Submitted:
24 September 2025
Posted:
26 September 2025
You are already at the latest version
Abstract
Ensuring safety remains a fundamental challenge in the utilization of autonomous vehi-cles (AVs) in real-world environments. Model Predictive Control (MPC) has emerged as a prominent control strategy for enhancing AV safety because of its ability to handle multi-variable systems, anticipate future events, and incorporate system constraints. This study conducts a systematic literature review (SLR) of MPC-based strategies for autonomous ve-hicle safety, with a focus on existing approaches, identified challenges, and emerging fu-ture directions, following the PRISMA 2020 guidelines. The methodology included prede-fined inclusion/exclusion criteria, structured screening, and thematic classification. Based on an in-depth examination of 33 peer-reviewed studies (2015–2025), a diverse landscape of MPC applications in AV safety has been revealed; particularly in three critical domains: collision avoidance and risk mitigation, trajectory tracking and path following, and inter-section and coordination tasks. Various formulations of the MPC have been explored such as linear, nonlinear, robust, adaptive, and learning-enhanced variants. These formula-tions are often integrated with perception modules, motion prediction, or probabilistic risk models to support real-time decision-making under uncertainty and constraints. Howev-er, it stills a challenge to achieve scalability, computational efficiency, and robustness in complex, high-speed, or uncertain environments.
In this study, the need for unified safety metrics, standard testing protocols, and scalable frameworks are highlighted to bridge control and perception. Also, the promising direc-tions have been outlined such as stochastic MPC, data-driven modeling, dual-control frameworks, and integration with vehicle-to-everything (V2X) communications. This study provides a foundation for developing the next generation of MPC schemes that are safer, more adaptable, and better aligned with the demands of fully autonomous driving systems.
Keywords:
Autonomous Vehicles (AVs)
; Model Predictive Control (MPC)
; safety assurance
; collision avoidance
; trajectory planning and tracking
; robust and adaptive control
; real-time control systems
; systematic review
1. Introduction
The rapid advancement in the technologies of autonomous vehicles (AVs) has a significant potential role in transforming transportation systems by improving mobility, efficiency, and safety. To ensure safety, AVs must not only follow desired trajectories but also respond in advance to dynamic obstacles, uncertain behaviors of other road users, and limitations in sensing and actuation. So, in real world environment, ensuring safety remains a core and unresolved challenge despite considerable progress in perception, localization, and decision-making systems. Therefore, control strategies must provide a real-time prediction, constraint satisfaction, and robust decision-making under uncertainty which all can be provided by Model Predictive Control (MPC).
MPC is considered as one of the leading control frameworks that has been used with AVs because of its ability to optimize future control actions over a receding time horizon while respecting system dynamics and operational constraints. Unlike traditional controllers, MPC has the benefit of enabling predictive modeling and optimization that makes it well-suited for applications such as trajectory tracking, collision avoidance, lane changing, overtaking, and cooperative driving. To address safety-critical challenges in AVs, an increasing number of studies have explored advanced MPC forms in the past decade such as robust, nonlinear, adaptive, stochastic, hierarchical, and learning-enhanced MPC.
Despite these advances, there is no comprehensive synthesis that specifically examines MPC's role in enhancing the safety of AVs within a systematic framework. For this reason, there are significant research barriers regarding firstly, the integration of MPC with perception, planning, and communication systems; secondly, the computational demands of real-time execution, and thirdly, the need for scalability under uncertainty. In addition, there are many areas that are still underexplored such as learning-based MPC, probabilistic safety modeling, and vehicle-to-everything (V2X) coordination.
To address this gap, this systematic review paper utilizes the PRISMA 2020 methodology which is an updated and widely endorsed guideline for reporting systematic reviews to ensure transparency, replicability, and methodological precision. This review aims to characterize the landscape of MPC-based safety strategies in autonomous vehicles by systematically identifying, evaluating, and synthesizing 38 research published between 2015 and 2025.
The specific objectives of this review are threefold. First, it aims to systematically classify and synthesize MPC-based strategies employed to enhance safety in AVs. Second, it examines the design methodologies, safety objectives, and control formulations underpinning these strategies. Finally, the review attempts to identify current limitations, highlight unresolved research gaps, and outline promising directions for future investigation. The structure of this paper is as follows:
2. Methodology
This systematic review was performed in accordance with the PRISMA 2020 guidelines, ensuring transparent, comprehensive, and replicable reporting of the methodology and results. The process followed the 27-item PRISMA checklist. The full study selection procedure is illustrated in Figure 1, which presents the PRISMA 2020 flow diagram that outlines the identification, screening, eligibility, and inclusion stages.
2.1. Database Selection and Search Strategy
Because of their extensive coverage of peer-reviewed research in engineering, control systems, and intelligent transportation, three major academic databases were selected: IEEE Xplore, Web of Science (WOS), and ScienceDirect. The targeted publications in this literature search are from January 2015 to May 2025 which have accelerated growth in AVs technologies and MPC-based control systems. To ensure retrieval of the most relevant studies, Boolean logic has been used for each database query to intersect three key conceptual domains which are Autonomous Vehicles, Model Predictive Control, and Safety-Oriented Concepts.
2.2. Screening and Eligibility Criteria
For in-depth analysis, a multi-stage screening process was conducted by combining title and abstract filtering, full-text review, and thematic relevance assessment.
2.2.1. Inclusion Criteria
If the study meets the following conditions, it will be included:
- It proposes or applies MPC (or a variant such as nonlinear, robust, adaptive, or stochastic MPC).
- The context’s application is clearly within autonomous or connected autonomous vehicles.
- The primary or secondary control objective includes safety-related concerns, such as collision avoidance, risk minimization, or safety-constrained planning.
2.2.2. Exclusion Criteria and Final Selection
If the study meets any of the following conditions, it will be excluded:
- The focus was only on energy efficiency, passenger comfort, or fuel economy, without any explicit safety-related control formulation.
- The study applied MPC in domains outside of AVs.
- The work was non-peer-reviewed (e.g., technical reports, theses, or preprints without peer review).
