Submitted:
07 August 2025
Posted:
07 August 2025
You are already at the latest version
Abstract
This study deals with robust design methodology to reduce cogging torque in EPS (Electric Power Steering) of automotive system. Cogging torque reduction is the key design factor to enhance steering feeling and drive stability in EPS system. In this reason, SPMSM (Surface Permanent Magnet Synchronous Motor) type has been widely used as drive motor in EPS system. Furthermore, two design methods, which are magnet shape design and step-skew design for rotor assembly, have been mainly used to reduce cogging torque in SPMSM. In this paper, SPMSM is selected as drive motor and propose a robust design methodology to reduce cogging torque in EPS system. First, cycloid curve on the magnet shape is used to reduce cogging torque. An evaluation index q is also used to compare the conventional magnet shape design. Second, based on the results of the magnet shape design with the cycloid curve, the step-skew design for rotor assembly is also applied to e cogging torque. In order to verify the effectiveness of the robust design for the cycloid curve and conventional magnet shape with rotor step-skew, the analysis with FEM (Finite Element Method) results and prototype tests are compared. The cycloid curve magnet shape model with rotor step-skew was verified to reduce the cogging torque and enhance the robustness for cogging torque variation through the analysis and protype test results. The verified results for the proposed model will be extended to meet the required cogging torque variation for the various application driven by SPMSM with the robust design model.
Keywords:
rotor step-skew
; cogging torque
; surface permanent magnet synchronous machine
; magnet shape
; cycloid curve
; eccentric curve
; robust design
; electric power steering
1. Introduction
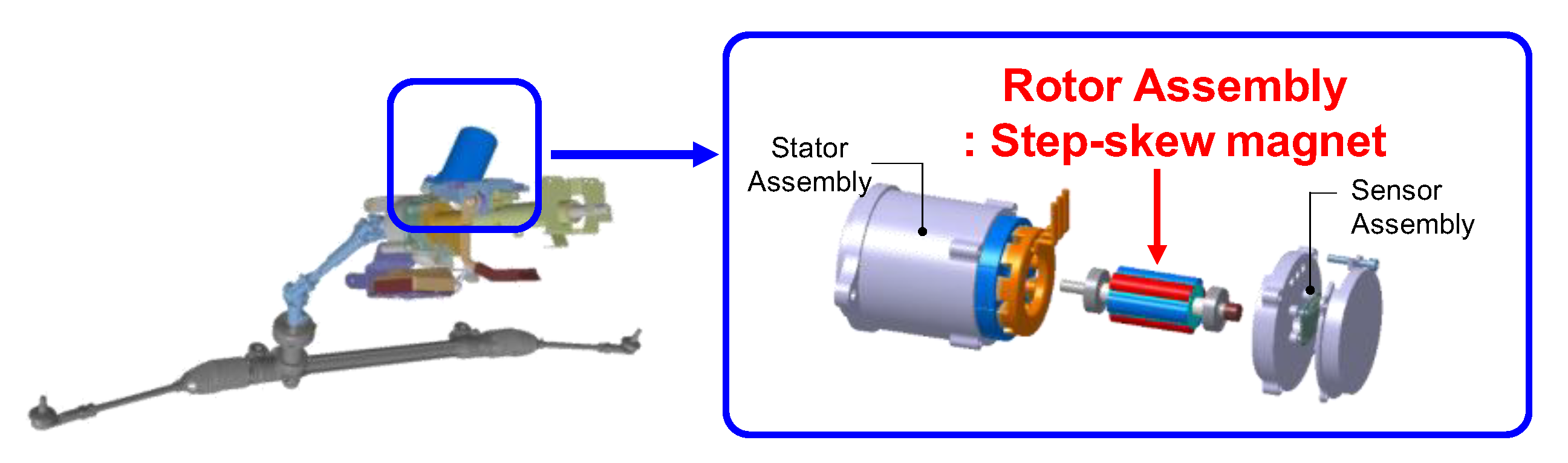
As the regulation for CO2 reduction and fuel efficiency improvement increases, electrified systems have been widely used such as power train and chassis system [1,2,3]. In electrified system in vehicle, EPS (Electric Power Steering) is the most representative electrified system in chassis system as shown in Figure 1 [4,5]. In EPS system, PMSM (Permanent Magnet Synchronous Motor) has been mainly adopted due to high torque density and efficiency [6].
However, cogging torque reduction is the key design quality factor to enhance steering feeling and driving stability at high speed in EPS system [7]. In this reason, SPMSM (Surface Permanent Magnet Synchronous Motor) which has magnet outside rotor core has been widely used to reduce cogging torque, compared to IPMSM (Internal Permanent Magnet Synchronous Motor) which has magnets inside rotor core. Compared to SPMSM, IPMSM has a weakness in terms of reducing cogging due to saliency of rotor structure [8].
Cogging torque is a torque pulsation due to the change of magnetic resistance at no-load drive. This cogging torque depends on the shapes and material properties of the rotor, stator, and magnet [9,10]. In this reason, design methods to reduce cogging has been studied extensively in various ways. Previous studies for cogging torque reduction are mainly classified into magnet shape and skew design for the rotor assembly of SPMSM used in EPS system. In case of magnet shape design, applying eccentricity to the magnet shape has been widely used to improve cogging torque reduction [11,12].
In addition to the magnet shape design, skew design for cogging torque reduction is classified into continuous and step skew. Although continuous skew has more strength than step-skew to reduce cogging torque, step-skew design for rotor assembly has been in mass-production of EPS system for the manufacturing cost reduction [13,14,15]. Generally, the combination design with eccentric magnet shape and step-skew for rotor assembly have been applied [16].
In past studies, cycloid curves have been widely applied in mechanical fields, e.g., in speed reducers and oil pumps [17,18,19]. However, in the study by Park, Lim, and Lee [20], the cycloid curve was applied to the rotor of a motor. In their study, it was also verified that cogging torque was improved for a motor to which a cycloid curve was applied. However, the combination method for cycloidal curve on the magnet shape and step-skew design is not reported and its effectiveness is not also verified.
Furthermore, robust design has been required to guarantee the quality and maintenance of motors after mass-production [21,22,23]. Especially, robust design has been strictly conducted to meet the required variance of cogging torque considering manufacturing disturbances for mass production [24,25,26].
In this study, a cycloid curve on the magnet shape is used to reduce the cogging torque with the combination methods for rotor step skew design. Based on the same rotor step-skew design, an evaluation index δq is used and determined to compare the proposed and conventional magnet shape design. Robust design with cogging torque reduction for the proposed and conventional model are compared and verified through analytical method and prototype tests. using numerical method.
Figure 1.
EPS (Electric Power Steering) system in vehicle: (a) Configuration of EPS system; (b) SPMSM (Surface Permanent Magnet Synchronous Motor) used in EPS system.
Figure 1.
EPS (Electric Power Steering) system in vehicle: (a) Configuration of EPS system; (b) SPMSM (Surface Permanent Magnet Synchronous Motor) used in EPS system.
2. Analysis Model
In this study, the motor type is SPMSM as shown in Figure 2. Figure 2 (a) and (b) show also the cross-sectional view of stator and rotor core in Figure (1) respectively. The numbers of slot and pole in this study are 9 and 6 respectively. In case of Figure 2 (b), the numbers of poles are 2 with 1/3 model of rotor core which are equivalent to 6 poles. Table 1 shows the detail specifications of stator and rotor core as shown in Figure 2.
