
Submitted:
14 May 2025
Posted:
15 May 2025
You are already at the latest version
Abstract
With growing interest in wearable technologies, the development of flexible sensors and products that can monitor the human body while being comfortable to wear is gaining momentum. However, can be directly integrated into textiles or clothing are lacking. In this study, we fabricated a knitted strain sensor that monitors elbow angles, focusing on dumbbell exercise, which is a basic exercise in sports, and verified its performance. The material of the fabricated knitted strain sensor with a plain stitch structure comprised a silver-plated conductive yarn and an acrylic/wool blended yarn. To evaluate the electrical and physical characteristics of the fabricated sensor, a textile folding tester was used to conduct 100 repeated bending experiments at three angles of 30°, 60°, and 90° and speeds of 10, 30, and 60 cpm. According to the results, the fabricated knitted strain sensor exhibits excellent elasticity, high sensitivity (gauge factor = 698), fast response, and excellent reproducibility and stability even under long-term repeated bending. Sensors with such excellent performance are expected to be used not only in real-time body monitoring but also in various wearable applications.
Keywords:
knitted strain sensor
; conductive yarn
; smart textile
; bending test
; dumbbell
1. Introduction
As research into wearable electronic devices that detect human body movements and monitor respiration or heart rate becomes more active, interest in embedding lightweight, comfortable, and flexible sensors into textiles is increasing [1]. Among wearable electronic devices, strain sensors have been investigated in various application fields because they can recognize and distinguish signals from the human body and the mobility of related organs [2]. The structure, stress, etc. of the conductive and nonconductive yarns and fabrics used in the production of these sensors affect their function and operation [3]. Conductive fabrics with a knitted structure can be used to monitor various joints, such as fingers, wrists, elbows, and knees. In the sports field, they are used to identify training deficiencies in athletes and intentionally guide training [4]. Bozali et al. fabricated a knitted strain sensor with a 1 × 1 rib stitch structure with a strain of up to 40% and a gauge factor (GF) of 1.19 for application in rehabilitation. The authors also conducted 45° and 90° bending experiments on the index finger and demonstrated that the resistance value increased as the bending angle of the fabricated sensor increased [5]. Wang et al. used silver-plated conductive yarn to embed sensors with elastic weft plain stitch structures in clothing and designed these sensors to measure various types of respiration and enable health monitoring [6]. Luhong et al. knitted a sensor using silver-plated conductive yarn and elastic yarn through a knitting machine, and joint motion monitoring was performed to verify the applicability of the sensor to smart medical monitoring [7].
Although knitted strain sensors have a wide range of applications, our study focused on elbow joint monitoring in sports. In many sports, such as baseball, tennis, and golf, postures such as elbow angles are important for improving performance and preventing injuries. To this end, players perform additional weight training to strengthen their arm muscles. A dumbbell is an exercise device that facilitates muscle growth through the simplest and most diverse form of exercise, and we want to evaluate the possibility of monitoring the elbow using a knitted strain sensor, focusing on the dumbbell exercise, which can be a basic exercise.
The important factors in dumbbell exercises are posture, movement speed, number of exercises, and duration of exercise. Accurate posture is important to strengthen the muscles in the target area, and the angle of the elbow is important because, during dumbbell exercises, the dumbbells are held by the hands. In addition, exercise should be performed slowly to provide sufficient muscle stimulation and promote faster growth [8].
For real-time monitoring, high sensitivity, excellent stability, a wide detection range, high elasticity, and rapid recovery from deformation are essential [9]. Sensitivity is an important factor in evaluating the performance of sensors, indicating changes in capacitance or electrical resistance to the rate of strain change caused by the mechanical stimulation of the sensor [10]. To measure bending and extension movements in real time during dumbbell exercises, the responsiveness of the strain sensor is important. Responsiveness can be verified by the speed at which the sensor responds to the bending movement and the time required to return to the extension movement. Dumbbell exercises are long-term, continuous exercises; thus, sensor values must be measured stably and accurately even during long-term repeated bending. This can be confirmed by the reproducibility of the sensor, which is a performance indicator.
In this study, we developed a highly stretchable knitted strain sensor for real-time elbow joint monitoring, focusing on dumbbell exercise, which can be a basic exercise among sports fields, and evaluated the electrical and physical characteristics of the sensor. According to the results, the developed sensor exhibits high sensitivity, reliable long-term repeated sensing performance, excellent reproducibility, and rapid reactivity to deformation, demonstrating its feasible real-time monitoring ability.
2. Materials and Methods
2.1. Structure and Working Mechanism
The conductive yarn used in the fabrication of the sensor was a silver-coated nylon conductive yarn of Amann (Bonnigheim, Germany) with a resistance of <530 Ω/m. A silver-coated nylon conductive yarn with Aman’s <85 Ω/m resistance was used as the lead wire to connect the developed sensor to a microcontroller unit (MCU). Silver-coated nylon conductive yarns have been used in wearable applications, such as human body monitoring, because they exhibit high conductivity, low contact resistance [11], and superior uniformity compared to stainless steel-based conductive yarns [12].
