Submitted:
12 October 2025
Posted:
15 October 2025
You are already at the latest version
Abstract
Structure detection(SD) has emerged as a critical technology for ensuring the safety and longevity of infrastructure, particularly in housing and civil engineering. Traditional SD methods often rely on manual inspections, which are time-consuming, labor-intensive, and prone to human error, especially in complex environments such as dense urban settings or aging buildings with deteriorated materials. Recent advances in autonomous systems—such as Unmanned Aerial Vehicles (UAVs) and climbing robots—have shown promise in addressing these limitations by enabling efficient, real-time data collection. However, challenges persist in accurately detecting and analyzing structural defects (e.g., masonry cracks, concrete spalling) amidst cluttered backgrounds, hardware constraints, and the need for multi-scale feature integration . The integration of machine learning (ML) and deep learning (DL) has revolutionized SD by enabling automated feature extraction and robust defect recognition. For instance, RepConv architectures have been widely adopted for multi-scale object detection, while attention mechanisms like TAM (Technology Acceptance Model) have improved spatial feature fusion in complex scenes. Nevertheless, existing works often focus on singular sensing modalities (e.g., UAVs alone) or neglect the fusion of complementary data streams (e.g., ground-based robot imagery) to enhance detection accuracy. Furthermore, computational redundancy in multi-scale processing and inconsistent bounding box regression in detection frameworks remain underexplored. This study addresses these gaps by proposing a generalized safety inspection system that synergizes UAV and stair-climbing robot data. We introduce a novel multi-scale targeted feature extraction path (Rep-FasterNet TAM block) to unify automated RepConv-based feature refinement with dynamic scale fusion, reducing computational overhead while preserving critical structural details. For detection, we combine traditional methods with remote sensor fusion to mitigate feature loss during image upsampling/downsampling, supported by a structural model GIOU [Mathematical Definition:GIOU=IOU-(C-U)/C] that enhances bounding box regression through shape/scale-aware constraints and real-time analysis. By siting our work within the context of recent reviews on ML/DL for SD, we demonstrate how our hybrid approach bridges the gap between autonomous inspection hardware and AI-driven defect analysis, offering a scalable solution for large-scale housing safety