
Submitted:
15 December 2025
Posted:
16 December 2025
You are already at the latest version
Abstract
This study presents a passive mechanical filter designed to enhance sub-Hertz Venusquake detection by shaping the seismic transfer path with a tunable, high-Q pendulum mounted inside a cylindrical enclosure on a three-ring gimbal. The gimbal provides self-leveling on uneven terrain, while the housing–gimbal assembly remains broadband-stiff (<1–1000 Hz), limiting platform-induced motion and preventing spurious high-frequency amplification. Unlike approaches that rely on broadband digitization followed by digital filtering, which require large dynamic range, high bandwidth, and thermally stable electronics yet not feasible on Venus, the proposed mechanism performs pre-filtering at the mechanical level that can be energy-saving, reducing the required analog-to-digital conversion (ADC) range while amplifying the target band. Response spectrum analysis shows a clear low-pass behavior with peak sensitivity in the 0.5–0.8 Hz range. When tuned to 50-55 mm pendulum length and assumed undamping, the pendulum-mount mechanism improves detectability at best by 10-100 relative to a bare sensor for moderate magnitude (Ms = 3-6) in a 12-h observation window, with signal-to-noise (SNR) ratio of 3, and amplitude spectrum density (ASD) of 10⁻⁸ m/s²/√Hz. Furthermore, we extrapolate that the predicted minimum detectable event rates follow Nmmin∝(SNR)1.2(ASD)1.2fs0.6, where fs is the quake wave frequency. A limitation is the quasi-static regime (0.05 Hz or below), where rigid-body motion overrides the benefit. Overall, the passive, power-free architecture offers a robust alternative to existing Venus Lander designs, enabling sub-Hz detection even during short-duration surface operations while adhering to mission constraints.
Keywords:
seismometer
; Venusquake detection
; seismic path transfer function
; transmissibility
; sub-hertz frequency
; long period
; pendulum
1. Introduction
Venus holds a key to understanding the divergent evolutionary paths of rocky planets in our Solar system. Despite growing evidence of ongoing volcanic activity on the Venus’s surface [1], the lack of direct seismic observations still limits our knowledge of Venus’s internal structure. While the occurrence of surface quakes on Venus was theoretically estimated as frequent as a few millihertz (mHz) based on the atmospheric-solid body coupling model [2], it could fall within the range of 0.01–0.1 Hz based on ground sensing [3]. In either scenario, it requires long temporal baselines for a ground-deployed seismometer capable of detecting events that occur 100 s or more apart. Achieving this goal necessitates long-duration operations.
While the balloon-borne infrasound sensors and orbital airglow imaging (still in evaluation) offer valuable alternative pathways to seismic detection, the seismic-to-atmospheric coupling inherently limits their detection of seismic waves below 1 Hz [4]. They also require calibration to reliably differentiate seismic signals from environmental and electronic noise [5].
Ground-deployed sensors, although technically challenged by the planet’s harsh surface conditions, remain the most direct and informative in preserving waveform fidelity, providing full frequency bandwidth, and capturing low-magnitude events [6]. This can be evident by Mars InSight’s seismic experiment (SEIS), which detected over 1,300 marsquakes in the sub-Hertz and 1-3 Hz ranges [7]. It suggests that, when properly coupled to the ground and shielded from wind, the ground-deployed seismometers can effectively monitor quakes [8]. The extreme surface environment on Venus, however, will limit the operational lifetime of ground-deployed seismometers. Historically, the longest a seismometer has survived on Venus was approximately 127 minutes, achieved by the Groza-2 seismometer aboard the Soviet Venera-13 lander [9]. Despite its longer duration, Venera-13’s seismometer did not detect any microseismic activity. Venera-14, with a shorter lifespan of just 57 minutes, recorded two potential microseismic events after ruling out the system and wind noises [9].
Seismometer designs for long durations on the Venus surface have been explored in concepts in LLISSE [10] and SAEVe [3]. In specific, SAEVe’s mission planning emphasizes balancing limited operational time with reliable seismic detection. It employs a ground-deployed MEMS 3-axis sensor, as opposed to the uniaxial ‘Groza 2’ instruments on Venera-13 and -14 landers. In SAEVe’s concept, the sensor’s vertical axis remains continuously powered for “listening,” consuming up to 66% of the energy budget, while full 3-axis sensing is triggered only by significant seismic events. The trigger threshold for such active detection is still in deliberation, to avoid both excessive and insufficient detections for conserving power without missing critical events. However, continuous listening is vulnerable to ambient and system noise, leading to wasteful energy expenditure.
A second challenge involves the degradation of waveform fidelity due to ground coupling, defined as the interaction between the seismic motion and the propagation path from the source to the instrument [11]. As seismic waves travel through this path which includes the soil, housing, and frequently the lander structure, they are distorted by these coupling interfaces, as illustrated in Figure 1 and detailed in the Supplementary Materials, and as complemented by the literature discussed next that such coupling is widely recognized as non-robust and difficult to control.
Ground coupling can be modelled as a convolution integral in the time domain [12] or as a transfer function between ground motion (input) and the seismic signal (output) [13,14]. Any structural resonances within the seismometer’s passband will amplify this distorted signal, potentially leading to false triggers. Factors such as material deformability, surface roughness, and the lander’s deployment orientation further influence ground coupling. A stiffer seismic path, characterized by broader spectral bandwidth and resonances outside the seismometer’s bandpass, better preserves the integrity of the seismic signal. Ensuring that seismometers are “reasonably well coupled to the ground” is thus crucial for reliable seismic detection [6]. On-deck seismometers tend to exhibit a broad, complex spectral response due to heterogeneous lander structures [14], whereas directly ground-deployed sensors have simpler transfer characteristics but are still influenced by soil properties, material compliance, surface roughness, and deployment orientation. Wind loading and lander vibrations can inject low-frequency mechanical noise, masking the weak sub-Hz seismic signals of interest. Even small deviations in transfer function have been shown to cause measurable detection errors [15].
Design robustness to modeling errors and disturbances imposes another concern for lander-deployed seismometers. The coupled lander–ground–instrument dynamics strongly shape the instrument transfer function and achievable spectral sensitivity [11]. Small deviations in a seismometer’s transfer function have been shown to introduce measurable errors [15]. Moreover, models and field tests showed that wind loading and lander structural vibrations inject low-frequency mechanical noise into the ground that can mask seismic signals of interest [13].
These cumulative issues open a new avenue for developing robust passive filtering mechanisms for Venus seismic detection. Such filters can differentiate authentic seismic events from a noisy background, and conserve limited power resources by preventing unnecessary event recording. Analysis of Venera-14 data [9] illustrates that, without effective real-time filtering, raw seismic streams are dominated by noise, requiring extensive post-processing to isolate signals of interest. An optimal framework should therefore enhance sensitivity in the sub-Hz range while attenuating higher-frequency disturbances, regardless of deployment configuration or landing conditions.
No Venus seismic experiment to date has employed a dedicated passive mechanism to modulate and control the spectral response of the seismic path. We demonstrate such a mechanism, which is a robust, low-pass mechanical filter placed between the ground and the seismometer, to selectively amplify sub-Hz seismic signals while attenuating higher-frequency responses such as wind-induced vibrations.
This approach directly imparts the desired high Q-factor in the sub-Hz range without the impractical task of tuning the entire lander–seismometer assembly, whose wide-band spectral characteristics arise from complex module geometries, diverse materials, and unpredictable landing conditions (as argues in Section 2.1). When tuned appropriately, the seismic path itself becomes a robust passive low-pass filter, amplifying desired signals, attenuating unwanted noise, and reducing false detections. Building on this principle, Section 2.2 introduces the design and implementation of our novel mechanism, and the subsequent sections present a comprehensive evaluation of its effectiveness and robustness. The results of the designs are numerically compared and discussed in Section 3. Section 4 (Discussion) further reconciles this approach with the theoretical broadband strategies commonly used in terrestrial seismology, clarifying why those traditional methods, while valid on Earth, are not feasible on Venus and how the present passive design addresses these constraints. Additional results and analyses are provided in the Supplementary Materials.
