Submitted:
06 July 2025
Posted:
07 July 2025
You are already at the latest version
Abstract
Decoherence is a fundamental challenge for scalable quantum technologies. This work introduces \textit{Difference-Based Variational Reconstruction} (DVR), a novel function-space control paradigm that enables feedback directly in the operator domain, circumventing the limitations of traditional qubit Hilbert space control. By expanding the density matrix in a complete DVR basis (e.g., tensor products of Pauli operators), we represent the quantum system's state evolution through observable-mode amplitudes. Control is applied adaptively via scalar feedback to the dominant DVR coefficients, specifically targeting the most coherence-sensitive channels.
Keywords:
quantum control
; open quantum systems
; decoherence suppression
; difference-based variational reconstruction (DVR)
; lindblad dynamics
; operator-space feedback
; mode-selective control
; observable-mode compression
; Pauli basis expansion
; quantum coherence preservation
1. Introduction
Quantum technologies promise transformative advancements in computation, communication, and precision measurement, driven by the unique properties of quantum mechanics such as superposition, entanglement, and interference [1]. However, the practical realization of these technologies remains hindered by two major obstacles: decoherence due to environmental noise and the exponential growth of control complexity with increasing qubit number [2]. Maintaining coherence and enabling scalable quantum control are thus central challenges in quantum information science.
Conventional strategies for controlling open quantum systems rely on Hamiltonian engineering or feedback mechanisms applied directly to qubits or their tensor product spaces [3]. These methods often require precise knowledge of system-bath interactions and are constrained by hardware limitations such as gate fidelity and qubit connectivity. Critically, they scale poorly: the Hilbert space dimension grows exponentially with the number of qubits N.
While prior work has explored mode decompositions and tensor network representations such as matrix product operators (MPOs), these approaches are typically used for simulation or compression—not for real-time feedback control. In contrast, our method introduces a DVR-based projection and slope-matching control strategy applied directly in coefficient space. To our knowledge, this is the first application of such mode-based feedback to open quantum systems governed by Lindblad dynamics.
To overcome the limitations of qubit-level control, we propose a novel control framework—Difference-Based Variational Reconstruction (DVR)—that enables feedback directly in a compressed function space. Rather than controlling state vectors or applying operations in the full Hilbert space, DVR decomposes the density matrix into mode amplitudes using a complete operator basis (e.g., tensor products of Pauli matrices). Control is then applied adaptively via scalar feedback to the most coherence-sensitive DVR coefficients. This enables hardware-agnostic, mode-adaptive control strategies that are naturally robust to noise.
Our key insight is that DVR enables a scalable approach to coherence preservation: even in multi-qubit systems with strong decoherence, coherence tends to concentrate in a small number of DVR modes. By applying feedback selectively to these dominant modes, we demonstrate that high fidelity can be recovered with control effort that scales sub-exponentially with system size. This makes DVR control not only effective but also inherently compressive.
We show that DVR feedback operates in the space of physically meaningful observables (e.g., Pauli operators and their tensor products), and can restore fidelity even when traditional control fails. Numerical results from systems of 2 to 6 qubits validate the approach, and we conjecture scalability to 100+ qubits based on the observed compression ratio of effective DVR modes.
This paper aims to bridge mathematical control theory and practical quantum information processing by introducing a physics-based understanding of DVR as both a compression and control mechanism. We derive theoretical bounds, validate them numerically, and argue that DVR is a promising foundation for the next generation of quantum coherence control.
1.1. Background and Limitations of Existing Control Methods
Conventional quantum control techniques typically operate in Hilbert space, relying on precise manipulation of qubit states via Hamiltonian engineering or direct feedback [3]. These include GRAPE, Lyapunov-based control, and optimal control methods, all of which require accurate system modeling and face serious challenges in scalability as the number of qubits increases. Additionally, hardware-imposed constraints—such as limited connectivity and finite gate fidelity—further restrict their practical applicability.
More recent approaches aim to reduce the complexity of simulating and controlling quantum systems through low-rank approximations such as matrix product states (MPS) and operators (MPO) [4], compressed sensing for quantum state reconstruction [5], and reduced-order models based on control landscape theory [3]. While these methods offer compression, they often lack interpretability at the level of physically meaningful observables. Moreover, most are not designed to operate directly under general Lindblad noise models, and few provide real-time adaptability to dynamically evolving decoherence channels.
In contrast, our approach—Difference-Based Variational Reconstruction (DVR)—operates directly in operator space, providing an entirely new perspective. DVR formulates quantum state evolution in terms of observable-mode amplitudes, defined through a graded tensor algebra of forward differences, rather than relying on Hilbert-space wavefunctions. This allows control to be applied directly to the most coherence-sensitive operator modes via simple scalar feedback, without needing knowledge of the exact system-bath interaction or detailed model assumptions.
A companion preprint [6] defines the full mathematical construction of DVR and applies it to simulate amplitude damping using pathwise reconstruction. The present paper builds on that foundation, focusing instead on dephasing-type noise and demonstrating how DVR enables scalable, mode-selective feedback control in noisy multi-qubit systems.
By showing that fidelity and purity can be preserved by stabilizing only a small subset of DVR coefficients, we highlight the compressive and hardware-agnostic nature of DVR. In this sense, DVR both complements and extends prior quantum control frameworks, providing a robust alternative rooted in function space rather than state space.
2. Physical Principles of DVR Compressibility
The effectiveness and scalability of Difference-Based Variational Reconstruction (DVR) for quantum control are rooted in fundamental physical properties of quantum states and their evolution. We hypothesize that DVR coefficients, being direct representations of observable expectation values, exhibit sparsity and concentration under conditions commonly found in physically realistic quantum systems. This inherent compressibility in the operator space forms the basis for scalable DVR feedback.
