
Submitted:
05 October 2025
Posted:
06 October 2025
You are already at the latest version
Abstract
A polarity of an exceptional geometry of type E6 is called regular if its fix structure, viewed as simplicial complex, is a building. Polarities which do not act trivial on the underlying field were classified a long time ago by Jacques Tits. In the present paper, we classify the regular polarities of exceptional geometries of type E6 that act trivial on the underlying (arbitrary) field. As a result, we discover new subgeometries of the exceptional geometry of type E6.
Keywords:
spherical buildings
; duality
; exceptional type E6
; polarities
; generalised quadrangles
; metasymplectic space
; absolute points
1. Introduction
The exceptional groups and corresponding exceptional geometries have since their discovery ever been a rich source of beautiful connections and remarkable behaviour. However, due to their rather restrictive accessibility, a lot of properties that should parallel properties of classical geometries remain yet undiscovered. One of these properties concerns polarities of exceptional geometries of type . Although polarities of the classical geometries such as projective spaces are well understood via their absolute geometry, there is, to the best of our knowledge, no result in the literature describing the possible absolute geometries of a polarity of an exceptional geometry of type . If the polarity induces a non-trivial involution of the ground field, then it defines a so-called “form of type ”, and those are treated in [16].
The richest source of irreducible spherical buildings of rank at least 3 and Moufang spherical buildings of rank 2, are those associated to algebraic groups over arbitrary fields. Each of those is determined by a “form” of an “absolute” example, which is the building associated to a simple algebraic group over an algebraically closed field (and its type is called the absolute type). That procedure is described in [17]. From that paper we learn that each irreducible building associated to a simple algebraic group corresponds to a Tits index, which describes the absolute type, and the way the “relative” building sits in the absolute one. Pictorially, these Tits diagrams consist of Dynkin diagrams with encircled nodes. Each such diagram can be seen as a fix diagram of the corresponding Galois group, here called the descent group (see [11,17]) and is defined as follows: one encircles the sets of nodes of the types of minimal simplices of the absolute building that are fixed under the action of the descent group. Although the Tits index does not uniquely determine the relative building, the information provided by this index is conceived as being satisfactory.
Coming back to polarities of buildings of type (a polarity being an involution that acts type-interchanging), the Tits indices in [17] classify all such polarities acting non-trivially on the associated field. Calling a polarity “linear” if it acts trivially on the underlying field, the goal of this paper is to describe the different linear polarities by their absolute geometry, that is, the geometry of the fixed simplices, in case this fix structure is interesting, that is, in case it is a building itself. This, in particular, implies that the fix structure is non-empty; polarities with empty fix structure will be called “anisotropic”, and they map every object of the building to an opposite object. If the fix structure is a building, then it conforms to a fix diagram and we nail down the absolute type and the corresponding Tits index of the fix building. If the characteristic of the underlying field is not equal to 2, then each polarity that is not anisotropic, gives rise to a fixed subbuilding and a fix diagram, and also to a Tits index. In characteristic 2, there are only two classes having as fix structure a (thick) building of rank at least 2; in the other cases the fix structure could be called a “degenerate building”, just like pseudo-polarities in projective space over fields with characteristic 2 have a degenerate polar space as fix structure. One of the “good” classes corresponds to symplectic polarities, the other one relates to classical generalised quadrangles defined over proper inseparable field extensions of the ground field. These do not have a Tits index, but are usually defined via a pseudo-quadratic form. We will introduce these quadrangles with a direct construction. For a precise statement of our main results, we refer to Section 2 below. We now spend some more words on our motivation.
As already alluded to, Tits indices provide examples of subbuildings of buildings defined over algebraically closed fields. By decomposing the Galois group, we obtain chains of nested subbuildings, and this allows to interpret Tits indices for “split” spherical buildings over arbitrary fields; “split” here means that it is obtained from a building over an algebraically closed field using the trivial Tits index, that is, pictorially the one that encircles every single node of the Dynkin diagram (in the symbols of [17] this would be  , with * = (1) in the classical case, and * = 0 in the exceptional cases). However, the subbuildings thus obtained are usually smaller than the subbuildings obtained from linear automorphisms (automorphisms acting trivially on the underlying field). Investigating linear polarities of buildings of type reveals indeed large subbuildings, which say a little more about the structure of the ambient building than the smaller ones obtained by Galois descent. For instance, one of the linear polarities that we will encounter, called the “symplectic polarities”, defines a geometric hyperplane of the standard geometry of type .
, with * = (1) in the classical case, and * = 0 in the exceptional cases). However, the subbuildings thus obtained are usually smaller than the subbuildings obtained from linear automorphisms (automorphisms acting trivially on the underlying field). Investigating linear polarities of buildings of type reveals indeed large subbuildings, which say a little more about the structure of the ambient building than the smaller ones obtained by Galois descent. For instance, one of the linear polarities that we will encounter, called the “symplectic polarities”, defines a geometric hyperplane of the standard geometry of type .
, with * = (1) in the classical case, and * = 0 in the exceptional cases). However, the subbuildings thus obtained are usually smaller than the subbuildings obtained from linear automorphisms (automorphisms acting trivially on the underlying field). Investigating linear polarities of buildings of type reveals indeed large subbuildings, which say a little more about the structure of the ambient building than the smaller ones obtained by Galois descent. For instance, one of the linear polarities that we will encounter, called the “symplectic polarities”, defines a geometric hyperplane of the standard geometry of type .Concerning our results, to the best of our knowledge, the polarities of type II over a field with characteristic 2 are the first examples of automorphisms of any split building with fix structure a classical generalised quadrangle of “mixed type” that does not arise from Galois descent, which settles this existence question. Furthermore, it is interesting to know that almost all absolute types of the fix structures in the case of characteristic different from 2 are . Somehow the authors would have expected type to turn up (as large subgeometry of buildings of type , the absolute type for the symplectic polarities), but it does not.
We end this introduction by noting that Theorem 4 provides a way to explicitly calculate the subspace of dimension 9 spanned by an arbitrary symp in the standard representation the exceptional geometry of type over any field in 26-dimensional projective space, as given by Aschbacher [2]. This by itself could be useful in other situations, in particular in computational environments.
Structure of the Paper
In Section 2, we introduce the necessary notions in order to be able to state our main results more precisely. Then, in Section 3, we recall some known results that we will use in our proves. Most of them will concern the standard exceptional geometry of type over an arbitrary field , which fully describes the corresponding building of type . Our method requires some knowledge about polarities in two other geometries: projective spaces of dimension 5, and hyperbolic quadrics in projective spaces of dimension 9, also called “triality quadrics”. We study the latter in Section 4. Then, in Section 5 we prove our main results. The last section is devoted to provide examples, which should also settle existence of the different classes of polarities turning up in our main results.
2. Main Results
We assume the reader is familiar with the basics of (spherical) building theory, see [1,18], in particular with opposition, Coxeter and Dynkin diagrams and the Moufang condition. We will view a spherical building as a simplicial complex, numbering the types of the vertices with Bourbaki labelling [3]. In the present paper, we are concerned with buildings of type . Their symmetric Coxeter or Dynkin diagram, including the Bourbaki labelling, looks like

It is proved in [18] that for each field , there exists a unique building of type , which we denote by , and call the building of type over . The latter is sometimes also referred to as the ground field. It means that each projective space that turns up as a residue is defined from a vector space over .
We now introduce fix diagrams. Let be an arbitrary irreducible spherical building, and let G be an automorphism group of . Then the fix diagram for G is the Coxeter/Dynkin diagram of furnished with encircled orbits of nodes under the action of G on the diagram indicating the types of minimal simplices that are fixed by G. Such diagrams are (only) very useful if the fix structure of G is a building again, and we will only use fix diagrams in that case (indeed, as soon as G preserves types and fixes a chamber, which is somehow the generic case, the fix diagram is trivial—all nodes are encircled, but this does not provide useful information). Some examples related to are given in Figure 1, where we also introduce the names of the various fix diagrams, for later reference.
Figure 1.
The possible fix diagrams for involutions in

A special type of fix diagrams are the Tits indices, introduced in [17], and therein called simply indices, as a generalisation of the Witt index. Roughly speaking, a Tits index is a fix diagram for an automorphism group of a split building that acts faithfully on the underlying field of the (irreducible) building. If a building arises like this, the Tits index is unique.
