Submitted:
26 May 2025
Posted:
27 May 2025
Read the latest preprint version here
Abstract
This review provides a comprehensive analysis of recent advancements in lower limb exoskeleton systems, focusing on applications, control strategies, hardware architecture, sensing modalities, human-robot interaction, evaluation methods, and technical innovations. The study spans systems developed for gait rehabilitation, mobility assistance, terrain adaptation, pediatric use, and industrial support. Applications range from sit-to-stand transitions and post-stroke therapy to balance support and real-world navigation. Control approaches vary from traditional impedance and fuzzy logic models to advanced data-driven frameworks including reinforcement learning, recurrent neural networks, and digital twin-based optimization. These controllers support personalized and adaptive interaction, enabling real-time intent recognition, torque modulation, and gait phase synchronization across different users and tasks. Hardware platforms include powered multi-degree-of-freedom exoskeletons, passive assistive devices, compliant joint systems, and pediatric-specific configurations. Innovations in actuator design, modular architecture, and lightweight materials support increased usability and energy efficiency. Sensor systems integrate EMG, EEG, IMU, vision, and force feedback, supporting multimodal perception for motion prediction, terrain classification, and user monitoring. Human-robot interaction strategies emphasize safe, intuitive, and cooperative engagement. Controllers are increasingly user-specific, leveraging biosignals and gait metrics to tailor assistance. Evaluation methodologies include simulation, phantom testing, and human-subject trials across clinical and real-world environments, with performance measured through joint tracking accuracy, stability indices, and functional mobility scores. Overall, the review highlights the field’s evolution toward intelligent, adaptable, and user-centered systems, offering promising solutions for rehabilitation, mobility enhancement, and assistive autonomy in diverse populations. Following a detailed review of current developments, strategic recommendations are made to enhance and evolve existing exoskeleton technologies.
Keywords:
lower limb exoskeletons
; adaptive control systems
; human-robot interaction (HRI)
; rehabilitation robotics
; wearable assistive technology
1. Introduction
Lower limb exoskeletons represent one of the most promising advancements in wearable robotics, offering innovative solutions for mobility assistance, gait rehabilitation, and physical augmentation. Originally designed for military and industrial purposes, exoskeletons have evolved into highly sophisticated biomedical devices capable of restoring locomotor function in individuals with neuromuscular impairments. Their clinical applications span a wide spectrum, including spinal cord injuries (SCI), cerebral palsy (CP), stroke, and age-related mobility decline. With the rise of personalized healthcare and advances in control engineering, sensing technology, and human-robot interaction (HRI), the field has shifted toward developing intelligent, adaptable systems that respond dynamically to user intent and environmental conditions.
The application of exoskeletons in neurorehabilitation has grown substantially over the past decade. Robotic gait training, for instance, has been shown to significantly enhance motor outcomes in SCI patients. Reference [1] highlights notable improvements in standardized assessments such as the Spinal Cord Independence Measure (SCIM III), Walking Index for Spinal Cord Injury (WISCII), and the 6-Minute Walk Test (6MWT) when robotic therapy is compared with conventional methods. In pediatric populations, exoskeletons offer a novel means of improving gait mechanics and physical independence in children with CP. As shown in Reference [2], exoskeleton-assisted walking improves spatiotemporal gait parameters, increases energy efficiency, and supports greater hip and knee joint extension during stance phases.
While these outcomes underscore the therapeutic promise of lower limb exoskeletons, significant disparities remain between adult and pediatric applications. References [3,4] reveal that the pediatric exoskeleton market remains underdeveloped, with few clinically validated systems available. Pediatric devices must be designed to accommodate varying body sizes, developmental stages, and neuromotor impairments, making this segment uniquely challenging yet critically important. Current pediatric systems emphasize ergonomic form factors, minimal weight, and safety-conscious actuation thresholds. However, further clinical validation is necessary before these devices can be widely adopted.
From a technical standpoint, modern exoskeletons are increasingly incorporating adaptive control strategies that leverage biosignals and environmental feedback. Traditional methods such as impedance control and joint trajectory tracking are being complemented by more intelligent systems utilizing reinforcement learning, fuzzy logic, neural networks, and digital twins. These control algorithms allow exoskeletons to interpret electromyographic (EMG) signals, electroencephalography (EEG) activity, and inertial measurements to recognize gait phases, decode motion intention, and adjust assistance levels in real time. References [5,6] stress the importance of human motion intention recognition (HMIR) in enabling natural, responsive interaction between the user and the device.
Hardware and actuation technologies have similar advances. The field has seen a transition from rigid, heavy frames to lightweight, modular designs utilizing energy-efficient motors and compliant mechanisms. Innovations such as gravity-compensated joints, passive spring-damper systems, and bio-inspired actuators contribute to user comfort and reduce metabolic costs during use. Reference [7] discusses the importance of robust sensor integration and control feedback loops to enhance system responsiveness and user safety. Reference [8] addresses fall prevention strategies, such as Zero Moment Point (ZMP) and Lyapunov stability criteria, which are essential for real-world deployment in unstructured environments.
However, despite these achievements, the field faces several critical limitations. Clinically, many studies are limited by small sample sizes, short follow-up durations, and lack of control groups. These constraints reduce the statistical power of findings and limit generalizability across broader patient populations. Furthermore, outcome measures vary widely across studies, creating challenges for cross-comparison and meta-analyses. Pediatric exoskeleton research remains sparse, with limited data on long-term safety, adaptability, and developmental impact. Technically, current systems still struggle with stable and accurate control in dynamic or unpredictable settings. Many rely on lab-based validations that may not translate effectively to real-world usage.
Another persistent challenge lies in performance benchmarking. Reference [9] notes the absence of standardized evaluation frameworks, which hinder comparative analysis and slows the pathway from prototype to product. Similarly, Reference [10] introduces the concept of embodiment, how users neurologically integrate exoskeletons into their motor schema as a critical yet underexplored metric of system effectiveness. Quantitative tools like high-density EEG may offer new avenues for evaluating user-device synchrony and long-term neuroplastic changes.
Given the breadth of existing research and the rapid pace of innovation, there is a clear need for more targeted, domain-specific review articles to guide future development. Future reviews could focus on specific populations, such as pediatric users, stroke survivors, or the elderly to explore how design parameters, safety considerations, and clinical needs vary. Another important direction is the standardization of performance metrics, which would allow for consistent benchmarking across studies and devices. Reviews on human-in-the-loop control strategies, AI-driven motion prediction, and hybrid exoskeletons (combining active and passive elements) would also provide valuable insight into emerging trends.
In this review, we synthesize these multidisciplinary advancements, drawing from over a hundred recent works. We classify systems based on their control strategies, hardware configurations, sensing modalities, application focus, and evaluation approaches. The objective is to provide a comprehensive framework that captures the current landscape of lower limb exoskeleton research, highlights key innovations, identifies challenges, and outlines strategic opportunities for future development. As the field progresses toward intelligent, personalized, and context-aware systems, such a synthesis is essential for guiding research, design, and deployment of next-generation assistive technologies.
This review follows a structured and systematic format to ensure both clarity and analytical depth. Section 2 outlines the review methodology, including the sources of references and the selection criteria. Section 3 explores the various application domains of human lower extremity exoskeletons. Section 4 provides an in-depth examination of control strategies, highlighting their evolution and diversity. Section 5 addresses sensing modalities, perception algorithms, and their role in environmental interaction. Section 6 discusses advances in hardware design and actuation mechanisms. Section 7 focuses on human–robot interaction approaches, emphasizing user engagement and cooperative control. Section 8 reviews evaluation methodologies, subject types, and performance metrics. Section 9 summarizes key technological innovations and contributions across the field. Section 10 presents future research directions aimed at advancing the next generation of intelligent, adaptive, and user-centered exoskeleton systems. Section 11 concluded the main ideas, reinforces the central message, and provides a sense of closure to the work.
2. Methodology
This systematic review was conducted to identify, evaluate, and synthesize recent advancements in lower limb exoskeleton systems across domains of rehabilitation, assistive mobility, human-robot interaction, sensing technologies, control strategies, and hardware design. The review methodology followed a structured, multi-phase process consisting of literature identification, screening, eligibility assessment, and final inclusion, in line with established best practices for engineering-focused systematic reviews.
2.1. Literature Search and Identification
A comprehensive literature search was performed across multiple academic databases including IEEE Xplore and ScienceDirect. The search strategy incorporated a combination of keywords and Boolean operators, targeting terms such as "lower limb exoskeleton," "wearable robotics," "rehabilitation gait assistance," "human-robot interaction," "adaptive control," and "exoskeleton robot sensor fusion." The search was limited to English-language peer-reviewed journal articles and conference papers published between 2016 and 2024 to ensure relevance to current technologies.
2.2. Inclusion and Exclusion Criteria
Articles were considered eligible if they met the following criteria:
- Focused on lower limb or full-body exoskeleton systems with application to gait, posture, or mobility.
- Introduced original control algorithms, hardware innovations, sensing modalities, or human-robot interaction mechanisms.
- Included evaluation through simulation, bench-top testing, phantom validation, or human-subject trials.
- Provided sufficient methodological detail and quantitative performance metrics.
Exclusion criteria included:
The exclusion of articles was determined by the following criteria:
- Purely conceptual papers without implementation or evaluation.
- Studies centered exclusively on prosthetics, orthotics, or upper-limb exoskeletons.
- Reviews, editorials, and non-peer-reviewed content.
2.3. Screening and Selection Process
From the initial pool of 320 articles, duplicates and non-relevant titles were removed, resulting in 284 articles eligible for abstract screening. Two independent reviewers assessed abstracts for alignment with inclusion criteria. Discrepancies were resolved by consent. This yielded 188 full-text articles for in-depth analysis.
During full-text screening, an additional 60 papers were excluded due to insufficient technical contribution, lack of experimental validation, or focus outside the review scope (e.g., pure biomechanics or wearable sensor studies). A final cohort of 128 articles was included in the review, representing a comprehensive and diverse cross-section of recent work in lower limb exoskeleton research.
2.4. Data Extraction and Thematic Classification
For each included study, relevant data were systematically extracted into a structured matrix. Categories included:
- Application focus (e.g., gait rehabilitation, terrain adaptation, pediatric use)
- Control strategy (e.g., impedance control, machine learning, reinforcement learning)
- Hardware and actuation (e.g., passive, powered, compliant, modular systems)
- Sensing and perception (e.g., EMG, EEG, IMU, vision-based systems)
- Human-robot interaction (e.g., adaptive assistance, intent recognition)
- Evaluation method (e.g., simulation, phantom validation, human-subject testing)
- Key contributions (e.g., novel controllers, biomechanical insights, clinical findings)
This structured approach enabled both quantitative and qualitative comparative analysis across thematic domains, facilitating the identification of trends, gaps, and emerging opportunities in the field. Figure 1 shows the study selection process.
Sections 3 to 9 compare, contrast, and analyze recent human lower extremity exoskeleton research works from multiple perspectives.
3. Application Focus
Lower limb exoskeletons are developed with diverse application goals, ranging from clinical rehabilitation to terrain-adaptive mobility and occupational support. These systems are tailored to assist individuals with gait impairments, enhance locomotor function, or provide physical relief during repetitive tasks. Application focus plays a pivotal role in shaping system requirements, including control strategies, actuation complexity, and user interaction paradigms. Recent research spans domains such as post-stroke gait recovery, pediatric mobility, terrain navigation, and industrial load bearing. This section categorizes and compares exoskeleton developments based on their intended functional use cases. Figure 2 illustrates major applications: (1) Clinical Rehabilitation for elderly or injured individuals regaining mobility, (2) Pediatric Mobility support for children with motor impairments, (3) Terrain Navigation aiding users in challenging outdoor environments, and (4) Industrial Load Bearing for enhancing strength and reducing fatigue in manual labor tasks.
3.1. Clinical Rehabilitation and Gait Restoration
The majority of exoskeleton research has focused on clinical rehabilitation, particularly targeting populations with impaired motor function due to stroke, cerebral palsy, or other neuromuscular conditions. Several studies demonstrate the use of exoskeletons to support sit-to-stand transitions and overground gait rehabilitation in both healthy subjects and impaired users [11,12,13,14]. These applications typically employ adaptive control techniques to personalize assistance levels according to the user’s needs. Similarly, rehabilitation for hemiplegic and neuromuscular patients has been explored in [15,16] with a particular focus on achieving symmetric gait and improving motor coordination.
More specialized interventions, such as crouch gait correction in pediatric cerebral palsy patients, are addressed in [17], while [18] expands this focus by designing pediatric exoskeletons for community-based mobility outside clinical settings. These systems often prioritize lightweight structure, safe actuation, and adaptive gait phase tracking suited for children. In a broader clinical context, references [19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61] further contribute to real-world locomotor recovery efforts. These systems support various stages of rehabilitation-acute, sub-acute, and chronic often integrating machine learning, sensor fusion, and task-specific torque adaptation.
3.2. Cognitive-Motor Integration and Intention Recognition
An emerging area of application focuses on neural integration, where brain-machine interfaces (BMI) and biosignal decoding are used to directly map user intention to movement commands. Studies such as [62,63,64] demonstrate the integration of EEG and motor imagery signals for real-time exoskeleton control. These systems enable more seamless communication between user and machine, especially beneficial for individuals with limited voluntary control. EMG/sEMG-based motion recognition, covered in [65,66,67,68,69,70,71,72] supports a more accessible route to intention detection by leveraging residual muscular activity. These signals, often processed through deep learning or hybrid classifiers, enable recognition of user intent across various locomotion modes.
3.3. Terrain Adaptation and Environment-Aware Gait Assistance
Exoskeletons capable of adapting to real-world terrain conditions represent a significant application area aimed at extending usability beyond controlled environments. References [73,74,75,76,77,78,79,80,81,82,83] explore terrain classification and transition prediction using vision systems, IMUs, or multi-modal fusion techniques. For example, [74] employs a CNN-based system for predicting foot landing in complex terrains, while [83] proposes terrain-aware gait switching models using GRU networks and CNN classifiers. These approaches are particularly valuable for enhancing safety and autonomy during stair ascent/descent, slope walking, or uneven ground navigation. Exoskeletons such as those presented in references [84,85,86,87,88] further support this functionality through adaptive locomotion strategies focused on balance and trajectory correction in dynamic terrain.
3.4. Load-Bearing and Occupational Support
Beyond clinical applications, several exoskeletons are developed for enhancing occupational performance, particularly in load-bearing tasks. Reference [89] presents a passive mechanical design that supports users during high-load activities, such as military operations or rescue work. Industrial applications are further detailed in references [90,91,92,93,94], which evaluate static force distribution and postural support during tasks like squatting, kneeling, or lifting. These exoskeletons typically prioritize ergonomic comfort, mechanical simplicity, and reliability over precision control, making them suitable for prolonged use in constrained settings. For instance, [52] utilizes electromagnetically controlled mechanisms to provide squat support with minimal energy expenditure.
3.5. Posture Support and Self-Balancing Systems
Postural assistance and fall prevention represent another application frontier, especially for populations with reduced balance or trunk control. References [95,96,97,98,99,100,101,102,103,104,105,106,107,108,109] target balance correction, squat stability, and posture maintenance during both static and dynamic tasks. Systems like the 12-DOF exoskeleton in [33] offer full-body self-balancing capabilities through distributed actuation and kinematic modeling. Meanwhile, studies such as references [100,109] focus on maintaining upright stability during sudden perturbations by modeling body dynamics as an inverted pendulum and compensating accordingly. These systems often integrate trunk actuation and CoG tracking to stabilize the user under dynamic conditions.
3.6. Energy Efficiency and Regeneration
A niche but growing area of application involves energy-efficient exoskeletons that minimize metabolic cost or enable energy regeneration during locomotion. For example, reference [110] uses bond graph modeling to capture mechanical energy during sit-to-stand transitions, while references [111,112] demonstrate energy-saving joint designs and control policies. These strategies are particularly valuable in mobile, battery-powered exoskeletons where runtime and weight are critical concerns. Study [112] reports a 35% reduction in metabolic cost using synchronized torque assistance based on ground reaction force feedback.
3.7. Evaluation and Performance Benchmarking
Quantitative evaluation and benchmarking of exoskeleton performance are increasingly seen as essential for widespread deployment and clinical adoption. Reference [113] introduces a multi-indicator performance evaluation model that integrates gait symmetry, timing, torque, and user effort. Likewise, reference [114] focuses on stiffness modeling of the human-exoskeleton interface, essential for ensuring safe and efficient interaction. Study [115] presents an intelligent model that predicts clinical rehabilitation outcomes based on motion and physiological inputs, demonstrating the role of AI in guiding therapy. Additionally, reference [45] applies unsupervised clustering and PCA to assess biomechanical performance across various users and tasks.
