
Submitted:
04 August 2025
Posted:
06 August 2025
You are already at the latest version
Abstract
This review synthesizes the existing literature comparing force production and muscle activation patterns in variable-cam machines versus other resistances, such as isokinetic devices. A systematic search was conducted using PubMed, Web of Science, and Scopus with the Boolean strategy [(“resistive torque” OR “resistance torque” OR “variable resistance”) AND (machine*)], yielding 12 relevant studies. These studies analyzed the force production patterns and muscle activation provided by variable resistance machines, specifically evaluating their strength curves and alignment with human torque curves (HTC). Findings indicated a discrepancy between machine resistance torque (MRT) and HTC, suggesting that current variable resistance machines do not optimally accommodate natural strength profiles and therefore fail to optimize the muscle activation during the exercise. Given this misalignment, future research should focus on developing and validating new resistance machines that can be more near to the results presented in HTC, thereby maximizing neuromuscular efficiency and training efficacy. Expanding research into multi-joint exercises and experimental studies will provide deeper insights into the effectiveness of variable resistance machines relative to other training methods, such as free weights and pulley systems. Improved variable-cam designs could enhance resistance training and rehabilitation outcomes by optimizing muscle activation and reducing mechanical stress.
Keywords:
machine resistive torque
; human torque capability
; muscular activation
; angle-torque relationship
; variable resistance
1. Introduction
In the middle of the 19th century, the necessity to align resistance with a patient’s varying strength first appeared through a resisted Range of Motion (ROM) [1]. Since then, numerous attempts have been made to create new training equipment to address the varying mechanical advantages and inertia of free weights or constant resistance [2,3]. Variable resistance is the concept utilized to describe a weight training system that provides a resistance that changes to match the joint’s ability to produce force throughout the ROM [4]. It is described as one of the three categories of dynamic strength: i) constant, isoinertial, or free-weight resistance (e.g.: pneumatic machines, which provide a constant weight throughout the movement despite how fast the practitioner perform the exercise [5], or, flywheel inertial resistance training that follows the principle of accelerating and then consequently braking the mass moment of inertia [6]); ii) accommodating resistance; and iii) variable resistance, based on the nature in which the resistance is applied on the contracting musculature [7]. Variable resistance is usually applied using three methods: i) variable-cam systems, which modulate the strength curve of machine-based resistance exercise; ii) chain resistance; and iii) elastic band resistance [8].
Variable-cam systems were previously studied by Arthur Jones, the founder of Nautilus, and Harold Zinkin, the founder of Universal [9]. Both started with a similar hypothesis stating that a muscle works at maximum capacity during a tiny portion of a dynamic repetition, therefore, the resistance must be varied to facilitate maximum muscular involvement [2,10]. This variation in resistance often referred to as a Machine Resistive Torque (MRT) [1] is graphically represented as the change in a machine’s force [11], torque [12,13], or variable-cam moment arm length [14,15] measured at various positions of the machine during the lifting stroke. The previously developed equipment aimed to adapt the offered resistance to match a preferable strength curve (Figure 1), representing the varying force a muscle can produce at different joint angles during a movement [16]. It occurs by manipulating the resistive torque according to the joint angle, described in the literature as the angle-torque relationship.
Even though these hypotheses were previously tested, and the basis was to adjust the resistance so that it is higher when the muscles can produce higher torque and lower when the muscles are less capable of producing a higher torque [18], it appears that variable-cam machines do not necessarily match standard human torque capability (HTC) patterns [14,18], poorly aligning its strength curves (Figure 2), which suggests a gap in the scientific literature regarding this topic and the effectiveness of this equipment, reinforcing the need to study this subject and its applications in Resistance Training (RT).
This review aimed to synthesize the available evidence on studies comparing force production and muscular activation patterns during exercises performed in variable-cam machines and other resistance machines (e.g., isokinetic devices). Furthermore, we aimed to provide practical recommendations to coaches and researchers regarding the procedures to assess the angle-torque relationship in exercises performed with variable-cam resistance machines and define future research guidelines.
2. Materials and Methods
This review was carried out using the PubMed, Web of Science, and Scopus databases, and the search Boolean search strategy was: [(“resistive torque” OR “resistance torque” OR “variable resistance”) AND (machine*)]. This search resulted in 381 articles (PubMed, 40 articles; Web of Science, 115 articles; Scopus, 226 articles), published since the first publication until 2024, of which 12 articles were included in the review (Table 1). Also, the references presented in the articles were analyzed. These studies are discussed throughout the article and presented in a manner that provides a synthesized summary of the available evidence on studies comparing force production and muscular activation patterns during exercises performed in variable-cam and other resistance machines. Of the 12 included articles, 6 studies compared variable-cam machines vs. isokinetic devices, of which 6 studies analyzed the angle-torque relationship, and 1 study analyzed muscle activity patterns. The remaining 6 studies compared variable-cam machines vs. other equipment, of which 6 analyzed the angle-torque relationship, and 4 analyzed muscle activity patterns.
3. Comparison Between Variable-Cam Machines vs. Isokinetic Devices
Numerous studies have been conducted to assess the HTC and to compare it with the MRT of several machines with variable resistance, such as Nautilus [14,17,21], Eagle [15], Strive, Life Fitness, Technogym, Hoofers, Cybex, and Sportesse [12], and also combining it with muscle activity [22].
This topic had its first appearance around 1980, further in 1983, Harman [14] compared the MRT of 5 Nautilus Exercise Machines with the HTC of each movement, using photographs to describe the MRT. In 1990 and in 1992, Johnson et al. [15] and Pizzimenti [21] respectively, also analyzed the MRT using photographs, however, Pizzimenti [17] instead of analyzing the MRT exclusively via photographs (theoretical) also evaluated it by coupling the equipment with an isokinetic dynamometer, which was also performed by Cabell and Zebas [17] in 1999. Later, in 2005, Folland et al. [22] compared isometric and dynamic training across muscle lengths and strength measures. And in 2008, Folland and Morris [12] compared torque profiles of eight knee extension machines across movement range. Table 2 summarizes the studies that compared variable-cam machines vs. isokinetic devices.