But not all irreducible spherical buildings arise like this. First of all, in rank 2, there are exotic examples of buildings. Rank 2 simplical complexes are just graphs and spherical buildings of rank 2 are graphs with diameter n and girth , , in which case we talk about a generalised n-gon (when we do not specify n we say generalised polygon). The Moufang condition [20] distinguishes the exotic ones from the ones that behave just like the higher rank irreducible spherical buldings which, by the way, are automatically Moufang. There are three types of constructions of irreducible Moufang spherical buildings of rank at least 2. The first one is via a Tits index. This applies to the “majority” of spherical Moufang buildings (note that every irreducible spherical building of rank at least 3 is Moufang). These buildings arise naturally from algebraic groups. A second construction is from classical groups, via pseudo-quadratic forms in vector spaces over skew fields (there is a large overlap with the first method). The third construction is via so-called groups of mixed type, which is a phenomenon in low characteristic using purely inseparable field extensions.
We now present a construction of the second type, with connections to the third type above. We construct a generalised quadrangle. Let be field with characteristic 2 and suppose there are elements such that is an independent set of vectors of , considered as vector space over the field of squares of . Let be a 7-dimensional vector space over and let
be a quadratic form. Let be the simplicial complex defined by the graph with vertex set the set of isotropic 1- and 2-spaces of q, adjacent when the 1-space is contained in the 2-space. Then is a (Moufang) generalised quadrangle, as follows from Chapter 7 of [18].
Finally, before stating our main results, we mention that there is also the notion of a Moufang building of rank 1, called a Moufang set [19]. The same constructions as above apply to Moufang sets. In particular there are Moufang sets arising from Tits indices.
We can now state our main results. We distinguish between the case of characteristic 2 and distinct from 2. We begin with the latter.
Theorem 1.
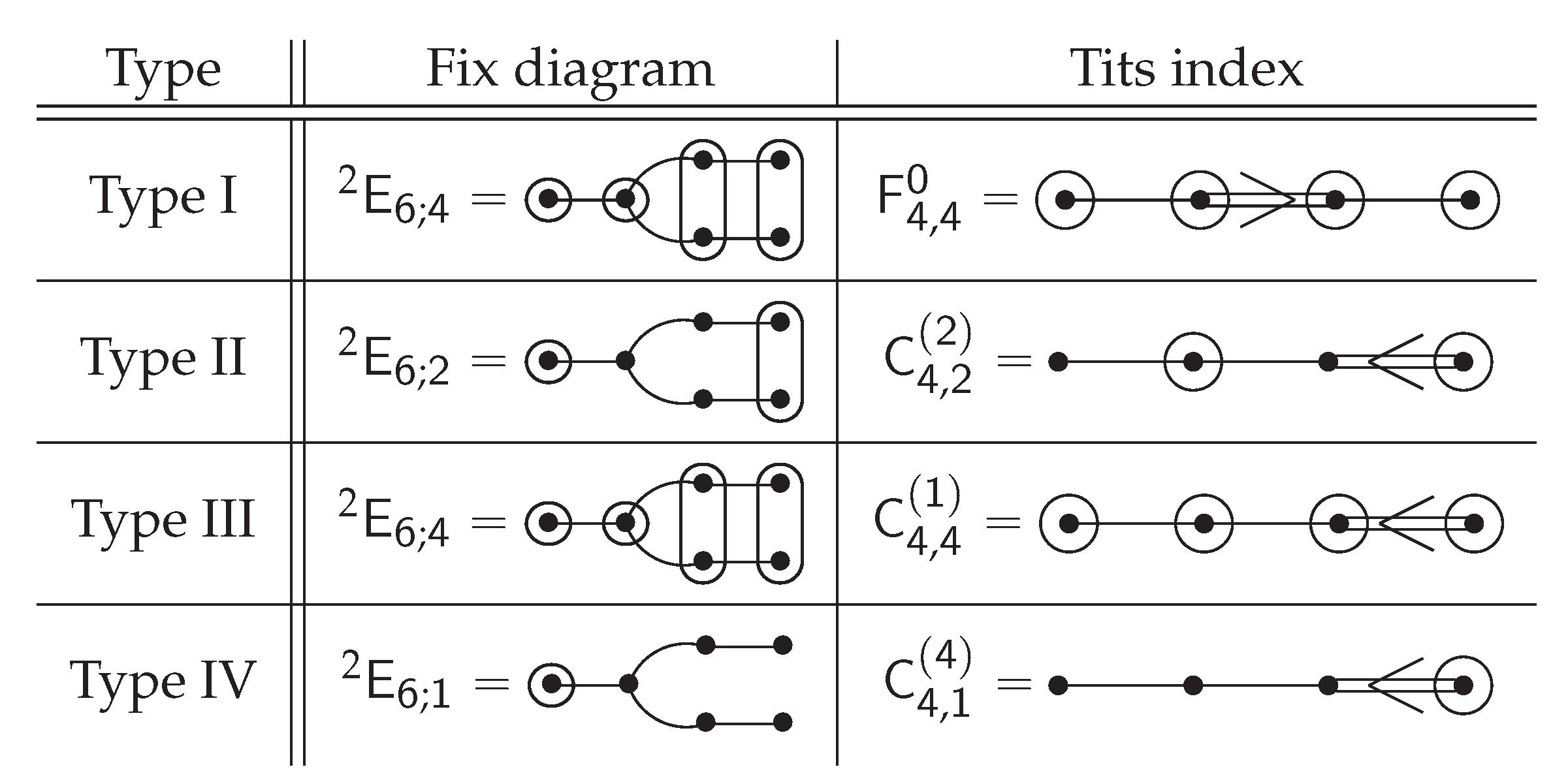
Let Δ be a building of type over a field with . Let ρ be a polarity of Δ, that is, an involution interchanging the types 1 and 6, and 3 and 5. Suppose ρ is not anisotropic, that is, it maps at least one object not to an opposite object. Then its fix structure is a building (possibly of rank 1) and the associated fix diagram and corresponding Tits index are given as in Figure 2.
Figure 2.
Polarities of with
Theorem 2.
Let Δ be a building of type over a field with . Let ρ be a polarity of Δ and suppose that ρ is not anisotropic. If the fix structure for ρ is a (thick) building (possibly of rank 1), then the associated fix diagram and corresponding Tits index or isomorphism type are given as inFigure 3, where such that is linearly independent in the vector space over .
Figure 3.
Regular polarities of with
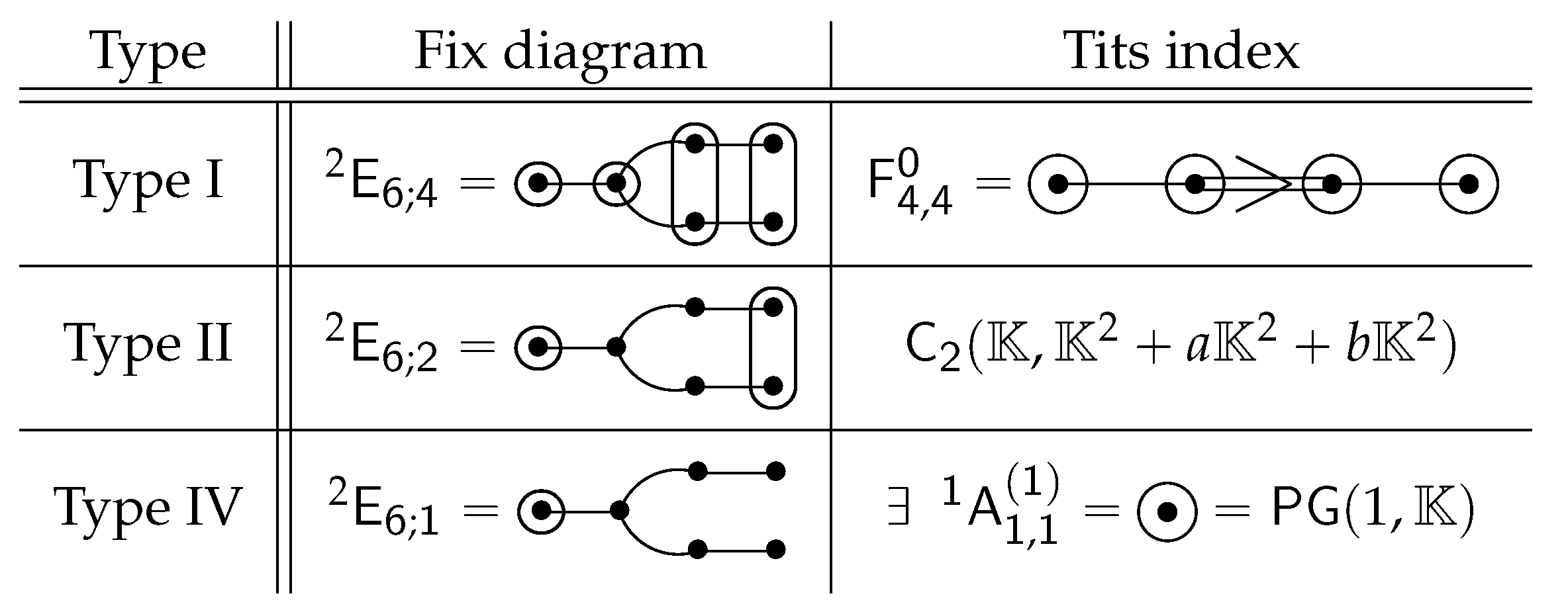
Concerning the last row of Figure 3, there are presumably different possibilities for the isomorphism type of the fix building of rank 1, but we will establish one with the given type. This shows the different behaviour compared with the case of characteristic different from 2.
