Submitted:
24 September 2025
Posted:
25 September 2025
Read the latest preprint version here
Abstract
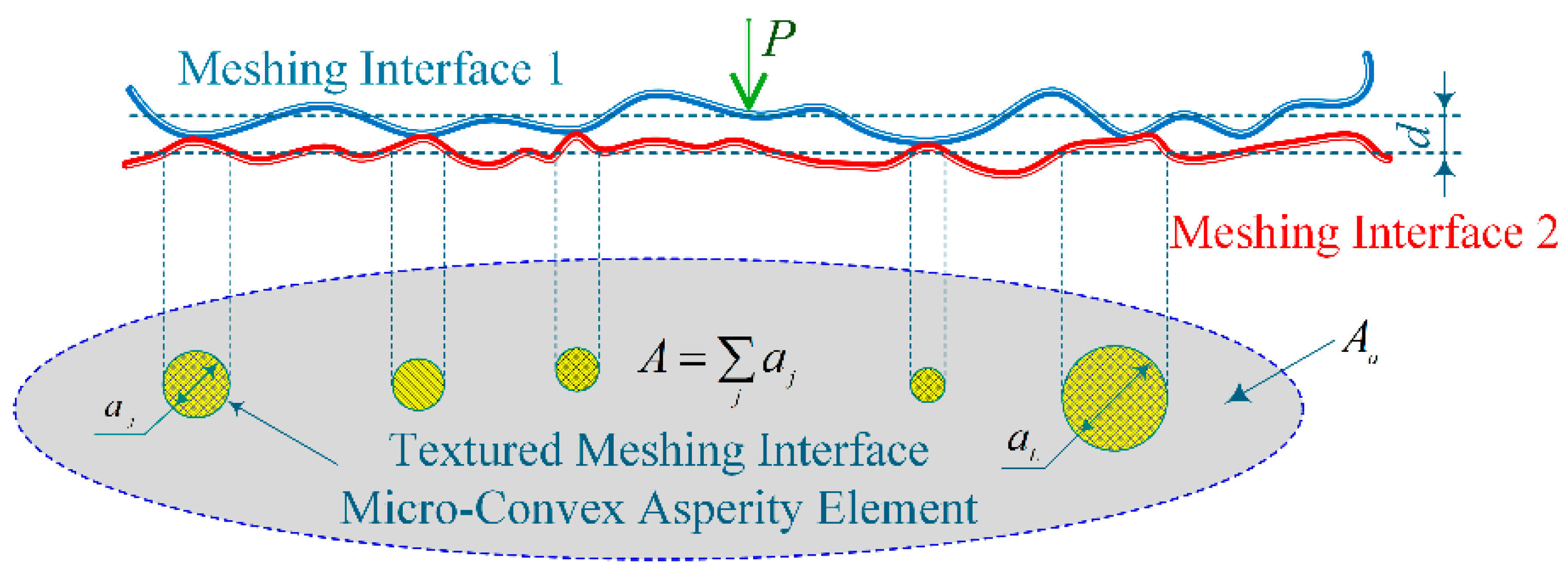
The line contact behavior of multiscale meshing interfaces necessitates synergistic investigation spanning nano- to centimeter-scale ranges. When nominally smooth gear teeth surfaces come into contact, the mechanical-thermal coupling effect at the meshing interface actually occurs over a collection of microscale asperities (roughness peaks) exhibiting hierarchical distribution characteristics. The emergent deformation phenomena across multiple asperity scales govern the self-organized evolution of interface conformity, thereby regulating both the load transfer efficiency and thermal transport properties within the contact zone. The fractal nature of the roughness topography on actual meshing interfaces calls for the development of a cross-scale theoretical framework that inte-grates micro-texture optimization with multi-physics coupling contact behavior. Conventional roughness characterization methods based on statistical parameters suffer from inherent limitations: their parameter values are highly dependent on measurement scale, lacking uniqueness under varying sampling intervals and instrument resolutions, and failing to capture the scale-invariant nature of meshing interface topography. In contrast, a scale-independent parameter system grounded in fractal geometry theory enables essential feature extraction and quantitative characterization of three-dimensional interface morphology. This study establishes a progressive deformation theory for gear line contact interfaces with fractal geometric characteristics, encompassing elastic, elasto-plastic transition, and fully plastic stages. By systematically investigating the force-thermal coupling mechanisms in textured meshing interfaces under multiscale conditions, the research provides a theoretical foundation and numerical implementation pathways for high-precision multiscale thermomechanical analysis of meshing interfaces.