3.1. Angle-Torque Relationship
In the initiation of the study of the variable resistances, Harman [14] and Johnson et al. [15] used photography to describe the equipment’s patterns and measure the angles of movement and the moment arm throughout each variable-cam’s ROM. Moreover, both compared HTC with MRT using computer graphics. Harman [14] found that on Nautilus machines, MRT increased continuously for chest-fly and knee flexion exercises, while HTC decreased significantly. For knee extension, torque peaked at 110º and then dropped, and arm curls showed varied MRT with HTC below maximum at extremes. However, the study by Johnson et al. [15] showed that MRT and HTC aligned well up to 100º for knee extension. Knee flexion had similar torque patterns, and elbow flexion MRT peaked at 120º, suggesting minor variable-cam modifications could accommodate HTC patterns better. Otherwise, Harman [14] noted minimal alignment between MRT and HTC, denoting significant shape modifications needed to match machine torque with human strength curves. Johnson et al. [15] found that Eagle machines accommodated subjects well. Some years after the beginning of this line of research, Pizzimenti [21] and Cabell and Zebas [17] used an isokinetic dynamometer to assess HTC of the Nautilus Leg Curl Machine and of the Nautilus Multi-Biceps Machine, respectively. Pizzimenti [21] performed dynamic contractions (30 and 60º/s) to assess HTC while Cabell and Zebas [17] assessed HTC over a ROM from 0º to 120º at 45º/s. Both authors analyzed MRT by coupling the variable-cam equipment with the isokinetic dynamometer to assess the MRT, and additionally Pizzimenti [21] also evaluated the MRT theoretically by measuring the moment arm. Cabell and Zebas [17] results indicated that high torque capacity values were consistent across conditions. Moreover, high torque capacity decreased as angular velocity increased, aligning with the muscle force-velocity relationship. Additionally, while the peak torque angle varied slightly among individuals, the overall curve shapes were similar. Furthermore, the maximum resistance torque curves at three angular velocities were similar: at 30°/s, torque peaked at 36° and then decreased, and at 60°/s, torque decreased more significantly. Cabell and Zebas [17] concluded that the resistance of the Nautilus Multi-Biceps Machine did not match the strength curves of the elbow flexors throughout the entire ROM. Pizzimenti [21] found that the HTC was near maximal in the initial 30° of flexion and decreased with further flexion. Similarly, MRT showed the machine offered about 88% maximum torque at the onset of knee flexion, peaking at 64.5°, then decreasing to 94% at the terminal limit. Although observed and calculated data curves were similar, absolute torque values differed. Moreover, as the load increased, the angle of peak torque also increased, they concluded that the Nautilus leg curl machine did not adequately alter the weight-stack load to provide a resistive torque suited to the biomechanical capabilities of the knee flexors under the two isokinetic conditions studied.
Further, Folland et al. [22] analyzed the chronic effects of the training by comparing the isometric training with conventional dynamic training, in a variable-cam, at four different muscle lengths using similar relative loads and assessed by both isokinetic and isometric strength measures. Participants’ quadriceps muscle activation was assessed pre-training using the twitch interpolation technique. They trained unilaterally, with one leg doing dynamic and the other isometric training, three times weekly for nine weeks. Maximum quadriceps strength was assessed pre- and post-training at various angles (50, 70, 90 and 110º of knee flexion) and velocities (45, 150 and 300º/s), with electrically stimulated twitches estimating muscle activation. The results suggest that RT significantly increases isometric strength at various angles, with isometric training producing higher gains than dynamic training. Percentage gains varied by angle, with 90º showing the highest gains. RT increased absolute isokinetic strength across velocities, regardless of training type, concluding that training isometrically at four angles produced higher gains in isometric strength across various angles. However, gains in isokinetic strength were similar to those in dynamic training, likely due to higher absolute torque. Continuing to address the variable resistances problem, Folland and Morris [12] used a Cybex Norm isokinetic dynamometer (Lumex Inc., Ronkonkoma, New York, USA) as Pizzimenti [21], to assess the HTC and MRT for leg extension and leg curl exercises by performing isometric (90º) and dynamic (45, 150 and 300º/s) contractions. Folland and Morris [12] verified that peak torque for knee extensors occurred at 60º or 80º, with significant differences in torque values among the three velocities. In contrast, peak torque varied widely for variable-cam machines, occurring at angles from 20º to 100º, despite using a consistent load. However, normalized torque values were generally above 75% of peak torque. When comparing knee extensors to training machines, significant differences were found in six of eight machines, with knee extensors showing higher torque increases in the ascending limb and higher decreases in the descending limb. Therefore, they concluded that knee extension variable-cam machines do not match the muscle group’s angle-torque relationship. This issue likely affects other variable-cam machines, suggesting a need for designs considering joint angle–torque relationships and inertial profiles.
To summarize, there appears to be scarce evidence that the equipment’s MRT can match the HTC except for the work developed by Johnson et al. [15] in 1989. The evaluated variable-cam systems seem to lack accommodation, primarily at the beginning and end of the movement. This could be due to the inertia in the initial part of the movement, which corresponds to a higher amount of force required to lift the weight, and in the final part due to the decreased HTC in that particular part of the movement.
3.2. Muscular Activation
Folland et al. [22] evaluated quadriceps muscle activation using electrically stimulated twitches during maximal voluntary contractions, comparing twitch sizes at rest and during contraction to determine muscle activation levels. By using twitch interpolation, baseline measurements achieved 97.2% maximum muscle activation during maximum isometric contractions. Both training methods increased strength significantly, with isometric training producing higher muscular gains (15.2%) than dynamic training (11.5%).
4. Comparison Between Variable-Cam Machines vs. Other Equipment
Several authors compared variable-cam machines with other equipment regarding force patterns [11,19,20,23,24,25] and muscle activation patterns [19,23,24,25].
In 1987, Häkkinen et al. [15] analyzed the muscle activation and force production of the quadriceps muscles using a David 200 variable-cam system. And, in 1991, Lurvey et al. [20] compared the force required to lift a given weight throughout the ROM of the N-K Table, Nautilus and Universal machine. To comprehend the varying in resistance, Dalleau et al. [11], in 2010, assessed how moment arm can modify torque, velocity, and power production. Further, Walker et al. [23] and Aboodarda et al. [24], in 2011, investigated the acute effects of constant and variable resistance exercise on neuromuscular and endocrine responses and compared the magnitude of applied load and muscle activation in the contribution of variable-cam Nautilus Machine and Elastic Resistance exercises, respectively. Peltonen et al. [25], in 2012, compared the infraspinatus muscle activation between the cable pulley machine and a variable resistance machine. Table 3 summarizes the studies that compared variable-cam machines vs. other equipment.