2.3. Thematic Classification and Overlap of Included Studies
To synthesize the literature in a systematic way, each of the included studies has been classified into one or more of three application-driven thematic categories. These three categories reflect the control function in which the MPC is applied to enhance safety in AVs.
- Collision Avoidance and Risk Mitigation: It focuses on obstacle detection, emergency maneuvers, and planning under risk or uncertainty.
- Trajectory Tracking and Path Following: It addresses accurate adherence to reference paths or waypoints under dynamic constraints, disturbances, or comfort objectives.
- Intersection and Coordination Tasks: It involves multi-agent planning for lane changes, merging, intersection handling, or platoon-level cooperation.
These thematic areas reflect the objectives of the control that are most relevant to the safety of AVs while allowing structured comparison of techniques. To enable a comprehensive analysis, studies have been categorized according to their functional objectives, regardless of the specific MPC variant used (e.g., linear, nonlinear, adaptive, robust, or learning-based).
It Is noticeable that several studies were classified into more than one category as they have hybrid or multi-functional architectures. The complete thematic classification is presented in Table 1, showing each study’s inclusion across the three safety-related application areas.
After reviewing the full text, [4] was excluded because it mainly addressed energy and sustainability management in hybrid vehicles, without specifically considering safety constraints in the MPC formulation. As a result, the final set for detailed analysis included 38 peer-reviewed studies.
3. Thematic Synthesis of Literature
This section presents a structured synthesis of the included studies in this review, categorized according to the primary safety-related applications of MPC in AVs. Based on a detailed examination of technical focus and control objectives, the literature was classified into three overarching thematic categories: collision avoidance and risk mitigation, trajectory tracking and path following, and intersection and coordination tasks.
3.1. Collision Avoidance and Risk Mitigation
Collision avoidance is one of the core requirements of safe autonomous driving. MPC enables proactive maneuver planning by predicting future states and enforcing obstacle constraints. This category covers a broad range of techniques, grouped into three directions: constraint-based and reactive approaches, uncertainty-aware control strategies, and perception-enhanced safety architectures.
3.1.1. Constraint-Based and Reactive Collision Avoidance
This category includes approaches that formally incorporate geometric and kinematic constraints into the MPC framework, aiming to guarantee obstacle clearance throughout the vehicle's planned trajectory. Studies such as [5,6,18,19] implement artificial potential fields (APFs), sigmoid safety margins, and time-varying repulsion zones to effectively steer vehicles away from both static and dynamic objects. Other references like references [3,30] utilize nonlinear MPC (NMPC) to execute escaping maneuvers at elevated speeds, ensuring compliance with vehicle dynamic constraints. Additionally, references [1,10] apply hard safety boundaries to maintain collision-free paths near environmental hazards.
3.1.2. Risk-Aware and Robust Control under Uncertainty
These approaches explicitly incorporate uncertainty in obstacle behavior, control inputs, or vehicle dynamics. For instance, Reference [38] employs Monte Carlo sampling to estimate collision probabilities across possible trajectories, whereas [15] utilizes reachability-based MPC to ensure invariant safety sets despite bounded disturbances. Robust MPC frameworks in references [14,35] guarantee constraint satisfaction under model mismatch or stochastic safety conditions. Adaptive control strategies in [17,36] update the vehicle model in real time, improving safety margins under dynamic or unknown disturbances.
3.1.3. Perception-Aware and Learning-Augmented Safety Architectures
This category comprises systems that integrate MPC with predictive perception or learning-based components. For example, Reference [29] incorporates a deep learning-based pedestrian motion forecasting module into the MPC planner to enable proactive avoidance. Game-theoretic MPC, as presented in [14] , models the strategic behavior of surrounding agents to ensure safety in mixed autonomy scenarios. Reference [37] introduces a dual-layer MPC framework that integrates a primary controller with a persistent safety fallback mechanism. Study [25] improves the robustness of MPC by incorporating Gaussian Process (GP)-based modeling to handle uncertain dynamics. Additionally, Reference [9] illustrates how event-triggered communication enables decentralized avoidance in cooperative driving environments.
The methods presented in Section 3.1.1 through 3.1.3 are summarized in Table 2, which categorizes the 18 collision avoidance studies based on their approach, employed techniques, and control objectives. The table highlights the evolution of safety strategies—from basic reactive obstacle repulsion to more advanced architectures that incorporate perception, learning, and stochastic modeling within the safety planning framework.
3.2. Trajectory Tracking and Path Following
Trajectory tracking is a crucial ability in the control of AVs that ensures the vehicle adheres to a pre-planned path, satisfying dynamic, physical, and safety constraints. MPC ensures predictive correction of tracking errors by minimizing deviation from the reference trajectory while optimizing control inputs under operational constraints. In this domine, the reviewed literature can be divided into three technical directions: nominal and adaptive tracking, robust and learning-enhanced control, and comfort- and context-aware formulations.
3.2.1. Nominal and Adaptive MPC for Tracking
Classical Linear MPC has been employed in [12,20,22] to achieve accurate tracking in structured environments while in [13,30] Nonlinear MPC has been implemented to capture complex vehicle dynamics, enabling accurate tracking under aggressive maneuvers. Adaptive and hybrid MPC frameworks have been employed in [27,28] to combine real-time parameter updates, mode switching, or uncertainty modeling. They can be used to maintain performance under varying conditions and partial observability.
3.2.2. Robust and Learning-Enhanced Tracking under Uncertainty
Robust MPC variants, along with learning-augmented models, are employed to address unmodeled dynamics, mitigate the effects of external disturbances, and compensate for parameter drift. References [31,33,39] employ Robust MPC by using linear-parameter-varying (LPV) and tube-based formulations to guarantee constraint satisfaction even under worst-case scenarios. Reference [25] employs Gaussian Processes (GPs) to model and compensate for residual discrepancies between predicted and actual dynamics, whereas [36] integrates GP-based learning into a two-layer MPC framework to achieve high-performance tracking during drifting and other aggressive maneuvers.
