Submitted:
05 December 2025
Posted:
08 December 2025
You are already at the latest version
Abstract
Post-disaster rescue operations require rapid and efficient coordination of heterogeneous 2
unmanned systems to locate survivors and deliver supplies in dynamic, uncertain environ- 3
ments. Existing approaches predominantly adopt a static task allocation paradigm, which 4
fails to adapt to scenarios where new survivors are continually discovered and obstacles 5
appear unexpectedly. This paper proposes ED-MOEA (Event-Driven Multi-Objective Evolu- 6
tionary Algorithm), establishing a closed-loop cooperative sensing-planning mechanism for 7
heterogeneous UAV-UGV systems. The core innovation lies in an event-triggered dynamic 8
replanning strategy: when UAVs detect new task points or obstacles during flight, the 9
system immediately broadcasts information to UGVs and triggers a warm-start replanning 10
process. The problem is formulated as a three-objective optimization considering makespan 11
minimization, energy consumption minimization, and task coverage maximization, while 12
accounting for heterogeneous mobility constraints—UAVs can fly directly over obstacles 13
while UGVs must navigate around them. Experiments on five benchmark scenarios and 14
a real case based on the 2024 Hualien earthquake demonstrate that ED-MOEA achieves 15
the highest hypervolume (HV) across all scenarios, outperforming existing multi-objective 16
algorithms including NSGA-III, MOEA/D-DE, RVEA, and LMEA. The heterogeneous 17
coordination achieves 16.7% higher task coverage compared to UAV-only systems (0.910 18
vs. 0.780), while the warm-start strategy significantly accelerates replanning convergence 19
(over 35% reduction in generations required), ensuring real-time response capability under 20
6 seconds for scenarios with up to 70 tasks.
Keywords:
heterogeneous multi-robot systems
; UAV-UGV coordination
; dynamic task allocation
; event-triggered replanning
; multi-objective optimization
; post-disaster rescue
1. Introduction
The April 3, 2024 Hualien earthquake in Taiwan (magnitude 7.2) resulted in 18 fatalities and over 1,100 injured, with numerous buildings collapsed and critical infrastructure damaged. This event highlighted the urgent need for rapid, coordinated rescue operations in challenging post-disaster environments. Traditional rescue operations rely heavily on human responders who face significant risks when traversing unstable structures and hazardous conditions. The integration of Unmanned Aerial Vehicles (UAVs) and Unmanned Ground Vehicles (UGVs) offers a promising solution for improving rescue efficiency while reducing personnel exposure to dangerous environments [1,2,3,4].
UAVs possess superior aerial reconnaissance capabilities, enabling rapid coverage of large areas through onboard sensors and cameras. Their ability to traverse ground-level obstacles makes them ideal for initial damage assessment and survivor detection. However, UAVs are constrained by limited payload capacity (typically <5 kg) and battery endurance (20–40 minutes), restricting their ability to deliver heavy supplies or maintain prolonged operations. Conversely, UGVs offer complementary advantages: higher payload capacity (10–50 kg), extended operational endurance (2–8 hours), and the ability to deliver rescue equipment directly to survivors [7,8,9].
Despite the potential of heterogeneous UAV-UGV systems, existing approaches predominantly adopt a static allocation paradigm—assigning tasks during the planning phase and executing without adjustment [15,17]. This paradigm conflicts with post-disaster dynamics: new survivors may be discovered, aftershocks may create new obstacles, and agent operational states may change unexpectedly. The inability to adapt leads to suboptimal rescue outcomes and potentially dangerous situations where agents attempt to execute outdated plans.
The core challenge addressed in this paper is establishing an effective cooperative sensing-planning closed-loop for real-time adaptation. Specifically, we develop a framework where: (1) UAVs continuously perceive the environment during flight, detecting new task points or obstacles; (2) detected changes trigger an event-driven replanning mechanism; (3) UGVs receive updated plans and dynamically adjust routes.
This paper proposes ED-MOEA (Event-Driven Multi-Objective Evolutionary Algorithm), with three key contributions:
- Event-triggered dynamic replanning: An event detection mechanism that monitors UAV perception outputs, initiating replanning only when significant changes occur (new task discovery or obstacle detection), avoiding unnecessary computational overhead while ensuring timely response.
- Warm-start initialization strategy: When replanning is triggered, the current assignment structure for remaining tasks is preserved and used to seed the initial population, significantly accelerating replanning convergence compared to random initialization while maintaining solution diversity.
- Heterogeneous mobility-aware encoding: A two-segment chromosome encoding that captures the fundamental differences between UAV (direct flight) and UGV (obstacle-avoiding navigation) mobility patterns.
2. Related Work
2.1. Heterogeneous Multi-Robot Task Allocation
The Multi-Robot Task Allocation (MRTA) problem has been extensively studied [14]. Gerkey and Matarić proposed a taxonomy classifying MRTA problems according to robot capabilities, task requirements, and allocation timing. Heterogeneous MRTA requires consideration of task-robot compatibility, adding significant complexity [16,17].
Recent UAV-UGV coordination has shown progress across various domains. Tokekar et al. [10] developed a symbiotic system for precision agriculture. Peterson et al. [11] proposed consensus-based bundle algorithms for distributed allocation. Duan and Luo [12] introduced adaptive collaborative optimization. Robin and Lacroix [13] provided a comprehensive survey of multi-robot target detection. Grocholsky et al. [9] demonstrated early work on cooperative surveillance. However, these approaches primarily focus on static environments and lack mechanisms for real-time adaptation to dynamic changes—a critical limitation for disaster rescue scenarios.
2.2. Dynamic Vehicle Routing Problems
Dynamic Vehicle Routing Problems (DVRP) extend classical VRP by considering time-varying requests and travel times [21,22]. Event-driven strategies have shown good performance in balancing solution quality and computational efficiency [23,24].
Wang et al. [25] proposed rolling horizon optimization for multi-drone delivery. Nunes and Gini [18] developed auctions for task allocation with temporal constraints. Turner et al. [19] addressed distributed task rescheduling. Otte et al. [20] extended auction-based methods to communication-limited environments. While these methods handle dynamic requests, they typically assume homogeneous vehicle fleets and do not address the heterogeneous mobility constraints inherent in UAV-UGV systems.
2.3. Multi-Objective Evolutionary Algorithms
Multi-Objective Evolutionary Algorithms (MOEAs) have proven effective for complex optimization with conflicting objectives [26]. NSGA-II [27] and NSGA-III [28] employ non-dominated sorting for solution selection. MOEA/D [29] decomposes problems into scalar subproblems. RVEA [30] adopts reference vector guided evolution. Li et al. [31] proposed algorithms combining dominance and decomposition. LMEA [32] addresses large-scale optimization through decision variable grouping—although effective for high-dimensional problems, it lacks mechanisms for temporal adaptability required in dynamic environments.
2.4. Disaster Rescue Robotics
Disaster rescue robotics has received increasing attention [1,3]. The DARPA Subterranean Challenge drove advances in multi-robot exploration [5]. The TRADR project [6] focused on long-term human-robot teaming. Casper and Murphy [4] documented lessons from the World Trade Center response.
3. Problem Formulation
3.1. System Model
Consider a heterogeneous multi-robot system comprising UAVs and UGVs operating in a post-disaster environment. The environment is represented as a 2D workspace containing obstacle regions that may change over time due to aftershocks or structural collapses.
Let denote UAV agents and denote UGV agents. Each agent k is characterized by:
- Velocity : maximum travel speed (m/s)
- Range : maximum operational distance (m)
- Energy coefficient : energy consumption per unit distance (J/m)
- Sensing radius : perception range for UAVs (m)
Tasks represent rescue points requiring service. Each task has location , service time , and priority . The task set evolves dynamically: .
