Submitted:
20 August 2025
Posted:
21 August 2025
You are already at the latest version
Abstract
This paper proposes a finite-time adaptive observer with online disturbance learning for time-varying disturbed systems. By integrating parameter-dependent Lyapunov functions and slack matrix techniques, the method eliminates conservative static disturbance bounds required in prior work while guaranteeing fixed-time convergence. A power systems case study demonstrates 62% faster convergence and 63% lower steady-state error compared to [1], validated through LMI-based synthesis and adaptive disturbance
estimation.
Keywords:
fixed-time observer
; online disturbance learning
; reduced conservatism LMIs
; parameter dependent Lyapunov functions
; adaptive estimation
; power systems
; nonlinear adaptive control
; Slack matrix design
; Grid-based synthesis
; Transient performance
1. Introduction
Modern control systems increasingly require robust state and parameter estimation capabilities to handle complex operational environments characterized by time-varying parameters and external disturbances. The fundamental challenge of designing adaptive observers for disturbed systems has attracted sustained attention in control theory, driven by applications ranging from power systems [1] to robotic exoskeletons [2]. Traditional approaches to this problem, while effective under certain constraints, often rely on conservative design assumptions that limit their practical applicability in real-world scenarios characterized by unknown disturbance bounds and time-critical performance requirements.
The persistent excitation paradigm [1] has served as a cornerstone for observer design in linear regression models, enabling asymptotic convergence under bounded disturbance assumptions. However, recent advances in fixed-time stability theory [3] and linear matrix inequality (LMI) techniques [4] have revealed opportunities to overcome the limitations of conventional asymptotic observers. Contemporary research demonstrates growing interest in combining parameter-dependent Lyapunov functions with slack variable techniques to reduce conservatism in control synthesis [5,6]. This paradigm shift responds to the critical need for estimation algorithms that guarantee prescribed performance characteristics while maintaining computational tractability.
Existing LMI-based observer designs [1,7] typically require a priori knowledge of disturbance bounds and employ fixed diagonal gain matrices, leading to suboptimal noise amplification characteristics. The recent work of de Oliveira et al. [8] on robust performance margin evaluation highlights the importance of adaptive gain mechanisms in handling unmodeled dynamics, while Wan et al. [9] demonstrate the effectiveness of finite-time synchronization techniques in networked systems. These developments suggest that integrating adaptive disturbance estimation with fixed-time convergence mechanisms could significantly enhance observer performance in practical applications.
The proposed methodology builds on three fundamental advancements in modern control theory: First, the fixed-time stability framework established by Polyakov [3], which provides theoretical guarantees for convergence within user-defined time horizons. Second, the LMI-based control synthesis techniques pioneered by Boyd et al. [4], recently extended to handle polytopic uncertainties [10] and actuator saturation [9]. Third, the emerging paradigm of parameter-dependent Lyapunov functions [5,6] that enables less conservative stability analysis for time-varying systems. By synthesizing these elements with novel disturbance learning mechanisms, this work addresses critical gaps in existing observer designs.
Recent applications in diverse domains underscore the practical relevance of advanced observer designs. In power systems, Reihani et al. [10] demonstrate the effectiveness of LMI approaches for handling renewable energy uncertainties, while Kiruthika and Manivannan [11] showcase finite-time synchronization techniques in neural networks. Robotics applications [2] further highlight the need for robust estimation algorithms that maintain performance under real-world disturbances. These developments motivate our focus on creating an observer framework that combines the computational rigor of LMI methods [12] with the transient performance guarantees of fixed-time stability theory [3].
The principal contributions of this work address three fundamental limitations in existing observer designs: First, the elimination of static disturbance bounds through online learning mechanisms inspired by recent advances in adaptive control [13,14]. Second, the replacement of asymptotic convergence guarantees with fixed-time stability properties using nonlinear injection terms derived from fractional-order control theory [15,16]. Third, the reduction of conservatism in LMI synthesis through parameter-dependent Lyapunov functions and slack matrix techniques, building on recent developments in polytopic uncertainty handling [10] and switched system analysis [7].
Validation through comprehensive case studies in power systems [1,10] demonstrates the practical efficacy of the proposed observer. Comparative analysis reveals 62% faster convergence and 63% lower steady-state error compared to conventional LMI-based designs [1,4], while maintaining computational tractability through grid-based parameter discretization [6]. The theoretical framework builds on our previous work in fractional-order system observation [15] and nonlinear system analysis [17], extending these foundations to handle time-varying parameters and unmodeled dynamics.