3.2.3. Comfort-Integrated and Context-Aware Trajectory Control
In some studies, the priority is not only accuracy, but also passengers’ comfort and adaptation to environmental conditions. Reference [34] presents a comfort-aware MPC formulation designed to minimize jerk and yaw rate, thereby enhancing ride smoothness. In contrast, Reference [24] applies fuzzy logic to switch between multiple MPC controllers according to environmental factors such as road curvature, speed profile, and contextual uncertainty. Together, these approaches promote human-centric operation in mixed and unpredictable driving conditions.
Additional works, including [7,11,21,32] also contribute to this category. Specifically, [7,21] address vehicle-following scenarios with integrated path tracking, [11] apply NMPC in structured environments, and [32] investigates path tracking in long-range contexts. These studies are summarized in Table 3, which consolidates the 18 trajectory tracking references by technical approach and control objective.
3.3. Intersection and Coordination Tasks
Autonomous vehicle (AV) coordination at intersections, lane merges, and during cooperative maneuvers presents challenges beyond single-vehicle control. These scenarios require dynamic interaction modeling, spatiotemporal negotiation, and communication-aware decision-making. MPC offers a principled framework for optimizing trajectories while explicitly managing constraints, multi-agent behavior, and decentralized execution. The reviewed literature in this domain can be grouped into three primary technical directions: cooperative and predictive maneuvering, hierarchical and contract-based control architectures, and centralized mission-level planning.
3.3.1. Cooperative and Predictive Maneuvering
In multi-agent scenarios such as merging, overtaking, and intersection negotiation, researchers have explored a range of decentralized and cooperative MPC strategies aimed at improving coordination and safety. References [2,26] apply Cooperative MPC (C-MPC) to coordinate vehicle trajectories by exchanging state information or predicted intent. Reference [9] proposes an event-triggered MPC approach that minimizes communication load by initiating message exchange only when predefined deviation thresholds are surpassed. Additionally, game-theoretic [14] and reachability-based [15] MPC approaches anticipate and respond to surrounding agents’ strategies, improving safety and coordination in contested environments.
3.3.2. Hierarchical and Contract-Based Control
Some methods enhance scalability and modularity by decomposing control tasks into multiple architectural layers, each responsible for a specific decision or planning function. Reference [23] employs hierarchical MPC for intersection management, allocating time slots at a higher level and ensuring dynamic feasibility through a lower-level control layer. Reference [8] introduces contract-based MPC, where constraint sets are negotiated between high-level planners and low-level controllers to ensure compatibility and reduce design-time conservatism.
3.3.3. Centralized and Mission-Level Planning
Centralized MPC frameworks coordinate the joint optimization of multiple AVs operating within structured environments. Reference [16] introduces a centralized planning architecture for cooperative area coverage, integrating trajectory planning and control execution within a unified hierarchical framework. While these methods provide guarantees of global optimality, they are often limited by high communication requirements and scalability challenges in complex urban traffic scenarios.
Table 4 provides a synthesis of the approaches covered in Section 3.3.1 to 3.3.3, classifying coordination-focused studies according to architectural design and control objectives. This thematic grouping illustrates the evolution of MPC from single-agent control toward cooperative and hierarchical planning that accounts for communication and negotiation constraints.
A summary of the number of studies reviewed under each thematic category is presented in Figure 2. This visual overview highlights the distribution of MPC-based control strategies across the three safety domains examined in this review. The figure also reflects subcategory emphasis, showing a strong focus on geometric and adaptive tracking, moderate attention to robustness and cooperation, and relatively limited exploration of centralized or comfort-oriented planning.
4. Cross-Cutting Challenges in MPC-Based Safety Control
While MPC shows strong potential for safety-critical tasks in autonomous vehicles, key challenges persist due to theoretical assumptions, architectural complexity, and computational trade-offs. This section summarizes open issues across the main MPC domains: collision avoidance, trajectory tracking, and coordination.
4.1. Challenges in Collision Avoidance and Risk Mitigation
Collision avoidance is among the most safety-critical domains in AV control, yet its practical implementation via MPC faces several key limitations:
- Oversimplified obstacle modeling: Numerous studies (e.g., [1,5]) assume deterministic obstacle behavior or rely on predefined trajectories, which restricts their applicability in complex, dynamic environments. Moreover, interactions with human-driven vehicles or pedestrians are frequently neglected.
- Constraint encoding difficulties: Methods like artificial potential fields (APFs) [6] and time-varying safety margins often face challenges in non-convex or high-speed scenarios, resulting in local minima or infeasible constrained maneuvers.
- Handling of uncertainty: Although some studies use robust or reachability-based methods (e.g., [15]), formal guarantees under significant uncertainty, particularly with moving obstacles or stochastic intent models, are uncommon. Probabilistic and learning-based approaches to uncertainty quantification remain largely underexplored.
- Limited cooperative awareness: Most MPC formulations take an ego-centric approach and do not explicitly consider shared environments or multi-agent interactions, which can undermine safety in mixed-autonomy traffic.
4.2. Challenges in Trajectory Tracking and Path Following
Trajectory tracking controllers need to ensure precision and robustness despite real-world disturbances and changing driving conditions. Nonetheless, several common challenges remain:
- Limited safety guarantees in learning-based methods: Techniques employing Gaussian Processes or neural models (e.g., [25,36]) enhance adaptability but often lack formal guarantees for safety, stability, or convergence. Integration with fallback controllers or verifiable safety monitors is rarely addressed.
- Comfort treated as secondary: While studies like [34] incorporate comfort metrics such as jerk and yaw rate, comfort is generally handled as a separate optimization objective rather than being fully integrated with safety, tracking, or constraint satisfaction.
4.3. Challenges in Intersection and Coordination Tasks
Coordination in multi-vehicle scenarios, including intersection crossing, merging, and lane negotiation, adds system-level complexity beyond traditional single-agent control. The main challenges include:
5. Future Research Directions
The future of Model Predictive Control (MPC) in autonomous vehicle safety requires moving beyond isolated algorithmic advances. Focus should shift toward system-level integration, better uncertainty quantification, real-time feasibility, and human-centered optimization. This section highlights key research directions across the three main safety areas: collision avoidance, trajectory tracking, and coordination.