3. Preliminaries
3.1. Buildings and Point-Line Geometries
As already mentioned, we assume familiarness with the basic notions in the theory of spherical buildings. We say that an automorphism is anisotropic if it maps every simplex to an opposite simplex. We have the following characterisation of anisotropic automorphisms. It basically says that it suffices to look at the images of vertices of any given type in order to check whether an automorphism is anisotropic or not.
Lemma 1.
(Theorem 3.1 of [7]). An automorphism of a spherical building maps every element of a given type to an opposite element if, and only if, it is anisotropic.
The way we are going to approach buildings in this paper is via their most standard geometry. More precisely, we turn them into point-line geometries using a well known recipe. Before quickly describing that recipe, we define point-line geometries.
Definition 1.
A point-line geometry Γ is a bipartite graph where the vertices of a given class X are calledpointsand the vertices of the other class Y are calledlines. Points adjacent to a common line are calledcollinearand we denote . The set of points collinear to a given point x is denoted as . Arepeated lineis a set of points that is the neighbourhood of two distinct lines. Asubgeometryis an induced subgraph, and it is calledfullif it contains the full neighbourhood in Γ of any of its lines. A subgeometry is calledconvexif it contains all vertices of each shortest path between every pair of its vertices. A subgeometry is called ageometric hyperplaneif for each line L, the neighbour set either is contained in it, or intersects the subgeometry in a unique point.
For a given point-line geometry Γ with classes X and Y, we define . Then the bipartite graph with classes X and , where a point is adjacent to a member L of , is a point-line geometry without repeated lines. We call thereductionof Γ. The graph is completely determined by the sets X and .
Definition 2.
Now let Δ be an irreducible spherical building and let X be the set of vertices of some given type, say i. Define Y to be the set of panels of cotype i. A vertex v of type i is adjacent to a panel P of cotype i if is a chamber. This defines a point-line geometry Γ the reduction of which is called the i-Grassmannian of Δ. If the diagram of Δ is simply laced, and Δ has rank , then Δ is determined by its diagram, say , and a given skew field . In that case we denote Δ by and its i-Grassmannian Γ by . In general, we say that Γ is a Lie incidence geometry of type .
3.2. Projective Spaces
With the conventions of Definition 2, the projective space of dimension n over a skew field , which is usually denoted , is also denoted by . Projective planes are Lie incidence geometries of type .
We will need the following two lemmas for projective spaces.
Lemma 2.
(Theorem 4.4 of [9]). An involution of a projective plane fixes at least three points and at least three lines.
The next lemma immediately follows from [12, Proposition 3.3].
Lemma 3.
Let σ be a type-preserving involution of , . Suppose σ is induced by a linear transformation of the underlying vector space. Suppose also that σ admits at least one fixed point. Then exactly one of the following occurs.
Compactenum 1.[]
- , the set of fixed points is a subspace , the set of hyperplanes is the set of hyperplanes containing a given subspace , and .
- and the set of fixed points is the union of two disjoint subspaces U and , with .
3.3. Hyperbolic Quadrics
In the present paper, we will approach buildings of type via their Lie incidence geometries of type . An important ingredient to define such geometries and list their properties is the notion of a hyperbolic quadric and the related building of type , for some natural .
Definition 3.
Ahyperbolic quadric Q (over the field is the set of points of a projective space , , whose coordinates with respect to a suitable basis, satisfy the quadratic equation
where we work with generic coordinates . The maximum (projective) dimension of subspaces entirely contained in Q is , and such subspaces are called generators. They fall into two classes in such a way that subspaces belonging to distinct classes intersect each other in a projective subspace of dimension , with i even. We call these classes the oriflamme classes. Subspaces contained in Q are usually called singular subspaces. The vertices of the corresponding building of type are the singular subspaces of projective dimension , and the maximal singular subspaces comprise two types of vertices according to the oriflamme class they are contained in. Two vertices corresponding to singular subspace of dimension form a simplex if they intersect in a subspace of dimension (see [18]). Apolarityof is a type preserving automorphism (also calledcollineation) of preserving Q and interchanging the two oriflamme classes.
Note that the points and lines of Q define the geometry .
In general, quadratic equations define quadrics, and the Witt index of a quadric is one more than the maximum projective dimension of a singular subspace. A quadric is non-degenerate if there exist disjoint maximal singular subspaces. A non-degenerate quadric of Witt index n in is called a parabolic quadric. It defines a Lie incidence geometry of type .
Example 1.
Let Q be the hyperbolic quadric defined in Definition 3. Let H be a hyperplane of , which is not a tangent hyperplane to Q. Then there is a unique involution ρ of pointwise fixing H and preserving Q, and it is called a parabolic polarity (because it is a polarity in the above sense, and its fix structure is a parabolic quadric, that is, an irreducible quadric in H with Witt index . An explicit description of ρ is given by if H has equation .
In general, we have the following property of polarities in .
Lemma 4.
Every polarity ρ of a hyperbolic quadric fixes at least one point.
Proof.
Let U be an arbitrary maximal singular subspace. Then either is a point (which is fixed under ), or is a plane . In the latter case induces an involution in . Then the result follows from Lemma 2. □
3.4. Geometries of Type
Now let be a building of type over the field . We are going to work with the Lie incidence geometry , the 1-Grassmannian of . A good reference is [15], see also [14]. Additional properties of will be derived using an apartment of the corresponding building. First we describe the elements of and link them the Coxeter diagram.
The point of are the vertices of type 1 of , by the very definition. The lines correspond to the vertices of type 3. Vertices of type 4 are planes of , whereas vertices of type 5 and 2 are projective subspaces of dimension 4 and 5, respectively. We refer to then as 4-spaces and 5-spaces, respectively. Finally, vertices of type 6 correspond to convex subspaces of isomorphic to and will be called symps, as in the theory of parapolar spaces (but we avoid introducing this theory here, see the later chapters of [13]).
We display the basic properties of (which can be found in [15]).
- Preposition 1. Let be two points of and let be two symps. Then the following properties hold.
- Compactenum 2. []
- Either , or there is a unique line containing both x and y, or x and y are not collinear and there is a unique symp containing both x and y;
- Either , or is a 4-space, or is a point;
- Either , or x is contained in unique 5-space which intersects in a maximal singular subspace distinct from a 4-space, or x is not collinear to any point of .
- The intersection of the unique 5-space with the symp will be referred to as a -space. It follows that 4-spaces and -spaces of a symp belong to different oriflamme classes. The unique symp through x and y in is sometimes denoted as .
Definition 4.
Two symps of are calledadjacentif they intersect in a 4-space. A point x and a symp ξ are calledfarif no point of ξ is collinear to x; they are calledcloseif x is collinear to a -space of ξ.