Lu et al. designed a knitted fabric sensor using three structural configurations, namely, plane, 1 × 1 rib, and 2 × 2 rib, and investigated the mechanical properties of the wale direction [13]. Consequently, the plain structure exhibited the highest sensitivity and resulted in greater conductive layer deformation during sensing than the other two structures because of its shorter sinker loop. Liu et al. concluded that the structure of the sensor significantly affected its sensing performance and generally exhibited excellent sensitivity and conductivity in the order of plain, 1 × 1 rib, and 2 × 1 rib [14]. In the study by Kim et al., when the conductive yarn was located on the back side rather than the front side of a knitted sensor, the GF was higher, and the sensor exhibited superior performance in terms of stability and responsiveness [15].
In the present study, the knitted strain sensor sample was manufactured using CMS330 KI TT SPORT E7.2 (STOLL, Rettingen, Germany), a computerized flat knitting machine, and was designed with a plain stitch structure according to a previous study in which a plain stitch-based sensor exhibited superior sensitivity, stability, and reactivity compared to other knit structures.
Figure 1(a) and (b) show diagrams of a knitted strain sensor with a plain stitch structure comprising both conductive and general yarns and the appearance of the sensor when pulled in the front, back, and wale directions. (a) shows the most common plain stitch with the sensor part knitted with only 1-ply of a conductive yarn; thus, the conductive yarn appears on the front, back, and both sides. (b) shows a plain stitch designed to use two needles on the sensor part to position 1-ply of a nonconductive yarn on the front and 1-ply of a conductive yarn on the back. The sensor part of the sample comprised 2-ply, including 1-ply of a silver-coated conductive yarn and 1-ply of a nonconductive yarn (C&TEX, Republic of Korea) at a 1:1 ratio of acrylic to wool, and the rest were made into a plain stitch with excellent elasticity using only 1-ply of a nonconductive yarn [16]. The overall length of the fabricated sample is 265 mm, the width is 90 mm, and the sensor part is 100 mm in length (86 wales) and 20 mm in width (14 courses).
2.2. Measurement of Electromechanical Properties
Based on previous studies, we developed a knitted strain sensor with a 2-ply plain stitch structure (Figure 2(a)). The Arduino program was used for data collection, and for this purpose, it was connected to a MCU by securing the spring snap button to the end of the lead wire (Figure 2(b)). The lead wire was sewn using a zigzag stitch, which is more durable than a straight stitch. The electrical and physical characteristics of the voltage and resistance changes according to the bending angle of the knitted strain sensor were investigated through repeated bending experiments using a textile folding tester, model CKFT-T400 (Netest, Hwasung-si, Republic of Korea) (Figure 2(c)). All knitted strain sensors require a prestretching process to maintain stable electrical characteristics; thus, each sample was prestretched five times before the experiment to ensure stable data measurement [17]. Dumbbell exercises are long-term and continuous; thus, correct posture and elbow angle are important [18]. Therefore, to confirm the possibility of motion recognition for elbow flexion angles and to examine the difference in resistance according to the angles, experiments were conducted at three angles: 30°, 60°, and 90°. The bending times for each experiment were 100 to confirm long-term repetitive bending performance. To determine changes in sensor resistance due to bending and extension, detailed measurements must be performed, including sensor values during bending and extension at low speeds [19]. In addition, to sufficiently stimulate the muscles through dumbbell exercise, the speed of movement must be adjusted not too quickly [20]. Accordingly, the bending speed was tested at three speeds of 10, 30, and 60 cycles per minute (cpm) based on positive and negative movements. The MCU used in the experiment was an Arduino-based ESP 32-PICO (Figure 2(d)), which was connected to the Arduino program to output data every 0.1 s, and 100 repeated bending experiments were conducted.
3. Results and Discussion
3.1. Results of Repeated Bending Experiments
To confirm that the fabricated knit strain sensor is capable of real-time monitoring of the elbow joint angle, its electrical and physical characteristics were evaluated in terms of sensitivity, responsiveness, and reproducibility. The voltage scale of the Arduino used in the experiment was 0–3.3 V, and the serial monitor measured the range of 0–4095. The ∆sensor value extracted from the bending experiment was converted into an actual voltage value [21].
In dumbbell exercises, the muscles used vary depending on the posture, and the right posture is important to prevent injuries caused by inaccurate posture; thus, the elbow joint angle should be accurately measured. Accordingly, the sensor must exhibit high sensitivity for measuring the elbow joint angle in various positions in detail. Similar to sensitivity, responsiveness is an important performance indicator of elbow joint monitoring during dumbbell exercise. To accurately recognize the posture and elbow joint angle in real time during exercise, the sensor must respond quickly when the arm is bent and quickly return to its initial state when the arm is extended; thus, repeatability is required as a performance indicator. To increase the effectiveness of dumbbell exercises, multiple repetitions and a long exercise period are required. For this purpose, the developed knitted strain sensor must exhibit reproducibility to reliably recognize continuous and repetitive movements. Therefore, to verify the elbow joint monitoring performance of the developed knitted strain sensor, its electrical and physical characteristics were evaluated in terms of sensitivity, responsiveness, and reproducibility.