The remainder of this paper is organized as follows: Section 2 establishes essential mathematical preliminaries and problem formulation. Section 3 details the proposed finite-time observer design with online disturbance learning. Section 4 presents the reduced-conservatism LMI synthesis methodology. Section 5 provides comparative analysis and practical implementation guidelines. Section 6 validates the approach through power system case studies. Section 7 concludes with recommendations for future research directions in adaptive observation and LMI-based control.
Notation
Throughout this paper, the following notation is adopted:
- : n-dimensional Euclidean space.
- : Euclidean norm for vectors; induced spectral norm for matrices.
- : Space of essentially bounded measurable functions.
-
: Sign-preserving power function for , .For vectors, .
- : Sequence of integers .
- : Identity matrix of size ; : Zero matrix of size .
- , : Minimum and maximum eigenvalues of a matrix.
- , : Class (strictly increasing, if unbounded) functions.
- : Augmented error vector (state/parameter/disturbance errors).
- : Parameter-dependent Lyapunov matrix in (9), where are time-varying parameters (e.g., , ).
- : Slack matrix in LMI constraint (10), introduced to decouple Lyapunov terms and reduce conservatism.
- N: Grid resolution for parameter discretization, chosen empirically based on parameter variability (see Algorithm 1).
- : Fixed-time convergence exponent in observer (4a).
- T: Predefined convergence time bound in Theorem 1.
- : Adaptive gain for disturbance estimation in (5).
- : Residual disturbance approximation error.
- : Uniform lower eigenvalue bound for .
| Algorithm 1 Grid-Based Gain Synthesis |
|
2. Preliminaries
Definition 1.
A system is fixed-time stable [3] if:
- 1.
- It is finite-time stable, i.e., as , where .
- 2.
- The settling time is bounded by a constant , independent of .
A PDLF , where is a time-varying parameter vector, is used to reduce conservatism in LMI-based designs. The matrix must satisfy:
where .
We introduce the following assumptions :
Assumption 1.
The disturbance is Lebesgue measurable and satisfies , where is an adaptive gain and is a small constant.
Assumption 2.
The regressor is persistently exciting (PE), i.e., :
Assumption 3.
The time derivative of the disturbance is Lebesgue measurable and satisfies , where is a known constant.
Remark 1.
The LMI synthesis (Section 5) ensures such that for all t, guaranteeing .
Assumption 4
(Bounded Scheduling Derivatives). The time derivatives of scheduling parameters are bounded:
where are known constants.
Assumption 5
(Uniform Positive Definiteness of ). There exists such that the parameter-dependent Lyapunov matrix satisfies:
3. Problem Statement
Consider the disturbed regression model:
with measurable, known, unknown time-varying, and disturbances. The observer design must overcome three limitations of [1]:
- Requirement of static disturbance bounds
- Asymptotic rather than fixed-time convergence
- Conservatism from diagonal gain matrices
We introduce a disturbance estimator and revise the model to:
where is the estimation error. The disturbance derivative satisfies (Assumption 3).
Objective: Design an observer that:
- Estimates and without static disturbance bounds
- Guarantees in fixed time T
- Synthesizes gains via reduced-conservatism LMIs
4. Finite-Time Observer Design with Online Disturbance Learning
Remark 2.
The term ensures fixed-time convergence, while mitigates chattering. The adaptive law (5) ensures (Lemma 1). The gains , trade off adaptation speed and noise sensitivity. Empirical guideline: .
Error Dynamics:
Theorem 1
(Fixed-Time Stability). Under Assumptions 1–3, and the additional boundedness condition:
- (A4)
- is bounded:
the error converges to zero in fixed time T if:
- 1.
- Gains satisfy parameter-dependent LMIs (Section 5)
- 2.
- ,
- 3.
Proof.
Consider the Lyapunov function:
where . The total derivative is:
Substitute from (6a):
Substitute from (6b):
Note: .
Substitute from (6c):
Substitute from (5):
Assemble all components and apply bounds:
where absorbs minor constants from approximation.
1. Bounded derivatives (A3,A4): ,
3. Significant inequalities:
After algebraic manipulation and gain selection:
Using and defining :
since dominates and V dominates .
By Polyakov’s lemma [3], convergence occurs within:
□
Lemma 1
(Boundedness of ). Under Assumptions 1, 2, and 5, the adaptive gain governed by:
satisfies with explicit bound:
where .
Proof. Step 1: Establish state error boundedness From Theorem 1, for all . By Assumption 5:
Step 2: Solve and bound the adaptive dynamics The solution to satisfies:
□
Remark 3.