Figure 2.
Stator and rotor core for analysis model: (a) Stator core with 9 slots; (b) Rotor core and magnet with 2 poles (1/3 model).
Figure 2.
Stator and rotor core for analysis model: (a) Stator core with 9 slots; (b) Rotor core and magnet with 2 poles (1/3 model).
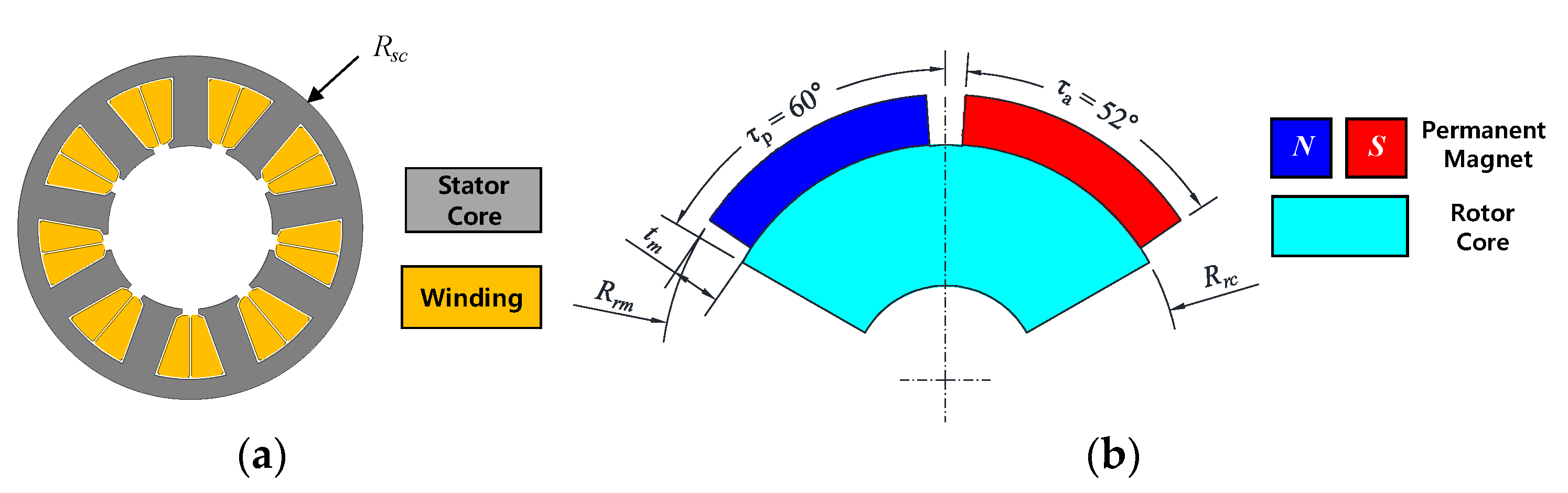

Table 1.
Main specification for analysis model.
| Symbol | Variable name | Unit | Value |
|---|---|---|---|
| - | Type | - | SPMSM |
| - | Phase/Pole/Slot | - | 3/6/9 |
| Rsc | Radius of stator core | mm | 42 |
| Rrm | Radius of rotor | mm | 19 |
| tm | Magnet thickness | mm | 3.3 |
| τa | Magnet pole pitch | Degree | 60 |
| τp | Manet pole angle | Degree | 52 |
| Lag | Air gap length | mm | 1 |
| Lstk | Stack length | mm | 57 |
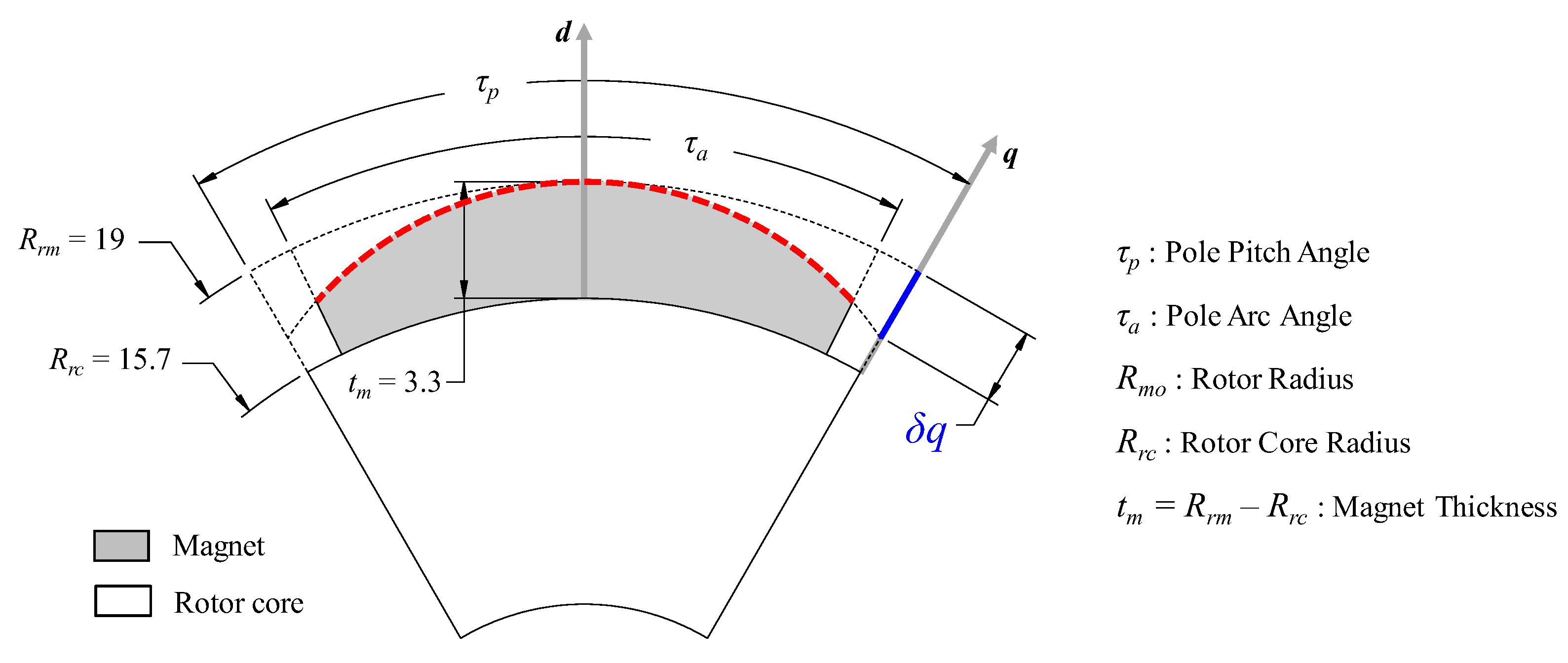
Based on the specification of analysis model as shown in Figure 2 and Table 1, an evaluation index δq is used to compare the proposed and conventional of magnet curve, which is expressed as red dotted line in Figure 3. Δq is the air gap length on the q axis that is electrically at 90 degrees to the axis of the center axis d axis which the magnetic flux of rotor magnet. The length of δq can be described in Figure 3. In this paper, the δq is defined as the distance from the inter-section point of the extended curve for the magnet shape (red dotted line in Figure 3) and the q axis to the intersection point of the rotor outer radius Rrm and the q axis.