The sensitivity of the sensor was measured based on its GF. Strain sensors based on metal materials generally have a cross-sectional area () that decreases as the length () increases () due to an external force, which increases the resistance. In contrast, as the length decreases, the resistance decreases, which is called the piezoresistive effect [22]. According to the principle of Equation (2), the resistance ()of a metal with electrical conductivity is determined by the cross-sectional area () and length (); thus, the GF is calculated using Equation (3) when the initial resistance () changes according to the length change () [23].
Figure 3(a) shows the GF values at three different angles and a speed of 60 cpm. When the bending angle is 30°, the GF is 111; at 60°, the GF is 271; at 90°, the GF is 698. There is a difference of approximately 2.4 times between 30° and 60°, and a difference in the GF of approximately 2.6 times between 60° and 90°, confirming that the GF value increases as the bending angle increases. Figure 3(b) compares the resistance change rate when the sensor part of the sample is pulled by 10%, 20%, or 30% at a speed of 10 cpm. When pulled by 10%, 20%, and 30%, the resistance change rates were 17.973, 71.478, and 135.799. As the strain increased, the rate of change in resistance also increased. The graph shows a uniform and constant pattern. As shown in Figure 3(c), the voltage value increased as the number of bends increased at the three angles; however, when the average of the bending values for each angle was calculated and compared, 30° and 60° exhibited a difference of approximately 144%, and 60° and 90° exhibited a difference of approximately 25%, confirming the difference in voltage for each angle. Consequently, the differences in the GF, resistance change rate, and voltage depending on the bending angle demonstrate that the fabricated knitted strain sensor exhibits high sensitivity and detects small changes.
In terms of responsiveness, the response speed of the strain sensor to bending motion and the time required by the sensor to return to its initial state were analyzed. A speed of 60 cpm, at which the sensor generally required approximately 1 s to return to its initial state from a bending motion, was considered suitable for checking real-time responsiveness and was considered as a reference. As shown in Figure 3(d), the fabricated knit strain sensor requires 0.5 s for bending motion and 0.5 s for unfolding motion, requiring 1 s to return to its initial state. This result confirms the fast reactivity of the fabricated knitted strain sensor for performing both bending and unfolding motions in a short period of 1 s, which is a single cycle.
For reproducibility, the baseline uniformity of voltage peak-to-peak (Vp-p) and signal size were measured over 100 repeated operations. These parameters are important for evaluating the electrical and physical performance of knitted strain sensors. The uniformity of Vp-p within the same cycle was also evaluated. A uniform baseline indicates that a knitted strain sensor exhibits excellent resilience and reproducibility during the bending and unfolding operations. The fabricated knitted strain sensor exhibits a pattern in which the voltage decreases during the bending motion and then increases during the unfolding motion. As shown in Figure 3(e), the overall baseline exhibited a gentle shape even after 100 repeated bending. To evaluate this trend in more detail, we zoomed in and compared five cycles from the beginning (approximately 0–40 s) to the end (approximately 570–610 s) and observed the recovery process during the five end cycles. According to the results, the voltage during 100 repetitive bending motions increased by approximately 0.5 V in the five end cycles compared to the five start cycles; however, the overall baseline pattern was uniform and stable. Although an irregular shape appeared due to hysteresis during the recovery process, the fabricated sensor can still be used for sensing because it exhibits a small voltage difference of approximately 0.05 V in the unfolded state.
In this study, to monitor elbow joints during dumbbell exercise, a knitted strain sensor with a plain stitch structure with a sensor length of 20 × 100 mm was fabricated using a computerized flat knitting machine. To examine whether the fabricated sensor can distinguish bending and unfolding motions and elbow joint angles in real time during exercise, a repeated bending experiment was conducted. Sensors for monitoring elbow joints should be highly sensitive to recognize fine movements or small angle changes for detailed angle measurements and must have a fast response time to immediately provide accurate posture through real-time angle measurements to assist with exercise. In addition, excellent reproducibility is required for the number of repetitive movements and long-term movement periods. Accordingly, sensitivity, responsiveness, and reproducibility were analyzed as performance indicators to evaluate the electrical and physical characteristics of the fabricated sensor for repetitive bending experiments. In terms of sensitivity, the GF and resistance change rate increased as the bending angle increased, confirming the difference in voltage with respect to the angle. In addition, at a large angle of 90°, the GF of the fabricated sensor was 698, demonstrating its high sensitivity. The responsiveness of the fabricated sensor was evaluated based on a speed of 60 cpm, at which the sensor required approximately 1 s for bending and unfolding motions (0.5 s each), confirming accurate and fast sensing responsiveness. The reproducibility of the fabricated sensor was evaluated and analyzed based on the uniformity of the baseline of Vp-p and the signal size through 100 repeated sensing cycles, and the uniformity of Vp-p was also evaluated within the same cycle. In all experiments, the overall baseline showed a gentle shape even after 100 repeated bending cycles, and when the start and end sections were zoomed by five cycles each and compared, the bending voltage increased by approximately 0.5 V; however, the baselines in both sections exhibited uniform and stable performance. In addition, a slight voltage change of approximately 0.05 V in the recovery state was confirmed due to hysteresis when the sensor returned to the extended state after 100 repeated bending. This is a general limitation of textile sensors, along with the problem of low stability for long-term sensing; however, the fabricated sensor exhibits stable performance during bending, indicating excellent performance and the possibility of real-time elbow joint monitoring.
