
Submitted:
05 May 2025
Posted:
06 May 2025
You are already at the latest version
Abstract
Vibration control is a critical aspect of engineering, particularly in structures and mechanical systems where excessive oscillations can lead to fatigue, noise, or failure. Vibration suppression is essential in aerospace, automotive, civil, and industrial applications to enhance performance and longevity of systems. Piezoelectric shunt circuits (PSC) offer a passive or semi-active approach to damping vibrations by leveraging the electromechanical properties of piezoelectric materials. Traditional passive damping methods, such as viscoelastic materials, are effective but lack adaptability. Active control systems, while tunable, require external power and complex electronics, increasing cost and weight. Piezoelectric shunt circuits provide a middle ground, utilizing piezoelectric transducers bonded to a structure and connected to an electrical circuit to dissipate vibrational energy as heat or store it electrically. This review synthesizes the fundamental mechanisms, circuit designs, and practical applications of this technology. It also presents the modelling of lumped and distributed-parameter systems coupled with PSC. It complements the recent reviews and primarily focuses on the period from 2019 to date in addition to the earlier seminal works on the subject. It explores the principles, configurations, advantages, and limitations of piezoelectric shunt circuits for vibration control, alongside recent advancements and potential future developments. It sheds light on the research gaps in the literature that future work may tackle.
Keywords:
Piezoelectric shunt circuits
; vibration control
; vibration attenuation
; passive
1. Introduction
Vibration suppression is a critical aspect in various engineering applications, aimed at improving performance, reducing noise, and extending the lifespan of structures and machines. The design of effective vibration absorbers plays a critical role in ensuring the optimal performance and longevity of equipment, regardless of whether the systems involved are on the microscale, such as MEMS, or larger-scale industrial applications. Poorly designed vibration absorbers can lead to a range of undesirable consequences, from increased noise pollution to poor performance and, eventually, system failure. Piezoelectric shunt circuit absorbers have been used as a passive vibration absorber as an alternative of the traditional tuned mass dampers (TMDs) where they have the advantage due to their ease of tuning, straightforward implementation, and minimal added weight, making them a preferred choice for many applications [1,2].
Piezoelectric materials, known for their ability to convert mechanical energy into electrical energy and vice versa, have been extensively utilized for this purpose. Piezoelectric shunt circuits offer an effective method by dissipating vibrational energy through the conversion into electrical energy, which is then dissipated in the circuit. Piezoelectric shunt circuits operate on the principle of the direct piezoelectric effect, where mechanical vibration induces an electrical charge in the piezoelectric material. This electrical energy is then routed into a shunt circuit, where it is dissipated, typically as heat, thereby reducing the mechanical vibration. The effectiveness of the shunt circuit depends on its ability to match the impedance of the piezoelectric transducer and the host structure, ensuring efficient energy transfer. Modeling involves understanding the electromechanical coupling, often using finite element methods, and tuning the circuit parameters to achieve desired damping. Common types of shunt circuits include resistive (R), resonant (RL), and more complex configurations involving capacitors and negative capacitance, each tailored to specific vibration control needs.
Due to their remarkable characteristics and diverse use, piezoelectric materials have drawn a lot of attention in the fields of materials science and engineering. There are two types of piezoelectric effect: the direct effect, where the material converts the mechanical strain into an electrical charge, and the reverse effect, where the material converts an applied electrical potential into a mechanical strain [3]. The direct effect is usually used when the piezoelectric material functions as a sensor, whereas the reverse effect is commonly used when the piezoelectric material functions as an actuator. The piezoelectric fabulous features were exploited to develop active control systems that can be utilized in a variety of industries, including healthcare [4,5], energy harvesting [6], and sensor technologies [7]. Among the numerous applications of piezoelectric materials, their usage in vibration-damping systems has emerged as a potential topic of research. Forward [8] suggested the use of a piezoelectric patch that is connected to electrical elements to transform the structure’s vibrational energy into electrical energy. The mechanical-electrical analogy can be used to explain how the mechanical damping system and the electric circuit are related. The structure's mass, stiffness, damping, and force excitation are equivalent to the electrical circuit’s inductance, capacitance, resistance, and voltage, respectively. Researchers classified piezoelectric shunt circuits into three categories depending on their control methods: passive, active, semi-passive or semi-active. The electrical elements in the shunt circuits, as well as the existence of any external power source, determine which type is used, with each having a unique benefits and limitations.
