Submitted:
06 August 2025
Posted:
06 August 2025
You are already at the latest version
Abstract
Achieving precise pesticide spraying tasks in irregular farmland faces multiple challenges such as multi-UAV path coordination, coverage efficiency optimization, and energy consumption control, especially in environments with complex terrain and significant changes in crop density. To this end, this paper proposes a multi-UAV collaborative coverage and path planning model (SI-MUCCPP) based on swarm intelligence, which is improved on the basis of the existing artificial bee colony algorithm (ABC), and integrates the Voronoi adaptive zoning strategy and dynamic Dubins curve path planning method with area awareness. Model includes three core innovations: (1) The adaptive regional subdivision module, which constructs the load- balanced Voronoi division of irregular farmland by introducing crop density and terrain complexity weights. (2) The role-dividing group collaboration mechanism simulates the foraging behavior of bee colonies, and dynamically assigns the roles of detectors, boundary followers and replenishers to improve the efficiency of multi-machine cooperation and reduce repeated spraying. (3) The hybrid fitness function design comprehensively considers the coverage integrity, flight time, energy consumption minimization and obstacle avoidance constraints, and introduces an improved search operator based on reverse learning and local perturbation to achieve optimal path convergence under complex terrain in the global-local two-stage iteration. Experimental results show that the proposed SI-MUCCCPP model improves the coverage efficiency by 17.6% and reduces the total energy consumption by 12.3% compared with the traditional method.
Keywords:
Swarm Intelligence
; Irregular Farmlands
; Coverage Path Planning
; Precision Pesticide Spraying
I. Introduction
Precision agriculture is one of the areas that the United States Department of Agriculture (USDA) has supported in recent years, in particular, seeking the holy grail, "planting, spraying and fertilizing with high precision at the right time, in the right amount [1], in the right place" process management in agriculture.
Precision agriculture, as cited in USDA reports and GAO technical assessments, represents further developments to enhance resource input use-efficiencies and increased sustainability, with new emerging sensor technologies providing the key ingredients including GPS, GIS, variable rate technology (VRT) with a promising reduction in risk of crop contamination from unnecessary applications of chemical fertilizers and pesticides [2]. This is especially true with the USDA commenting that with the technologies development has also seen hundreds of millions of dollars expenditures during the past three years by USDA and NSF on technology development, research, and outreach related to sensors, automated spraying systems, and data decision support tools, as recent work has shown that generative-AI frameworks can proactively mitigate incidents in large-scale infrastructure [13] , thereby inspiring smarter agricultural operations.
The labour shortage in the United States, and in particular rural agricultural locations has become more pronounced as manual high-intensity work has reached some limits. Multi- UAV collaboration is gaining considerable attention as a potential solution, with examples incorporated in agricultural drone spraying systems displacing manual control, with manual control costs are affected by complex terrain or irregular field shapes, where the mobility and accuracy of the drone is seen as an advantage when compared to traditional mechanization or aerial spraying methods [3]. The report observations included farms expanding where the dependency on external mechanical forces were also adopted with increasing UAV services used to rationalize pressure induced from labour shortages on farm.
That said multi-drone spraying operations are large complexities with route planning strategies in distorted rural farmland or hilly field layouts. In simple terms, route planning can be typically be modeled conventionally as grid squares or geometric shape which can complicate coverage routines while maintaining trajectory comply-ability, collision risk degrees, and energy control [4]. In addition to the irregular boundaries, crop density variability, complex topography present technical problems that generally do not exist other problems. Notably, to date there is not yet any systematic swarm intelligence based solutions to problems of how multiple UAV's help to partition mission space, construct and optimize route paths, and which path is dynamically the most appropriate pathway when avoiding obstacles [5] .
II. Related Work
Mukhamediev et al. (2023) [6] propped up drone cooperation and regional feature perception to optimize global coverage paths with varying complexity in farmland. Nonetheless, the process is most appropriate to plots that are regular or near-regular, meaning flexibility in division and deviations in path planning are still restricted in irregular plots. Huang et al. (2024) [7] formulated a task allocation and path planning model for UAV collaborative spraying tasks in hilly areas, which they modelled as a single warehouse-single endpoint multi-traveller problem (mTSP) and it is a way to generate paths based on terrain relief feature characteristics. Xu et al. (2022) [8] imposed constraints of multiple dosing and charging points and achieve refined scheduling of multiple UAV tasks in segmented farmland, whilst heuristically minimizing the path energy consumption and time cost, while Chen (2023) demonstrated that advanced data-mining techniques can further enhance analytical performance in similar pipelines [14] .