4.1. Angle-Torque Relationship
Häkkinen et al. [19] and Lurvey et al. [20] evaluated the force production in variable-cam systems. Häkkinen et al. [19] aimed o analyzed the vastus lateralis (VL), vastus medialis (VM) and rectus femoris (RF) muscle activation and force production characteristics during several voluntary contractions performed against variable resistance using the David 200 machine with a variable-cam system, in other hand Lurvey et al. [20] compared force production on the following machines: i) the Nautilus Leg Extension Machine (also described by Aboodarda et al. [24]), ii) the Leg Extension Station on the Universal Centurion Multi-Station Machines, and iii) the N-K Exercise Table. Häkkinen et al. [19] performed eccentric, isometric, isokinetic, and maximal barbell squat tests, recording force and knee angles, including resisting loads, maximal contractions, and extensions at various velocities, the results suggested that in concentric contractions, force production increased from 80° to 120° knee angles, then decreased to 160°, and in eccentric contractions, maximal force increased from 160° to 120°, then decreased to 80°. Lurvey et al. [20] measured the force production at 5-degree increments within the ROM for each machine. Torque curves varied significantly among machines, with apparently linear force curves for Nautilus and Universal , the Nautilus ranged from 120 to 0º, the Universal from 95 to 5º, and the NK Table from 125 to 0º of knee flexion, the results showed significant force differences at each angle across machines, for the Nautilus machine’s force curve ascended throughout the range while the curve of the Universal machine descended. The N-K Table curve ascended until 55º and then descended. It appeared to be differences in the amount of force required to lift a given weight throughout the knee extension range across the three machines, with the N-K Table being the more accommodative and closely resembling the HTC. Additionally, to Häkkinen et al. [19] and Lurvey et al. [20], Dalleau et al. [11] compared the force production in variable-cam systems with a regular pulley. He measured torque-angular velocity and power-angular velocity relationships in two testing sessions. In one session, the authors used a circular pulley, and in the other, they used a non-circular variable-cam. The pulley condition resulted in higher average and peak torque, lower average velocity, and higher peak power than the variable-cam. Theoretical maximal torque was higher with the pulley, while maximal velocity was higher with the variable-cam. A significant difference in the torque-velocity slope was observed when modifying the resistant moment arm. Both mechanisms produced similar power, but the variable-cam had higher theoretical and optimal velocities, while the pulley achieved higher theoretical torque and maximal power. The results suggest that the pulley seems more suitable for torque production, while the variable-cam seems more suitable for velocity and anatomical preservation. Walker et al. [23] examined the acute effects of constant and variable resistance exercise on neuromuscular and endocrine responses. They found that peak 1RM and 10RM loads were higher in constant resistance loadings, while hypertrophic loadings exhibited higher volume loads and more considerable reductions in isometric force. Walker et al. [23] concluded that variable resistances showed benefits for hypertrophy, velocity, and anatomical preservation, making it an excellent choice for rehabilitation due to its higher ROM, steadier shear forces at the joint, and beneficial hypertrophic responses which appears to be aligned with the work of Aboodarda et al. [24] that compared the applied load during 8-RM seated knee extensions using a Nautilus leg extension and an elastic resistance. That analysis revealed significant interactions across phases, repetitions, and training modes. Elastic resistances showed higher external force between 113-180º in the concentric contraction phase. Nautilus leg extension showed a minimal, nonsignificant force decline in later phases. The force-angle curve was an inverted “U” for elastic resistances, highlighting distinct load patterns throughout the ROM. Peltonen et al. [25] compared cable pulley machine and a variable resistance machine in an external rotation exercise for shoulder. He found that the shoulder movement decreased more with increased resistance in the cable pulley machine than in variable resistance exercises. Variable resistance maintained constant velocity at lower loads but decreased at 100%. Peak torque was reached at 45º for the cable machine and 30º for the variable resistance machine. The authors suggest that a variable resistance machine is ideal for glenohumeral rehabilitation due to its larger ROM and steadier shear forces to the joint, which, for those with frontal joint instability, are essential for controlling joint stress and stability.
Overall, variable resistance systems appear to improve training by adjusting to joint angles, ensuring efficient mechanics, and reducing joint stress [11,19,20,23,24,25]. Their adaptability makes them especially beneficial for rehabilitation, where controlled force and range are critical. These studies emphasize the need to choose the right resistance setup to achieve optimal muscle performance while preserving anatomical integrity.
4.2. Muscular Activation
The study of Häkkinen et al. [19] assessed VL, VM and RF muscle activation during eccentric, isometric, and isokinetic leg extension and maximal barbell squat tests. During concentric contractions at 100% load, the muscles analyzed showed equal maximal activation across all knee angles, though muscle activity between 100% and 80% loads differed significantly, being most notably at 160° (~43 and ~24 %MVC). In eccentric contractions at 120% load, VL and VM muscle activation increased with decreasing knee angles from 160° to 120° and all the muscles showed a decrease in muscular activation from 100° to 80°. Concentric contractions with the David machine showed slightly higher average maximal muscular activation in the VL, VM, and RF than isometric contractions, with significant differences noted at 160°. Compared to isokinetic contractions, concentric activations were higher at all angles analyzed with significant differences at the knee angles of 120, 130 and 140º. In barbell squats, activation decreased as knee angle increased from 80° to 160°. Muscle activation was similar between the maximal concentric contraction with the David machine and the maximal squat at the knee angles of 80, 100 and 120° but significantly higher in concentric contraction at 140 and 160° knee angles. The results observed in the study of Häkkinen et al. [19] observed that variable resistance during maximal concentric loading of knee extensors optimizes muscle activation throughout joint movement, which appear to be in line with the findings of Walker et al. [20], who found that from 120°–180°, VL muscle activation and overall muscle activation were higher with variable resistance than constant. And, that isometric force declined across all protocols, more so with hypertrophy (~50% reduction) than strength (~28%), with variable resistance showing slightly larger reductions. They concluded that variable resistance induced stronger muscle activation during hypertrophy, though with somewhat limited post-load recovery in isometric function. Nevertheless, this happened exclusively with hypertrophic loads as the author states the potential advantages of variable RT to hypertrophic training practices and not to maximal strength. Different from Häkkinen et al. [19] and Walker et al. [23], who compared variable resistances with constant resistances, Aboodarda et al. [24] explored the elastic resistances by adding an elastic to carriable-cam system. They used randomized measurements in the variable-cam Nautilus Machine, elastic tubing with initial length, and elastic tubing with a 30% decrement of initial length, this study showed significantly higher muscle activation with the variable-cam Nautilus Machine during early concentric and late eccentric phases than elastic tubbing but no significant differences during other contraction phases, suggesting that reducing the initial length of elastic material by 30% can achieve a muscular activation like the one achieved in Nautilus variable-cam machine. On the other hand, Peltonen et al. [25] compared the muscle activity between the cable pulley machine and a variable resistance machine with two single, separate repetitions against each workload set to secure accurate and successful signals from the electrodes, force sensors, and goniometric records. They found that the variable-cam machine had a higher muscular activation for the infraspinatus and trapezius descendens more visible at heavy loads, while supraspinatus muscle activity increased with resistance on both machines. At 100% resistance, muscular activity differences were significant between the start and end of the motion range. The variable resistance machine showed higher infraspinatus muscle activation, especially at smaller angles with higher resistance. The muscle medial deltoid was inactive at 10% load but showed different muscle activity patterns at higher resistance between the two machines.