The passive technique relies on the inherent ability of the piezoelectric material to absorb vibrational energy, resulting in passive energy dissipation without any external power source. On the other hand, active methods utilize sensors and actuators to achieve vibration sensing and activation to suppress vibration in real time [9]. An active control system usually requires powerful power amplifiers and high-performance digital signal processors, which are inappropriate for space applications, to drive actuators. Despite being simpler to construct than active control systems, passive control methods are less resistant to system disturbances [10]. Therefore, the interest in semi-active and semi-passive control systems has increased because of their potential to successfully offer vibration damping using piezoelectric materials. These systems combine the benefits of adaptability and energy efficiency to provide an adaptable way of reducing vibrations in various applications. It is essential to keep in mind that while active control systems can be used to limit low-frequency vibrations, passive shunt circuits can be highly effective at damping high-frequency excitations. Additionally, semi-passive and semi-active techniques are necessary for good control over wide frequency bands, where the hybrid methods combine the best attributes from active and passive approaches [11]. Piezoelectric shunt circuits have been implemented in aerospace applications including the damping wing flutter in aircraft and satellite panels; automotive in reducing noise and vibration in chassis or engine mounts; civil engineering in stabilizing bridges and buildings against wind or seismic loads; and precision machinery in suppressing micro-vibrations in optical systems and manufacturing equipment.
This review provides a comprehensive overview of the current state of the art on vibration suppression using piezoelectric shunt circuits, covering their fundamentals, types, applications, recent developments, and future directions. It complements and builds on the recent reviews of Gripp and Rade [1] and Marakakis et al. [2]. The paper is structured as follows. Section 2 presents the types, applications, and recent development of shunt circuits that details various types, their advantages, and limitations; applications in structural vibration control, noise reduction, and specific industrial contexts; and advances in semi-active and active systems, multi-mode circuits, energy harvesting, and advanced control techniques. Section 3 presents the mathematical models for the coupled response of discrete and distributed-parameter systems attached with piezoelectric shunt circuits. Section 4 presents conclusions that highlight advantages, limitations, challenges and future directions.
2. Types, Applications, and Recent Advances of Piezoelectric Shunt Circuits
Although active piezoelectric damping systems have drawn significant attention, the utilization of piezoelectric shunt circuits in vibration suppression offers important benefits in some applications. Starting with the classical approach, passive control methods provide many benefits, such as the fact that it functions without the need for external power or any active control systems, which simplifies the implementation and reduces energy consumption, playing a significant role in drawing attention to it and making it preferable to the active control systems.
2.1. Single-Mode Resistive (R), Resonant (RL), and (RLC) Circuits
Hagood and Flotow [12] proposed the concept of dissipating mechanical energy by a piezoelectric transducer that is shunt to a passive electrical circuit where the piezoelectric transducer is shunt to a resistor. The piezoelectric transducer behaves as a viscoelastic damper in this case. Where the mechanical energy that is converted to electrical energy will be dissipated as heat from the resistor, in most applications, the resistive shunt is the least to be considered due to its poor performance. In another case, they implemented a series resistor-inductor circuit (resonant) to the system. This configuration can create an electrical frequency and an impedance in the electric circuit so it can be tuned to equal the structure’s natural frequency for a single mode, thus damping the highest vibration amplitude by inducing antiresonance at the natural frequency and minimizing the capacitance of the piezoelectric patch. Moreover, Hagood and Von's approach came with a limitation: damping a low-frequency resonance requires a low electrical resonance, which requires large inductors. The difference between the resistive and resonant circuits was further investigated by Thomas et al. [13]. They found out that while the RL-shunt is the most effective, the R-shunt works well for structures with minimal damping. It's simpler to set up and adjust, making it a viable option. And the most important parameter that controls the performance of the shunt beside the tuning is the electromechanical coupling factor that depends on the piezoelectric patch ability in converting mechanical to electrical energy.