To propose a more realistic method of estimating coverage volume, while developing an effective path planning algorithm solution in bounded environments, to circumvent flying off of and potentially colliding with the target area boundary, Vazquez-Carmona et al. (2022) [9] combined the paraboloid sprinkler model that accounted for the effective sprayer and, Hu et al. (2023) [10] reformulated the CPP problem statement into an online optimization searching for a feasible solution, and realized real time information sharing among UAVs with the environmental infographic fusion strategy, based on distributed deep Q-learning online coverage paths generation algorithm.
Guo et al. (2025) [11] explored merging artificial intelligence and swarm intelligence strategies into a multi-UAV cooperative decision making module that produced planned paths for optimal coverage vector, while influencing several variables like irregular crop density and uneven terrain. Plessen (2025) [12] started the route sequence using the TSP method, later generating specific routes with regional coverage planning, while testing the methodology with 3 actual test rides.
III. Methodologies
A. Adaptive Zone Division and Task Modeling
We represent the irregular farmland area as a two- dimensional polygon set ⊂ ℝ2 , where there are N drones, whose initial positions constitute the set P = {pi = (xi,yi)兴1 。 Each UAV is responsible for a non-overlapping subregion i, which satisfies the division constraints of Equation 1:
where i represents the mission sub-area assigned to the i-th UAV to ensure that the global coverage does not overlap with the mission.
To reflect the spraying load in different areas, we introduce a weighting function based on crop density d(x ,y) and terrain complexity c(x ,y) . This function synthesizes the intensity of the spraying task per unit area and serves as a regulator for
Voronoi' s division, defined as in Equations 2 and 3:
where α and β represent the weighted contribution of crop density and terrain complexity to the intensity of the spraying task, respectively. This function can be assigned based on remote sensing images or prior knowledge, so as to guide the Voronoi division results to be more in line with the actual load requirements.
w(x,y) = α . d(x,y) + β . c(x,y),
α +β = 1, α, β ∈ [0,1],
Based on the above weight functions, we construct a weighted Voronoi graph to realize the load balancing area division of irregular farmland. Each subregion i is defined as a collection of points that satisfy the following Equation 4 conditions:

In the formula, Ⅱ pi 一 (x,y) Ⅱ represents the Euclidean distance between point (x,y) and the position of the i-th drone, and w(x ,y) is the task weight of the point. This weighted Voronoi division can dynamically adapt to the load difference within the region and realize the equal distribution of the task area.
To further balance the amount of spraying tasks in each sub- area, we introduce a definition of the weighted area to measure the required task load for each area, as shown in Equation 5 :
where Ai represents the total task weight area of the i-th sub- region . The higher the value, the more heavy the spraying task in the area, which needs to be assigned to drones with short paths or low energy consumption. To achieve load balancing optimization, we take the standard deviation of the weighted area as the optimization goal, defined as in Equations 6 and 7:
where A is the average weighted area of all task areas, and σA is the load imbalance index. In the swarm algorithm, we use this target as the fitness feedback of local search, guiding the partition center {pi} iterative adjustment.
B. Multi—objective Path Optimization Mechanism
In the path planning, we use the Dubins path construction method to meet the minimum turning radius limit of the UAV, and the flight path of each UAV is composed of a series of steerable Dubins path segments, and the total path length is Equation 8:

where D(pk,pk+1;pmin) represents the shortest Dubins curve length between points pk and pk+1, and pm in is the minimum turning radius of the drone. This modeling guarantees path physical enforceability and reduces energy consumption.