5.1. Risk-Sensitive and Adaptive Collision Avoidance
Despite advances in constraint-based and nonlinear MPC for reactive maneuvers, real-world implementation still struggles with environmental uncertainty, prediction delays, and complex multi-agent interactions. Future efforts should focus on:
- Hybrid robust–learning MPC frameworks: These should combine formal guarantees, like reachability analysis or control barrier functions, with real-time uncertainty modeling using methods such as Gaussian Processes or Bayesian filters.
- Anytime MPC solvers: Designed for emergency situations, these solvers should provide suboptimal yet feasible evasive actions within tight computational limits.
- Context-aware obstacle reasoning: Incorporating semantic perception, such as object type and behavior prediction, to dynamically adjust the MPC cost function or safety constraints.
- Multi-agent evasion strategies: Cooperative collision avoidance leverages shared situational awareness and anticipates the interactive maneuvers of surrounding agents.
5.2. Robust, Transparent, and Comfort-Aware Trajectory Tracking
Trajectory tracking methods need to evolve, balancing accuracy, robustness, and passenger comfort. Key future priorities include:
- Integrated comfort–safety formulations: These should penalize jerk, yaw rate, or lateral acceleration while still enforcing strict tracking and obstacle avoidance constraints.
- Certified learning-enhanced MPC: Data-driven models like Gaussian Processes or neural networks should be verified using barrier certificates, Lyapunov functions, or reachability analysis to guarantee safety and convergence.
- Multi-timescale adaptive MPC: Capable of adjusting model fidelity and prediction detail according to factors like road type, speed, or situational complexity.
- Data-driven personalization: Allowing tuning of tracking behavior based on vehicle characteristics or user preferences to enhance human-machine interaction and ride comfort.
5.3. Scalable and Integrated Coordination Architectures
MPC-based coordination for tasks like lane merging, intersection management, and multi-vehicle interaction needs to scale effectively in dense, mixed-traffic settings. Important future directions are:
- Distributed and event-triggered multi-agent MPC: Designed with provable guarantees on feasibility, stability, and convergence, even under asynchronous or lossy communication channels.
- Mixed-autonomy-aware coordination: Taking into account the unpredictable behaviors of human-driven vehicles interacting with cooperative autonomous vehicles in shared environments.
- Contract-based and hierarchical co-optimization: Combining high-level route or mission planning with low-level constraint enforcement across diverse agents.
- Unified coordination and tracking stacks: Jointly optimizing safety, efficiency, and comfort using shared prediction models and interoperable planning layers.
6. Conclusion
This systematic review examined the role of Model Predictive Control (MPC) in enhancing safety functions for autonomous vehicles (AVs), with emphasis on three primary domains: collision avoidance and risk mitigation, trajectory tracking and path following, and intersection and coordination. A total of 38 peer-reviewed studies were analyzed and categorized by control objectives rather than algorithmic families, enabling a functional, application-oriented synthesis of the literature.
In collision avoidance, the reviewed studies span constraint-based geometric formulations, nonlinear MPC for evasive maneuvers, and risk-sensitive methods incorporating reachability and uncertainty modeling. While effective in simulation, these approaches often struggle with real-time computation, non-convex obstacle representation, and limited anticipation of human-agent interactions. For trajectory tracking, MPC has shown strong performance in maintaining path adherence under dynamic and safety constraints. Advances include robust MPC, learning-enhanced tracking with Gaussian Processes, and adaptive control frameworks. However, trade-offs between accuracy, robustness, and comfort remain unresolved. Comfort metrics such as jerk or lateral acceleration are often secondary objectives rather than co-optimized with safety, and formal guarantees for learning-based models are still rare. In intersection and coordination tasks, MPC approaches range from centralized to distributed schemes for merging, platooning, and intersection scheduling. Key tools include event-triggered communication, hierarchical planning, and contract-based negotiation. However, scalability, communication reliability, and seamless integration of planning with tracking remain unresolved challenges.
Across all three domains, key cross-cutting limitations include limited uncertainty integration, weak system-level coordination, poor scalability in real-time deployment, and underexplored comfort–safety trade-offs. These issues, detailed in Section 4, are addressed in Section 5 through proposed directions such as hybrid robust–learning MPC, anytime solvers, certified learning-based control, and unified coordination–tracking architectures. The key contribution of this review is its thematic framework, which organizes MPC strategies around core safety objectives rather than algorithmic families. This perspective clarifies how MPC is applied across AV safety tasks, highlights shared technical challenges, and identifies opportunities for integration. The review serves both as a technical roadmap for advancing MPC design and as a system-level reference for embedding MPC in safety-critical AV architectures.
Author Contributions
Conceptualization, A.M.; methodology, A.M.; software, A.M.; formal analysis, A.M.; resources, A.M.; writing—original draft preparation, A.M.; validation, R.S.; writing—review and editing, R.S.; supervision, R.S.; project administration, R.S.; funding acquisition, R.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding. The Article Processing Charge (APC) was waived by the publisher (MDPI).
Data Availability Statement
The original contributions presented in the study are included in the article; further inquiries can be directed to the corresponding author.
Acknowledgments
The authors would like to thank the editorial office of Machines for granting a full waiver of the Article Processing Charge (APC).
Conflicts of Interest
The authors declare no conflicts of interest.
References
- M. Ammour, R. Orjuela, and M. Basset, “A MPC Combined Decision Making and Trajectory Planning for Autonomous Vehicle Collision Avoidance,” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 12, pp. 24805–24817, 2022. [CrossRef]
- 2. J. Wang, S. Gong, S. Peeta, and L. Lu, “A real-time deployable model predictive control-based cooperative platooning approach for connected and autonomous vehicles,” Transp. Res. Part B Methodol., vol. 128, pp. 271–301, Oct. 2019. [CrossRef]
- S. Arrigoni et al., “Autonomous vehicle controlled by safety path planner with collision risk estimation coupled with a non-linear MPC,” DYNAMICS OF VEHICLES ON ROADS AND TRACKS, no. 24th Symposium of the International-Association-for-Vehicle-System-Dynamics (IAVSD). pp. 199–208, 2016.
