
Submitted:
09 June 2025
Posted:
10 June 2025
You are already at the latest version
Abstract
This paper addresses the aperture-limitation problem faced by array-equipped underwater gliders (UGs) in direction-of-arrival (DOA) estimation. A passive synthetic aperture (PSA) method for DOA estimation using a single hydrophone mounted on the UG is proposed. This method uses the motion of the UG to synthesize a linear array whose elements are positioned to acquire the target signal, thereby increasing the array aperture. The dead-reckoning method is used to determine the underwater trajectory of the UG, and the UG’s trajectory was corrected by the UG motion parameters, from which the array shape are adjusted accordingly and the position of the array elements was corrected. Additionally, array distortion caused by movement offsets due to ocean currents underwent linearization, reducing computational complexity. To validate the proposed method, a sea trial was conducted on 31 July 2018 in the South China Sea using the Haiyi 1000 UG equipped with a hydrophone, and its effectiveness was demonstrated through the processing of the collected data. The performance of DOA estimation prior to and following UG trajectory correction was compared to evaluate the impact of ocean currents on target DOA estimation accuracy.
Keywords:
passive synthetic aperture
; direction of arrival
; underwater glider
; single hydrophone
; trajectory correction
1. Introduction
The use of unmanned underwater vehicles equipped with acoustic arrays is an effective and competitive approach to passive direction-of-arrival (DOA) estimation [1]. Underwater gliders (UGs) are low-cost, long-endurance underwater vehicles that are primarily propelled through water by adjusting their buoyancy, with a trajectory resembling a sawtooth shape [2]. Figure 1 shows a UG performs fixed-source DOA estimation, which is affected by ocean currents during the process of gliding. There has been a substantial body of research analyzing DOA estimation based on UGs equipped with hydrophones, including deploying three-dimensional cross arrays on a UG to estimate the DOA [3] and installing omnidirectional hydrophones on a UG to determine the signal azimuth [4]. A UG equipped with dual hydrophones was used to achieve DOA estimation, and the left–right ambiguity in the DOA-estimation process was addressed using the natural oscillations of the vehicle’s heading [5,6]. Tesei et al. [7] used a Slocum UG equipped with an acoustic vector sensor to complete the estimation of the signal’s DOA. DOA estimation was also achieved by applying envelope-modulation detection to noise using an acoustic vector sensor [8,9]. To simplify the array mounting structure and reduce its load on the vehicle, Sun et al. [10] proposed a method using a UG to mount a tetrahedral array to complete three-dimensional DOA estimation of a target. This method was experimentally tested in the South China Sea; however, due to a limited array aperture, the estimation performance for low-frequency signals was poor [10]. The methods used in the aforementioned research require UGs to carry multiple sensors for DOA estimation, which increases both the load on the UG and its energy consumption, and it also limits the size of the array aperture that can be used.
Currently, there are various DOA-estimation methods for acoustic source localization, including Capon beamforming (CBF) [11], minimum variance distortionless response (MVDR) [12], subspace-based methods [13,14], and beamforming-based methods [15,16]. However, the performance of these methods is constrained by the limited array aperture. Passive synthetic aperture (PSA) algorithms, which exploit array motion to extend the effective aperture [17], offer a viable solution to this limitation. The Royal Netherlands Navy conducted PSA experiments in the Mediterranean Sea, using the HNLMS Mercuur underwater vehicle to tow a 24-m linear array at a constant speed and along a straight path. By comparing the CBF, MVDR, and PSA algorithms, it was found that for low-frequency signals, the PSA algorithm has better DOA estimation performance [18]. However, UGs exhibit markedly inferior maneuverability compared to propeller-driven systems. During towed-array operations, hydrodynamic forces induced by oceanic currents perturb the UG motion, leading to array geometry distortion that compromises signal processing performance.
To mitigate the impact of array geometry distortion caused by motion instability, related research has proposed dividing the linear towed array into sub-arrays for segmented processing, thereby enhancing beamforming performance [19]. Yang et al. [20] proposed a variational Bayesian expectation-maximization framework for DOA estimation using a deformed passive towed sonar array, aiming to reduce estimation errors caused by array geometry distortion. Given the significant load capacity required for towed linear arrays—beyond the capabilities of unmanned underwater vehicles—Yen proposed a method based on single-element synthetic arrays [21]. Subsequent research efforts have feasibility of demonstrated the single-element PSA implementation via beamforming-based methodologies [22,23]. Nevertheless, these investigations omitted a systematic examination of the motion dynamics inherent to unmanned underwater platforms.
This study presents a PSA processing framework leveraging the autonomous motion characteristics of a UG equipped with a single hydrophone. The proposed methodology integrates hydrodynamic trajectory estimation with hydrophone position calibration to enable high-resolution DOA estimation in challenging marine environments. The novel points of this paper are as follows.
- A PSA method for DOA estimation using a single hydrophone is proposed for UGs with low payload capacity, which leverages the motion trajectory of the platform while accounting for its limited maneuverability.
- By linearizing the hydrophone position and correcting the trajectory of the UG, the proposed method accurately reconstructs the array element positions, thereby enhancing the DOA estimation performance of the UG equipped with a single hydrophone.
- In response to the challenge of effectively estimating the DOA with a single hydrophone, a sea trial using the Haiyi 1000 UG in the South China Sea was conducted to realize DOA estimation for a UG under low-load conditions.
The remainder of this paper is structured as follows. Section 2 introduces the proposed method for a UG equipped with a single hydrophone for PSA, including the estimation of the UG’s position and calibration of the hydrophone’s position. Section 3 describes the overall situations of the experiment for DOA estimation conducted in the South China Sea with the Haiyi 1000 UG. The proposed method was applied to process the sea trial data, successfully achieving DOA estimation of the acoustic source. The effectiveness of the method was validated through comparison with the conventional PSA approach based on uniform linear array. Furthermore, the DOA estimation performance before and after trajectory correction of the UG was analyzed. An error analysis of the estimation results is also presented. Conclusions are given in Section 4.
2. PSA Method for a UG Equipped with a Single Hydrophone Based on Integrating Trajectory Estimation and Hydrophone Position Calibration
Single hydrophone inherently lacks the capability for DOA estimation, PSA techniques achieve DOA estimation by transforming temporal gain into spatial gain. The underwater trajectory of the UG must be analyzed in conjunction with its dynamic characteristics. As a weakly maneuverable platform, the UG is vulnerable to ocean current disturbances, which can cause deviations in the positions of the onboard hydrophone. Therefore, position calibration is necessary.
2.1. Principle of Single-Hydrophone PSA
The key to enabling PSA with a single hydrophone lies in performing aperture synthesis through phase compensation. Figure 2 shows a schematic diagram of signal reception by a moving hydrophone, in which represents the positions of each element after aperture synthesis. The received signal of the reference array element at time is given by
where f denotes the carrier frequency of the acoustic source, v is the velocity of the hydrophone, c is the propagation speed of acoustic signals in water, is the additive noise. The direction normal to the array is defined as , and is the azimuth angle of the acoustic source. The array’s received signal during aperture synthesis is
where represents the signals received by the single hydrophone at different positions during aperture synthesis, represents the signal received by the single hydrophone at position m; is the manifold matrix with each column representing the steering vector. From Equation (2), it can be seen that as long as the manifold matrix is reasonably modeled, the DOA-estimation problem can be solved. Here, we present the manifold matrix as
where .
2.2. Estimation of the UG’s Trajectory
The UG can determine its entry and exit positions on the sea surface using the Global Positioning System (GPS). However, its underwater positions can only be inferred from the depth data collected by the onboard conductivity–temperature–depth (CTD) sensor. In this study, the position of the UG is estimated using a dead reckoning approach. The trajectory of the UG is determined by integrating the motion model with the estimation of dynamic parameters.
Here, we establish two right-handed coordinate systems, as shown in Figure 3: the spatial fixed coordinate system and the carrier coordinate system , based on the frameworks recommended by the International Towing Tank Conference (ITTC) and the Society of Naval Architects and Marine Engineers (SNAME) [24].
The coordinate system is established with its origin defined at a point on the Earth’s surface at sea level. The -axis is oriented perpendicular to the sea surface and is defined as positive in the direction toward the Earth’s center, forming a right-handed coordinate system fixed to the sea surface. The carrier coordinate system is attached to the UG and moves with it as it traverses through space. The x-axis is perpendicular to the transverse section of the UG and points toward the bow. The y-axis is perpendicular to the longitudinal section and points to the starboard side. The z-axis is perpendicular to the horizontal plane of the UG and points downward, toward the underside of the UG.
Define the attitude angle vector of the UG as in the coordinate system . The roll angle is defined as positive when the UG rolls to starboard; the pitch angle is positive when the nose tilts upward; and the heading angle represents the azimuth relative to true north. Information on the attitude angles can be obtained from the electronic compass installed onboard the UG. Similarly, define the UG’s generalized velocity vector as in the coordinate system . Here, , and represent the eastward, northward and downward velocities of the UG, respectively.
To accurately model the motion behavior of the UG, it is essential to account for the misalignment between the UG’s velocity vector and its carrier coordinate axes caused by hydrodynamic forces. Accordingly, two characteristic angles are introduced: the attack angle and the drift angle . According to marine vehicle theory [25], the attack angle is defined as the angle between the projection of the velocity vector onto the x–z plane of the carrier coordinate system and the x-axis, i.e., The drift angle is defined as the angle between the projection of the velocity vector onto the x–y plane and the x-axis, given by The attack angle is functionally related to the pitch angle , i.e., , while the drift angle is typically related to the rudder angle of the UG, i.e., . The function and reflect the combined effects of hydrodynamic lift, drag, and the rotational moments acting on the UG. For the Haiyi 1000 UG, the rudder angle is defined within the range , where indicates alignment with the x-axis. In this convention, positive values of correspond to deflections toward the port side.
The UG’s navigation position is determined using Equations (4) and (5), thus obtaining its trajectory in seawater:
where and denote the UG’s coordinates at time t, and and represent the eastward and northward velocities of the ocean current. These are estimated through the deep-mean current [26]:
where and represent the actual and predicted positions of the UG in the east-up direction, and represent the actual and predicted positions of the UG in the north-up direction, and is the time taken for the UG to complete a cycle.
2.3. Hydrophone Position Correction During UG Movement
The motion characteristics of the UG and the influence of ocean currents result in estimation errors in the hydrophone’s position during the UG movement. The errors primarily originate from two sources:
- When the UG is modeled as a particle, the presence of attack and drift angles—corresponding to the pitch and heading angles, respectively—induces deviations in its trajectory. Additionally, ocean currents introduce further trajectory deviations, which in turn lead to positional offsets of the hydrophone.
- When the UG is not modeled as a particle, its inherent turning radius r leads to a positional offset of the hydrophone when the roll angle varies.
2.3.1. Trajectory Deviation Compensation for UG
During its movement, the UG is influenced by ocean currents, resulting in positional displacements. The component of the current velocity along the UG’s direction of motion, denoted as , and the component perpendicular to it, denoted as , are calculated as follows. The relationships among the various velocity components are illustrated in Figure 4.
The positional offsets of the hydrophone caused by ocean currents is denoted as , as illustrated in Figure 5. Here, represents the time elapsed from the UG’s entry into the water to the moment of synthetic aperture.