In order to coordinate multiple optimization objectives, we introduce the following hybrid fitness function to synthesize the path length, energy consumption, coverage and safety indicators, as shown in Equations 9 and 10:
Ei = η . Li + μ . |∆ℎi|,
In the process of swarm intelligent search, we improve the traditional ABC algorithm in two aspects: First, the reverse learning strategy is introduced to improve the search quality, and it generates a new solution as shown in Equation 11 :

where xi is the current individual, xbest is the historical optimal solution, and r is the uniform random variable. This strategy can accelerate convergence and jump out of the local optimum. When the group falls into convergence and stagnation, the Gaussian perturbation mechanism is introduced, as Equation 12 :

Figure 1 illustrates the core composition of a multi-UAV collaborative spraying system based on swarm intelligence in heterogeneous farmland. The whole system consists of four modules as follows: Adaptive Partitioning mechanism for load balancing based on actual terrain and crop density; The Role- Division Swarm Mechanism involve use of drones as detectors, boundary followers to supply drones. Path Planning module integrates Dubins curves to create valid executable spraying paths. The hybrid fitness function module takes into account coverage integrity, flight time, energy efficiency and obstacle avoidance strategy, in guiding the optimization of global paths.
IV. Experiments
A. Experimental Setup
The experimentation employs Agriculture-Vision, a real remote sensing farmland dataset, which consists of high- resolution aerial images of farmland across multiple states in the United States, featuring RGB and near-infrared (NIR) band channels, and provides semantic annotation information, and recent semi-supervised GIS-integrated U-Net models have proved highly effective for large-scale remote-sensing change detection [16] , enabling finer crop-density weighting. The data provides spatially accurate with realistic environmental characteristics, and consists of a number of irregular field borders along with changing crop densities, terrain texture patterns, and agricultural anomalous areas. We have selected four representative comparison methods:
• Dubins Ant Colony Optimization (Dubins-ACO) integrates an ant colony optimization algorithm and Dubins curve model to address the path planning problem which takes into account constraints associated with minimum turning radius.
• Particle Swarm Optimization for Capacitated Vehicle Routing Problem (PSO-CVRP) addresses the vehicle path problem with capacity limit (CVRP) with particle swarm optimization (PSO), treating each UAV as a "vehicle" and the mission area to be served as a node.
• Improved Artificial Bee Swarm Algorithm (Improved- ABC) applies a reverse learning strategy and proposed a local perturbation mechanism to the traditional artificial bee colony algorithm, to improve the global bounce and local refinement capability of the search process.
• Multi-UAV Cooperative Area Coverage System (MUC- ACS) introduced a deep Q network and environment map fusion mechanism to facilitate real-time message cooperation between UAVs, leveraging emerging cloud- edge collaborative architectures that dynamically guarantee QoS for latency-critical services [15] .
B. Experimental Analysis
Coverage Completeness (%) measures whether the spray path covers all of the effective work space in the target area. Figure 2 demonstrates the confrontation rate of SI-MUCCPP is above 95% , and does not fluctuate significantly, we classify this as a good robustness and generalization ability in very complex field coverage cases (20 irregular fields) .
MUC-ACS is about 90% on average but is not capable of maintaining a consistent coverage performance where improved-ABC and Dubins-ACO coverage is limited due to global load perception and should not expect better coverage than 86% to 90% . PSO-CVRP was mostly concerned with optimizing only the total palh length and therefore suffered from the lowest coverage rate of all approaches (80-86%) .
Total Path Length (m) measures the total distance taken by all drones to perform missions, reflecting the overall efficiency of path planning. As illustrated in Figure 3, while the number of cooperative UAVs is progressively increased from 2 UAVs to 6 UAVs, total path length for each method shows a decreasing trend. Dubins-ACO and PSO-CVRP rely only on local path smoothing or capacity constraints. Improved-ABC and MUC- ACS reduced the reduction with local search and online scheduling to about 60% . On the other hand, SI-MUCCPP greatly reduced redundancy through the cooperative approach of adaptive regional segmentation and swarm intelligence, with a total path of only 1800m in 6 scenarios.