5. Testing Procedures to Analyze the Angle-Torque Relationship in Variable-Cam Machines
Table 4 summarizes the testing procedures used in the different studies to analyze the angle-torque relationship in variable-cam machines. Angle-torque relationship determination varies between theoretical and direct determination, however in a balanced way, with 5 studies determining the angle-torque relationship theoretically [11,12,14,15,20], 6 studies determining the angle-torque relationship directly [17,19,22,23,24,25] and 1 study determining it both ways [21]. Also, in the 12 studies included in this review, nine different analyzed movements were found, being the leg extension exercise the most studied (n = 7), followed by leg curl (n = 3) and biceps curl (n = 3), and by triceps extension (n = 1), shoulder external rotation (n = 1), chest-fly (n = 1), pullover (n = 1), squat (n = 1) and leg press (n = 1). Instruments also varied between cameras (photography), used exclusively for theoretical determination, goniometers, load cells, force transducers, angle cells, isokinetic dynamometers, and an electromechanical isometric leg extension device. Evaluated angles vary between a single measure, to 4 measures, to 5º increments, and throughout the entire ROM. Of the 12 studies included, only 1 study used more than one contraction type (dynamic, isometric, and isokinetic), the other studies used only 1 type of contraction to assess the angle-torque relationship, and those were exclusively assessed by dynamic (n = 6) or isometric contractions (n = 5). Regarding sets, the results also differ from 25 sets to only 1. However, in repetitions, the results suggested fewer repetitions in dynamic contractions (1 to 2) and fewer time in isometric contractions (~3 s). Of the 12 studies, only 4 presented information regarding the rest period in its methods, and it varies between 20 s between sets to 5 minutes maximum. For the loads they also vary between lightweight loads to 120%RM, with several studies choosing to define the weight using a 1RM estimation and others using a predefined weight. Angular velocities, when applied, point to slower repetitions (30-60º/s).
Given the preceding information, the literature suggests that these assessments should be performed by estimating the angle-torque relationship for 4-5 angles when assessed isometrically and throughout the entire ROM when assessed dynamically. Regarding sets and repetitions, it appears that fewer repetitions should be performed (1 to 2) for 2-4 sets, depending on how many conditions or weight loads will be performed. Rest time should be defined so that there is no accumulated fatigue when the next set is completed, and its period should consider the type of contraction and how many repetitions or contraction times were defined. Angular velocities should remain low (30-60º/s) to decrease the impact of accelerations on the applied force.
6. Practical Applications
Variable-cam machines offer a consistent muscle activation throughout the ROM, when designed accordingly to the HTC, which might make them effective tools for RT and rehabilitation. Isometric exercises enhance angle-specific strength, while isokinetic training promotes balanced strength adaptations. Proper equipment adjustments are essential to align resistance with individual strength curves, thereby minimizing injury risk and optimizing training outcomes. However, an analysis of multiple exercise machines revealed a poor alignment between MRT and HTC, potentially limiting their effectiveness. In contrast, variable resistance exercises have been shown to optimize muscle activation and neuromuscular adaptations, making them particularly beneficial for hypertrophic training, rehabilitation and angle specific development. To enhance biomechanical compatibility – particularly the angle-torque relationship – it is imperative to redesign variable-cam systems to match physiological strength profiles better. Such advancements could improve neuromuscular efficiency, reduce mechanical stress, and maximize the efficacy of RT interventions.
7. Conclusions
In conclusion, this narrative review analyzed the force production patterns of variable and constant resistances as the muscle activation provided by that equipment, mainly aiming to analyze its strength curves and to determine whether they accommodate the HTC. Several authors concluded that the evaluated variable resistance machines do not offer an MRT that matches the HTC. Nevertheless, and even though the variable-cam systems currently available do not match the HTC, it is not the case with muscle activation which is higher when using variable resistances compared to constant resistances.
The existent literature mainly focusses their research on understanding the acute effects of variable resistance, disregarding its long-term impact on the participants and athletes. However, variable resistance has been shown as a valuable resource to benefit hypertrophy training, rehabilitation and angle specific development.
As technology continues to evolve, RT should continue to evolve, whilst it is imperative to redesign variable-cam systems that offer a strength aligned with the HTC.
8. Future Direction
Future research must develop and validate new variable resistances that adequately accommodate the HTC and consequently achieve the benefits that are being theoretically developed by previous studies. Upcoming research should compare the neuromuscular activation patterns, muscle mechanical properties and torque production during exercises performed in variable-cam machines vs. isokinetic devices, to have an in-depth knowledge whether using the variable-cam machine produces the same changes in the neuromuscular activation, muscle mechanical properties or torque as when using an isokinetic device. This could be a useful tool for coaches and researchers that can use the variable-cam machine in resistive torque capabilities during their training programs with better reliability and feasibility. As well as its participation in rehabilitation and injury prevention, given the accommodate resistance. Which could provide coaches with more tools to work with their athletes and enhance sports longevity. Also, the exercises previous studied tend to be single joints exercises (biceps curl, leg extension, leg flexion, …), which might reveal the importance to include in further research more complex exercises with multi-joint patterns, such as presses, pulls or squats. Experimental studies should also be considered as they are the gold standard to investigate and, therefore, compare and comprehend if variable resistance machines have a higher impact on muscular development when compared to other training methods such as pulley systems, free weights, elastic bands, or chains.