Countering the large inductance problem, Yamada [14] demonstrated a passive technique Using a multi-layered piezoelectric transducer for suppression vibration in flexible structures. The purpose of utilizing a multi-layered piezoelectric element was to improve its capacitance, removing the necessity for a high inductance value in the circuit. Another solution for the large inductance problem was using a synthetic inductor, that by using operational amplifiers a large value of inductance can be emulated with lower energy consumption. The solutions for the large inductance weren’t confined solely to the piezoelectric patch aspect. Other researchers suggested improving the inductor internal design (magnetic core) [15]. Different connections of RL circuits (in series and parallel) were investigated in Park [16], demonstrating a great damping performance by both configurations and especially by the proposed parallel connection that was invented by Wu [17]. Other researchers tried to evaluate the performance of RL circuits under different circumstances and how the tuning is going to be affected. Darleux et al. [18] presented a resonant shunt that can maintain its tuning under different temperatures by using a variable inductor that has a magnetic core that is influenced by the variation of temperature. Pernod [19] presented a resonant circuit that damps the vibration of a cantilever beam under flow induced vibrations in a water tunnel. The ability to work under different circumstances made utilization of RL circuit in damping vibration presented in many applications such as rotor and machine blades [20,21], and aircraft structures [22,23].
While RL shunt circuits have showed promise in improving vibration damping, their effectiveness is highly dependent on selecting the appropriate electrical parameters: resistance (R) and inductance (L). To maximise energy dissipation, aligning the electrical and mechanical resonance frequencies is a must. Many researchers worked on optimum tuning of the shunt circuit [24]. The first two optimization techniques that were proposed for tuning the circuit were presented by Hagood and Flotow [10]. The first optimization approach is the transfer function optimization method that works based on Optimizing circuit parameters to eliminate or minimize peaks in the transfer function at resonance frequencies, hence reducing the system's response to vibrations [25-27]. The other method is the pole placement technique. This method focusses on tuning electrical characteristics so that the system poles are as far to the left as possible on the complex plane. Shifting these poles improves the system's stability and damping properties, resulting in better attenuation [28,29]. Matveenko et al. [30] proposed an approach for selecting the circuit parameters based on a mathematical formulation of the real and imaginary parts of the complex eigenfrequencies by solving for the natural vibration problem. Toftekær et al. [31] demonstrated a method for resistor and inductor tuning for shunt circuits using commercial finite element software ANSYS. The tuning method is based on using the finite element software to find the short circuit and open circuit natural frequencies of the given structure to find the optimal resistor and inductor values for vibration attenuation. In order to maximize the time-averaged electric power dissipation in the shunt resistor and optimize a shunt piezoelectric vibration absorber, Gardonio [32] introduced an online extremum-seeking tuning technique. The method sequentially adjusts the shunt resistance and inductance using a two-path gradient search algorithm.
Those approaches stand out from others that use optimization algorithms for tuning circuit parameters, such as particle swarm optimization [33,34], ant colony optimization [35], and other tuning techniques [36,37]. The optimization in piezoelectric shunt circuits is not exclusive to electrical parameters. The dimensions and the position of the piezoelectric patch play a huge role in the performance of the system by affecting the EMCF and the capacitance of the Piezoelectric patch [38]. They suggested adjusting the arrangement and configuration of shunt piezoelectric patches to enhance vibration damping by improving the modal electromechanical coupling factor (MEMCF). The appropriate patch thickness is dependent upon the Young’s modulus ratio, and its placement must correspond with regions of maximal mode shape slope difference. Symmetric configurations featuring two patches demonstrated greater efficacy than asymmetric arrangements.