2. Methods
2.1. Motivation and Conceptual Framework
Characterizing the seismic path of a lander–seismometer system on Venus is inherently complex. Even when an explicit transfer function can be schematically formulated, as shown in the Supplementary Materials, the resulting dynamics are highly system-specific and often inherit errors from order reduction and component approximations. Additional variability arises from factors such as ground coupling, sensor mounting method, and mounting location (Lognonné et al., 2019). This complexity is evident even in analytically solvable models such as a simple spring-attached inverted pendulum (Lavelle et al., 1991), where deterministic characterization remains vulnerable to modeling uncertainties and ground coupling disturbances.
Given these limitations, it is necessary to step back and consider what an ideal seismic path should behave to be independent of the lander’s complex dynamics, unpredictable landing conditions, and environmental disturbances. For detecting faint sub-Hertz seismic signals, such a path would feature a high Q-factor in that frequency range, amplifying weak ground motion while attenuating higher-frequency response to wind-induced vibrations and other disturbances. Figure 2 illustrates the target spectral response: the solid line (“Ideal”) shows a desired high-Q peak in the sub-Hertz range for amplifying weak seismic signals of interest, along with reduced response at higher frequencies. In contrast, the dashed line (“Original”) represents the unmodified system response, which lacks such selective amplification.
However, achieving this performance by directly tuning the seismic path is impractical: the lander’s wide-band spectral characteristics stem from diverse module geometries and materials; while unpredictable landing conditions such as tilt, ground contact area, and soil properties further complicate and destabilize the tuning process. The Supplementary Materials (Eqs. S1–S4) provide a generalized formulation of the seismic path transfer function and highlight its complexity.
To address this, we introduce a robust, passive mechanical mechanism inserted between the ground and the seismometer to impart the desired spectral shaping. Acting as a low-pass filter, this mechanism enhances sub-Hz sensitivity by increasing the system’s Q-factor while suppressing high-frequency noise, without depending on lander-specific dynamics. The following section details the practical implementation of this concept with a pendulum-based amplification system, along with considerations for robustness, environmental tolerance, and self-alignment.
2.2. Pendulum-Based Mounting Mechanism for Seismic Path Tuning
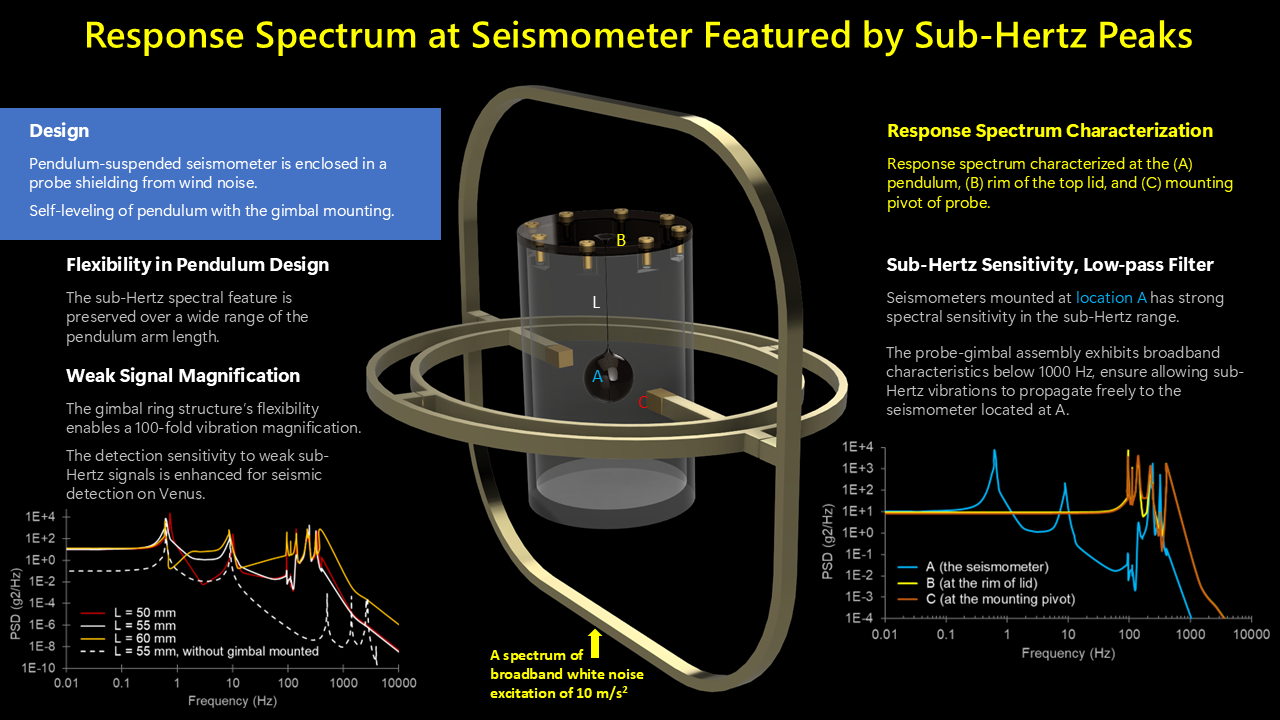
To meet the demanding spectral requirements schematically shown in Figure 2, we designed and characterized a pendulum-based mounting mechanism that is both mechanically simple and inherently robust, two essential features for operation on Venus’s hostile surface. As shown in Figure 3, the conceptual design integrates a vertical pendulum housed in a protective cylindrical enclosure, mounted on a three-ring gimbal to maintain alignment with gravity despite uneven terrain or lander tilt.
At its core, the pendulum acts as a passive mechanical filter. The seismic sensor, located in the pendulum’s bob (point A, Figure 3), is suspended from the enclosure’s top lid by a stiff rod of adjustable length L. By tuning this length (see Table 1), in the Results section we will show that the pendulum’s natural frequency can be set below 1 Hz for passively magnifying faint, long-period ground motions, while naturally rejecting higher-frequency disturbances such as wind-induced vibrations. This built-in spectral selectivity removes the need for complex active filtering or exhaustive system modeling.
The cylindrical enclosure can be adapted into a pressure vessel for continuous operation in Venus’s extreme temperature (~460 °C) and pressure (~92 bar) conditions. An additional horizontal pendulum (not shown) could be included to measure vertical motion, extending the system’s detection capability.
Venus landings are imperfect, and uneven terrain can tilt the lander. Such misalignment not only reduces seismic sensitivity by shifting the sensing axis away from gravity but also increases energy consumption in data transmission due to a badly aligned antenna feed line. To mitigate both issues, the cylindrical housing can be mounted within a gimbal-ring mechanism for self-leveling, as shown in Figure 3. This ensures that the sensing axis remains aligned with gravity and the antenna feed maintains optimal geometry, preserving seismic measurement accuracy and minimizing wasted transmission power.
Table 1 lists the key design parameters, including geometry, material properties, and gimbal dimensions, that were refined through iterative trials to achieve the desired transmissibility profile in Figure 2. The combination of mechanical simplicity, passive robustness, and adaptability makes this design a promising candidate for future Venus lander missions, as will be demonstrated in the numerical performance evaluation that follows.