Keywords:
1. Introduction
2. Multiscale Characterization of Real Meshing Interface Morphology
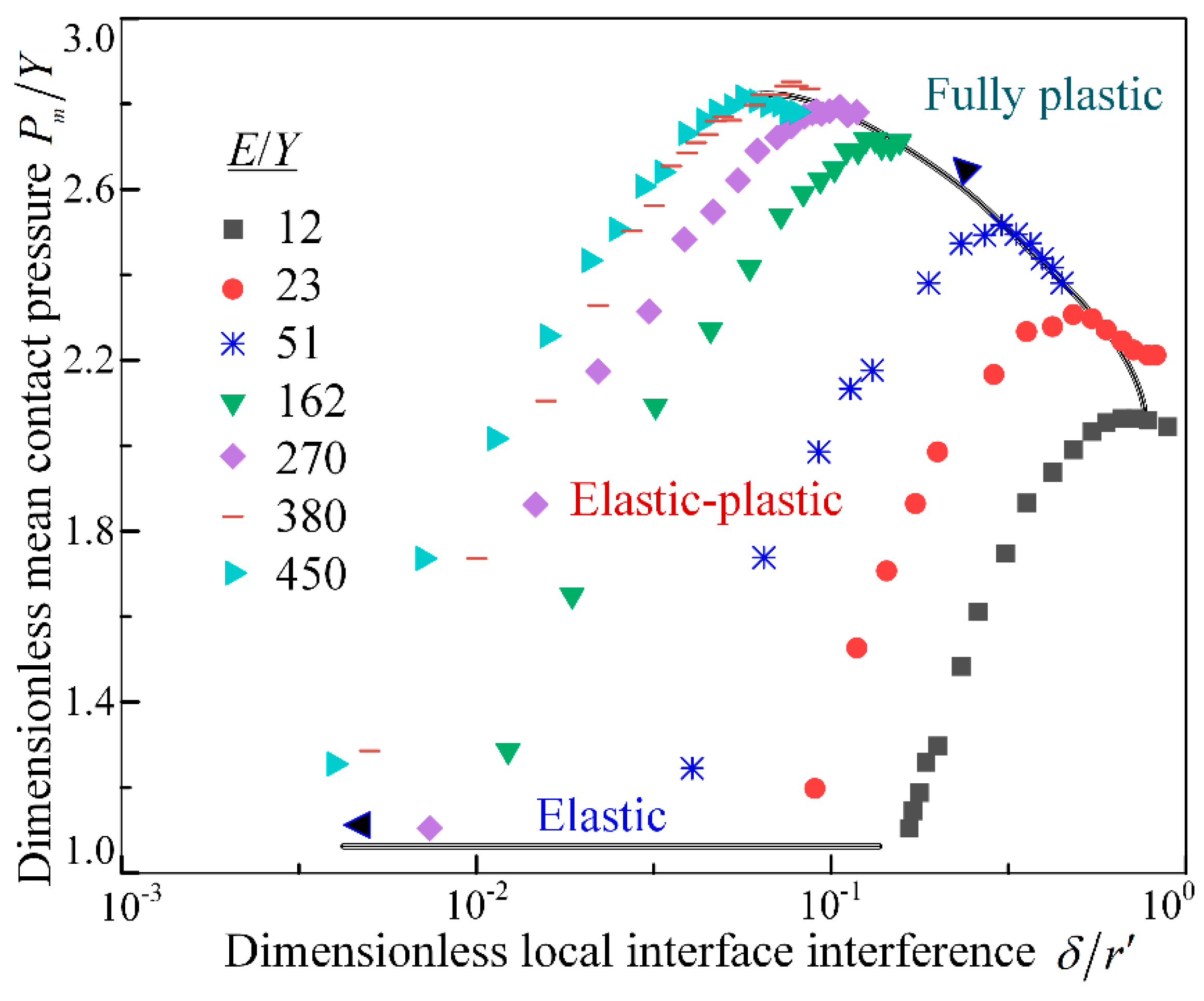
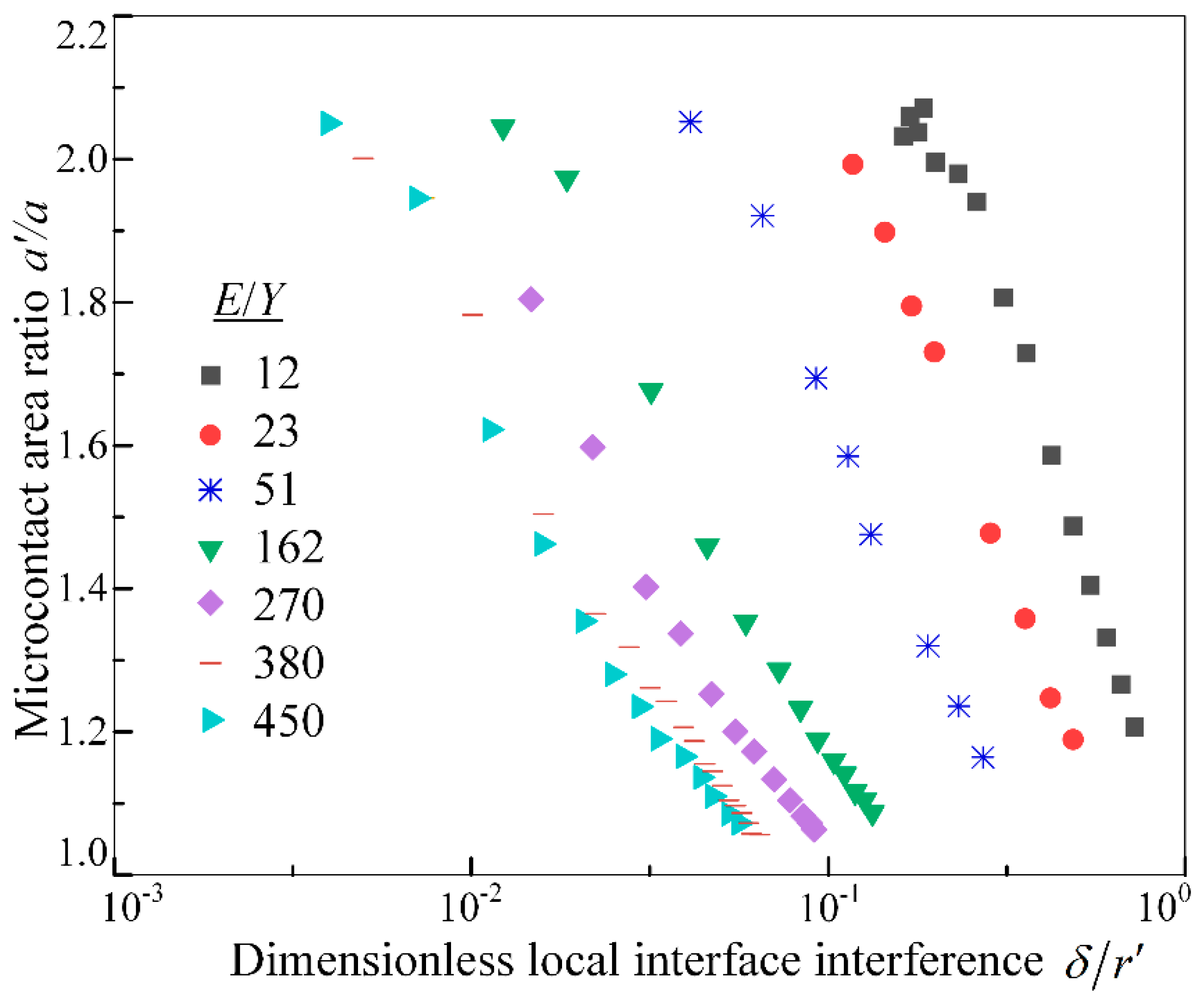
3. Multiscale Analysis of Meshing Interface Micro-Asperity Contact Mechanics Characteristics
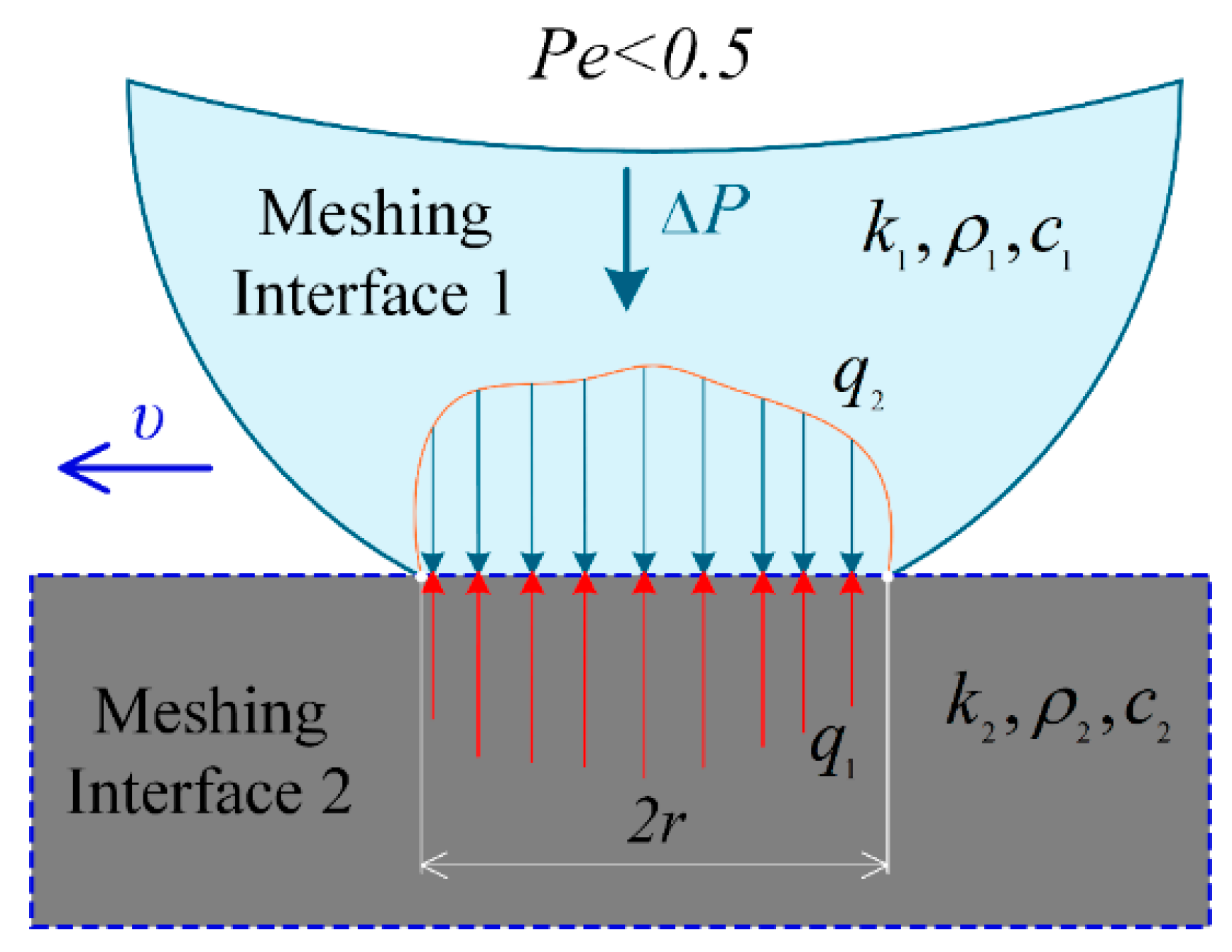
4. Multiscale Thermomechanics Characteristics Analysis of Meshing Interface Micro-Asperity Contact
5. Analysis of Meshing Load-Bearing Characteristics of Textured Interface Considering Fractal Dimension
6. Discussion of the Results
7. Conclusion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgment
References
- Aggarwal, S.; Pandey, R. K. Frictional and load-carrying behaviours of micro-textured sector shape pad thrust bearing incorporating the cavitation and thermal effects. Lubrication Science, 2017, 29 (4), 255-277. [CrossRef]
- Sánchez, M.B.; Pleguezuelos, M.; Pedrero, J. Strength model for bending and pitting calculations of internal spur gears. Mechanism and Machine Theory. 2019, 133, 691-705. [CrossRef]
- Croccolo, D.; De Agostinis, M.; Olmi, G.; Vincenzi, N. A Practical Approach to Gear Design and Lubrication: A Review. Lubricants. 2020, 8(9), 84. [CrossRef]
- Özdemir, M.N.; Kılıç, V.; Ünlüsoy, Y.S. A new contact & slip model for tracked vehicle transient dynamics on hard ground. Journal of Terramechanics. 2017, 73, 3-23. [CrossRef]
- Wang, W.; He, Y. Y.; Zhao, J.; Mao, J, Y.; Hu, Y. T.; Luo, J. B. Optimization of groove texture profile to improve hydrodynamic lubrication performance: Theory and experiments. Friction. 2020, 8, 83-94. [CrossRef]
- Marques, P.M.T.; Marafona, J.D.M.; Martins, R.C.; Seabra, J.H.O. A continuous analytical solution for the load sharing and friction torque of involute spur and helical gears considering a non-uniform line stiffness and line load. Mechanism and Machine Theory. 2021, 161, 104320. [CrossRef]