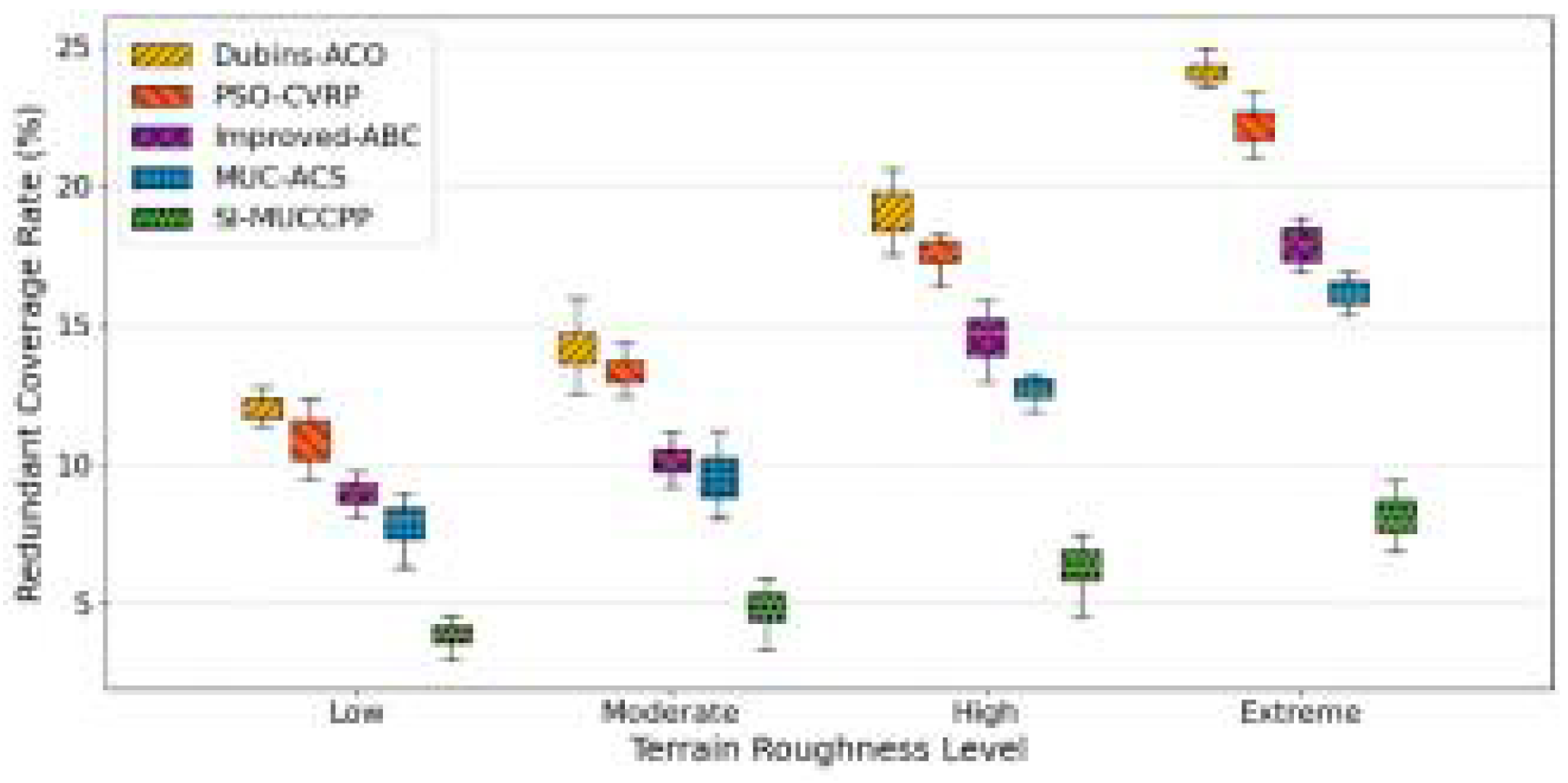
Redundant Coverage Rate (%) indicates the proportion of repeated spraying in an area, usually due to unreasonable task division or path overlap.
As we can observe in Figure 4, the more difficult overall terrain, results in higher levels of redundant spraying rates, but there are significant differences in each method. In extreme terrain, the redundancy rates of Dubins-ACO and PSO-CVRP are near 25%, while redundancy rates of Improved-ABC and MUC-ACS are capped at 18% , but still fluctuate significantly. SI-MUCCPP has the lowest redundancy rate overall, with a median rate of less than 9% in extreme terrain and very little dispersion, validating its strong advantages in reducing overlap in spray patterns and spray efficiency.