The open ocean current database indicates that actual ocean currents exhibit three-dimensional variations [27]. The deep-mean current used in this paper for dead reckoning differs from the actual ocean current, leading to trajectory errors.
The attack angle and drift angle contribute to an offset in the position of the hydrophone, which is reflected in the trajectory deviation of the UG due to the change in its direction of motion. Through the definition of attack angle and drift angle, the corrected velocity vector can be obtained, where . In this paper, the motion trajectory of the UG is corrected using the corrected velocity vector.
2.3.2. Positional Offset of the Hydrophone Induced by Roll Angle
The position difference caused by roll angle between the UG and hydrophone is calculated as follows:
where: is the transformation matrix between the coordinate system E and O; and are the values of position offsets caused by roll motion in the carrier coordinate system and the spatial fixed coordinate system, respectively.
2.3.3. Linearized Correction of Hydrophone Position
The positional offsets of the hydrophone during the underwater movement of the UG are defined as , as shown in Figure 6.
The resulting phase component is given by
The data received by hydrophone m at time t is
where are the hydrophone’s positional offsets in the direction.
The method proposed in this paper projects the hydrophone positions along the trajectory onto a straight line and compensates for their phase to form a linear array. After linearization, which is transforming the nonlinear array generated by the element position offset into a linear array through projection position transformation, the hydrophone positions are denoted by .
The PSA method using a single hydrophone on board the UG includes the following steps:
- Estimate and correct the UG’s underwater trajectory.
- Correct for the positional offset of the mounted hydrophone caused by the motion characteristics.
- Extend the array linearization.
- Perform aperture synthesis via phase compensation.
- Estimate the DOA of the target.
3. Sea Trial for Source DOA Estimation with the UG
3.1. Overview of the Sea Trial
The sea trial for the acoustic source target was conducted on July 31, 2018. The experimental platform, Haiyi 1000 UG, was developed by the Shenyang Institute of Automation, Chinese Academy of Sciences. The experimental site located in the South China Sea, as depicted in Figure 7. The positions of the acoustic source are marked as dots in Figure 7. The same acoustic source is arranged at three positions at different times, deployed toward the coast in the order of red, green, and blue. The trajectories of the corresponding acoustic received signals are marked as lines with the same color.
Bathymetric data from the General Bathymetric Chart of the Oceans [28] was used to obtain the seafloor topography for the experiment. Figure 8(a) shows topographic maps of the experimental area. The sound speed in the experimental area was calculated using the CTD data collected by the UG and Chen–Millero formula (see Equation (11) [29]. Figure 8(b) presents the sound-speed profile for the operational area.
In the experiment, Haiyi 1000 was equipped with a single hydrophone and reached a maximum operational depth of 1000 m, as shown in Figure 8(c). A shipboard acoustic source is used as a simulation target, and the transmitting system consists of a UW350 acoustic source, an amplifier and a signal generator. The experiment also utilizes auxiliary equipment such as GPS, TD, and CTD. The GPS is utilized to record the position of the mother ship during the experiment, while the TD is used to determine the depth of the acoustic source.
3.2. Signal and Array Element Arrangement for PSA
3.2.1. Signal Selection
Using shipborne GPS data, the surface motion trajectory of the vessel and the position of the acoustic source were obtained, enabling the calculation of the DOA measurement of the acoustic source relative to the UG. Figure 9 shows the positions of the UG and the acoustic source during the experiment.
Prior to the execution of synthetic aperture processing, it is imperative to select the received signals from the UG. In this experiment The target signal was a 405-Hz single-frequency pulse signal with a period of 120 s and a pulse width of 5 s, the acoustic source level at 1m is about 166.7dB re 1 Pa. The hydrophone had a sensitivity of -170 dB referenced to 1 V/µPa and operated within a frequency range of 50 Hz to 4 kHz. Figure 10(a) shows the time-frequency spectrum of the signal received along the red trajectory of UG in Figure 7, where the segment enclosed in the blue box is used for synthetic aperture processing. The UG is situated in a deep-sea area, and the distance between the corresponding UG and the target acoustic source is 17 km–19 km. The Signal-to-Noise Ratio (SNR) is 1.66 dB. Between 2050 and 2320 seconds, the UG’s oil pump is operational to increase buoyancy, resulting in a noise level of 125 dB. This noise level is significantly higher than the target signal, resulting in suboptimal signal quality during this interval. As illustrated in Figure 10(b), the time-frequency spectrum of the signal received along the green trajectory of UG in Figure 7 is presented, the distance between the corresponding UG and the target acoustic source is about 28 km. The UG is situated near the surface. Due to the influence of wind-generated noise on the surface, the noise level of this segment is high, with a SNR of dB. Figure 10(c) corresponds to the time-frequency spectrum of the signal received along the blue trajectory in Figure 7, the distance between the UG and the target acoustic source is more than 50 km. The SNR of this segment is dB.
In consideration of the SNR and signal quality, the received signals along the red trajectory during the non-oil pump operating hours were ultimately selected as the data source for PSA in this paper.
3.2.2. Determination of the Array Elements Positions
The attack angle and drift angle were calculated according to the methods outlined in Section 2. Figure 11 shows the calculated attack angle and drift angle for this test cycle.
The positions of the array elements were determined by first calculating the speed and heading of the UG based on electronic compass readings and internal navigation parameters. Using Equations (4) and (5), the trajectory of the UG was reconstructed and extrapolated prior to trajectory correction. The black line in Figure 12 illustrates the uncorrected trajectory, while the blue line represents the trajectory after applying corrections based on the UG’s attitude angle, attack angle and drift angle. The red segment along the trajectory indicates the section selected for synthetic aperture processing.
The four synthetic apertures were applied to the data from experiment, resulting in a four-element array, and eight cycles of passive synthetic aperture DOA estimation were performed based on experimental data. Corrections were made for the position offset caused by the motion parameters of the UG. The direction of motion of the UG during the synthesis of the first element was used as the reference direction. The four elements underwent linearization correction processing, forming a four-element linear array. The array configuration before the UG trajectory correction is shown in Figure 13(a). According to Equation (12), the maximum positional offset of the array elements before and after each cycle of linearization correction is within 6.86 m.
where and represent the positions of the array elements before and after linear correction, respectively. The array configuration after trajectory correction is illustrated in Figure 13(b), with the maximum positional offset between pre- and post-correction within 10.12 m. The blue points represent the positions before correction, and the red points represent the corrected positions.
3.3. DOA Estimation Results and Analysis
In this section, comparative experiments were conducted using the PSA method under uniform linear motion as the control group. The DOA estimation errors over eight cycles were statistically analyzed, and the estimation performance of the UG before and after trajectory correction was compared. Furthermore, the sources of DOA estimation errors were examined, along with an analysis of the causes behind the occurrence of dual peaks and side lobes in the estimation results.
In the experiment, the coordinates of the acoustic source were (N, E), and through dead reckoning, the UG’s coordinates for per DOA estimation can be obtained. The estimated DOA is shown in Figure 14. We can obtain from the coordinates between the acoustic source and the UG, from the array shape and the moving direction of the UG, and the azimuth from the geometric relation. Taking one of the DOA estimates as an example, the angle of the acoustic source relative to the UG, i.e. was . The direction of the UG’s movement , i.e. was . The array normal direction was taken as the reference direction. The actual DOA was .
3.3.1. Performance Comparison for DOA Estimation
In essence, the PSA method assumes that array elements undergo uniform linear motion, thereby forming a uniform linear array. However, when a UG carries a single hydrophone, its trajectory is influenced by both ocean currents and its own motion dynamics, making the realization of ideal uniform linear motion challenging.
To evaluate the effectiveness of the proposed method, comparative experiments were conducted against the PSA method under ideal uniform motion conditions. The uniform linear array was synthesized according to the reception time at the speed of the first array element. As shown in Figure 15(a), the DOA estimation result in the given example obtained using uniform linear array was , with an estimation error of . In contrast, Figure 15(b) presents the DOA estimation result for the linearized array after trajectory correction in the given example, yielding with an estimated error of .
Table 1 summarizes the DOA estimation errors across eight experimental cycles for three array configurations: a uniform linear array, and a linearized array before and after trajectory correction. The uniform linear array produced a mean error of , while the linearized array after trajectory correction achieved a substantially lower mean error of . Compared with the PSA method based on uniform linear motion, the proposed method improves DOA estimation performance by 72%.
One reason for the estimation errors is the errors in the calculation of the array-element positions, which arise from the estimated error in ocean-current speed during trajectory calculation. Another reason for the estimation errors is azimuth-calculation errors caused by the trajectory-calculation errors in the coordinates of the UG when calculating the actual azimuth. Left–right ambiguity in the linear array leads to two peaks. The existence of side lobes is attributed to the spacing between the hydrophones exceeding half the wavelength of the acoustic source signal.
3.3.2. Effect of UG Motion Parameters on DOA Estimation Performance
As shown in Figure 16(a), the DOA estimation result for the UG prior to trajectory correction in the given example is , with an estimation error of . In contrast, Figure 16(b) illustrates the result following trajectory correction, yielding an estimation error of .
According to Table 1, the DOA estimation errors over eight cycles before trajectory correction have a mean of and a variance of 5.42. After applying the trajectory correction, the mean error decreases to , and the variance is reduced to 0.45.
The results demonstrate that the proposed trajectory correction method reduces the DOA estimation error by 56% and significantly enhances the stability of the estimation performance.
4. Conclusions
In this paper, a method for DOA estimation using a single hydrophone mounted on a UG is proposed. The UG’s trajectory was estimated through dead reckoning and subsequently corrected by incorporating motion parameters such as roll angle, attack angle, and drift angle. This correction improves the accuracy of array element positioning. To further reduce computational complexity and streamline the synthetic aperture process, the reconstructed array was linearized.
The proposed method was validated through sea trial conducted in the South China Sea using the Haiyi 1000 UG. The experimental results demonstrated a mean DOA estimation error of using a linearized array before and after trajectory correction.
Comparative experiments were conducted from two perspectives: first, the proposed method was compared with the conventional PSA approach based on uniform linear motion, showing a 72% improvement in DOA estimation accuracy. Second, DOA estimation performance before and after trajectory correction of the UG was analyzed, with the proposed correction reducing the mean estimation error by 56% and significantly enhancing estimation stability.
Additionally, the results highlight the importance of addressing trajectory deviations caused by ocean currents. Future work may focus on improving positioning accuracy through enhanced calibration using additional sensors or high-precision ocean current field estimation techniques.
Author Contributions
Conceptualization, Y.M. and J.S.; methodology, Y.M. and J.S.; validation, J.S., S.L and Y.Z.; formal analysis, Y.M., J.S. and Sl.L; Resources, S.L. and J.S.; data curation, T.H. and Y.M.; writing—original draft preparation, Y.M.; writing—review and editing, J.S.; funding acquisition, J.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported in part by the National Natural Science Foundation of China under Grant 52271353, in part by the Fundamental Research Program of Shenyang Institute of Automation, Chinese Academy of Sciences under Grant 2022JC3K05 and Grant 2023JC3G03, in part by the State Key Laboratory of Robotics at Shenyang Institute of Automation under Grant 2022-Z11 and Grant 2024-Z15.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data supporting the research findings are included in the article. For further inquiries, please contact the corresponding author.