assessments. In response to challenges in detecting objects accurately during housing safety assessments—including large/dense objects, complex backgrounds, and hardware limitations—we propose a generalized inspection system leveraging data from UAVs and stair-climbing robots. To address multi-scale feature extraction inefficiencies, we design a Rep-FasterNet TAM block that integrates RepConv for automated feature refinement and a multi-scale attention module to enhance spatial feature consistency. For detection, we combine dynamic scale remote feature fusion with traditional methods, supported by a structural GIOU model that improves bounding box regression through shape/scale constraints and real-time analysis. Experiments demonstrate that our system increases masonry/concrete assessment accuracy by 11.6% and 20.9%, respectively, while reducing manual drawing restoration workload by 16.54%. This validates the effectiveness of our hybrid approach in unifying autonomous inspection hardware with AI-driven analysis, offering a scalable solution for SD in housing infrastructure.
Keywords:
1. Improving Identification Technology Through Integrating Footage from an Unmanned Aerial Vehicle and Stair-Climbing Robot
1.1. DasViewer Model
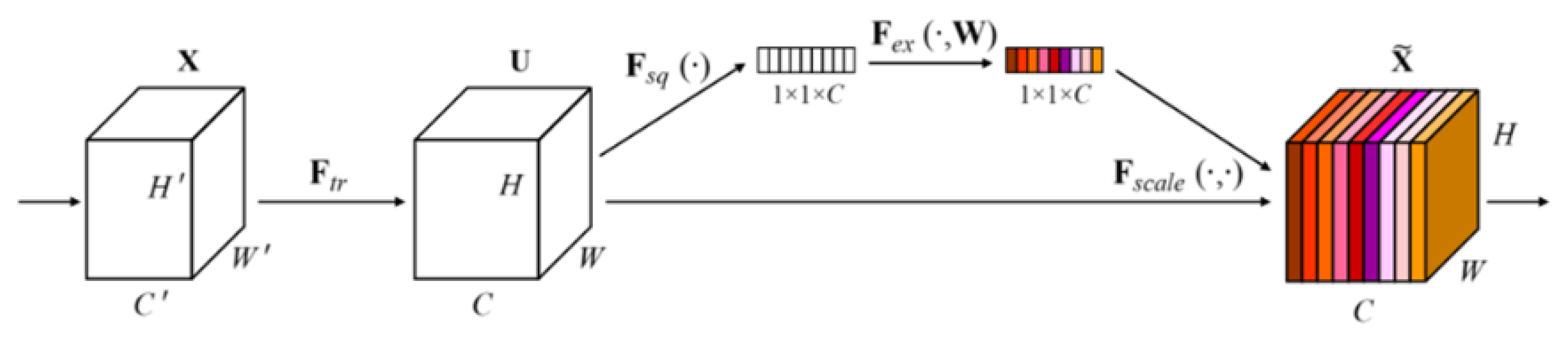
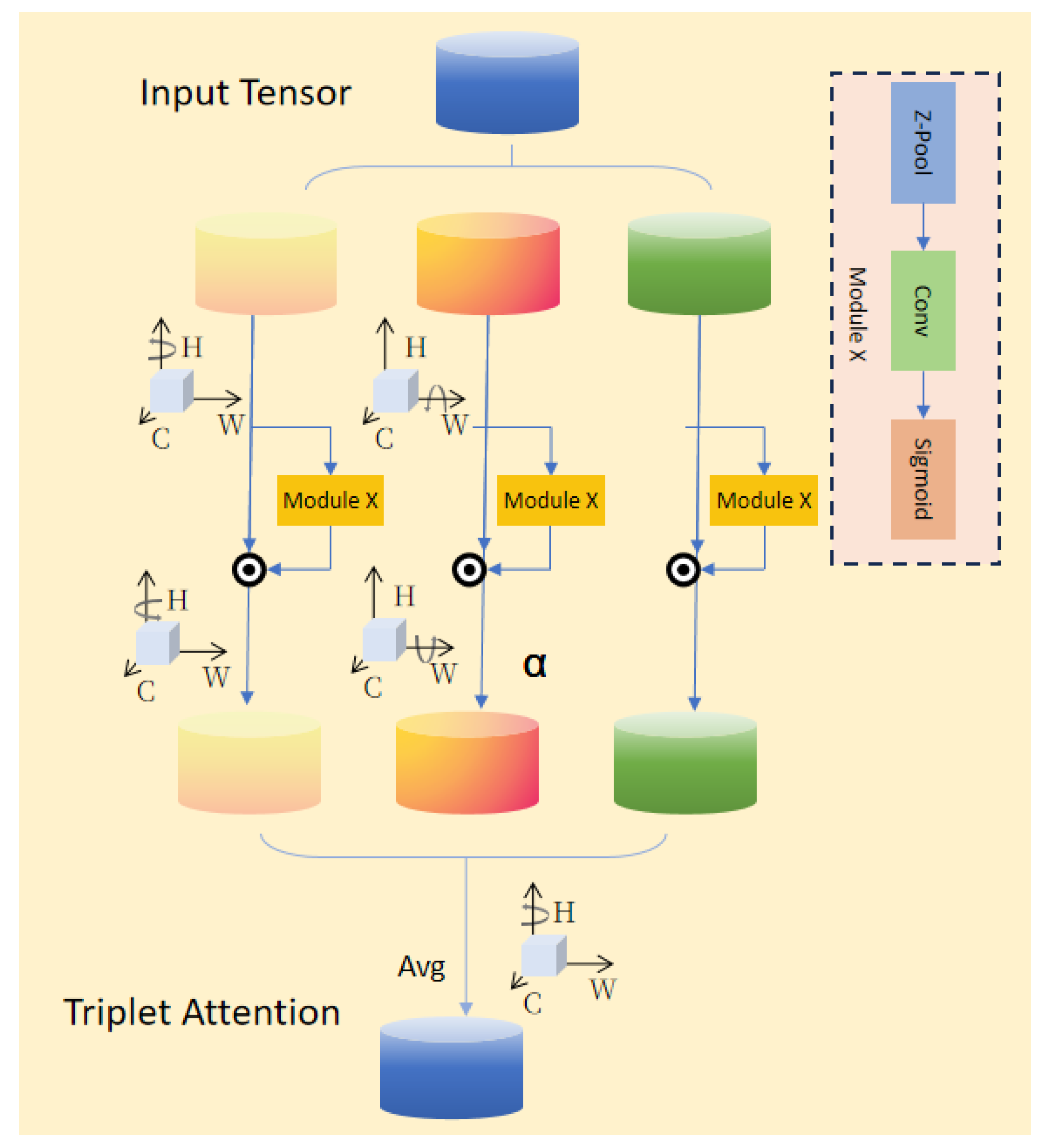
