6.1. Allee Effect Models
Strong Allee effect:
Three equilibria: (stable), (unstable threshold), (stable).
6.2. Delay Differential Equations (DDEs)
Include historical dependence: .
Example: Hutchinson’s delayed logistic equation:
Can exhibit oscillatory behavior and stability switches.
6.3. Stochastic Differential Equations (SDEs)
Add random fluctuations: .
Example: Stochastic logistic growth:
6.4. Fractional Differential Equations
Generalize to fractional order: , .
7. Applications Across Disciplines
7.1. Ecology and Population Dynamics
- Lotka-Volterra predator-prey models
- Metapopulation dynamics
- Species invasion models
- Harvesting and management strategies
7.2. Biomedical Sciences
7.2.1. Pharmacokinetics: One-Compartment Model
where C = concentration, = clearance, V = volume, = infusion rate.
7.2.2. Epidemiology: SI Model
Basic reproduction number: .
7.3. Physics and Engineering
7.3.1. Electrical Circuits
RC circuit: . RL circuit: .
7.3.2. Mechanics with Drag
Linear drag (): . Quadratic drag: analytical solution involves hyperbolic functions.
7.4. Economics and Finance
7.4.1. Solow Growth Model
where k = capital per worker, s = savings rate, n = population growth, = depreciation.
8. Computational Implementation Examples
8.1. Python Implementation of RK4

8.2. MATLAB Implementation for Stiff Problems
9. Conclusions and Future Directions
First-order ODEs continue to be indispensable in scientific modeling. Future directions include:
- Machine Learning Integration: Neural ODEs that parameterize with neural networks
- High-Dimensional Systems: Applications in data science and network dynamics
- Stochastic Methods: Improved numerical methods for SDEs
- Hybrid Systems: Combining continuous ODEs with discrete events
- Uncertainty Quantification: Propagating parameter uncertainties through ODE models
The interplay between analytical insight and computational power continues to drive innovation in both theoretical understanding and practical applications of first-order differential equations.
Appendix A. Useful Integrals and Transformations
Appendix A.1. Common Integrals
Appendix A.2. Integration by Parts Formula
Appendix B. Stability Criteria Summary
Table A1.
Stability conditions for common equilibrium types.
| Equilibrium Type | Condition | Stability |
|---|---|---|
| Node | , real | Asymptotically stable |
| Source | , real | Unstable |
| Saddle | , | Semistable |
| Degenerate | Higher-order analysis |
Appendix C. Appendix C: Numerical Methods Error Comparison
Table A2.
Comparison of numerical methods for ODEs.
| Method | Order | Stability | Computational Cost |
|---|---|---|---|
| Forward Euler | 1 | Conditional | Low |
| Backward Euler | 1 | Unconditional | Medium (implicit) |
| Trapezoidal Rule | 2 | Unconditional | Medium (implicit) |
| Heun’s Method | 2 | Conditional | Medium |
| Classical RK4 | 4 | Conditional | High |
| Adams-Bashforth | Variable | Conditional | Medium |
References
- Brauer, F.; Castillo-Chavez, C. Mathematical Models in Population Biology and Epidemiology; Springer Science & Business Media, 2012. [Google Scholar]
- Hirsch, M. W.; Smale, S.; Devaney, R. L. Differential Equations, Dynamical Systems, and an Introduction to Chaos; Academic Press, 2012. [Google Scholar]
- Strogatz, S. H. Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering; CRC Press, 2018. [Google Scholar]
- Trench, W. F. Elementary Differential Equations with Boundary Value Problems; Trinity University, 2013. [Google Scholar]
- Boyce, W. E.; DiPrima, R. C.; Meade, D. B. Elementary Differential Equations and Boundary Value Problems; John Wiley & Sons, 2012. [Google Scholar]
- Butcher, J. C. Numerical Methods for Ordinary Differential Equations; John Wiley & Sons, 2016. [Google Scholar]
- Ascher, U. M.; Petzold, L. R. Computer Methods for Ordinary Differential Equations and Differential-Algebraic Equations; SIAM, 1998. [Google Scholar]
- Edelstein-Keshet, L. Mathematical Models in Biology; SIAM, 2005. [Google Scholar]
- Murray, J. D. Mathematical Biology: I. An Introduction; Springer, 2002. [Google Scholar]
- Kloeden, P. E.; Platen, E. Numerical Solution of Stochastic Differential Equations; Springer, 2011. [Google Scholar]
- Hale, J. K.; Kocak, H. Dynamics and Bifurcations; Springer Science & Business Media, 2012. [Google Scholar]
- Chen, W.; Holm, S. Fractional Derivative Modeling in Mechanics and Engineering; Springer, 2014. [Google Scholar]
- Shampine, L. F. Numerical Solution of Ordinary Differential Equations; Chapman and Hall, 1997. [Google Scholar]
- Keshava, R. Ordinary Differential Equations: Principles and Applications; Tata McGraw-Hill, 1967. [Google Scholar]
- Arnold, V. I. Ordinary Differential Equations; Springer, 1992. [Google Scholar]
- Coddington, E. A.; Levinson, N. Theory of Ordinary Differential Equations; McGraw-Hill, 1955. [Google Scholar]
- Hartman, P. Ordinary Differential Equations; SIAM, 2002. [Google Scholar]
- Hale, J. K. Ordinary Differential Equations; Krieger Publishing Company, 1980. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