V. Conclusion
In conclusion, the SI-MUCCPP model introduced in this paper displays better coverage, less total path and lowest rate of redundant spraying. Compared to the four baseline methods through adaptive partitioning, swarm cooperation and multi- objective optimization anyway. As for future improvement, it will be used with airborne multispectral sensing and real-time pest and disease detection, to build on continuous across-field operation, and its scalability under wind farm disturbance, supply scheduling and mixed formation control will be assessed in large scale field experiments to further enhance agricultural aviation intelligence and green plant protection.
References
- Li, Y.; Xu, Y.; Xue, X.; Liu, X.; Liu, X. Optimal spraying task assignment problem in crop protection with multi-UAV systems and its order irrelevant enumeration solution. Biosystems Engineering 2022, 214, 177–192. [Google Scholar] [CrossRef]
- Ahmed, S.; Qiu, B.; Ahmad, F.; Kong, C.-W.; Xin, H. A State-of-the-Art Analysis of Obstacle Avoidance Methods from the Perspective of an Agricultural Sprayer UAV’s Operation Scenario. Agronomy 2021, 11, 1069. [Google Scholar] [CrossRef]
- Cao, J.; Wang, Y.; Li, K.; Zhu, Y.; Sun, Q. Multi-UAV adaptive cooperative coverage search method based on area dynamic sensing. J. Comput. Des. Eng. 2025, 12, 77–93. [Google Scholar] [CrossRef]
- Menon, B.K.; Deshpande, T.; Pal, A.; Kothandaraman, S. Critical regions identification and coverage using optimal drone flight path planning for precision agriculture. Results Eng. 2025, 25. [Google Scholar] [CrossRef]
- Debnath, D.; Vanegas, F.; Sandino, J.; Hawary, A.F.; Gonzalez, F. A Review of UAV Path-Planning Algorithms and Obstacle Avoidance Methods for Remote Sensing Applications. Remote. Sens. 2024, 16, 4019. [Google Scholar] [CrossRef]
- Mukhamediev, R.I.; Yakunin, K.; Aubakirov, M.; Assanov, I.; Kuchin, Y.; Symagulov, A.; Levashenko, V.; Zaitseva, E.; Sokolov, D.; Amirgaliyev, Y. Coverage Path Planning Optimization of Heterogeneous UAVs Group for Precision Agriculture. IEEE Access 2023, 11, 5789–5803. [Google Scholar] [CrossRef]
- Huang, J.; Du, B.; Zhang, Y.; Quan, Q.; Wang, B.; Mu, L. A Pesticide Spraying Mission Allocation and Path Planning With Multicopters. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 2277–2291. [Google Scholar] [CrossRef]
- Xu, Y.; Han, Y.; Sun, Z.; Gu, W.; Jin, Y.; Xue, X.; Lan, Y. Path Planning Optimization With Multiple Pesticide and Power Loading Bases Using Several Unmanned Aerial Systems on Segmented Agricultural Fields. IEEE Trans. Syst. Man, Cybern. Syst. 2022, 53, 1882–1894. [Google Scholar] [CrossRef]
- Vazquez-Carmona, E.V.; Vasquez-Gomez, J.I.; Herrera-Lozada, J.C.; Antonio-Cruz, M. Coverage path planning for spraying drones. Comput. Ind. Eng. 2022, 168, 108125–108125. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Yu, Y.; Liu, S.; She, C.; Guo, L.; Vucetic, B.; Li, Y. Multi-UAV Coverage Path Planning: A Distributed Online Cooperation Method. IEEE Trans. Veh. Technol. 2023, 72, 11727–11740. [Google Scholar] [CrossRef]
- Guo, L., Shu, X., & Zhu, Y. (2025). Smart Farming with Swarm Intelligence: Hybrid Algorithm for Optimal Multi Drone Plant Protection Paths. Pakistan Journal of Agricultural Sciences, 62(2), 215-225.
- Plessen, M. Path planning for spot spraying with UAVs combining TSP and area coverages. Smart Agric. Technol. 2025, 11. [Google Scholar] [CrossRef]
- Lin, T. (2024). The role of generative AI in proactive incident management: Transforming infrastructure operations. International Journal of Innovative Research in Science, Engineering and Technology, 13(12), Article —.
- Chen, R.; Zhang, K. The application of data mining in data analysis. International Conference on Mathematics, Modeling and Computer Science (MMCS2022). LOCATION OF CONFERENCE, ChinaDATE OF CONFERENCE; pp. 75–478.