1.2. Technology Acceptance Model (TAM) Attention Mechanism
1.3. Identification Parameters
1.3.1. Parameter: Preliminary Inspection of Current Structural Condition [7,8,9]
1.3.2. Parameter: Structural Material Strength Testing [10,11]
1.3.3. Parameter: Component Cross-Sectional Size Inspection [12,13,14,15,16,17,18]
1.3.4. Parameter: Inspection of Reinforcement Configuration [19]
1.3.5. Parameter: Appearance Quality Inspection [20,21,22]
1.3.6. Parameter: Calculation of Structural Seismic Bearing Capacity [21]
2. Evaluation Indicators
3. Comparative Analysis of Results
3.1. Comparison and Analysis of Experimental Results
3.1.1. Comparison Between Image Collection Modeling and Modeling After Manual Image Collection
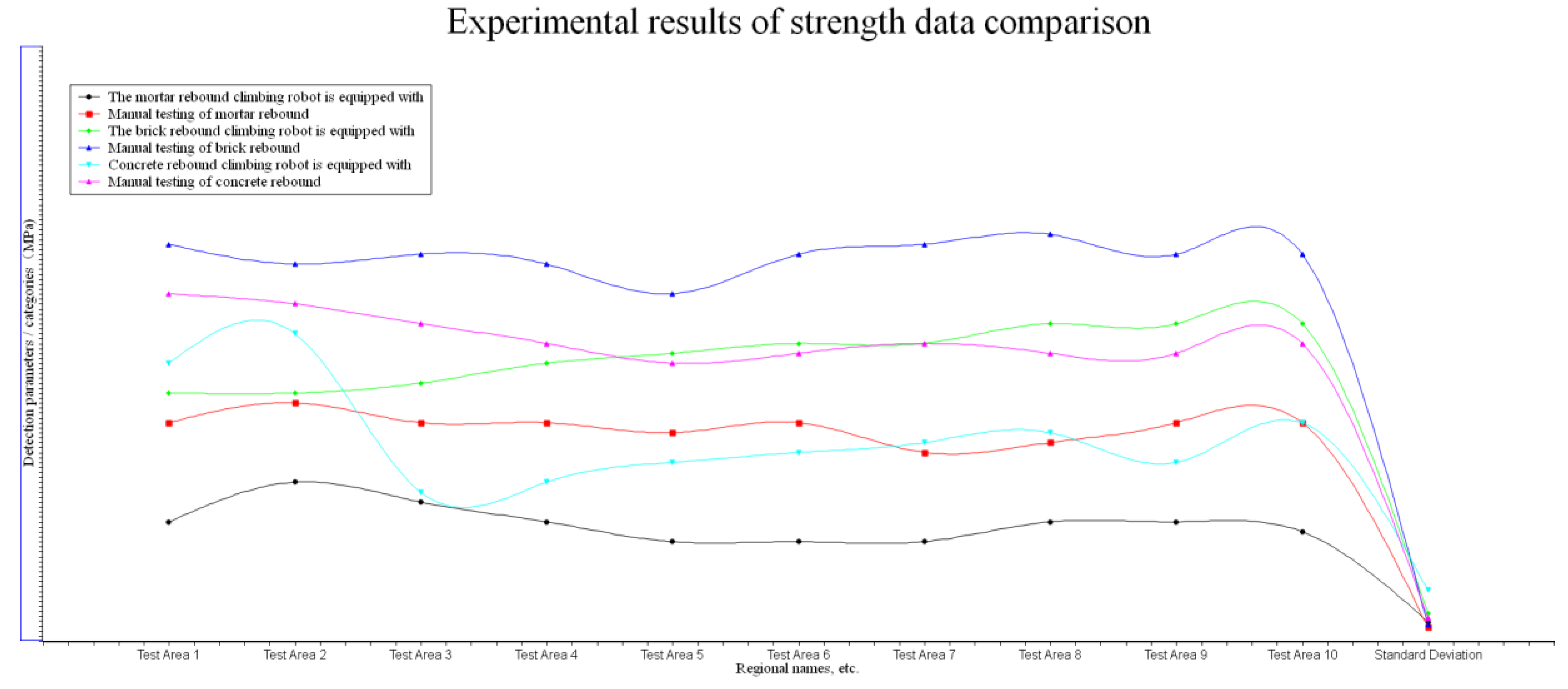
3.1.2. Comparison Between Strength Data Collection and Manual Collection of Strength Data
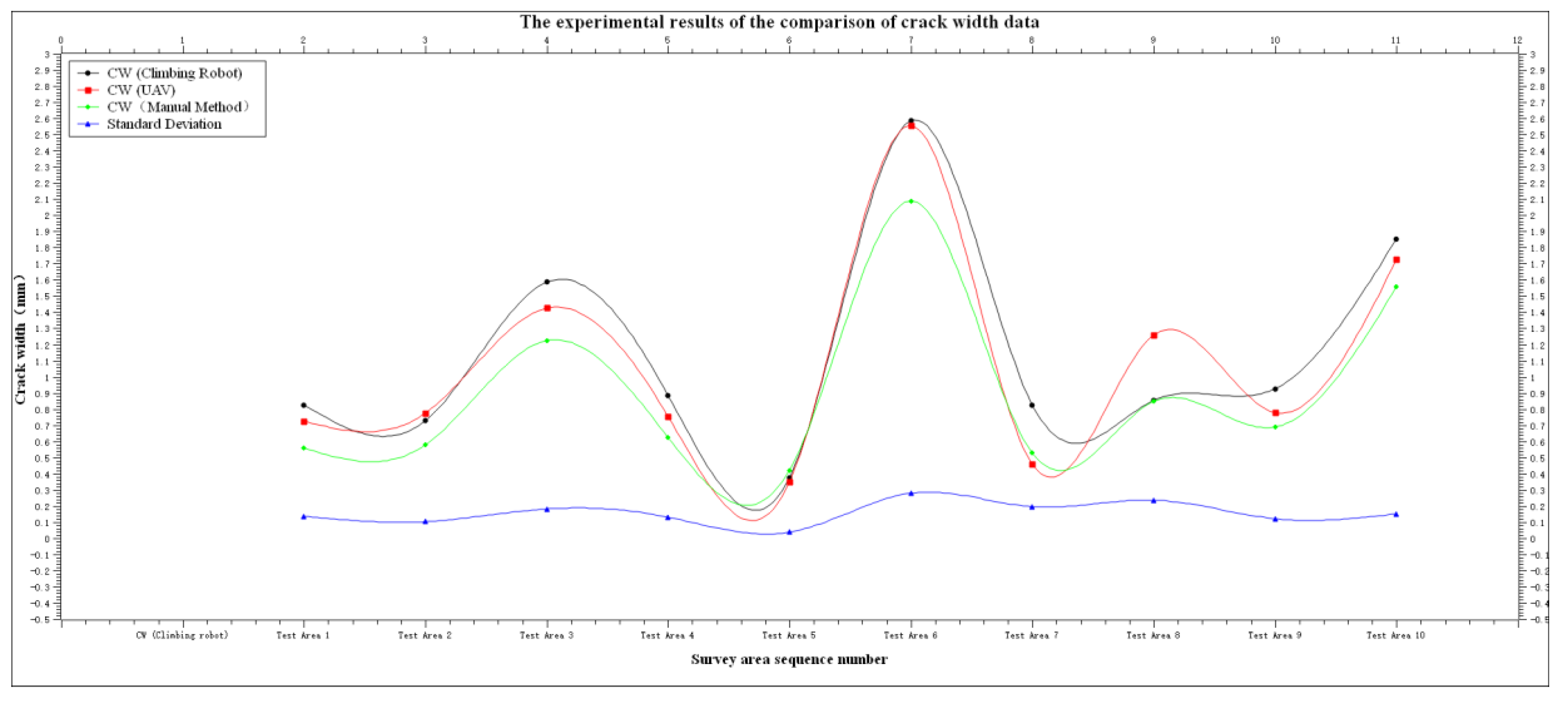
3.1.3. Collection and Comparison of Other Parameters with Manually Collected Data of Component Dimensions and Crack Widths
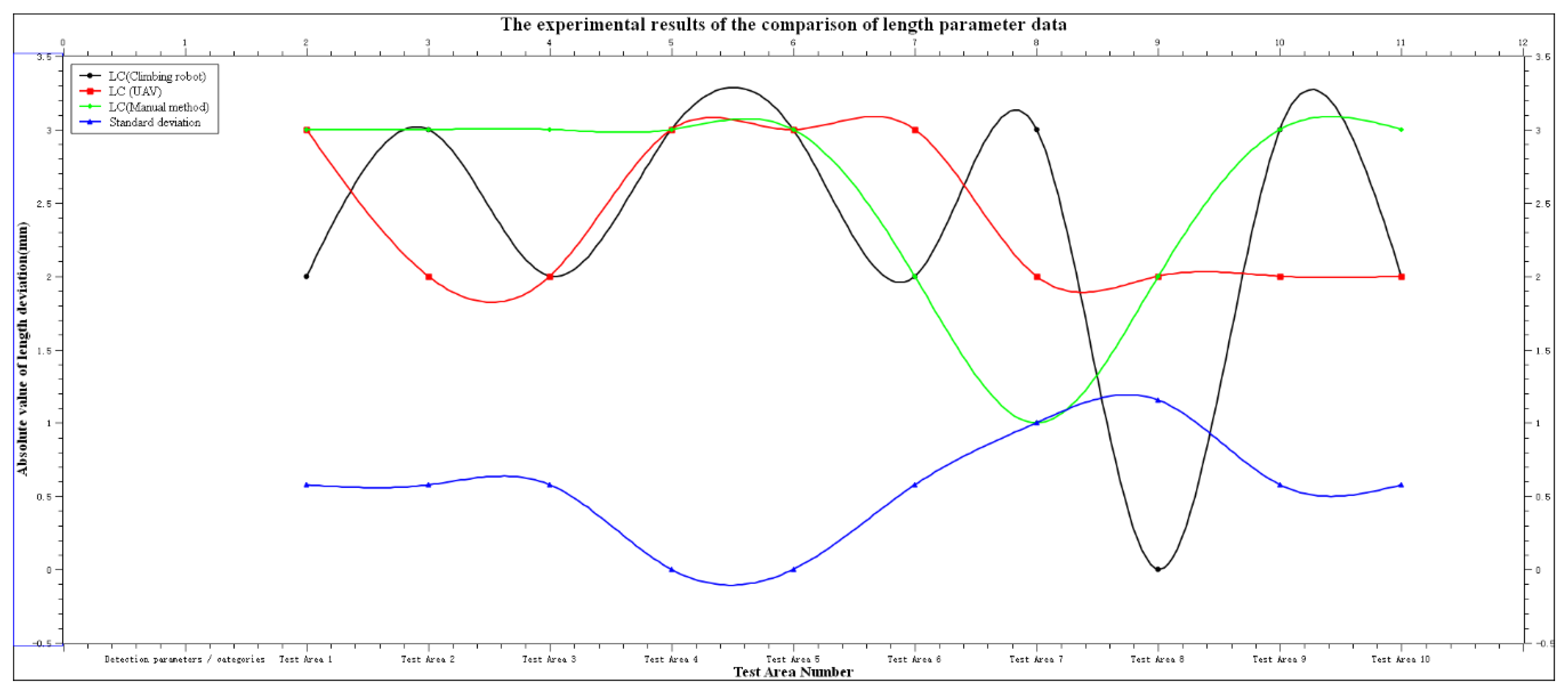

| DETECTING PARAMETER | CATEGORY | DETECTION ZONE 1 | DETECTION ZONE 2 | DETECTION ZONE 3 | DETECTION ZONE 4 | DETECTION ZONE 5 | DETECTION ZONE 6 | DETECTION ZONE 7 | DETECTION ZONE 8 | DETECTION ZONE 9 | DETECTION ZONE 10 |