Acknowledgments
The authors greatly appreciate the constructive comments of the reviewers and the editor.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Odom, J.L.; Krolik, J.L.; Rogers, J.S. Maximum-likelihood spatial spectrum estimation in dynamic environments with a short maneuverable array. J. Acoust. Soc. Am. 2013, 133, 311–322. [Google Scholar] [CrossRef] [PubMed]
- Singh, Y.; Bhattacharyya, S.K.; Idichandy, V.G. CFD approach to modelling, hydrodynamic analysis and motion characteristics of a laboratory underwater glider with experimental results. J. Ocean Eng. Sci. 2017, 2, 90–119. [Google Scholar] [CrossRef]
- Jiang, Y.M. Direction-of-arrival estimation using a three-dimensional cross array equipped underwater glider. J. Acoust. Soc. Am. 2016, 140, 3172–3172. [Google Scholar] [CrossRef]
- Jiang, Y.M.; Osler, J. Underwater source localization using a hydrophone-equipped glider. In Proceedings of the Proceedings of Meetings on Acoustics. AIP Publishing, 2013, Vol. 19.
- Küsel, E.T.; Munoz, T.; Siderius, M.; Mellinger, D.K.; Heimlich, S. Marine mammal tracks from two-hydrophone acoustic recordings made with a glider. Ocean Sci. 2017, 13, 273–288. [Google Scholar] [CrossRef]
- Küsel, E.T.; Siderius, M. Bearing and range tracking with a two-hydrophone ocean glider. J. Acoust. Soc. Am. 2018, 144, 1805–1805. [Google Scholar] [CrossRef]
- Tesei, A.; Stinco, P.; Micheli, M.; Garau, B.; Biagini, S.; Troiano, L.; Guerrini, P. A buoyancy glider equipped with a tri-dimensional acoustic vector sensor for real-time underwater passive acoustic monitoring at low frequency. In Proceedings of the OCEANS 2019-Marseille. IEEE, 2019, pp. 1–6.
- Stinco, P.; Tesei, A.; Ferri, G.; Biagini, S.; Micheli, M.; Garau, B.; LePage, K.D.; Troiano, L.; Grati, A.; Guerrini, P. Passive acoustic signal processing at low frequency with a 3-D acoustic vector sensor hosted on a buoyancy glider. IEEE J. Oceanic Eng. 2020, 46, 283–293. [Google Scholar] [CrossRef]
- Stinco, P.; Tesei, A.; Dreo, R.; Micheli, M. Detection of envelope modulation and direction of arrival estimation of multiple noise sources with an acoustic vector sensor. J. Acoust. Soc. Am. 2021, 149, 1596–1608. [Google Scholar] [CrossRef] [PubMed]
- Sun, D.; Zhang, K.; Mei, J.; Shi, J.; Lv, Y. Low frequency three-dimensional DOA estimation for underwater gliders using an arbitrary tetrahedral array. Appl. Acoust. 2023, 214, 109707. [Google Scholar] [CrossRef]
- Chen, Y.; Goldsmith, A.J.; Eldar, Y.C. Channel capacity under sub-Nyquist nonuniform sampling. IEEE Trans. Inf. Theory 2014, 60, 4739–4756. [Google Scholar] [CrossRef]
- Capon, J. High-resolution frequency-wavenumber spectrum analysis. Proc. IEEE 1969, 57, 1408–1418. [Google Scholar] [CrossRef]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Transactions on acoustics, speech, and signal processing 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Kautz, G.M.; Zoltowski, M.D. Beamspace DOA estimation featuring multirate eigenvector processing. IEEE Trans. Signal Process. 1996, 44, 1765–1778. [Google Scholar] [CrossRef]
- Xu, G.; Silverstein, S.D.; Roy, R.H.; Kailath, T. Beamspace ESPIRIT. IEEE Trans. Signal Process. 1994, 42, 349–356. [Google Scholar]
- Williams, R.; Harris, B. Passive acoustic synthetic aperture processing techniques. IEEE J. Oceanic Eng. 1992, 17, 8–15. [Google Scholar] [CrossRef]
- Colin, M.E.G.D.; Groen, J.; Quesson, B.A.J. Experimental comparison of bearing estimation techniques for short passive towed sonar arrays. In Proceedings of the Oceans ’04 MTS/IEEE Techno-Ocean ’04 (IEEE Cat. No.04CH37600), 2004, Vol. 2, pp. 608–612.
- Lu, D.; Xing, G.; Luo, T.; Zhang, Q. On Robust Beamforming for Distorted Towed Linear Array Using Product Theorem. Acoust. Aust. 2020, 48, 211–219. [Google Scholar] [CrossRef]
- Yang, J.; Yang, Y.; Liao, B. Sparse Bayesian Synthetic Aperture Processing Based DOA Estimation with Deformed Towed Arrays. In Proceedings of the ICASSP 2024-2024 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). IEEE, 2024, pp. 13161–13165.
- Yen, N. A circular passive synthetic array: An inverse problem approach. IEEE J. Oceanic Eng. 1992, 17, 40–47. [Google Scholar] [CrossRef]
- Ke, Z.; Peng, M.; Jian-yun, Z. DOA estimation algorithm based on FFT in switch antenna array. In Proceedings of the Proceedings of 2011 IEEE CIE International Conference on Radar. IEEE, 2011, Vol. 2, pp. 1425–1428.
- See, C.M.S. A single channel approach to high resolution direction finding and beamforming. In Proceedings of the 2003 IEEE International Conference on Acoustics, Speech, and Signal Processing, 2003. Proceedings.(ICASSP’03). IEEE, 2003, Vol. 5, pp. V–217.
- Kim, Y.; Hermansky, G. Uncertainties in seakeeping analysis and related loads and response procedures. Ocean Engineering 2014, 86, 68–81. [Google Scholar] [CrossRef]
- Triantafyllou, M.S.; Hover, F.S. Maneuvering and control of marine vehicles; Massachusetts of Institute of Technologyq, 2003.
- Merckelbach, L.M.; Briggs, R.D.; Smeed, D.A.; Griffiths, G. Current measurements from autonomous underwater gliders. In Proceedings of the 2008 IEEE/OES 9th Working Conference on Current Measurement Technology. IEEE, 2008, pp. 61–67.
- Copernicus Marine Service. Global Ocean Physics Analysis and Forecast. Available at: https://data.marine.copernicus.eu/, 2024. Accessed: September 7, 2024.
- British Oceanographic Data Centre. General Bathymetric Chart of the Oceans. Available at: https://www.gebco.net/, 2024. Accessed: September 7, 2024.
- Chen, C.T.; Millero, F.J. Speed of sound in seawater at high pressures. J. Acoust. Soc. Am. 1977, 62, 1129–1135. [Google Scholar] [CrossRef]
Figure 1.
A UG performs fixed-source DOA estimation, which is affected by ocean currents during the process of gliding.
Figure 1.
A UG performs fixed-source DOA estimation, which is affected by ocean currents during the process of gliding.
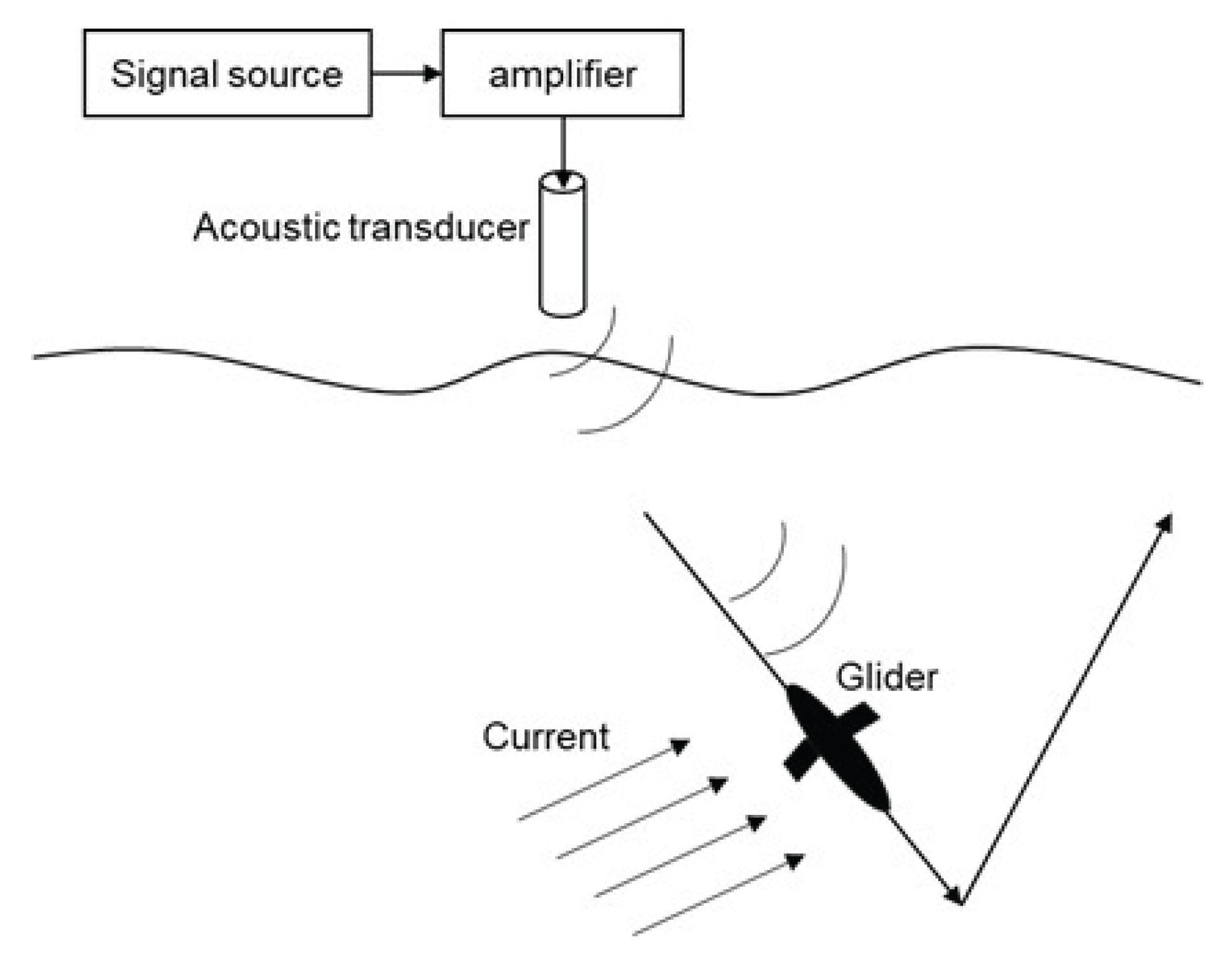
Figure 2.
Schematic diagram of signal reception by each element in the extended array.