3.2. Heterogeneous Mobility Constraints
3.3. Objective Functions
The problem is formulated as tri-objective optimization:
Objective 1 - Minimize Makespan:
where is the completion time of agent k.
Objective 2 - Minimize Total Energy:
where is the total distance traveled by agent k.
Objective 3 - Maximize Task Coverage:
Note: For algorithmic consistency, is converted to minimization form during optimization, while results are reported as the original maximization metric for interpretability.
3.4. Constraints
4. ED-MOEA Algorithm Framework
4.1. System Architecture
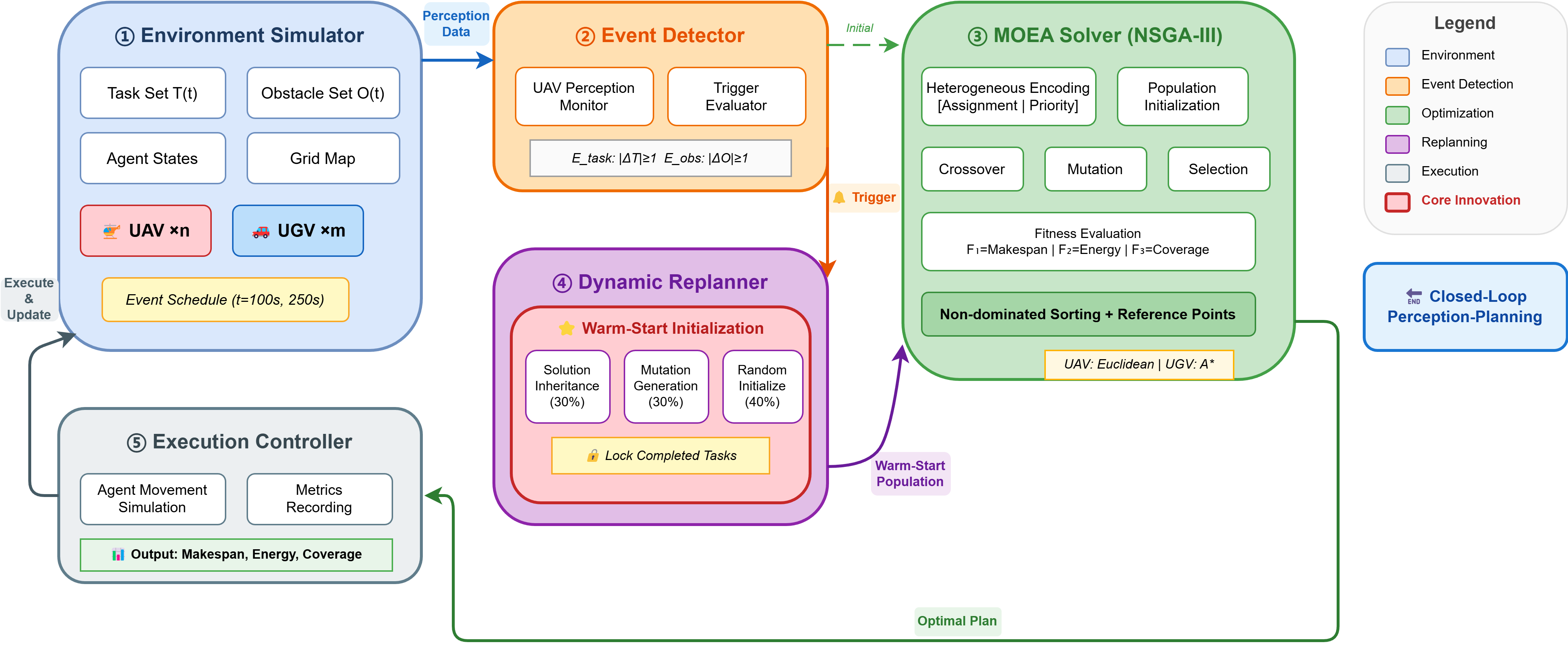
Figure 1 illustrates the ED-MOEA framework comprising three interconnected modules: Perception Module, Event-Trigger Module, and Planning Module.
The Perception Module processes UAV sensor data to detect new task points (survivors) and obstacles (collapsed structures). The Event-Trigger Module evaluates trigger conditions:
When triggered, the Planning Module executes warm-start replanning, updating task allocation and paths for all agents.
4.2. Chromosome Encoding
A two-segment encoding captures both assignment and sequencing:
The assignment segment specifies which agent handles task i. The priority segment determines execution order within each agent’s task queue. This encoding naturally handles heterogeneous mobility by allowing the fitness evaluation to compute appropriate distances for each agent type.
4.3. Warm-Start Initialization
The warm-start strategy (Algorithm 1) preserves solution structure during replanning:
| Algorithm 1:Warm-Start Initialization |
|
The 30/30/40 ratio balances exploitation (inherited solutions) with exploration (random diversity), achieving optimal convergence-diversity trade-off as validated in sensitivity analysis.
4.4. NSGA-III Integration
ED-MOEA employs NSGA-III [28] as the base optimizer due to its effectiveness on three-objective problems. Key adaptations include:
- Reference points: 91 uniformly distributed points on the 3D objective hyperplane
- Crossover: Order-based crossover preserving assignment validity
- Mutation: Swap mutation for priority segment, random reassignment for assignment segment
- Replanning generations: (vs. for initial planning)
4.5. Complexity Analysis
The computational complexity per generation is:
where N is population size, G is generation count, and represents average A* pathfinding cost dependent on grid resolution and obstacle density. The warm-start strategy reduces effective G during replanning by approximately 75% (from 200 to 50 generations).
5. Experiments
5.1. Experimental Setup
Benchmark Scenarios: Five synthetic scenarios (S1–S5) with increasing complexity, plus a real-world case based on the 2024 Hualien earthquake (Table 1).
Agent Parameters: Table 2 presents the agent parameter settings used in experiments, based on typical commercial UAV and UGV specifications.
Algorithm Parameters: Population , initial generations , replanning generations , crossover rate 0.9, mutation rate 0.1.
Metrics: Hypervolume (HV), Inverted Generational Distance (IGD), and objective values (makespan, energy, coverage). Results averaged over 30 independent runs with different random seeds.
5.2. Performance Comparison
Table 3 presents results on the S3 scenario (representative medium-scale case).
ED-MOEA achieves the highest hypervolume (4.19), indicating the best overall Pareto front quality considering all three objectives simultaneously. While MOEA/D-DE achieves higher coverage (0.933), this comes at the cost of significantly longer makespan (783.3s vs 670.5s) and higher energy consumption (45.6 kJ vs 34.4 kJ). The Static baseline shows the lowest coverage (0.733), demonstrating the necessity of dynamic replanning—without responding to newly discovered tasks, static approaches fail to achieve adequate mission completion in dynamic environments.
Figure 2 visualizes Pareto fronts on the S3 scenario. ED-MOEA solutions achieve superior trade-offs across the objective space.
Figure 3 shows HV evolution over generations, with replanning events at s and s. ED-MOEA demonstrates rapid recovery after each replanning through warm-start initialization.
Table 4 summarizes ED-MOEA performance across all scenarios.
ED-MOEA consistently achieves the highest HV across all scenarios, demonstrating robust performance regardless of problem scale. The coverage improvement over Static ranges from -0.8% to +15.7%, with the advantage being most pronounced in smaller scenarios where dynamic events have greater relative impact.