3. Results
3.1. Spectral Response of Pendulum-Based Passive Mounting Mechanism
Using the dimensions and material properties listed in Table 1, the spectral response of the design was numerically evaluated under white-noise excitation A broadband random acceleration input with a flat ASD was applied and scaled to produce an RMS acceleration of 10 m/s² over the 0.01–1000 Hz band. The excitation was imposed at the bottom plate when the housing was modeled alone, and at the base of the gimbal when the housing was mounted to the gimbal. Material damping was neglected. Figure 4 presents the resulting power spectral density (PSD) responses for pendulum lengths of 50, 55, 60, and 71 mm, with and without gimbal mounting.
3.1.1. PSD at Pendulum Bob
The pendulum bob is at Location A in Figure 3. In 0.1–1 Hz, for both the housing-only (non-gimbaled) and gimbal-mounted configurations, all the simulated conditions exhibit a consistent preservation of a high-Q spectral feature across a range of pendulum lengths. The sub-Hertz response is indeed governed by the vibrational characteristics of the pendulum, as can be evident by its fundamental natural frequency (calculated separately) in 1.7–2 Hz for each configured pendulum pivoted alone. The added mass and inertia of the gimbal mounting pushed this peak frequency higher but remained below 1 Hz. Notably, the sub-Hertz peak frequencies remain largely unchanged with arm length variations, indicating that sub-Hz detection is insensitive to pendulum length design.
In 1-10 Hz, when not gimbaled, the PSD at the bob of the assembly declines for the non-gimbaled configuration (dashed lines), indicating a strong attenuation of transmitted signals in this range. In contrast, when the gimbal is used (solid lines), the PSD remains flat so less effective in attenuating wind noise of 2-3 Hz on Venus than the non-gimbaled. It is probably inherent to the compliant gimbal structure,
The plots in Figure 4 show a consistent sub-Hz amplification across all simulated configurations. The persistence of these narrow, high-Q peaks, largely unchanged by the addition of the cylindrical housing or the three-ring gimbal, demonstrates that the resonance behavior is dominated by the pendulum geometry, not by secondary structural elements. This insensitivity and robustness reflect a key requirement for Venus operations, where deployment uncertainties and platform interactions cannot be tightly controlled. Notably, the un-gimbaled configuration behaves as an effective mechanical band-pass filter, as it concentrates sensitivity in the 0.5–0.8 Hz range while providing substantial attenuation above 2 Hz. Because wind-induced lander and housing vibrations on Venus are expected to excite structural modes primarily in the 2–4 Hz range, this inherent attenuation directly suppresses those disturbances before they reach the sensor, providing a robust, passive means of rejecting platform-induced noise.
3.1.2. PSD Response at the Mounting Structures (Locations B, C, and D)
The PSD curves for the rim of the top lid (Location B, Figure 3) and the mounting points (Locations C and D) remain spectrally constant in the 0.1-1000 Hz range. These broadband spectra neither disrupts vibration transmission nor causes undesired signal amplification. Numerical simulations show that PSD at B is approximately 10% larger than at D, which in turn is slightly larger than at C. The difference is likely attributed to the inherent rigid-body motion of relatively stiff components in the assembly. The constant PSD spectra at these locations indicate that the mounting structure transmits signals through various extents of rigid-body movement in the 0.1-1000 Hz.
During vibration, each moving part of the assembly has an instantaneous center of rotation. The kinematic lever-arm effect determines the magnitude of rigid-body motion at a point based on its distance r from its center of rotation. For simplicity, the center of rotation for the rim of the top lid (location B) can be taken as the pivot axis of the housing mounting, which lies farther from B than D’s center of rotation near the gimbal pivot. Because gimbal rings are typically stiffer in-plane than thin cylindrical walls, the cylindrical housing can ovalize and the lid can dish slightly, both of which further amplify the lever-arm effect at B relative to D.
The constant spectral response at these locations confirms that the housing and gimbal do not interfere with the intended sub-Hertz detection. Consequently, sub-Hz seismic signals can propagate freely through the relatively stiff housing and gimbal without distortion. This supports the design choice of placing the seismometer at the pendulum bob, where the pendulum’s natural low-pass filtering isolates sub-Hertz seismic signals from higher-frequency disturbances.
3.1.3. Transmissibility (Transfer Function)
The transmissibility is defined as the ratio of the acceleration at the pendulum’s bob, where the seismometer is located, to that of the input. It effectively represents the system’s input–output transfer function. The acceleration was calculated as the root-mean-squared (RMS) acceleration, calculated by integrating the PSD at a location over a 1/3-octave bands centered at logarithmically evenly spaced frequencies. Figure 5 compares the transmissibility of several gimbaled pendulum configurations with varying effective lengths (L = 50 mm, 55 mm, and 60 mm) and un-gimbaled (L = 71 mm). For linear systems under harmonic excitation, the shapes of the displacement and acceleration transmissibility curves are identical, differing only by a frequency-squared scaling factor.
In the regime under 0.1 Hz, the transmissibility curves roll-off with a linearly increasing gain on a log-log scale regardless of the set configurations. This behavior, inherently attenuating low-frequency signals, is consistent with the characteristics of a vibrational system under base excitation.
In the 0.1-1 Hz regime, the transmissibility curves all display a high Q-factor peak in a very narrow bandwidth. The local amplification around each peak indicates the system’s capacity to magnify ground motion (input excitation), which favors the detection of weak signals within this narrow frequency band while simultaneously attenuating non-target signals. In contrast, the configurations of un-gimbal mounting (L = 71 mm) and gimbaled mounting (L = 60 mm) show generally lower transmissibility across most of the frequency spectrum, implying a reduced frequency sensitivity. A careful design of the central frequency of this sub-Hertz peak is crucial for optimizing SNR. It is noted that the resonance peaks are theoretically open topped because damping is excluded from the simulation models. The closed or flattened appearance in the plots is a numerical artifact caused by discretized frequency sampling and curve-connecting, which omit fine details near the peaks. For instance, in the un-gimbaled L = 71 mm and gimbaled L = 60 mm configurations, the seemingly lower peaks still correspond to sharp, high-Q resonances with extremely narrow bandwidths—the reduced magnitudes result solely from insufficient frequency resolution, not actual lower amplification.
3.2. Minimum Level of Detection
Figure 6 compares the minimum detectable RMS ground acceleration for several passive mounting configurations under three sensor noise floors (ASD = 10⁻⁶, 10⁻⁷, and 10⁻⁸ m/s²/√Hz). Each subplot corresponds to a specific ASD level in the noise floor, enabling direct comparison between a standalone sensor and the various pendulum-mounted designs. Across all noise levels, the curves exhibit the same characteristic behavior: reductions in the sensor noise level (in ASD) uniformly shift the detection threshold downward. This trend is essentially the inverse of the transmissibility behavior shown in Figure 5.
Within narrow sub-Hz resonant bands, particularly when coupled with the gimbaled suspension, the mechanism can lower the threshold of detectable ground RMS accelerations relative to the sensor alone, across all three noise levels. However, the enhancement is confined to these narrow resonant windows, limiting adaptiveness to broadband or unpredictable signals. This reflects a fundamental trade-off of passive magnification: wave energy is redistributed before reaching the sensor, amplifying signals within the designed resonant band but attenuating others [16]. For instance, the gimbaled L = 60 mm configuration provides a very narrow resonant bandwidth that improves the detection threshold only when signals fall within that band. Such selectivity can be restrictive in environments where seismic frequencies are uncertain. On the other hand, if prior modeling or mission data suggest dominant surface-wave frequencies, as expected for Venus, tuning the mechanical resonance to those bands can strategically enhance detectability where it matters most. Thus, while narrow-band amplification is less adaptive than broadband sensitivity, it offers a viable pathway for planetary seismic detection if resonance features are carefully matched to target signal characteristics.