4. Control Strategy of Human Lower Limb Exoskeleton Robots
Control strategy is a foundational element in the design and effectiveness of lower limb exoskeletons. It determines how the system interprets user intent, regulates actuation, and responds to internal and external dynamics. Early approaches were dominated by model-based controllers such as PID and impedance control, offering stability and simplicity but limited adaptability. Recent advances have introduced machine learning, reinforcement learning, and hybrid frameworks that allow for real-time adaptation and personalized assistance. Biosignal-driven control using EMG or EEG has also become central for intuitive human-robot coordination. Moreover, digital twin models and neural estimators are now enhancing prediction and precision in complex tasks. This section explores and classifies control approaches across the selected articles, highlighting their evolution and application-specific relevance. Figure 3 shows major approaches to exoskeleton control: (1) Model-Based Control using classical control algorithms like PID, CTC, (2) Machine Learning for data-driven decision-making and adaptability, (3) Biosignal-Driven Control leveraging EMG or EEG for intuitive user intent recognition, and (4) Digital Twin models for predictive and synchronized control based on virtual-human representations.
4.1. Model-Based and Adaptive Control Strategies
Model-based control remains a foundational approach in many exoskeleton systems. Classic examples include the use of Lyapunov-based adaptation combined with Swarm Optimization in reference [11] where the Swarm-Initialized Adaptive (SIA) controller balances responsiveness and robustness. Similarly, reference [15] applies explicit model-based fuzzy control derived through low-dimensional approximations to improve real-time performance in uncertain environments. These methods offer robust stability but often rely on accurate system modeling, which can be challenging in human-exoskeleton interactions.
Other studies have enhanced this foundation by integrating adaptive mechanisms. For example, reference [14] introduces an Adaptive Interaction Torque Assist-As-Needed (AITAAN) approach, which dynamically adjusts assistance based on user effort, while reference [116] uses Neighborhood Field Optimization (NFO) for system identification in conjunction with adaptive backstepping control. Reference [13] blends multiple layers of control-ACPG, NDO, and PPC-into a unified framework for robust trajectory tracking, highlighting the trend toward combining modular adaptive techniques.
4.2. Impedance, Compliance, and Torque Control Approaches
Impedance and compliance-based strategies are widespread due to their effectiveness in maintaining safe, intuitive interaction. Reference [65] uses a RBFNN combined with type-2 fuzzy logic to estimate impedance in uncertain settings, while reference [28] introduces a Dynamic Parameter Fuzzy Impedance Controller (DPFIC) to adapt impedance dynamically during disturbed gait. Similarly, reference [30] modulates torque through compliance-based CPGs and impedance control, aiming for natural joint-level assistance.
Reference [95] stands out for its bio-inspired compliance control using Anthropomorphic Viscoelastic Muscle Models (AVMM) and Adaptive Viscoelastic Compliance Control (AVCC), simulating muscle-like behavior for dynamic walking. This anthropomorphic approach allows the exoskeleton to better absorb and release energy during transitions like stance to swing. Moreover, reference [81] builds on this by adjusting impedance in real-time according to gait phase and intention.
4.3. Intelligent and Learning-Based Control Architectures
The integration of machine learning has dramatically expanded control capabilities. Reference [66] employs a Zeroing Neural Network (ZNN) combined with a deep CNN for robust torque estimation. Reference [117] leverages reinforcement learning with critic networks in an event-triggered impedance controller, showing how learning-based methods can reduce communication overhead while maintaining responsiveness. Similarly, reference [118] adopts a repetitive learning controller based on phase observers to handle cyclic gait disturbances.
Digital twin-enhanced learning systems are exemplified in references [27,119] where DDPG and PSO optimize trajectory tracking using synchronized virtual models. These approaches offer high accuracy and adaptability, especially in non-stationary environments. Concurrent learning also appears in references [36,59,61] offering robust tracking performance across variable tasks without needing task-specific tuning.
The use of fuzzy systems optimized via metaheuristics is also notable. For instance, reference [120] compares fuzzy-PID controllers tuned with the Dragonfly Algorithm (DFA) versus Genetic Algorithms (GA), showing DFA’s superior convergence and performance. These hybrid learning approaches balance interpretability with performance and are increasingly being integrated into real-time systems.
4.4. Terrain-Adaptive and Gait-Phase-Aware Controllers
Exoskeletons often function on varied terrain, prompting the development of terrain-adaptive control strategies. References [73,74] both use CNNs with visual and IMU inputs for terrain classification and foot landing prediction. These models allow the exoskeleton to anticipate changes in elevation or obstacle presence. References [79,83] extend this concept by using multimodal sensor fusion (IMU, camera) with temporal models (GRU, CNN) to support real-time gait adjustments during terrain transitions.
Gait-phase-specific controllers are exemplified by reference [12], which aligns variable admittance control with FFT-derived step frequency, and reference [121] uses bilateral mixing for gait guidance based on phase transitions. Reference [122] applies a Graph Convolutional Network (GCN) to classify gait events (heel strike, toe-off, etc.) with high accuracy, enabling precise assistance timing. These gait-aware systems are crucial for ensuring smooth and personalized support across walking cycles.
4.5. Event-Triggered and Energy-Efficient Controllers
Event-triggered control has seen in references [117,123], is a growing area of interest due to its capacity for reducing computational and communication loads. Reference [123] combines Sliding Mode Control (SMC) with event-triggering and a GA-BP-based EMG estimator for intention recognition, achieving responsive yet efficient control.
In parallel, controllers targeting energy efficiency are emerging. Reference [110] models mechanical energy regeneration during sit-to-stand using bond graphs, while reference [112] implements torque assistance based on CoM and GRF feedback to reduce metabolic cost by up to 35%. Reference [111] simulates energy-efficient movement in a 2-DOF knee exoskeleton with parallel springs, showcasing passive elements as a viable alternative to high-energy actuation.
4.6. Motion Prediction and User Intention Estimation
Accurate prediction of user motion and intention is vital for effective assistance. EMG and sEMG signals are used extensively in references [67,68,69,70,71,72] processed through classifiers such as autoencoders, CNNs, GATs, and U-Net+LSTM hybrids. These systems decode gait mode, stride initiation, and force exertion in real time, enhance responsiveness.
EEG-based intention detection is tackled in references [62,63,64]. Reference [62] integrates Error-Related Potentials (ErrP) to correct false gait starts in BMI-driven systems, while reference [63] uses ensemble classification with CSP features and attention layers to decode motor imagery with high accuracy. Reference [64] combines multiple EEG features with multivariate optimization for enhanced classification reliability in motor intention decoding.
4.7. Structural, Multi-Modal, and Self-Balancing Control
The structural complexity of exoskeletons is mirrored in their control strategies. Reference [98] presents a hybrid serial-parallel actuation system requiring precise kinematic modeling for self-balancing, while references [124,125] use RBFNN and GRU-PD controllers, respectively, to manage complex mechanical configurations. Self-balancing and posture stability are further explored in references [100,103,109], with controllers based on inverted pendulum models, foot placement prediction, and multi-DOF actuation.
Systems that integrate multiple control objectives are also becoming prevalent. For instance, reference [85] applies a dual closed-loop structure with TSLSTM-based sensor fusion to handle unilateral gait disturbances, while references [31,32,40] blend gait generation, mode recognition, and torque control into coherent frameworks that adapt across walking speeds and environments.
4.8. Evaluation and Biomechanical Feedback Controllers
An often overlooked but crucial aspect of control lies in how performance is evaluated and adapted over time. References [25,45,113] propose clustering, SOM, and PCA-based systems for multi-indicator evaluation of exoskeleton performance. These tools enable personalization and iterative optimization, linking biomechanics (torque, step length, joint angles) with controller performance.
Controllers such as those in references [38,41,50] integrate feedback from gait deviation models, GRF, or EMG drift to recalibrate assistance dynamically. This closed-loop performance monitoring ensures long-term effectiveness, especially in rehabilitation contexts where user state changes over time.
5. Sensing Modalities & Perception
Sensing modalities and perception systems are critical enablers of intelligent and responsive lower limb exoskeletons. They provide the data necessary for interpreting user intent, monitoring physical interaction, and adapting to environmental conditions. Modern exoskeletons leverage a wide range of sensors, including electromyography (EMG), electroencephalography (EEG), inertial measurement units (IMUs), force/torque sensors, and vision-based systems. These inputs are often fused using advanced signal processing and machine learning techniques to improve accuracy and robustness. Effective perception not only enhances safety and performance but also enables context-aware control and human-robot synergy. This section reviews the sensing strategies employed in recent exoskeleton systems and examines their integration into perception-driven control architectures. Figure 4 illustrates key sensor types used to interpret user intent and monitor system dynamics, including EMG and EEG biosignals, inertial measurement units (IMUs), force/torque sensors, vision-based perception, and surface electrodes. These modalities collectively enable accurate, adaptive, and context-aware control in human-exoskeleton interaction.
5.1. Vision and Inertial Fusion for Terrain and Motion Perception
Computer vision combined with inertial sensing is a popular approach to enhance terrain awareness and gait planning. References [73,74] integrate vision (camera-based systems) and IMU data using deep learning models like CNNs and MobileNetV2 to classify terrain types and predict foot landing zones. These systems allow proactive gait adjustment by identifying upcoming obstacles or uneven surfaces, improving safety in unstructured environments. Further advancements in terrain classification include in references [76,78,79] which utilize camera, LIDAR, and IMU fusion to robustly differentiate between stairs, ramps, and level ground under variable lighting and terrain textures.
IMUs are also widely applied for movement classification. Reference [126] combines IMU and pressure data using GMM and DTW for terrain mode recognition. Similarly, references [127,128] apply TCN and LSTM classifiers to IMU-derived gait phase data, demonstrating robustness to noise and small datasets.
5.2. EEG and Brain-Computer Interface-Based Sensing
Brain-derived signals offer a non-muscular avenue for decoding user intent. Reference [62] integrates EEG with Error-related Potential (ErrP) detection across multiple feedback modalities (tactile, visual, combined), allowing for correction of false intentions in asynchronous BMI systems. Reference [63] applies deep and shallow neural network to classify Motor Imagery (MI), enabling intuitive control of gait functions. Additionally, reference [64] explores multifeatured EEG fusion (e.g., CFC, CSP, PSD) to enhance classification robustness, showing high potential for locked-in or high-impairment users.
5.3. EMG, MMG, and Hybrid Biosignal Sensing
EMG remains a dominant modality for estimating user intent, muscular effort, and control parameters. Studies [14,65,66,116] use EMG for torque estimation via neural networks, CNNs, or NDO frameworks. Similarly, reference [23] utilizes a GA-BP neural network to predict motion intention from EMG. In references [70,71,72,129], EMG signals are processed using advanced deep learning architectures-such as GAT, CNN, U-Net, and LSTM-for precise phase detection and gait classification.
Hybrid biosignal approaches compare EMG and MMG efficacy. Reference [69] applies machine learning regressors to evaluate both modalities for joint torque prediction, concluding EMG has a slight edge but MMG remains viable. Studies like references [46,48,50,52,60,104] combine EMG with foot pressure sensors to improve reliability of motion prediction and gait segmentation under varied walking conditions.
5.4. Ground Reaction Force (GRF), Pressure, and Force Sensor Integration
GRF and pressure sensors contribute to ground interaction estimation and postural stability. [86] uses CoM and GRF data for torque assistance in hip and ankle exoskeletons, optimizing energy expenditure. References [38,42,81] fuse EMG with GRF and mechanical encoders to track gait phase and detect limb-loading asymmetries, improving rehab personalization. Reference [37] incorporates 6-axis force/torque sensors to supply feedback for reinforcement learning-based hip torque control, enabling fine-tuned assistance in real time. Reference [130] stands out by embedding parasitic force sensors in the shank, which correct misalignment between human and exoskeleton.
5.5. Multimodal Sensor Fusion and Deep Learning Enhancements
Sensor fusion combined with deep learning is critical in capturing complex locomotor dynamics. References [21,23] use FFT-based methods and sensor fusion for trajectory generation and intent estimation, improving responsiveness and comfort. References [49,51,55] apply Kalman filters and neural estimation for state prediction, reducing error in complex motions like stair climbing or fall recovery.
Multimodal fusion is further exemplified in reference [75], where foot pressure, joint angle, and terrain features are used to adapt an A-CPG model in real-time. Reference [119] enhances control accuracy through feedback from a virtual twin, synchronized with real-world sensor data. Reference [85] employs multi-sensor fusion and dual closed-loop control using temporal LSTM-based models to ensure stable gait in asymmetric walking. Reference [25] introduces an evaluation framework using sensor-derived gait metrics like speed, symmetry, and motion fluency to assess human-exoskeleton cooperation across tasks.
5.6. Phantom Systems and Simulation Validation
For exoskeleton evaluation, some studies use biomechanical phantoms or simulated models. References [87,131] deploy 3D-printed legs embedded with force plates and motion tracking to simulate joint torques and validate controller performance. These setups enable safe, repeatable testing of force transfer, torque limits, and interface behavior. Reference [49] uses a digital twin to estimate the impact of model uncertainty on trajectory tracking, allowing for control refinement in simulation before deployment.
5.7. Pediatric and Pathological Gait Monitoring
Customized sensing approaches are required for children with irregular gait patterns. Reference [18] uses LSTM-based gait phase estimation to handle irregularities in pediatric gait. Reference [108] monitors gait timing, angular offset, and foot orientation in children with crouch gait, using a multi-point control exosuit. These specialized sensors and models are crucial for ensuring safety and effectiveness in non-standard user populations.
5.8. Gait Performance and Classification Systems
Some research focuses on categorizing gait types or evaluating therapy outcomes. Reference [115] integrates subject physiological data, joint torque, and gait kinematics to predict rehabilitation success using machine learning. References [44,45,82] use wearable inertial sensors to classify motion types (walking, turning) and assign biomechanical performance scores through clustering and PCA. These evaluation tools provide a foundation for evidence-based therapy progression and objective performance tracking.
5.9. IMU and Terrain-Linked Perception
IMUs are often used to assess gait symmetry, torso sway, and segment timing. Reference [97] deploys them during balance beam walking to evaluate postural control, while references [53,83,100] track foot placement and elevation to adapt walking patterns across stairs or inclines. These sensors enable context-aware control and those are especially relevant for real-world deployment in non-clinical environments.
Overall, the sensing strategies vary in complexity and application specificity. Vision and IMU fusion ([73,74,79]) is ideal for terrain awareness, while EMG/EEG models ([62,64,70]) offer high-resolution intent prediction. GRF and torque sensors ([37,112,130]) excel in interaction torque and postural feedback. Deep learning frameworks enable sensor fusion models to scale across environments and user conditions. The choice of modality is closely tied to system goals-rehabilitation, terrain navigation, pediatric use, or industrial support-and continues to evolve toward multi-modal, adaptive solutions.
6. Hardware Design & Actuation
Hardware design and actuation form the structural and functional backbone of lower limb exoskeleton systems. These elements define how mechanical assistance is delivered, how well the system aligns with human biomechanics, and the overall comfort, weight, and usability of the device. Designs vary widely, from fully actuated multi-degree-of-freedom systems to lightweight passive or semi-passive configurations using springs, dampers, or compliant joints. Advances in actuation technologies, including variable stiffness actuators, hydraulic drives, and energy-regenerative mechanisms have significantly improved performance, efficiency, and safety. Furthermore, modular and pediatric-specific designs are expanding the accessibility of exoskeletons across different populations and use cases.
This section examines the evolution of hardware and actuation strategies in modern exoskeleton development. Figure 5 illustrates hardware design and actuation strategies in lower limb exoskeletons. The illustration categorizes four key hardware configurations: (1) Fully Actuated systems offering high control precision, (2) Passive designs utilizing mechanical elements like springs, (3) Variable Stiffness systems with hydraulic drives for adaptable force output, and (4) Pediatric-specific designs tailored for children, focusing on lightweight and ergonomic structure. These variations address different user needs, biomechanical compatibility, and performance requirements.
6.1. Standard Multi-DOF Powered Systems
Several foundational studies rely on traditional powered exoskeletons with multiple degrees of freedom (DOF), which serve as reliable testbeds for control and gait assistance development. Systems in references [11,12,13,14] employ standard actuators with torque or position control across hip and knee joints, supporting tasks such as sit-to-stand transitions and overground gait training. These designs offer high controllability and adaptability but are often limited by weight, complexity, and power requirements.