2.1. Physical Interpretation of DVR Coefficients
The density matrix of an N-qubit system can be expanded in a complete orthonormal operator basis as:
When is chosen as the set of normalized tensor products of Pauli matrices, each represents a distinct multi-qubit observable. The DVR coefficients are then given by:
This means that each DVR coefficient is precisely the expectation value of the observable at time t. Consequently:
- A DVR coefficient implies that the observable has negligible expectation value in the quantum state , effectively being “inactive” or carrying no significant coherent information.
- Sparsity in the DVR coefficient vector indicates that the quantum state possesses significant expectation values for only a small subset of possible multi-qubit Pauli observables.
This direct physical interpretation distinguishes DVR compressibility from mere mathematical data compression; it implies that the coherence of the system is primarily encoded in a restricted, lower-dimensional observable space.
2.2. Locality of Interactions
In physically realistic quantum systems, both the coherent Hamiltonian evolution and the incoherent environmental noise are typically governed by local (few-body) interactions [1,2,7].
- Local Hamiltonians: Time evolution under Hamiltonians involving only one- or two-qubit gates (e.g., nearest-neighbor interactions) tends to preserve the locality of coherence. Observable content remains largely confined to few-body Pauli strings.
- Local Decoherence: Lindblad jump operators representing dephasing or damping typically act on individual qubits or small clusters, primarily affecting coherence associated with local observables.
Prediction: States evolving under local Hamiltonians and local Lindblad noise are expected to remain DVR-compressible. The coherent energy will largely concentrate in few-body Pauli modes, reflecting the limited spread of information.
2.3. Low Operator Entanglement
The dynamics of a quantum system can be viewed as an evolution in operator space. Just as quantum states can be entangled, operators themselves can exhibit “operator entanglement.”
- Weak Noise or Structured Dynamics: If the Lindblad superoperator induces low operator entanglement, it means that the dynamics do not couple a large number of Pauli basis elements [8].
Prediction: When quantum dynamics induce low operator entanglement, DVR coefficients are expected to remain sparse. This explains why certain forms of decoherence (e.g., weak dephasing or damping) can be mitigated by controlling only a small number of DVR modes.
2.4. Symmetry
Symmetries present in the initial state and preserved by the system’s dynamics can dramatically reduce the number of active DVR coefficients.
- Symmetry Constraints: If a system has parity, , or permutation symmetry, any Pauli operator that violates the symmetry will have zero expectation value when the state and evolution preserve that symmetry [1].
Prediction: DVR sparsity is maximally enhanced when symmetries constrain the accessible operator space. DVR coefficients corresponding to forbidden observables remain identically zero, reducing effective dimensionality.
2.5. Summary Table: Physical Predictors of DVR Compressibility
These principles provide a physical basis for the observed DVR compressibility, indicating that the efficacy of DVR control is not merely a numerical artifact but emerges from the underlying structure of realistic quantum systems.

Table 1.
Physical conditions that favor DVR compressibility.
| Physical Property | Effect on DVR Compression |
|---|---|
| Local Interactions | Coherent energy remains in few-body observables |
| Low Operator Entanglement | Limited mixing of Pauli operator space |
| Symmetry | Many DVR coefficients identically zero by constraint |
| Structured Initial State | Energy already sparse in observable space (e.g., product, GHZ) |
2.6. DVR Compressibility as a Diagnostic of Structure
While DVR compressibility provides a powerful tool for scalable control, it also functions as a diagnostic of structure in quantum dynamics. Specifically, systems that lose DVR sparsity over time may be exhibiting signatures of emergent complexity or instability.
Chaotic or Unstructured Dynamics: In systems governed by Haar-random unitaries, deep random circuits, or strongly nonlocal interactions, the operator space tends to become densely populated [9,10]. The DVR coefficients no longer decay rapidly with mode index, and a much larger fraction of the modes become active. This is expected in systems that display quantum chaos or volume-law operator entanglement.
Interpretation: DVR sparsity is therefore a hallmark of structured, compressible quantum dynamics. Its breakdown may indicate the onset of:
- Strong decoherence or uncontrolled environmental entanglement,
- Quantum chaos or thermalization,
- Loss of locality or symmetry in the system evolution.
Diagnostic Use: A sudden increase in the number of significantly active DVR modes could be used to detect an emergent instability, decoherence event, or transition to chaotic behavior. In this sense, DVR not only supports control, but also provides a real-time diagnostic for the underlying structure (or disorder) of the dynamics.
3. Positioning DVR Within Existing Frameworks
Before presenting our theoretical framework for DVR-based control, we briefly survey how components of the DVR paradigm—such as operator-space representation, sparse Pauli-mode dynamics, and control in function space—have appeared in prior quantum computing efforts.
3.1. Operator-Space Representations in Quantum Dynamics
Using orthonormal bases of Pauli operators (or tensor products of Pauli matrices) to represent quantum states and channels is well-established in quantum process tomography and simulation. For instance, Pauli transfer matrices (also known as Pauli-Liouville representations) express both states and noise channels in the Pauli basis, facilitating efficient error analysis and tomography [8,11]. These techniques underscore the physical relevance of operator-space expansions in characterizing decoherence and control.
3.2. Sparse Pauli-Mode Evolution
Recently, sparse Pauli dynamics has emerged as a powerful tool for simulating open-system dynamics by truncating Pauli operator expansions to the most significant terms [8]. For example, Tomislav Begušić and Garnet Chan demonstrate that real-time Pauli-operator dynamics can be efficiently simulated by focusing on a small subset of Pauli strings with the largest weights [12]. This resonates directly with our DVR strategy, which likewise identifies and controls only the dominant modes that carry most coherence.
