
Submitted:
14 October 2025
Posted:
14 October 2025
You are already at the latest version
Abstract
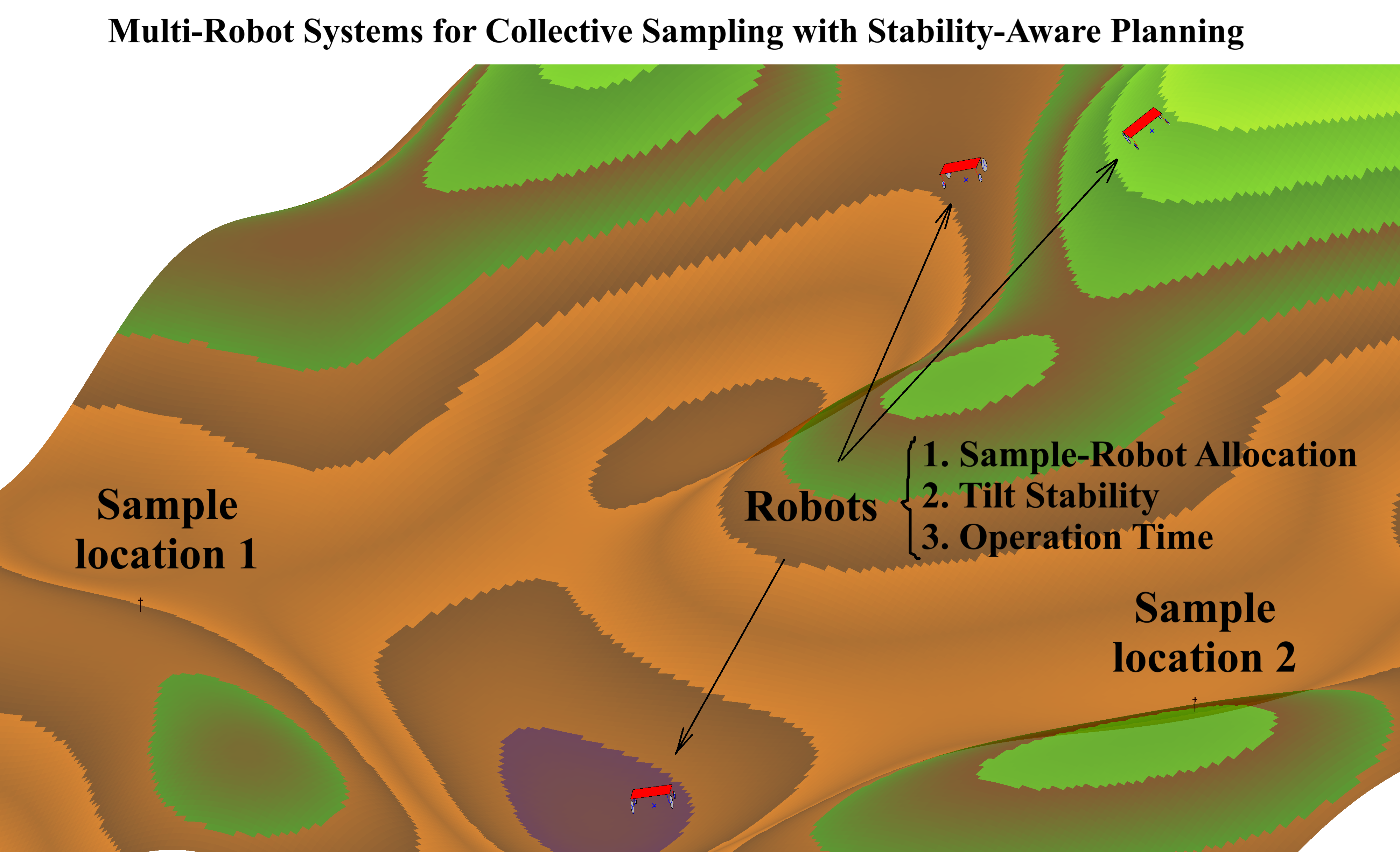
Field sampling is a critical task in applications such as environmental monitoring and precision agriculture. Efficiently completing these tasks while maintaining robots' tilt stability is particularly challenging when multiple robots are deployed. In this work, we explore how employing multiple robots can reduce operation time and wandering distances during sampling missions. The sample locations are assumed to follow a Gaussian distribution, providing a foundation for planning and evaluation. Robot instability is quantified using the bias angle, representing the front-facing tilt relative to the horizon, while operational efficiency is measured by the total distance traveled to interim targets and sample targets. A cost function, defined as a weighted sum of these metrics, balances stability and distance efficiency. Through extensive simulations, we demonstrate that increasing the number of robots significantly decreases operation time and improves the tilt stability defined by the cost function. These results offer valuable insights into designing multi-robot systems for efficient and stable field sampling.
Keywords:
multi-robot system
; random sampling
; Gaussian distribution
; tilt stability
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