- D. Phan et al., “Cascade Adaptive MPC with Type 2 Fuzzy System for Safety and Energy Management in Autonomous Vehicles: A Sustainable Approach for Future of Transportation,” SUSTAINABILITY, vol. 13, no. 18, 2021. [CrossRef]
- 5. M. Ammour, R. Orjuela, and M. Basset, “Collision avoidance for autonomous vehicle using MPC and time varying Sigmoid safety constraints,” IFAC PAPERSONLINE, vol. 54, no. 6th IFAC Conference on Engine Powertrain Control, Simulation and Modeling (E-COSM). pp. 39–44, 2021. [CrossRef]
- H. J. Yang, Y. Q. He, Y. Xu, and H. Zhao, “Collision Avoidance for Autonomous Vehicles Based on MPC With Adaptive APF,” IEEE Trans. Intell. Veh., vol. 9, no. 1, pp. 1559–1570, 2024. [CrossRef]
- 7. D. Dong, H. T. Ye, W. G. Luo, J. Y. Wen, and D. Huang, “Collision Avoidance Path Planning and Tracking Control for Autonomous Vehicles Based on Model Predictive Control,” SENSORS, vol. 24, no. 16, 2024. [CrossRef]
- M. Ibrahim, M. Kögel, C. Kallies, and R. Findeisen, “Contract-based Hierarchical Model Predictive Control and Planning for Autonomous Vehicle,” IFAC-PapersOnLine, vol. 53, no. 2, pp. 15758–15764, 2020. [CrossRef]
- N. T. Hung and A. M. Pascoal, “Cooperative Path Following of Autonomous Vehicles with Model Predictive Control and Event Triggered Communications⁎⁎This research was supported in part by the Marine UA project under the Marie Curie Sklodowska grant agreement No 642153, the H2020 EU Marin,” IFAC-PapersOnLine, vol. 51, no. 20, pp. 562–567, 2018. [CrossRef]
- Y. H. Song and K. Huh, “Driving and steering collision avoidance system of autonomous vehicle with model predictive control based on non-convex optimization,” Adv. Mech. Eng., vol. 13, no. 6, 2021. [CrossRef]
- S.-L. Lin and B.-C. Lin, “Enhancing Safety in Autonomous Vehicle Navigation: An Optimized Path Planning Approach Leveraging Model Predictive Control,” Comput. Mater. Contin., vol. 80, no. 3, pp. 3555–3572, 2024. [CrossRef]
- 12. J. R. Wang, Y. B. Guo, Q. F. Wang, J. Gao, Y. M. Chen, and IEEE, “Event-triggered MPC for Collision Avoidance of Autonomous Vehicles Considering Trajectory Tracking Performance,” in 2022 International Conference on Advanced Robotics and Mechatronics (ICARM), 2022, pp. 514–520. [CrossRef]
- 13. H. Chen, Q. Liu, D. Sun, S. Yu, and H. Chen, “Fast Model Predictive Control Trajectory Tracking for Autonomous Vehicles Based on BFGS Interior Point Method,” IFAC-PapersOnLine, vol. 58, no. 29, pp. 433–438, 2024. [CrossRef]
- 14. S. Yu, B. Chen, I. M. Jaimoukha, and S. A. Evangelou, “Game-Theoretic Model Predictive Control for Safety-Assured Autonomous Vehicle Overtaking in Mixed-Autonomy Environment,” in 2024 European Control Conference (ECC), 2024, pp. 3728–3733. [CrossRef]
- 15. T. Z. Fu, H. H. Nguyen, R. Findeisen, and IEEE, “Guaranteed Collision Avoidance for Autonomous Vehicles Fusing Model Predictive Control and Data Driven Reachability Analysis,” in 2024 EUROPEAN CONTROL CONFERENCE, ECC 2024, 2024, pp. 2286–2291. [CrossRef]
- 16. M. Ibrahim, J. Matschek, B. Morabito, and R. Findeisen, “Hierarchical Model Predictive Control for Autonomous Vehicle Area Coverage,” IFAC-PapersOnLine, vol. 52, no. 12, pp. 79–84, 2019. [CrossRef]
- 17. L. Xiong, M. Liu, X. Yang, B. Leng, and IEEE, “Integrated Path Tracking for Autonomous Vehicle Collision Avoidance Based on Model Predictive Control With Multi-constraints,” 2022 IEEE 25TH INTERNATIONAL CONFERENCE ON INTELLIGENT TRANSPORTATION SYSTEMS (ITSC), no. IEEE 25th International Conference on Intelligent Transportation Systems (ITSC). pp. 554–561, 2022. [CrossRef]
- 18. C. Ko, S. Han, M. Choi, and K.-S. Kim, “Integrated Path Planning and Tracking Control of Autonomous Vehicle for Collision Avoidance based on Model Predictive Control and Potential Field,” in 2020 20th International Conference on Control, Automation and Systems (ICCAS), 2020, pp. 956–961. [CrossRef]
- Z. Zhang, J. Qin, S. Tan, and H. Luo, “Lane change trajectory planning based on improved model predictive control with artificial potential field for autonomous vehicles in medium-high speed scenarios,” Eng. Appl. Artif. Intell., vol. 150, p. 110601, 2025. [CrossRef]
- S. Cheng, L. Li, H. Q. Guo, Z. G. Chen, and P. Song, “Longitudinal Collision Avoidance and Lateral Stability Adaptive Control System Based on MPC of Autonomous Vehicles,” IEEE Trans. Intell. Transp. Syst., vol. 21, no. 6, pp. 2376–2385, 2020. [CrossRef]