Figure 3.
Definition of δq to compare the proposed and conventional magnet curve.
3. Proposed Model for Magnet Shape
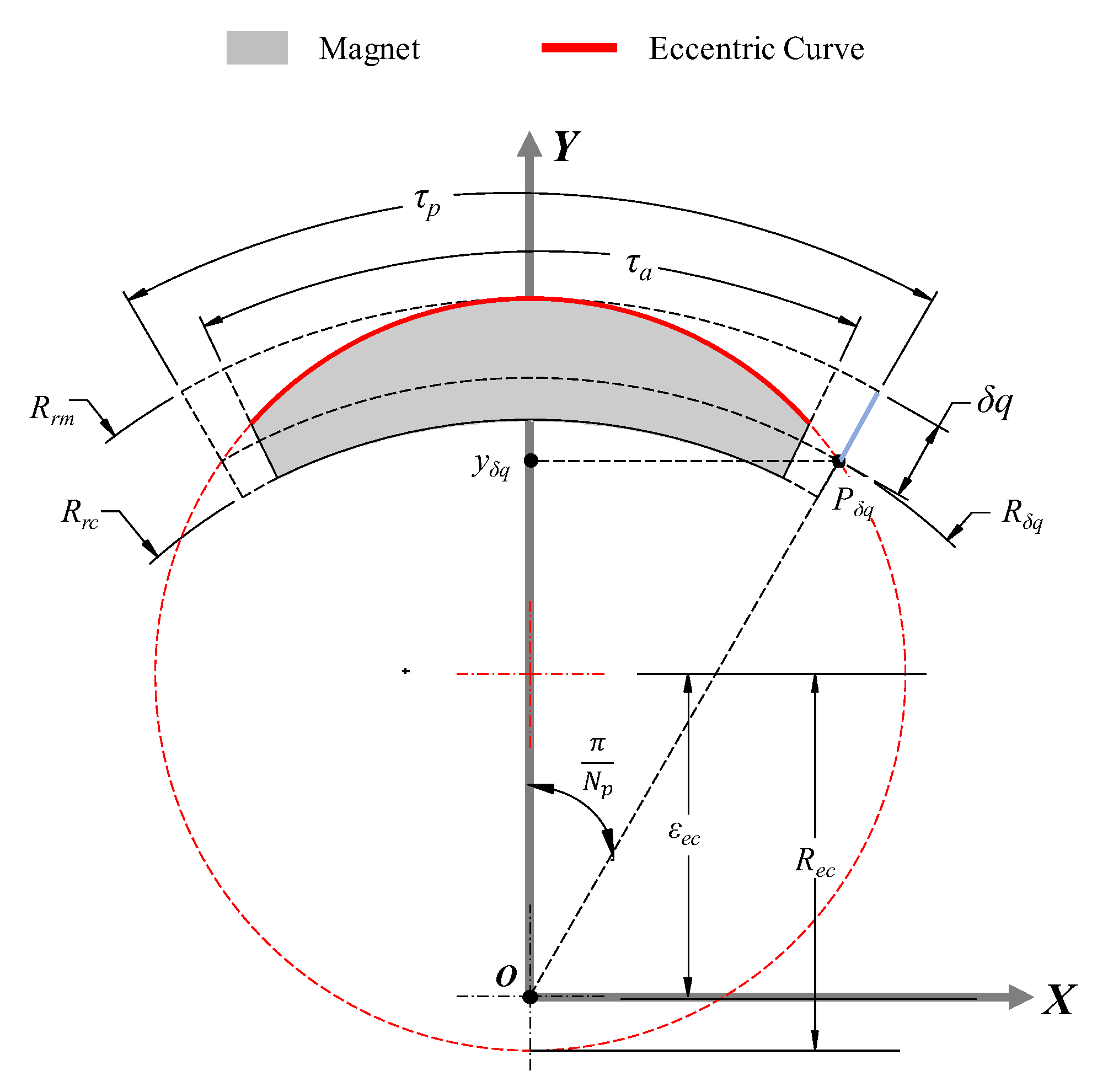
The eccentric curve has been generally used in the magnet shape of SPMSM to reduce cogging torque and torque ripple [11,12]. In this study, the eccentric curve, which has an eccentricity from its center, is used to com-pare the proposed curve on the magnet shape as shown in Figure 4. In order to apply the eccentric circle to the magnet shape, the known parameters are decided. The known parameters are δq , Rrm , tm and Np (The numbers of pole). The unknown parameters of eccentric circle radius Rec and eccentricity εec can be calculated by using geometrical relation as shown in Figure 4 [20].
Figure 4.
Definition of eccentric curve for the conventional curve on the magnet.
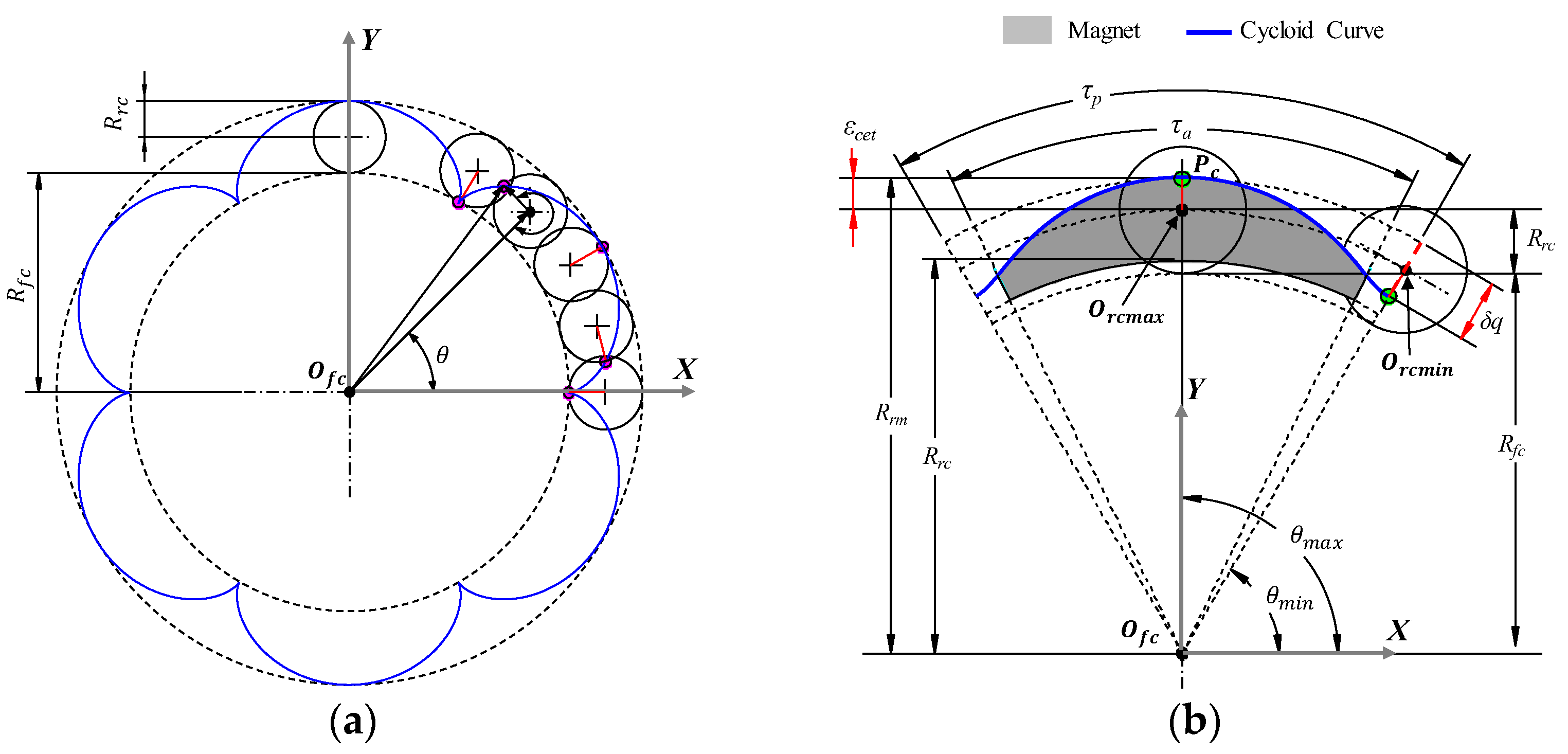
The proposed curve for the magnet shape is cycloid curve. A cycloid is the curve traced by a point in or on rolling circle with radius Rrc as the rolling circle rolls along a fixed circle with radius Rfc without slippage as shown in Figure 5 (a). In order to apply cycloid curve to the magnet shape in the same procedure of eccentric cure, the known parameters are also decided. The known parameters are those of eccentric curve such as δq , Rrm , tm and Np. The unknown parameters of Rfc , Rrc , and eccentricity of cycloid curve εecc can be also calculated by using geometrical relationship as shown in Figure 5 (b) [20].