- Wang, Y.; Azam, A.; Zhang, G.; Dorgham, A.; Liu, Y.; Wilson, M.C.T.; Neville A. Understanding the Mechanism of Load-Carrying Capacity between Parallel Rough Surfaces through a Deterministic Mixed Lubrication Model. Lubricants, 2022, 10(1), 12. [CrossRef]
- Petare, A.C.; Mishra, A.; Palani, A.; Jain, N.K. Study of laser texturing assisted abrasive flow finishing for enhancing surface quality and microgeometry of spur gears, The International Journal of Advanced Manufacturing Technology, 2019, 101, 785-799. [CrossRef]
- Liu, W.L.; Ni, H.J.; Wang, P.; Chen, H.L. Investigation on the tribological performance of micro-dimples textured surface combined with longitudinal or transverse vibration under hydrodynamic lubrication. International Journal of Mechanical Sciences. 2020, 174, 105474. [CrossRef]
- Chang, X.; Renqing, D.; Liao, L.; Zhu, P.; Lin, B.; Huang, Y.; Luo, S. 2023, “Study on hydrodynamic lubrication and friction reduction performance of spur gear with groove texture. Tribology International, 2023, 177, 107978. [CrossRef]
- Černe, B.; Petkovšek, M.; Duhovnik, J.; Tavčar, J. Thermo-mechanical modeling of polymer spur gears with experimental validation using high-speed infrared thermography. Mechanism and Machine Theory, 2024, 146, 103734. [CrossRef]
- Liang, X.H.; Zuo, M. J.; Feng, Z. P. Dynamic modeling of gearbox faults: A review. Mechanical Systems and Signal Processing. 2018, 98, 852-876. [CrossRef]
- Ammosov, L.; Mönkkönen, K.; Suvanto, M. Precise fabrication of microtextured stainless steel surfaces using metal injection moulding. Precision Engineering, 2020, 62, 89-94. [CrossRef]