3.2. Applications of Knitted Strain Sensors
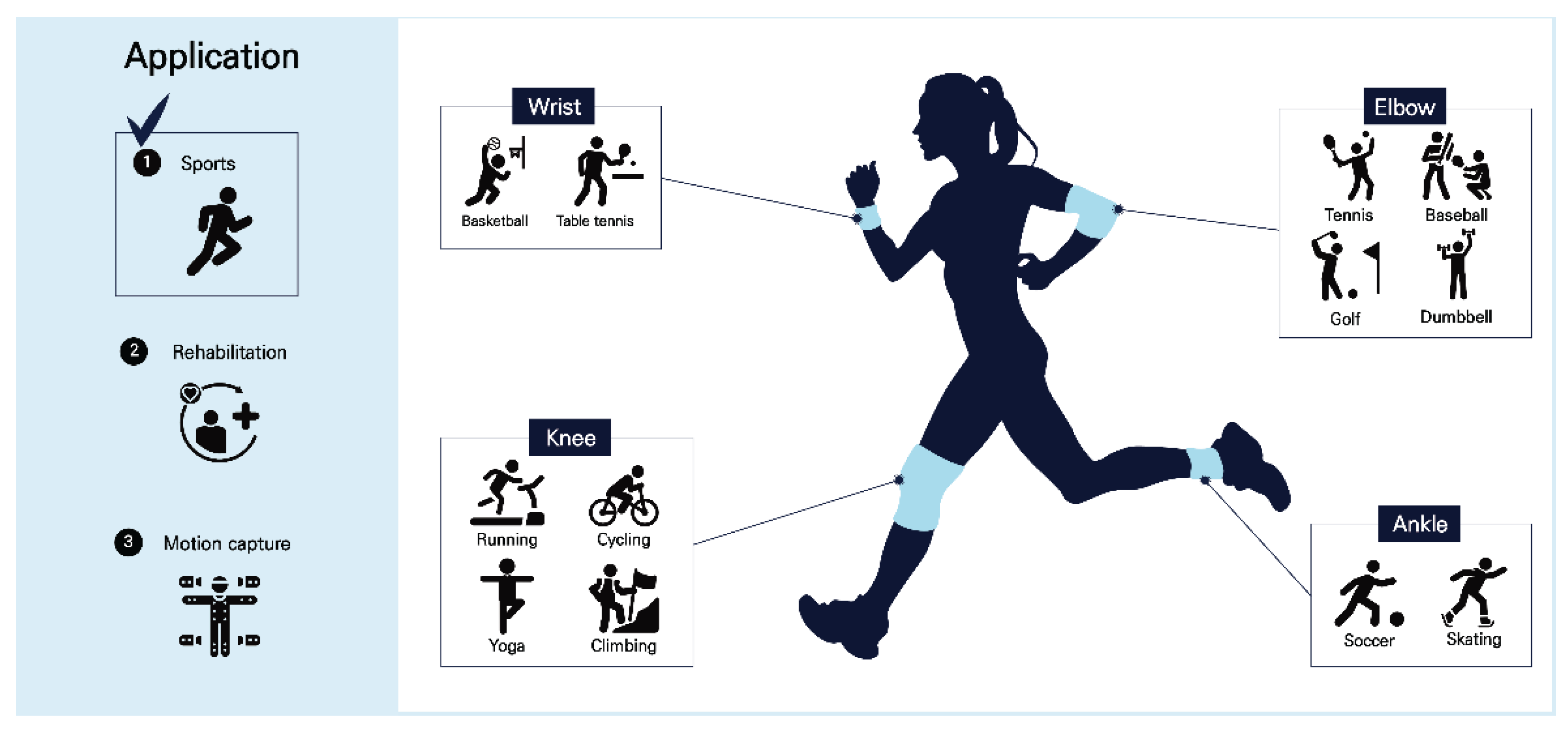
In this study, the fabricated sensor is primarily focused on elbow joint monitoring-based dumbbell exercise; however, in addition to dumbbell exercise, the sensor can also be used in sports that require joint monitoring, such as weight training, baseball, golf, and tennis. The fabricated sensor can also be used to monitor various bendable joints, such as knees, wrists, and ankles, not only elbows. In addition to sports, the sensor can be used in medical and rehabilitation fields, where accurate angles and postures are important, and in the entertainment field, which involves virtual reality and motion capture. The fabricated knitted strain sensor is made of knit material; thus, it is flexible, has a similar fit to regular clothing or protective gear, is in close contact with the skin, and exhibits excellent elasticity and wearability. Therefore, the fabricated sensor has the advantages of less discomfort or foreign body sensation, good breathability, high sensor sensitivity, fast response, excellent reproducibility, and mass production. The sensor is expected to be used as a wearable device in various fields. Figure 4 shows representative applications of knitted strain sensors mounted on different body parts in various sports.