In fact, the properties in Preposition 1 can easily be checked inside an apartment, keeping in mind that every pair of simplices is contained in a common apartment. We now present an explicit construction of such apartment , based on [4, §10.3.4], and we call it the standard apartment. The point set of is
To avoid confusing, for instance, the point with the pair of points 1 and 2, we will denote the former shorthand as 12. Lines, or vertices of (Bourbaki) type 3, in are the pairs and , , the pairs , , the pairs and , with and , and the pairs , with and . This now defines a graph . The vertices of type 4 correspond to the cliques of size 3, those of type 2 to the cliques of size 6, those of type 5 to the maximal cliques of size 5, and those of type 6 to the sets of vertices not adjacent to a given vertex. Each such set forms a so-called pentacross, that is, an apartment of a building of type consisting of 10 points arranged in a complete graph minus a matching.
Let us for instance check Preposition 1. As symp we can take the set of vertices of adjacent to . This is the set
Now the vertex is not adjacent to any of the vertices of . The vertex 1 is adjacent to the vertices , which form indeed a -space as they are contained in the 5-space defined by . Any other vertex not contained in is of the form with . Such a vertex is adjacent to the vertices and m, with . Each such set of vertices again forms a -space as it is contained in a 5-space by adding the vertex itself.
From now one we leave such straightforward checks to the reader.
Similarly, one proves the following basic property.
- Preposition 2. A point x of is either contained in a given 5-space W of , or it is collinear to all points of a 3-space inside W, or it is collinear to a unique point of W.
If a point x is collinear to (all points of) a 3-space of a 5-space W, then we say that x is close to W; if it is collinear to a unique point of W then we say that x is far from W.
The diagram of shows a symmetry. This reflects into a principle of duality for . Interchanging the roles of points and symps, and of lines and 4-spaces, gives us new properties out of old ones. One has to keep in mind when vertices of the corresponding building form a simplex. If two vertices do, we call the elements of the geometry incident. For instance, a 5-space is incident with a symp if they intersect in a -space. A 5-space is incident with a 4-space if they intersect in a 3-space. Other incidences are given by inclusion.
The dual of Preposition 2 is the following.
- Preposition 3. A symp of is either incident with a given 5-space W of , or it intersects it in a line, or it is disjoint from it.
Likewise we use the terminology of a symp being close or far from a given 5-space W, meaning that is a line or empty, respectively.
The mutual position of two 5-spaces can also be seen in . This leads to the following observation.
Lemma 5.
Two distinct 5-space of either intersect in a plane, or intersect in unique point (in which case the are incident with common symp, which automatically contains the intersection point), or are disjoint and there exists a unique 5-space intersecting both 5-spaces in respective planes, or are opposite, and then every point of either is far from the other.
A pencil of 5-spaces with base plane π is the set of 5-spaces containing the given plane . The next lemma follows directly from the Coxeter diagram and its geometric interpretation.
Lemma 6.
Let be an incident point-symp pair of . Define X as the set of 5-spaces containing p and intersecting ξ in a -space. Define as the set of pencils of 5-spaces with base plane some plane containing p and itself contained in ξ. Then is a Lie incidence geometry isomorphic to . One oriflamme class of maximal singular subspaces corresponds to the set of lines through x in ξ; the other to the set of 4-spaces through x in ξ.
The geometry will be referred to as the residue at in .
Lemma 7.
If a symp ξ through a point x close to a 5-space W in is close to W, then the line is contained in .
Proof.
We check this in . We can take W the 5-space defined by , and . Then an arbitrary symp containing x and close to W is given by the set of vertices not collinear to a point of the form , with . Then and the points i and j are clearly collinear to . □
Lemma 8.
Let ξ be a symp far from some 5-space W in and let be the unique symp adjacent to ξ and incident to W. Then each point of ξ far from W is collinear to a (unique) point of .
Proof.
This can be checked inside , but there is also a short direct argument. Indeed, let x be a point of far from W. Since x is collinear to points of , it is collinear to all points of a -space U of . Since -spaces of form an oriflamme class, U intersects , which is also a -space, in a point, which is automatically the unique point of W collinear to x. □
For the final lemma of this section, we recall from Lemma 5 that two 5-spaces which intersect in a point, are incident with a common symp that contains the intersection point. We denote this symp as .
Lemma 9.
Let be three 5-spaces such that
Compactenum 3.[]
and ;
and .
Then W and are opposite.
Proof. Let y be an arbitrary point of the -space . Suppose for a contradiction that y is collinear to at least a 3-space S of . Then y is collinear to at least a plane of . Now, since contains a 3-space T in , the two symps and intersect in a 4-space U. We claim that . Indeed, by assumption . Hence a putative point z of would be collinear to , contradicting Preposition 2. The claim follows. So y is collinear to a 3-space of U and a disjoint plane in , all contained in , contradicting Preposition 2 again. Hence every point of the -space is far from . It follows from Lemma 5 that, if W and are not opposite, then they share a unique point p. But this is absurd since then p is collinear to both x and , hence to a 3-space of , hence to a plane of . Since it is also collinear to the -space , this leads to a contradiction in view of Preposition 1.
The lemma is proved. □
4. Linear Polarities of the Triality Quadric
Each collineation of is induced by a unique collineation of the ambient projective space . We call linear if its extension to does not involve a field automorphism, that is, is induced by a linear map of the underlying vector space. Recall that a polarity of a hyperbolic quadric is an involutive collineation that interchanges the oriflamme classes of maximal singular subspaces. Also, note that a parabolic polarity is the unique non-trivial collineation of pointwise fixing a given subspace isomorphic to a parabolic quadric of Witt index . Indeed, since is axial in , it is central, say with centre c. Since lines through c intersect the polar space in at most two points, has order 2 and so the name “polarity” is justified.
We have the following characterisation.
Lemma 10.
A collineation ρ of is a parabolic polarity if, and only if, for every maximal singular subspace W the intersection is a plane.
Proof.
The “only if” part follows by definition of parabolic polarity. We now show the “if” part. Let W be a maximal singular subspace and suppose for a contradiction that some line L of W not contained in is mapped onto a disjoint line . An arbitrary maximal singular subspace X intersecting W in precisely L is mapped onto a maximal singular subspace with . Since the only point of L collinear to is , we find that is at most a line, a contradiction. Hence is a point and it easily follows, by varying L, that is fixed pointwise. This, in turn, implies that the set of fixed points is a geometric hyperplane, which clearly does not coincide with , for any point x. Hence is a parabolic polarity by definition. □
- Preposition 4. Let be a linear polarity of , . Then either
- Compactenum 4. []
- is a parabolic polarity;
- The fix structure of is a subquadric of Witt index 1 which is the intersection with of a 4-dimensional subspace of , and no maximal singular subspace is adjacent to its image under ;
- The set of fixed points is the union of a conic and its perp (which is a subspace isomorphic to ).
Proof.
We denote the involution of the ambient projective space inducing in also by . Since , there is a polarity of whose set of absolute points is precisely the hyperbolic quadric Q defined by . Since , Lemma 3 implies that the set of fixed points of is the union of two disjoint subspaces U and with . We review all possibilities. We may assume . Note that, since preserves Q, we always have or .
Compactenum 5.
- (0)
- . If , then and every singular 3-space of Q through U is preserved, implying that is type-preserving, a contradiction. Hence and U does not belong to Q. Then we have situation .
- (1)
- . As in , leads to a contradiction. Hence again. Since , we find that . Suppose first that U intersects Q in two points . Then every singular 3-space of Q through x intersects in a plane and hence is stabilised by . This again implies that is type-preserving, a contradiction. Suppose now that U and Q are disjoint. Set . We claim that is non-degenerate and has Witt index 2. Indeed, is non-degenerate since is empty and hence non-degenerate. Since , the Witt index of is at least 2. Suppose contains a plane . Then . The latter is a 4-space containing the two singular 3-spaces of Q through . Hence U intersects each of these singular 3-spaces, a contradiction. The claim is proved. Now let W be a maximal singular subspace of Q containing a line L of . Since L is fixed pointwise and is a polarity, we deduce that is a plane, stabilised by . Since and pointwise fixes the line L of , it fixes an additional point of , which necessarily has to lie in . But this is impossible as . This shows that this case does not arise.