6.2. Passive and Mechanically Intelligent Designs
A trend toward passive and mechanically efficient systems is evident in references [89,90,91,92,93,110]. The exoskeleton in reference [89] features a reconfigurable U-C-R joint with passive gravity compensation, supporting joint alignment and load transfer. Industrial applications are addressed in references [90,92] which use chair-like passive support to reduce muscular effort during static tasks. Reference [110] introduces a wire-rope system with energy storage springs to regenerate mechanical energy during sit-to-stand transitions, promoting energy efficiency without active motors. Additionally, reference [93] demonstrates an electromagnetically controlled passive squat support system for ergonomic stability in industrial tasks.
6.3. Compliant and Bio-Inspired Actuation
Compliance-focused and biologically inspired hardware improves comfort and energy transfer. Reference [95] stands out with its Anthropomorphic Viscoelastic Muscle Model (AVMM), which mimics muscular elasticity and viscosity for dynamic walking. Modular bio-inspired solutions are further explored in references [35,43,77,80,112] where passive joints, biarticular springs, and Central Pattern Generator (CPG)-driven actuators produce human-like movement. These mechanisms enable smoother transitions between gait phases and improve energy efficiency, especially when integrated with impedance control strategies like in reference [30].
6.4. Pediatric and Lightweight Adaptations
Hardware tailored for pediatric or low-mobility populations is evident in the references [17,18,33,108]. These designs emphasize reduced size, weight, and torque saturation control. For instance, reference [18] presents a 1.78 kg unilateral exoskeleton for pediatric use, while reference [108] employs a soft-rigid compliant suit with multi-point actuation for crouch gait correction in children with cerebral palsy. Reference [33] adds passive ankle and hip modules for low-impact rehabilitation in young users.
6.5. Modular and Terrain-Adaptive Platforms
Modular systems designed for multi-environment operation are presented in references [31,121,125,132]. Reference [121] uses bilateral gait control with trajectory mixing, while reference [132] tests the Exoped® with modular actuators on stairs, level ground, and obstacle-rich environments. The design in reference [125] features variable trajectory modules to adapt to asymmetrical walking, and reference [31] introduces a physical testbed with an adaptive admittance controller to simulate terrain changes. These systems improve platform generalizability and real-world relevance.
6.6. High-Fidelity Sensing and Phantom-Based Hardware
Experimental hardware and test phantoms are used in references [24,87,130,131] to study interface dynamics and torque validation. Reference [17] integrates parasitic force sensors into a 2-DOF knee system to correct joint misalignment in real time. References [87,131] employ 3D-printed ballistic gel limbs embedded with 6-axis sensors for testing compliance and stiffness under realistic conditions. Reference [24] presents a virtual and physical model of a human-exoskeleton-walker system, validating coordinated movement and CoM tracking via simulation.
6.7. Digital Twin and AI-Augmented Hardware
Digital twin integration is increasingly common in references [27,47,49,104,119], where real-time virtual counterparts optimize motor control and system identification. References [24,63] utilize direct-drive actuators whose trajectories are tuned via virtual feedback, while references [47,104] use actor-critic models to improve real-time torque allocation. Reference [49] further quantifies the impact of model uncertainty in these digital ecosystems, offering insights into reliability and predictability in real deployments.
6.8. Torque-Sensing and Deep Learning-Enhanced Designs
Systems with embedded torque sensing and stiffness control-seen in references [36,37,41] support adaptive behavior and predictive assistance. For example, reference [37] uses 6-axis force-torque sensors for feedback in a DDPG-controlled hip actuator, while [36] uses concurrent learning for robust adaptation to joint variability. These systems demonstrate how integrating deep learning with mechanical sensing enhances both responsiveness and robustness.
6.9. Embedded Sensor Platforms for Gait Evaluation
Gait analysis and feedback-rich systems are featured in references [38,40,45], which incorporate wearable sensors and motion tracking for performance monitoring. These platforms enable precise detection of gait phases and can generate real-time biomechanical feedback for clinical or sports applications. Similarly, references [79,81,82] embed IMU, EMG, and vision-based sensing to support terrain classification and motion segmentation, bridging perception and control.
6.10. Lightweight, Foldable, and Wearable Systems
Several systems prioritize portability and user compliance. References [94,102,105,107] focus on compact, high-torque exoskeletons for daily or home use. Reference [102] achieves 30 Nm output at under 0.5 kg mass, ideal for ankle actuation, while reference [94] offers passive support with adjustable frames to reduce muscle activation during prolonged use. Reference [107] presents a foldable mobility-assist exoskeleton suitable for community integration, underscoring a shift toward practical and socially integrated wearables.
6.11. Self-Balancing and Whole-Body Support Systems
Balancing systems with multiple DOFs are explored in references [98,100,103,109]. Reference [98] proposes a 12-DOF exoskeleton using parallel and serial mechanisms to support upright posture. References [100,116] integrate foot and trunk actuation to prevent falls, while reference [109] focuses on autonomous balance control through distributed sensing and self-corrective motion generation. These designs are particularly suited for elderly users or those recovering from neurological injury.
6.12. Trunk-Lower Limb Coordination Systems
Reference [101] presents a unique hardware innovation by integrating trunk and lower-limb actuation to stabilize users during complex motion. This holistic approach considers whole-body coordination, particularly important for dynamic balance during walking or turning, where the center of mass must be closely regulated.
Overall, the landscape of exoskeleton hardware reflects a shift from monolithic, powered systems ([11,13,14]) toward distributed, lightweight, and intelligent platforms tailored to specific tasks or populations. Whether through passive support ([89,92]), bio-inspired compliance [35,95]), digital twin augmentation ([27,119]), or pediatric design ([18,108]), innovations are converging on systems that are more comfortable, responsive, and usable in diverse contexts.
7. Human-Robot Interaction (HRI) Approach
Human-Robot Interaction (HRI) plays a central role in the effectiveness, safety, and user acceptance of lower limb exoskeletons. It governs how the system interprets user intention, adapts to individual capabilities, and responds to biomechanical and environmental changes. Modern HRI approaches have moved beyond passive compliance to incorporate biosignal-driven control, adaptive impedance tuning, and real-time cooperative intent modeling. These strategies enable more intuitive, responsive, and personalized assistance, especially important in rehabilitation and mobility-impaired populations. Furthermore, human-in-the-loop learning and user feedback integration are enhancing the transparency and comfort of interaction. This section explores the various HRI methodologies employed in contemporary exoskeletons and their impact on system usability and adaptability. Figure 6 highlights four critical HRI approaches: (1) Intention Recognition for interpreting user goals, (2) Adaptive Impedance for dynamically adjusting support based on movement and feedback, and (3) pediatric interface (4) impaired user interface.
7.1. Gait-Adaptive and Torque-Based Interaction
Several exoskeletons employ gait-adaptive strategies that adjust assistance levels in real-time. Studies such as references [12,13,14] implement admittance or torque-based control mechanisms that modulate support in response to step frequency, trajectory error, or user effort. These systems are typically used in gait rehabilitation and aim to strike a balance between robotic assistance and user autonomy, encouraging active user participation and preventing over-reliance.
7.2. Biosignal-Driven Intention Recognition
User intent detection through biosignals is a major pillar of intuitive HRI. Systems in references [9,62,65] decode intention using EMG or EEG, triggering actuation or modulating assistance accordingly. For instance, reference [62] combines EEG with error-related potentials (ErrP) to reduce false activations, while [65,66] employ fuzzy logic or CNNs to process EMG for joint torque estimation. Similar intent-based HRI is extended in references [33,64,70,71,72,129], where deep learning models process biosignals in real time to enable low-latency, user-driven responses, including for users with irregular gait patterns or low signal quality.
7.3. Fault-Tolerant and Safe Interaction Control
Ensuring safety and robustness is vital in clinical applications. Controllers in references [16,117,118] are designed for robust tracking even under faults or uncertainties. These use adaptive neural models or reinforcement learning with stability guarantees (e.g., Lyapunov-based design) to maintain performance without endangering the user. Similarly, reference [23] combines sliding mode control (SMC) with EMG intent estimation for asymptotic convergence under bounded disturbance.
7.4. Bio-Inspired Compliance and Physical Alignment
Physical human-robot compatibility is critical for long-term comfort. References [95,130] introduce bio-inspired solutions, viscoelastic muscle modeling and parasitic force sensors to improve joint alignment and compliance. Systems in references [35,77,80] further improve this by integrating passive or compliant actuators to reduce shear forces and encourage naturalistic movement. These approaches enhance safety and reduce user fatigue, especially during long sessions.
7.5. Personalized Assistance for Special Populations
Pediatric and gait-irregular populations require specialized HRI. References [18,63] employ EEG and LSTM-based models for intention recognition in children and irregular gait contexts. References [60,108] develop lightweight, soft-rigid exosuits tailored for pediatric users, emphasizing safety, fit, and adaptive control. These designs accommodate size, torque constraints, and variability in muscle control, essential for effective therapy in children or users with spasticity.
7.6. Evaluation-Based and Performance-Aware HRI
Some systems focus on HRI evaluation and user cooperation measurement. References [24,25,28,30,113,133] propose multi-indicator or biomechanical assessment tools to monitor and adapt assistance strategies. These range from CoM-targeted coordination in multi-agent systems [60] to energy-based or performance-indexed torque modulation reference [133]. Similarly, reference [45] uses unsupervised learning to score biomechanical effectiveness based on user profiles and gait variability.
7.7. Human-in-the-Loop and Impedance Control Approaches
Human-in-the-loop controllers actively adapt to user inputs. References [84,85] adjust impedance in real time using user feedback, while references [46,50,54,59,61] refine admittance or impedance parameters according to physiological responses and joint behavior. These systems enhance transparency and responsiveness and are particularly effective during co-adaptive learning or rehabilitation training where patient ability evolves.
7.8. Terrain-Adaptive and Environment-Aware Support
Environment-driven adaptation is tackled in references [31,32,75] where terrain feedback is used to adjust motion plans or control parameters. Learning-based controllers in references [37,78] respond to environmental conditions using reinforcement learning or uncertainty-aware models, enabling the exoskeleton to behave predictively in complex or unstructured terrains.
7.9. Symmetry and Balance-Oriented HRI
Gait symmetry and postural balance are addressed in systems such as references [57,101,103,125]. Reference [65] combines data-driven and analytical models for symmetric walking in impaired users, while references [109,116] integrate trunk motion with lower-limb actuation to enhance global stability. Reference [109] adds a six-DOF self-balancing platform that reacts to postural changes and mitigates falls in uncooperative or unexpected scenarios.
7.10. Passive Assistance for Ergonomic Support
Ergonomic passive exoskeletons like those in references [91,92] provide structural support to minimize muscular effort without relying on sensors or actuation. These are ideal for occupational tasks like lifting or squatting. Though simple, their mechanical configuration requires careful HRI design to prevent misalignment and ensure comfort over long durations.
7.11. Adaptive Support Based on Capability
Torque and stiffness adaptive controllers such as those in references [34,36,38] adjust assistance based on real-time feedback of user capability, especially useful in progressive rehabilitation or post-stroke therapy. These controllers promote engagement by reducing assistance as user performance improves.
7.12. Trajectory Learning and Predictive HRI
HRI informed by user-specific motion profiles is explored in references [40,41,45]. These systems learn from previous movements to predict desired joint trajectories or allocate assistance probabilistically. Reinforcement learning and encoder-decoder architectures used in references [47,52,104] are also fall into this category, where systems continuously refine control policies to match user intent over time.
Across the spectrum of designs, HRI strategies have evolved from fixed torque or position control to real-time, adaptive, and intention-aware systems. Whether through biosignal decoding ([62,66,70]), terrain and environmental feedback ([75,79]), or co-adaptive impedance tuning ([50,59]), the common thread is personalization and safety. The field continues to move toward seamless interaction, where exoskeletons interpret, predict, and respond to human needs with minimal latency and maximum comfort.
8. Evaluation Methods & Subjects
Evaluation methods and subject testing are essential components in validating the performance, safety, and real-world applicability of lower limb exoskeletons. These assessments help to determine how well a system supports functional tasks, adapts to different users, and meets clinical or assistive objectives. Evaluation approaches range from simulation and phantom-based testing to comprehensive trials involving healthy, impaired, pediatric, and elderly subjects. Metrics often include joint tracking accuracy, gait symmetry, energy efficiency, user effort, and clinical outcome scores. As exoskeleton technologies become more sophisticated and user-specific, rigorous and standardized evaluation becomes increasingly important. This section reviews the methodologies and populations used to assess the effectiveness of modern exoskeleton systems. Figure 7 figure illustrates key strategies used to assess the performance and real-world applicability of exoskeletons, including simulation-based analysis, testing with robotic phantoms, healthy participant trials, and evaluations involving clinical populations.
8.1. Simulations and Healthy Subject Testing
A large number of studies begin with simulations or controlled trials involving healthy participants to validate the mechanical integrity and control responsiveness of exoskeletons. References [11,12,13,14] valuate sit-to-stand and gait functionalities through lab-based simulations and healthy subject tests, providing foundational validation. Similarly, references [65,66,116] assess controller performance and torque estimation accuracy using simulation platforms before transferring to hardware testing. Studies like reference [132] extend this by testing the Exoped® in three real-world walking conditions level ground, stairs, and obstacle negotiation demonstrating the importance of environmental diversity even in healthy trials.
8.2. Pathological and Comparative Clinical Evaluations
Moving toward clinical applicability, references like reference [15] conduct comparative assessments between healthy and hemiplegic patients to understand therapeutic impacts. Others such as [34,36,38,39,40] directly involve post-stroke or impaired users in rehabilitation settings, evaluating outcomes like gait symmetry and torque assistance accuracy. Pediatric-focused studies like references [18,33] assess gait segmentation and assistive effectiveness in children with cerebral palsy. Notably, reference [108] conducts therapy validation with multi-point gait feedback tailored to pediatric crouch gait.
8.3. Terrain-Specific and Outdoor Evaluations
Some evaluations focus on performance in natural environments. References [73,75] validate terrain classification and adaptive gait using cross-validation and four-subject terrain trials involving gravel, slopes, and steps. References [76,78,79] emphasize outdoor terrain-adaptiveness using camera and IMU data, tested under real-world conditions. Similarly, reference [97] assesses postural sway and stride performance on a balance beam with and without exoskeletal assistance, while reference [90] tests static force transfer across multiple heights and directions in a chair-type exoskeleton using 20 subjects.
8.4. Biosignal Validation and Dataset-Based Evaluations
Several studies validate signal-processing models using biosignal datasets collected from multiple subjects. EMG/sEMG-focused studies presented in references [19,67,68,69,70,126] collect multi-subject datasets for classifier training and validation. Reference [66] achieves 98.9% accuracy with a Graph Attention Network (GAT) model for locomotion recognition. EEG-based trials such as references [62,63] use 6-8 subjects to characterize error-related potentials (ErrP) or motor imagery, while reference [64] reports about 87% accuracy through multi-feature EEG fusion. These experiments emphasize classifier robustness and inter-subject generalizability.
8.5. Biomechanical Evaluation and Phantom-Based Testing
References like references [45,87,111,113,114] delve into biomechanical and interface performance using phantoms, marker tracking, and clustering techniques. Reference [114] estimates soft tissue stiffness in six subjects using fluoroscopy and motion capture, and reference [87] uses a ballistic gel phantom to validate torque transmission. Meanwhile, reference [45] applies PCA and clustering to biomechanical data across tasks to produce subject-specific performance scores.
8.6. Validation of Control Accuracy and Tracking
A number of studies use precise metrics to evaluate trajectory tracking, torque output, and gait phase classification. For example, reference [125] reports joint RMS errors <3.3° and torque RMS <3.7 Nm. Reference [122] evaluates a GCN gait phase classifier in level and incline environments, achieving 97.43% accuracy. Studies like references [71,72,129] assess CNN and LSTM-based phase classifiers using noisy biosignals, with accuracies exceeding 90%. Similarly, reference [27] uses digital twin comparison and confirms angular tracking errors under 0.05 rad, while references [49,55] explore convergence error in simulation versus experimental setups.
8.7. Fall Recovery, Balance, and Stability Evaluation
Fall prevention and balance are evaluated under constrained or perturbation-based conditions. Reference [134] tests stair-climbing and trip-avoidance in experimental setups, while references [57,100,102,107] validate devices across inclines and postural changes. Reference [109] uses workspace coverage and stability modeling to validate self-balancing design. These tests are crucial for assessing robustness and safety in dynamic or unexpected conditions.