- Zhao, J.; Hou, L.; Li, Z.; Zhang, H.; Zhu, R. Prediction of tribological and dynamical behaviors of spur gear pair considering tooth root crack. Engineering Failure Analysis, 2022, 135, 106145. [CrossRef]
- Brown, C.; Nescio, M.; Chadha, V.; Zheng, C.; Abelev, E.; Chmielus, M.; Jacobs, T. The Difficulty of Measuring Surface Topography in Additive Manufacturing: A Comparison Between Measured and True Surface Features of Binder-Jet Printed Samples. Journal of Tribology, March 18, 2025, 1-24 (24 pages). [CrossRef]
- Rosenkranz, A.; Grützmacher, P.G.; Gachot, C.; Costa, H.L. Surface texturing in machine elements-A critical discussion for rolling and sliding contacts. Advanced Engineering Materials, 2019, 21, 1900194. [CrossRef]
- Wang, X.G.; An, S.Y.; Wang, Y.M.; Ruan, J.F.; Ji, S.E. TEM fitting considering TEPs of contact interface of meshing gear. Journal of Mechanical Science and Technology, 2021, 35(10), 4443-4457. [CrossRef]
- Sivayogan, G.; Dolatabadi, N.; Johns-Rahnejat, P.; Rahmani, R.; Rahnejat, H. Non-Newtonian Thermo-Elastohydrodynamics and Sub-Surface Stress Field of High-Performance Racing Spur Gears. Lubricants. 2022, 10(7), 146. [CrossRef]
- Xing, Y.Q.; Li, X.; Hu, R.Y.; Long, X.Y.; Wu, Z.; Liu, L. Numerical analyses of rectangular micro-textures in hydrodynamic lubrication regime for sliding contacts. Meccanica, 2019, 56, 365-382. [CrossRef]
- Rajput, H.; Atulkar, A.; Porwal, R. Optimization of the surface texture on piston ring in four-stroke IC engine. Materials Today: Proceedings, 2021, 44(Part 1), 428-433. [CrossRef]
- Zhang, N.; Zhai, W.; Yin, S.; Chen, S.; Xia, J.; Luan, L.; Zhai, A. Deep-sea soft soil and deep-sea mining vehicle interaction: From soil properties to locomotion performance. Applied Ocean Research. 2025, 154, 104372. [CrossRef]