Figure 4 shows the cycloidal curve trajectory of 6 poles magnet for the rotor model given in Figure 2 (b). In addition, Figure 4 (a) shows the trajectory of cycloid curve for 6 poles of rotor without δq. In contrast to Figure 4(a), Figure 4 (b) shows the trajectory of cycloid curve with a certain value of δq for 1 pole of rotor.
Figure 5.
Definition of cycloid curve for the conventional curve on the magnet: (a) Trajectory of cycloid curve for 6 poles of rotor; (b) Trajectory of cycloid curve on the magnet with 1 pole and δq.
Figure 5.
Definition of cycloid curve for the conventional curve on the magnet: (a) Trajectory of cycloid curve for 6 poles of rotor; (b) Trajectory of cycloid curve on the magnet with 1 pole and δq.
Based on the design procedure of the conventional and proposed curve on the magnet for a given value of δq , the calculation of cogging torque is conducted. As described in chapter.1 of Introduction section, a cogging torque is a torque pulsation due to the change of magnetic resistance at no-load drive. Generally, the equation of cogging torque Tcog is expressed in Equation 1 [11,12].
In Equation 1, θ is the rotational position of rotor, Lstk is the stack length of motor core, μair is the permeability of air, r is the radius of rotor, 2π is the 1 period of cogging toque pulsation, Br is the magnetic flux density into radial direction and Bθ is the magnetic flux density into tangential direction. Additionally, Cogging torque has also the period of torque pulsation for a given number of pole and slot as shown in Equation 2.
In Equation 2, θcog is the mechanical angle of 1 period for cogging torque pulsation, Np and Ns denote the number of pole and slot respectively and LCM means Least Common Multiple. In order to calculate cogging torque, analytical method is a possible solution as shown Equation 1. However, it is relatively difficult to calculate cogging torque as following. First, non-linear properties of magnetic materials such as permanent magnet and electric core. Second, complex geometry of magnet shape such as conventional and proposed curve. In this study, Numerical analysis of FEM (Finite Element Method) is used in order to analyze cogging torque.
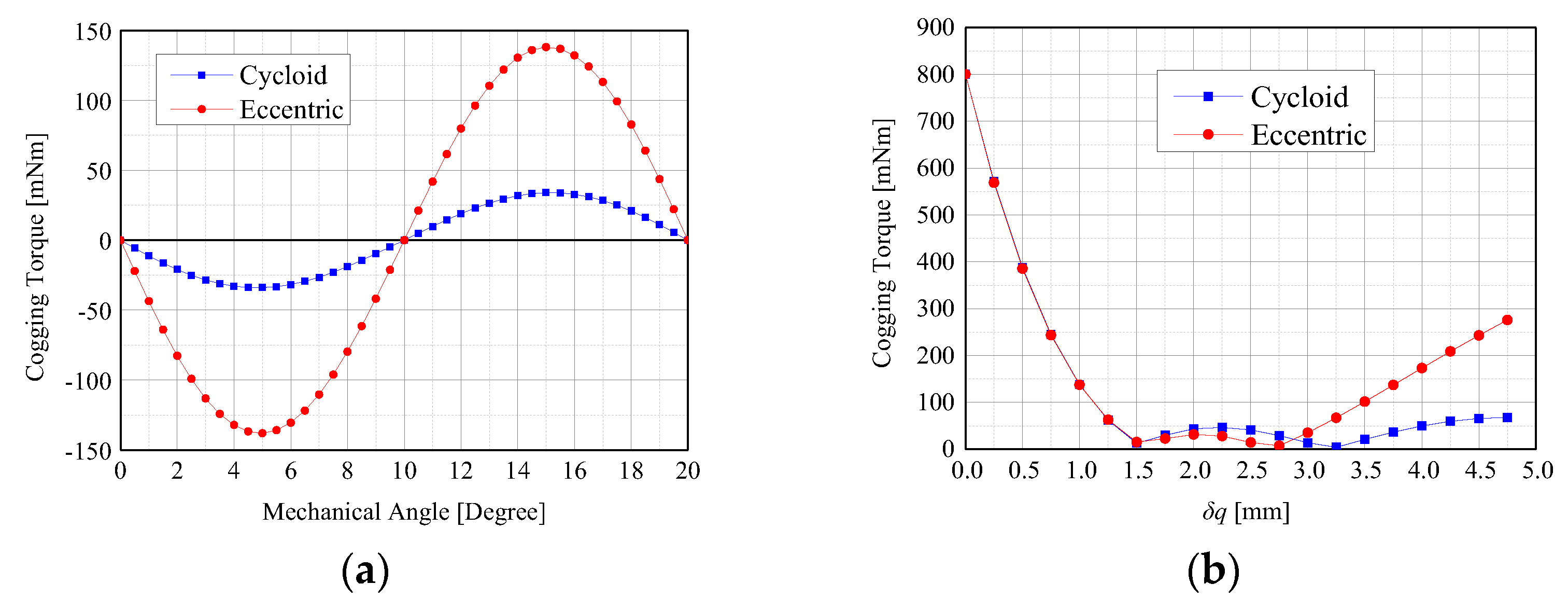
Figure 6 shows the calculation results of cogging torque. Figure 6 (a) shows the wave form of 1 period for cogging torque pulsation. As described in Equation (2), the mechanical angle of cogging torque θcog for Figure 6 (a) is 20° at δq = 4.75mm with 6 Poles and 9 Slots for this analysis model in Table 1. Figure 6 (b) shows the peak to peak values of cogging torque at δq (0 ≤ δq ≤ 4.75).