Author Contributions
Conceptualization, RCM and AC; methodology, RCM, DLM and AC; software, RCM, DLM, RM and AC; validation, RCM, DLM and AC; formal analysis, RCM, DLM, RM, HDL, DAM and AC; investigation, RCM, DLM, RM and AC; resources, RCM, DLM, HDL, DAM and AC; data curation, RCM, DLM, RM and AC; writing—original draft preparation, RCM, DLM and AC; writing—review and editing, RCM, DLM, RM and AC; visualization, RCM, DLM, RM and AC; supervision, RCM, DLM and AC; project administration, RCM, DLM and AC; funding acquisition, RCM, DLM, HDL, DAM and AC. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Portuguese Foundation for Science and Technology (FCT), I.P., under project number UIDP/04045/2020.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- McMillin, C.; Melton, B.; Murray, N.; D’Adamo, C. Machine Resistance Curve Analysis of Seven Resistance Training Machines: Original Research. RDSP 2024, 4. [Google Scholar] [CrossRef]
- Frost, D.; Cronin, J.; Newton, R. A Biomechanical Evaluation of Resistance: Fundamental Concepts for Training and Sports Performance. Sports Med 2010, 40, 303–326. [Google Scholar] [CrossRef]
- Nuzzo, J.; Pinto, M.; Nosaka, K. Connective Adaptive Resistance Exercise (CARE) Machines for Accentuated Eccentric and Eccentric-Only Exercise: Introduction to an Emerging Concept. Sports Med 2023, 53, 1287–1300. [Google Scholar] [CrossRef]
- Foran, B. Facility considerations: Advantages and disadvantages of isokinetics, variable resistance and free weights. Strength Cond J 1985, 7. [Google Scholar] [CrossRef]
- Gołaś, A.; Pietraszewski, P.; Roczniok, R.; Królikowska, P.; Ornowski, K.; Jabłoński, T.; Kuliś, S.; Zając, A. Neuromuscular Control during the Bench Press Exercise Performed with Free Weights and Pneumatic Loading. Appl Sci 2024, 14. [Google Scholar] [CrossRef]
- Spudić, D.; Cvitkovič, R.; Šarabon, N. Assessment and Evaluation of Force–Velocity Variables in Flywheel Squats: Validity and Reliability of Force Plates, a Linear Encoder Sensor, and a Rotary Encoder Sensor. Appl Sci 2021, 11. [Google Scholar] [CrossRef]
- Pipes, T. Variable resistance versus constant resistance strength training in adult males. Eur J Appl Physiol Occup Physiol 1978, 39, 27–35. [Google Scholar] [CrossRef] [PubMed]
- Wallace, B.; Bergstrom, H.; Butterfield, T. Muscular bases and mechanisms of variable resistance training efficacy. Int J Sports Sci Coach 2018, 13, 1177–1188. [Google Scholar] [CrossRef]
- Smith, F. Strength Training Modes: Dynamic Variable Resistance and the Universal System. Strength Cond J 1982, 4. [Google Scholar] [CrossRef]
- Fuentes-Garcia, M.; Malchrowicz-Mosko, E.; Castaneda-Babarro, A. (2024). Effects of variable resistance training versus conventional resistance training on muscle hypertrophy: A systematic review. Sport Sci Health 2024, 20, 37–45. [Google Scholar] [CrossRef]
- Dalleau, G.; Baron, B.; Bonazzi, B.; Leroyer, P.; Verstraete, T.; Verkindt, C. The influence of variable resistance moment arm on knee extensor performance. J Sports Sci 2010, 28, 657–665. [Google Scholar] [CrossRef]
- Folland, J.; Morris, B. Variable-cam resistance training machines: Do they match the angle – torque relationship in humans? J Sports Sci 2008, 26, 163–169. [Google Scholar] [CrossRef]
- Syrotuik, D. Resistive torque analysis of the nautilus leg extension machine. Doctoral Thesis, Edmonton, AB: University of Alberta, 1984. [Google Scholar]
- Harman, E. Resistive torque analysis of five Nautilus exercise machines. 1983, 7, 248–261. [Google Scholar]
- Johnson, J.; Colodny, S.; Jackson, D. Human Torque Capability Versus Machine Resistive Torque for Four Eagle Resistance Machines. Strength Cond J 1990, 4. [Google Scholar]
- Kulig, K.; Andrews, J.; Hay, J. Human Strength Curves. Exerc Sport Sci Rev 1984, 12. [Google Scholar] [CrossRef]
- Harman, E. Resistance Training Modes: A Biomechanical Perspective. Strength Cond J 1994, 16. [Google Scholar] [CrossRef]
- Hakkinen, K.; Komi, P.; Kauhanen, H. Scientific Evaluation of Specific Loading of the Knee Extensors with Variable Resistance, Isokinetic and Barbell Exercises. In Medicine and Sport Science, 26th ed.; Marconnet, P, Ed.; S. Karger A.G.: Basel, Switzerlan, 1987; Volume 26, pp. 224–237. [Google Scholar]
- Lurvey, P.; Chandler, J.; Malone, T. Differences in Force Production on Various Isotonic Loading Devices. Isokinet Exerc Sci 1991, 1, 75–80. [Google Scholar] [CrossRef]
- Pizzimenti, M. Mechanical analysis of the Nautilus leg curl machine. Can J Sport Sci 1992, 17, 41–48. [Google Scholar]
- Cabell, L.; Zebas, C. Resistive Torque Validation of the Nautilus Multi-Biceps Machine. Strength Cond J 1999, 13. [Google Scholar]
- Folland, J.; Hawker, K.; Leach, B.; Little, T.; Jones, D. Strength training: Isometric training at a range of joint angles versus dynamic training. J Sports Sci 2005, 23, 817–824. [Google Scholar] [CrossRef]
- Walker, S.; Taipale, S.; Nyman, K.; Kraemer, J.; Häkkinen, K. Neuromuscular and hormonal responses to constant and variable resistance loadings. MSSE 2011, 43, 26–33. [Google Scholar] [CrossRef] [PubMed]
- Aboodarda, S.; Shariff, M.; Muhamed, A.; Ibrahim, F.; Yusof, A. Electromyographic Activity and Applied Load During High Intensity Elastic Resistance and Nautilus Machine Exercises. J Hum Kinet 2011, 30, 5–12. [Google Scholar] [CrossRef] [PubMed]
- Peltonen, H.; Arokoski, J.; Kallinen, M.; Pullinen, T. Muscle loading and activation of the shoulder joint during humeral external rotation by pulley and variable resistance. J Electromyogr Kinesiol 2012, 22, 424–430. [Google Scholar] [CrossRef] [PubMed]
Figure 1.
Representation of a preferable strength curve offered by the equipment. Adapted from Cabell and Zebas [17].
Figure 1.
Representation of a preferable strength curve offered by the equipment. Adapted from Cabell and Zebas [17].
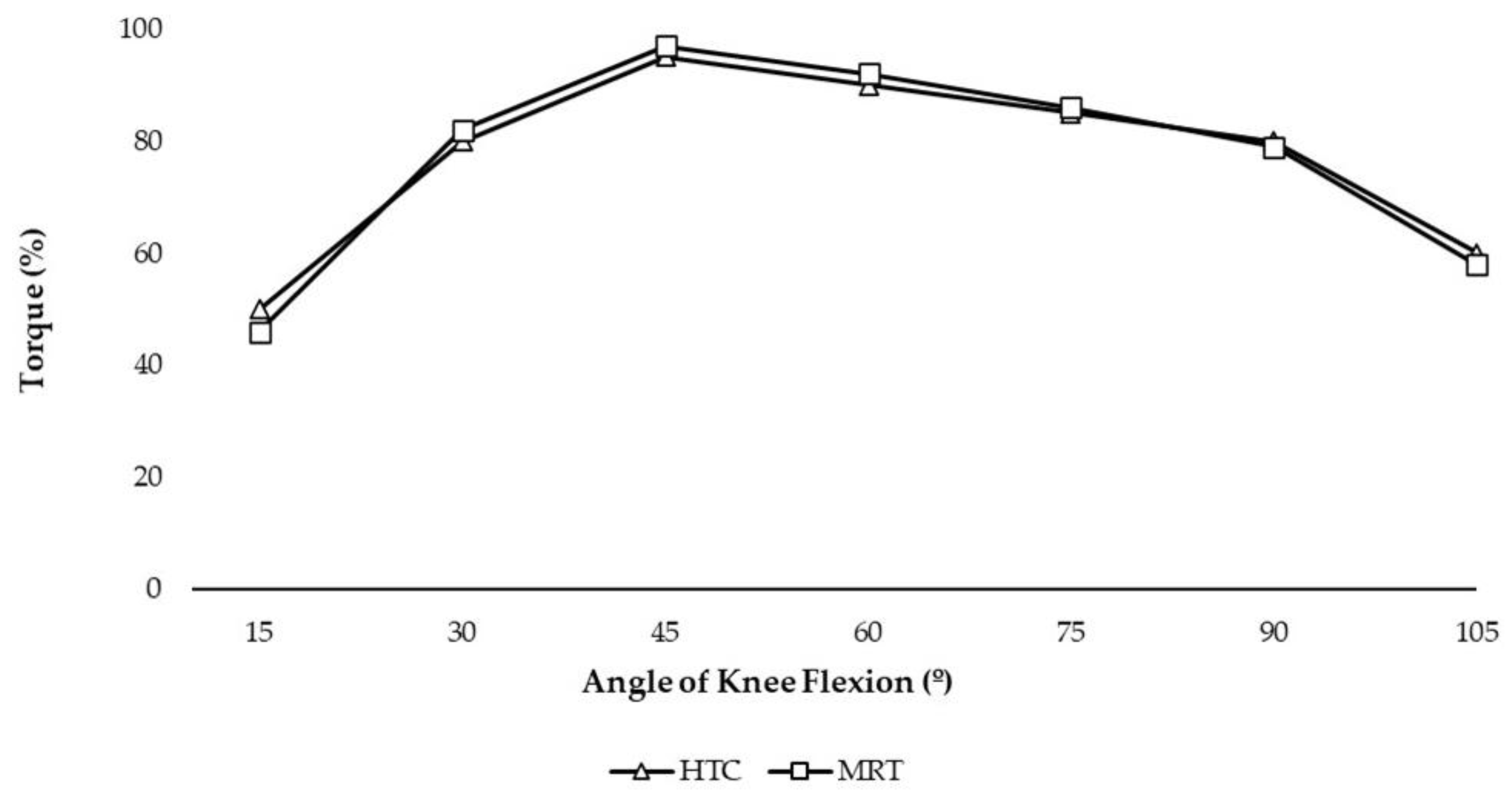
Figure 2.