- (2)
- . As in , leads to a contradiction. Hence and so is a non-degenerate conic. There are two possibilities. The first one is that is empty. Similarly as in , one shows that is a non-degenerate quadric of Witt index 1. We claim that this leads to . Indeed, each maximal singular subspace W of Q intersects in a point. Lemma 3 implies that is either a point or a line. If is a line, is type-preserving and it is always a line. The second possibility is that is a (non-empty) conic. This leads to .
- (3)
- . As in , is non-degenerate. Using similar arguments as above, one shows that the Witt indices of and coincide. If this Witt index is 0, then there are no fixed point, contradicting Lemma 4. If the Witt index is 1, then consider a line L intersecting U and non-trivially, say in the respective points u and . Since L is stabilised by , similarly as above we find a fixed plane, which only contains two fixed points (u and ), contradicting Lemma 2. Finally, if the Witt index of both and were equal to 2, then each maximal singular subspace spanned by a line of and one of , would be fixed, which implies that would be type-preserving, a contradiction.
□
- Preposition 5. Let be a linear polarity of , . We consider in its ambient projective space . Then either
Compactenum 6. []
- is a parabolic polarity, that is, is the unique non-trivial collineation pointwise fixing a given non-degenerate hyperplane of ;
- The fix structure of is a subquadric P of Witt index 1 which is the intersection with of a 4-dimensional subspace of , it has a plane nucleus, and no maximal singular subspace is adjacent to its image under ;
- The set of fixed points is the intersection of with a 4-dimensional subspace U and has the structure of a cone with vertex some point x and base a quadric of Witt index 1 in a hyperplane of U. No maximal singular subspace not through x is mapped onto an adjacent one, whereas each maximal singular subspace through x is mapped onto an adjacent one.
- The set of fixed points is the intersection of with a 4-dimensional subspace U and has the structure of a cone with vertex some line K and base a non-degenerate conic in some plane of U. A maximal singular subspace is mapped onto an adjacent one if, and only if, it is not disjoint from the line K.
Proof.
Let again Q be a quadric in corresponding to . Now Q is embedded in a unique symplectic polar space with corresponding symplectic polarity . The polarity of Q extends to a unique involution of , which we keep denoting as . Note that is also a collineation of , which commutes with . Let be the intersection of all stabilised hyperplanes (and then, by Lemma 3, each hyperplane through is stabilised by ). Then each point of is fixed (indeed, let , then ). Hence the subspace consisting of all fixed points of is precisely . It follows that , so is a singular subspace of . If were contained in Q, then all maximal singular subspaces of Q through would be fixed, in particular would be type-preserving, a contradiction. We review the possibilities for . Note .
Compactenum 7. []
- (0)
- . Here, is a point off Q and this leads to situation .
- (1)
- . Here, is a line. Then is 5-dimensional and hence intersects every maximal singular subspace in at least a line, which is consequently fixed by . Hence, since is type-interchanging, corresponding maximal singular subspaces intersect in a plane. Lemma 10 leads to (which, however, cannot occur here; our argument shows would be type-preserving in this case).
- (2)
- . Suppose first . Since , at least one point per maximal singular subspace is fixed. If a singular line L were pointwise fixed, then, since , we would find . The latter is a 5-space intersecting Q in a quadric with radical L. This implies that , and hence is not disjoint from Q, a contradiction. Using Lemma 2, this leads to . Now suppose . Similarly as in the previous case, one shows that no line disjoint from is pointwise fixed by , and hence, also similarly, each maximal singular subspace W not containing x contains exactly one fixed point . Hence, using Lemma 2 again, we deduce that is not a plane. We conclude . Now let W be a maximal singular subspace containing x. Then , with M a line in not through x. This implies some line of W through x is pointwise fixed and so is a plane . That plane cannot be pointwsie fixed as otherwise , which is the union of two hyperplanes, contains , contradicting . This is situation . Similarly, leads to situation .
- (3)
- . Since every maximal singular subspace of Q is also singular with respect to , the intersection is a singular subspace of Q. Hence there exists a maximal singular subspace W of Q disjoint from . This implies that no point of , which is globally stabilised, is fixed. Hence is not a point, and, by Lemma 2, it is not a plane either. This contradicts the fact that is not type-preserving.
□
Definition 5.
We say that a linear polarity of has type I, II, III or IV, respectively, if situation , , or , respectively, of either Preposition 4 or Preposition 5 occurs.
5. Proofs of Theorem 1 and Theorem 2
In this section, is a parapolar space of type over the field , and is a given linear polarity of . The set of symps of is denoted by .
5.1. Fix Diagrams
We first show that the fix diagram of a polarity is one of or .
Lemma 11.
Each absolute point is contained in a fixed 5-space.
Proof.
This follows directly from Lemma 6 combined with Lemma 4. □
- Preposition 6. If does not fix any 5-space, then it is anisotropic.
Proof.
Suppose for a contradiction that is not anisotropic. Then there is a 5-space W such that is not opposite W. There are three possibilities. Note that by assumption.
Compactenum 8. []
-
is a plane π.Select . Then , since preserves the incidence relation. Hence x is absolute and fixes a 5-space by Lemma 11, a contradiction to our assumptions.
- is a point x. Then clearly x is mapped onto the unique symp incident with both W and , which contains x. Again, Lemma 11 leads to a contradiction.
-
and W is not opposite .Then there is a unique 5-space that intersects both W and in some plane. Clearly, fixes , again a contradiction.
This completes the proof of the proposition. □
From now on, we assume that is not anisotropic. Then fixes at least one 5-space W. Let be arbitrary. Then is incident with W, hence intersects W in a -space which we can denote as . Then is a polarity of W. We now prove that the Witt index of is restricted to three possibilities.
Preposition 7. With the above notation, let w be the Witt index of . Then .
Proof.
We have to show that , so suppose for a contradiction that . Then there exist an absolute point and an absolute line L with . In the residue of , the line L corresponds to (an absolute with respect to the induced polarity ) maximal singular subspace U, and W to a point fixed by . Since U is absolute, is a plane , and induces an involution in . Now Lemma 2 implies that fixes some line. Such a line corresponds in to a plane in W through x, fixed under both and . This contradicts and the proof is complete. □
Lemma 12.
Let x be an absolute point of the polarity ρ and let W be a fixed 5-space. Assume that x is far from W. Then the unique point collinear to x is also absolute, , and there exists a unique 5-space fixed by ρ and containing both x and y.
Proof.
Since , is adjacent to and incident to W. Hence Lemma 8 yields and y is absolute. Let U be the intersection of the symps and . Note that because is far from W, and hence disjoint from W, and as the contrary would imply that x is close to W. Hence and are 3-spaces. If did not coincide with , then there would exist a point . This would imply , a contradiction. It follows that is a 5-space . Note that is the unique 5-space containing y and incident to ; hence it is mapped onto the unique 5-space incident to and containing x, which coincides with . Hence is fixed. It is also the unique fixed 5-space containing x and y since such a 5-space is automatically incident with both and . The lemma is proved. □
Lemma 13.
Let x be an absolute point of the polarity ρ and let W be a fixed 5-space. Assume that x is close to W. Let L be the intersection of W with . Then the plane is fixed by ρ.
Proof.
The 4-space is mapped onto the line and is hence absolute by Lemma 7. The plane is then mapped onto the intersection of with , and that is exactly itself. □
Lemma 14.
Let Γ be the graph with vertices the absolute points of the polarity ρ, adjacent when contained in a common 5-space, fixed under ρ. If Γ is not empty, then it is connected.
Proof.
Let x and y be two absolute points. Lemma 11 yields a 5-space W containing y and fixed by , If , then x is adjacent to y in (and we denote ). Suppose now that x is close to W. Then, by Lemma 13, denoting by L the intersection , the plane is fixed. It follows that each point z on L is absolute. Now in the residue of , the plane corresponds to a line in a fixed plane, and hence contains at least one fixed point, which corresponds to a fixed 5-space containing , and hence both of x and z. Now in . At last, suppose that x is far from W and let z be the unique point of W collinear to x. Then z is absolute (so ) and by Lemma 12. The lemma is proved. □
We record an immediate consequence of the proof of Lemma 14.