- Fang, Z. (2025). Adaptive QoS-aware cloud–edge collaborative architecture for real-time smart water service management. Preprints, Article 2025052357. [CrossRef]
- Li, B. (2025). GIS-integrated semi-supervised U-Net for automated spatiotemporal detection and visualization of land encroachment in protected areas using remote sensing imagery. Preprints, Article 2025061534. [CrossRef]
Figure 1.
Swarm Cooperative Architecture for Multi-UAV Precision Spraying.
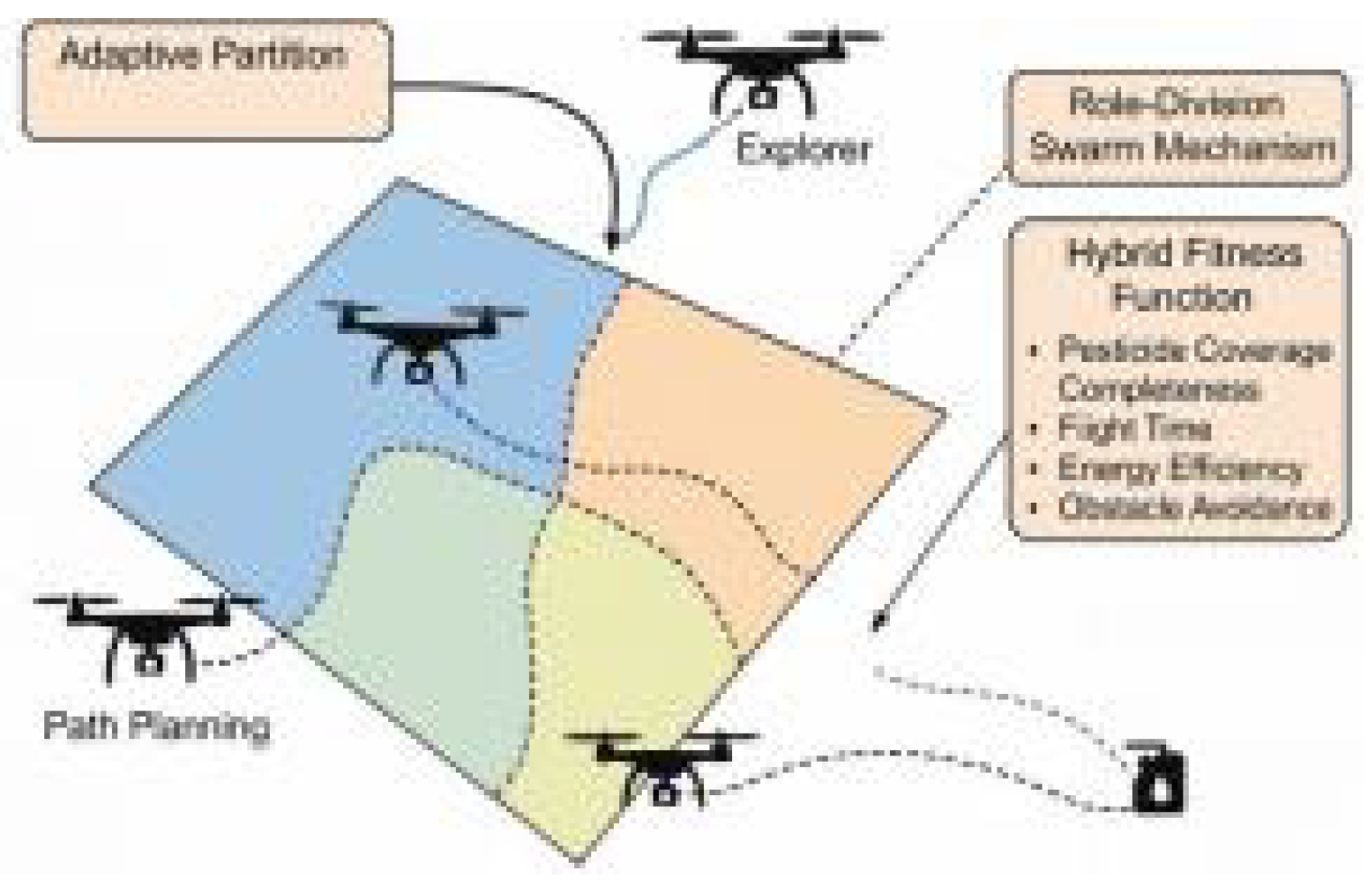
Figure 2.