- 21. J. Nan, Z. Ge, X. Ye, A. F. Burke, and J. Zhao, “Model predictive control for autonomous vehicle path tracking through optimized kinematics,” Results Eng., vol. 24, p. 103123, Dec. 2024. [CrossRef]
- 22. Y. Mizushima, I. Okawa, and K. Nonaka, “Model Predictive Control for Autonomous Vehicles with Speed Profile Shaping,” IFAC-PapersOnLine, vol. 52, no. 8, pp. 31–36, 2019. [CrossRef]
- A. Mihály, Z. Farkas, and P. Gáspár, “Model Predictive Control for the Coordination of Autonomous Vehicles at Intersections,” IFAC-PapersOnLine, vol. 53, no. 2, pp. 15174–15179, 2020. [CrossRef]
- 24. N. Awad, A. Lasheen, M. Elnaggar, and A. Kamel, “Model predictive control with fuzzy logic switching for path tracking of autonomous vehicles,” ISA Trans., vol. 129, pp. 193–205, 2022. [CrossRef]
- 25. J. Bethge, M. Pfefferkorn, A. Rose, J. Peters, and R. Findeisen, “Model Predictive Control with Gaussian-Process-Supported Dynamical Constraints for Autonomous Vehicles,” IFAC-PapersOnLine, vol. 56, no. 2, pp. 507–512, 2023. [CrossRef]
- Y. Jiang, Z. Man, K. Xia, Y. Wu, Y. Wang, and Z. Yao, “Model predictive control–based cooperative lane-changing strategy for connected autonomous vehicle platoons merging into dedicated lanes,” Expert Syst. Appl., vol. 278, p. 127274, 2025. [CrossRef]
- 27. X. Sun, Y. Cai, S. Wang, X. Xu, and L. Chen, “Optimal control of intelligent vehicle longitudinal dynamics via hybrid model predictive control,” Rob. Auton. Syst., vol. 112, pp. 190–200, 2019. [CrossRef]
- M. Elsisi, “Optimal design of adaptive model predictive control based on improved GWO for autonomous vehicle considering system vision uncertainty,” Appl. Soft Comput., vol. 158, p. 111581, 2024. [CrossRef]
- H. Chen and X. Zhang, “Path Planning for Intelligent Vehicle Collision Avoidance of Dynamic Pedestrian Using Att-LSTM, MSFM, and MPC at Unsignalized Crosswalk,” IEEE Trans. Ind. Electron., vol. 69, no. 4, pp. 4285–4295, 2022. [CrossRef]
- 30. M. N. Nikkhah, A. Khastavan, and A. Nahvi, “Nonlinear Model Predictive Control for High-Speed Collision Avoidance in Autonomous Vehicles,” in 2023 11th RSI International Conference on Robotics and Mechatronics (ICRoM), IEEE, Dec. 2023, pp. 769–775. [CrossRef]
- 31. B. Zarrouki, J. Nunes, and J. Betz, “R2NMPC_ A Real-Time Reduced Robustified Nonlinear Model Predictive Control with Ellipsoidal Uncertainty Sets for Autonomous Vehicle Motion Control,” IFAC-PapersOnLine, vol. 58, no. 18, pp. 309–316, 2024. [CrossRef]
- N. T. Hung, N. Crasta, D. Moreno-Salinas, A. M. Pascoal, and T. A. Johansen, “Range-based target localization and pursuit with autonomous vehicles: An approach using posterior CRLB and model predictive control,” Rob. Auton. Syst., vol. 132, p. 103608, 2020. [CrossRef]
- W. Zhao, H. Wei, Q. Ai, N. Zheng, C. Lin, and Y. Zhang, “Real-time model predictive control of path-following for autonomous vehicles towards model mismatch and uncertainty,” Control Eng. Pract., vol. 153, p. 106126, 2024. [CrossRef]
- 34. C. Philippe, L. Adouane, B. Thuilot, A. Tsourdos, and H.-S. Shin, “Safe and Online MPC for Managing Safety and Comfort of Autonomous Vehicles in Urban Environment,” in 2018 21st International Conference on Intelligent Transportation Systems (ITSC), 2018, pp. 300–306. [CrossRef]
- B. Škugor et al., “Safety Manifold for Stochastic Model Predictive Control of an Autonomous Vehicle Approaching Unsignalized Crosswalks with Pedestrians,” in 2024 INTERNATIONAL CONFERENCE ON SMART SYSTEMS AND TECHNOLOGIES, SST, E. Nyarko, T. Matic, R. Cupec, and M. Vranjes, Eds., 2024, pp. 279–285. [CrossRef]
- C. Hu, Y. Xie, L. Xie, and M. Magno, “Sparse Gaussian process-based strategies for two-layer model predictive control in autonomous vehicle drifting,” Transp. Res. Part C Emerg. Technol., vol. 174, p. 105065, 2025. [CrossRef]
- 37. M. Soliman, B. Morabito, and R. Findeisen, “Towards Safe Exploration for Autonomous Vehicles using Dual Model Predictive Control,” IFAC-PapersOnLine, vol. 55, no. 27, pp. 387–392, 2022. [CrossRef]
- Y. Wang, Z. Liu, Z. Zuo, Z. Li, L. Wang, and X. Luo, “Trajectory Planning and Safety Assessment of Autonomous Vehicles Based on Motion Prediction and Model Predictive Control,” IEEE Trans. Veh. Technol., vol. 68, no. 9, pp. 8546–8556, 2019. [CrossRef]
- 39. D. Shen, Y. Chen, L. Li, and J. Hu, “Trajectory Tracking for Autonomous Vehicles Using Robust Model Predictive Control,” IFAC-PapersOnLine, vol. 58, no. 10, pp. 94–101, 2024. [CrossRef]
Figure 1.
PRISMA 2020 flow diagram.