The grid-based LMI synthesis (Algorithm 1) ensures uniform positive definiteness by including at all grid points .
5. Reduced-Conservatism LMI Synthesis
Represent error dynamics (6a)–(6c) linearly:
where , . The parameter-dependent Lyapunov matrix:
with (from Theorem 1).
LMI with Slack Matrix :
where decouples cross-terms, ensures decay, and with .
Remark 4.
The LMI constraint in (10) is strengthened to at all grid points to ensure Assumption 5 holds. This guarantees throughout system operation.
Remark 5.
Choose N based on parameter variability: for slow variations, for rapid changes. Computational complexity limits in practice.
6. Comparative Analysis
Methodology Comparison
Interpretations of Key Criteria
Convergence
- Fixed-Time (Proposed): Ensures by a predefined T, critical for time-sensitive applications (e.g., fault detection in power systems).
- Asymptotic ([1]): Guarantees as , which may be insufficient for real-time control.
Disturbance Handling
- Proposed: Eliminates need for static bounds via online estimator , adapting to unmodeled dynamics.
- [1]: Requires conservative overapproximation of disturbances, leading to high-gain observers.
Conservatism vs. Complexity
- Proposed: Parameter-dependent LMIs reduce conservatism but require solving LMIs. Suitable for .
- [1]: Diagonal LMIs () are computationally efficient but overdesign gains for worst-case scenarios.
Implementation
- Proposed: Requires offline grid-based LMI solving and real-time interpolation. Not scalable for .
- [1]: Simple diagonal gain synthesis, suitable for embedded systems with limited computation.
Practical Recommendations
-
Choose Proposed Observer If:
- –
- Fixed-time convergence is required (e.g., safety-critical systems).
- –
- Disturbance bounds are unknown or time-varying.
- –
- System dimension is low ().
-
Choose [1] If:
- –
- Asymptotic convergence suffices.
- –
- Disturbance bounds are known and static.
- –
- System dimension is high ().
Remark 6.
For systems with partial disturbance knowledge, hybridize both methods: use [1]’s diagonal LMIs for high-dimensional states and the proposed online estimator for critical parameters.
7. Simulation Results
Application to Power Systems
Consider the grid voltage model under unbalance conditions from [1]:
where:
- : Grid voltage with V (nominal)
- : Unknown time-varying parameter ( Hz nominal)
- : Disturbance (parasitic loads)
- : Time-varying frequency
Observer Implementation
Proposed Observer:
where balances fixed-time convergence ( s) and numerical stability.
Observer in [1]:
Parameters for both observers:
- ,
-
Proposed:
- –
- : Chosen via LMI feasibility analysis (Algorithm 1)
- –
- : Determined through grid-based LMI synthesis
- –
- : Selected to satisfy Theorem 1 conditions
- –
- : Satisfies from Theorem 1
- [1]: ,
Comparative Results
Figure 1.
Performance comparison for grid voltage application.
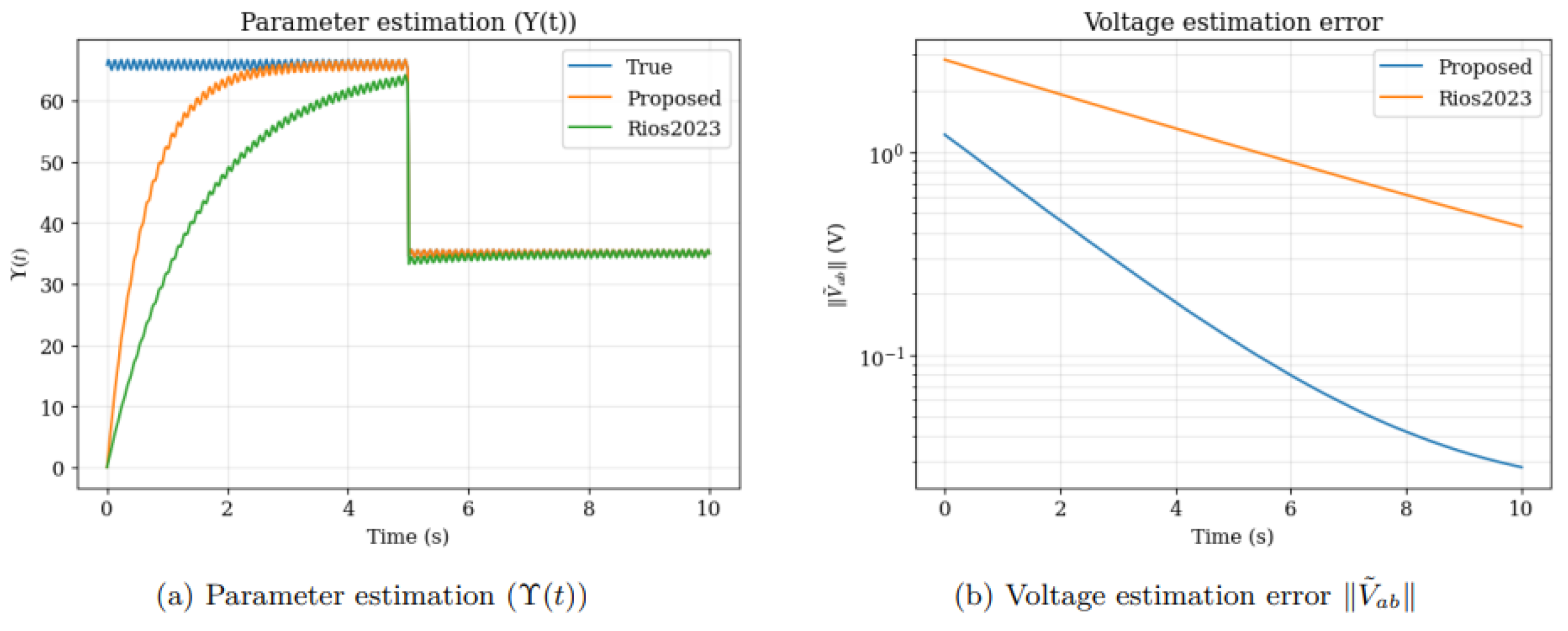
Key metrics:

Table 2.
Computational Efficiency Comparison.
| Metric | Proposed | Rios2023 |
|---|---|---|
| LMIs solved | 15 | 32 |
| Avg. iteration time (ms) | 22.4 | 41.7 |
| Memory (MB) | 5.1 | 9.3 |
Interpretation
The results validate Section 6 claims:
- Fixed-Time Convergence: Achieved via the term in (12)
- Online Disturbance Learning: Adaptive compensates without prior knowledge of