Representation of a non-preferable strength curve offered by the equipment. Adapted from Cabell and Zebas [17].
Figure 2.
Representation of a non-preferable strength curve offered by the equipment. Adapted from Cabell and Zebas [17].
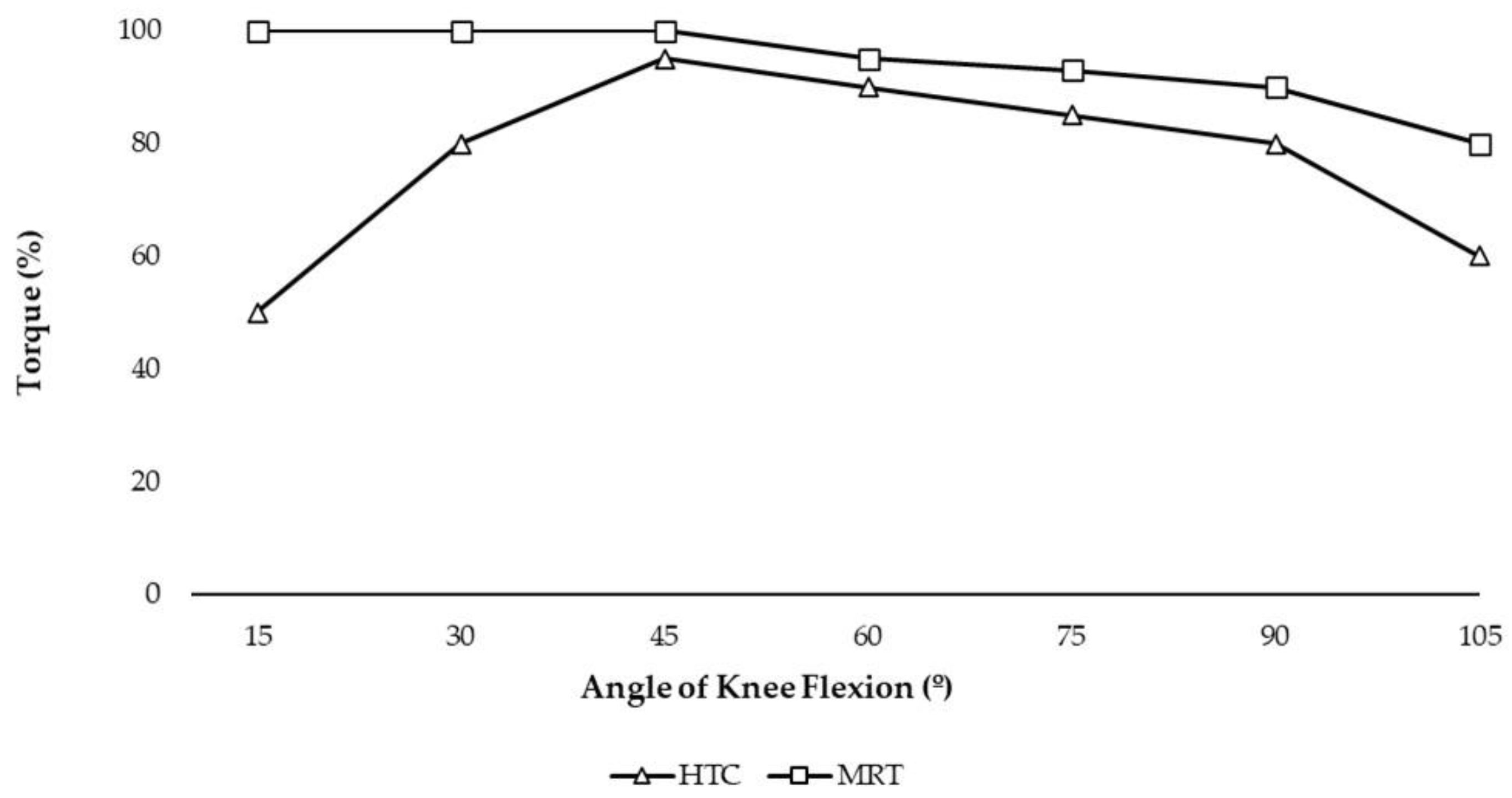

Table 1.
Summary of the studies included in the review.