3.3. Maximum Number of Annual Surface Quake Detectable
The enhanced sensitivity of the gimbaled pendulum-based seismic detector is also evaluated for its capability of reducing the (estimated) minimum number of detectable seismic events per magnitude per year in this section.
The surface-wave magnitude of a given seismic event, , can be directly related to the vertical ground displacement amplitude of period and epicentral distance per [5]:
According to this framework, the maximum detectable epicentral distance defines the maximum surface area over which at least one surface wave magnitude of can be detected. The surface area on a spherical planet of radius can be approximated as a cap area spanned by a cap angle of as:
The ratio between and the planet’s total surface area defines the probability that a seismic event of surface wave magnitude of will occur within . For the case of a single seismic detector deployed on the planet’s surface, detecting at least one such event requires that the global annual number of events be no less than . Accordingly, the minimum annual number of events detectable by a single sensor operating at an observation interval of ℎ hours can be expressed as [5]:
Minimizing hinges on lowering the detection threshold for the displacement amplitude , as detailed below.
Because scales logarithmically with , a slight improvement in ground-motion sensitivity can greatly enlarge the detectable area and lower for a given observation period. Leveraging this principle, the amplification feature of the presented pendulum-based mechanism, when appropriate tuned, can further reduce compared to the sensor-only results of Garcia et al. [5], as shown below.
Figure 7 shows the predicted minimum detectable event rates for the 12-h observation window and sensor noise level of 10-8 m/s2/√Hz at wave frequency at 0.5, 0.6, 0.75, and 0.05 Hz. A detection SNR of 3 was used in calculations. At very low frequency such as 0.05 Hz (Figure 7d), all pendulum-mounted configurations behave nearly identically and perform about two orders of magnitude worse than the baseline “sensor only” case. This reflects quasi-static rigid-body motion of the gimbal–pendulum mechanism, which provides little benefit for very long-period detection.
At sub-Hz frequencies (≥0.6 Hz), the gimbaled mounts significantly enhance sensitivity when pendulum lengths are tuned between 50-55 mm. In this regime, the minimum detectable event rate improves by 1-2 orders of magnitude relative to the bare sensor, particularly for moderate magnitudes ( in 3-6). This demonstrates an optimal condition in which the passive resonance tuning via the pendulum–gimbal mounting functions effectively. Additional comparative curves are provided in the Supplementary Materials for three representative sensor noise floors in 10-8 – 10-6 m/s2/√Hz and evaluated at different sub-Hz frequencies near the respective resonant bands.
Across all frequencies, the relative curve shapes are preserved, while absolute values follow approximate power-law scaling:
Details are provided in the Supplementary Materials with benchmarks.
Figure 7 and Figures S2-S5 confirm that passive amplification mechanisms can reduce the minimum detectable event rate by up to two orders of magnitude compared with sensor-alone operation. For example, at a noise floor of 10-7 m/s2/√Hz, a gimbaled pendulum of 0.5 m length achieves ~30× higher detection probability than a direct sensor at 2-5 at 0.8 Hz (Figure S2(b)), while an un-gimbaled pendulum of 71 mm length yields a 2× gain. at 0.5 Hz (Figure S5(a)). The improvements are concentrated in the 0.1–1 Hz range, coinciding with the spectral content expected for Venusian surface waves.
These results imply clear design tradeoffs. Longer or gimbaled pendula deliver the greatest sensitivity gains but increase structural complexity, while compact un-gimbaled systems offer simpler deployment with moderate (~2×) improvements. From a mission-planning perspective, even modest amplification can allow a 12-hour lander to match the detection probability of a standalone sensor operating several days, substantially extending the effective observational yield within the limited lifetime of Venus surface missions.
The design can be refined to broaden robustness and adaptability without losing passivity, by considering (i) multiple staggered resonances (two pendula of different lengths or a compound/branched pendulum), (ii) discrete, field-settable lengths (e.g., pinned holes or a threaded adjustment set pre-deployment), and/or (iii) light damping to trade a bit of peak gain for wider bandwidth. Because improvement grows with ASD, the mount can up-tier lower-cost MEMS toward science-usable thresholds, which is potentially valuable for power/thermal-limited Venus concepts. To address the environmental drift & calibration issue, a more holistic design should consider selecting low-drift materials and in-situ calibration taps (or self-noise spectral checks) to track resonance over time. If multiple sensing units were budgeted for operational diversity, stagger their tuned frequencies to hedge environmental uncertainty and increase aggregate bandwidth.
4. Discussions
Although broadband seismology on Earth routinely records wide spectral content and relies on high-dynamic-range digitization plus offline digital filtering to remove high-frequency noise, that approach presumes low instrument thermal drift, high-bandwidth ADCs, and power/thermal margins not available for Venus surface conditions. Broadband inertial sensors and force-feedback designs (e.g., STS/Trillium class instruments) and the associated digitization and processing enable post-hoc noise subtraction and instrument correction or calibration on Earth because the analog chain preserves the band of interest at adequate resolution [16]. However, this Earth-based approach will be less feasible on Venus. Venus surface conditions (~460 °C, ~92 bar), stringent power budgets, limited thermal control, and extreme platform-induced vibration/pressure coupling make wide-band, high-dynamic-range acquisition impractical: signals in the 0.5–1 Hz band would be susceptible to ADC saturation, thermal drift and irreversible contamination by platform (e.g., lander) noise before any digital filtering can be applied.
The passive mechanical pre-filter introduced in this work directly addresses these constraints by attenuating broadband platform noise in the analog domain while concentrating sensitivity in the predicted 0.5–0.8 Hz seismic band. This reduces ADC dynamic-range demands and limits sensitivity to the frequencies of scientific interest, thereby improving detectability under Venus surface conditions without relying on wideband electronics or extensive post-processing. The approach provides a pragmatic alternative to Earth-style wide-band acquisition and offers a viable pathway for short-lived missions where thermal control, power margins, and electronic robustness are severely limited.
5. Conclusions
Understanding the spectral correlation between the ground excitation and the sensor’s response is essential for achieving sensitive detection of desired seismic signals while minimizing noise. This paper presented a novel methodology to increase the sensitivity of an integrated lander/seismometer system for Venusquake detection, specifically within the 0.1-1 Hz range, while effectively attenuating higher-frequency signals. The methodology was elaborated first with a schematic of a desired transfer function of the lander/seismometer system (Figure 2) for Venusquake detection. To implement this methodology, a pendulum-based sensor-mounting mechanism was developed, where a seismometer (acting as the pendulum) is suspended within a cylindrical probe. With carefully chosen dimensions and materials, this mechanism demonstrated two high-Q peaks in the 0.5–0.8 Hz range, which is ideal for amplifying weak seismic signals in the sub-Hertz range. This design enhances sensitivity within the 0.1–1 Hz range and is adaptable to different lander configurations or ground deployments. Additionally, a self-levelling mechanism integrated into the probe ensured proper vertical alignment and attenuated signals above 1 Hz, functioning as a low-pass filter. This mechanism preserves the desired high-Q resonant bandwidth for amplifying sub-Hertz seismic signals, confirming the satisfactory transmissibility of seismic signals from the ground to the sensor with minimal interference from the probe’s housing and self-leveling system. Future research could refine these designs for comprehensive all-direction seismic detection with enhanced sensitivity and robustness, explore alternative materials and structural configurations, and validate performance predictions through laboratory and field tests under Venus-like conditions.