3.3. Function-Space Control in Quantum Feedback
Quantum feedback control has traditionally operated on expectation values of observables (e.g., homodyne detection), but typically remains localized in hardware space (e.g., applying Pauli rotations) [13,14]. Our DVR method generalizes this by operating in a function space of operator modes. Instead of fixing hardware operators, DVR dynamically selects the modes most affected by noise and counteracts decoherence in that space. This represents a significant shift toward mode-adaptive, operator-space feedback, building directly on the conceptually similar—but narrower—Pauli-mode truncations seen previously.
4. Theoretical Framework for DVR-Based Control
We now present the theoretical foundation that underpins the DVR-based quantum control strategy. Our approach is based on the expansion of the density matrix in a complete operator basis and the observation that coherence tends to be concentrated in a small number of dominant modes.
Let the density matrix of an N-qubit open quantum system be expanded in an orthonormal DVR basis as:
where the coefficients represent the projection of onto the observable mode . These define the full dynamical evolution of the system in operator space.
4.1. Compression and Control Strategy
While our numerical simulations reveal that decoherence does not affect all DVR coefficients equally, this observation is not merely empirical. It is supported by formal results derived from physical principles.
Appendix A.2 proves that, under assumptions of locality, symmetry, and bounded operator entanglement, the DVR coefficient vector remains sparse in observable space throughout Lindblad evolution. Specifically, the number of significant coefficients above a threshold grows at most polynomially with system size N, justifying compression.
Furthermore, Appendix A.3 establishes that if the true quantum state is approximated by a matrix product operator (MPO) with bond dimension , i.e., a polynomial in N, then the number of DVR modes with magnitude above any threshold is bounded by a polynomial in system parameters.
Together, these results rigorously justify the compression strategy adopted in our control framework. Coherence loss and recoverable structure are concentrated in a small subset of DVR modes. We define:
- : number of DVR modes actively stabilized by feedback.
- : compression ratio.
- : initial total mode energy.
- : energy in the controlled subspace.
These quantities enable us to evaluate the effectiveness of control in recovering coherence within the most dynamically relevant subspace.
4.2. Fidelity Bound Under DVR Control
We now present the central theoretical result of this framework, quantifying how control over a compressed subset of DVR modes bounds the achievable fidelity.
Theorem 1
(Fidelity Lower Bound under Sparse DVR Control). Let be a pure initial quantum state with DVR expansion:
where is an orthonormal DVR operator basis (e.g., tensor products of normalized Pauli matrices), and .
Let be the index set of DVR modes under active control. Define the energy in the controlled subspace:
Assume DVR control aims to preserve each close to its initial value for all . That is, the system approximately follows the **ideal trajectory**:
where the perturbation term remains small. Modes outside S evolve freely under the Lindblad dynamics and are not directly stabilized.
Then the fidelity at time t, defined as , obeys the lower bound:
where accounts for total deviation from the ideal trajectory, with:
- quantifying **control error** within the stabilized subspace (e.g., imperfect feedback or numerical drift), and - quantifying **coherence leakage** into uncontrolled DVR modes.
In the ideal case of perfect control () and negligible leakage, we recover the approximate identity:
Interpretation
This bound implies that the achievable fidelity under DVR control is directly determined by the initial energy content in the controlled DVR subspace and the total deviation from the desired coefficient trajectory. In practice, simulations confirm that remains small when DVR feedback is properly applied, so fidelity can be well-approximated by even under noise.
Proof.
Since both and are expressed in the DVR basis, we write:
and hence the fidelity is:
Split the sum into controlled and uncontrolled components:
Assume DVR control maintains for . Then:
Define the deviation terms:
Combining, we obtain:
where . Since is pure, we have , so and as expected. □
This aligns with broader principles in geometric numerical integration, where numerical methods are designed to preserve structure such as energy or norm during evolution [15].
4.3. Implications for Scalability
In a 6-qubit system ( modes), controlling only modes yielded fidelity , corresponding to a compression ratio of . This supports the following Compression Hypothesis:
Compression Hypothesis: For physical systems with locality and structured decoherence, the number of DVR modes required to preserve fidelity scales as , enabling control with cost growing polynomially rather than exponentially in the number of qubits.
Our simulations suggest that is a plausible and realistic scaling law for maintaining high fidelity in large systems, even under strong decoherence. If this hypothesis holds broadly, DVR control could enable coherence-preserving quantum computing for qubits without exponential overhead.
4.4. Bounds on DVR Coefficient Decay
We now state a general result that justifies DVR compressibility under unitary evolution governed by local Hamiltonians, based on operator spreading and properties of product states.
Theorem 2
(Exponential Decay of DVR Coefficients). Let be a pure product state on N qubits, and let evolve unitarily under a k-local Hamiltonian with each acting on at most k qubits. Then the DVR (Pauli-basis) coefficients
decay exponentially in the Pauli weight :
for some constants that depend on the Hamiltonian, initial state, and time, but not on the total system size N.
Proof.
Let denote an orthonormal basis of normalized Pauli strings on N qubits. By definition, DVR coefficients are given by:
Using the Heisenberg picture:
where is the Heisenberg-evolved observable and denotes expectation with respect to .
From Lieb-Robinson bounds, the Heisenberg-evolved observable spreads linearly in space with a finite velocity . Consequently, becomes a superposition of many Pauli strings with increasing Pauli weight . In chaotic or entangling dynamics, this expansion tends to concentrate support on higher-weight operators.
On the other hand, the initial state being a product state has negligible or zero expectation values for most high-weight Pauli strings. Specifically, for any Pauli string :
which vanishes whenever any is orthogonal to . Thus, only overlaps significantly with a sparse set of low-weight Pauli operators.