4. Conclusions
In this study, a highly sensitive knitted strain sensor was fabricated using a silver-coated conductive yarn for monitoring elbow joint motions during dumbbell exercise. The sample has a plain stitch structure, which is a general knit structure. To improve the sensitivity, stability, and reactivity of the fabricated sensor, the sensor part was designed to have a nonconductive yarn on the front and a conductive yarn on the back. To evaluate the electrical and physical characteristics of the fabricated sensor, repeated bending experiments were conducted at three speeds and angles, and the experimental results were evaluated in terms of sensitivity, reactivity, and reproducibility. In terms of sensitivity, the GF of the sensor was 698, indicating excellent sensitivity. As the bending angle increased, the GF increased, confirming the difference in resistance with respect to the angle. In addition, when the sensor was pulled by 10%–30% to evaluate the resistance change rate with respect to strain, the resistance change rate increased evenly. In terms of reactivity, at 60 cpm, the fabricated sensor required approximately 1 s to bend and unfold, confirming its fast reactivity and accuracy. In terms of reproducibility, the baseline on the voltage graph was uniform even after 100 repeated bending. In addition, when the start and end sections were magnified and compared, a difference of approximately 0.5 V was observed in the two sections, confirming stable performance even after long-term repeated bending. However, hysteresis occurred during recovery, resulting in a small change of 0.05 V. These results confirmed that the fabricated knitted strain sensor exhibits high sensitivity, fast response, and excellent reproducibility, allowing real-time joint monitoring. Future research should focus on the practical applicability of the fabricated sensor. To monitor not only the elbow but also the knees, fingers, neck, and waist, the fabricated sensor should be directly applied to clothing and protective gear, and in-depth research on the detection performance and safety of movement of the sensor when worn is required. In addition, various environmental factors in daily life, such as temperature and humidity, and factors that can deteriorate the performance of the sensor, such as washability and durability, should be considered. This study contributes to the development of knitted strain sensors directly embedded in clothing and protective gear in various industrial fields that require joint monitoring.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Alam, T.; Saidane, F.; Faisal, A. A.; Khan, A.; Hossain, G. Smart-textile strain sensor for human joint monitoring. Sensors and Actuators A: Physical: 2022, 341, 113587. [Google Scholar] [CrossRef]
- Souri, H.; Banerjee, H.; Jusufi, A.; Strokes, A. A; Park, I.; Sitti, M.; Amjadi, M. Wearable and Stretchable Strain Sensors: Materials, Sensing Mechanisms, and Applications. Advanced Intelligent System: 2020, 2, 2000039. [Google Scholar] [CrossRef]
- Raji, R. K.; Miao, X.; Zhang, S.; Li, y.; Wan, A.; Boakye, A. Knitted piezoresistive strain sensor performance, impact of conductive area and profile design. Journal of Industrial Textiles: 2020, 50, 616–634. [Google Scholar] [CrossRef]
- Son, D.; Lee, J.; Qiao, S.; Ghaffari, R.; Kim, J.; Lee, J.; Song, C.; Kim, S.; Lee, D.; Jun, S. W.; et al. Multifunctional wearable devices for diagnosis and therapy of movement disorders. Nature nanotechnology: 2014, 9, 397–404. [Google Scholar] [CrossRef] [PubMed]
- Bozali, B.; Ghodrat, S.; Jansen, K. M. Design of Wearable Finger Sensors for Rehabilitation Applications. Micromachines: 2023, 4, 710. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Soltanian, S.; Servati, P.; Ko, F.; Weng, M. A knitted wearable flexible sensor for monitoring breathing condition. Journal of Engineered Fibers and Fabrics: 2020, 15. [CrossRef]
- Li, L.; Sun, J.; Cong, H. Design and performance of stretchable resistive sensor based on knitted loop structures for motion detection. Journal of Industrial Textiles: 2023, 53. [CrossRef]
- Morinaga Sports Fitness. (Effective) Dumbbell Exercise Guide. Seoul: Udumji; 2005. Korean.