Supplementary Materials
The following supporting information can be downloaded at the website of this paper posted on Preprints.org. Figure S1: Schematics of the seismometer/lander coupled system. The lander vibrates in response to quake waves and environmental noise, which then triggers the seismometer to respond; Figures S2–S5: Comparisons of sensor-only (baseline) performance with gimbaled pendulum mounts of varying lengths (50–71 mm) for the predicted minimum detectable seismic events, ; results are shown for a 12-h observation window, evaluated with SNR = 3 at three ASD levels (10⁻⁸–10⁻⁶ m/s²/√Hz) and at wave frequencies ranging from 0.6 to 0.95 Hz; each figure presents results for an individual frequency.
Author Contributions
Conceptualization, C.C. and M.O.; methodology, C.C. and M.O..; software, C.C., M.O. and N. S.; validation, C.C., M.O. and N.S.; formal analysis, C.C., M.O. and N. S.; investigation, C.C., M.O. and N. S.; resources, C.C.; data curation, C.C.; writing—original draft preparation, C.C., M.O. and N. S.; writing—review and editing, C.C.; visualization, C.C.; supervision, C.C.; project administration, C.C. All authors have read and agreed to the published version of the manuscript.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Acknowledgments
The authors thank Prof. Robert R. Herrick (Institute of Northern Engineering, University of Alaska Fairbanks) for his thorough review and insightful comments on this manuscript.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| ADC | Analog-to-digital conversion |
| SNR | Signal-to-noise ratio |
| ASD | Amplitude spectrum density |
| PSD | Power spectrum density |
| RMS | Root-mean-squared |
| LLISSE | Long Lived In-situ Solar System Explorer |
| SEIS | Seismic Experiment for Interior Structure |
| SAEVe | Seismic and Atmospheric Exploration of Venus |
References
- Herrick, R.R.; Hensley, S. Surface changes observed on a Venusian volcano during the Magellan mission. Science (1979) 2023, 379(6638), 1205–8. [Google Scholar] [CrossRef] [PubMed]
- Lognonné, P.; Johnson, C.L. Planetary Seismology. Treatise on Geophysics: Second Edition 2015, 10(4), 65–120. [Google Scholar]
- Kremic, T.; Ghail, R.; et al. Long-duration Venus lander for seismic and atmospheric science. Planet Space Sci. 2020, 190. [Google Scholar] [CrossRef]
- Krishnamoorthy, S.; Komjathy, A.; et al. Detection of Artificially Generated Seismic Signals Using Balloon-Borne Infrasound Sensors. Geophys Res Lett. 2018, 45(8), 3393–403. [Google Scholar] [CrossRef]
- Garcia, R.F.; van Zelst, I.; et al. Seismic Wave Detectability on Venus Using Ground Deformation Sensors, Infrasound Sensors on Balloons and Airglow Imagers. Earth and Space Science 2024, 11(11), e2024EA003670. [Google Scholar] [CrossRef]
- Panning, M.P.; Pike, W.T.; et al. On-Deck Seismology: Lessons from InSight for Future Planetary Seismology. J Geophys Res Planets 2020, 125(4), e2019JE006353. [Google Scholar] [CrossRef]
- Sun, W.; Tkalčić, H.; et al. Spectral characteristics and implications of located low-frequency marsquakes and impact events from InSight SEIS observations. Physics of the Earth and Planetary Interiors 2025, 361, 107334. [Google Scholar] [CrossRef]
- Banerdt, B. EPSC Abstracts: InSight’s Contributions to Planetary Seismology and Geophysics. Europlanet Science Congress 2022, 2022; 16, p. 773. [Google Scholar]
- Ksanfomaliti, L. V.; Zubkova, V.M.; et al. Microseisms at the VENERA-13 and VENERA-14 Landing Sites. Soviet Astronomy Letters 1982, 8, 241–2. [Google Scholar]
- Kremic, T.; Hunter, G.W. Long-Lived In-Situ Solar System Explorer (LLISSE) Potential Contributions to Solar System Exploration. Bulletin of the American Astronomical Society 2021, 53(4), e–id. 151. [Google Scholar]
- Lognonné, P.; Banerdt, W.B.; et al. SEIS: Insight’s Seismic Experiment for Internal Structure of Mars. Space Sci Rev. 2019, 215(1). [Google Scholar] [CrossRef] [PubMed]
- Schon, K. Transfer behavior of linear systems, convolution and deconvolution. Power Systems 2019, 269–306. [Google Scholar]
- Murdoch, N.; Mimoun, D.; et al. Evaluating the Wind-Induced Mechanical Noise on the InSight Seismometers. Space Sci Rev. 2017, 211(1–4), 429–55. [Google Scholar] [CrossRef]
- Murdoch, N.; Alazard, D.; et al. Flexible Mode Modelling of the InSight Lander and Consequences for the SEIS Instrument. Space Sci Rev. 2018, 214(8), 1–24. [Google Scholar] [CrossRef]
- Stott, A.E.; Charalambous, C.; et al. The Site Tilt and Lander Transfer Function from the Short-Period Seismometer of InSight on Mars. Bulletin of the Seismological Society of America 2021, 111(6), 2889–908. [Google Scholar] [CrossRef]
- Ackerley, N. Principles of Broadband Seismometry. Encyclopedia of Earthquake Engineering 2015, 1941–70. [Google Scholar]
Figure 1.
Ground/mechanical coupling. An output signal is convolution of the input signal and the vibrational characteristics of the media, which includes the ground and the mechanical coupling, in the seismic path.
Figure 1.
Ground/mechanical coupling. An output signal is convolution of the input signal and the vibrational characteristics of the media, which includes the ground and the mechanical coupling, in the seismic path.
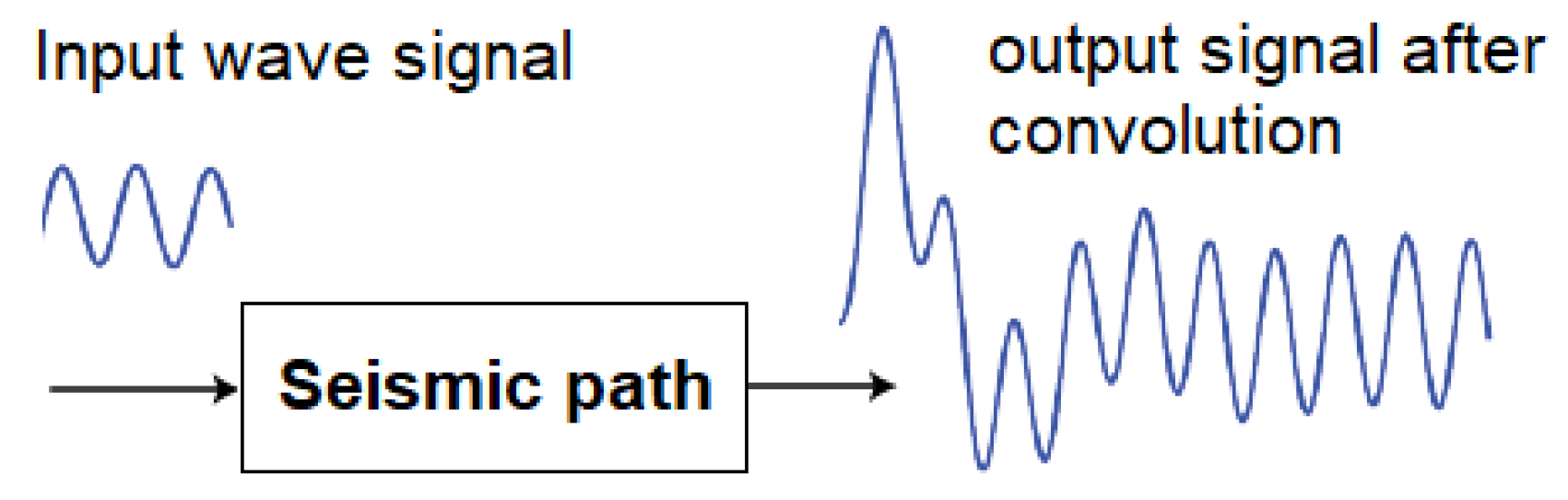
Figure 2.