| Length of concrete column (design:500*500) (mm) |
Using a stair-climbing robot to carry equipment for detection | 2 | 3 | 2 | 3 | 3 | 2 | 3 | 0 | 3 | 2 |
| Using unmanned aircraft to carry equipment for detection | 3 | 2 | 2 | 3 | 3 | 3 | 2 | 2 | 2 | 2 | |
| Manual testing | 3 | 3 | 3 | 3 | 3 | 2 | 1 | 2 | 3 | 3 | |
| (After comparing the measured values of the same survey area) Standard deviation | 0.577 | 0.577 | 0.577 | 0.000 | 0.000 | 0.577 | 1.000 | 1.155 | 0.577 | 0.577 | |
| Crack width of masonry components (mm) | Using a stair-climbing robot to carry equipment for detection | 0.825 | 0.728 | 1.585 | 0.885 | 0.375 | 2.584 | 0.825 | 0.854 | 0.925 | 1.854 |
| Using unmanned aircraft to carry equipment for detection | 0.724 | 0.774 | 1.425 | 0.754 | 0.348 | 2.554 | 0.458 | 1.258 | 0.778 | 1.725 | |
| Manual testing | 0.558 | 0.578 | 1.224 | 0.625 | 0.421 | 2.087 | 0.527 | 0.847 | 0.688 | 1.555 | |
| (After comparing the measured values of the same survey area) Standard deviation | 0.135 | 0.102 | 0.181 | 0.130 | 0.037 | 0.279 | 0.195 | 0.235 | 0.120 | 0.150 | |
3.2. Technology Application
4. Conclusion and Outlook
Funding
References
- Xin Wenhai. Research on the Application of Unmanned Aerial Vehicle Technology in Residential Building Surveying [J]. Housing and Living, 2025, (10): 169-172.