Figure 6.
Calculation results of cogging torque: (a) Wave form of 1 period for cogging torque pulsation; (b) Peak to peak values of cogging torque at δq (0 ≤ δq ≤ 4.75).
Figure 6.
Calculation results of cogging torque: (a) Wave form of 1 period for cogging torque pulsation; (b) Peak to peak values of cogging torque at δq (0 ≤ δq ≤ 4.75).
Based on the conventional and prosed curve on the magnet shape, the step skew design, which is the method of cogging torque reduction as explained in chapter 1 of Introduction, is described to reduce cogging torque additionally. Step skew angle θNskew is found by dividing by Nstep in Equation (2). Equation (3) shows the calculation of θNskew.
In Equation (3), Nstep is the number of step and θNskew is the step-skew angle with Nstep. In this study, 3 step-skew is used to compare the conventional and proposed curve on the magnet shape. Figure 7 (a) and (b) show Skew angle θcog = 20˚ in Equation (2) and Step Skew Angle θskew = 6.67° in Equation (3) with 6 poles and 9 slots for Lstk = 57mm respectively.
Figure 7.
Skew angle and Step-skew angle for 6 poles and 9 slots: (a) Skew Angle θcog = 20˚; (b) Step Skew Angle θ3skew = 6.67°.
Figure 7.
Skew angle and Step-skew angle for 6 poles and 9 slots: (a) Skew Angle θcog = 20˚; (b) Step Skew Angle θ3skew = 6.67°.

In this study, δq is selected as 4.5 considering the performance variation due to the manufacturing tolerances. 3D models for the cycloid curve on the shape magnet is shown in Figure 8 (a) with 3 step-skew of Figure 7. In Figure 8 (b) and (c), the wave-forms of 1 period for cogging torque pulsation is shown for non-skew and 3 step-skew model of the eccentric and proposed curve at δq =4.5, respectively.
Figure 8.
3 step-skew model and calculation results: (a) 3D models of Non-step skew and 3 step-skew for the cycloid curve at δq =4.5; (b) Wave-forms of cogging torque for non-skew model at δq = 4.5; (c) Wave-forms of cogging torque for 3 step-skew model at δq = 4.5.
Figure 8.
3 step-skew model and calculation results: (a) 3D models of Non-step skew and 3 step-skew for the cycloid curve at δq =4.5; (b) Wave-forms of cogging torque for non-skew model at δq = 4.5; (c) Wave-forms of cogging torque for 3 step-skew model at δq = 4.5.
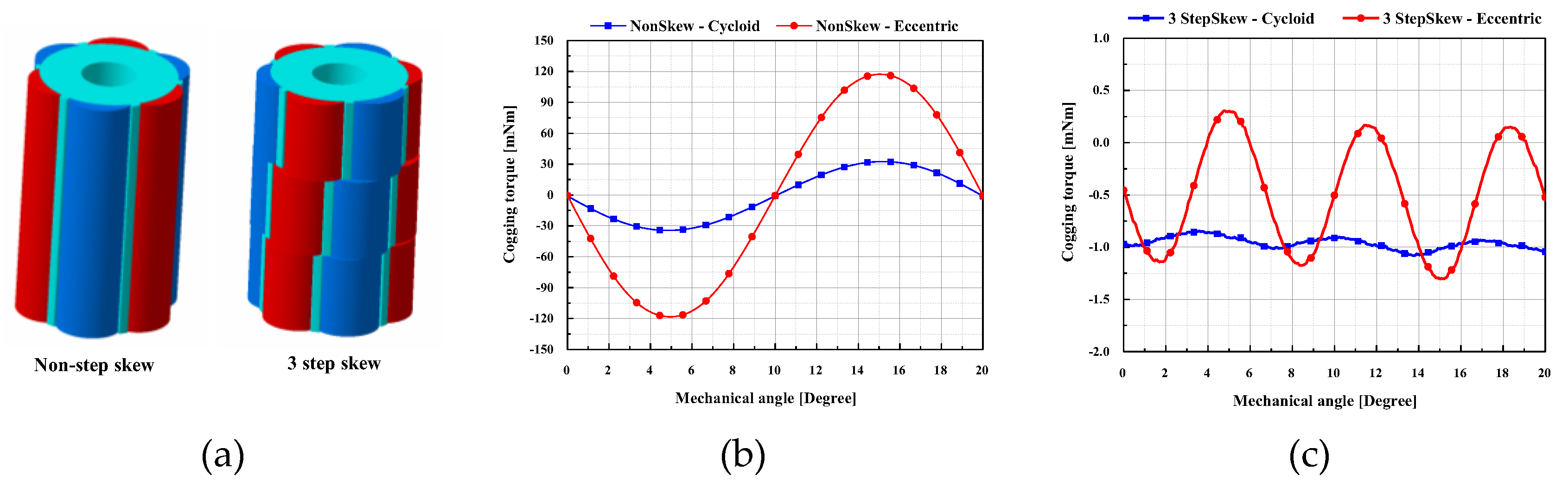
Table 2 shows the peak to peak values of cogging for the Non-skew and 3 step-skew model with the eccentric and cycloid curve on the magnet δq = 4.5.
Table 2.
Cogging torque for the Non-skew and 3 step-skew model δq = 4.5.
| Skew model | Cycloid model (Proposed model) |
Eccentric model (Conventional model) |
Unit |
|---|---|---|---|
| Non-skew | 64 | 236 | mNm |
| 3 step-skew | 0.2 | 1.6 | mNm |
In order to explain the effective cogging reduction mechanism for the cycloid curve on the magnet, order analyses are conducted for the eccentric and cycloid curve on the magnet with the non-skew step rotor. The electric fundamental order of PMSM with 6 poles and 9 slots in Table 1 is 6 for the 360-mechanical degree. In addition to the fundamental order, the 6n orders with the positive integer value n are also generated. Figure 9 shows the order analysis results of cogging torque wave-form for the non-skew model with 6’th n orders in Figure 8.
Figure 9.
6n’th cogging torque for the eccentric and cycloid curve on the magnet : (a) δq = 0.0 ; (b) δq = 3.0 ; (c) δq = 4.0 ; (d) δq = 4.75
Figure 9.