Corollary 1.
For every pair of absolute points of ρ, there exists an absolute point z not collinear to either x or y. In other words, is a simplex opposite both and .
The following is a direct consequence of the classification of polarities in finite-dimensional projective spaces.
Lemma 15.
With the above notation, one of the following holds.
Compactenum 9.[]
- 1.
- is a symplectic polarity;
- 2.
- and is an orthogonal polarity with absolute geometry ;
- 3.
- and is an orthogonal polarity of Witt index 1, hence with absolute geometry a non-ruled non-degenerate non-empty quadric;
- 4.
- and is a pseudo polarity with absolute point set an absolute hyperplane;
- 5.
- and is a pseudo polarity with absolute point set an absolute 3-space;
- 6.
- and is a pseudo polarity with absolute point set a plane fixed by ;
- 7.
- and is a pseudo polarity with absolute point set a non-absolute line;
- 8.
- and is a pseudo polarity with a unique absolute point;
- (j)
- is an anisotropic polarity.
We say that has type A,B, …, H,J, respectively, if situation ,, …, , of Lemma 15 occurs. Now we treat the different cases of . We start with .
5.2. Fixing metasymplectic spaces in characteristic different from 2.
Suppose and admits an absolute point x. Then it induces a polarity in the residue of in . By Preposition 4, there are at least two non-adjacent 5-spaces of incident with both x and stabilised by . Denote one of them by W. With that, we have the following result.
Lemma 16.
With the above notation, the following types are compatible:
| Type of | Type of |
| Type I | Type A or D |
| Type II | Type C, G or H |
| Type III | Type A, B, D, E or F |
| Type IV | Type A, D, E |
In particular, if , then has type II if, and only if, has typeC. Also, if has type III or IV, then there exists W such that the type of is not A.
Proof.
This follows from comparing the local behaviours of the different polarities. For example, all local polarities of both Types I and A are locally symplectic (every point is absolute), and hence they are compatible. However, all points of the conic in the description of Type III in characteristic different from 2 also have this local structure, hence Type A is compatible with both Types I and III. The rest is analogous. □
We now show that if , for a given polarity , the type of is independent of the absolute point x.
Lemma 17.
Let ρ be a linear polarity of Δ, with . Then for any pair of absolute points, the type of coincides with the type of .
Proof.
First suppose that, for some fixed 5-space W, the type of is C. Let x and y be two absolute points contained in the same fixed 5-space. Preposition 4 yields a fixed 5-space through x such that . Then Lemma 15 yields an absolute point such that (and ). Again Preposition 4 yields a fixed 5-space such that . Lemma 9 implies that W is opposite . Since the absolute structure in W is determined by a non-degenerate quadric, or a symplectic polar space, we find an absolute point such that u is not contained in either or . Denote by the unique point of collinear to u, then it follows, just like in the proof of connected Lemma 14, that is absolute. Also, one deduces that is the projection of onto . Then [18, Proposition 3.29] implies that is opposite both and . By projection, the fix structure incident to is isomorphic to the one incident to , and the same thing holds for the fix structures incident to and . The lemma now follows from Lemma 14. □
Lemma 17 permits us to subdivide the linear polarities of for into three major classes, which we designate with the same type as the type of the polarity induced in the residue of the pair , with x any absolute point and its image, or Type IV if there are no absolute points, but the polarity is not anisotropic.
- Preposition 8. Polarities of type I are symplectic polarities.
Proof.
Suppose for a contradiction that the polarity is not a symplectic polarity. Then, since is not anisotropic, [21, Main Result 1.2]] implies the existence of a point x close to its image . As follows from Preposition 1, there is a unique 5-space W incident with both x and . Since the pair is mapped onto itself, W is fixed. But x is not an absolute point for , contradicting the fact that is of type A. □
Remark 1.
If we define type I polarities in characteristic 2 as those for which has type I and has type A, for all absolute points x and all fixed 5-spaces W, then Preposition 8 also holds in characteristic 2.
Remark 2.
The arguments in the proof of Preposition 8, in particular the reference to [21], can be used to give a short proof of Preposition 6: if a polarity is not anisotropic, then, according to [21, Main Result 1.2], it is either a symplectic polarity (and then it certainly fixed some 5-space), or there exists a point close to its image (and then, as in the proof of Preposition 8, the unique 5-space incident to both, is fixed). We record the latter for further reference.
Lemma 18.
If a point x of is mapped by a polarity ρ to a symp ξ close to x, then the unique 5-space incident with both x and ξ is stabilised by ρ.
- Preposition 9. A polarity of type III is characterised by the property that its fixed structure is a non-thick metasymplectic space of type , more precisely, it is the line Grassmannian of a symplectic polar space of rank 4.
Proof.
Define the following point-line geometry : the points are the 5-spaces W such that and is symplectic, the lines are the absolute points of , incidence is natural (symmetrised) inclusion. We prove that is a polar space isomorphic to .
By Corollary 1, no point is collinear to all other points. Clearly, every line contains at least three points as it is bijective with a conic over (a line can be identified with the conic in Part (2) of the proof of Preposition 4). Now we check the one-or-all axiom. Let x be an absolute point and W a fixed 5-space not containing x. If x is far, then Lemma 12 yields a unique fixed 5-space through x containing an absolute point y of W. Now suppose that x is close to W. Lemma 13 yields a fixed plane through x intersecting W in a line L. Let be arbitrary. Recall that, by Preposition 4, the polarity pointwise fixes a conic C and a generalised quadrangle of type in the orthogonal complement of C with respect to the triality quadric Q. The 5-space W corresponds to a point . One verifies that corresponds to a fixed line M of contained in an absolute 3-space through w (the latter corresponds to the line L), but not incident with w. It follows that M is contained in . The line L corresponds to a(n absolute) 3-space of Q through M intersecting C in w. Likewise, the line corresponds to such a 3-space, and its intersection with C corresponds to a fixed 5-space with a symplectic polarity. Reversing the roles of x and z, and varying z over L, we see that each line of through x is contained in a unique fixed 5-space, and the set of all such 5-spaces corresponds to the pointwise fixed conic in the residue of whose orthogonal complement is also pointwise fixed. Hence, in , all points of the line corresponding to x are collinear to the point corresponding to W. The one-or-all axiom is proved.
Hence is a polar space. To see its type, we consider the residue at a point, say W. The lines of incident with W are the absolute points of . From the previous paragraph we deduce that two such absolute points correspond to lines in a plane of if, and only if, they are contained in an absolute line of . It follows that the residue in of the point corresponding to W is a symplectic polar space of rank 3 (the one defined by ). Hence is a symplectic polar space of rank 4 and the proposition is proved. □
5.3. Fixing a Generalised Quadrangle in Characteristic Different from 2
Here we handle the case that has type II. Note that in this case, there are no fixed planes and no absolute lines. Indeed, otherwise any point x on such an object would be absolute, and then would have fixed lines, a contradiction to the assumption that has type II. Preposition 10. A polarity of type II is characterised by the property that its fixed structure is a generalised quadrangle. More precisely, the point-line geometry with point set the set of absolute points of and line set the set of fixed 5-spaces under , with natural incidence, is the generalised quadrangle arising from the Tits index .
Proof.
We first prove that is a generalised quadrangle. It suffices to show the main axiom since clearly each line contains at least 3 points and each point is contained in at least 3 lines. So let x be an absolute point and W a fixed 5-space not containing x. By the fact that does not fix any plane, Lemma 13 implies that x is far from W. Then Lemma 12 yields a unique fixed 5-space through x intersecting W in an absolute point. Hence is a generalised quadrangle, as wanted.