Coverage Completeness Comparison in 20 Irregular Field Scenarios.
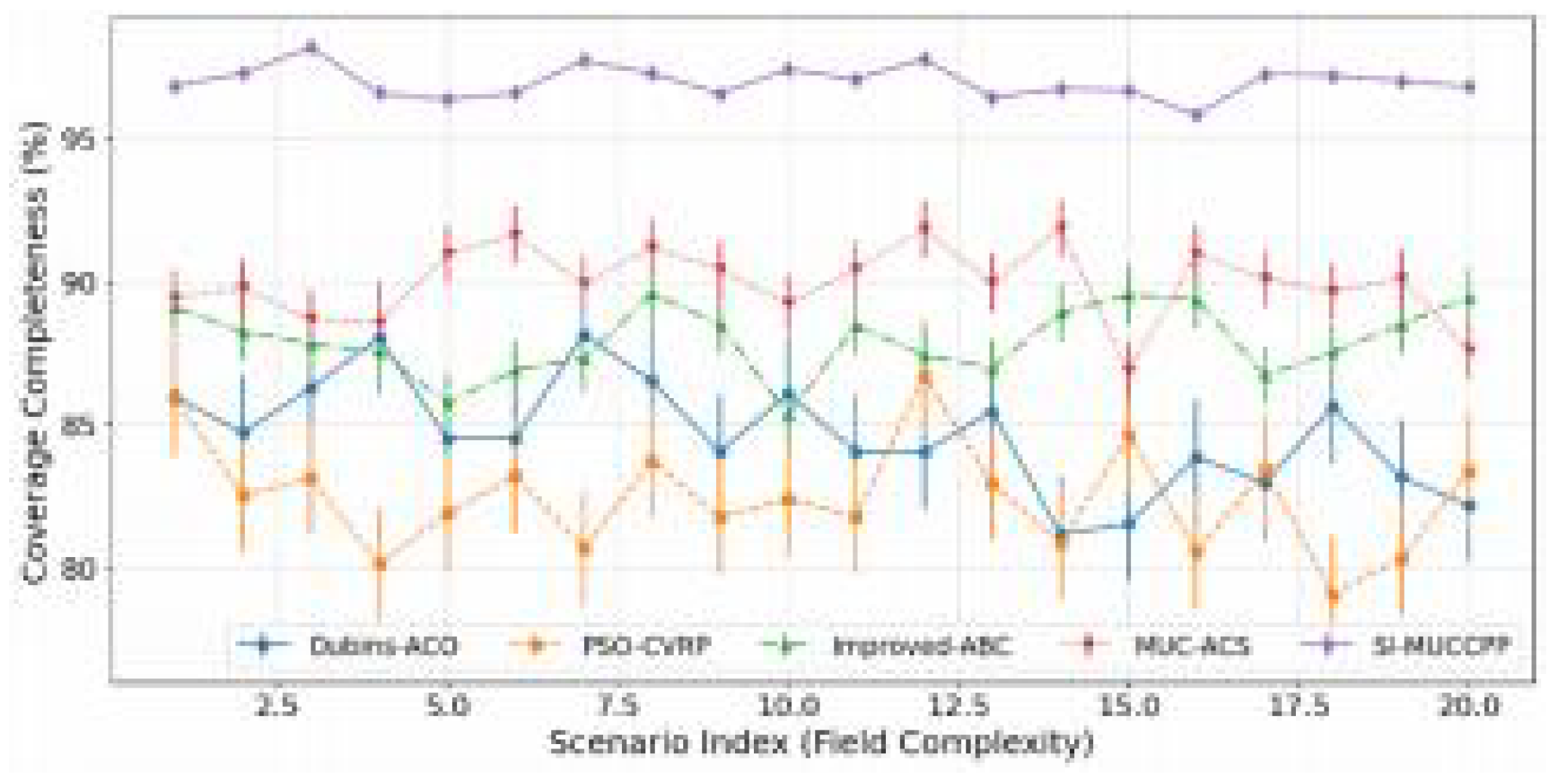
Figure 3.