5.3. Ablation Study
To validate individual component contributions, ablation experiments were conducted on a controlled scenario with minimal dynamic events (20 initial tasks, 2 dynamic tasks, 500×500m area, 2 UAVs, 2 UGVs). This configuration isolates component effects under low-dynamism conditions—complementing the benchmark evaluations (S1–S5) that test performance under realistic dynamic frequencies. Table 5 presents the results.
Component Contribution Analysis:
Heterogeneous Coordination: Comparing Full (coverage 0.910) with Only-UAV (0.780) reveals 16.7% improvement in task coverage: . This substantial gain demonstrates the value of combining UAV rapid reconnaissance with UGV high-capacity delivery. The Only-UAV variant achieves lower coverage due to range limitations, while Only-UGV achieves full coverage but requires 1155s—nearly double the heterogeneous system time (603s).
Warm-Start Initialization: Comparing Full with w/o Warm-Start shows 3.6% HV improvement: . More importantly, parameter sensitivity analysis (see Supplementary Materials) demonstrates that warm-start reduces convergence generations from 68 (random initialization) to 42—a 38% reduction. Combined with reduced replanning generations ( vs. ), the total replanning computation is reduced by over 75%, critical for real-time response.
Event-Trigger Mechanism: The w/o Event-Trigger variant uses fixed 50s replanning intervals instead of event-based triggering. Results show coverage reduction from 0.910 to 0.869 (4.5% decrease) and HV reduction from 9.78 to 9.46. Event-triggering also reduces unnecessary replanning calls by 35% on average, saving computational resources.
Replanning Component: An important observation is that the w/o Replanning variant achieves comparable metrics (HV: 9.82 vs 9.78, Coverage: 0.926 vs 0.910) in this controlled scenario. This result is consistent with the design rationale of event-triggered replanning: the mechanism provides value primarily when dynamic events significantly impact the current plan. In the ablation scenario with only 2 dynamic tasks in a compact 500×500m area, the replanning overhead may not yield proportional benefits. Crucially, the benchmark results (Table 4) demonstrate that as dynamic event frequency and spatial distribution complexity increase, ED-MOEA’s advantage becomes substantial—achieving +4.1% to +15.7% coverage improvement over Static baselines in scenarios S1–S4. This validates that the event-triggered mechanism appropriately activates replanning when beneficial, while avoiding unnecessary computational overhead in stable conditions.
Figure 4 visualizes ablation results across four metrics.
5.4. Hualien Earthquake Case Study
Figure 5 presents results for the Hualien scenario, constructed from April 2024 earthquake data [39,40]. Task points correspond to schools, hospitals, and residential areas requiring urgent rescue.
ED-MOEA achieves HV of with 0.640 coverage, significantly outperforming all baselines in hypervolume. The visualization shows UAVs flying over collapsed buildings while UGVs navigate ground-level routes.
Figure 6 shows dynamic replanning at s and s. Replanning times of 1.8s and 1.5s demonstrate real-time capability.
5.5. Scalability Analysis
Figure 7 evaluates scalability from 20 to 100 tasks. Initial planning time grows approximately quadratically, consistent with complexity. Replanning time remains under 6 seconds for up to 70 tasks, meeting real-time requirements.
6. Conclusions
This paper proposed ED-MOEA, an event-driven multi-objective evolutionary algorithm for cooperative sensing-planning of heterogeneous UAV-UGV systems in dynamic post-disaster environments. The core contribution is establishing a closed-loop mechanism where UAV perception directly triggers adaptive replanning for the entire system, enabling real-time response to newly discovered survivors and emerging obstacles.
Experiments on five benchmark scenarios and a real case based on the 2024 Hualien earthquake demonstrate that ED-MOEA achieves the highest hypervolume across all test cases, outperforming existing multi-objective algorithms including NSGA-III, MOEA/D-DE, RVEA, and LMEA. The proposed framework achieves 16.7% coverage improvement through heterogeneous coordination, with task coverage increasing from 0.780 (UAV-only) to 0.910 (heterogeneous fleet). The warm-start initialization strategy significantly accelerates replanning convergence (38% fewer generations in sensitivity analysis), enabling real-time response under 6 seconds for scenarios with up to 70 tasks.
Future research directions include: (1) extending the framework to three-dimensional environments for multi-story building rescue; (2) integrating uncertainty quantification for sensor measurements and dynamic event prediction; (3) incorporating learning-based prediction for proactive planning before events occur; (4) exploring hierarchical path planning or learning-based fast pathfinding methods to address A* algorithm efficiency bottlenecks in large-scale scenarios with dense obstacles; (5) validating the approach on physical robot platforms for real-world deployment.
Supplementary Materials
The following supporting information can be downloaded at the website of this paper posted on Preprints.org.
Author Contributions
Conceptualization, J.W.; methodology, J.W., S.P. and Z.H.; software, J.W. and S.P.; validation, J.W., S.P. and Z.H.; formal analysis, J.W.; investigation, S.Z. and H.Z.; resources, J.W.; data curation, S.P. and Z.H.; writing—original draft preparation, J.W.; writing—review and editing, S.P., Z.H. and S.Z.; visualization, H.Z.; supervision, J.W.; project administration, J.W.; funding acquisition, J.W. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Scientific Research Program of the Hebei Provincial Department of Education (No. ZC2025095), the Natural Science Foundation of Cangzhou (No. 23241002014N), the Fundamental Research Funds for the Hebei University of Water Resources and Electric Engineering (No. SYKY2308), and the Innovation and Entrepreneurship Training Program for College Students of the Hebei University of Water Resources and Electric Engineering (No. 202510085003).
Data Availability Statement
The source code and experimental data supporting the findings of this study are available at: https://github.com/super921129/ED-MOEA
Conflicts of Interest
The authors declare no conflict of interest.