6n’th cogging torque for the eccentric and cycloid curve on the magnet : (a) δq = 0.0 ; (b) δq = 3.0 ; (c) δq = 4.0 ; (d) δq = 4.75
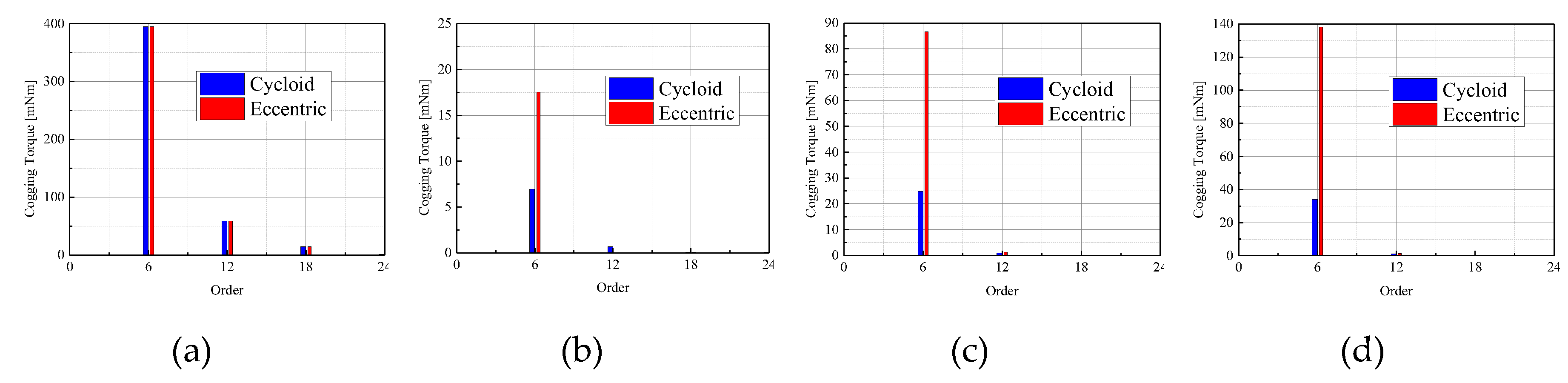
As shown in Figure 9, the 6’th orders are dominant orders for the cogging torque at the given values of δq. Figure 10 (a) and (b) show the cogging torque of 6’th and 12’th order for the value of δq. As shown in Figure 10 (a), the 6’th order of cogging torque for the eccentric curve on the magnet increases sharply after δq = 3.0. In this reason, the 6’th and 12’th order of cogging torque are the main orders for the cogging torque generation for the eccentric and cycloid model. Compared the eccentric curve model, the 6’th and 12’th order of cogging torque for the cycloid model are decreased as the values of δq increases.
Figure 10.
cogging torque (peak to peak value) of the 6’th and 12’th order for the eccentric and cycloid curve on the magnet : (a) 6’th order cogging torque; (b) 12’th order cogging torque.
Figure 10.
cogging torque (peak to peak value) of the 6’th and 12’th order for the eccentric and cycloid curve on the magnet : (a) 6’th order cogging torque; (b) 12’th order cogging torque.

4. Validation
In order to validate the cogging torque reduction for the proposed model, the prototypes are built for the proposed and conventional model as shown in Figure 11. In Figure 11 (c), the reference model has the value of δq = 4.5 as shown in Figure 11 (a) and (b). The reference model was also built to compare the effectiveness for the proposed and conventional model in Figure (c) with δq = 0 for the conventional model.
Figure 11.
Protypes for the proposed and conventional model at δq = 4.5 : (a) cycloid for the proposed model ; (b) eccentric for the conventional model; (c) reference model.
Figure 11.
Protypes for the proposed and conventional model at δq = 4.5 : (a) cycloid for the proposed model ; (b) eccentric for the conventional model; (c) reference model.

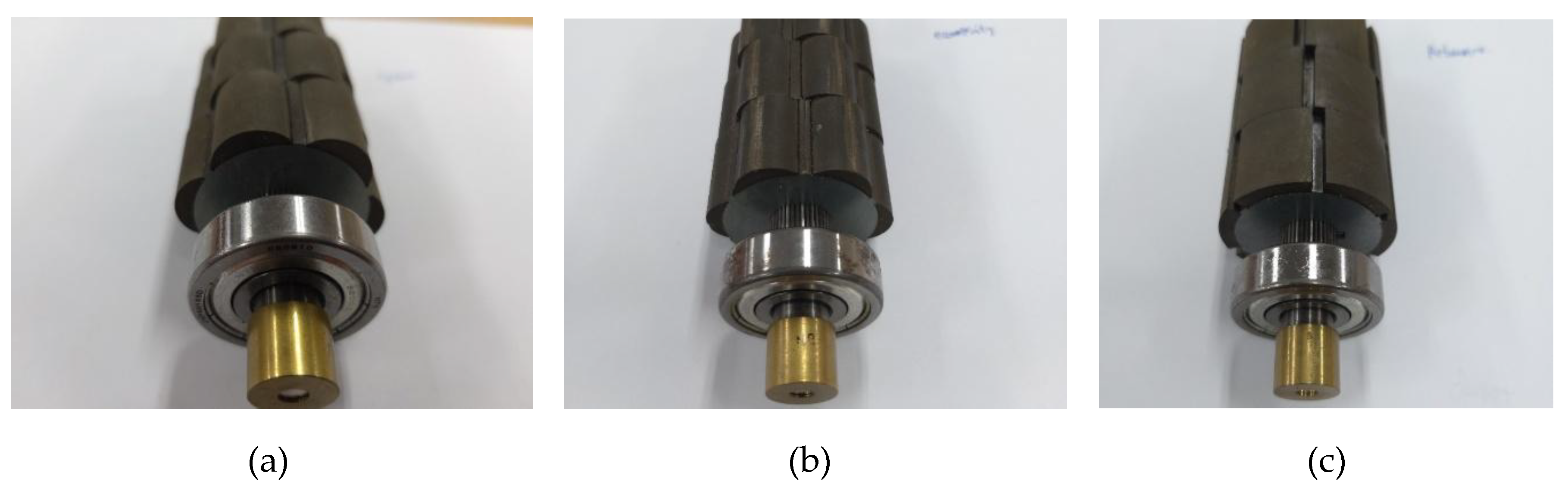
Figure 12 (a) and (b) shows the measurement equipment to measure the wave-forms of cogging torque and the measurement results of cogging torque wave-forms for the prototypes as shown in Figure 11. Figure 13 (b) shows the analysis results of cogging torque wave-forms for the prototypes as shown in Figure 11. Figure (c) shows the extended cogging torque wave-forms for the cycloid and eccentric model in Figure 13 (b).
Based on the analysis and tests results as shown in Figure 12 and Figure 13, the peak to peak values of cogging torque for the prototypes in Figure 11 are shown in Table 3. The effectiveness of cogging torque reduction for the proposed model with the cycloid was verified through the results of analysis and tests results as shown in Figure 12, Figure 13 and Table 3.
However, there are considerable differences of the peak to peak values of cogging torque between the analysis and test results in Table 3. In this study, the motor used in EPS system was dealt with a high precision motor used in EPS system are dealt with the strict cogging torque limit in the unit of mNm. In this reason, these considerable differences of cogging torque for the analysis and test results are affected by the manufacturing deteriorations [20,22,23].
Figure 12.
Measurement equipment and test results : (a) Measurement equipment ; (b) Test results of cogging torque wave-forms for the 3 prototypes with the 360 degree of mechanical angle.
Figure 12.
Measurement equipment and test results : (a) Measurement equipment ; (b) Test results of cogging torque wave-forms for the 3 prototypes with the 360 degree of mechanical angle.