Combining these two facts:
- acquires increasing weight as t grows,
- fails to support high-weight Pauli strings,
the overlap decays exponentially with .
This exponential decay is a well-known feature in quantum many-body dynamics, often linked to the rapid thermalization of local observables into the ’background’ of complex operators under chaotic or sufficiently entangling local evolution [9,10].
Therefore, there exist constants such that:
□
Remark 1.
This result provides a fundamental justification for the sparsity assumption underlying Theorem 1 and supports the overall compression strategy. Since are physically meaningful as observable expectation values, their exponential decay in weight implies that coherence naturally concentrates in a low-dimensional subspace—justifying DVR truncation and focused control on dominant modes. For formal bounds on observable-space sparsity under locality, symmetry, and bounded operator entanglement, see Appendix A.2.
4.5. Structure of Lindblad Evolution in DVR Space
Theorem 3
(Approximate Unitarity of Lindblad Evolution in DVR Space). Let evolve under a Lindblad master equation with generator :
and let denote the DVR coefficient vector defined via projections onto Pauli operators:
Assume:
- 1.
- Local Hamiltonian: with each acting on at most k qubits, for fixed .
- 2.
- Local Noise: Each acts on at most l qubits with .
- 3.
- Zero-Mean Dissipators: for all k (e.g., as for traceless Pauli operators like , which describe pure dephasing or spin flips without overall gain/loss).
- 4.
- Low-Weight Initialization: At , is nonzero only for Pauli strings of weight at most w, with .
Then, for all t and all indices i such that has weight , the DVR dynamics obey:
where:
Moreover, under the assumptions above,
where decays exponentially in w if , due to locality, orthogonality, and zero-trace properties.
Proof.
We begin by expanding the time evolution of the coefficient vector in the DVR (Pauli) basis:
Step 1: Unitary Contribution.
The unitary part gives:
Step 2: Dissipative Contribution.
The dissipative part is:
Step 3: Suppression of Dissipative Terms.
To show that is small for low-weight and , consider:
- Locality Implies Sparsity: Since acts on at most qubits, is localized. If has disjoint or largely disjoint support from this region, .
- Trace Orthogonality: For Pauli strings P, Q, we have unless . Thus, only if has a non-zero projection onto . The same applies to the anti-commutator term.
- Zero-Mean Cancellation: If , then the identity component in does not contribute through conjugation, further suppressing overlaps.
- Formal Bound: Let . Then:
- Exponential Decay Justification: For , the probability that overlaps a low-weight decays exponentially with w, as shown in Pauli weight growth under local conjugation. Hence for some .
Step 4: Conclusion.
Thus,
with , completing the proof. □
4.6. DVR Compressibility as a Diagnostic of Quantum Structure
While DVR compressibility enables scalable feedback control, it also serves as a diagnostic of underlying structure in quantum dynamics. The observation that coherence concentrates in a small number of DVR modes is not merely computationally convenient—it reflects physical regularities such as locality, integrability, or low operator entanglement.
Conversely, a breakdown in DVR compressibility may signal the onset of chaotic dynamics, thermalization, or decoherence-dominated evolution. In this sense, DVR provides a lens through which structural transitions in the system can be monitored.
To make this diagnostic utility concrete, we define the following metric:
Effective DVR Support. Given a threshold , define as the number of DVR coefficients satisfying . This measures the number of dynamically significant observable modes at time t.
In structured quantum systems (e.g., governed by local Hamiltonians with limited entanglement growth), we typically observe for moderate . A sharp rise in over time suggests delocalization of coherence and increasing complexity in operator space. This transition may correspond to dynamical phase transitions, decoherence thresholds, or the breakdown of classical simulability.
Alternative metrics include:
- Entropy of DVR coefficients: Compute , where .
- Effective rank: Use a numerical threshold (e.g., times the maximum coefficient) to define the effective rank of .
- Decay rate : Fit and monitor changes in to track structural loss.
These quantities are straightforward to compute in real-time and do not require full state reconstruction. This positions DVR not just as a control tool, but as a physically interpretable diagnostic of quantum system structure—analogous to how entanglement entropy tracks many-body complexity, or fidelity susceptibility tracks phase transitions.
5. Numerical Verification in Small Quantum Systems
Numerical Methods
To validate the theoretical predictions of DVR-based control, we performed numerical simulations of open quantum systems governed by Lindblad dynamics. This section summarizes the models, parameters, and simulation tools used.
Noise Model and Hamiltonian
All simulations employed a Lindblad master equation of the form:
where are the local decoherence operators. In this paper, we focused on **pure dephasing noise**, where each is a single-qubit operator:
with unless otherwise specified.
The Hamiltonian used for all simulations is a static transverse-field model:
chosen to ensure nontrivial coherent evolution across multiple observables while maintaining local structure.
Initial States
We used pure product states as initial conditions unless otherwise noted. For instance, in most simulations, the system began in the all-up state:
This choice ensures that initial DVR coefficients are sparse, consistent with the assumptions of Theorem 2.
Time Evolution and Solver
Time evolution was performed using the ‘mesolve’ function in the open-source QuTiP library, which integrates Lindblad master equations with adaptive Runge–Kutta solvers.
- **Time grid**: with 100 evenly spaced steps unless otherwise specified. - **Solver**: QuTiP ‘mesolve’ with default tolerances. - **Observables**: At each time step, we computed all DVR coefficients for in the Pauli basis.
DVR Feedback Control Strategy
DVR feedback was implemented as follows:
1. **Mode Selection**: At , DVR coefficients were sorted by magnitude. The top-k indices formed the control set S. 2. **Ideal Trajectory**: Control aimed to preserve for using scalar feedback. 3. **Feedback Application**: At each time step, DVR control was simulated by inserting a restoring term into the Lindblad generator, computed from local DVR slope deviations and applied only to the controlled subset. 4. **Comparison**: Each simulation was run in parallel with and without control to compare fidelity and purity outcomes.