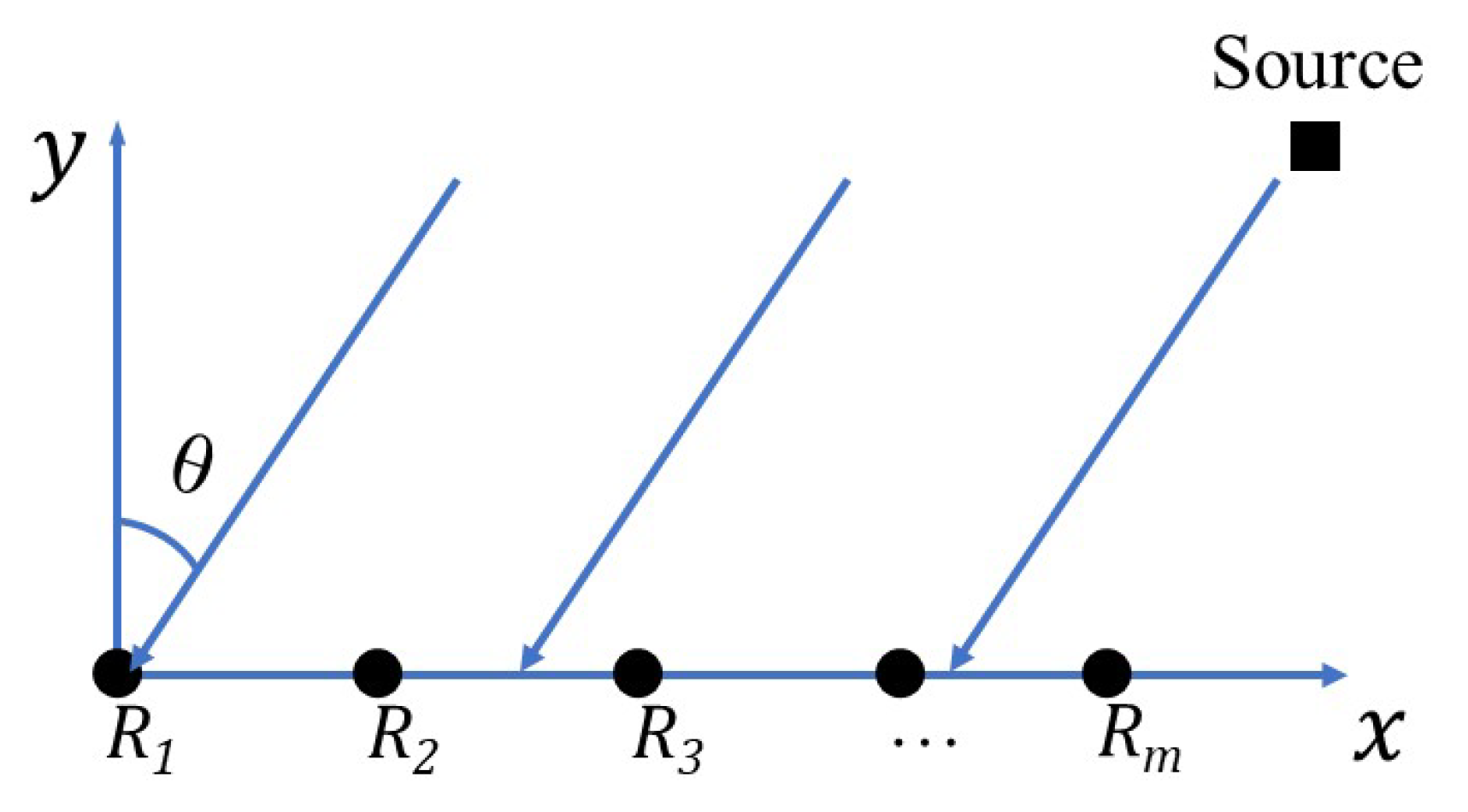
Figure 3.
Motion characteristics of the UG under the influence of ocean currents. (a) Motion deviation caused by ocean currents. (b) Coordinate systems and motion parameters of the UG.
Figure 3.
Motion characteristics of the UG under the influence of ocean currents. (a) Motion deviation caused by ocean currents. (b) Coordinate systems and motion parameters of the UG.
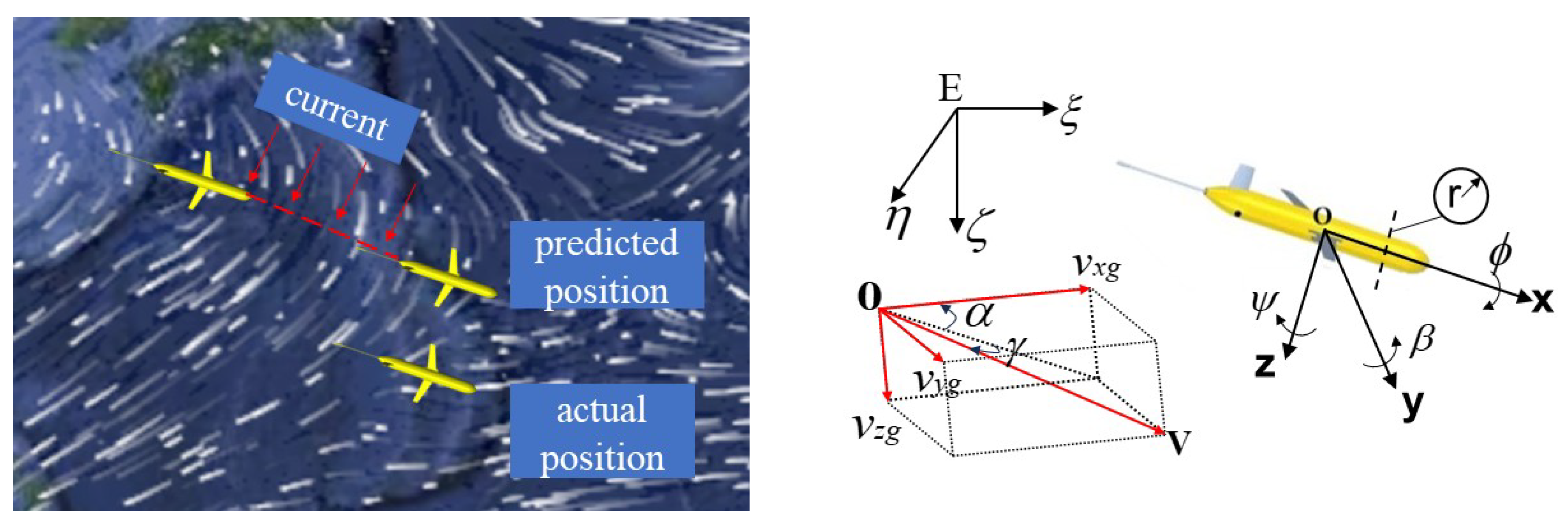
Figure 4.
Schematic diagram of the relationship between UG velocity and current velocity.
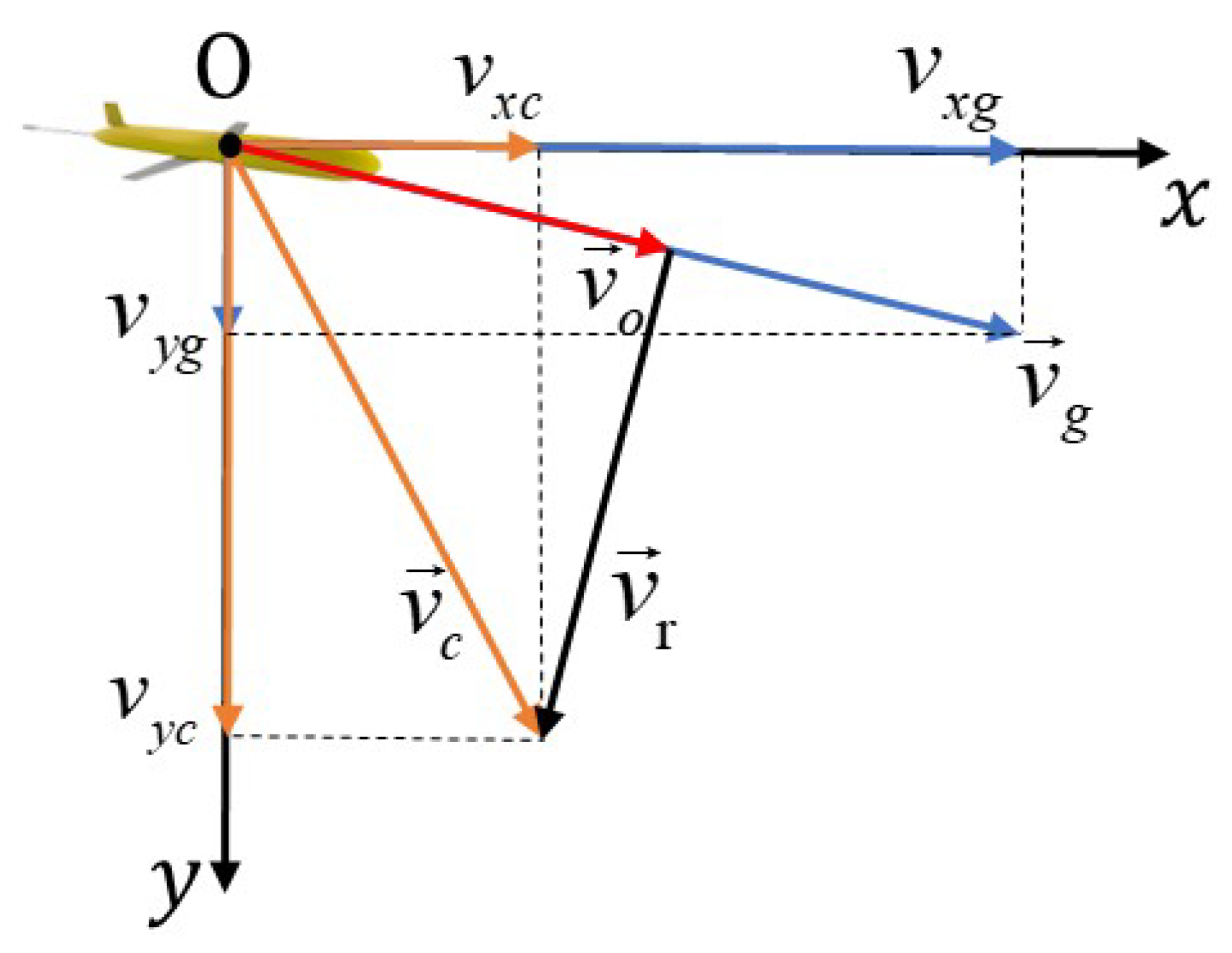
Figure 5.
Diagram of the positional shift of the array element caused by the ocean currents.