Let W be a fixed 5-space and x an absolute point. Then is an orthogonal polarity which, over a splitting field, determines a hyperbolic quadric of Witt index 3. Hence its Tits index is 
 . Also, the fixed points of in the residue at form a quadric of Witt index 1 in a 4-dimensional space. Hence, over a suitable splitting field, this turns into a parabolic quadric of Witt index 2. Hence the Tits index of the fixed quadric is
. Also, the fixed points of in the residue at form a quadric of Witt index 1 in a 4-dimensional space. Hence, over a suitable splitting field, this turns into a parabolic quadric of Witt index 2. Hence the Tits index of the fixed quadric is  , which coincides with
, which coincides with  . Note that there is, in fact, also a component of rank 1, type , which is determined by the orthogonal complement of the previously mentioned 4-space. It now follows that, over a common splitting field, becomes of type III and hence is a form of . The above Tits indices paste together as the index :
. Note that there is, in fact, also a component of rank 1, type , which is determined by the orthogonal complement of the previously mentioned 4-space. It now follows that, over a common splitting field, becomes of type III and hence is a form of . The above Tits indices paste together as the index :  and that concludes the proof of the proposition. □
and that concludes the proof of the proposition. □
. Also, the fixed points of in the residue at form a quadric of Witt index 1 in a 4-dimensional space. Hence, over a suitable splitting field, this turns into a parabolic quadric of Witt index 2. Hence the Tits index of the fixed quadric is , which coincides with . Note that there is, in fact, also a component of rank 1, type , which is determined by the orthogonal complement of the previously mentioned 4-space. It now follows that, over a common splitting field, becomes of type III and hence is a form of . The above Tits indices paste together as the index : and that concludes the proof of the proposition. □5.4. Fixing a Rank 1 Building in Characteristic Different from 2
In this paragraph we assume that the polarity is not anisotropic and has no absolute points. Then the fix diagram is . We identified such polarity earlier as a polarity of type IV. Preposition 11. The fix structure of a polarity of type IV is a rank 1 building with Tits index .
Proof.
Let W be a fixed 5-space. Then is a linear polarity which, over a suitable splitting field , has maximal Witt index 3. It follows that has type III over and hence, by Section 5.3, the absolute type of the fix structure of over is . Since the 5-spaces with a hyperbolic polarity, correspond to vertices of type 4 in the associated building of type , the Tits index of fix structure of is and the proposition is proved. □
This concludes our analysis in the case , and Theorem 1 is proved.
5.5. Regular Polarities in Characteristic 2
Now we turn to the case . Note that we are only interested in regular polarities, that is, polarities the fix structure of which defines a building. In particular, each element must have an opposite. Opposites in the fix structure must also be opposites in because the fix structure is convex and the convex closure of two simplices is empty precisely when they are opposite. This observation enables us to restrict the possibilities for and , with W a fixed 5-space of and x an absolute point.
Lemma 19.
Let ρ be a polarity of , with . Let x be an absolute point and W a fixed 5-space. If has typeIIIorIV, or if has typeD, E, ForH, then ρ is not regular.
Proof.
Suppose first that has one of the types D, E, F or H. we note that in each of these cases there exists an absolute point p in W with the property that every other absolute point in W is contained in (it suffices to take p in the , where A is the subspace of absolute points and the existence of p follows from the fact that in these cases ). Now let q be an absolute point of such that is opposite in . Then is far from q and consequently, q is also far from W. Lemma 12 yields an absolute point not contained in , a contradiction.
Now suppose has type III or IV. Then Lemma 16 yields a fixed 5-space W of type D, E or F. The assertion now follows from the previous paragraph. □
There is an immediate consequence.
Corollary 2.
A regular polarity of , with , satisfies exactly one of the following:
- Compactenum 10.
- (Type I) The type of is I, for all absolute points x, and the type of is A, for all fixed 5-spaces W;
- (Type II) The type of isII, for all absolute points x, and the type of is G, for all fixed 5-spaces W.
- (Type IV) There are no absolute points, but there are fixed 5-spaces W; all corresponding polarities are anisotropic.
Remark 1 classifies polarities of type I. We now take a look at polarities of type II.
Preposition 12. A polarity of type II is characterised by the property that its fixed structure is a generalised quadrangle. More precisely, the point-line geometry with point set the set of absolute points of and line set the set of fixed 5-spaces under , with natural incidence, is a rank 2 building , with linearly independent in as vector space over . Moreover, all absolute points are contained in a common symp of .
Proof. The first part of the proof of Section 5.3 can be take over verbatim to show that is a generalised quadrangle, and every absolute point not contained in a given fixed 5-space is far from that 5-space. Notice also that lines of , as sets of absolute points, are singular lines of . Hence we can view as a full point-line subgeometry of .
We claim that is contained in a symplecton . Indeed, Let be opposite lines of ; they are singular lines contained in unique respective fixed 5-spaces. Since each point of L is collinear to a unique point of M, there is a unique symp containing both L and M. It now suffices to prove that each line of through some point of L belongs to . So, let x be any point on L and let K be any line of through x. Select a point not collinear to x. Then there is a unique line N through y intersecting K in some point, say z. Since , we conclude that . Hence also . The claim is proved.
Now we consider the geometry . With the above notation, the line K is the unique line of through x intersecting the fixed 5-space through N. Hence, the set S of points of lying in is isomorphic to the set of fixed points of in the residue at . We deduce from Preposition 5 that S is a quadric of Witt index 1 with plane nucleus. Since is a full subgeometry of , it follows from [8] that is contained in the subspace spanned by and S, and hence is the intersection of with a 6-dimensional subspace of its ambient projective space of dimension 9, by [5]. Since we can describe S as the set of points of a projective 4-space satisfying an equation of the form , with a linearly independent set of elements of over (then the nucleus plane has equations ), the proposition follows. □
The part of polarities of type IV in Theorem 2 will be proved in Section 6.3.4 when we write down an explicit form of any such polarity.
6. Concrete Constructions; Existence
6.1. Representation of Polarities
In order to construct examples of polarities of , we view it as a full subgeometry of . This has been done before, see [22, §3.1]. We recall the construction from [22] here.
Let be the standard apartment. Viewed as a graph, the complement is a bipartite graph and actually defines a building of rank 2—a generalised quadrangle with 3 points per line and five lines through each point. We denote the set of lines of by . We consider the following partition of into lines (equivalently, a partition of into cocliques of size 3):
Such a partition is usually called a spread of the generalised quadrangle . The above one has the special property that no subgrid of contains exactly two members of . Such spreads are called Hermitian, and one can easily check that they are characterised as follows.
- Preposition 13. Let be a spread of . Then the permutation of that maps i to j if the line , consists of two disjoint 3-cycles if, and only if, is Hermitian.
Let V be the 27-dimensional vector space over where the vectors of the standard basis are labeled by the points of . Hence the standard basis is of the form . We denote the coordinate corresponding to as . For every point , there is a quadratic form defined by
where and is the unique line of through p.
Let be the 26-dimensional projective space arising from V (hence the points of are the 1-spaces of V). Then it is shown in [22, §3.1] that the set of projective points with coordinates such that , for all , together with all projective lines contained in it, defines the geometry , which is unique for the given field as follows from the classification of irreducible thick spherical buildings in [18].
We denote the projective point corresponding to the vector as . Since we are interested in polarities, we want to see the symps of as points of the dual space , where they also should form a set of points isomorphic to . We are going to prove the following theorem. To do this, we claim that every symp of is contained in a unique hyperplane of that also contains all points close to . This is easily checked for the base points , , using the following straightforward lemma:
Lemma 20.
A point with is collinear to for some if, and only if, for all r collinear to q in Ξ.
Then we use the type preserving automorphism group of , which is the group of collineations of preserving by combining [6] and [10]. This shows the claim. In fact, it suffices to use the group generated by the following collineations.
Definition 6.
Let be a pair of opposite 5-spaces of Σ and let . Using Prepostion 13 we may assume that and . Then we define
This implies the following map on the coordinates of a vector :
One can check that this map preserves and hence defines a collineation of .
The group generated by these collineations is sometimes also called the little projective group, because is a so-called long root elation.
Recall that the hyperplane of with equation , , has dual coordinates (we use square brackets for clarity). We can now prove the following theorem.
Theorem 3.
A hyperplane with dual coordinates arises as for some symp ξ of if, and only if, the vector satisfies , for all .
Proof.
The assertion is obviously true for the base points , . Now, noticing that the automorphism reads in dual coordinates as , the assertion follows from applying to the base points. □
Theorem 3 implies that the matrix of a duality, that is, an isomorphism from to its dual, is just the matrix of a collineation of preserving .