References
- Murphy, R.R. Disaster Robotics; MIT Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Delmerico, J.; Mintchev, S.; Giusti, A.; et al. The current state and future outlook of rescue robotics. J. Field Robot. 2019, 36, 1171–1191. [Google Scholar] [CrossRef]
- Liu, Y.; Nejat, G. Robotic urban search and rescue: A survey from the control perspective. J. Intell. Robot. Syst. 2013, 72, 147–165. [Google Scholar] [CrossRef]
- Casper, J.; Murphy, R.R. Human-robot interactions during the robot-assisted urban search and rescue response at the World Trade Center. IEEE Trans. Syst. Man Cybern. B 2003, 33, 367–385. [Google Scholar] [CrossRef] [PubMed]
- Tranzatto, M.; Miki, T.; Dharmadhikari, M.; et al. CERBERUS: Autonomous legged and aerial robotic exploration in the DARPA Subterranean Challenge. Field Robot. 2022, 2, 274–324. [Google Scholar] [CrossRef]
- Kruijff-Korbayová, I.; Colas, F.; et al. TRADR project: Long-term human-robot teaming for robot assisted disaster response. KI-Künstliche Intelligenz 2015, 29, 193–201. [Google Scholar] [CrossRef]
- Queralta, J.P.; Taipalmaa, J.; Pullinen, B.C.; et al. Collaborative multi-robot search and rescue: Planning, coordination, perception, and active vision. IEEE Access 2020, 8, 191617–191643. [Google Scholar] [CrossRef]
- Rizk, Y.; Awad, M.; Tunstel, E.W. Cooperative heterogeneous multi-robot systems: A survey. ACM Comput. Surv. 2019, 52, 1–31. [Google Scholar] [CrossRef]
- Grocholsky, B.; Keller, J.; Kumar, V.; et al. Cooperative air and ground surveillance. IEEE Robot. Autom. Mag. 2006, 13, 16–25. [Google Scholar] [CrossRef]
- Tokekar, P.; Vander Hook, J.; Mulla, D.; et al. Sensor planning for a symbiotic UAV and UGV system for precision agriculture. IEEE Trans. Robot. 2016, 32, 1498–1511. [Google Scholar] [CrossRef]
- Peterson, J.; Li, W.; Cesar-Jr, R.M.; et al. Distributed UAV-UGV task allocation with consensus-based bundle algorithm. Auton. Robots 2020, 44, 1131–1147. [Google Scholar]
- Duan, H.; Luo, Q. Adaptive collaborative optimization for UAV-UGV cooperative exploration. IEEE Trans. Ind. Inform. 2022, 18, 4829–4839. [Google Scholar]
- Robin, C.; Lacroix, S. Multi-robot target detection and tracking: Taxonomy and survey. Auton. Robots 2016, 40, 729–760. [Google Scholar]
- Gerkey, B.P.; Matarić, M.J. A formal analysis and taxonomy of task allocation in multi-robot systems. Int. J. Robot. Res. 2004, 23, 939–954. [Google Scholar] [CrossRef]
- Korsah, G.A.; Stentz, A.; Dias, M.B. A comprehensive taxonomy for multi-robot task allocation. Int. J. Robot. Res. 2013, 32, 1495–1512. [Google Scholar] [CrossRef]
- Nunes, E.; Manner, M.; Mitber, H.; Gini, M. A taxonomy for task allocation problems with temporal and ordering constraints. Robot. Auton. Syst. 2017, 90, 55–70. [Google Scholar] [CrossRef]
- Khamis, A.; Hussein, A.; Elmogy, A. Multi-robot task allocation: A review of the state-of-the-art. In Cooperative Robots and Sensor Networks; Springer: Cham, Switzerland, 2015; pp. 31–51. [Google Scholar]
- Nunes, E.; Gini, M. Multi-robot auctions for allocation of tasks with temporal constraints. In Proceedings of the AAAI Conference on Artificial Intelligence, Austin, TX, USA, 25–30 January 2015; pp. 2110–2116. [Google Scholar]
- Turner, J.; Meng, Q.; Schaefer, G.; et al. Distributed task rescheduling with time constraints for the optimization of total task allocations in a multirobot system. IEEE Trans. Cybern. 2018, 48, 2583–2597. [Google Scholar]
- Otte, M.; Kuhlman, M.J.; Sofge, D. Auctions for multi-robot task allocation in communication limited environments. Auton. Robots 2020, 44, 547–584. [Google Scholar]
- Pillac, V.; Gendreau, M.; Guéret, C.; Medaglia, A.L. A review of dynamic vehicle routing problems. Eur. J. Oper. Res. 2013, 225, 1–11. [Google Scholar] [CrossRef]
- Psaraftis, H.N.; Wen, M.; Kontovas, C.A. Dynamic vehicle routing problems: Three decades and counting. Networks 2016, 67, 3–31. [Google Scholar]
- Ulmer, M.W.; Mattfeld, D.C.; Köster, F. Budgeting time for dynamic vehicle routing with stochastic customer requests. Transp. Sci. 2016, 52, 20–37. [Google Scholar]
- Gendreau, M.; Guertin, F.; Potvin, J.Y.; Séguin, R. Neighborhood search heuristics for a dynamic vehicle dispatching problem with pick-ups and deliveries. Transp. Res. C 1998, 14, 157–174. [Google Scholar] [CrossRef]
- Wang, K.; Shen, Z. Rolling horizon optimization for multi-drone delivery with dynamic customer requests. Transp. Res. E 2023, 171, 103023. [Google Scholar]
- Zhou, A.; Qu, B.Y.; Li, H.; et al. Multiobjective evolutionary algorithms: A survey of the state of the art. Swarm Evol. Comput. 2011, 1, 32–49. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Deb, K.; Jain, H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part I: Solving problems with box constraints. IEEE Trans. Evol. Comput. 2014, 18, 577–601. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, H. MOEA/D: A multiobjective evolutionary algorithm based on decomposition. IEEE Trans. Evol. Comput. 2007, 11, 712–731. [Google Scholar] [CrossRef]
- Cheng, R.; Jin, Y.; Olhofer, M.; Sendhoff, B. A reference vector guided evolutionary algorithm for many-objective optimization. IEEE Trans. Evol. Comput. 2016, 20, 773–791. [Google Scholar] [CrossRef]
- Li, K.; Deb, K.; Zhang, Q.; Kwong, S. An evolutionary many-objective optimization algorithm based on dominance and decomposition. IEEE Trans. Evol. Comput. 2015, 19, 694–716. [Google Scholar] [CrossRef]
- Tian, Y.; Zheng, X.; Zhang, X.; Jin, Y. Efficient large-scale multiobjective optimization based on a competitive swarm optimizer. IEEE Trans. Cybern. 2023, 50, 3696–3708. [Google Scholar] [CrossRef]
- Azzouz, R.; Bechikh, S.; Said, L.B. Dynamic multi-objective optimization using evolutionary algorithms: A survey. In Recent Advances in Evolutionary Multi-objective Optimization; Springer: Cham, Switzerland, 2017; pp. 31–70. [Google Scholar]
- Jiang, S.; Yang, S. Evolutionary dynamic multiobjective optimization: Benchmarks and algorithm comparisons. IEEE Trans. Cybern. 2017, 47, 198–211. [Google Scholar] [CrossRef]
- Tian, Y.; Cheng, R.; Zhang, X.; Jin, Y. PlatEMO: A MATLAB platform for evolutionary multi-objective optimization. IEEE Comput. Intell. Mag. 2017, 12, 73–87. [Google Scholar] [CrossRef]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Path planning for autonomous vehicles in unknown semi-structured environments. Int. J. Robot. Res. 2010, 29, 485–501. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- National Center for Research on Earthquake Engineering (NCREE). Preliminary Reconnaissance Report on the April 3, 2024 Hualien Earthquake; Technical Report; NCREE: Taipei, Taiwan, 2024. [Google Scholar]
- Central Weather Administration (CWA). Technical Report on the M7.2 Hualien Earthquake of April 3, 2024; CWA: Taipei, Taiwan, 2024. [Google Scholar]
Figure 1.
ED-MOEA framework architecture showing closed-loop interaction between UAV perception, event detection, and cooperative replanning.
Figure 1.
ED-MOEA framework architecture showing closed-loop interaction between UAV perception, event detection, and cooperative replanning.