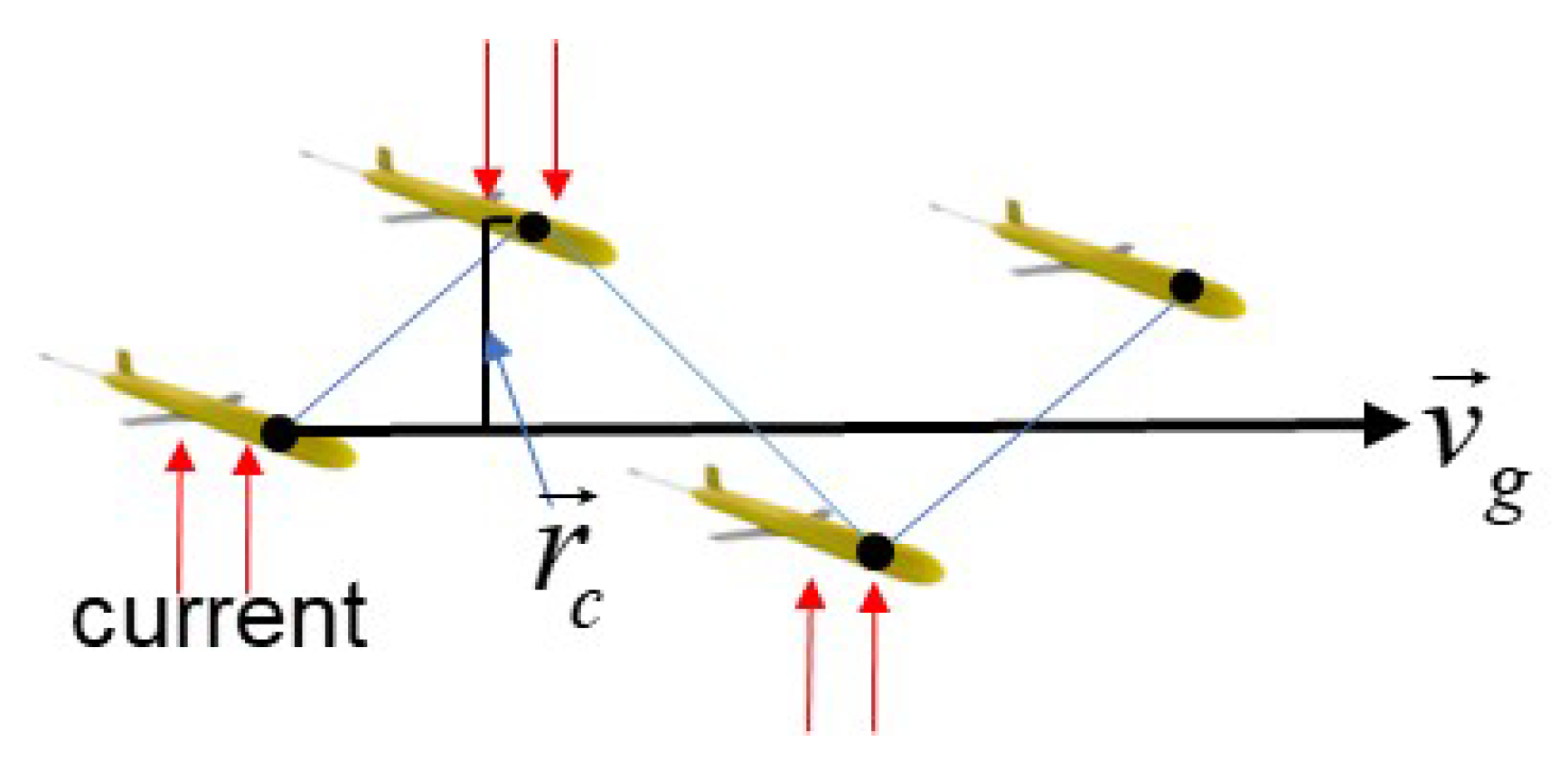
Figure 6.
Diagram of single hydrophone PSA under UG motion offset.
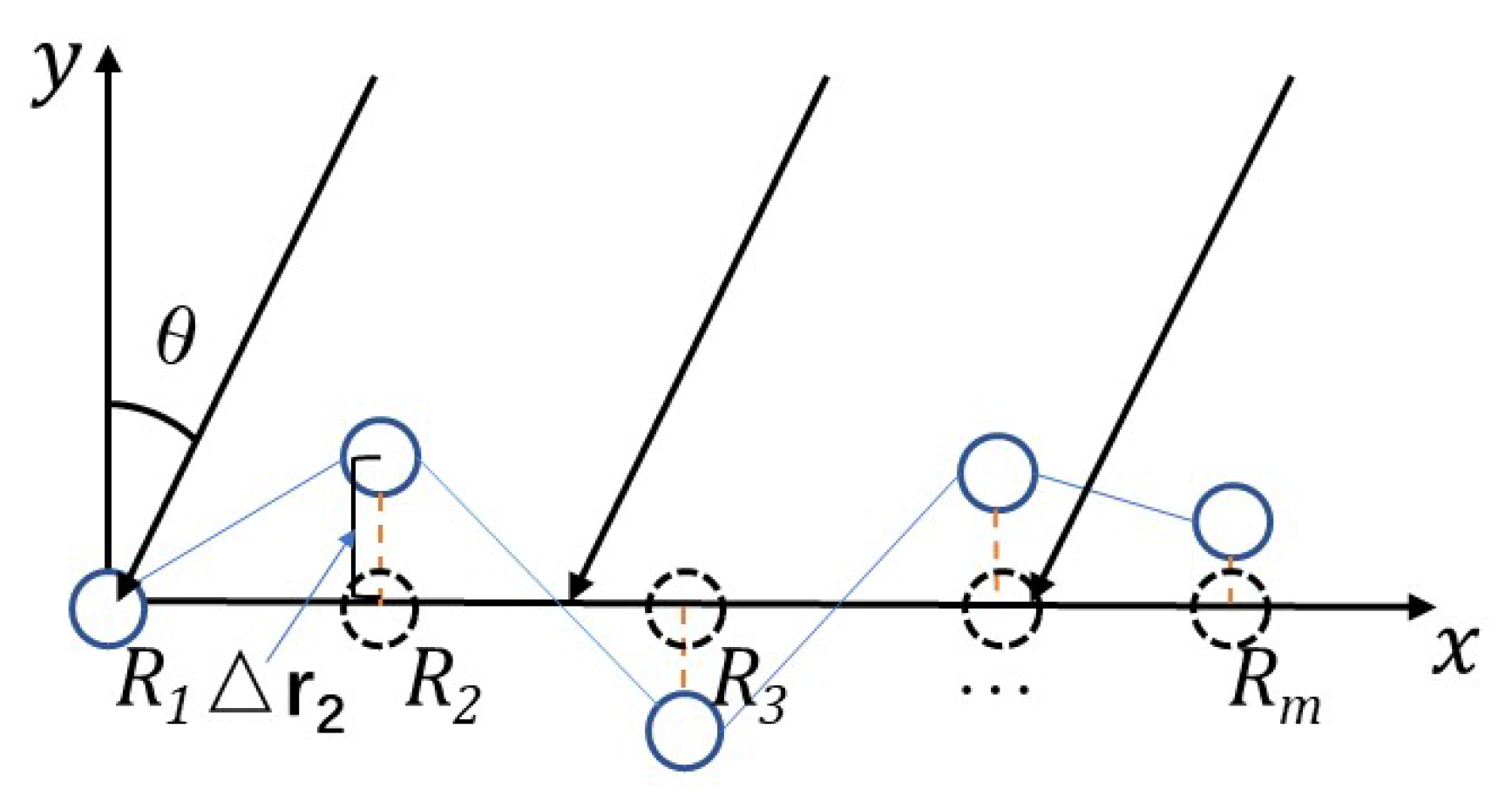
Figure 7.
Acoustic source location and UG trajectories.
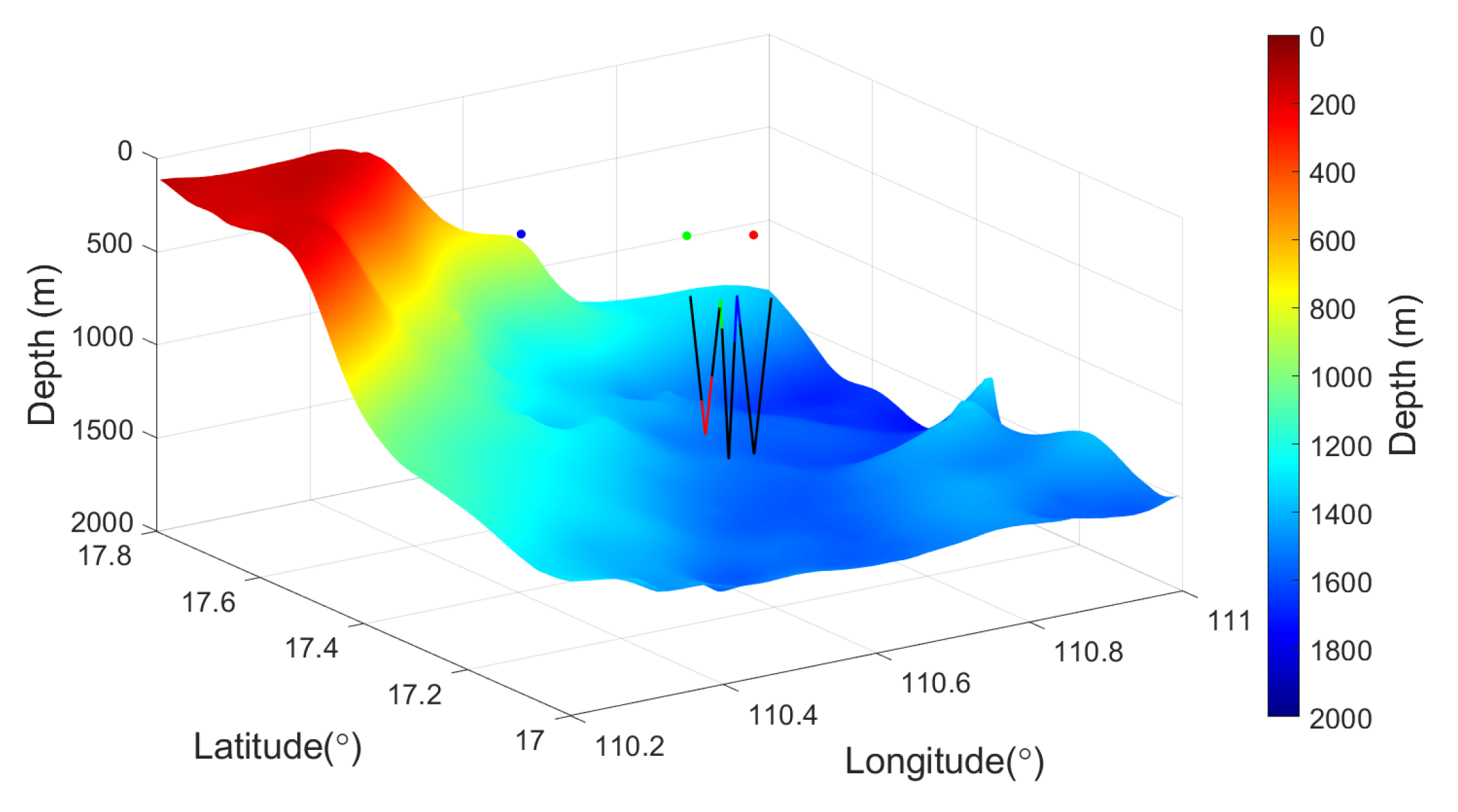
Figure 8.
Environment of the experiment and the Haiyi 1000 UG. (a) Bathymetric map of the experimental site. (b) Sound speed profile during a diving process of the UG. (c) Photograph of the Haiyi 1000 UG equipped with a hydrophone.
Figure 8.
Environment of the experiment and the Haiyi 1000 UG. (a) Bathymetric map of the experimental site. (b) Sound speed profile during a diving process of the UG. (c) Photograph of the Haiyi 1000 UG equipped with a hydrophone.