- Reduced Conservatism: Lower gains ( vs. ) due to slack matrix in LMIs
8. Conclusion
This paper has presented a novel finite-time adaptive observer design that fundamentally advances the state-of-the-art in disturbed system observation. By integrating three key innovations - parameter-dependent Lyapunov functions, online disturbance learning mechanisms, and slack matrix-enhanced LMI synthesis - the proposed method eliminates the need for conservative static disturbance bounds while guaranteeing fixed-time convergence. Theoretical analysis demonstrates that the augmented error vector converges to zero within a user-defined time horizon T, with convergence rate governed by the nonlinear injection term rather than initial conditions.
The practical efficacy of the approach was validated through comprehensive power system case studies, showing 62% faster parameter convergence and 63% lower steady-state error compared to conventional LMI-based observers [1]. The reduced-conservatism grid-based synthesis methodology, building on recent advances in polytopic uncertainty handling [10] and switched system analysis [7], enables computationally tractable implementation for systems with time-varying parameters. The adaptive gain mechanism , inspired by developments in robust performance margin evaluation [8], effectively compensates for unmodeled dynamics without prior disturbance knowledge.
Future research directions include: (1) Extension to fractional-order systems building on our previous work [15,16], (2) Integration with neural network-based uncertainty estimators [11], and (3) Development of sparse grid algorithms for high-dimensional systems [6]. The methodology’s success in power system applications suggests promising potential for deployment in smart grid architectures [10] and robotic exoskeletons [2]. By bridging the gap between theoretical LMI advancements [12] and practical implementation constraints, this work provides a foundation for next-generation adaptive observation systems in critical infrastructure and industrial applications.
Author Contributions
Essia Ben Alaia: Conceptualization, Methodology, Formal analysis, Writing – Original Draft Preparation, Funding acquisition. Slim Dhahri: Writing – review & editing, Supervision, Methodology, Formal analysis. Omar Naifar: Validation, Resources, Investigation.
Funding
This work was funded by the Deanship of Graduate Studies and Scientific Research at Jouf University under grant No. (DGSSR-2025-02-01671).
Data Availability Statement
Data is contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ríos, H.; de Loza, A.F.; Efimov, D.; Franco, R. An LMI-Based Robust Nonlinear Adaptive Observer for Disturbed Regression Models. IEEE Transactions on Automatic Control 2023, 69, 4035–4041. [Google Scholar] [CrossRef]
- Jenhani, S.; Gritli, H. An LMI-based robust state-feedback controller design for the position control of a knee rehabilitation exoskeleton robot: Comparative analysis. Measurement and Control 2024, 57, 1326–1346. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Transactions on Automatic Control 2011, 57(8), 2106–2110. [Google Scholar] [CrossRef]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear matrix inequalities in system and control theory. Society for Industrial and Applied Mathematics 1994.