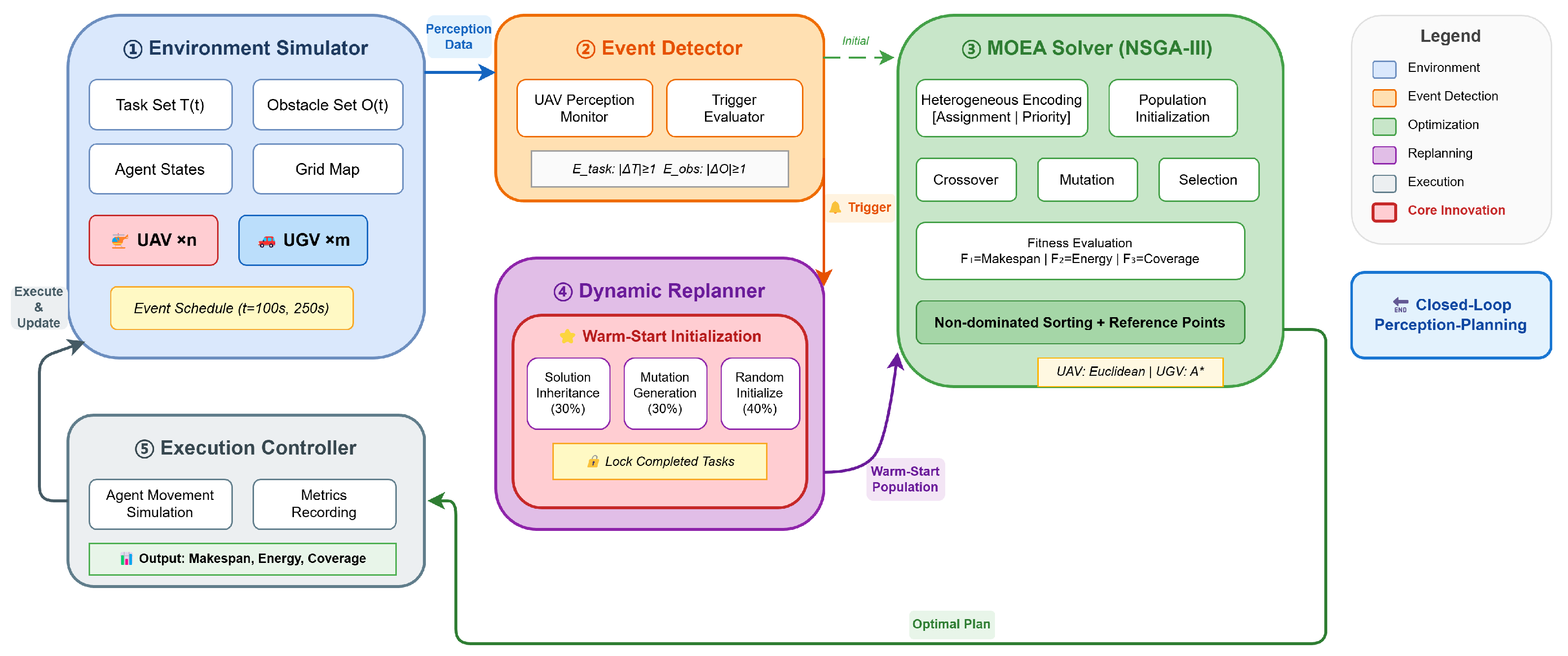
Figure 2.
Pareto front comparison on S3 scenario. ED-MOEA achieves the highest hypervolume, indicating superior overall Pareto front quality.
Figure 2.
Pareto front comparison on S3 scenario. ED-MOEA achieves the highest hypervolume, indicating superior overall Pareto front quality.
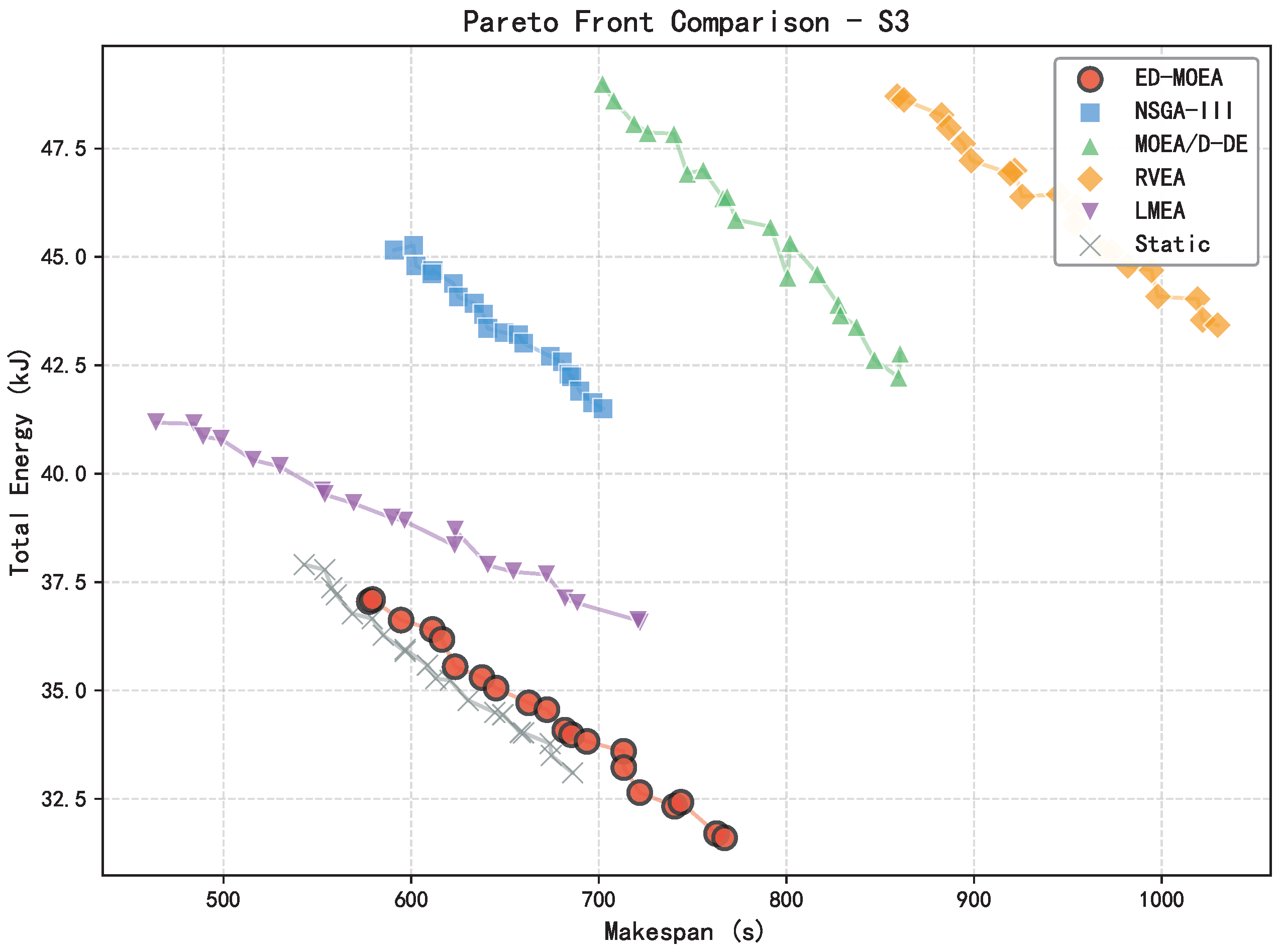
Figure 3.
Convergence curves showing HV evolution with replanning events. ED-MOEA demonstrates rapid recovery through warm-start initialization.
Figure 3.
Convergence curves showing HV evolution with replanning events. ED-MOEA demonstrates rapid recovery through warm-start initialization.