- Seyedin, S.; Razal, J. M.; Innis, P. C.; Jeiranikhameneh, A.; Beirne, S.; Wallace, G. G. Knitted strain sensor textiles of highly conductive all-polymeric fibers. ACS applied materials & interfaces: 2015, 7, 21150–21158. [Google Scholar] [CrossRef]
- Atalay, O.; Kennon, W. R.; Husain, M. D. Textile-based weft knitted strain sensors: Effect of fabric parameters on sensor properties. Sensors: 2013, 13, 11114–11127. [Google Scholar] [CrossRef] [PubMed]
- Xie, J.; Jia, Y.; Miao, M. High sensitivity knitted fabric bi-directional pressure sensor based on conductive blended yarn. Smart Materials and Structures: 2019, 28, 035017. [Google Scholar] [CrossRef]
- Rumon, M. A.; Cay, G.; Ravichandran, V.; Altekreeti, A. ; Gitelson-Kahn A; Constant, N. ; Solanki, D.; Mankodiya, K. Textile knitted stretch sensors for wearable health monitoring: Design and performance evaluation. Biosensors: 2022, 13, 34. [Google Scholar] [CrossRef]
- Lu, D.; Liao, S.; Wei, Q.; Xiao, X.; Wang, Q. Comparative study of different carbon materials for the preparation of knitted fabric sensors. Cellulose: 2022, 29, 7431–7444. [Google Scholar] [CrossRef]
- Kim, Y.; Jun, J.; Oh, Y.; Choi, H.; Lee, M.; Min, K.; Kim, S.; Lee, H.; Nam, H.; Singh, S.; et al. Assessing the Role of Yarn Placement in Plated Knit Strain Sensors: A Detailed Study of Their Electromechanical Properties and Applicability in Bending Cycle Monitoring. Sensors: 2024, 24, 1690. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Liang, X.; Wan, X.; Kuang, X.; Zhang, Z.; Jiang, G.; Dong, Z.; Chen, C.; Cong, H.; He, H. A Review on Knitted Flexible Strain Sensors for Human Activity Monitoring. Advanced Materials Technologies: 2023, 8, 2300820. [Google Scholar] [CrossRef]
- Kim, Y.; Jun, J.; Oh, Y.; Choi, H.; Lee, M.; Min, K.; Kim, S.; Lee, H.; Nam, H.; Singh, S.; et al. Assessing the Role of Yarn Placement in Plated Knit Strain Sensors: A Detailed Study of Their Electromechanical Properties and Applicability in Bending Cycle Monitoring. Sensors: 2024, 24, 1690. [Google Scholar] [CrossRef] [PubMed]