8.8. Multimodal Functional and Cooperative Testing
Functional assessments using standardized tasks such as Timed Up and Go (TUG), squats, and 6-Minute Walk Tests (6MWT) are used in references [56,61,105,106]. These involve rehabilitation patients and evaluate real-world task success. Reference [25] uses a weighted multi-indicator framework across five tasks to quantify human-robot cooperation. Studies like references [24,31,119] assess coordinated motion through trajectory tracking or virtual modeling.
8.9. Simulation-Only or Early-Stage Studies
Some references rely purely on simulations to test early-stage concepts. References [29,30,32,86,88,110,135] simulate gait control models, stair negotiation, hydraulic responses, and disturbance rejection without human subjects. These simulations are instrumental for identifying theoretical weaknesses and control boundaries before physical trials.
The choice of evaluation method varies with system maturity and application context. Early-stage systems typically use simulation ([30,110]), while mature platforms progress to healthy trials ([11,13,136]) and eventually to clinical or pathological validation ([15,34,108]). Terrain adaptability ([75,79]), signal classifier robustness ([64,70]), and co-adaptive learning ([25,61]) also guide evaluation frameworks. Overall, the literature demonstrates a clear progression from simulation to real-world validation, increasingly leveraging subject-specific and task-diverse methodologies.
9. Key Innovations/Contributions
Key innovations and contributions in lower limb exoskeleton research reflect the field’s rapid progression toward more intelligent, adaptable, and user-centric systems. These advancements span multiple domains, including control algorithms, mechanical design, sensing integration, and user interaction strategies. Innovations such as reinforcement learning-based controllers, bio-inspired compliant actuation, and multimodal intent recognition have significantly improved system performance, safety, and usability. Additionally, novel evaluation frameworks and predictive clinical outcome models are expanding the role of exoskeletons in personalized rehabilitation. This section highlights the most impactful technical and conceptual breakthroughs across recent studies, illustrating how they collectively shape the future of wearable robotic mobility.
9.1. Breakthroughs in Control Architectures and Learning-Based Adaptation
Many references mark major milestones in adaptive and learning-based control. For instance, reference [11] pioneered the use of Swarm-Based Adaptive Systems (SBAS) with Lyapunov control in lower-limb exoskeletons, enhancing robustness and real-time adaptability. Reference [15] innovatively applied the Lagrange mean theorem to linearize nonlinear dynamics within a fuzzy control framework, reducing computational load. In reference [12], FFT-enabled variable admittance control allowed real-time gait adaptation to user cadence. Learning-based breakthroughs were further advanced by reference [117], which converted impedance control into a reinforcement learning problem via critic networks, and reference [118] introduced a repetitive learning framework for enhanced disturbance rejection.
Digital twin technology became a control game-changer in references [27,119], where high-fidelity simulations and DDPG optimizers enabled sub 0.05 rad error in joint tracking. Complementary to these, concurrent learning controllers in references [36,61] allowed for real-time adaptation without needing extensive pre-training, paving the way for more generalizable assistance.
9.2. Terrain Awareness, Gait Phase Prediction, and Environment Adaptation
Terrain-aware prediction models represent another wave of innovation. References [73,74] leveraged CNNs for terrain and foot landing prediction, achieving 97.4% and <6% location deviation, respectively. Reference [75] used adaptive central pattern generators (A-CPG) to react to real-time terrain feedback, enabling robust locomotion across surfaces. Gait phase estimation saw advances through deep learning models such as the GCN in reference [122], which outperformed LSTM and CNN in phase classification while requiring fewer labeled samples. Similar improvements in gait segmentation and classification appeared in references [70,72,127], with accuracy rates consistently exceeding 90%.
9.3. Robust and Fault-Tolerant Control Mechanisms
Fault-tolerance and safety-critical control are essential for clinical and assistive applications. In reference [16], adaptive neural fault-tolerant control ensured high-performance tracking under actuator faults. Reference [130] reduced shear-induced skin misalignment through parasitic force modeling, while reference [123] introduced event-triggered sliding mode control (SMC) with EMG intention decoding to optimize efficiency. In terms of robustness, references [135,137] offered hybrid SMC and extended state observer (ESO) methods for smooth, chatter-free torque control. Reference [55] contributed an improved torque observer that boosted fall recovery prediction accuracy by 15-20%.
9.4. Passive and Energy-Efficient Mechanical Innovations
Hardware innovation focused heavily on passive and energy-saving designs. Reference [89] introduced a U-C-R joint configuration with passive gravity compensation, achieving 87.8% load transfer during stance. Reference [110] applied bond graph modeling for regenerative energy capture in sit-to-stand tasks, while reference [111] demonstrated 12.9% energy savings with a parallel spring-based model. Reference [77] enhanced hip-knee energy coupling through passive biarticular spring-dampers. Similarly, reference [91] 's soft-rigid hybrid exosuit supported 88% of hip load and lowered metabolic cost by about 13%.
9.5. Pediatric, Pathology-Aware, and Gait-Impaired Innovations
Systems tailored for specific populations introduced thoughtful design constraints. Reference [17] addressed crouch gait rehabilitation in children using a robust controller resilient to spasticity. Reference [108] provided precise 95.4% gait timing synchronization in a pediatric exosuit with multi-point sensing. Reference [18] developed a lightweight LSTM-based gait estimator that achieved 97% torque tracking despite irregular gait profiles in children. In clinical prediction, reference [115] achieved >90% accuracy in forecasting rehabilitation outcomes using multi-modal sensor data and machine learning.
9.6. Human-Robot Cooperation and Biomechanical Evaluation
Multi-indicator evaluation and biomechanical modeling contributed significantly to HRI understanding. Reference [113] introduced a self-organizing map (SOM) framework to assess gait quality beyond single-metric evaluation. Reference [25] developed a universal evaluation index incorporating speed, symmetry, and torque. Reference [45] generated biomechanical performance scores through PCA and clustering, offering a scalable benchmarking method. Phantom-based contributions are discussed in references [87,131] helped validate force transmission models under realistic tissue compliance.
9.7. Reinforcement Learning, HRI Modeling, and Co-Adaptive Interfaces
HRI innovation saw a fusion of biosignal-driven control and intelligent learning. Reference [62] integrated error-related EEG potentials with BMI to correct 72.6% of false gait starts. Reference [63] combined deep and shallow neural layers to improve motor imagery decoding by 4%. Reference [64] used multi-feature EEG fusion to enhance classification by 4-6%. Meanwhile, references [37,47] used actor-critic and DDPG models, respectively, to achieve dynamic torque modulation in collaborative gait tasks.
Human-in-the-loop adaptations were exemplified by reference [84] which introduced a barrier-energy controller for intention-aware impedance tuning. Reference [50] presented the Personalized Assistance Estimator (PAE) to adjust control effort based on EMG drift. For balance-focused HRI, references [100,101] modeled foot placement and trunk-limb coordination to improve postural stability, achieving over 22% improvement in fall recovery.
9.8. Gait Pattern Generation, Symmetry, and Predictive Modeling
Gait generation systems increasingly leverage modular, predictive frameworks. Reference [132] proposed a multi-block trajectory generator using CoM, CoP, and swing path for real-world transitions. References [32,41] introduced learning-based generators capable of adjusting to varying speeds and user trajectories, while reference [125] used GRU + PD models for symmetry correction. Reference [40] implemented probabilistic assist-as-needed allocation, and reference [41] improved coordination with RNN-predicted joint trajectories.
9.9. Classification and Segmentation Accuracy
Innovations in motion classification and segmentation bolstered exoskeleton responsiveness. Reference [67] 's EMG classifier combined autoencoders and TCNs to surpass 99% accuracy. Reference [68]’s multi-layer TCN was robust to signal degradation down to 10dB SNR. Reference [82]’s spatial-temporal GCN distinguished walking modes (turning, stepping) with high reliability, and reference [44] achieved >92% F1 score for clinical gait categorization.
The references reveal a dynamic interplay of algorithmic, mechanical, and application-specific innovations. Control methods evolved from model-based adaptation reference [11,15] to co-adaptive and learning-driven systems ([37,117,119]). Sensing innovations-from CNN-based terrain prediction [73,79] to GCN-based gait phase classification. Reference [122] -redefine real-time responsiveness. Pediatric and post-stroke personalization ([17,18,108]) and biomechanical benchmarking ([45,113]) mark progress toward truly user-centered exoskeletons. These contributions collectively advance the field toward more intelligent, intuitive, and inclusive assistive systems.
10. Future Research Recommendations
As the field of lower limb exoskeletons continues to expand in both technological scope and real-world relevance, several critical research directions are emerging. These directions are shaped by persistent limitations, interdisciplinary gaps, and the evolving needs of diverse user populations. Future work must not only refine the components of exoskeleton systems control, sensing, hardware but also ensure cohesive integration that supports safe, intuitive, and effective user experiences. The following recommendations outline strategic priorities for the next generation of research in this domain.
10.1. Development of Standardized Evaluation Protocols and Benchmarking Tools
A major limitation in current exoskeleton research is the lack of standardized evaluation metrics and protocols across studies. Variability in testing methods, subject groups, and performance indicators impedes meaningful comparison and replication. Future research should focus on establishing community-adopted benchmarking frameworks that incorporate biomechanical, physiological, and usability metrics. Tools such as open-source datasets, task-specific protocols (e.g., sit-to-stand, stair negotiation), and clinically validated scoring systems (e.g., FMA-LE, 6MWT) can facilitate cross-platform assessment and accelerate clinical translation.
10.2. Conducting Long-Term, Real-World Usability and Efficacy Studies
While many studies demonstrate promising results in controlled laboratory environments, there remains a significant gap in controlled environment evaluation and real-world evaluation. Future research should prioritize extended-duration trials in home, community, and outdoor settings to assess device reliability, user satisfaction, and functional independence. These studies should include a variety of target populations such as stroke survivors, elderly users, or children with cerebral palsy and track outcomes like mobility progression, adherence, and psychosocial impact over time.
10.3. Advancing Environmental Perception and Predictive Control
Real-world deployment demands systems that can perceive and adapt to unstructured environments in real time. Future exoskeletons should integrate advanced perception systems such as stereo vision, depth sensing, LIDAR, and semantic segmentation fused with inertial and pressure data. Research should focus on predictive control algorithms capable of anticipating changes in terrain, user state, or intended movement, thereby improving safety and responsiveness. Learning-based environment modeling and preemptive gait planning will be especially valuable in dynamic settings like urban walking or uneven terrain.
10.4. Improving the Reliability and Intuitiveness of User Intent Recognition
User intent detection remains one of the most critical yet challenging aspects of exoskeleton control. Current approaches rely heavily on biosignals such as EMG and EEG, which are often noisy, user-dependent, and require extensive calibration. Future studies should explore hybrid intent recognition frameworks that combine physiological signals with behavioral cues, motion data, and adaptive learning algorithms. The goal is to develop robust, low-latency systems that generalize across users and tasks without sacrificing precision or comfort.
10.5. Developing Robust and Efficient Learning-Based Personalization Frameworks
Personalization is essential for maximizing exoskeleton efficacy, particularly in rehabilitation. However, achieving this in a scalable and data-efficient manner remains a key research challenge. Future work should investigate reinforcement learning, meta-learning, and co-adaptive systems that can tailor control policies to individual users with minimal supervision. Transfer learning across similar users or tasks may also accelerate adaptation in clinical and at-home settings. Additionally, the integration of digital twins can facilitate virtual pre-training and continuous improvement of personalized assistance strategies.
10.6. Investigating Human-Robot Co-Adaptation and Long-Term Interaction Dynamics
The future of exoskeletons lies in co-adaptive systems that evolve with the user over time. This requires a deeper understanding of how humans respond physically and behaviorally to robotic assistance. Future research should incorporate longitudinal interaction models, including motor learning, user feedback, and neuroplasticity metrics. By studying co-adaptation dynamics, developers can design exoskeletons that not only assist but also rehabilitate through responsive and incremental challenges.
10.7. Exploring Synergies in Hybrid Systems and Multimodal Assistance
Combining multiple assistive technologies such as exosuits, walkers, and smart insoles offers promising avenues for enhanced functionality. Future systems could dynamically allocate support based on context, effort, and task complexity, providing hybrid mechanical and sensory augmentation. Research should explore how to coordinate and optimize these multimodal systems for seamless cooperation and redundancy, especially in populations with complex impairments.
10.8. Enhancing Trust, Transparency, and Safety Through Explainable AI
As AI-driven control strategies become increasingly prevalent, ensuring transparency and user trust is paramount. Future research should integrate explainable AI (XAI) into exoskeleton decision-making pipelines to make assistance strategies interpretable to clinicians, users, and caregivers. This will be especially important for safety-critical applications and for increasing user confidence in autonomous adaptations.
10.9. Deepening Focus on Specific User Populations and Contexts
Finally, future studies should aim for more user-centered design. This includes developing exoskeletons that address the specific needs of underrepresented populations, such as children, individuals with progressive neurodegenerative diseases, or those with asymmetric impairments. Cultural, ergonomic, and lifestyle factors should also be considered to improve device adoption and accessibility globally.
11. Conclusion
The rapid evolution of lower limb exoskeleton technologies over the past decade reflects the convergence of robotics, biomechanics, control engineering, and human-centered design. This review has analyzed 128 studies spanning a broad range of applications, including clinical rehabilitation, terrain-adaptive mobility, pediatric support, industrial load assistance, and daily living augmentation. The findings reveal a rich and growing landscape of innovation, where exoskeletons are becoming increasingly intelligent, modular, personalized, and context aware.
A key takeaway is the significant diversification in application focus. Exoskeletons are no longer limited to rigid, clinical environments but are now being developed for use in natural terrain, home-based therapy, and dynamic occupational settings. Systems have been tailored for specific populations, such as post-stroke patients, children with cerebral palsy, or elderly users demonstrating the growing emphasis on inclusive and personalized assistance.
Control strategies have progressed from simple impedance and PID controllers to advanced adaptive frameworks incorporating fuzzy logic, reinforcement learning, and digital twin optimization. These advances enable more natural and effective human-robot interaction by responding to real-time changes in gait dynamics, user effort, and environmental inputs. Multi-layer control architectures, intent recognition models, and co-adaptive algorithms have made exoskeletons more flexible, safe, and efficient.
Similarly, the development of hardware has shifted toward lightweight, compliant, and energy-efficient designs. From powered multi-DOF frames to passive and soft exosuits, systems now prioritize ergonomic integration, portability, and biomechanical alignment. Modular actuation, variable stiffness actuators, and passive spring-damper structures allow for greater mechanical transparency and user comfort.
Sensing modalities and perception systems are enabling exoskeletons to become more responsive and intuitive. The integration of EMG, EEG, IMUs, vision, and force sensors often processed using deep learning techniques has improved accuracy in gait phase detection, terrain classification, and user intent estimation. These multimodal systems support predictive control and safer operation in complex, unstructured environments.
Human-robot interaction has become increasingly personalized and cooperative, with systems now capable of adjusting assistance levels based on user capability, performance, and real-time feedback. Pediatric systems, rehabilitation-focused interfaces, and balance-support designs exemplify how HRI has matured into a central pillar of exoskeleton functionality.
Despite these advancements, the review highlights ongoing challenges that warrant future research. These include achieving seamless co-adaptation between user and machine, improving robustness in real-world scenarios, enhancing interpretability of AI-driven systems, and establishing standardized evaluation metrics. Furthermore, broader clinical validation and user trials are necessary to support regulatory approval and large-scale adoption.
In summary, the current state of lower limb exoskeleton research showcases substantial technological maturity and promising real-world potential. Continued interdisciplinary collaboration will be essential to address remaining gaps and drive the field toward deployable, scalable, and personalized mobility solutions. The integration of intelligent control, ergonomic hardware, and intuitive interaction represents the next frontier in wearable robotics. This progress could greatly improve rehabilitation, help people live more independently, and change the way we move in everyday life.
Author Contributions
S.H.: conceptualization, methodology design, manuscript drafting, figure preparation and revision and rewriting. N.A.: data curation, data analysis, manuscript drafting, revision and rewriting. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors
Acknowledgement
The authors would like to express their gratitude to the Mechanical and Manufacturing Engineering Department, College of Engineering and Computing, Miami University for providing the resources and facilities necessary for this research.
Conflicts of Interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this manuscript.