Schematics of an ideal transfer function for an integrated lander/seismometer system. A desired high-Q magnitude is depicted in the sub-Hertz spectral range of the ideal transfer function to amplify weak seismic signals of interest. The response spectrum of the original system can be attenuated to reduce the mechanical noise induced by structural vibrations at higher frequencies.
Figure 2.
Schematics of an ideal transfer function for an integrated lander/seismometer system. A desired high-Q magnitude is depicted in the sub-Hertz spectral range of the ideal transfer function to amplify weak seismic signals of interest. The response spectrum of the original system can be attenuated to reduce the mechanical noise induced by structural vibrations at higher frequencies.
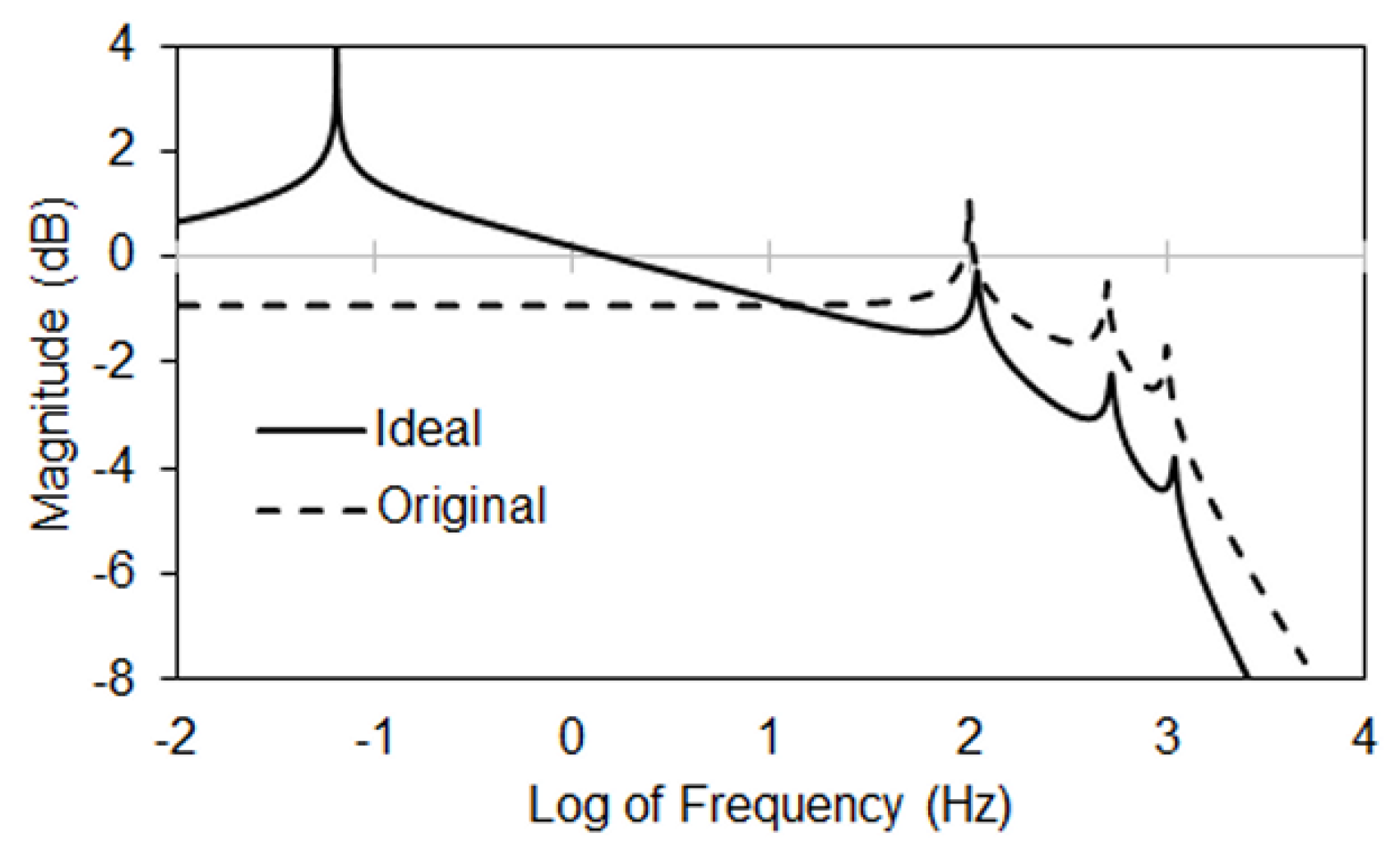
Figure 3.
Pendulum-based seismometer mounting design. A: pendulum bob; B: rim of the housing’s top lid. C: housing mounting pivot; D: three-ring gimbal mounting pivo; L: pendulum length.
Figure 3.
Pendulum-based seismometer mounting design. A: pendulum bob; B: rim of the housing’s top lid. C: housing mounting pivot; D: three-ring gimbal mounting pivo; L: pendulum length.

Figure 4.
Power spectral densities (PSDs) of the pendulum-based seismometer mounting mechanism. (a) PSD at locations as labeled in Figure 3. (b) Sub-Hz PSD comparison at the pendulum bob.
Figure 4.
Power spectral densities (PSDs) of the pendulum-based seismometer mounting mechanism. (a) PSD at locations as labeled in Figure 3. (b) Sub-Hz PSD comparison at the pendulum bob.
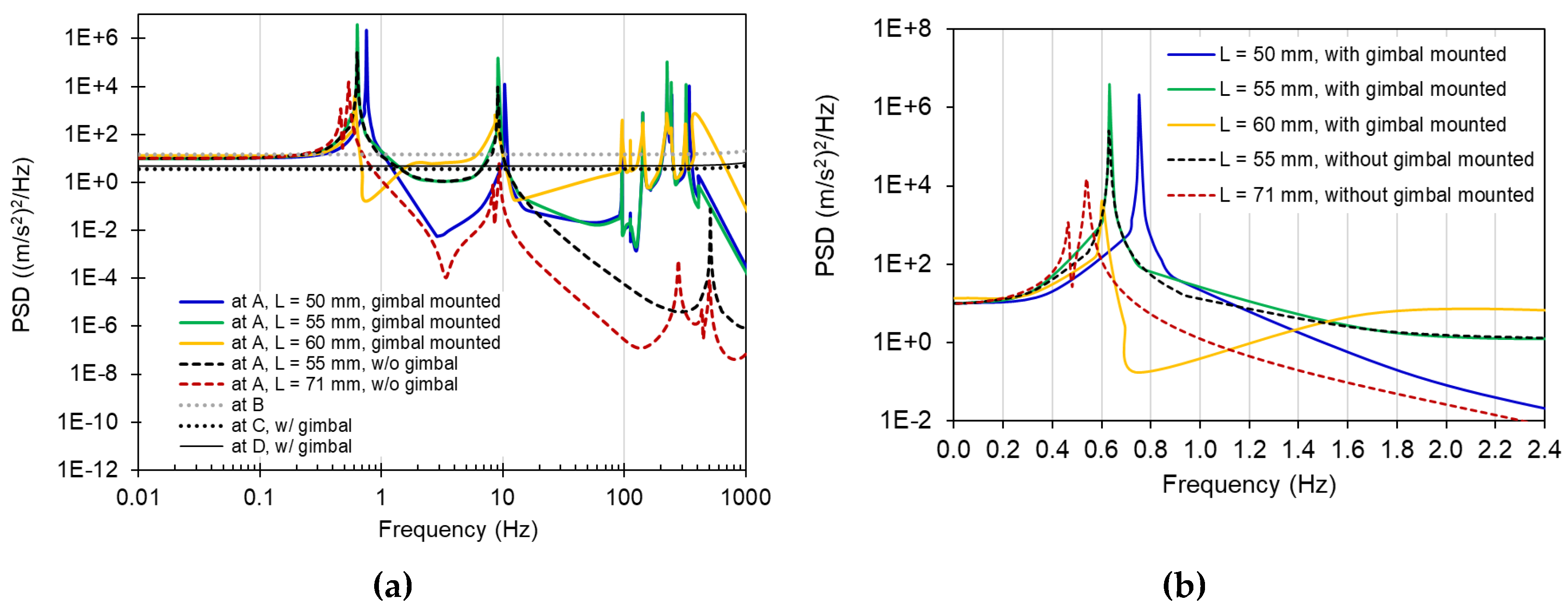
Figure 5.