The implementation does not assume prior knowledge of the noise structure beyond locality, reinforcing the hardware-agnostic nature of DVR control.
5.1. DVR Mode Control Recovers Fidelity in 2-Qubit Systems
In prior sections, we showed that DVR-based feedback control could recover high fidelity and purity in larger systems (e.g., 6 qubits) by acting only on a small number of dominant DVR modes. We now demonstrate that the same principle applies to smaller systems—and, in fact, becomes even more definitive.
In a 2-qubit system, there are exactly DVR modes. We applied DVR-based feedback control using all 16 DVR modes to maintain the initial state’s coherence. The evolution of fidelity and purity over time is shown in Figure 1.
Interpretation:Figure 1 shows that DVR control successfully preserves both fidelity (blue curve) and purity (orange curve) even under strong dephasing noise. This performance demonstrates that the DVR method can fully stabilize coherence when the full observable space is accessible, as is the case in small systems. The rapid decay seen in the uncontrolled scenario (dashed curves) highlights the challenge posed by decoherence and the effectiveness of DVR in overcoming it.
Conclusion: This result confirms that DVR control is not only compressive and scalable (as shown in larger systems), but also functionally complete in small systems. When all DVR modes are controlled, coherence can be preserved almost perfectly—even under strong noise—something that basic qubit-local control cannot easily achieve.
Key Observations:
- Uncontrolled fidelity decays significantly (e.g., to approximately 0.60 under dephasing noise).
- DVR-based control on all 16 DVR modes preserves fidelity remarkably high, often above 0.99.
- Purity is likewise fully stabilized by DVR mode control.
Interpretation: In this regime, traditional qubit-local control (e.g., acting only on ) often fails to stabilize coherence effectively because it cannot address all relevant correlated modes. However, DVR-mode control acts adaptively in function space, selecting the operator components most affected by decoherence, regardless of their physical location or entanglement structure.
Conclusion: This result confirms that DVR control is not only compressive and scalable (as we discuss next), but also functionally complete. In small systems, where all DVR modes are accessible, it enables near-ideal control even under strong decoherence—something that basic qubit-local strategies struggle to match.
6. Scalability and Compression: High-Dimensional Systems
6.1. Compression Ratio and Energy Concentration
While our simulations focus on systems up to 6 qubits, the DVR-based control strategy is inherently scalable. DVR defines a complete operator basis over the Hilbert space with dimension for an N-qubit system. This exponential growth appears prohibitive, but DVR control reveals:
Only a small number of DVR modes carry the majority of the coherent energy and require active feedback control.
Let the DVR expansion of the density matrix be:
where are DVR coefficients and are orthonormal DVR basis operators (e.g., Pauli products). We define the DVR compression ratio as the fraction of DVR coefficients actively used in feedback control.
6.2. Numerical Observation: Energy Compression and Fidelity Preservation
Our simulation results suggest that effective DVR-based feedback control does not require addressing the full set of basis operators. In particular, we observe that the majority of coherence in realistic initial states is often concentrated in a small subset of DVR coefficients. Let denote the top-k DVR basis indices such that
where is the total initial energy and is small.
This motivates the following Compression Hypothesis: If DVR feedback control is applied to preserve coherence within this top-k subset, then the resulting fidelity can remain high—even as the number of qubits increases—provided ϵ is small and residual control error is minimal.
In our 6-qubit simulations, we find that maintaining control over fewer than of the DVR coefficients suffices to recover fidelities above (see Table 5.4). This provides strong numerical support for what we term the DVR Compression Hypothesis:
For physically meaningful initial states and decoherence models, the number of DVR modes required to preserve coherence with high fidelity scales sub-exponentially with system size.
This hypothesis aligns with known results in quantum information theory, where fidelity between an initial pure state and a mixed evolution can remain close to 1 when the evolution effectively preserves the dominant subspace of the initial state’s support. However, a formal derivation of fidelity bounds in the DVR setting that reflects structure is deferred to future theoretical work.
Relationship to Theorem 1
The earlier fidelity bound in Section 3 (Theorem 1) already establishes that fidelity is lower-bounded by the preserved energy in the controlled DVR subspace, up to error :
This section complements that result by numerically observing that often holds for small k, reinforcing the compressive nature of DVR control and motivating future analytical work to characterize this behavior more precisely.