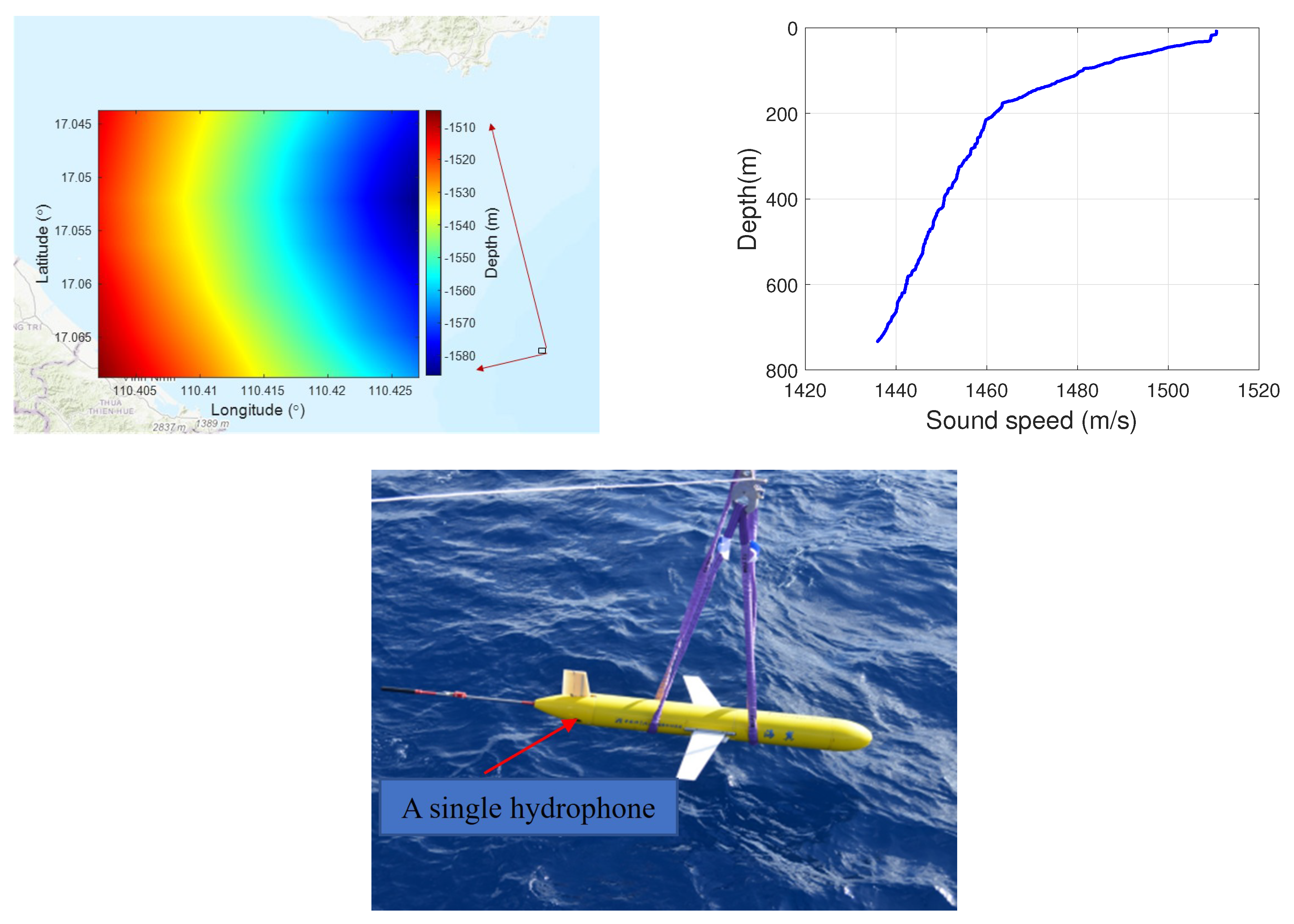
Figure 9.
Position of the acoustic source (black) and the motion trajectory of the Haiyi 1000 UG (red).
Figure 9.
Position of the acoustic source (black) and the motion trajectory of the Haiyi 1000 UG (red).
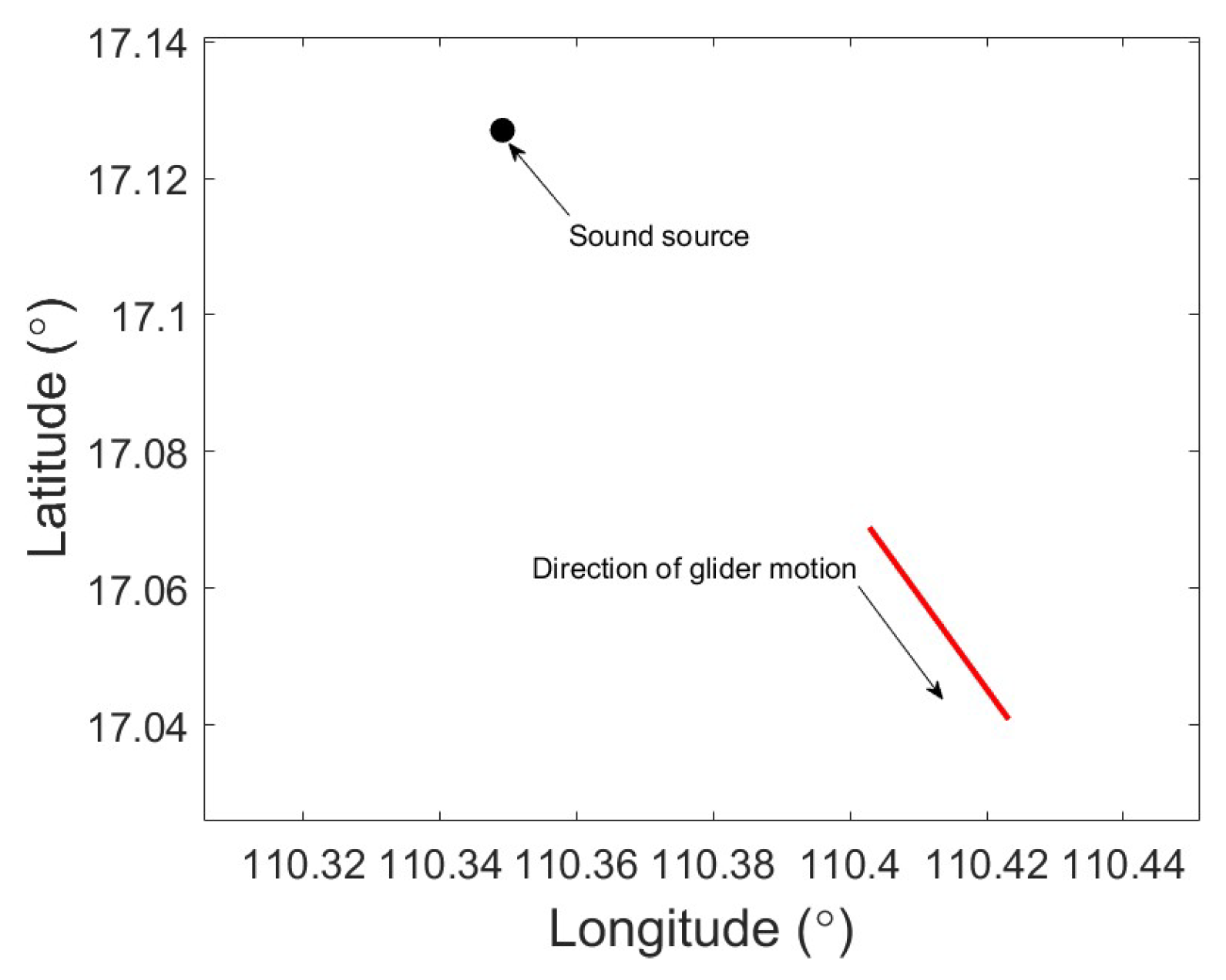
Figure 10.
Spectra of signals received by the UG at different source positions. (a) Source located at the red position. (b) Source located at the green position. (c) Source located at the blue position.
Figure 10.
Spectra of signals received by the UG at different source positions. (a) Source located at the red position. (b) Source located at the green position. (c) Source located at the blue position.
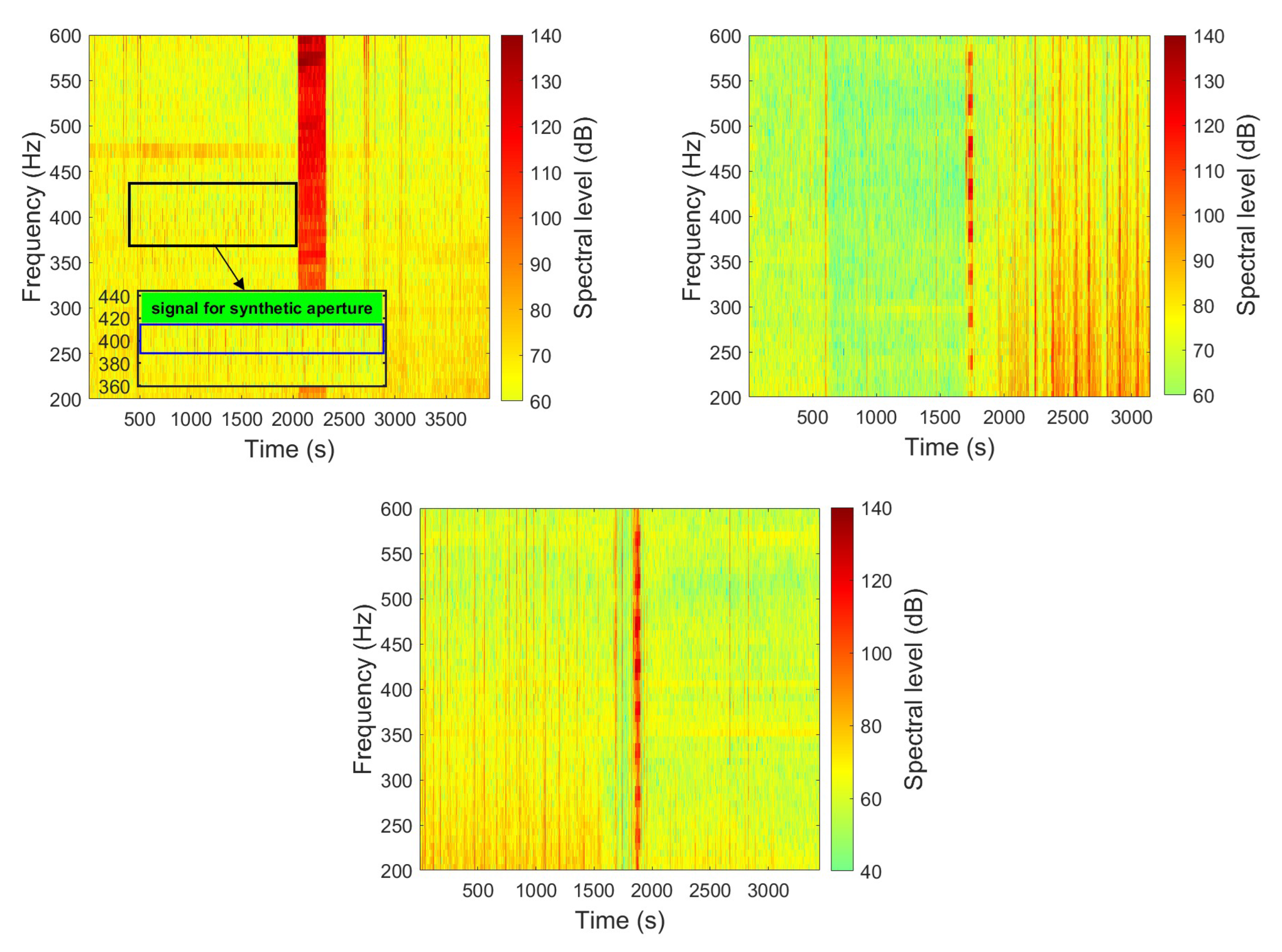
Figure 11.