Transmissibility curves for pendulum-based seismic detection with various pendulum lengths (L = 50–71 mm). Without damping, the apparent closed peaks are artifacts of numerical resolution and curve plotting; the true resonance peaks are open topped.
Figure 5.
Transmissibility curves for pendulum-based seismic detection with various pendulum lengths (L = 50–71 mm). Without damping, the apparent closed peaks are artifacts of numerical resolution and curve plotting; the true resonance peaks are open topped.
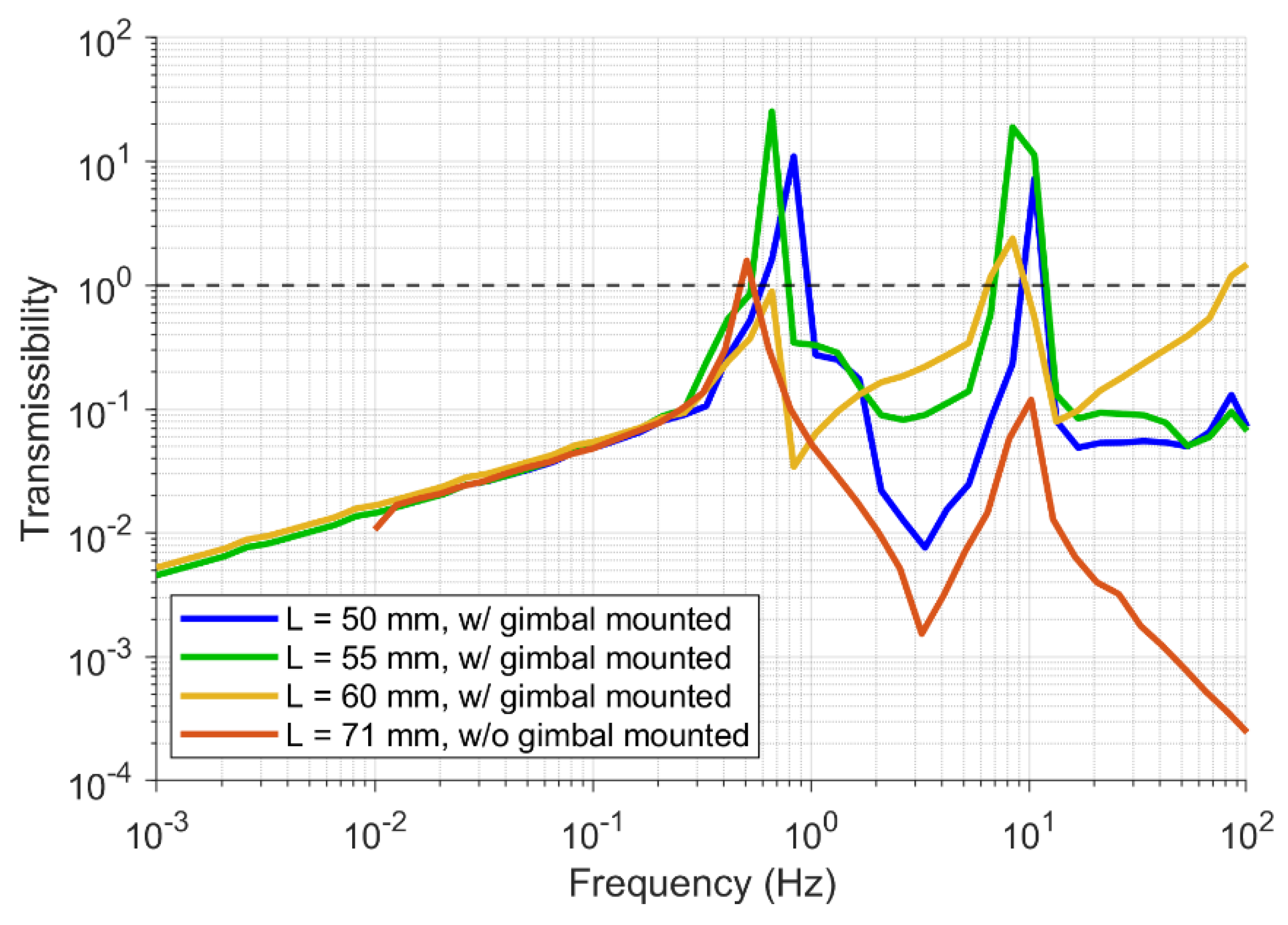
Figure 6.
Minimum detectable ground RMS acceleration for different sensor noise levels (in ASD, as titled), comparing direct deployment with pendulum-mounted configurations. Sensitivity improves near resonances but compromises elsewhere due to signal attenuation.
Figure 6.
Minimum detectable ground RMS acceleration for different sensor noise levels (in ASD, as titled), comparing direct deployment with pendulum-mounted configurations. Sensitivity improves near resonances but compromises elsewhere due to signal attenuation.