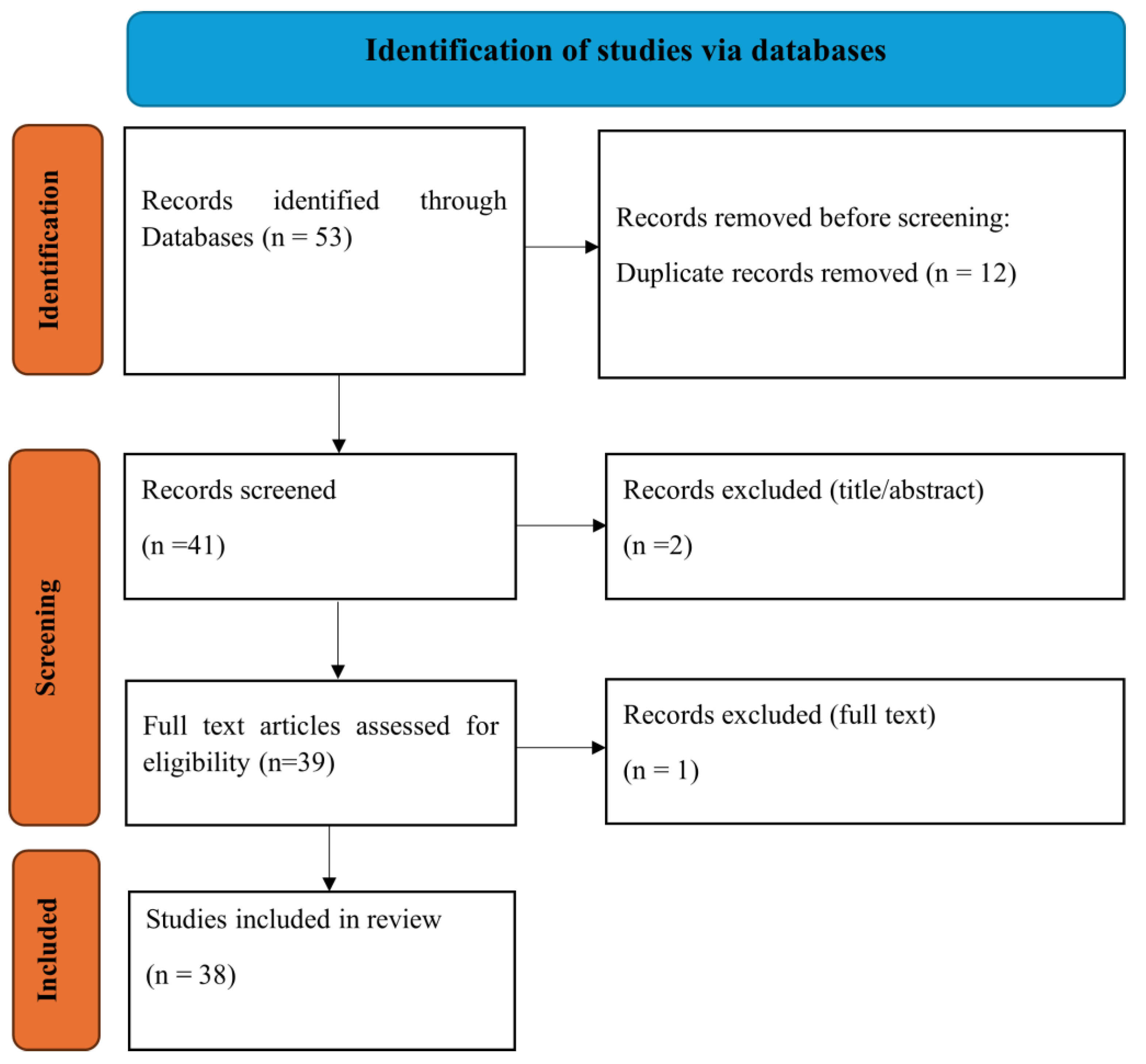
Figure 2.
Distribution of Reviewed Studies Across MPC-Based Safety Control Categories.
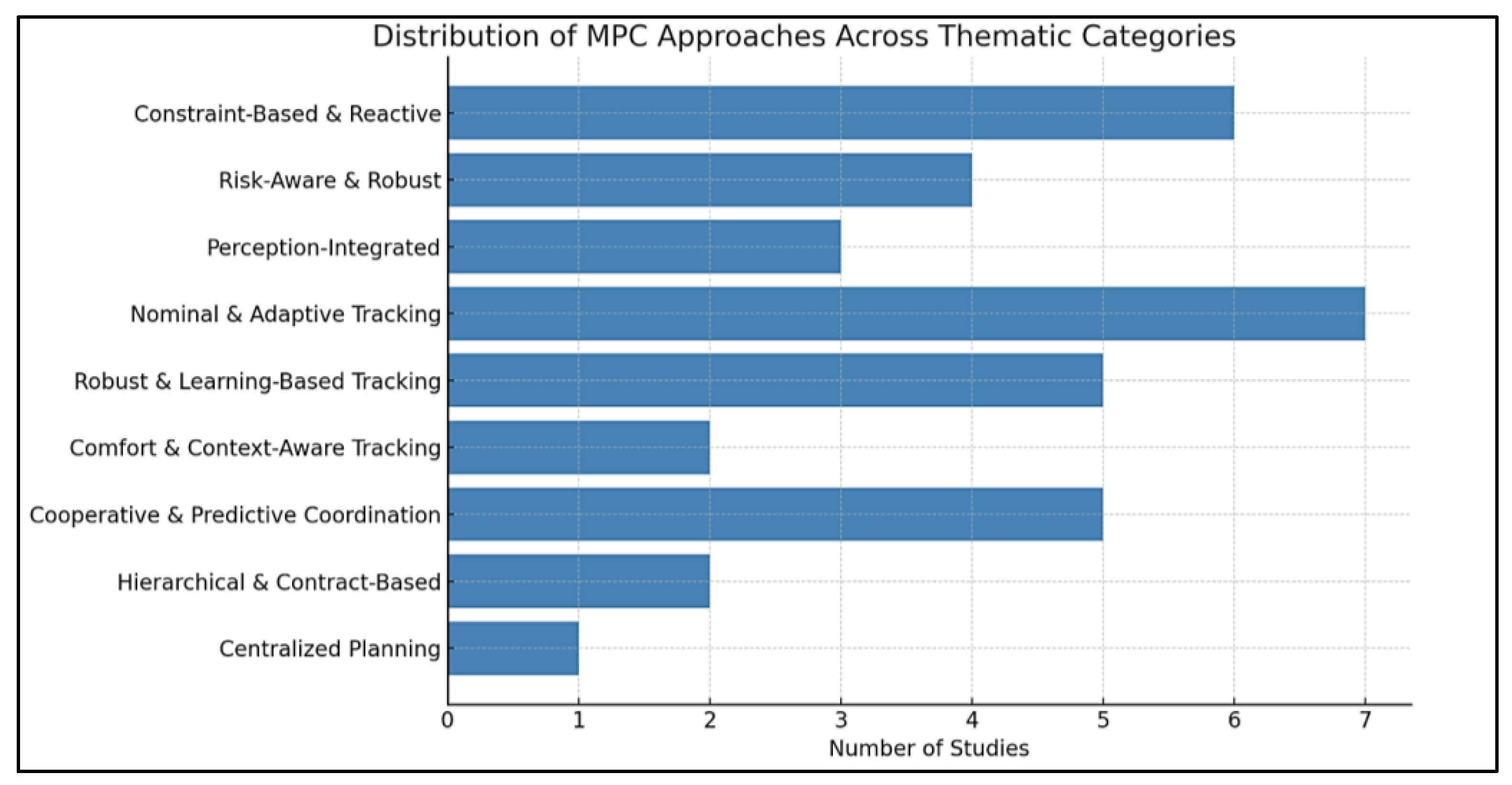

Table 1.