6.2. The 9-Space Asociated to a Dual Point
Most examples of polarities that we will present map each base point to the dual of a base point. Hence, viewed as collineations, they permute the base points. Such collineations are determined by the image of six base vectors, as we will see (this conforms to the torus of as algebraic group being 6-dimensional). Extending to , we obtain a polarity of . However, not all absolute points for that polarity are absolute points for the polarity on : Besides the absolute points that do not lie on , also the points of that are mapped onto a close symp are absolute for the extended polarity. So one has to distinguish the hyperplane corresponding to the symp and the symp itself. Hence the following problem arises. Given a dual point , which coincides with , for a symp of , then we know , but what is the 9-space of spanned by ? The answer is given by the following theorem.
Theorem 4.
The symp corresponding to a dual point p of lies in the 9-space, spanned by the vectors, dual to the tangent hyperplanes in the dual point p of the quadrics with . In other words, if the point belongs to , then the 9-space spanned by the symp defined by the dual point is equal to
Proof.
We will use the fact that acts transitively on the points. The theorem holds for the dual points , by a straight forward calculation. Now let p have coordinates and assume the theorem holds for p. Then we want to prove that it still holds for .
As before, we may, without loss of generality, assume
Note that since p is a dual point, the (dual) coordinates of p are transformed using the dual map , which corresponds to
Define
Then the 9-space corresponding to p is equal to and the 9-space corresponding to is equal to . The theorem claims that the latter space coincides with . By symmetry (and interchanging with its inverse), it suffices to prove that . For that we will show all the generically distinct cases, namely we will prove that .
One finds the following, by the same calculations with a permutation on the indices and by changing, in some cases, a to :
Hence and the theorem is proved. □
Let and be the 5-spaces of contained in determined by and , respectively. The following consequence will be very useful to determine the type of the polarity induced in W (when W is stabilised).
Corollary 3.
The symp associated to the dual point , with if intersects in the -space with equation ( coordinatised with coordinates )
6.3. Explicit Form of Some Polarities of
We now provide the coordinate form of some polarities, not only proving existence of such polarities, but also ready-made for investigating further properties.
6.3.1. Polarities of Type I—Symplectic Polarities
In order to keep the oversight, we break up the coordinate tuple into suitable pieces. We denote the coordinates of a generic point as , and those of a dual point, or hyperplane, as . Then a symplectic polarity can be described by the following map from to .
This is indeed a symplectic polarity in characteristic unequal to 2 since it is easily checked that and are fixed and, by Corollary 3, every point of is absolute in . Similarly the 5-space of determined by is fixed and every point is absolute. Since in the line Grassmannian of a symplectic polar space of rank 4 no two symplectic symps share more than a point, the fix structure must be a thick metasymplectic space. Since the verification that a generic point is absolute happens over a ring of polynomials with integer coefficients, also over a field with characteristic 2, the set of absolute points is a hyperplane defining a symplectic polarity.
6.3.2. Polarities of Type III in Characteristic Unequal to 2
The following polarity, described by a map on the coordinates, has type III over a field of odd characteristic or characteristic 0.
Again, it can be verified using Corollary 3 that every point of is absolute. However, with the same notation as in the previous paragraph, a straightforward computation using Theorem 4 shows that the absolute points in form a hyperbolic quadric in . Hence we have a polarity of type III.
6.3.3. Polarities of Type II in All Characteristics
The following polarity has type II, independent of the characteristic. Let be such that the bilinear form
is anisotropic, that is, has only the trivial vector as isotropic vector, and such that is a perfect square in . For instance, over the reals, or , , and over the Laurent series , with any field with characteristic 2. Let be such that . Then we define the polarity as follows.
As before, one can check with some calculations that this really defines a polarity of type II.
6.3.4. Polarities of Type IV
We now describe a polarity of type IV. In order to check that the polarity is really of type IV, one only has to verify that it fixes at least two 5-spaces and it has no absolute points in either. The following polarity obviously fixes and , and it has no absolute points in either if the form
is anisotropic (use Corollary 3 again).
where .
We now claim that, if , then there exists an example with the property that the only fixed 5-spaces are contained in the space , and hence they form a projective line over , establishing the last row of Figure 3 of Theorem 2. Indeed, suppose and are such that the field of Laurent series in the indeterminates over a field in characteristic 2, and set . One checks that the 5-space of contained in are given by . All points of U are absolute for the extended polarity in , because the set of absolute points of a pseudo polarity is a subspace. Hence, by Lemma 18, each point of is contained in a stabilised 5-space of . The claim is proved if we show that no point of outside U is absolute for the extended polarity. This, in turn, will follow if we show that the subspace complementary to U does not admit any absolute point. The matrix of the polarity restricted to is diagonal with diagonal
It now suffices to observe that the set
is linearly independent as set of vectors of the vector space over .
This concludes the proof of Theorem 2
References
- P. Abramenko & K. Brown, Buildings: Theory and Applications, Graduate Texts in Mathematics 248, Springer, 2008.
- M. Aschbacher, The 27-dimensional module for E6, I., Invent. Math. 89 (1987), 159–195.
- N. Bourbaki, Lie groups and Lie algebras, Chapters 4–6, Elements of Mathematics, Springer-Verlag, 2002.
- A. E. Brouwer, A. M. Cohen & A. Neumaier, Distance-Regular Graphs, Springer-Verlag, Berlin, New York, 1989.
- I. Cardinali, L. Giuzzi and A. Pasini. Nearly all subspaces of a classical polar space arise from its universal embedding, Lin. Alg. Appl. 627 (2021), 287–207.
- B. N. Cooperstein & E. E. Shult, Frames and bases of Lie incidence geometries, J. Geom. 60, (1997), 17–46.
- A. Devillers, J. Parkinson & H. Van Maldeghem, Automorphisms and opposition in twin buildings, J. Aust. Math. Soc. 94 (2013), 189–201.
- K. J. Dienst, Verallgemeinerte Vierecke in Pappusschen projektiven Räumen, Geom. Dedicata 9 (1980), 199–206. [CrossRef]
- D. R. Hughes & F. C. Piper, Projective Planes, Springer-Verlag, New York Heidelberg Berlin, 1973.
- A. Kasikova and E. E. Shult, Absolute embeddings of point-line geometries, J. Algebra 238 (2001), 265–291.
- B. Mühlherr, H. P. Petersson and R. M. Weiss, Descent in Buildings, Annals of Math. Studies 190, Princeton University Press, Princeton and Oxford, 2015.
- J. Parkinson & H. Van Maldeghem, Automorphisms and opposition in spherical buildings of classical type, Adv. Geom. 24 (2024), 287–321.
- E. E. Shult, Points and Lines: Characterizing the Classical Geometries, Universitext, Springer-Verlag, Berlin Heidelberg, 2011.
- T. A. Springer & F. Veldkamp, On Hjelmslev-Moufang planes, Math. Z. 107 (1968), 249–263.
- J. Tits, Sur la géometrie des R-espaces, J. Math. Pure Appl. (9) 36 (1957), 17–38.
- J. Tits, Les “formes réelles” des groupes de type E6, Séminaire Bourbaki, 10e année : 1957/1958, exp. no 162 (février 1958), 15 p., 2e éd. corrigée, Secrétariat mathématique, Paris 1958; reprinted in Séminaire Bourbaki 4, Société Mathématique de France, Paris (1995), 351–365.
- J. Tits, Classification of simple algebraic groups, in Algebraic groups and discontinuous subgroups, Proc. Summer Mathematical Inst., Boulder, July 5–August 6, 1965, Proc. Symp. Pure Math. 9, Amer. Math. Soc., Providence, RI (1966), 33–62.
- J. Tits, Buildings of Spherical Type and Finite BN-Pairs, Springer Lecture Notes Series 386, Springer-Verlag, 1974.
- J. Tits, Groupes de rang 1 et ensembles de Moufang, Annuaire du Collège de France, 100e année (1999–2000), 93–109.
- J. Tits & R. Weiss, Moufang Polygons, Springer Monographs in Mathematics, Springer, 2002.
- H. Van Maldeghem, Symplectic polarities in buildings of type E6, Des. Codes Cryptogr. 65 (2012), 115–125.
- H. Van Maldeghem & M. Victoor, On Severi varieties as intersections of a minimum number of quadrics, Cubo 24 (2022), 307–331.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