Total Path Length vs. Number of Cooperating UAVs.
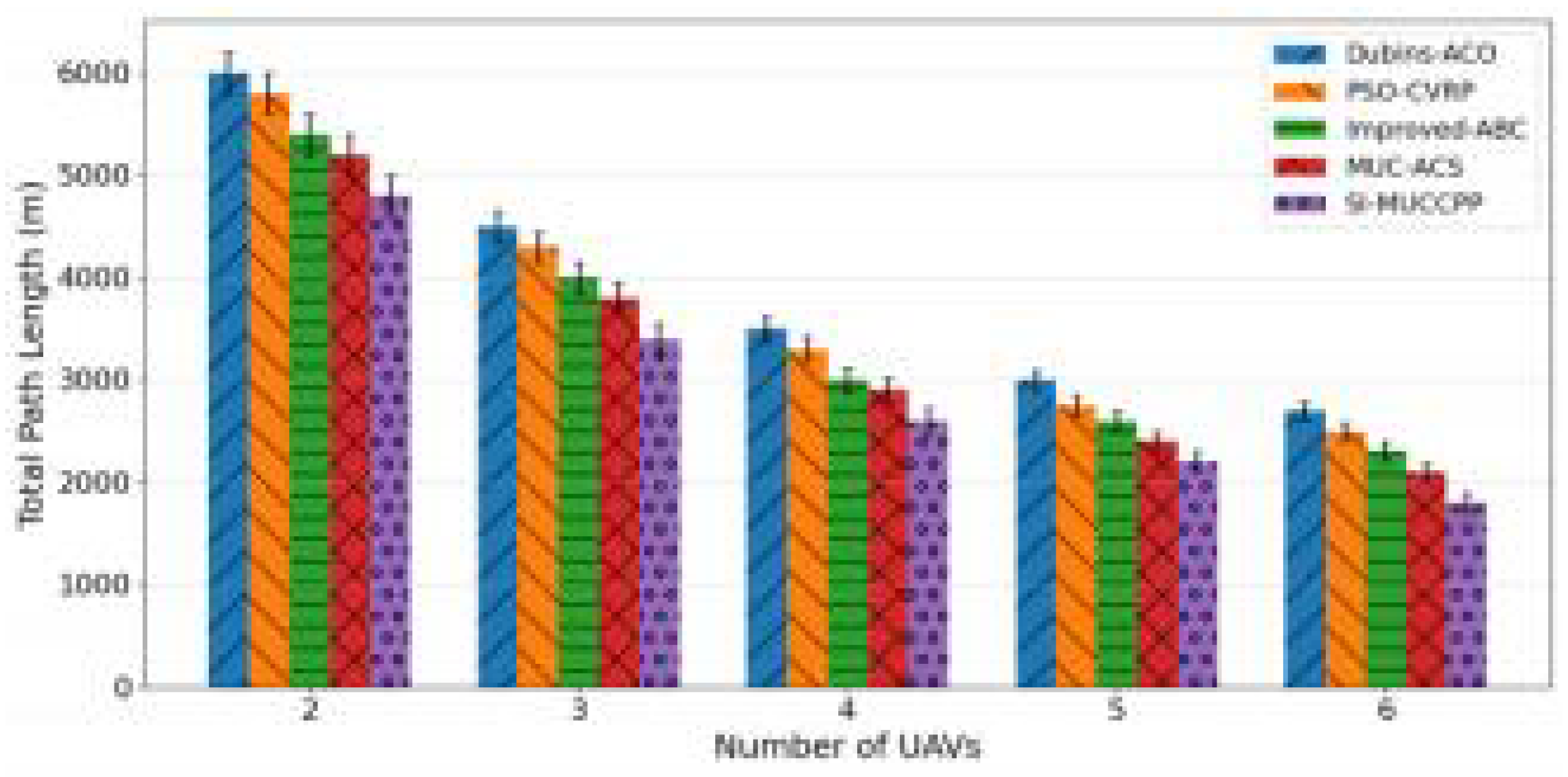
Figure 4.
Redundant Coverage Rate With Terrain Roughness Levels.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