Examples of motion parameters calculated during the experimental cycle. (a) Attack angle. (b) Drift angle.
Figure 11.
Examples of motion parameters calculated during the experimental cycle. (a) Attack angle. (b) Drift angle.
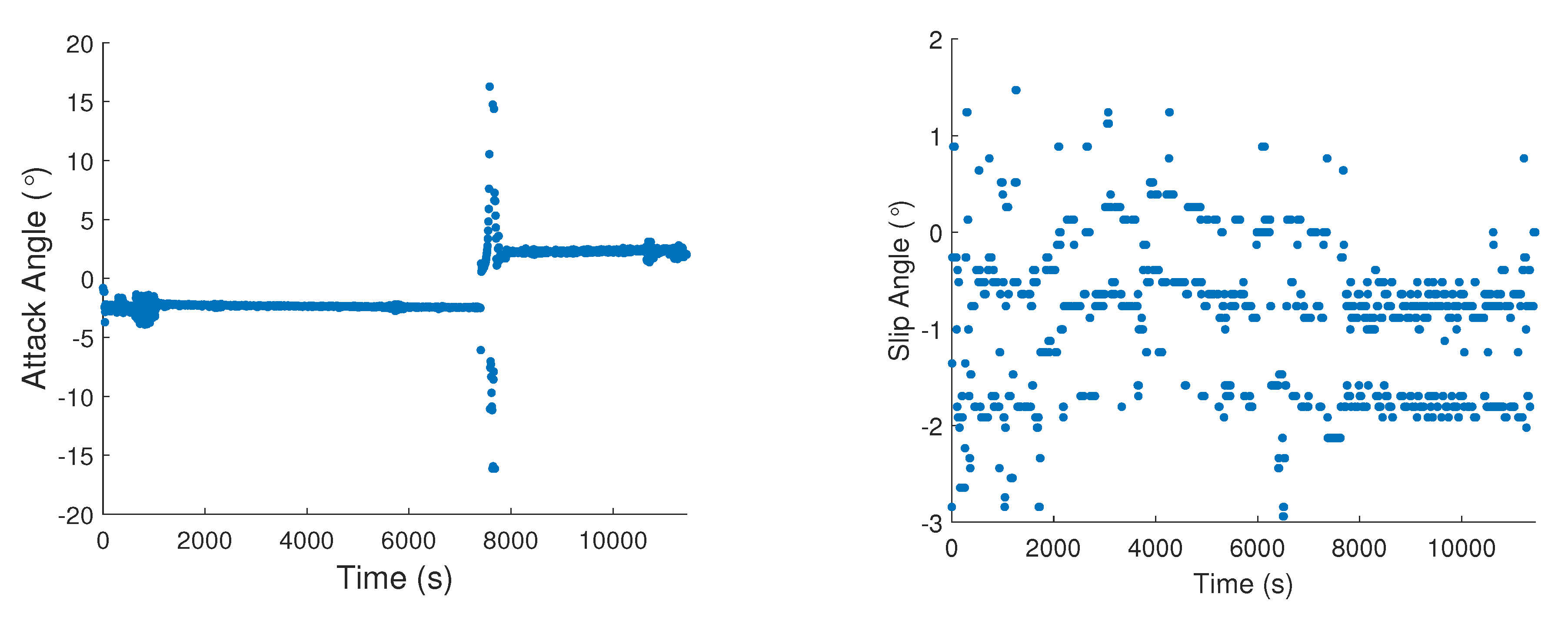
Figure 12.
Motion trajectories of the Haiyi 1000 UG prior (black) and following (blue) position correction. The red segments indicate the trajectories during synthetic-aperture process.
Figure 12.
Motion trajectories of the Haiyi 1000 UG prior (black) and following (blue) position correction. The red segments indicate the trajectories during synthetic-aperture process.
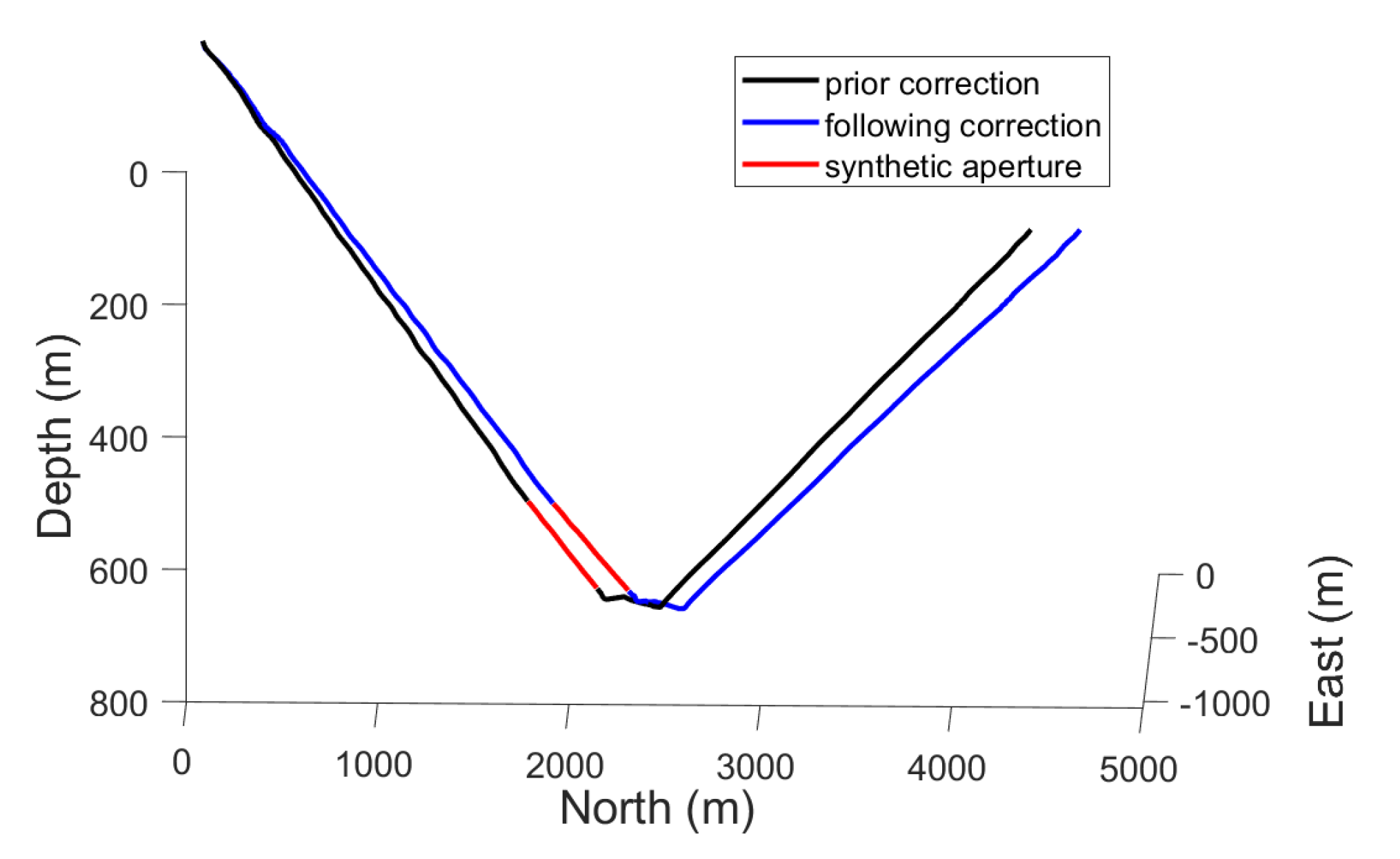
Figure 13.
Shape of the four-element synthetic aperture array before and after trajectory correction, blue points represent element positions before linearization, and red points represent positions after linearization correction. (a) Array shape before trajectory correction. (b) Array shape after trajectory correction.
Figure 13.
Shape of the four-element synthetic aperture array before and after trajectory correction, blue points represent element positions before linearization, and red points represent positions after linearization correction. (a) Array shape before trajectory correction. (b) Array shape after trajectory correction.
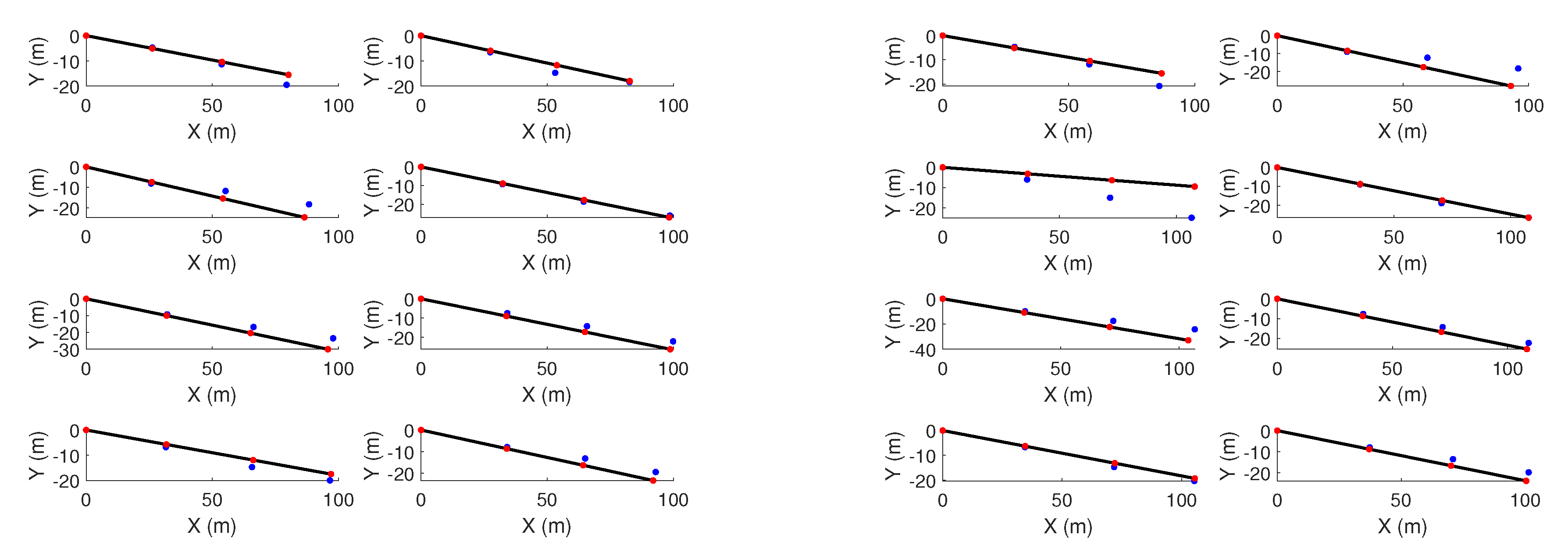
Figure 14.