- Ye Cong. Research on the Application of Unmanned Aerial Vehicle Aerial Surveying Technology in Engineering Measurement [J]. China Equipment Engineering, 2025, (08): 219-221.
- Zhu Yuanjun, Li Yan, Zhang Xuejun, et al. Urban Airspace Unmanned Aerial Vehicle Safety Path Planning Based on Risk Constraints [J/OL]. Journal of Beijing University of Aeronautics and Astronautics, 1-16 [2025-05-06]. [CrossRef]
- Wu Kaijun, Bai Chenshuai, Du Jianjun, et al. Detection Model and Method for Corn Plant Center in Unmanned Aerial Vehicle Images [J/OL]. Computer Engineering and Applications, 1-17 [2025-08-21]. https://link.cnki.net/urlid/11.2127.TP.20240703.1101.002.
- Hu Jiale, Zhou Min, Shen Fei. Improved Detection Algorithm for Small Targets in Unmanned Aerial Vehicle Based on RTDETR [J]. Computer Engineering and Applications, 2024, 60, 198–206.
- Zhang Wei. Application of Unmanned Aerial Vehicle Technology in Building Deformation Monitoring [J]. Science and Technology Innovation, 2025, (07): 181-184.
- Liu Boke, Yin Xuefeng, Sun Chuanyu, et al. Research on 3D Scene Navigation Method of Unmanned Aerial Vehicle Based on Deep Reinforcement Learning [J/OL]. Journal of Graphics, 1-7 [2025-05-06]. http://kns.cnki.net/kcms/detail/10.1034.T.20250425.1508.002.html.
- Fang Zhanjie. Research on the Principle and Function of Human-like Gait Climbing Robot Mechanism [D]. South China University of Technology, 2022. [CrossRef]
- Hou Jinlong, Xu Bin, Liu Shaoguang. Application and Analysis of Using Unmanned Aerial Vehicle to Conduct Exterior Wall Leakage Detection by High-Definition Visible Light and Infrared Thermal Imaging Method [J]. China Building Waterproofing, 2024, (06): 39-42. [CrossRef]
- Li Xiaopeng, Li Xinmin, Zhang Jie, et al. Structural Safety Detection and Analysis of Buildings after Fire [J]. Quality Engineering, 2024, 42, 35–41.
- Jia Liang, Lin Mingwen, Qi Lijin, et al. Research on Multi-Scale Target Detection for Unmanned Aerial Vehicle Images [J]. Semiconductor Optoelectronics, 2024, 45, 501–507+514. [CrossRef]
- Li Jie. Research on Gait Planning and Control of Human-like Robot Climbing [D]. Qingdao University of Technology, 2018.
- Yuan Xiaobo, Zhang Yun, Kang Jili, et al. Application of Unmanned Aerial Vehicle Intelligent Inspection in New Energy Power Station [J]. Hydropower Station Electrical Equipment Technology. 2024, 47, 59–61. [CrossRef]
- Hou Jinlong, Xu Bin, Liu Shaoguang. Application and Analysis of Using Unmanned Aerial Vehicle to Conduct Exterior Wall Leakage Detection by High-Definition Visible Light and Infrared Thermal Imaging Method [J] China Building Waterproofing, 2024, (06): 39-42. [CrossRef]
- Xu Ji Hong, Xie Peng. Key Points for Safety Assessment of Concrete Structure Buildings [J]. Journal of Wuhu Vocational and Technical College, 2023, 25, 39–43.