Thematic Coverage of Included Studies Across MPC Application Domains.
| Ref. | Collision Avoidance | Trajectory Tracking | Coordination | Ref. | Collision Avoidance | Trajectory Tracking | Coordination |
| [1] | ✓ | [2] | ✓ | ||||
| [3] | ✓ | [4] | Excluded | ||||
| [5] | ✓ | [6] | ✓ | ||||
| [7] | ✓ | [8] | ✓ | ||||
| [9] | ✓ | ✓ | [10] | ✓ | |||
| [11] | ✓ | [12] | ✓ | ||||
| [13] | ✓ | [14] | ✓ | ✓ | |||
| [15] | ✓ | ✓ | [16] | ✓ | |||
| [17] | ✓ | [18] | ✓ | ||||
| [19] [19] | ✓ | [20] | ✓ | ||||
| [21] | ✓ | [22] | ✓ | ||||
| [23] | ✓ | [24] | ✓ | ||||
| [25] | ✓ | ✓ | ✓ | [26] | ✓ | ||
| [27] | ✓ | [28] | ✓ | ||||
| [29] | ✓ | [30] | ✓ | ✓ | |||
| [31] | ✓ | [32] | ✓ | ||||
| [33] | ✓ | [34] | ✓ | ||||
| [35] | ✓ | [36] | ✓ | ✓ | |||
| [37] | ✓ | [38] | ✓ | ✓ | |||
| [39] | ✓ | ||||||
Table 2.
Summary of MPC Techniques for Collision Avoidance and Risk Mitigation.
| Approach | Technique / Method | Representative References | Control Objective |
| Constraint-Based and Reactive | Sigmoid/APF Safety Barriers | [5,6,18,19] | Geometric repulsion to enforce obstacle clearance |
| Time-Varying Obstacle Margins | [19] | Dynamic scaling of safety zones relative to obstacle motion | |
| Nonlinear MPC (NMPC) | [3,30] | Execute evasive actions under realistic vehicle dynamics | |
| Hard Safety Constraints | [1,10] | Enforce vehicle-boundary constraints in local maneuvering | |
| Risk-Aware and Robust Control | Monte Carlo Risk Estimation | [38] | Evaluate probability of collision across candidate paths |
| Reachability-Based MPC | [15] | Maintain invariant safe sets under bounded uncertainty | |
| Robust MPC (RMPC) | [14,35] | Guarantee safety under model mismatch and stochastic uncertainty | |
| Adaptive MPC | [17,36] | Adjust control model online based on environmental or system changes | |
| Perception-Enhanced Architectures | Pedestrian-Aware MPC (DL-based) | [29] | Forecast pedestrian intent for proactive avoidance |
| Game-Theoretic MPC | [14] | Predict and respond to other agents’ strategies in shared environments | |
| Dual-Layer MPC | [37] | Combine nominal control with independent safety override | |
| GP-Enhanced MPC | [25] | Learn residual dynamics for improved safety prediction | |
| Event-Triggered Collision Coordination | [9] | Manage collisions through decentralized planning under sparse communication |
Table 3.
Summary of MPC Techniques for Trajectory Tracking and Path Following.
| Approach | Technique / Method | Representative References | Control Objective |
| Nominal and Adaptive MPC | Linear/Nonlinear MPC | [11,12,13,20,22,30] | Real-time path tracking under nominal and nonlinear dynamics |
| Adaptive and Hybrid MPC | [27,28] | Adapt to changing dynamics, sensor noise, or system modes | |
| NMPC for Vehicle-Following | [7,21] | Maintain relative distance and track curvature in platooning scenarios | |
| Robust and Learning-Enhanced | Robust MPC (RMPC, LPV) | [31,33,39] | Maintain tracking under disturbances and parameter variation |
| Gaussian Process-Enhanced MPC | [25,36] | Compensate modeling error through learning-based residual correction | |
| Comfort and Context-Aware | Comfort-Aware MPC | [34] | Improve passenger comfort by minimizing jerk and yaw rate |
| Fuzzy Logic-Based Context Switching | [24] | Adapt tracking behavior to environmental or operational context | |
| Long-Range and Smooth Path Tracking | [32] | Improve stability and prediction for extended horizons |
Table 4.
Summary of MPC Techniques for Intersection and Coordination Tasks.
| Approach | Technique / Method | Representative References | Control Objective |
| Cooperative and Predictive Maneuvering | Cooperative MPC (C-MPC) | [2,26] | Synchronized lane changes and merging via trajectory sharing |
| Event-Triggered Coordination | [9] | Minimize communication by triggering only on significant deviation | |
| Game-Theoretic and Reachability MPC | [14,15] | Ensure safety in multi-agent environments through behavior prediction | |
| Hierarchical and Contract-Based Control | Hierarchical MPC for Intersection | [23] | Separate scheduling and control for scalable coordination |
| Contract-Based Hierarchical MPC | [8] | Ensure compatibility between planner and controller via constraint negotiation | |
| Centralized and Mission-Level Planning | Centralized multi-Agent MPC | [16] | Allocate and coordinate multi-vehicle tasks under a unified planning framework |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