Relative positions of the source and the synthetic-aperture array, with the black point representing the source location and the blue line representing the synthetic-aperture array after trajectory correction.
Figure 14.
Relative positions of the source and the synthetic-aperture array, with the black point representing the source location and the blue line representing the synthetic-aperture array after trajectory correction.
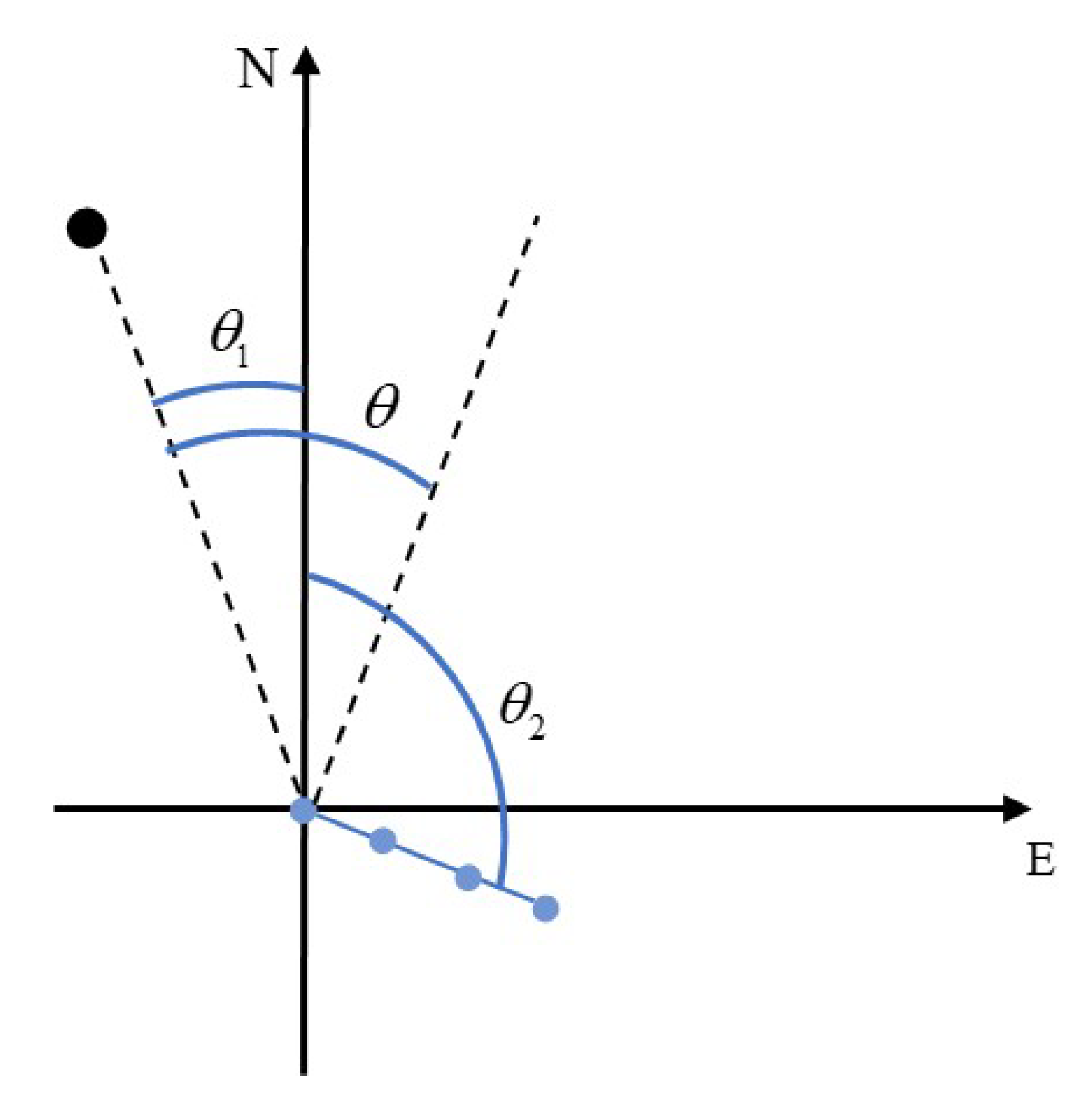
Figure 15.
DOA estimation results in the example using different array configurations. (a) Uniform linear array. (b) Linearized synthetic-aperture array.
Figure 15.
DOA estimation results in the example using different array configurations. (a) Uniform linear array. (b) Linearized synthetic-aperture array.
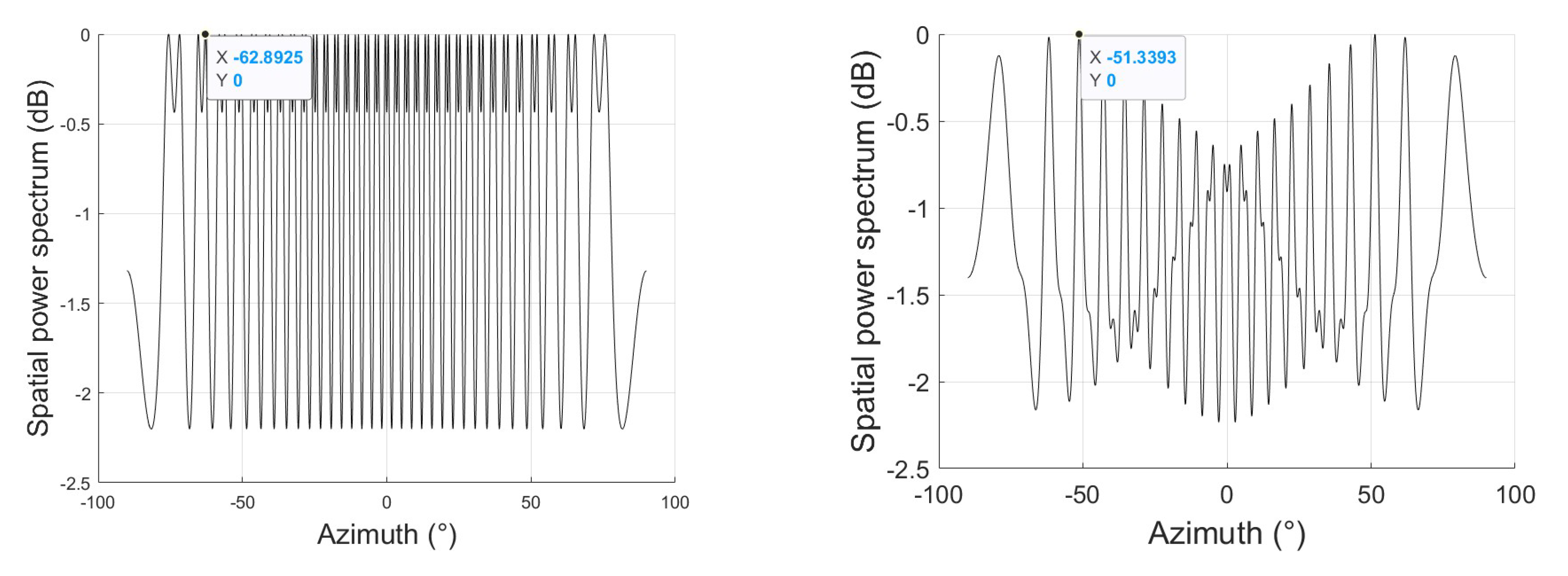
Figure 16.
DOA estimation results in the example under different trajectories. (a) Before trajectory correction. (b) After trajectory correction.
Figure 16.
DOA estimation results in the example under different trajectories. (a) Before trajectory correction. (b) After trajectory correction.
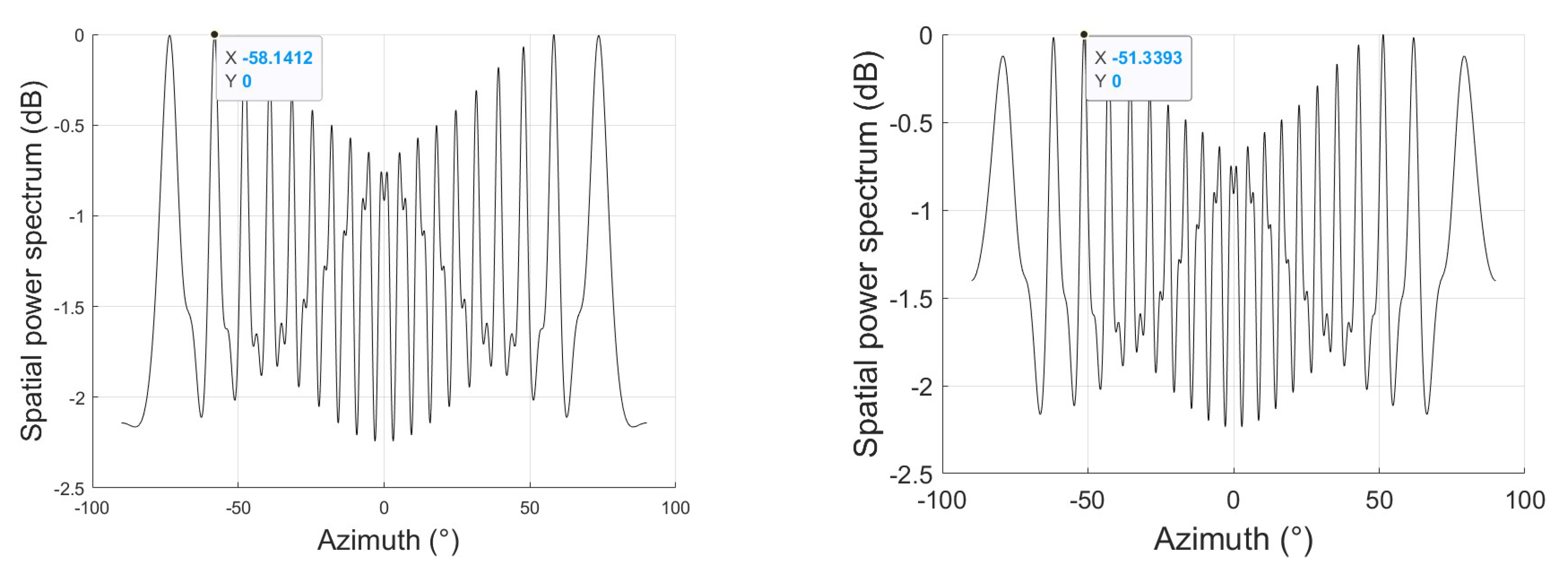

Table 1.
DOA estimation errors for different array configurations over 8 cycles
| Configuration | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| Uniform Array | 7.29° | 5.16° | 7.83° | 7.37° | 12.06° | 8.10° | 8.96° | 3.89° |
| Linear Array (Before Correction) |
5.54° | 3.26° | 2.16° | 4.57° | 4.21° | 5.25° | 4.21° | 10.01° |
| Linear Array (After Correction) |
1.19° | 2.34° | 3.40° | 1.74° | 2.31° | 1.67° | 2.55° | 1.94° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