- Zhao Tingting. An Example of Structural Inspection and Reinforcement Treatment for a Kindergarten [J]. Shanxi Architecture, 2023, 49, 71–74. [CrossRef]
- Liu Guang. Design Research on Safety Operation System for Substations Based on Inspection Robots [J]. Light and Lighting, 2025, 49, 142–145.
- Fan Beijie, Wang Xiuxiu, Shan Chengxue, et al. Application of Unmanned Aerial Vehicle in Pine Wood Nematode Disease Monitoring [J]. Agricultural Science and Technology Innovation, 2025, (05): 57-59.
- Zhong Shuai, Wang Liping. MCS-RETR: An Improved UAV Aerial Image Target Detection Method Based on RT-DETR [J/OL]. Journal of Aeronautics, 1-16 [2025-05-06]. http://kns.cnki.net/kcms/detail/11.1929.v.20250428.1511.004.html.
- Chen Xiaojiang. Application of UAV Image Processing Technology in Surveying Engineering [J]. Engineering Construction and Design, 2025, (07): 189-191. [CrossRef]
- Zhou Kai. Technical Application Points of UAV in Residential Building Construction Surveying [J]. Housing and Residence, 2025, (07): 169-172.
- Raju S S, Sagar M, Shashikant G B. Adoption of Drone Technology in Construction - A Study on Interaction between Various Challenges [J]. World Journal of Engineering, 2025, 22, 128–140. [CrossRef]
- Yiğit Y A, Uysal M. Automatic Crack Detection and Structural Inspection of Cultural Heritage Buildings Using UAV Photogrammetry and Digital Twin Technology [J]. Journal of Building Engineering, 2024, 94109952-109952.
- Cağatay T, Yeşim Z İ. Trends in Flying Robot Technology (Drone) in the Construction Industry: A Review [J]. Architecture, Civil Engineering, Environment, 2023, 16, 47–68. [CrossRef]
- Elghaish F, Matarneh S, Talebi S, et al. Toward Digitalization in the Construction Industry with Immersive and Drone Technologies: A Critical Literature Review [J]. Smart and Sustinable Built Environment, 2020, 10, 345–363.
- Robotics; Findings from Kyonggi University in the Area of Robotics Reported (Curved-spoke Tri-wheel Mechanism for Fast Stair-climbing)[J].Journal of Engineering. 2020.