References
- B. Moriarty et al., “The use of exoskeleton robotic training on lower extremity function in spinal cord injuries: A systematic review,” J Orthop, vol. 65, pp. 1–7, Jul. 2025. [CrossRef]
- M. Hunt, L. Everaert, M. Brown, L. Muraru, E. Hatzidimitriadou, and K. Desloovere, “Effectiveness of robotic exoskeletons for improving gait in children with cerebral palsy: A systematic review,” Gait Posture, vol. 98, pp. 343–354, Oct. 2022. [CrossRef]
- M. Sarajchi, M. K. Al-Hares, and K. Sirlantzis, “Wearable Lower-Limb Exoskeleton for Children with Cerebral Palsy: A Systematic Review of Mechanical Design, Actuation Type, Control Strategy, and Clinical Evaluation,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 29, pp. 2695–2720, 2021. [CrossRef]
- A. Gesta, S. Achiche, and A. Mohebbi, “Design Considerations for the Development of Lower Limb Pediatric Exoskeletons: A Literature Review,” IEEE Trans Med Robot Bionics, vol. 5, no. 4, pp. 768–779, Nov. 2023. [CrossRef]
- L. L. Li, G. Z. Cao, H. J. Liang, Y. P. Zhang, and F. Cui, “Human Lower Limb Motion Intention Recognition for Exoskeletons: A Review,” IEEE Sens J, vol. 23, no. 24, pp. 30007–30036, Dec. 2023. [CrossRef]
- Y. P. Zhang, G. Z. Cao, L. L. Li, and D. F. Diao, “Interactive Control of Lower Limb Exoskeleton Robots: A Review,” IEEE Sens J, vol. 24, no. 5, pp. 5759–5784, Mar. 2024. [CrossRef]
- Y. Sun, Y. Tang, J. Zheng, D. Dong, X. Chen, and L. Bai, “From sensing to control of lower limb exoskeleton: a systematic review,” Annu Rev Control, vol. 53, pp. 83–96, Jan. 2022. [CrossRef]
- M. F. Hamza, R. A. R. Ghazilla, B. B. Muhammad, and H. J. Yap, “Balance and stability issues in lower extremity exoskeletons: A systematic review,” Biocybern Biomed Eng, vol. 40, no. 4, pp. 1666–1679, Oct. 2020. [CrossRef]
- D. Pinto-Fernandez et al., “Performance Evaluation of Lower Limb Exoskeletons: A Systematic Review,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 28, no. 7, pp. 1573–1583, Jul. 2020. [CrossRef]
- R. L. Hybart and D. P. Ferris, “Embodiment for Robotic Lower-Limb Exoskeletons: A Narrative Review,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 31, pp. 657–668, 2023. [CrossRef]
- M. S. Amiri, R. Ramli, and M. Van, “Swarm-initialized adaptive controller with beetle antenna searching of wearable lower limb exoskeleton for sit-to-stand and walking motions,” ISA Trans, vol. 158, pp. 640–653, Mar. 2025. [CrossRef]
- J. Kou, Y. Wang, Y. Shi, S. Xu, H. Zhan, and Q. Guo, “Active control strategy of lower limb exoskeleton based on variable admittance control,” Rob Auton Syst, vol. 186, p. 104906, Apr. 2025. [CrossRef]
- Y. Wang, Y. Tian, Y. Guo, and H. Wang, “Active torque-based gait adjustment multi-level control strategy for lower limb patient–exoskeleton coupling system in rehabilitation training,” Math Comput Simul, vol. 215, pp. 357–381, Jan. 2024. [CrossRef]
- Y. Wang, H. Wang, and Y. Tian, “Adaptive interaction torque-based AAN control for lower limb rehabilitation exoskeleton,” ISA Trans, vol. 128, pp. 184–197, Sep. 2022. [CrossRef]
- X. Lu, X. Chen, Y. Bai, and R. Liu, “Explicit model based fuzzy control method for lower limb exoskeleton robot,” Expert Syst Appl, vol. 270, p. 126601, Apr. 2025. [CrossRef]
- Y. Yang, D. Huang, L. Ma, X. Liu, and Y. Li, “Adaptive neural fault-tolerant prescribed performance control of a rehabilitation exoskeleton for lower limb passive training,” ISA Trans, vol. 151, pp. 143–152, Aug. 2024. [CrossRef]
- M. Khamar, M. Edrisi, and S. Forghany, “Designing a robust controller for a lower limb exoskeleton to treat an individual with crouch gait pattern in the presence of actuator saturation,” ISA Trans, vol. 126, pp. 513–532, Jul. 2022. [CrossRef]
- S. Zhang et al., “Actuator optimization and deep learning-based control of pediatric knee exoskeleton for community-based mobility assistance,” Mechatronics, vol. 97, p. 103109, Feb. 2024. [CrossRef]
- W. Sun, J. W. Lin, S. F. Su, N. Wang, and M. J. Er, “Reduced Adaptive Fuzzy Decoupling Control for Lower Limb Exoskeleton,” IEEE Trans Cybern, vol. 51, no. 3, pp. 1099–1109, Mar. 2021. [CrossRef]
- S. Zhang, X. Guan, J. Ye, G. Chen, Z. Zhang, and Y. Leng, “Gait Deviation Correction Method for Gait Rehabilitation With a Lower Limb Exoskeleton Robot,” IEEE Trans Med Robot Bionics, vol. 4, no. 3, pp. 754–763, Aug. 2022. [CrossRef]
- S. Zhang et al., “Generation & Clinical Validation of Individualized Gait Trajectory for Stroke Patients Based on Lower Limb Exoskeleton Robot,” IEEE Transactions on Automation Science and Engineering, pp. 1–12, Aug. 2024. [CrossRef]
- R. Nasiri, M. Shushtari, H. Rouhani, and A. Arami, “Virtual Energy Regulator: A Time-Independent Solution for Control of Lower Limb Exoskeletons,” IEEE Robot Autom Lett, vol. 6, no. 4, pp. 7699–7705, Oct. 2021. [CrossRef]
- W. Li et al., “The Human-Machine Interface Design Based on sEMG and Motor Imagery EEG for Lower Limb Exoskeleton Assistance System,” IEEE Trans Instrum Meas, vol. 73, pp. 1–14, 2024. [CrossRef]
- C. Zou, Z. Peng, L. Zhang, F. Mu, R. Huang, and H. Cheng, “Optimization-Based Adaptive Assistance for Lower Limb Exoskeleton Robots With a Robotic Walker via Spatially Quantized Gait,” IEEE Transactions on Automation Science and Engineering, 2024. [CrossRef]
- R. M. Andrade and P. Bonato, “The Role Played by Mass, Friction, and Inertia on the Driving Torques of Lower-Limb Gait Training Exoskeletons,” IEEE Trans Med Robot Bionics, vol. 3, no. 1, pp. 125–136, Feb. 2021. [CrossRef]
- J. K. Mehr, M. Sharifi, V. K. Mushahwar, and M. Tavakoli, “Intelligent Locomotion Planning with Enhanced Postural Stability for Lower-Limb Exoskeletons,” IEEE Robot Autom Lett, vol. 6, no. 4, pp. 7588–7595, Oct. 2021. [CrossRef]
- S. Qiu, Z. Pei, J. Shi, X. Zhang, C. Wang, and Z. Tang, “Design-Modeling and Control of a Novel Wearable Exoskeleton for Lower-Limb Enhancement,” IEEE Robot Autom Lett, vol. 9, no. 7, pp. 6640–6647, Jul. 2024. [CrossRef]
- J. Casas, C. H. Chang, and V. H. Duenas, “Switched Concurrent Learning Adaptive Control for Treadmill Walking Using a Lower Limb Hybrid Exoskeleton,” IEEE Transactions on Control Systems Technology, vol. 32, no. 1, pp. 174–188, Jan. 2024. [CrossRef]
- L. Yu and S. Bai, “A Modified Dynamic Movement Primitive Algorithm for Adaptive Gait Control of a Lower Limb Exoskeleton,” IEEE Trans Hum Mach Syst, 2024. [CrossRef]
- W. Huo et al., “Impedance Modulation Control of a Lower-Limb Exoskeleton to Assist Sit-to-Stand Movements,” IEEE Transactions on Robotics, vol. 38, no. 2, pp. 1230–1249, Apr. 2022. [CrossRef]
- ChenYu et al., “Learning to Assist Different Wearers in Multitasks: Efficient and Individualized Human-in-the-Loop Adaptation Framework for Lower-Limb Exoskeleton,” IEEE Transactions on Robotics, Sep. 2024. [CrossRef]
- Y. Ma et al., “Online Gait Planning of Lower-Limb Exoskeleton Robot for Paraplegic Rehabilitation Considering Weight Transfer Process,” IEEE Transactions on Automation Science and Engineering, vol. 18, no. 2, pp. 414–425, Apr. 2021. [CrossRef]
- S. Otalora, F. Ballen-Moreno, L. Arciniegas-Mayag, M. Munera, and C. A. Cifuentes, “The AGoRA V2 Unilateral Lower-Limb Exoskeleton: Mechatronic Integration and Biomechanical Assessment,” IEEE Robot Autom Lett, vol. 7, no. 3, pp. 7928–7933, Jul. 2022. [CrossRef]
- G. Aguirre-Ollinger and H. Yu, “Lower-Limb Exoskeleton with Variable-Structure Series Elastic Actuators: Phase-Synchronized Force Control for Gait Asymmetry Correction,” IEEE Transactions on Robotics, vol. 37, no. 3, pp. 763–779, Jun. 2021. [CrossRef]
- L. Bergmann, D. Voss, S. Leonhardt, and C. Ngo, “Lower-Limb Exoskeleton with Compliant Actuators: Human Cooperative Control,” IEEE Trans Med Robot Bionics, vol. 5, no. 3, pp. 717–729, Aug. 2023. [CrossRef]
- X. Wang, R. Zhang, Y. Miao, M. An, S. Wang, and Y. Zhang, “<inline-formula><tex-math notation="LaTeX">$\rm PI^{{\text{2}}}$</tex-math></inline-formula>-Based Adaptive Impedance Control for Gait Adaption of Lower Limb Exoskeleton,” IEEE/ASME Transactions on Mechatronics, 2024. [CrossRef]
- J. C. Arceo, L. Yu, and S. Bai, “Robust Sensor Fusion and Biomimetic Control of a Lower-Limb Exoskeleton With Multimodal Sensors,” IEEE Transactions on Automation Science and Engineering, pp. 1–11, Jul. 2024. [CrossRef]
- Y. A. Li et al., “Exoskeleton-Assisted Sit-to-Stand Training Improves Lower-Limb Function Through Modifications of Muscle Synergies in Subacute Stroke Survivors,” IEEE Trans Neural Syst Rehabil Eng, vol. 31, pp. 3095–3105, 2023. [CrossRef]
- C. Livolsi et al., “Enhancing Walking Performance With a Bilateral Hip Exoskeleton Assistance in Individuals With Above-Knee Amputation,” IEEE Trans Neural Syst Rehabil Eng, vol. 32, pp. 2553–2563, 2024. [CrossRef]
- P. Huang, Z. Li, M. C. Zhou, X. Li, and M. Cheng, “Fuzzy Enhanced Adaptive Admittance Control of a Wearable Walking Exoskeleton With Step Trajectory Shaping,” IEEE Transactions on Fuzzy Systems, vol. 30, no. 6, pp. 1541–1552, Jun. 2022. [CrossRef]
- J. Chen, J. Han, and J. Zhang, “Design and Evaluation of a Mobile Ankle Exoskeleton With Switchable Actuation Configurations,” IEEE/ASME Transactions on Mechatronics, vol. 27, no. 4, pp. 1846–1853, Aug. 2022. [CrossRef]
- H. Li, D. Sui, H. Ju, Y. An, J. Zhao, and Y. Zhu, “Mechanical Compliance and Dynamic Load Isolation Design of Lower Limb Exoskeleton for Locomotion Assistance,” IEEE/ASME Transactions on Mechatronics, vol. 27, no. 6, pp. 5392–5402, Dec. 2022. [CrossRef]
- G. Li, X. Liang, H. Lu, T. Su, and Z. G. Hou, “Development and Validation of a Self-Aligning Knee Exoskeleton With Hip Rotation Capability,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 32, pp. 472–481, 2024. [CrossRef]
- E. Barıs¸küçüktabak et al., “Haptic Transparency and Interaction Force Control for a Lower-Limb Exoskeleton,” IEEE Transactions on Robotics, vol. 40, pp. 1842–1859, Jan. 2023. [CrossRef]
- C. Huang, S. Ji, Z. Chen, T. Sun, Q. Guo, and Y. Yan, “Identification and Analysis of Human-Exoskeleton Coupling Parameters in Lower Extremities,” IEEE Trans Haptics, vol. 17, no. 4, 2024. [CrossRef]
- R. L. Medrano, G. C. Thomas, C. G. Keais, E. J. Rouse, and R. D. Gregg, “Real-Time Gait Phase and Task Estimation for Controlling a Powered Ankle Exoskeleton on Extremely Uneven Terrain,” IEEE Transactions on Robotics, vol. 39, no. 3, pp. 2170–2182, Jun. 2023. [CrossRef]
- J. Zhang et al., “Parallel Elastic Self-Alignment Mechanism Enhances Energy Efficiency and Reduces Misalignment in a Powered Knee Exoskeleton,” IEEE Trans Biomed Eng, vol. 72, no. 2, 2025. [CrossRef]
- J. Chen, J. Ding, J. Han, and J. Zhang, “Design and Evaluation of a Bilateral Mobile Ankle Exoskeleton with High-Efficiency Actuation,” IEEE Robot Autom Lett, vol. 9, no. 6, pp. 5528–5535, Jun. 2024. [CrossRef]
- M. Sharifi, J. K. Mehr, V. K. Mushahwar, and M. Tavakoli, “Autonomous Locomotion Trajectory Shaping and Nonlinear Control for Lower Limb Exoskeletons,” IEEE/ASME Transactions on Mechatronics, vol. 27, no. 2, pp. 645–655, Apr. 2022. [CrossRef]