- Jung, I.; Lee, S. Durability Evaluation of Stainless Steel Conductive Yarn under Various Sewing Method by Repeated Strain and Abrasion Test. Journal of the Korean Society of Clothing and Textiles: 2018, 42, 474–485. [Google Scholar] [CrossRef]
- Morinaga Sports Fitness. (Effective) Dumbbell Exercise Guide. Seoul: Udumji; 2005. Korean.
- Morinaga Sports Fitness. (Effective) Dumbbell Exercise Guide. Seoul: Udumji; 2005. Korean.
- Kim, S. A Smart Glove Study that Performs Language Translation by Pattern Recognition by Applying Strain Sensors. Master’s degree, Hanyang University, Seoul, 2023 Feb.
- Roh, J. Wearable Textile Strain Sensors. Fashion & Textile Research Journal: 2016, 18, 733–745. [Google Scholar] [CrossRef]
- Atalay, O.; Kennon, W. R; Husain, M.D. Textile-based weft knitted strain sensors: Effect of fabric parameters on sensor properties. Sensors: 2013, 13, 11114–11127. [Google Scholar] [CrossRef] [PubMed]
- Kim, S. Programming Noise Filtering System for E-Band Textile Strain Sensor. Master’s degree, Soongsil University, Seoul, 2023 Feb.
Figure 1.
Knitted strain sensor. (a) Schematic of 1-ply plain stitch; (b) Schematic of 2-ply plain stitch.
Figure 1.
Knitted strain sensor. (a) Schematic of 1-ply plain stitch; (b) Schematic of 2-ply plain stitch.
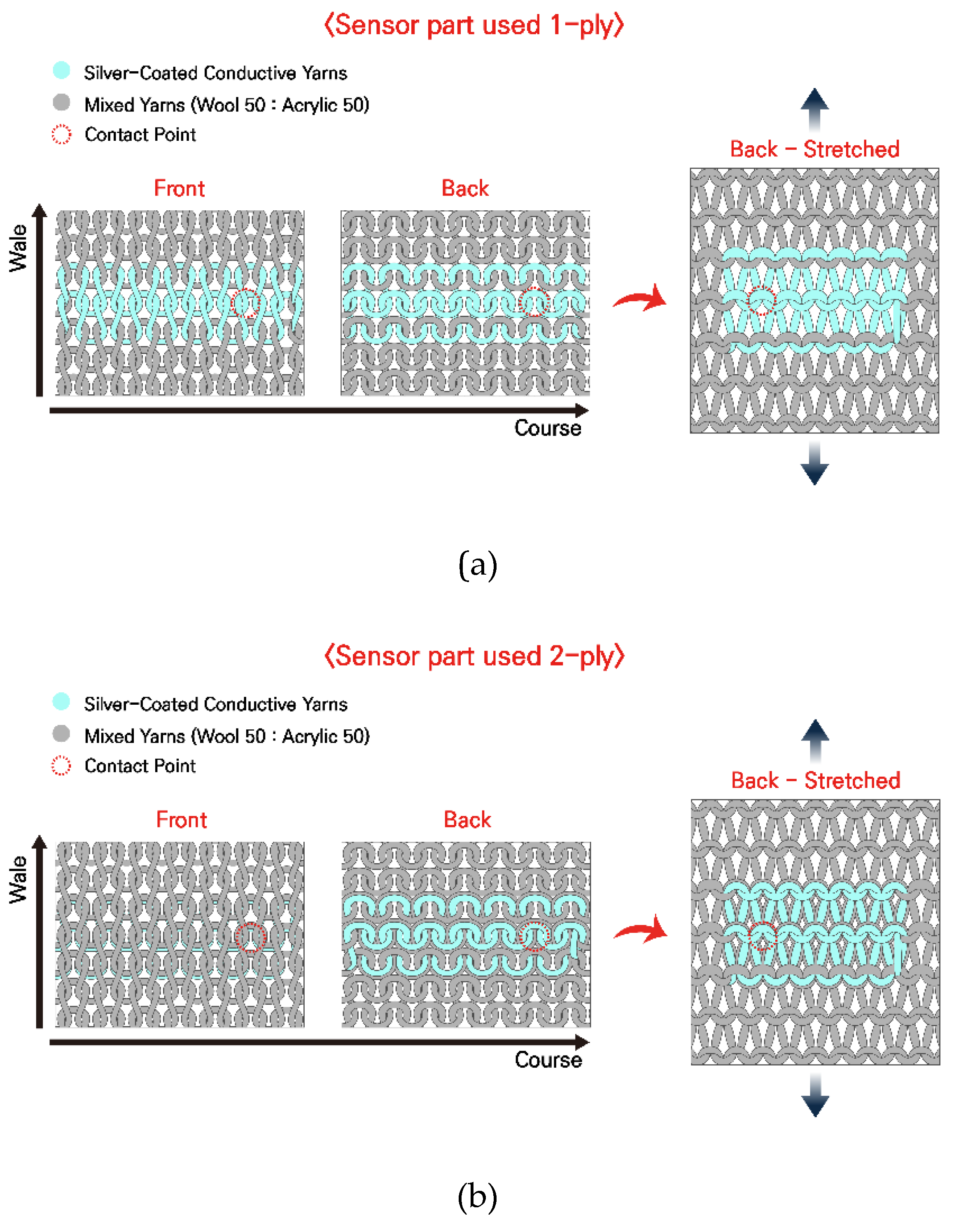
Figure 2.
Bending experiment preparation: (a) knitted strain sensor sample (front, back); (b) knitted strain sensor with sewn lead wires; (c) image of folding tester bent at different angles; (d) schematic of voltage divider of sensor system.
Figure 2.
Bending experiment preparation: (a) knitted strain sensor sample (front, back); (b) knitted strain sensor with sewn lead wires; (c) image of folding tester bent at different angles; (d) schematic of voltage divider of sensor system.
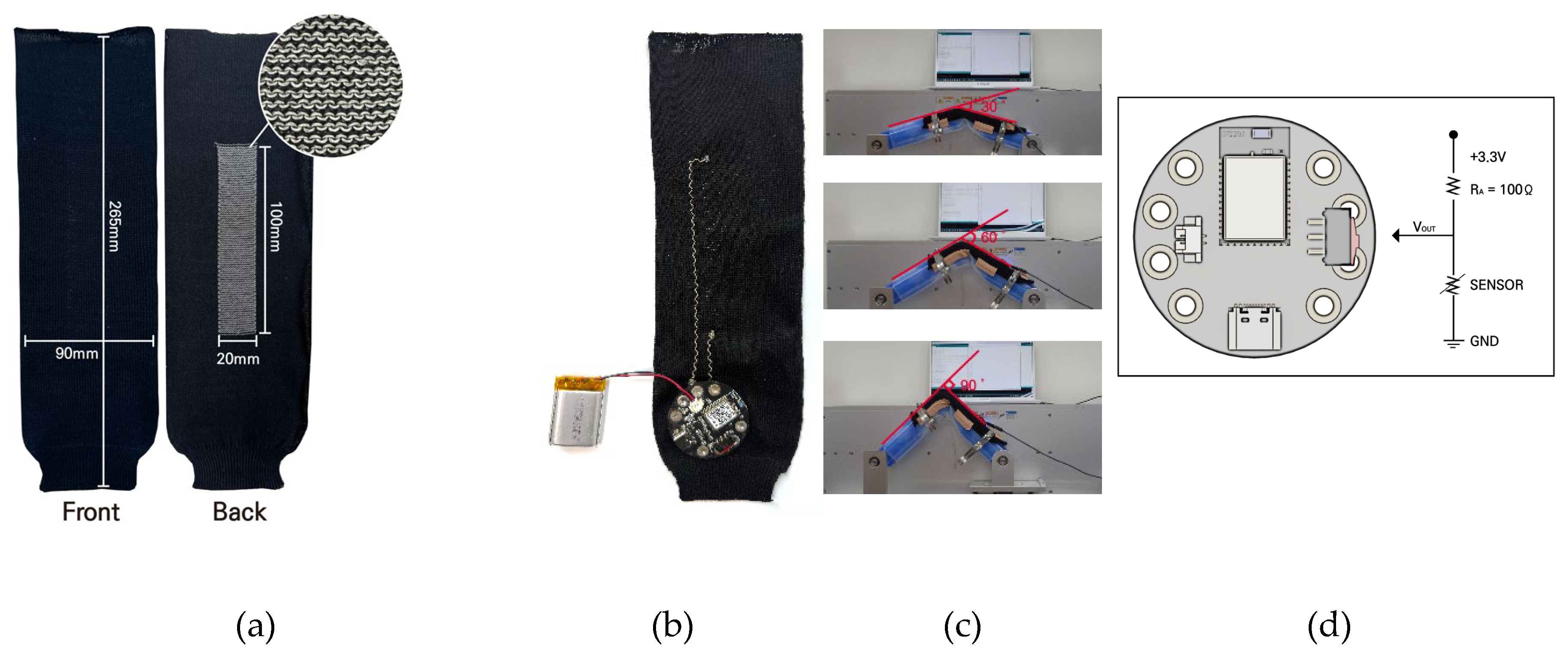
Figure 3.