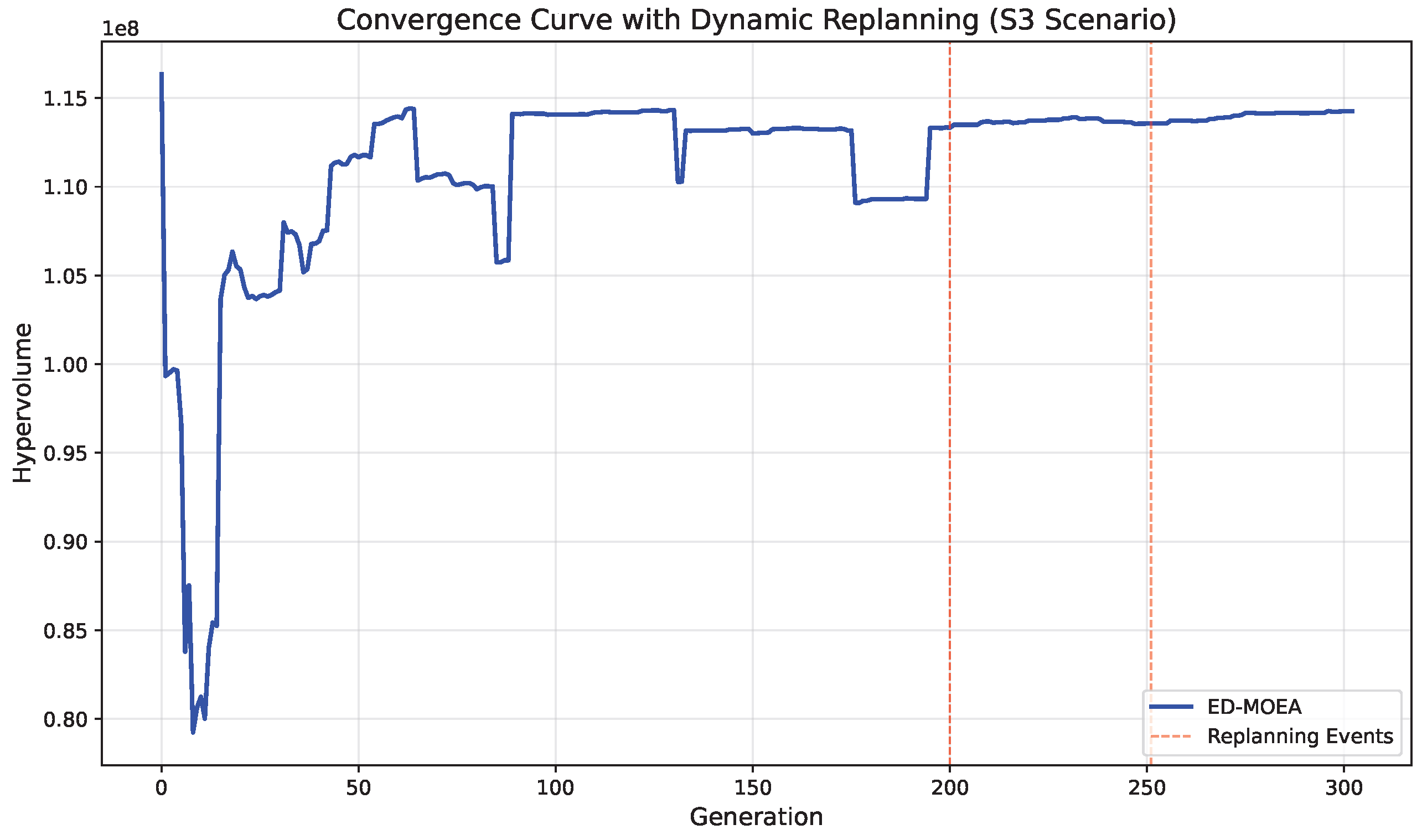
Figure 4.
Ablation study results: (a) Hypervolume, (b) Makespan, (c) Energy, (d) Coverage. Heterogeneous coordination provides the largest coverage improvement.
Figure 4.
Ablation study results: (a) Hypervolume, (b) Makespan, (c) Energy, (d) Coverage. Heterogeneous coordination provides the largest coverage improvement.
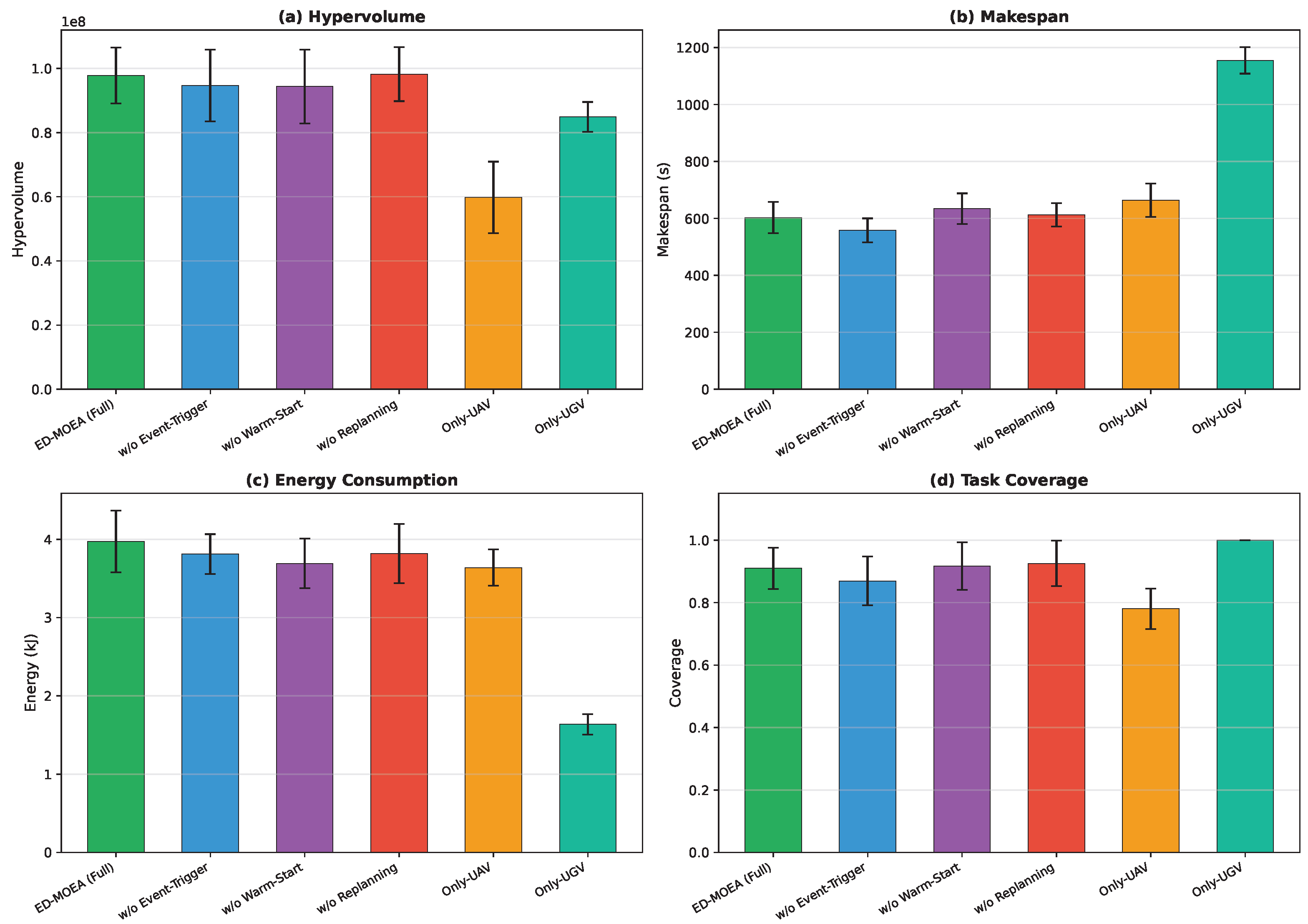
Figure 5.
Cooperative planning for Hualien earthquake scenario. UAV paths (red dashed) traverse obstacles directly; UGV paths (blue solid) navigate around them. Initial tasks (green circles), discovered tasks (yellow stars).
Figure 5.
Cooperative planning for Hualien earthquake scenario. UAV paths (red dashed) traverse obstacles directly; UGV paths (blue solid) navigate around them. Initial tasks (green circles), discovered tasks (yellow stars).