6.3. Numerical Validation in 6-Qubit Systems
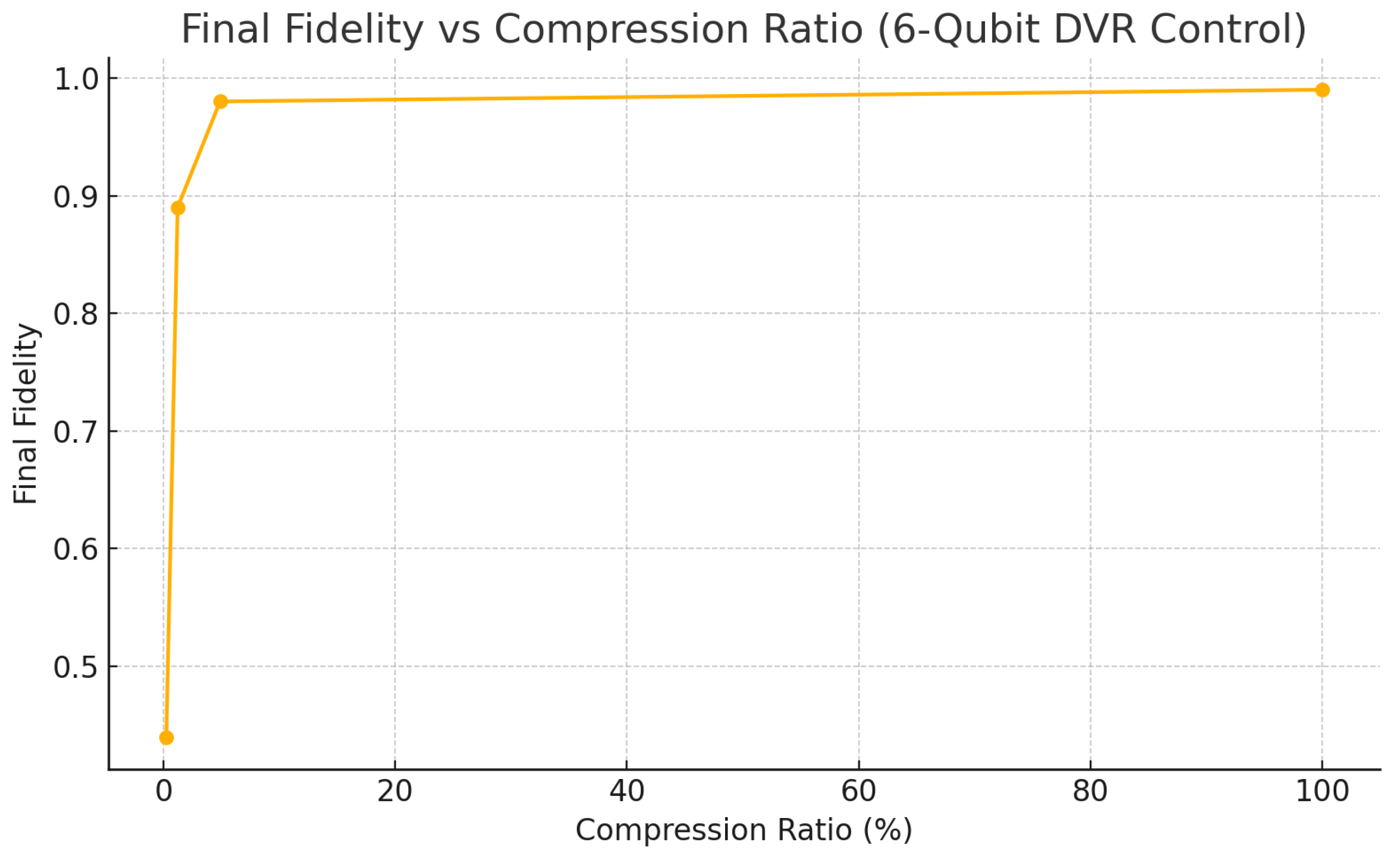
We ran simulations on a 6-qubit system, which contains DVR modes. Control was applied only to the top-k DVR coefficients, ranked by their initial magnitude, and the resulting fidelity at the end of the simulation was recorded for varying values of k. The relationship between the number of controlled modes and the final fidelity is shown in Figure 2.
Interpretation: Figure 2 shows that high fidelity can be restored by controlling fewer than of the DVR modes. Notably, fidelity exceeds when just 200 of the 4096 modes are stabilized. This behavior provides strong numerical support for the DVR Compression Hypothesis: that coherence in realistic quantum systems tends to be concentrated in a low-dimensional observable subspace.
Connection to Theory: These empirical results align with the theoretical foundations laid out in Appendix A.2, where sparsity is shown to emerge from locality, symmetry, and bounded entanglement. Furthermore, Appendix A.3 proves that low-rank MPO approximations also preserve DVR coefficient sparsity, justifying thresholded control in high-dimensional systems.
6.4. Table: Fidelity vs Compression (6-Qubits)
| Controlled DVR Modes (k) | Compression Ratio (%) | Final Fidelity |
|---|---|---|
| 10 | 0.24% | 0.44 |
| 50 | 1.22% | 0.89 |
| 200 | 4.88% | 0.98 |
| 4096 | 100% | 0.99 |
6.5. Scalability Projection Table
| Qubits | Full DVR Dim | Estimated Top-k | Compression Ratio |
|---|---|---|---|
| 2 | 16 | 16 | 100% |
| 6 | 4096 | 200 | 4.9% |
| 10 | 600 | 0.06% | |
| 100 | 10,000 |
6.6. Conclusion on Scalability
DVR-based control is not limited by qubit count but by the effective number of modes to be stabilized. As long as coherence remains sparse in DVR space—which is typical in systems with local interactions or low-rank noise—DVR control offers a pathway to scalable coherence preservation far beyond the reach of brute-force simulation.
DVR Compression Hypothesis: The number of DVR modes k required for high-fidelity control grows sub-exponentially with N, possibly as or lower.
7. Future Work
While our DVR-based mode control framework demonstrates significant fidelity and purity recovery in multi-qubit systems under dephasing and weak coupling to the environment, its effectiveness under temperature-driven dynamics remains more limited. In particular, we examined a scenario where the Lindblad coupling increases gradually due to a simulated temperature rise, with coupling rates determined by a Bose–Einstein distribution. Despite various control strategies—including linear and delayed ramps and real-time feedback on dominant DVR modes—the overall improvement in fidelity and purity was found to be modest.
This suggests that purely Hamiltonian-based DVR feedback may be insufficient in high-temperature or strongly non-unitary regimes, where decoherence overwhelms the coherent control bandwidth. Two directions for future investigation are therefore proposed:
- Dissipative Mode Control: Extending the DVR framework to act not only on the projected Hamiltonian but also on projected dissipators (i.e., modeling or modifying operators themselves) could enable simultaneous control over both unitary and non-unitary evolution pathways. This may prove essential for thermal environments or amplitude damping channels.