Results of repeated bending tests: (a) sensitivity by angle at 60 cpm; (b) resistance change rate at 10 cpm; (c) comparison of voltages by angle at 30 cpm; (d) response time at bending angle of 90° and speed of 60 cpm; (e) Voltage and enlarged graphs of the start and end cycles at bending angle of 90° and speed of 60 cpm.
Figure 3.
Results of repeated bending tests: (a) sensitivity by angle at 60 cpm; (b) resistance change rate at 10 cpm; (c) comparison of voltages by angle at 30 cpm; (d) response time at bending angle of 90° and speed of 60 cpm; (e) Voltage and enlarged graphs of the start and end cycles at bending angle of 90° and speed of 60 cpm.
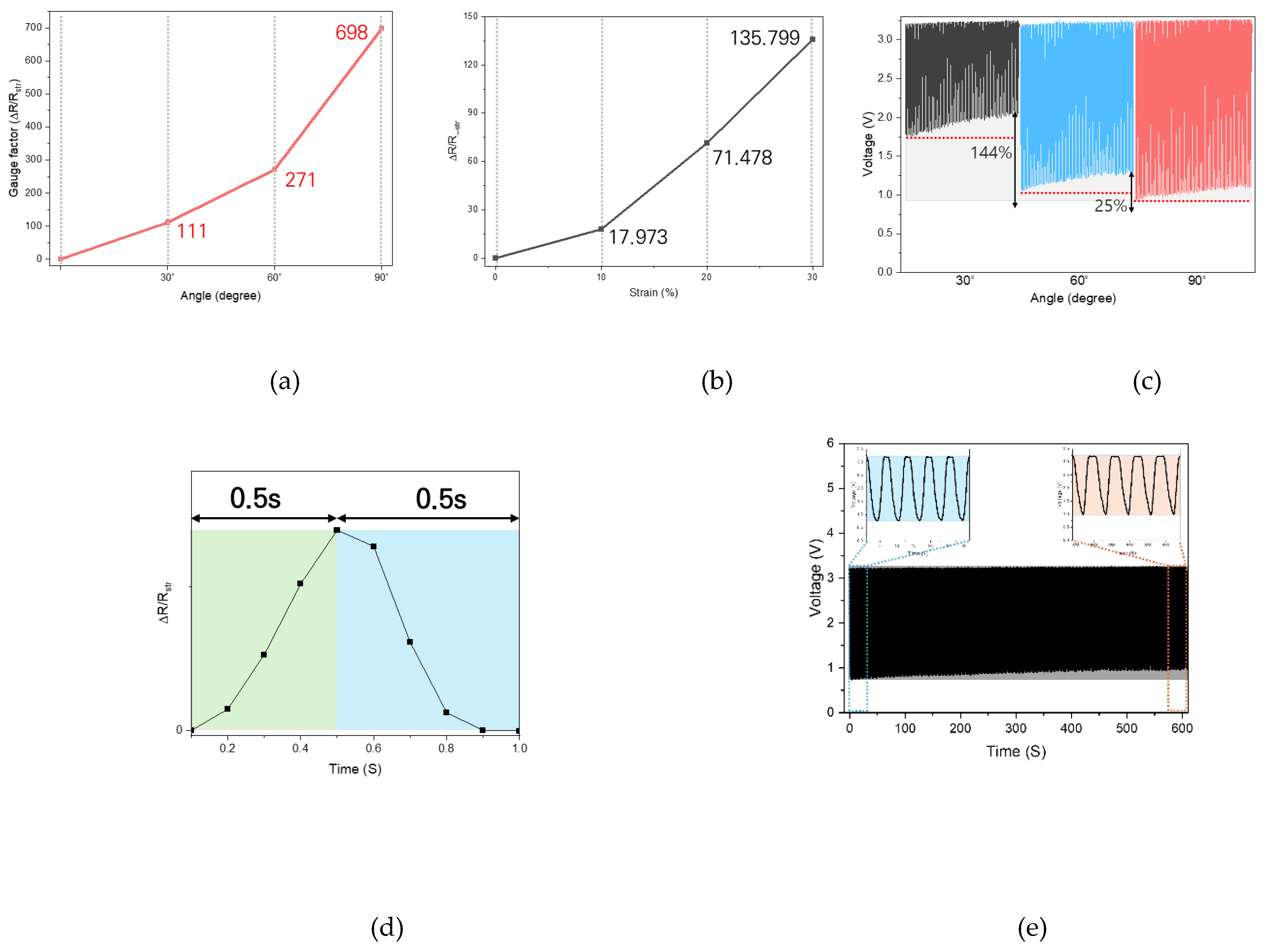
Figure 4.
Possibility of utilizing knit strain sensors in wearable applications.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