| Author/ Year | Title | Comparison | Aim | Participants |
| Harman (1983) [14] | Resistive Torque Analysis of 5 Nautilus Exercise Machines | Variable-cam Machines Vs. Isokinetic Devices | To conduct a qualitative biomechanical analysis of five Nautilus exercise machines and determine their ability to match human torque capability curves. | Not applicable. |
| Häkkinen et al. (1987) [19] | Scientific Evaluation of Specific Loading of the Knee Extensors with Variable Resistance, “Isokinetic” and Barbell Exercises | Variable-cam Machines Vs. Other Equipment | To investigate the knee extensor muscle activation and force production characteristics during various voluntary contractions performed against variable resistance. | Five sportsmen with a long experience in bodybuilding and powerlifting (27.0 ± 3.0 years, 78.2 ± 7.1 kg, 175.1 ± 4.5 cm). |
| Johnson et al. (1990) [15] | Human Torque Capability Versus Machine Resistive Torque for Four Eagle Resistance Machines | Variable-cam Machines Vs. Isokinetic Devices | To conduct a biomechanical analysis of four variable resistance Eagle machines to determine their ability to accommodate the strength curves of female athletes. | Ten female college athletes (20.2 ± 1.5 years, 63.9 ± 7.0 kg). |
| Lurvey et al. (1991) [20] | Differences in Force Production on Various Isotonic Loading Devices | Variable-cam Machines Vs. Other Equipment | To compare the force required to lift a given weight throughout the ROM of the N-K Table, Nautilus and Universal machines, and to quantitatively document the force and torque curves. | Not applicable. |
| Pizzimenti (1992) [21] | Mechanical Analysis of the Nautilus Leg Curl Machine | Variable-cam Machines Vs. Isokinetic Devices | To assess the capability of the Nautilus leg curl machine to reflect changes in isokinetic resistance torque that matches the human torque pattern generated by the knee flexor muscle group. | Twenty physically active men (25.8 ± 3.8 years, 74.9 ± 10.9 kg, 179.0 ± 12.0 cm). |
| Cabell and Zebas (1999) [17] | Resistive Torque Validation of the Nautilus Multi-Biceps Machine | Variable-cam Machines Vs. Isokinetic Devices | To validate the resistance of the Nautilus Multi-Biceps Machine with the strength curves of the elbow flexors. | Ten healthy and physically active male university students (30.2 ± 9.3 years, 85.9 ± 19.9 kg, 184.0 ± 9.0 cm). |
| Folland et al. (2005) [22] | Strength Training: Isometric Training at a Range of Joint Angles Versus Dynamic Training | Variable-cam Machines Vs. Isokinetic Devices | To compare isometric training with conventional dynamic training at four different muscle lengths using similar relative loads and assessed by both isokinetic and isometric strength measures. | Thirty-three healthy males (21.5 ± 2.1 years, 76.5 ± 8.6 kg, 181.0+ 6.0 cm). |
| Folland and Morris (2008) [12] | Variable-cam RT Machines: Do They Match the Angle-Torque Relationship in Humans? | Variable-cam Machines Vs. Isokinetic Devices | To compare the resistive torque profile of eight knee extension, variable-cam RT machines with knee extensor torque capability over the same range of movement. | Ten healthy young men (20.0 ± 1.0 years, 77.0 ± 6.0 kg, 1.78.0 ± 0.1 cm). |
| Dalleau et al. (2010) [11] | The Influence of Variable Resistance Moment Arm on Knee Extensor Performance | Variable-cam Machines Vs. Other Equipment | To assess how the variable resistance moment arm can modify torque, velocity, and power production during explosive knee extension. | Fourteen physically active males and familiar with RT (24.0 ± 2.0 years, 71.6 ± 7.3 kg, 176.0 ± 5.0 cm). |
| Walker et al. (2011) [23] | Kinetic and Electromyographic Analysis of Single Repetition Constant and Variable Resistance Leg Press Actions | Variable-cam Machines Vs. Other Equipment | To investigate the acute effects of constant and variable resistance exercise on neuromuscular and endocrine responses during maximal strength and hypertrophic loadings. | Thirteen healthy young men (28.4 ± 3.7 years, 78.7 ± 10.2 kg, 180.3 ± 3.9 cm). |
| Aboodarda et al. (2011) [24] | Electromyographic Activity and Applied Load During High Intensity Elastic Resistance and Nautilus Machine Exercises | Variable-cam Machines Vs. Other Equipment | To quantify and compare the magnitude of applied load and muscle activation during 8-RM seated knee extension in the contribution of variable-cam Nautilus Machine and Elastic Resistance exercises. | Sixteen healthy volunteers (female: N = 7, 22.4 ± 4.7 years, 60.0 ± 6.2 kg, 158.0 ± 3.0 cm; male: N = 9, 24.0 ± 3.6 years, 78.1 ± 7.2 kg, 174.0 ± 7.0 cm). |
| Peltonen et al. (2012) [25] | Muscle Loading and Activation of the Shoulder Joint During Humeral External Rotation by Pulley and Variable Resistance | Variable-cam Machines Vs. Other Equipment | To compare the muscle activation of the primary external rotator, infraspinatus, between the cable pulley machine and a variable resistance machine. | Eleven healthy physically active men (28.0 ± 3.0 years). |
RT: Resistance training; ROM: Range of motion; RM: Repetition maximum.
Table 2.
Summary of studies that compared variable-cam machines vs. isokinetic devices.
| Author/ Year | Methods | Results | Main findings |
| Harman (1983) [14] | The machines’ ROM was analyzed via photographs, and the weight chain to variable-cam pivot distance was measured. MRT was calculated and compared to HTC using computer graphics. | MRT increased for chest-fly and knee flexion, while HTC decreased by 80%. Knee extension MRT peaked at 110º and dropped by 50%. Arm-curl MRT varied with HTC, dipping 59% at extremes. Pullover MRT/HTC peaked at 90º. | MRT and HTC patterns showed minimal alignment. Significant redesigns are required to match MRT with human strength curves better. |
| Johnson et al. (1990) [15] | HTC was isometrically assessed on an isokinetic dynamometer. A goniometer measured one subject’s joint positions to determine MRT patterns. Computer graphics compared HTC curves with MRT curves. | MRT and HTC align well for knee extension up to 100º. For knee flexion, MRT and HTC are well aligned. Elbow flexion MRT peaks at 120º, differing from HTC. | The MRT of the examined machines matched the HTC. |
| Pizzimenti (1992) [21] | Data on HTC and Nautilus leg curl MRT patterns were collected at 30 and 60°/s. MRT was measured by coupling the machine to the dynamometer, and the moment arm was determined from photographs. | HTC peaked at 30° initially, decreasing with flexion. Peak torque values were 93.2 N·m (23.4°) and 88.9 N·m (27.5°). MRT data showed 88% maximum torque at knee flexion onset, peaking at 64.5° and decreasing to 94% in the final. | The Nautilus leg curl machine failed to adjust its MRT, poorly aligning with the biomechanical needs of knee flexors in tested conditions. |
| Cabell and Zebas (1999) [17] | Arm curl tests were conducted mimicking the Nautilus Multi-Biceps Machine. Resistance arm testing used an isokinetic dynamometer with varying speeds (30º, 45º, 60º/s). | Torque capacity decreased across conditions as angular velocity increased. Resistance torque curves declined slightly. Significant torque differences occurred at 15° and 30° flexion, but none were found between 45° and 75°. | The resistance of the Nautilus Multi-Biceps Machine did not match the strength curves of the elbow flexors throughout the entire ROM. |
| Folland et al. (2005) [22] | Participants trained quadriceps unilaterally, with one leg doing dynamic and the other isometric training, three times weekly for nine weeks at 75%RM. Strength and muscle activity were assessed. | Initially, the angle–torque relationships of isometrically and dynamically trained legs were similar. RT increased absolute isokinetic strength, with higher gains at 90º/s than 300º/s; however, the results differ between conditions. | Isometric training produced higher gains in isometric strength across angles. Isokinetic strength gains were similar for both training methods. |
| Folland and Morris (2008) [12] | The angle-torque relationship of the knee extensors was assessed isometrically and dynamically and compared with the static angle–torque relationship of eight variable-cam knee extension machines. | Peak torque occurred at 60º or 80º, with significant differences among velocities. Torque was ~75% at 100º and ~40% at 20º. Variable-cam machines torque varied from 20º to 100º. Significant differences were found in six machines. | Variable-cam machines mismatch the muscle’s angle-torque relationship. |
RT: Resistance training; MRT: Machine resistive torque; HTC: Human torque capability; ROM: Range of motion; RM: Repetition maximum.
Table 3.