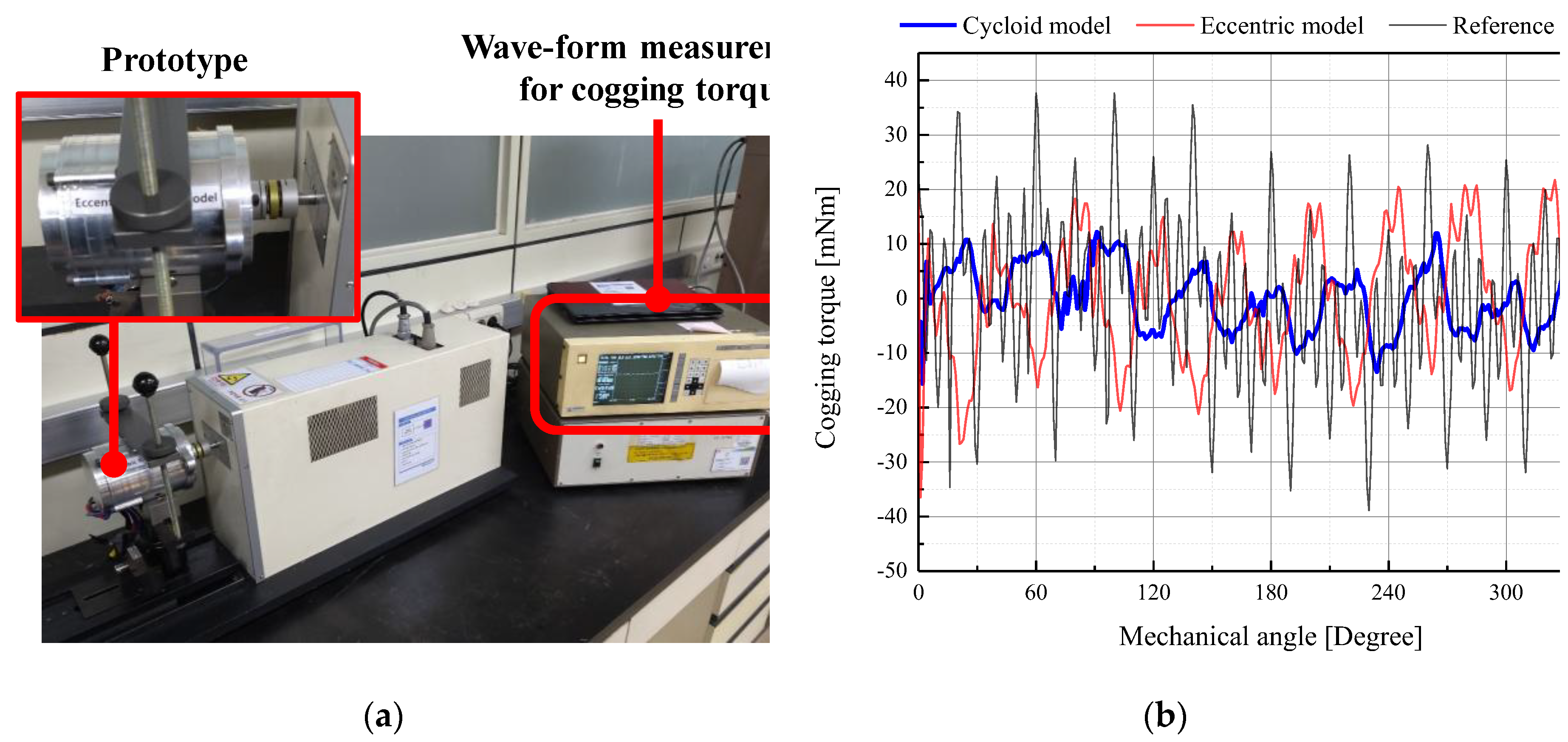
Figure 13.
FEM results : (a) cogging torque (peak to peak value) for the δq ; (b) wave-forms of cogging torque for the cycloid, eccentric and reference model for the 360 degree of mechanical angle ; (b) wave-forms of cogging torque for the cycloid and eccentric model for the 360 degree of mechanical angle.
Figure 13.
FEM results : (a) cogging torque (peak to peak value) for the δq ; (b) wave-forms of cogging torque for the cycloid, eccentric and reference model for the 360 degree of mechanical angle ; (b) wave-forms of cogging torque for the cycloid and eccentric model for the 360 degree of mechanical angle.
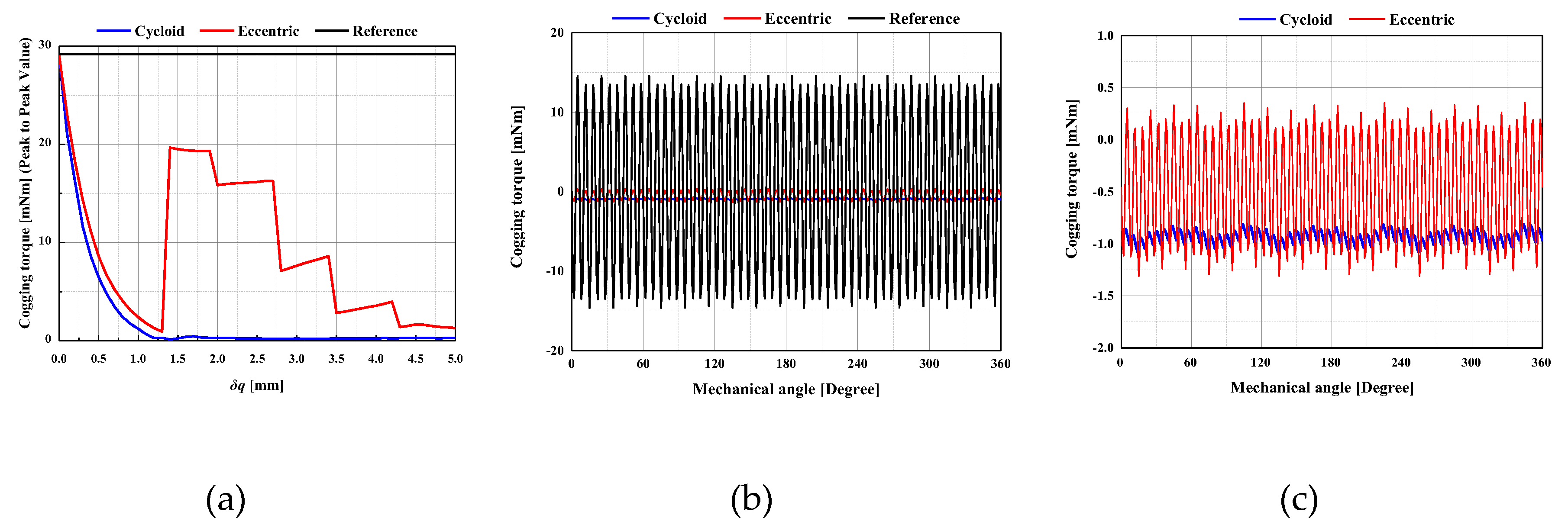
Table 3.
Cogging torque for the Non-skew and 3 step-skew model δq = 4.5.
| Cogging Torque (Peak to peak value) |
Proposed model (Cycloid model) |
Conventional model (Eccentric model) |
Reference model | Unit |
|---|---|---|---|---|
| Analysis (FEM) | 0.2 | 1.6 | 29.2 | mNm |
| Test | 27.8 | 58.2 | 76.5 |
Although there are considerable differences between analysis and test results, the peak to peak values of cogging torque for the proposed model has little variation for the δq from 1.0 to 5.0 as shown in Figure 10 (a) and Figure 13 (a). In this reason, the proposed model for the non-skew and skew model are verified as the robust model for the manufacturing deteriorations compared to the conventional model.
5. Conclusions
This study proposed the design method of magnet shape with step-skew model to reduce cogging torque. The design strengths of prosed design method with the cycloid curve on the magnet was verified through analysis and test results compared to the conventional model.