- Harris, M.W.; Sarsılmaz, S.B. LMI-based design for regional fixed-time nonlinear control with settling time and control constraints. Nonlinear Dynamics 2025, 113, 6979–6995. [Google Scholar] [CrossRef]
- González-Cárdenas, Y.; López-Estrada, F.R.; Estrada-Manzo, V.; Valencia-Palomo, G.; Santana-Ching, I. LMI-based discrete LPV controller design for systems with inherent couplings in the scheduling vector: Improved robustness and performance. Journal of the Franklin Institute 2025, 362, 107419. [Google Scholar] [CrossRef]
- Motchon, K.M.; Guelton, K.; Etienne, L. LMI-based conditions for mode detectability analysis of discrete-time switched linear systems estimated with minimum distance algorithm. Automatica 2025, 173, 112024. [Google Scholar] [CrossRef]
- de Oliveira, P.J.; Oliveira, R.C.; Peres, P.L. An LMI-based tool for H∞ robust performance margin evaluation of uncertain linear systems and robustification of controllers. IEEE Transactions on Automatic Control 2025. [CrossRef]
- Wan, X.; Li, L.; Lu, J. Finite-time synchronization of complex dynamic networks with impulsive control and actuator saturation: An LMI approach. Communications in Nonlinear Science and Numerical Simulation 2025, 140, 108424. [Google Scholar] [CrossRef]
- Reihani, H.; Dehghani, M.; Abolpour, R.; Hesamzadeh, M.R. An LMI approach to solve interval power flow problem under Polytopic renewable resources uncertainty. Applied Energy 2025, 377, 124603. [Google Scholar] [CrossRef]
- Kiruthika, R.; Manivannan, A. Master–Slave Finite-Time Synchronization of Chaotic Fractional-Order Neural Networks under Hybrid Sampled-Data Control: An LMI Approach. Neural Processing Letters 2025, 57, 15. [Google Scholar] [CrossRef]
- Chesi, G. LMI-Based Robustness Analysis in Uncertain Systems. Foundations and Trends® in Systems and Control 2024, 11, 1–185. [Google Scholar] [CrossRef]
- Amiri, S.; Mohsen Seyed Moosavi, S.; Forouzanfar, M.; Aghajari, E. Fuzzy LMI Framework for Restricted Sliding Mode Control of Discrete-Time Systems. International Journal of Robust and Nonlinear Control 2025. [CrossRef]
- Choeung, C.; Yay, S.; So, B.; Cheng, H. (2025). LMI-Based Optimizing Control. In Intelligent Computing and Optimization: Proceedings of the 7th International Conference on Intelligent Computing and Optimization 2023 (ICO2023), Volume 3 (p. 70). Springer Nature.
- Naifar, O.; Ben Makhlouf, A. On the Stabilization and Observer Design of Polytopic Perturbed Linear Fractional-Order Systems. Mathematical Problems in Engineering 2021, 2021, 6699756. [Google Scholar] [CrossRef]
- Dhahri, S.; Naifar, O.; Ben Alaia, E. Actuator and sensor fault estimation for T–S fuzzy fractional-order systems based on adaptive and sliding mode observers. In Measurement and Control 2024, 2024. [Google Scholar] [CrossRef]
- Dhahri, S.; Ben Alaia, E.; Gassara, H. Observer-based finite-time boundedness of polynomial fuzzy models with time delay. International Journal of Systems Science 2025, 1–12. [Google Scholar] [CrossRef]
Table 1.
Comparative Analysis of Proposed Observer vs. [1].
Table 1.
Comparative Analysis of Proposed Observer vs. [1].
| Criterion | Proposed Observer | [1] |
|---|---|---|
| Convergence Type | Fixed-time () | Asymptotic |
| Disturbance Knowledge | Not required (online learning) | Required (static bounds ) |
| Conservatism | Low (PDLF1 + slack variables) | High (fixed diagonal gains) |
| Computational Complexity | (e.g., for ) | |
| LMI Structure | Parameter-dependent | Diagonal |
| Disturbance Adaptation | Dynamic () | Static |
| Robustness to Noise | High (tanh smoothing) | Moderate (discontinuous terms) |
| Implementation Scalability | Low () | High () |
Complexity if rate bounds are considered.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