- Robotics; New Findings from Xuzhou University of Technology in the Area of Robotics Described (Stairs-climbing Capacity of a W-shaped Track Robot)[J].Journal of Robotics & Machine Learning. 2019.
- Xiao Cuicui, Yuan Hang. Research on Building Exterior Wall Leakage and Hollowing Detection Based on Infrared Thermal Imaging Technology. Northern Architecture, 2025, 10, 70–73.
- Zhang Bingxin, Wu Shili, Chen Yinglin. Application Difficulties and Optimization Measures of Thermal Imaging Technology in House Hollowing Detection [J]. Real Estate World, 2024, (24): 152.


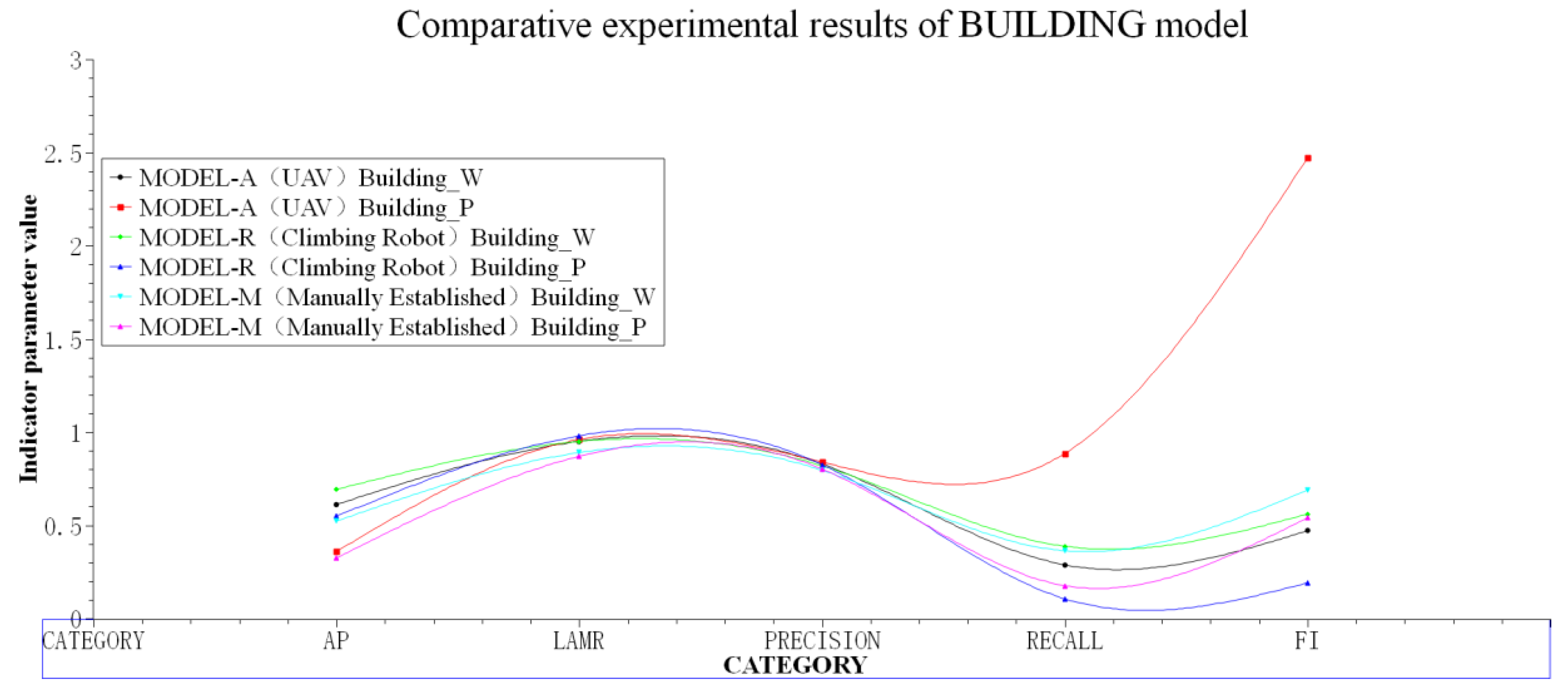
| MODEL SERIES | CATEGORY | AP | LAMR | PRECISION | RECALL | FI |
| MODEL-A (UAV) | Building_W | 61.12% | 0.95 | 82.88% | 28.72% | 0.47 |
| Building_P | 35.88% | 0.96 | 83.89% | 88.50% | 0.12 | |
| MODEL-R (Ladder-climbing robot) | Building_W | 69.24% | 0.95 | 81.87% | 38.70% | 0.56 |
| Building_P | 54.81% | 0.98 | 82.46% | 10.52% | 0.19 | |
| MODEL-M (Manually established) | Building_W | 52.23% | 0.89 | 79.52% | 36.24% | 0.69 |
| Building_P | 32.42% | 0.87 | 80.14% | 17.52% | 0.54 |
| DETECTING PARAMETER | CATEGORY | DETECTION ZONE |
STANDARD DEVIATION |
|||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |||
| Mortar rebound | Using a stair-climbing robot to carry equipment for detection(MPa) | 12.4 | 16.5 | 14.2 | 12.2 | 10.5 | 10.2 | 10.5 | 12.5 | 12.5 | 11.5 | 1.911 |
| Manual Testing(MPa) | 22.2 | 24.5 | 22.5 | 22.2 | 21.0 | 22.5 | 19.3 | 20.2 | 22.5 | 22.5 | 1.446 | |
| Brick Rebound | Using a stair-climbing robot to carry equipment for detection(MPa) | 24.5 | 25.8 | 26.5 | 27.5 | 29.6 | 30.2 | 30.4 | 32.1 | 32.2 | 32.5 | 2.881 |
| Manual Testing(MPa) | 40.2 | 38.2 | 39.2 | 38.2 | 35.4 | 39.2 | 40.2 | 40.9 | 39.6 | 39.4 | 1.539 | |
| Concrete Rebound | Using a stair-climbing robot to carry equipment for detection(MPa) | 28.3 | 31.5 | 15.6 | 16.7 | 18.5 | 19.5 | 20.2 | 21.3 | 18.8 | 22.6 | 5.021 |
| Manual Testing(MPa) | 35.5 | 34.8 | 32.2 | 30.5 | 28.0 | 29.0 | 30.2 | 29.5 | 29.5 | 30.5 | 2.467 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