- Li, Z.; Xiao, H.; Tang, Y.; Liang, G.; Wang, L.; Yang, J. A deterministic model of surface profile degradation for evaluating time-varying mesh stiffness and dynamic responses of spur gear considering tooth surface wear evolution. Mechanical Systems and Signal Processing, 2025, 225, 112313. [CrossRef]
- Gupta, N.; Tandon, N.; Pandey, P.K.; Vidyasagar, K.E.Ch.; Kalyanasundaram, D. Tribodynamic studies of textured gearsets lubricated with fresh and MoS2 blended greases. Tribology International, 2022, 165, 107247. [CrossRef]
- Wang, X.G.; Huang, H.; Song, J.Y.; Wang, Y.M.; Ruan, J.F. Numerical Analysis of Friction Reduction and ATSLB Capacity of Lubricated MTMI with Textured Micro-Elements. Lubricants, 2023, 11(2), 78. [CrossRef]
- Wos, S.; Koszela, W.; Pawlus, P. Comparing tribological effects of various chevron-based surface textures under lubricated unidirectional sliding. Tribology International, 2020, 146, 106205. [CrossRef]
- Sivayogan, G.; Dolatabadi, N.; Johns-Rahnejat, P.; Rahmani, R.; Rahnejat, H. Non-Newtonian Thermo-Elastohydrodynamics and Sub-Surface Stress Field of High-Performance Racing Spur Gears. Lubricants, 2022, 10(7), 146. [CrossRef]
- Yang, Y.; Tang, J.; Hu, N.; Shen, G.; Li, Y.; Zhang, L. Research on the time-varying mesh stiffness method and dynamic analysis of cracked spur gear system considering the crack position. Journal of Sound and Vibration. 2023, 548, 117505. [CrossRef]
- Kaneta, M.; Matsuda, K.; Nishikawa, H. The Causes of Asymmetric Deformation of Surface Roughness Asperities in Elastohydrodynamic Lubrication Contacts. Journal of Tribology, 2022, 144(6), 061601 (12 pages). [CrossRef]
- Cheng, G.; Ma, J.; Li, J.; Sun, K.; Wang, K.; Wang, Y. Study on the Dynamic Characteristics of Gears Considering Surface Topography in a Mixed Lubrication State. Lubricants, 2024, 12(1), 7. [CrossRef]