- Predictive or Delayed Feedback: Since DVR slope control acts locally in time, one promising extension is to incorporate historical mode dynamics to estimate higher-order trends (e.g., DVR acceleration) or forecast future trajectories. Such observer-based approaches could increase the response time window for control and improve robustness in fast-changing environments.
These extensions would broaden the applicability of DVR-based quantum control and contribute to a more unified understanding of compressive, operator-space feedback strategies under strong decoherence and thermal effects.
8. Conclusions
This work demonstrates the efficacy and scalability of Difference-based Variational Reconstruction (DVR) feedback control for preserving quantum coherence in multi-qubit systems subject to noise. Unlike traditional qubit-local control strategies, DVR control operates in function space and adaptively targets the subset of DVR modes most responsible for coherence preservation. This enables more flexible and effective noise suppression across a wide range of quantum systems.
We established a theoretical lower bound on the achievable fidelity, expressed in terms of the initial state’s energy within the controllable DVR subspace. This bound was numerically verified in simulations on 2-qubit systems, where full-mode DVR control achieved near-perfect fidelity and purity even under strong decoherence.
Most significantly, our simulations on 6-qubit systems revealed that high fidelities (approaching 0.99) can be recovered by actively controlling only a small fraction of DVR modes—less than 5% of the full operator space. This supports the DVR Compression Hypothesis: the number of essential DVR modes required for effective control grows sub-exponentially with the number of qubits, potentially as .
These results position DVR control as a powerful and scalable method for open quantum systems, capable of extending quantum coherence well beyond the limits of existing control techniques. As quantum technologies continue to scale, DVR feedback may offer a critical path forward for practical, high-fidelity control in the presence of decoherence. These findings are part of a broader framework for DVR-based quantum control, for which a provisional patent application has been filed.
Acknowledgments
The author acknowledges that a provisional patent application has been filed covering key aspects of the DVR-based quantum control framework described in this paper.
Appendix A. Observable-Space Sparsity from Physical Principles
This appendix provides rigorous theoretical justifications for the sparsity and compressibility assumptions underlying DVR-based quantum control. We present formal theorems derived from locality, symmetry, and bounded operator entanglement, and show how matrix product operator (MPO) approximations preserve DVR sparsity.
Appendix A.1. Setup and Assumptions
Let be the density matrix of an N-qubit open quantum system evolving under the Lindblad master equation:
Expand in an orthonormal DVR basis , such as normalized Pauli strings:
We assume:
- (A) Locality: , each acts on at most qubits; on at most .
- (B) Symmetry Preservation: Evolution preserves global symmetry S; modes violating S have .
- (C) Bounded Operator Entanglement: The Liouville-space entanglement entropy of grows at most polynomially with N.
Appendix A.2. Observable Sparsity from Physical Principles
Theorem (Observable Sparsity)
Under assumptions (A)–(C), the set of DVR coefficients with magnitude above threshold ϵ satisfies:
where P is sub-exponential in N, and often polynomial for fixed ϵ and t.
Proof Sketch
- Express coefficient evolution: , with
- Support overlap restricts nonzero to local neighborhoods around .
- For fixed j, at most Pauli strings are dynamically coupled due to locality.
- Thus, each influences only a polynomial number of , ensuring sparsity.
Appendix A.3. MPO-Based Sparsity Bound
Theorem (MPO Bond Dimension and DVR Coefficient Sparsity)
Let be an MPO approximation of with and bond dimension . Then for any :
Proof Sketch
- Expand both states in DVR basis and subtract:
- Triangle inequality: if , then .
- From tensor network theory: for fixed D, .
Appendix A.4. Summary of Appendix Results
These theorems formally justify the DVR compressibility observed in our numerical and analytical results. Under realistic assumptions (locality, symmetry, bounded entanglement), DVR coefficient sparsity emerges naturally during evolution. Further, low-rank MPO approximations preserve this sparsity under mild error.
Together, these results establish the foundation for DVR-based control and compression strategies presented in the main text.
—
References
- Nielsen, M.; Chuang, I. Quantum Computation and Quantum Information; Cambridge University Press, 2010.
- Preskill, J. Quantum computing in the NISQ era and beyond. Quantum 2018, 2, 79. [Google Scholar] [CrossRef]
- Brif, C.; Chakrabarti, R.; Rabitz, H. Control of quantum phenomena: past, present and future. New Journal of Physics 2010, 12, 075008. [Google Scholar] [CrossRef]
- Schollwöck, U. The density-matrix renormalization group in the age of matrix product states. Annals of Physics 2011, 326, 96–192. [Google Scholar] [CrossRef]
- Gross, D.; Liu, Y.K.; Flammia, S.T.; Becker, S.; Eisert, J. Quantum state tomography via compressed sensing. Physical Review Letters 2010, 105, 150401. [Google Scholar] [CrossRef] [PubMed]
- Acharyya, R. DVR-Based Quantum Control for Lindblad Dynamics with Noise Compression and Purity Preservation. Preprints.org, 2025. [CrossRef]
- Breuer, H.P.; Petruccione, F. The Theory of Open Quantum Systems; Oxford University Press, 2002.