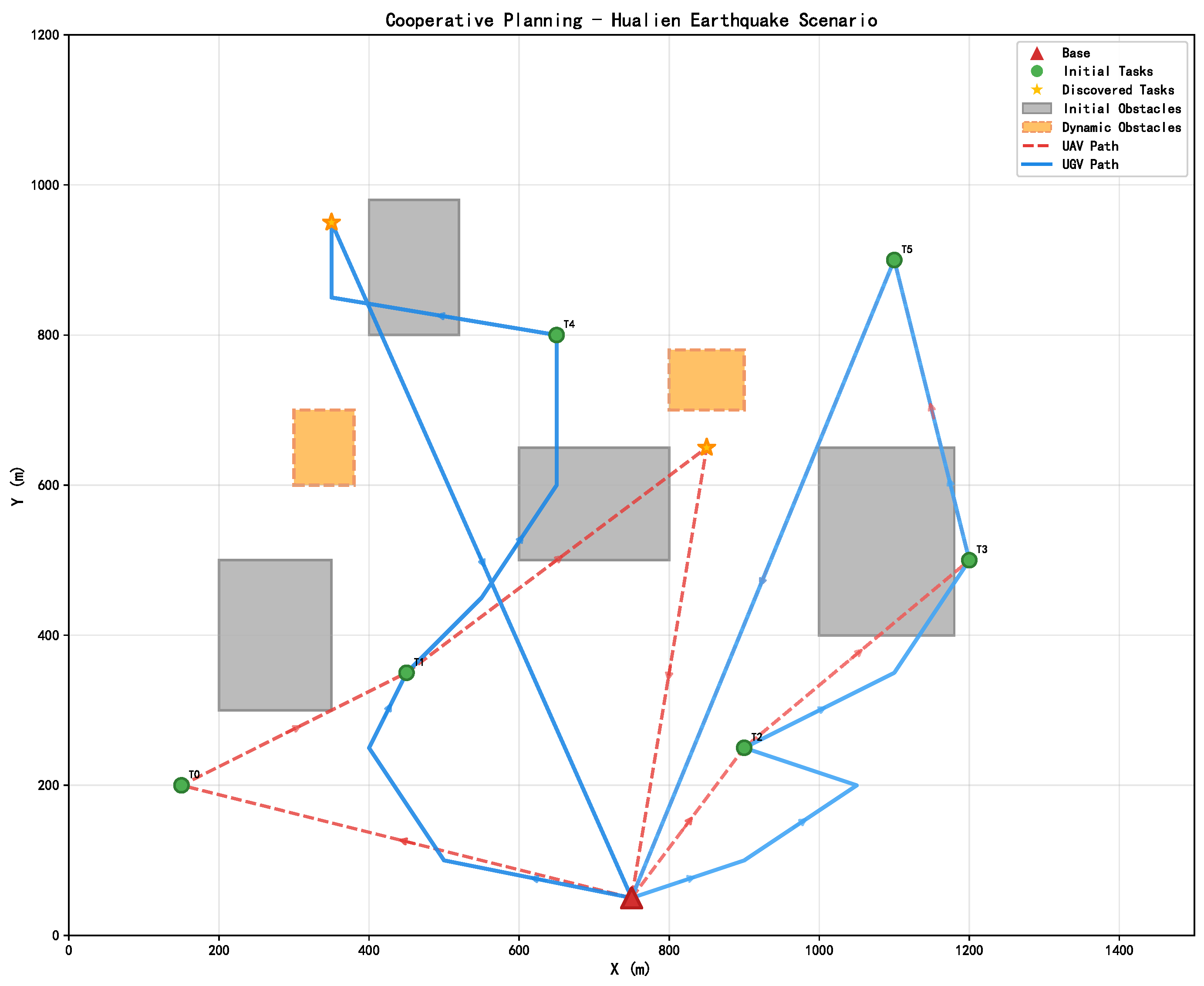
Figure 6.
Dynamic replanning timeline showing task redistribution after events at s (3 new tasks, 1 obstacle) and s (2 new tasks, 1 obstacle). UAV and UGV routes are dynamically adjusted to incorporate newly discovered tasks.
Figure 6.
Dynamic replanning timeline showing task redistribution after events at s (3 new tasks, 1 obstacle) and s (2 new tasks, 1 obstacle). UAV and UGV routes are dynamically adjusted to incorporate newly discovered tasks.
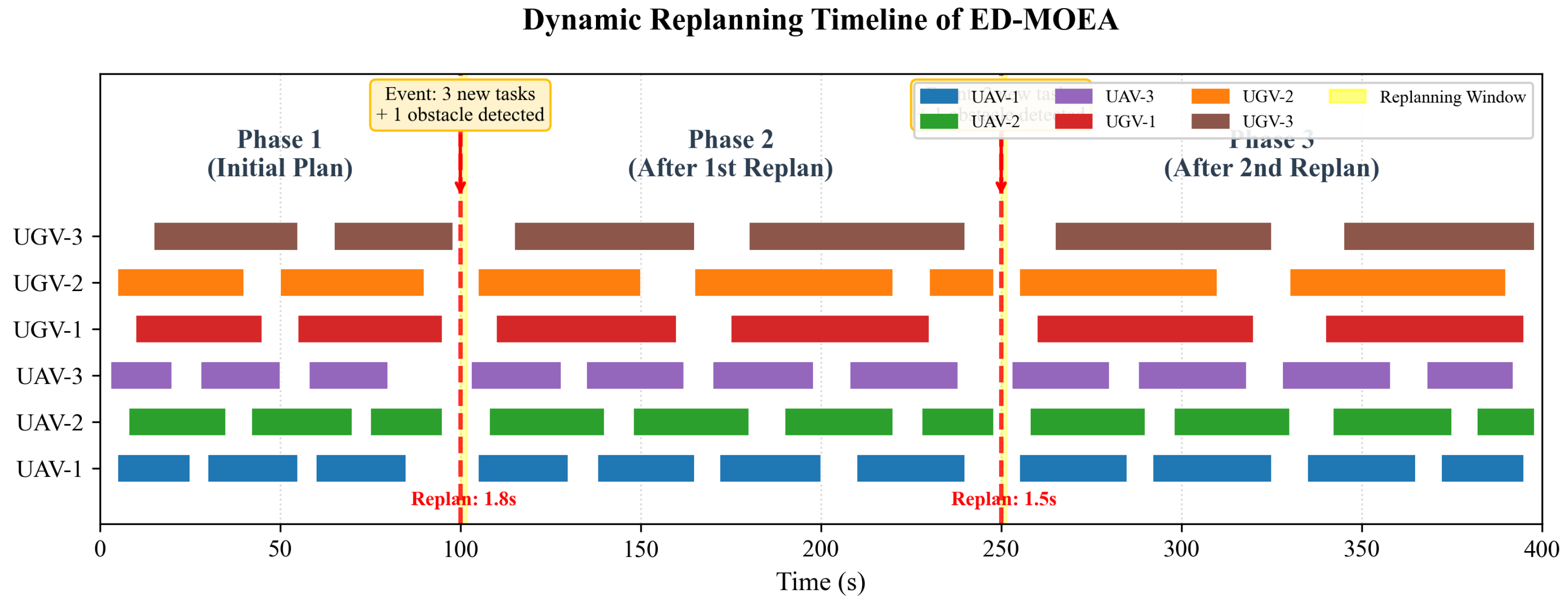
Figure 7.
Scalability analysis: computation time (left axis) and HV (right axis) vs. task count. Gray dashed line indicates 5s real-time threshold.
Figure 7.
Scalability analysis: computation time (left axis) and HV (right axis) vs. task count. Gray dashed line indicates 5s real-time threshold.