Summary of studies that compared variable-cam machines vs. other equipment.
| Author/ Year | Methods | Results | Main findings |
| Häkkinen et al. (1987) [19] | The study used the David 200 variable-cam to test knee extensors. Were performed concentric, eccentric, isometric, squats, and isokinetic tests recording force, knee angle, and muscle activity. | Concentric contraction force peaked at 60°, declining at 20°, with the highest muscle activation. Eccentric forces exceeded concentric at multiple angles. Squats showed decreased muscle activation across angles. | Variable resistance may create optimal conditions for high muscle activation throughout the entire ROM. |
| Lurvey et al. (1991) [20] | Force was measured on three leg extensions using a force gauge and two goniometers. Static readings were taken at 5º increments throughout the entire ROM. | Nautilus increased from 9.7 lbs (120º) to 20.2 lbs (0º). Universal decreased from 41.1 lbs (95º) to 27.9 lbs (5º), while N-K Table peaked at 55º. Torque curves differed significantly (r = -0.912). | Differences in force required to lift weights exist across the N-K Table, Nautilus, and Universal machines. The N-K Table closely matches HTC. |
| Dalleau et al. (2010) [11] | Torque–angular velocity and power–angular velocity relationships were assessed in a circular pulley and in a non-circular variable-cam during maximal knee extensions with different loads (40 to 80 kg). | The pulley system produced higher average and peak torque, increasing linearly with load, while velocity decreased. The average power was similar, with higher peak power for the pulley. | Variable-cam’s theoretical and optimal velocities favor velocity and anatomical preservation. Pulley produced higher theoretical torque and maximal power, highlighting torque production. |
| Walker et al. (2011) [23] | In leg extension, four loadings were performed (maximal strength and hypertrophic loadings using both constant and variable resistance). Blood samples were collected, and muscle activity was assessed. | Peak 1RM and 10RM loads were higher with constant resistance. Variable resistance showed higher muscle activation, while isometric force and muscle activation decreased post-loading. | Neuromuscular responses differed between constant and variable hypertrophic loadings, which caused higher neuromuscular fatigue. It also benefits hypertrophic practices. |
| Aboodarda et al. (2011) [24] | 8-RM knee extensions were performed with variable-cam Nautilus machine, elastic tubing with initial length, and elastic tubing with a 30% decrement of initial length. Muscle activity was recorded. | Variable-cam Nautilus machine showed higher muscle activation during early concentric and late eccentric phases than elastic tubing. No significant differences occurred between thr variable-cam Nautilus machine and tubing in other phases. | Reducing the initial length of elastic material by 30% in an external recoil device can achieve neuromuscular activation similar to that of the variable-cam Nautilus machine. |
| Peltonen et al. (2012) [25] | Muscle activity was measured with variable resistance and cable pulley in external rotation exercise, with resistance increased from light to maximum load. | Variable resistance maintained angular velocity at lower loads and had higher muscle activity at heavier loads. Torque peaked at 45º (pulley) and 30º (variable). ROM decreased with cable pulleys. | Variable resistance exercises are ideal for glenohumeral rehabilitation due to their larger ROM, better infraspinatus muscle activation, and steadier shear forces at the joint. |
ROM: Range of motion; RM: Repetition maximum.
Table 4.
Summary of studies testing procedures to analyze the angle-torque relationship in variable-cam machines.
Table 4.
Summary of studies testing procedures to analyze the angle-torque relationship in variable-cam machines.
| Author/ Year | Angle-torque determination | Exercises | Instruments | Angles | Contraction | Sets and repetitions | Rest | Load | Angular velocity |
| Harman (1983) [14] | Theoretical determination. | Biceps curl; Chest fly; Pullover; Leg extension; Leg curl. |
Camera (photography). | NA. | Dynamic. | NA. | NA. | NA. | NA. |
| Häkkinen et al. (1987) [19] | Direct determination. | Squat; Leg extension. |
Strain gauge; Goniometer. |
80, 100, 120, 140, and 160º of knee extension. | Dynamic; Isometric; Isokinetic. |
4×1 (concentric); 3×1 (eccentric); 2×2.5 s for each angle (isometric); 3×1 (isokinetic). |
NA. | 100, 40, 60 and 80%RM (concentric); 100, 110, and 120%RM (eccentric). |
20, 40 and 60º/s (isokinetic). |
| Johnson et al. (1990) [15] | Theoretical determination. | Tricep extension; Biceps curl; Leg extension; Leg curl. |
Camera (photography); Goniometer. |
0, 20, 40, 60 and 80% of the ROM. | Isometric. | NA. | NA. | NA. | NA. |
| Lurvey et al. (1991) [20] | Theoretical determination. | Leg extension. | Force gauge; Goniometer. |
5-deg increments throughout ROM. | Isometric. | 3 sets. | NA. | 20lbs. | NA. |
| Pizzimenti (1992) [21] | Theoretical and direct determination. | Leg curl. | Isokinetic dynamometer; | Throughout the entire ROM (direct determination); 5-deg increments throughout ROM (theoretical determination). |
Dynamic. | 25×1 (direct determination. | NA. | Randomized 2-10 plates (107-463.8N) | 30 and 60º/s (direct determination. |
| Cabell and Zebas (1999) [17] | Direct determination. | Biceps curl. | Isokinetic dynamometer; | Throughout the entire ROM. | Dynamic. | 25×1 | NA. | Randomized 5-7 plates (average 5 256.1N). | 45, 30 and 60º/s. |
| Folland et al. (2005) [22] | Direct determination. | Leg extension. | Dynamometer. | 50, 70, 90 and 110º, randomly assigned. | Isometric. | 2×3s for each angle. | 20s between contractions; >30s between angles. |
NA. | NA. |
| Folland and Morris (2008) [12] | Theoretical determination. | Leg extension. | ‘‘S’’-beam load cell. | 20, 40, 60, 80, and 100º | Isometric. | 2 trials per angle. | NA. | ~ 5, 15, and 25kg | NA. |
| Dalleau et al. (2010) [11] | Theoretical determination. | Leg extension. | Force transducer; Potentiometer. |
Throughout the entire ROM. | Dynamic. | 2×1 for each load. | 2min. | 40–80kg in increments of 5kg. | Maximum velocity. |
| Walker et al. (2011) [23] | Direct measurement. | Leg press. | Electromechanical isometric leg extension device. | 107º (1/3) of knee extension. | Isometric. | 3-4×3s. | NA. | NA. | NA. |
| Aboodarda et al. (2011) [24] | Direct measurement. | Leg extension. | Force transducer; Goniometer. |
Throughout the entire ROM. | Dynamic. | 1×8. | 1s between reps. | 8RM. | 1.5s concentric and 1.5s eccentric. |
| Peltonen et al. (2012) [25] | Direct measurement. | Shoulder external rotation. | Force transducer; Angle sensor. |
Throughout the entire ROM. | Dynamic. | 2×2. | 2-5min. | 10, 50 and 80%RM. | Self-selected. |
ROM: Range of motion; RM: Repetition maximum.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