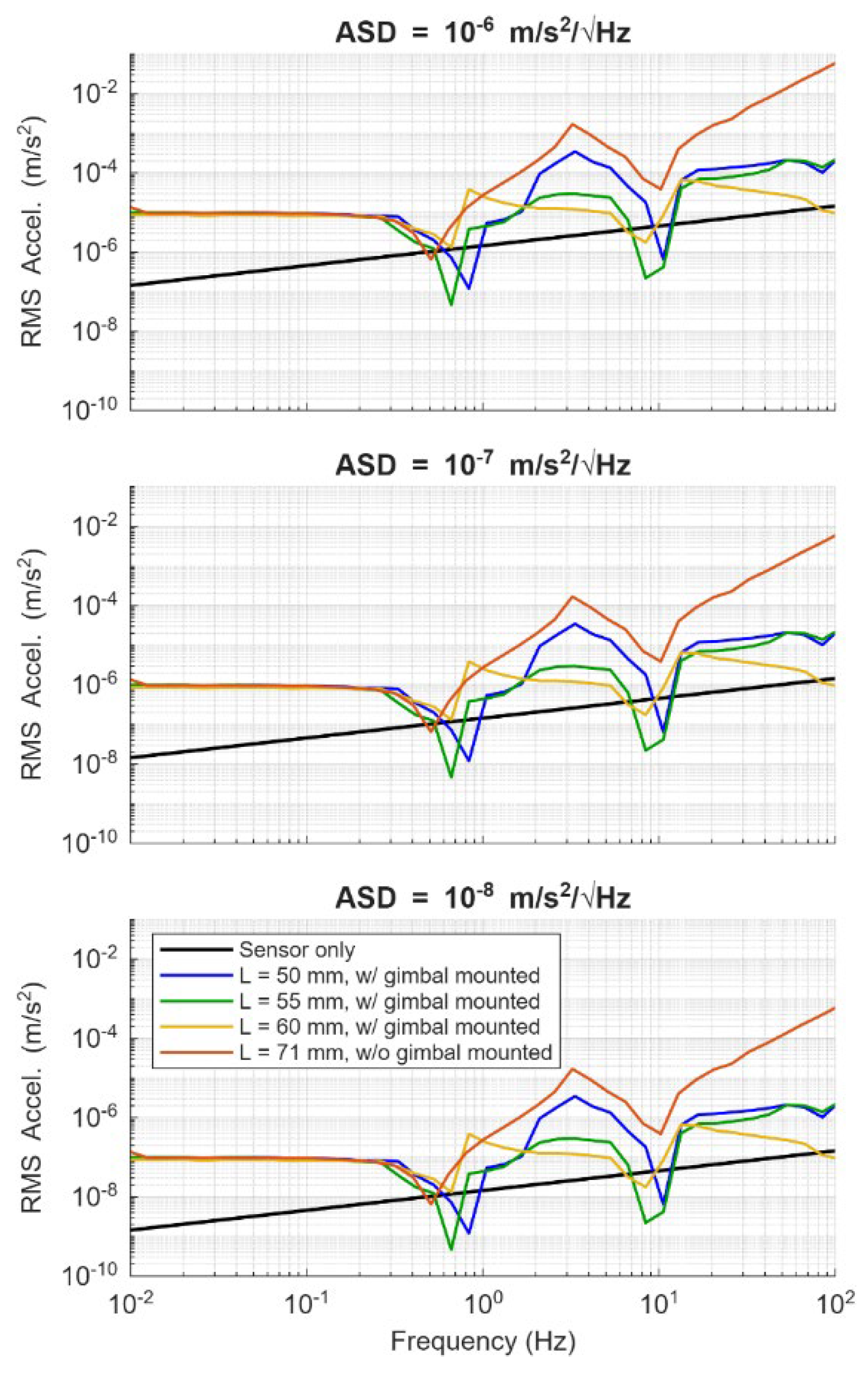
Figure 7.
Predicted minimum detectable seismic events () for 12-h observation. ASD = 10-8 m/s2/√Hz, and SNR = 3, at wave frequencies of (a) 0.5 Hz, (b) 0.6 Hz, (c) 0.75 Hz, and (d) 0.05 Hz. Curves compare baseline sensor-only (black-dotted) with gimbaled pendulum mounts of length 50 mm (blue), 55 mm (green), 60 mm (orange), and an un-gimbaled 71 mm case (red).
Figure 7.
Predicted minimum detectable seismic events () for 12-h observation. ASD = 10-8 m/s2/√Hz, and SNR = 3, at wave frequencies of (a) 0.5 Hz, (b) 0.6 Hz, (c) 0.75 Hz, and (d) 0.05 Hz. Curves compare baseline sensor-only (black-dotted) with gimbaled pendulum mounts of length 50 mm (blue), 55 mm (green), 60 mm (orange), and an un-gimbaled 71 mm case (red).
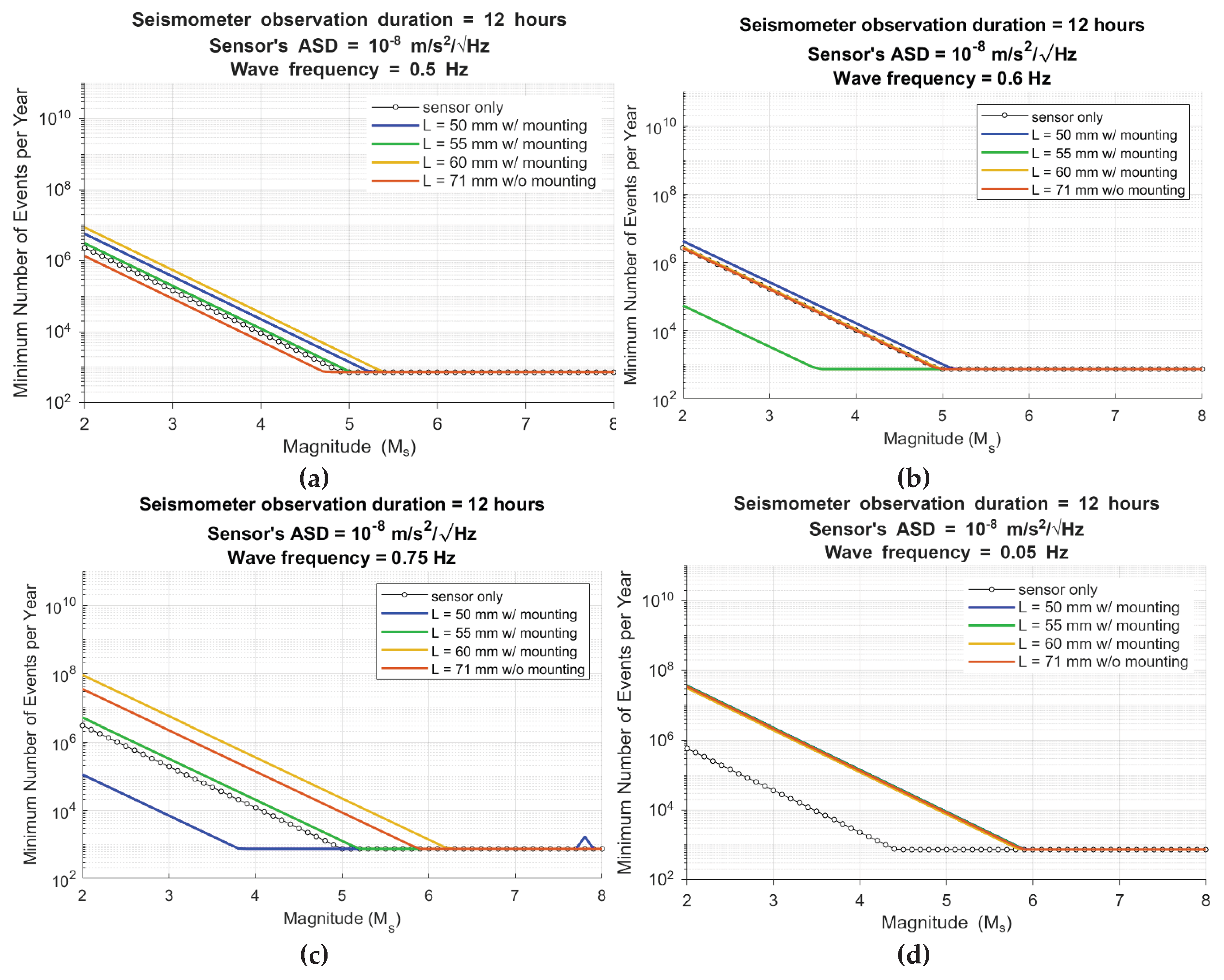

Table 1.
Parameters of the pendulum-based seismic amplification design.
| Pendulum | |
|---|---|
| Arm length L (mm) Arm diameter (mm) Bob diameter (mm) |
50 - 71 0.4 30 |
| Cylindrical housing | |
| Diameter (mm) Height (mm) Wall thickness (mm) |
100 130 5 |
| Gimbal ring | |
| Ring’s cross-sectional area (mm2) Diameter Outer ring (mm) Middle ring (mm) Inner ring (mm) |
10 × 10 320 260 200 |
| Ring connector length Outer-middle (mm) Middle-inner (mm) Inner cylinder (mm) |
20 20 40 |
| Material | Ti6Al4V |
| Young’s modulus (GPa) Poisson’s ratio Density (g/cm3) |
110 0.30 4.45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