The cogging torque for the proposed model is reduced by 72% compared to the conventional model in case of non-skew model. In case of 3 step-skew model, the cogging torque for the proposed model is reduced by 88% compared to the conventional model. Based on the order analysis of cogging torque wave form, the 6’th and 12’th order of cogging torque is the most dominant order to increase cogging torque in the proposed and conventional model. Compared to the conventional mode, the 6’th and 12’th order of cogging torque in the proposed model was decreased sharply as the δq increases. The effectiveness of cogging torque reduction for the proposed model was validated through the test results with the prototypes.
However, it was verified that there were considerable differences of the cogging torque between analysis and test results due to the manufacturing deteriorations. These considerable differences of cogging torque for the analysis and test results are affected by the manufacturing deteriorations for the motor in EPS system with the required lowest cogging torque. In this study, it was also verified that the proposed model has the robustness of the cogging torque reduction for the manufacturing variations compared to the conventional model. The verified results for the proposed model will be extended to meet the required cogging torque variation for the various application driven by SPMSM with the robust design model.
Author Contributions
Conceptualization, C.S.LEE.; methodology, C.S.LEE; validation, C.S.LEE.; formal analysis, C.S.LEE.; investigation, C.S.LEE.; resources, C.S.LEE.; data curation, writing—original draft preparation, C.S.LEE.; writing—review and editing, C.S.LEE.; visualization, C.S.LEE; All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Sun Moon University Research Grant of 2023.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The author declares no conflicts of interest.
References
- Zou, Y. ; Yang. Y.; Zhang, Y. Configuration and parameter design of electrified propulsion systems for three dimensional transportation: A comprehensive review, Green energy and intelligent transportation, 2025. [Google Scholar] [CrossRef]
- Yang, A.; Zang, Y.; Xu, Li. et al. A systematic review and future development of automotive chassis control technology. Applied sciences 2023, 13. [Google Scholar] [CrossRef]
- Li, Y. Advanced X-by-Wire technologies in design, control and measurement for vehicular electrified chassis. World electric vehicle journal 2023, 14. [Google Scholar] [CrossRef]
- EPS system, Available online : https://www.hlmando.com/en/solution/chassis/steering/electric-power/r-eps.do.
- Lee, C.S. Design and validation of magnet shape for SPMSM with cycloid curve, Ph.D of Thesis, Hanyang University, Seoul, South Korea, 2017.
- Choi, D.; Kim, D.; Han, D.; Kim, W. Design of a slotless structure for minimizing cogging torque torque ripple in a column type EPSmotor for vehicles, I.E.E.E. Trans. Magn. 2021, 60. [Google Scholar]
- Lee, Y.; Gil, J.; Kim, W. Velocity control for sideband harmonics compensation in permanent magnet synchronous motors with low switching frequency inverter, I.E.E.E. Trans. Ind. Elec, 2021. [Google Scholar]
- Jung, W.S. , Lee, H.K., Lee, Y.K. et al, Analysis and comparison of permanent magnet synchronous motors according to rotor type under the same design specifications. energies 2023, 16. [Google Scholar] [CrossRef]
- Wanjiku, J.; Khan, M.A.; Barendse, P.S.; Pilay, P. Influence of slot openings and tooth profile on cogging torque in axial-flux pm machines, IEEE Trans. Ind. Electron 2015, 62, 7578–7589. [Google Scholar] [CrossRef]
- Hwang, M.; Lee, H.; Cha, H. Analysis of torque ripple and cogging torque reduction in electric vehicle traction platform applying rotor notched design, energies 2018, 11, 1-14. [CrossRef]
- Qian, H.; Guo Hong Ding, X.; et al. Analytical solution for cogging torque in surface-mounted permanent-magnet motors with magnet imperfections rotor eccentricity, I.E.E.E. E.E.E. Trans. Mag. 2014, 50. [Google Scholar]
- Zhou, Y.; Li, H.; Cao, Q.; et al. Analytical calculation of magnetic field cogging torque in surface-mounted permanent-magnet machines accounting for any eccentric rotor shape, I.E.E.E. Trans. Ind. Elec 2015, 62. [Google Scholar]
- Lee, C.S.; Jung, G.T.; Hong, J.P.; et al. Design of brushless permanent machine with skewed stator for electrical power steering system, J. Korean Mag 2015, 25. [Google Scholar]
- Jiang, J.W. , Bilgin, B.; Emadi, A., et al, Rotor skew pattern design and optimization for cogging torque reduction. IET Electr. Syst. Trans 2015, 6. [Google Scholar]
- Blum, J.; Merwerth, J.; Herzog, H.G. Investigation of the Segment Order in Step-Skewed Synchronous Machines on Noise and Vibration. International Electric Drives Production Conference (EDPC) 2014, 1–6. [Google Scholar]
- Wu, T. , Schwarzer, D, and Neuwald, T. , et al, Investigation and comparison of permanent magnet rotors produced by different additive manufacturing methods, Elektrotech. Inftech 2024, 141, 155–163. [Google Scholar] [CrossRef]
- Frank, T. J.; Troben, O.A. The cycloid permanent magnetic gear, IEEE Trans. Ind. Appl. 2008, 244, 1659–1664. [Google Scholar]
- Choi, T.H. , Kim, M.S.; Jung, S.Y., Design of gerotor using cycloid and circular-arc curves, Transactions of the Korean society of mechanical engineers A 2011, 35.
- Shin, J.H.; Kown, S.M. , On the lobe profile design in a cycloid reducer using instant velocity center, Mechanism and machine theory 2006, 41.
- Lee, C.S.; Lim, M.S.; Park, H.J. Magnet shape design and verification for SPMSM of EPS System Using Cycloid Curve, IEEE ACCESS 2019, 7.
- Jang, J.; Cho, S.G.; Lee, S.J.; et al. Reliability-based robust design optimization with kernel density estimation for electric power steering motor considering manufacturing uncertainties, IEEE. Trans. Magn., 2015, 51.
- Wang, C.F.; Shen, J.X.; Luk, P.C.K.; et al. Design issues of an IPM motor for EPS, COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2011, 31, 71–87. [Google Scholar]
- Lee, C.S.; Kim, H.J. , Harmonic Order Analysis of Cogging Torque for Interior Permanent Magnet Synchronous Motor Considering Manufacturing Disturbances, energies 2022, 15, 1-13. [CrossRef]
- Kim, J.M.; Yoon, M.H.; Hong, J.P.; Kim, S.I. Analysis of cogging torque caused by manufacturing tolerances of surface-mounted permanent magnet synchronous motor for electric power steering. IEEE Trans. Electr. Power Appl 2016, 10, 1691–1696. [Google Scholar] [CrossRef]
- Jun, C.S.; Kwon, B.I.; Kwon, O.B. Tolerance Sensitivity Analysis and Robust Optimal Design Method of a Surface-Mounted Permanent Magnet Motor by Using a Hybrid Response Surface Method Considering Manufacturing Tolerances, energies 2018, 11.
- Ma, B.; Lei, G.; Zhu, J.G.; Gou, Y.G.; Liu, C.C. Application-Oriented Robust Design Optimization Method for Batch Production of Permanent-Magnet Motors, IEEE Transactions on industrial electronics 2018, 65.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