- L. Bergmann, L. Hansmann, P. Von Platen, S. Leonhardt, and C. Ngo, “Fatigue Assessment and Control With Lower Limb Exoskeletons,” IEEE Trans Hum Mach Syst, 2024. [CrossRef]
- C. Akkawutvanich and P. Manoonpong, “Personalized Symmetrical and Asymmetrical Gait Generation of a Lower Limb Exoskeleton,” IEEE Trans Industr Inform, vol. 19, no. 9, pp. 9798–9808, Sep. 2023. [CrossRef]
- L. Bergmann et al., “Lower Limb Exoskeleton with Compliant Actuators: Design, Modeling, and Human Torque Estimation,” IEEE/ASME Transactions on Mechatronics, vol. 28, no. 2, pp. 758–769, Apr. 2023. [CrossRef]
- M. Zhang, J. Huang, Y. Cao, C. H. Xiong, and S. Mohammed, “Echo State Network-Enhanced Super-Twisting Control of Passive Gait Training Exoskeleton Driven by Pneumatic Muscles,” IEEE/ASME Transactions on Mechatronics, vol. 27, no. 6, pp. 5107–5118, Dec. 2022. [CrossRef]
- F. Li, Z. Chen, M. Yang, D. Tian, F. Gao, and X. Wu, “A Robust Following Controller for Lower Limb Exoskeletons With a Decoding Human Motion Intention Network Under Small Sample Conditions,” IEEE/ASME Transactions on Mechatronics, 2024. [CrossRef]
- V. L. Chiu, M. Raitor, and S. H. Collins, “Design of a Hip Exoskeleton With Actuation in Frontal and Sagittal Planes,” IEEE Trans Med Robot Bionics, vol. 3, no. 3, pp. 773–782, Aug. 2021. [CrossRef]
- W. Meng, Z. Tian, C. Zhu, Q. Ai, and Q. Liu, “Optimized Impedance Control of a Lightweight Gait Rehabilitation Exoskeleton Based on Accurate Knee Joint Torque Estimation,” IEEE Trans Med Robot Bionics, 2024. [CrossRef]
- I. Kang, D. D. Molinaro, G. Choi, J. Camargo, and A. J. Young, “Subject-Independent Continuous Locomotion Mode Classification for Robotic Hip Exoskeleton Applications,” IEEE Trans Biomed Eng, vol. 69, no. 10, pp. 3234–3242, Oct. 2022. [CrossRef]
- X. Wang, S. Guo, B. Qu, and S. Bai, “Design and Experimental Verification of a Hip Exoskeleton Based on Human-Machine Dynamics for Walking Assistance,” IEEE Trans Hum Mach Syst, vol. 53, no. 1, pp. 85–97, Feb. 2023. [CrossRef]
- J. Lin, N. V. Divekar, G. C. Thomas, and R. D. Gregg, “Optimally Biomimetic Passivity-Based Control of a Lower-Limb Exoskeleton Over the Primary Activities of Daily Life,” IEEE Open Journal of Control Systems, vol. 1, pp. 15–28, Jul. 2022. [CrossRef]
- C. Carrasquillo, A. Bajpai, D. Iyengar, K. Collins, A. Mazumdar, and A. J. Young, “Enhancing Human Navigation Ability Using Force-Feedback from a Lower-Limb Exoskeleton,” IEEE Trans Haptics, vol. PP, 2025. [CrossRef]
- J. Lin, N. V. Divekar, G. Lv, and R. D. Gregg, “Optimal Task-Invariant Energetic Control for a Knee-Ankle Exoskeleton,” IEEE Control Syst Lett, vol. 5, no. 5, pp. 1711–1716, Nov. 2021. [CrossRef]
- P. Soriano-Segura, M. Ortiz, E. Iáñez, and J. M. Azorín, “Design of a brain-machine interface for reducing false activations of a lower-limb exoskeleton based on error related potential,” Comput Methods Programs Biomed, vol. 255, p. 108332, Oct. 2024. [CrossRef]
- J. Zhang, D. Liu, W. Chen, Z. Pei, and J. Wang, “Boosting lower-limb motor imagery performance through an ensemble method for gait rehabilitation,” Comput Biol Med, vol. 169, p. 107910, Feb. 2024. [CrossRef]
- S. Tortora et al., “Effect of Lower Limb Exoskeleton on the Modulation of Neural Activity and Gait Classification,” IEEE Trans Neural Syst Rehabil Eng, vol. 31, pp. 2988–3003, 2023. [CrossRef]
- K. Aqabakee, F. Abdollahi, A. Taghvaeipour, and M. R. Akbarzadeh-T, “Recursive generalized type-2 fuzzy radial basis function neural networks for joint position estimation and adaptive EMG-based impedance control of lower limb exoskeletons,” Biomed Signal Process Control, vol. 100, p. 106791, Feb. 2025. [CrossRef]
- G. Wang, Y. Liu, K. Liu, L. Jin, J. Yu, and Z. Sun, “sEMG data driven-based anti-disturbance control enables adaptive interaction of lower limb rehabilitation exoskeleton,” Biomed Signal Process Control, vol. 94, p. 106347, Aug. 2024. [CrossRef]
- J. Liu, X. Zhou, B. He, P. Li, C. Wang, and X. Wu, “A Novel Method for Detecting Misclassifications of the Locomotion Mode in Lower-Limb Exoskeleton Robot Control,” IEEE Robot Autom Lett, vol. 7, no. 3, pp. 7779–7785, Jul. 2022. [CrossRef]
- J. Liu, C. Wang, B. He, P. Li, and X. Wu, “Metric Learning for Robust Gait Phase Recognition for a Lower Limb Exoskeleton Robot Based on sEMG,” IEEE Trans Med Robot Bionics, vol. 4, no. 2, pp. 472–479, May 2022. [CrossRef]
- C. Caulcrick, W. Huo, W. Hoult, and R. Vaidyanathan, “Human Joint Torque Modelling with MMG and EMG during Lower Limb Human-Exoskeleton Interaction,” IEEE Robot Autom Lett, vol. 6, no. 4, pp. 7185–7192, Oct. 2021. [CrossRef]
- X. Song, J. Liu, H. Pan, H. Rao, C. Wang, and X. Wu, “Irrelevant Locomotion Intention Detection for Myoelectric Assistive Lower Limb Robot Control,” IEEE Trans Med Robot Bionics, 2025. [CrossRef]
- M. Yang et al., “A Knowledge Transfer-based Personalized Human-Robot Interaction Control Method for Lower Limb Exoskeletons,” IEEE Sens J, 2024. [CrossRef]
- J. Han, S. Yang, L. Xia, and Y. H. Chen, “Deterministic Adaptive Robust Control with a Novel Optimal Gain Design Approach for a Fuzzy 2-DOF Lower Limb Exoskeleton Robot System,” IEEE Transactions on Fuzzy Systems, vol. 29, no. 8, pp. 2373–2387, Aug. 2021. [CrossRef]
- D. B. Das, O. Das, and M. Inalpolat, “A multi-modal sensing based terrain identification approach for active lower limb exoskeletons,” Expert Syst Appl, vol. 275, p. 126862, May 2025. [CrossRef]
- Y. Liu, D. X. Liu, Y. Ma, S. Guo, and X. Wu, “Landing Area Prediction in Complex Terrains for Walking-assisted Lower-limb Exoskeleton Robot,” Procedia Comput Sci, vol. 226, pp. 120–126, Jan. 2023. [CrossRef]
- D. X. Liu, J. Xu, C. Chen, X. Long, D. Tao, and X. Wu, “Vision-Assisted Autonomous Lower-Limb Exoskeleton Robot,” IEEE Trans Syst Man Cybern Syst, vol. 51, no. 6, pp. 3759–3770, Jun. 2021. [CrossRef]
- C. Li, Y. He, T. Chen, X. Chen, and S. Tian, “Real-Time Gait Event Detection for a Lower Extremity Exoskeleton Robot by Infrared Distance Sensors,” IEEE Sens J, vol. 21, no. 23, pp. 27116–27123, Dec. 2021. [CrossRef]
- W. Zhang et al., “A Novel Quasi-passive Non-anthropomorphic Lower Limb Exoskeleton for Load-bearing,” IEEE Robot Autom Lett, 2024. [CrossRef]
- D. Tian et al., “Dual-Loop Control Framework of a Self-Balancing Lower-Limb Exoskeleton for Assisted Walking,” IEEE Trans Instrum Meas, vol. 73, 2024. [CrossRef]
- Y. Qian et al., “Predictive Locomotion Mode Recognition and Accurate Gait Phase Estimation for Hip Exoskeleton on Various Terrains,” IEEE Robot Autom Lett, vol. 7, no. 3, pp. 6439–6446, Jul. 2022. [CrossRef]
- S. V. Sarkisian, M. K. Ishmael, and T. Lenzi, “Self-Aligning Mechanism Improves Comfort and Performance with a Powered Knee Exoskeleton,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 29, pp. 629–640, 2021. [CrossRef]
- R. L. Mcgrath and F. Sergi, “Repetitive Control of Knee Interaction Torque via a Lower Extremity Exoskeleton for Improved Transparency During Walking,” IEEE Trans Med Robot Bionics, 2024. [CrossRef]
- C. Camardella, F. Porcini, A. Filippeschi, S. Marcheschi, M. Solazzi, and A. Frisoli, “Gait Phases Blended Control for Enhancing Transparency on Lower-Limb Exoskeletons,” IEEE Robot Autom Lett, vol. 6, no. 3, pp. 5453–5460, Jul. 2021. [CrossRef]
- W. Zhang, Z. Ling, S. Heinrich, X. Ding, and Y. Feng, “Walking Speed Learning and Generalization Using Seq2Seq Gated and Adaptive Continuous-Time Recurrent Neural Network (S2S-GACTRNN) for a Hip Exoskeleton,” IEEE/ASME Transactions on Mechatronics, vol. 28, no. 4, pp. 2375–2386, Aug. 2023. [CrossRef]
- Z. Li et al., “Human-in-the-Loop Control of a Wearable Lower Limb Exoskeleton for Stable Dynamic Walking,” IEEE/ASME Transactions on Mechatronics, vol. 26, no. 5, pp. 2700–2711, Oct. 2021. [CrossRef]
- P. Zhang, J. Zhang, Y. Chen, J. Jia, and A. Elsabbagh, “Research on Human-machine Synergy Control Method of Lower Limb Exoskeleton based on Multi-sensor Fusion Information,” IEEE Sens J, 2024. [CrossRef]
- C. Zou, R. Huang, J. Qiu, Q. Chen, and H. Cheng, “Slope Gradient Adaptive Gait Planning for Walking Assistance Lower Limb Exoskeletons,” IEEE Transactions on Automation Science and Engineering, vol. 18, no. 2, pp. 405–413, Apr. 2021. [CrossRef]
- W. S. Barrutia, J. Bratt, and D. P. Ferris, “A Human Lower Limb Mechanical Phantom for the Testing of Knee Exoskeletons,” IEEE Trans Neural Syst Rehabil Eng, vol. 31, pp. 2497–2506, 2023. [CrossRef]
- P. Zhang, J. Zhang, and J. Jia, “Study of Lower Limb Exoskeleton Stair Movement Based on Multicoupled Continuous Dynamic Primitive Gait Learning Strategy,” IEEE Sens J, vol. 24, no. 2, pp. 2009–2019, Jan. 2024. [CrossRef]
- Y. Zhan, W. Zhang, Z. Hou, R. Kang, J. S. Dai, and Z. Song, “Non-anthropomorphic passive load-bearing lower-limb exoskeleton with a reconfigurable mechanism based on mechanical intelligence,” Mech Mach Theory, vol. 201, p. 105753, Oct. 2024. [CrossRef]
- J. Yoon, “Discovering hidden strengths: How a passive lower extremity exoskeleton boosts the isometric pulling capacity to new heights,” Int J Ind Ergon, vol. 104, p. 103661, Nov. 2024. [CrossRef]
- W. Cao et al., “A Lower Limb Exoskeleton with Rigid and Soft Structure for Loaded Walking Assistance,” IEEE Robot Autom Lett, vol. 7, no. 1, pp. 454–461, Jan. 2022. [CrossRef]
- S. Sugiura, Y. Zhu, J. Huang, and Y. Hasegawa, “Passive Lower Limb Exoskeleton for Kneeling and Postural Transition Assistance With Expanded Support Polygon,” IEEE/ASME Transactions on Mechatronics, vol. 29, no. 2, pp. 1193–1204, Apr. 2024. [CrossRef]
- Y. Tu, A. Zhu, J. Song, X. Zhang, and G. Cao, “Design and Experimental Evaluation of a Lower-Limb Exoskeleton for Assisting Workers With Motorized Tuning of Squat Heights,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 30, pp. 184–193, 2022. [CrossRef]
- K. Staman, A. J. Veale, and H. Van Der Kooij, “Design, Control and Evaluation of the Electro-Hydrostatic Actuator, PREHydrA, for Gait Restoration Exoskeleton Technology,” IEEE Trans Med Robot Bionics, vol. 3, no. 1, pp. 156–165, Feb. 2021. [CrossRef]
- Z. Chen et al., “Anthropomorphic Viscoelastic Compliance Control Method for Self-balancing Lower Limb Exoskeletons,” Procedia Comput Sci, vol. 250, no. C, pp. 58–66, Jan. 2024. [CrossRef]
- Y. Zheng, Y. Wang, and J. Liu, “Analysis and experimental research on stability characteristics of squatting posture of wearable lower limb exoskeleton robot,” Future Generation Computer Systems, vol. 125, pp. 352–363, Dec. 2021. [CrossRef]
- S. Gonzalez, P. Stegall, S. M. Cain, H. C. Siu, and L. Stirling, “Assessment of a powered ankle exoskeleton on human stability and balance,” Appl Ergon, vol. 103, p. 103768, Sep. 2022. [CrossRef]
- J. Liu, Y. He, J. Yang, W. Cao, and X. Wu, “Design and analysis of a novel 12-DOF self-balancing lower extremity exoskeleton for walking assistance,” Mech Mach Theory, vol. 167, p. 104519, Jan. 2022. [CrossRef]