- Mu, X.K.; Sun, W.; Liu, C.; Wang, Y.L.; Yuan, B.; Sun, Q.C. Study on rough surfaces: A novel method for high-precision simulation and interface contact performances analysis. Precision Engineering, 2022, 73, 11-22. [CrossRef]
- Li, C.; Qiu, X.; Yu, Z.; Li, S.; Niu, Q.; Kurniawan, R.; Ko, T. Novel Environmentally Friendly Manufacturing Method for Micro-Textured Cutting Tools. International Journal of Precision Engineering and Manufacturing-Green Technology. 2021, 8, 193-204. [CrossRef]
- Cao, P.; Li, Q.; Feng, K.; Qin, Y. Dynamic modeling of spur gear transmission system with evolutive coupling fault of fatigue crack and wear. Engineering Failure Analysis. 2024, 156, 107820. [CrossRef]
- Wu, J.P.; Yang, C.B.; Liu, C.; Wang, Y.L.; Zhang, H.S.; Wang, L.Y.; Li, H.Y. Numerical analysis of micro-textured friction element interface temperature fields under mixed lubrication, International Communications in Heat and Mass Transfer, 2025, 163, 108743. [CrossRef]
- Ding, H.; Zhang, W.Z.; Wu, H.; Chen, T.; Li, S.; Li, H.; Zhou, Z.; Hu, X. Multi-field coupling lubrication interface heat transfer model for hypoid gear transmission. International Communications in Heat and Mass Transfer, 2024, 154, 107451. [CrossRef]
- Li, Z.H.; Jiang, M.J.; Guo, X.H.; Zhang, K.D. Improving the frictional properties of the tool/chip interface of micro-textured ceramics tools by using electromagnetic-assisted nanofluids. Materials Today Communications, 2024, 39, 109017. [CrossRef]
- Di, J.; Fan, Z.; Zhang, H.; Wang, C.; Wang, J.; Peng, C. Numerical and experimental studies of cavitation damage characteristics of 17-4PH stainless steel under array groove structure. Journal of Tribology, April 9, 2025, 1-29 (29 pages). [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