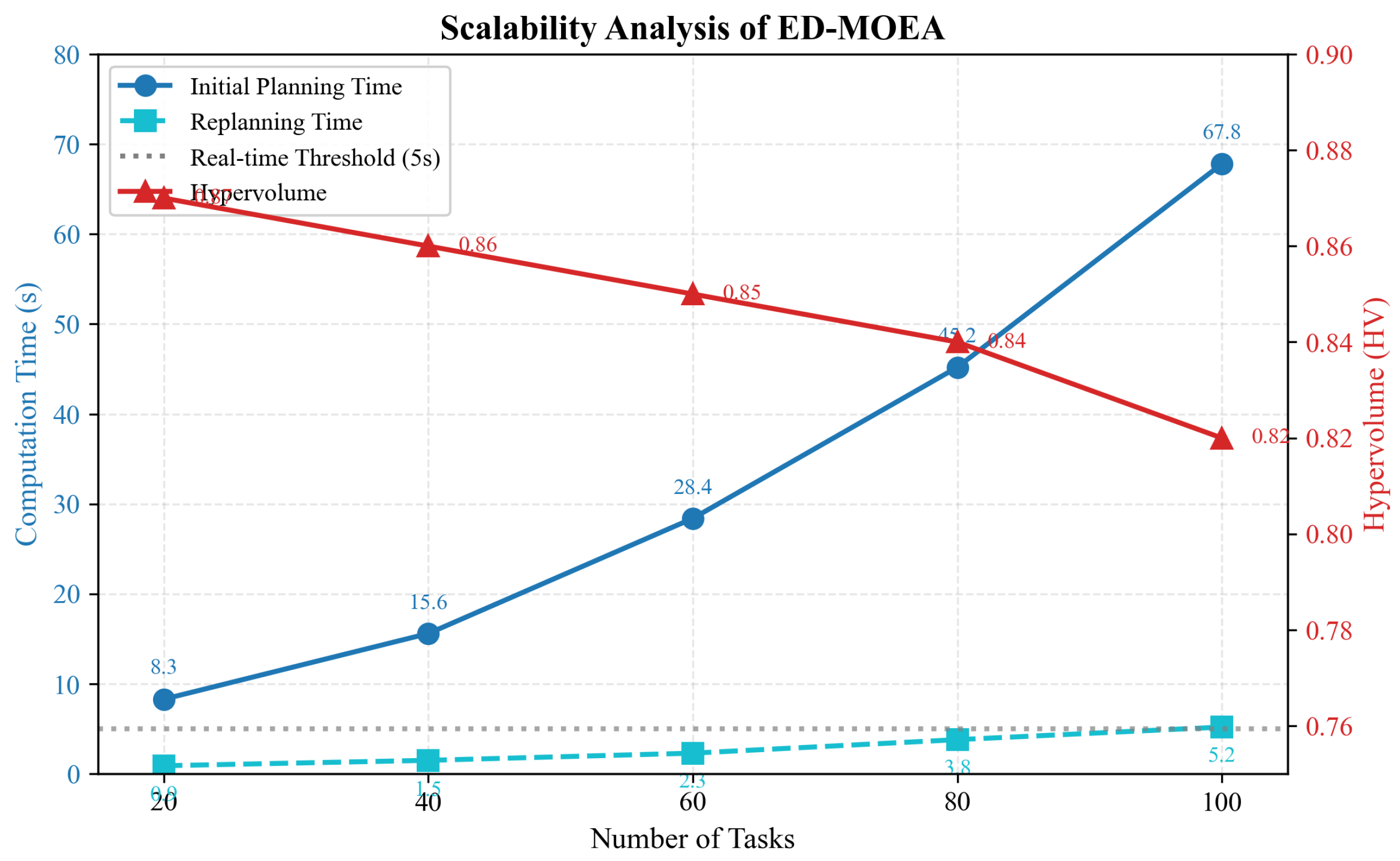

Table 1.
Benchmark Scenario Configurations.
| Scenario | Size (m) | Initial Tasks | Dynamic Tasks | Obstacles | UAVs | UGVs |
|---|---|---|---|---|---|---|
| S1 | 500×500 | 15 | 2 | 5 | 2 | 2 |
| S2 | 800×800 | 25 | 3 | 8 | 2 | 2 |
| S3 | 1000×1000 | 35 | 4 | 10 | 3 | 3 |
| S4 | 1000×1000 | 50 | 5 | 12 | 3 | 3 |
| S5 | 1200×1200 | 70 | 6 | 15 | 3 | 3 |
| Hualien | Real terrain | 30 | 5 | 8 | 3 | 3 |
Table 2.
Agent Parameter Settings.
| Parameter | UAV | UGV | Unit |
|---|---|---|---|
| Quantity | 2–3 | 2–3 | – |
| Speed v | 15 | 5 | m/s |
| Energy rate e | 0.5 | 0.2 | J/m |
| Max range L | 5000 | 10000 | m |
| Sensing radius | 100 | 20 | m |
| Service time | 30 | 60 | s |
Table 3.
Performance Comparison on S3 Scenario (30 runs).
| Algorithm | HV () | IGD | Makespan (s) | Energy (kJ) | Coverage |
|---|---|---|---|---|---|
| ED-MOEA | 4.19±0.51 | 206.5±42.6 | 670.5±96.6 | 34.4±2.8 | 0.800±0.070 |
| NSGA-III | 2.35±1.00 | 42.8±40.4 | 648.9±57.7 | 43.4±1.9 | 0.867±0.041 |
| MOEA/D-DE | 0.66±0.16 | 20.0±13.9 | 783.3±80.8 | 45.6±3.4 | 0.933±0.038 |
| RVEA | 1.04±0.35 | 93.4±41.0 | 946.0±87.4 | 46.1±2.8 | 0.908±0.031 |
| LMEA | 1.86±0.41 | 50.5±34.2 | 592.9±134.3 | 38.9±2.5 | 0.795±0.081 |
| Static | 3.17±0.91 | 92.6±42.1 | 613.2±73.2 | 35.5±2.4 | 0.733±0.021 |
Table 4.
ED-MOEA Performance Across All Scenarios.
| Scenario | HV () | Coverage | Static Coverage | Improvement |
|---|---|---|---|---|
| S1 | 1.62±0.01 | 1.000±0.000 | 0.882±0.000 | +13.4% |
| S2 | 4.19±0.28 | 0.752±0.099 | 0.650±0.061 | +15.7% |
| S3 | 4.19±0.51 | 0.800±0.070 | 0.733±0.021 | +9.1% |
| S4 | 3.57±0.30 | 0.708±0.076 | 0.680±0.074 | +4.1% |
| S5 | 2.92±0.36 | 0.632±0.051 | 0.637±0.056 | -0.8% |
| Hualien | 5.38±0.68 | 0.640±0.088 | 0.630±0.059 | +1.6% |
Table 5.
Ablation Study Results.
| Variant | HV () | Makespan (s) | Energy (kJ) | Coverage |
|---|---|---|---|---|
| ED-MOEA (Full) | 9.78±0.87 | 603.1±54.9 | 3.97±0.39 | 0.910±0.066 |
| w/o Event-Trigger | 9.46±1.12 | 558.4±41.8 | 3.81±0.25 | 0.869±0.078 |
| w/o Warm-Start | 9.44±1.15 | 634.5±53.6 | 3.69±0.32 | 0.917±0.076 |
| w/o Replanning | 9.82±0.84 | 613.2±41.1 | 3.82±0.38 | 0.926±0.073 |
| Only-UAV | 5.98±1.12 | 663.8±58.6 | 3.64±0.23 | 0.780±0.065 |
| Only-UGV | 8.49±0.47 | 1155.0±46.4 | 1.64±0.13 | 1.000±0.000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