- M. A. Normand, J. Lee, H. Su, and J. S. Sulzer, “The effect of hip exoskeleton weight on kinematics, kinetics, and electromyography during human walking,” J Biomech, vol. 152, p. 111552, May 2023. [CrossRef]
- A. V. Prieto, A. Q. L. Keemink, E. H. F. van Asseldonk, and H. van der Kooij, “Implementation and Tuning of Momentum-Based Controller for Standing Balance in a Lower-limb Exoskeleton with Paraplegic User,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2025. [CrossRef]
- B. A. Shafer, J. C. Powell, A. J. Young, and G. S. Sawicki, “Emulator-Based Optimization of a Semi-Active Hip Exoskeleton Concept: Sweeping Impedance Across Walking Speeds,” IEEE Trans Biomed Eng, vol. 70, no. 1, pp. 271–282, Jan. 2023. [CrossRef]
- J. Song, A. Zhu, Y. Tu, X. Zhang, and G. Cao, “Novel Design and Control of a Crank-Slider Series Elastic Actuated Knee Exoskeleton for Compliant Human-Robot Interaction,” IEEE/ASME Transactions on Mechatronics, vol. 28, no. 1, pp. 531–542, Feb. 2023. [CrossRef]
- J. Li et al., “Control of Self-Balancing Lower Limb Exoskeleton for Various Wearers Under Dynamic Deformation,” IEEE/ASME Transactions on Mechatronics, pp. 1–12, Sep. 2024. [CrossRef]
- J. Song, A. Zhu, Y. Tu, J. Zou, and X. Zhang, “Cable-Driven and Series Elastic Actuation Coupled for a Rigid-Flexible Spine-Hip Assistive Exoskeleton in Stoop-Lifting Event,” IEEE/ASME Transactions on Mechatronics, vol. 28, no. 5, pp. 2852–2863, Oct. 2023. [CrossRef]
- C. Zhu and J. Yi, “Knee Exoskeleton-Enabled Balance Control of Human Walking Gait With Unexpected Foot Slip,” IEEE Robot Autom Lett, vol. 8, no. 11, pp. 7751–7758, Nov. 2023. [CrossRef]
- Y. Qian et al., “Adaptive Oscillator-Based Gait Feature Extraction Method of Hip Exoskeleton for Stroke Patients,” IEEE Trans Med Robot Bionics, vol. 6, no. 1, pp. 235–244, Feb. 2024. [CrossRef]
- T. Kim, M. Jeong, and K. Kong, “Bioinspired Knee Joint of a Lower-Limb Exoskeleton for Misalignment Reduction,” IEEE/ASME Transactions on Mechatronics, vol. 27, no. 3, pp. 1223–1232, Jun. 2022. [CrossRef]
- C. Basla, P. Durrenberger, P. Wolf, R. Riener, and H. J. A. Van Hedel, “Changes in Kinematic and Spatiotemporal Gait Parameters With a Biarticular Lower Limb Exosuit for Adolescents With Crouch Gait During Level Walking and Stair Climbing,” IEEE Trans Neural Syst Rehabil Eng, vol. 33, 2025. [CrossRef]
- D. K. Tian et al., “Bionic Design and Control of a 12-DoF Self-Balancing Walking Exoskeleton,” IEEE Transactions on Automation Science and Engineering, 2024. [CrossRef]
- V. Soni and A. Vaz, “Kinematics and kinetics of a knee assistance exoskeleton for sit-to-stand and stand-to-sit motions with energy storage and regeneration: A bond graph approach,” Mech Mach Theory, vol. 205, p. 105866, Mar. 2025. [CrossRef]
- S. O. Schrade et al., “Knee Compliance Reduces Peak Swing Phase Collision Forces in a Lower-Limb Exoskeleton Leg: A Test Bench Evaluation,” IEEE Trans Biomed Eng, vol. 68, no. 2, pp. 535–544, Feb. 2021. [CrossRef]
- H. Lee and J. Rosen, “Lower Limb Exoskeleton - Energy Optimization of Bipedal Walking With Energy Recycling - Modeling and Simulation,” IEEE Robot Autom Lett, vol. 8, no. 3, pp. 1579–1586, Mar. 2023. [CrossRef]
- C. Chen, J. Lv, and Z. Xu, “A Multi-Indicator evaluation method for Human-Machine effectiveness of lower limb wearable exoskeleton,” Biomed Signal Process Control, vol. 91, p. 105976, May 2024. [CrossRef]
- S. Guitteny, Y. Lafon, V. Bonnet, R. Aissaoui, and R. Dumas, “Dynamic estimation of soft tissue stiffness for use in modeling socket, orthosis or exoskeleton interfaces with lower limb segments,” J Biomech, vol. 134, p. 110987, Mar. 2022. [CrossRef]
- S. Zhang, L. Fan, J. Ye, G. Chen, C. Fu, and Y. Leng, “An Intelligent Rehabilitation Assessment Method for Stroke Patients Based on Lower Limb Exoskeleton Robot,” IEEE Trans Neural Syst Rehabil Eng, vol. 31, pp. 3106–3117, 2023. [CrossRef]
- Z. Chen, Q. Guo, Y. Yan, and Y. Shi, “Model identification and adaptive control of lower limb exoskeleton based on neighborhood field optimization,” Mechatronics, vol. 81, p. 102699, Feb. 2022. [CrossRef]
- Y. Sun, Z. Peng, J. Hu, and B. K. Ghosh, “Event-triggered critic learning impedance control of lower limb exoskeleton robots in interactive environments,” Neurocomputing, vol. 564, p. 126963, Jan. 2024. [CrossRef]
- W. Duan, W. Chen, J. Wang, Z. Pei, J. Chen, and H. Shi, “Novel neuromuscular controller application method to improve the balance recovery ability of lower limb exoskeletons,” J Franklin Inst, vol. 360, no. 12, pp. 8200–8223, Aug. 2023. [CrossRef]
- L. Gao, L. J. Zhao, G. S. Yang, and C. J. Ma, “A digital twin-driven trajectory tracking control method of a lower-limb exoskeleton,” Control Eng Pract, vol. 127, p. 105271, Oct. 2022. [CrossRef]
- R. Sharma, P. Gaur, S. Bhatt, and D. Joshi, “Optimal fuzzy logic-based control strategy for lower limb rehabilitation exoskeleton,” Appl Soft Comput, vol. 105, p. 107226, Jul. 2021. [CrossRef]
- C. A. Laubscher, A. C. Goo, and J. T. Sawicki, “Optimal phase-based gait guidance control on a lower-limb exoskeleton,” Control Eng Pract, vol. 139, p. 105651, Oct. 2023. [CrossRef]
- X. Wu, Y. Yuan, X. Zhang, C. Wang, T. Xu, and D. Tao, “Gait Phase Classification for a Lower Limb Exoskeleton System Based on a Graph Convolutional Network Model,” IEEE Transactions on Industrial Electronics, vol. 69, no. 5, pp. 4999–5008, May 2022. [CrossRef]
- J. Wang, J. Liu, G. Zhang, and S. Guo, “Periodic event-triggered sliding mode control for lower limb exoskeleton based on human–robot cooperation,” ISA Trans, vol. 123, pp. 87–97, Apr. 2022. [CrossRef]
- D. Shi, W. Zhang, L. Wang, W. Zhang, Y. Feng, and X. Ding, “Joint-Angle Adaptive Coordination Control of a Serial-Parallel Lower Limb Rehabilitation Exoskeleton,” IEEE Trans Med Robot Bionics, vol. 4, no. 3, pp. 775–784, Aug. 2022. [CrossRef]
- W. Duan, W. Chen, J. Wang, J. Liu, Z. Pei, and J. Chen, “Gait-Generation Strategy for Lower Limb Exoskeleton Based on Central Pattern Generator,” IEEE/ASME Transactions on Mechatronics, 2024. [CrossRef]
- J. Zheng et al., “A GMM-DTW-Based Locomotion Mode Recognition Method in Lower Limb Exoskeleton,” IEEE Sens J, vol. 22, no. 20, pp. 19556–19566, Oct. 2022. [CrossRef]
- L. Chen, Q. Lin, H. Cheng, B. Fang, J. Zhang, and J. Hong, “A Deep Learning Hybrid Model for Identifying Gait Patterns and Transition States of Lower Limb Exoskeleton Wearer,” IEEE Sens J, 2025. [CrossRef]
- C. Livolsi, R. Conti, F. Giovacchini, N. Vitiello, and S. Crea, “A Novel Wavelet-Based Gait Segmentation Method for a Portable Hip Exoskeleton,” IEEE Transactions on Robotics, vol. 38, no. 3, pp. 1503–1517, Jun. 2022. [CrossRef]
- X. Wu, A. Zhu, D. Dang, and L. Shi, “Novel Lightweight Lower Limb Exoskeleton Design for Single-Motor Sequential Assistance of Knee & Ankle Joints in Real World,” IEEE Robot Autom Lett, vol. 9, no. 3, pp. 2391–2398, Mar. 2024. [CrossRef]
- L. Zhou et al., “Lower limb exoskeleton parasitic force modeling and minimizing with an adaptive trajectory controller,” Mech Mach Theory, vol. 170, p. 104731, Apr. 2022. [CrossRef]
- W. S. Barrutia, J. Bratt, and D. P. Ferris, “A Human Lower Limb Mechanical Phantom for the Testing of Knee Exoskeletons,” IEEE Trans Neural Syst Rehabil Eng, vol. 31, pp. 2497–2506, 2023. [CrossRef]
- H. Mohamad and S. Ozgoli, “Online gait generator for lower limb exoskeleton robots: Suitable for level ground, slopes, stairs, and obstacle avoidance,” Rob Auton Syst, vol. 160, p. 104319, Feb. 2023. [CrossRef]
- J. Lin, G. C. Thomas, N. V. Divekar, V. Peddinti, and R. D. Gregg, “A Modular Framework for Task-Agnostic, Energy Shaping Control of Lower Limb Exoskeletons,” IEEE Transactions on Control Systems Technology, pp. 1–17, Jul. 2024. [CrossRef]
- Z. W. Zhang et al., “Blending control method of lower limb exoskeleton toward tripping-free stair climbing,” ISA Trans, vol. 131, pp. 610–627, Dec. 2022. [CrossRef]
- J. Zhao, Y. Zhang, H. Hou, Y. Yue, K. Meng, and Z. Yang, “Active Disturbance Rejection Control With Backstepping for Decoupling Control of Hydraulic Driven Lower Limb Exoskeleton Robot,” IEEE Transactions on Industrial Electronics, pp. 1–10, Jul. 2024. [CrossRef]
- D. Gomez-Vargas, F. Ballen-Moreno, C. Rodriguez-Guerrero, M. Munera, and C. A. Cifuentes, “Experimental characterization of the T-FLEX ankle exoskeleton for gait assistance,” Mechatronics, vol. 78, p. 102608, Oct. 2021. [CrossRef]
- J. Zhao, T. Yang, X. Sun, J. Dong, Z. Wang, and C. Yang, “Sliding mode control combined with extended state observer for an ankle exoskeleton driven by electrical motor,” Mechatronics, vol. 76, p. 102554, Jun. 2021. [CrossRef]
Figure 1.
Flow diagram of the study selection process.
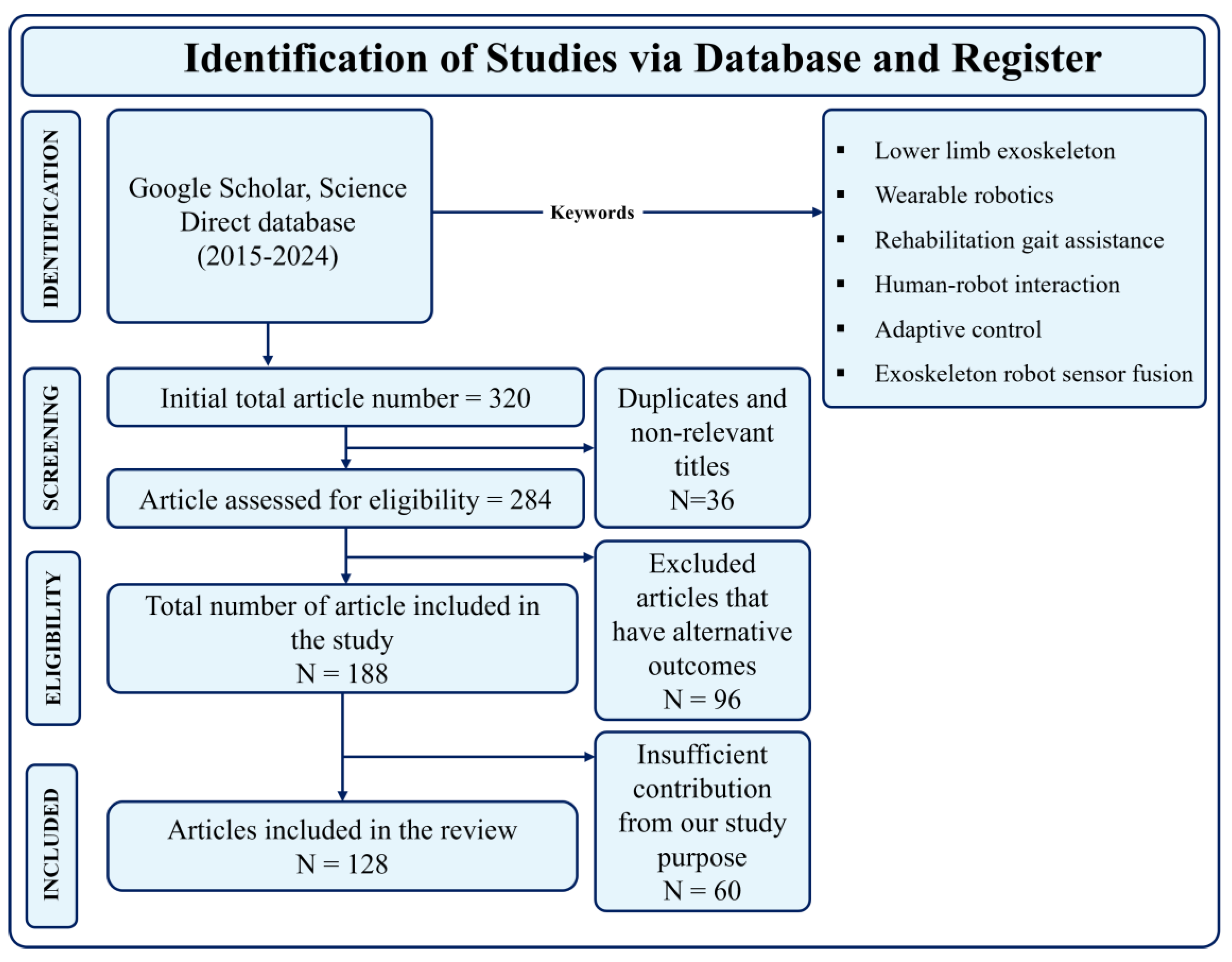
Figure 2.
The illustration highlights four primary use cases: (1) Clinical Rehabilitation for elderly or injured individuals regaining mobility, (2) Pediatric Mobility support for children with motor impairments, (3) Terrain Navigation aiding users in challenging outdoor environments, and (4) Industrial Load Bearing for enhancing strength and reducing fatigue in manual labor tasks.
Figure 2.
The illustration highlights four primary use cases: (1) Clinical Rehabilitation for elderly or injured individuals regaining mobility, (2) Pediatric Mobility support for children with motor impairments, (3) Terrain Navigation aiding users in challenging outdoor environments, and (4) Industrial Load Bearing for enhancing strength and reducing fatigue in manual labor tasks.
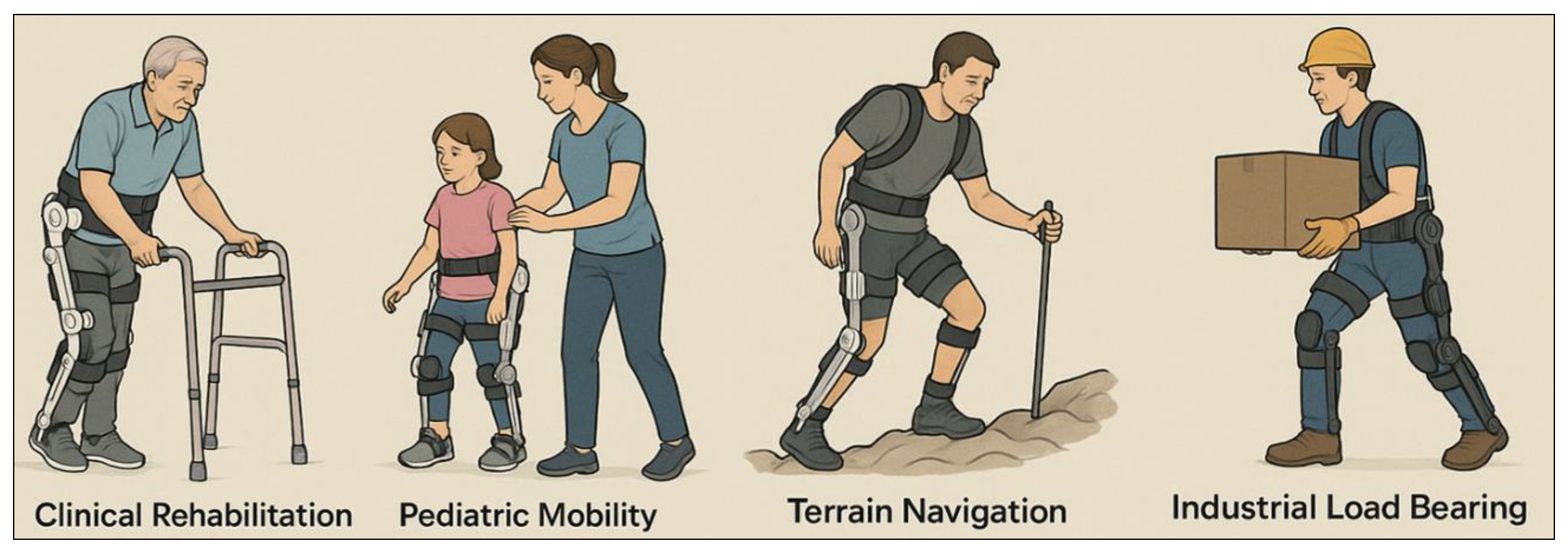
Figure 3.
Four major approaches to exoskeleton control: (1) Model-Based Control using classical control algorithms like PID, (2) Machine Learning for data-driven decision-making and adaptability, (3) Biosignal-Driven Control leveraging EMG or EEG for intuitive user intent recognition, and (4) Digital Twin models for predictive and synchronized control based on virtual-human representations.
Figure 3.
Four major approaches to exoskeleton control: (1) Model-Based Control using classical control algorithms like PID, (2) Machine Learning for data-driven decision-making and adaptability, (3) Biosignal-Driven Control leveraging EMG or EEG for intuitive user intent recognition, and (4) Digital Twin models for predictive and synchronized control based on virtual-human representations.
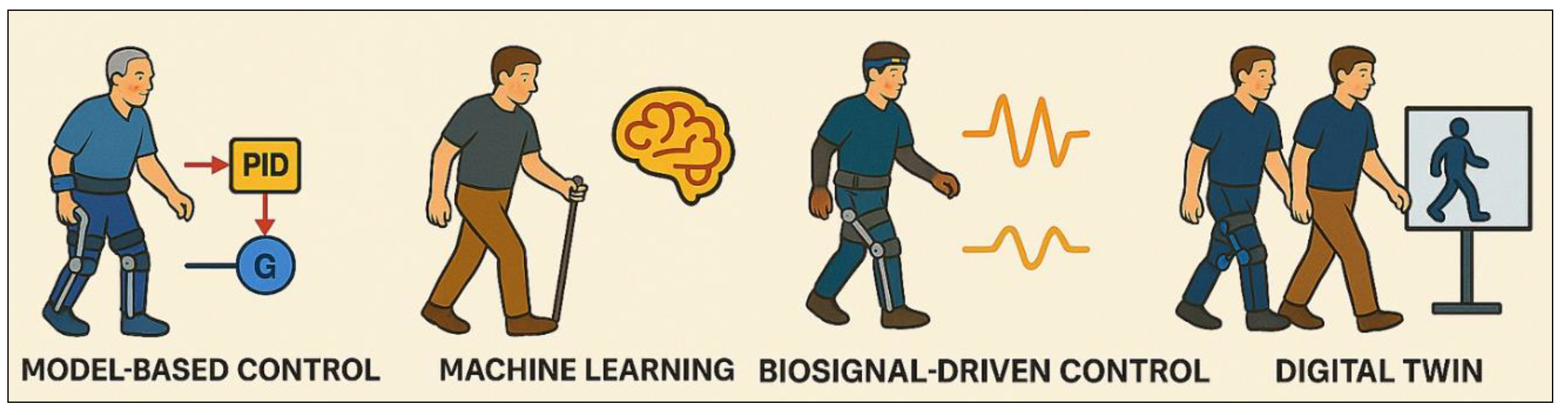
Figure 4.
Key sensor types used to interpret user intent and monitor system dynamics, including EMG and EEG biosignals, inertial measurement units (IMUs), force/torque sensors, vision-based perception, and surface electrodes.
Figure 4.
Key sensor types used to interpret user intent and monitor system dynamics, including EMG and EEG biosignals, inertial measurement units (IMUs), force/torque sensors, vision-based perception, and surface electrodes.