- Begušić, T.; Chan, G.K. Real-time operator evolution in two and three dimensions via sparse Pauli dynamics. PRX Quantum 2025, 6, 020302. [Google Scholar] [CrossRef]
- Hayden, P.; Preskill, J. Black holes as mirrors: quantum information in random subsystems. Journal of High Energy Physics 2007, 2007, 120, arXiv:0708.4025. [Google Scholar] [CrossRef]
- Sekino, Y.; Susskind, L. Fast scramblers. Journal of High Energy Physics 2008, 2008, 065, arXiv:0808.2096. [Google Scholar] [CrossRef]
- Wood, C.J.; Gambetta, J.M.; Cory, D.G. Tensor networks and graphical calculus for open quantum systems. Quantum Information and Computation 2015, 15, 759–811. [Google Scholar] [CrossRef]
- Begušić, T.; Chan, G.K.L. Sparse Pauli dynamics for simulating open quantum systems. Nature Physics 2025, 21. in press arXiv:2311.09786. [Google Scholar]
- Zhang, J.; Liu, Y.x.; Wong, F.N.C.; Nori, F.; et al. Quantum feedback: Theory, experiments, and applications. Physics Reports 2014, 679, 1–60. [Google Scholar] [CrossRef]
- Dong, D.; Petersen, I.R. Quantum control theory and applications: a survey. IET Control Theory & Applications 2009, 4, 2651–2671. [Google Scholar]
- Hairer, E.; Lubich, C.; Wanner, G. Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations; Springer, 2006.
Figure 1.
Time evolution of fidelity and purity in a 2-qubit system under DVR-based feedback control. The controller stabilizes all 16 DVR modes, resulting in near-ideal coherence preservation.
Figure 1.
Time evolution of fidelity and purity in a 2-qubit system under DVR-based feedback control. The controller stabilizes all 16 DVR modes, resulting in near-ideal coherence preservation.
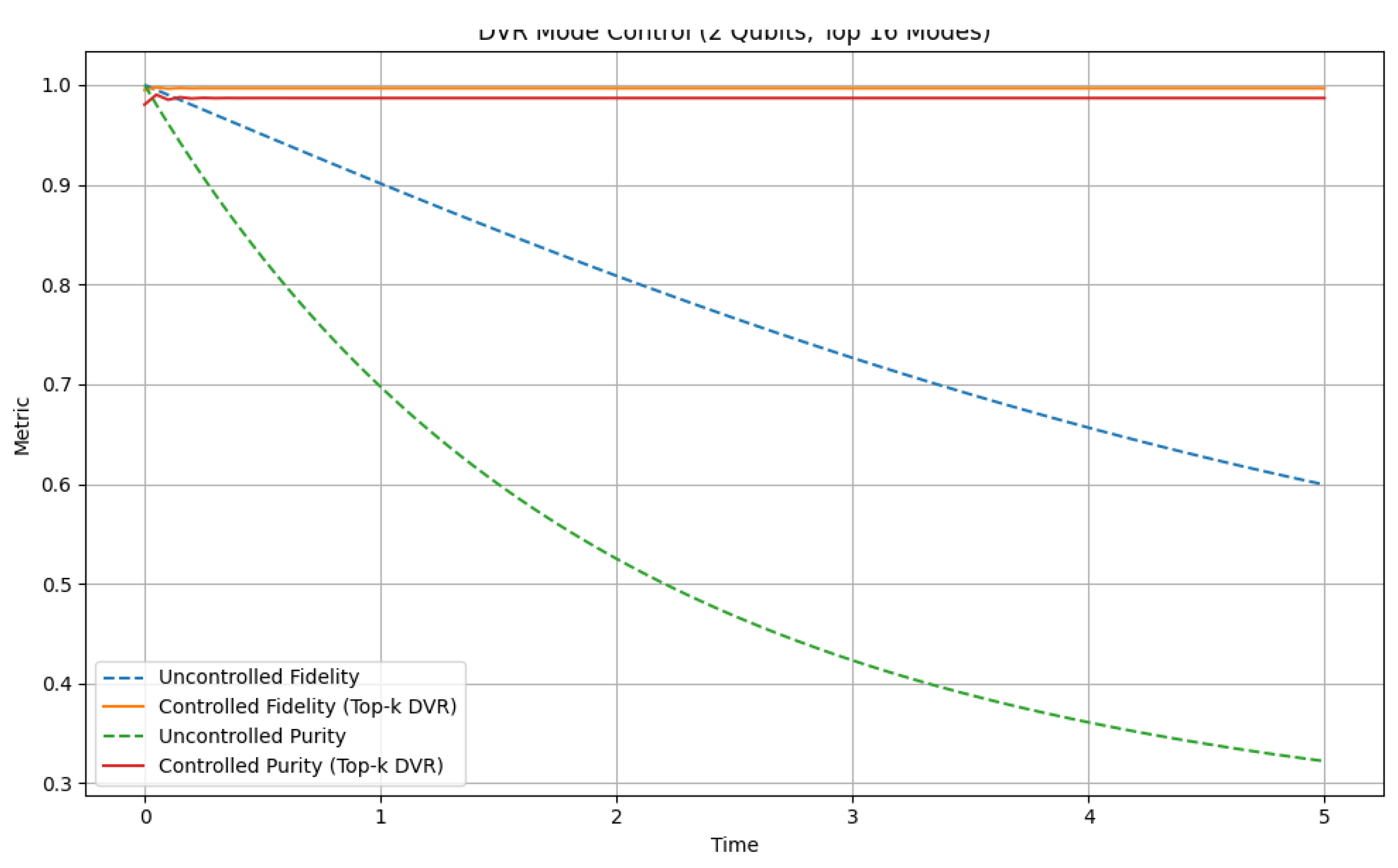
Figure 2.
Final fidelity as a function of the number of controlled DVR modes k in a 6-qubit system. Fidelity rises sharply even when controlling a small fraction of the 4096 total modes, confirming the compressibility of DVR-based control.
Figure 2.
Final fidelity as a function of the number of controlled DVR modes k in a 6-qubit system. Fidelity rises sharply even when controlling a small fraction of the 4096 total modes, confirming the compressibility of DVR-based control.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