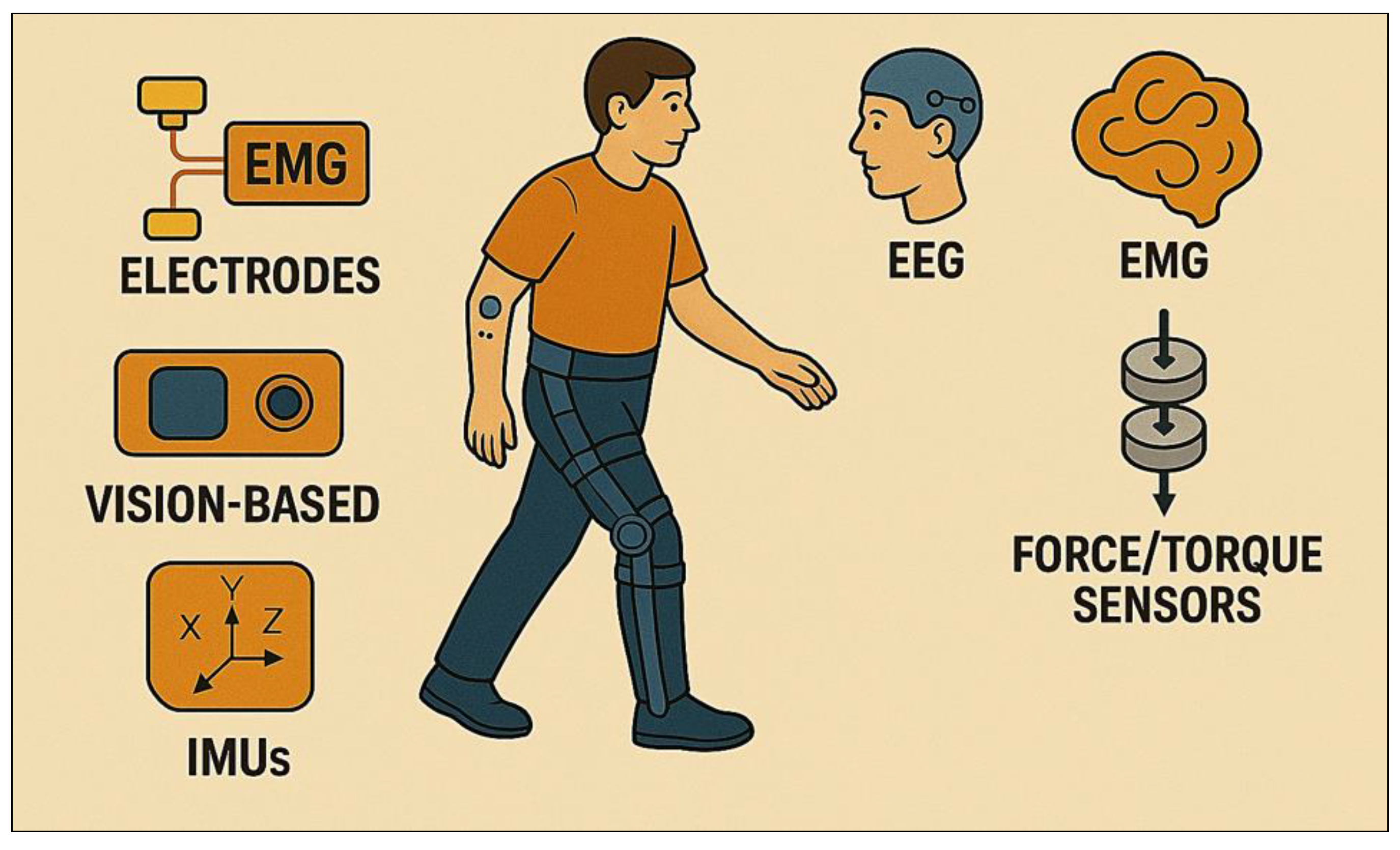
Figure 5.
Hardware design and actuation strategies in lower limb exoskeletons. (1) Fully Actuated systems offering high control precision, (2) Passive designs utilizing mechanical elements like springs, (3) Variable Stiffness systems with hydraulic drives for adaptable force output, and (4) Pediatric-specific designs tailored for children, focusing on lightweight and ergonomic structure.
Figure 5.
Hardware design and actuation strategies in lower limb exoskeletons. (1) Fully Actuated systems offering high control precision, (2) Passive designs utilizing mechanical elements like springs, (3) Variable Stiffness systems with hydraulic drives for adaptable force output, and (4) Pediatric-specific designs tailored for children, focusing on lightweight and ergonomic structure.
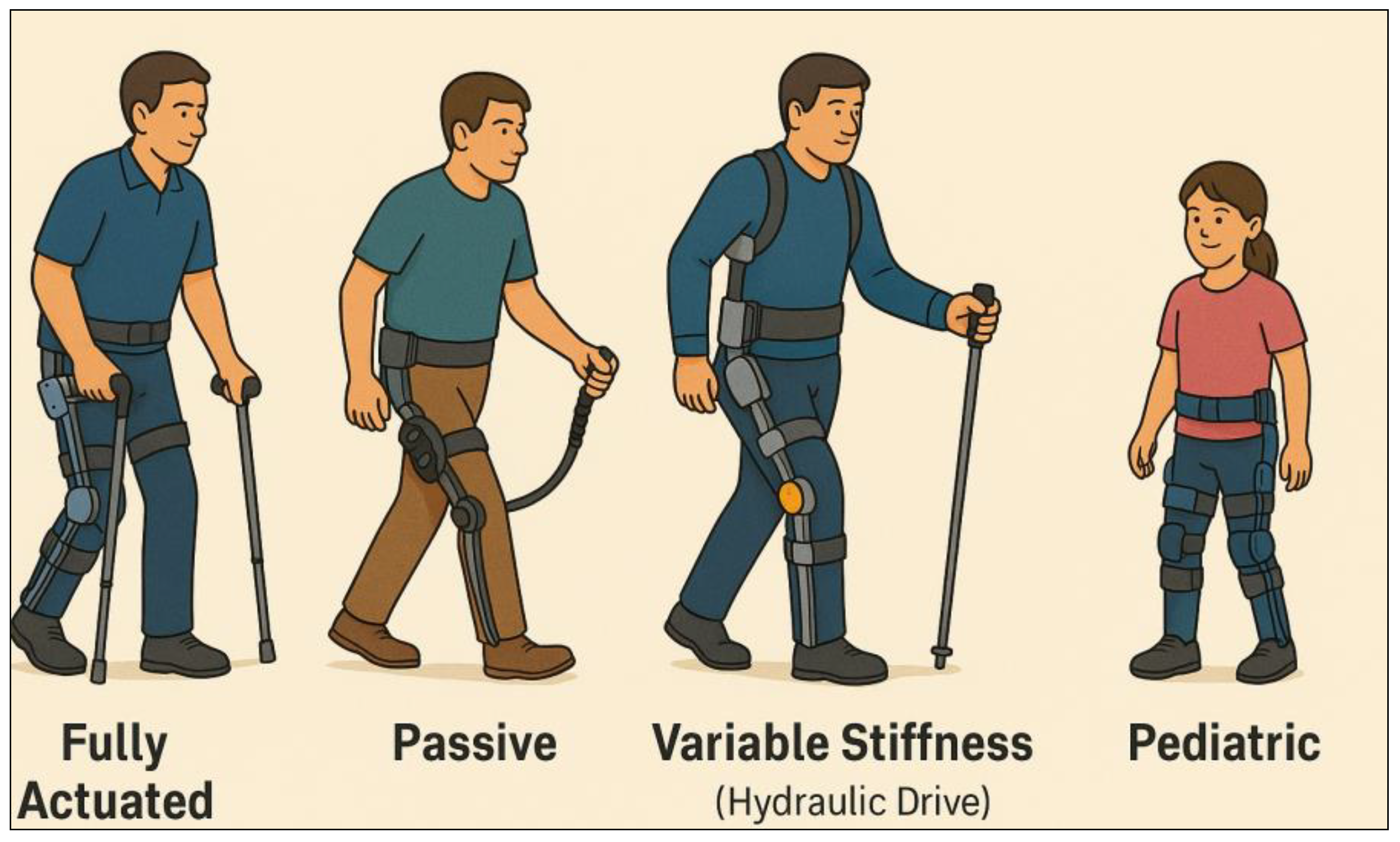
Figure 6.
Human-Robot Interaction strategies in lower limb exoskeletons. (1) Intention Recognition for interpreting user goals, (2) Adaptive Impedance for dynamically adjusting support based on movement and feedback, and (3) pediatric interface (4) impaired user interface.
Figure 6.
Human-Robot Interaction strategies in lower limb exoskeletons. (1) Intention Recognition for interpreting user goals, (2) Adaptive Impedance for dynamically adjusting support based on movement and feedback, and (3) pediatric interface (4) impaired user interface.
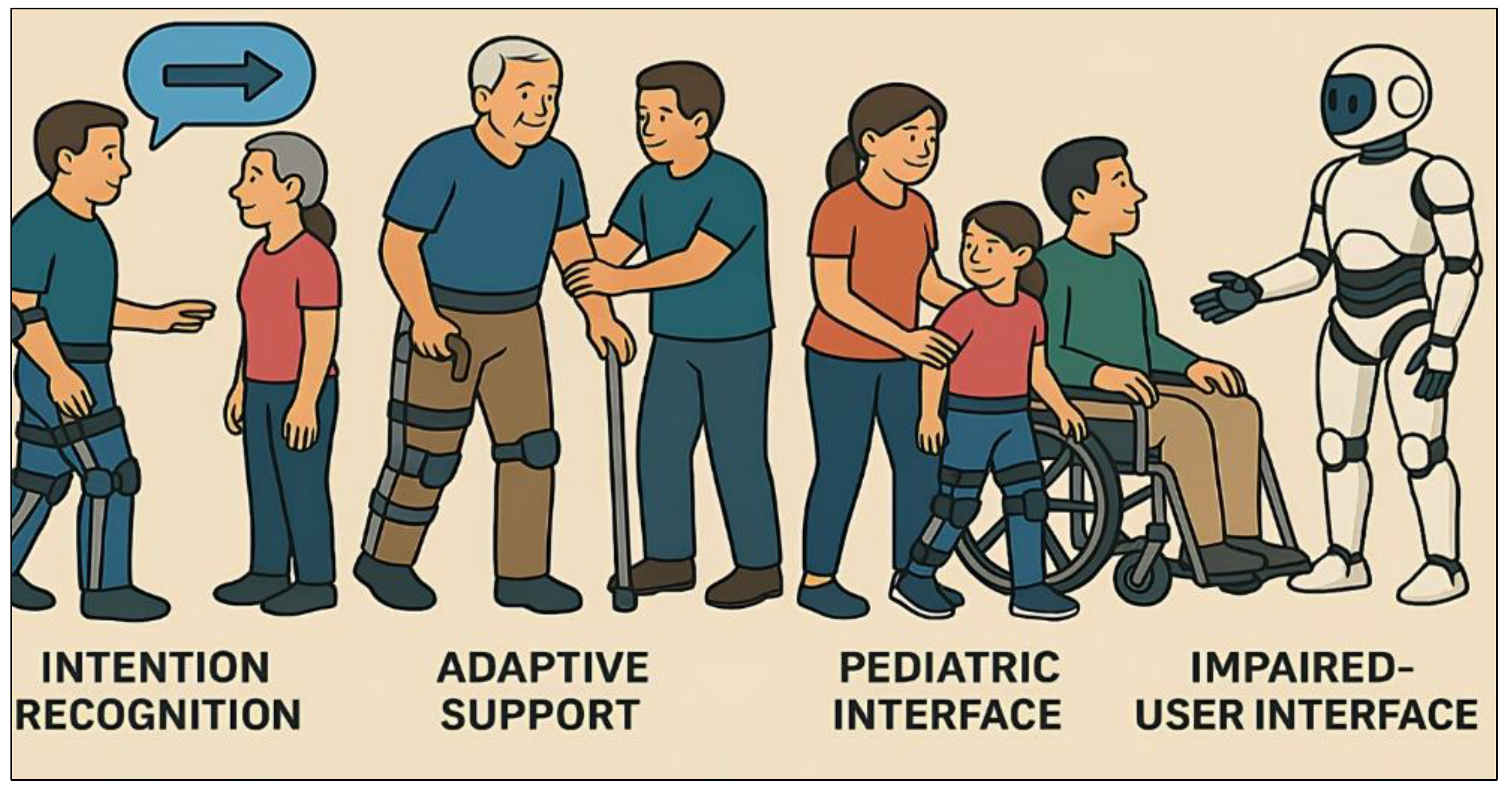
Figure 7.
Evaluation Methods and Subject Testing Approaches in Lower Limb Exoskeleton Research. This figure illustrates key strategies used to assess the performance and real-world applicability of exoskeletons, including simulation-based analysis, testing with robotic phantoms, healthy participant trials, and evaluations involving clinical populations.
Figure 7.
Evaluation Methods and Subject Testing Approaches in Lower Limb Exoskeleton Research. This figure illustrates key strategies used to assess the performance and real-world applicability of exoskeletons, including simulation-based analysis, testing with robotic phantoms, healthy participant trials, and evaluations involving clinical populations.
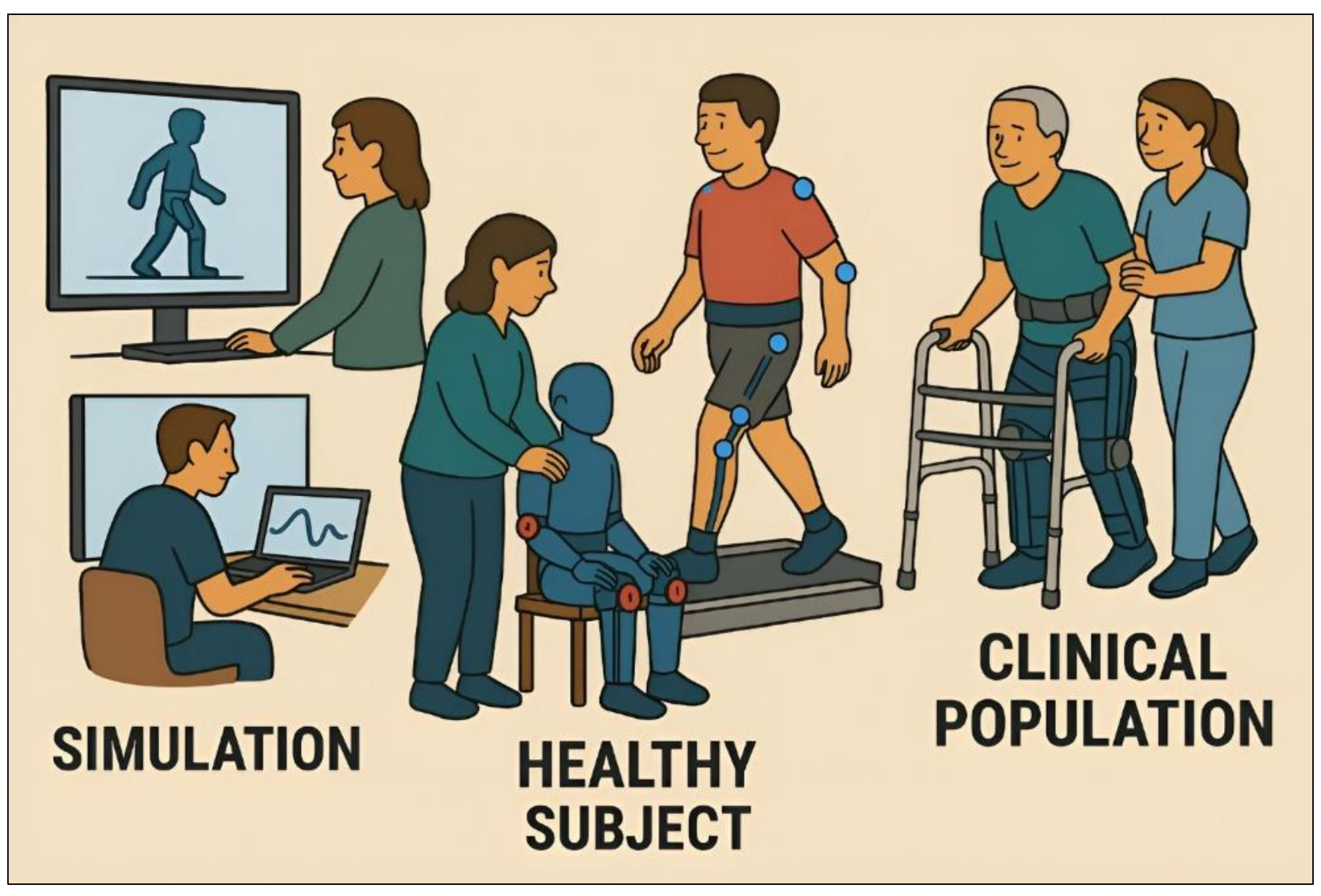
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