2.2. Multi-Mode Resonant (RL) Circuits
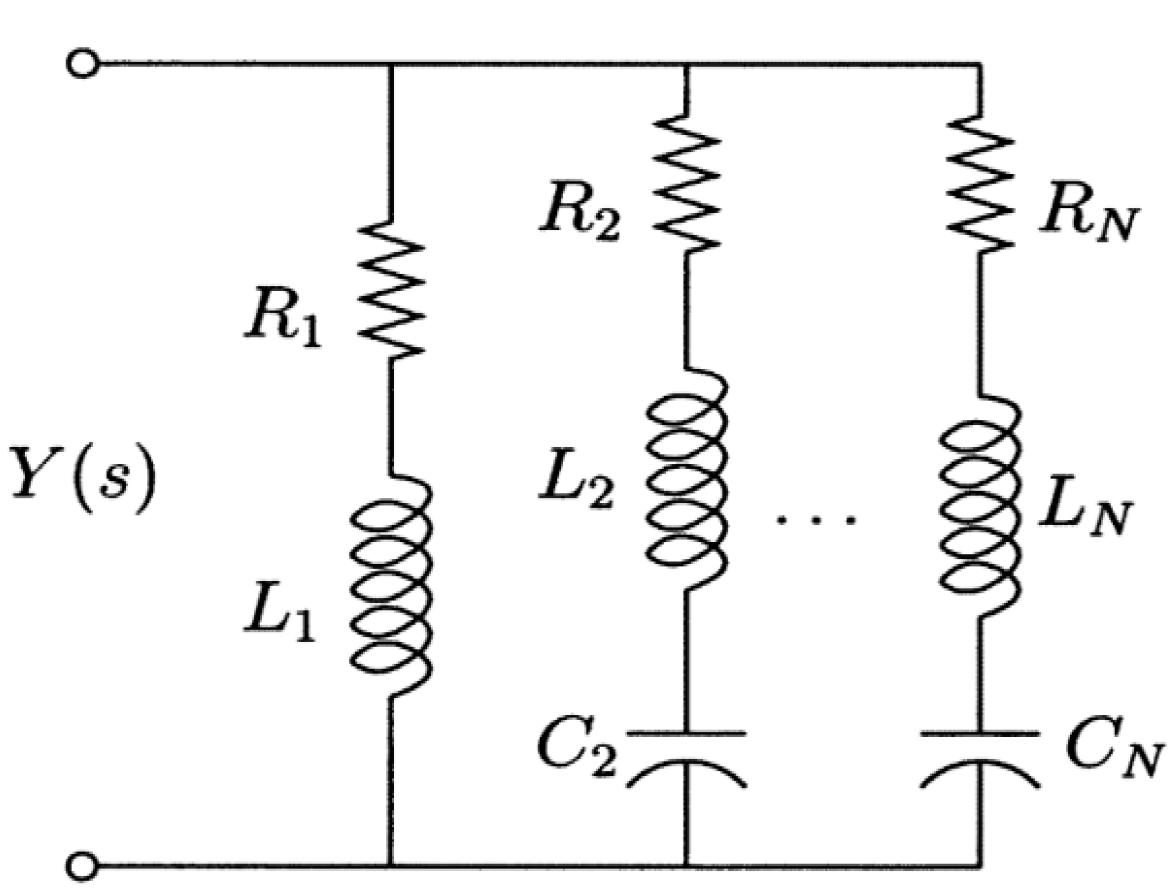
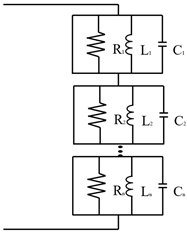
In most life applications, systems are going to have multiple modes, damping multiples modes of vibration was a consarning matter in the field of piezoelectric shunt circuits. Hollkamp [39] proposed an approach for suppressing multiple modes using a single piezoelectric element as shown in Fig. 1. Additional L-R-C circuit branches are coupled in parallel to an RL branch, this work is considered to be the first in presenting a capacitor in a shunt circuit and also having a multiple branch. The number of RLC branches equals the number of modes chosen to be damped. However, it initially lacked a controlled method for tuning each branch separately. Subsequently, researchers tackled this challenge by proposing other circuit configurations to control the branches.
Figure 1.
The electric circuit proposed by Holkamp [39].
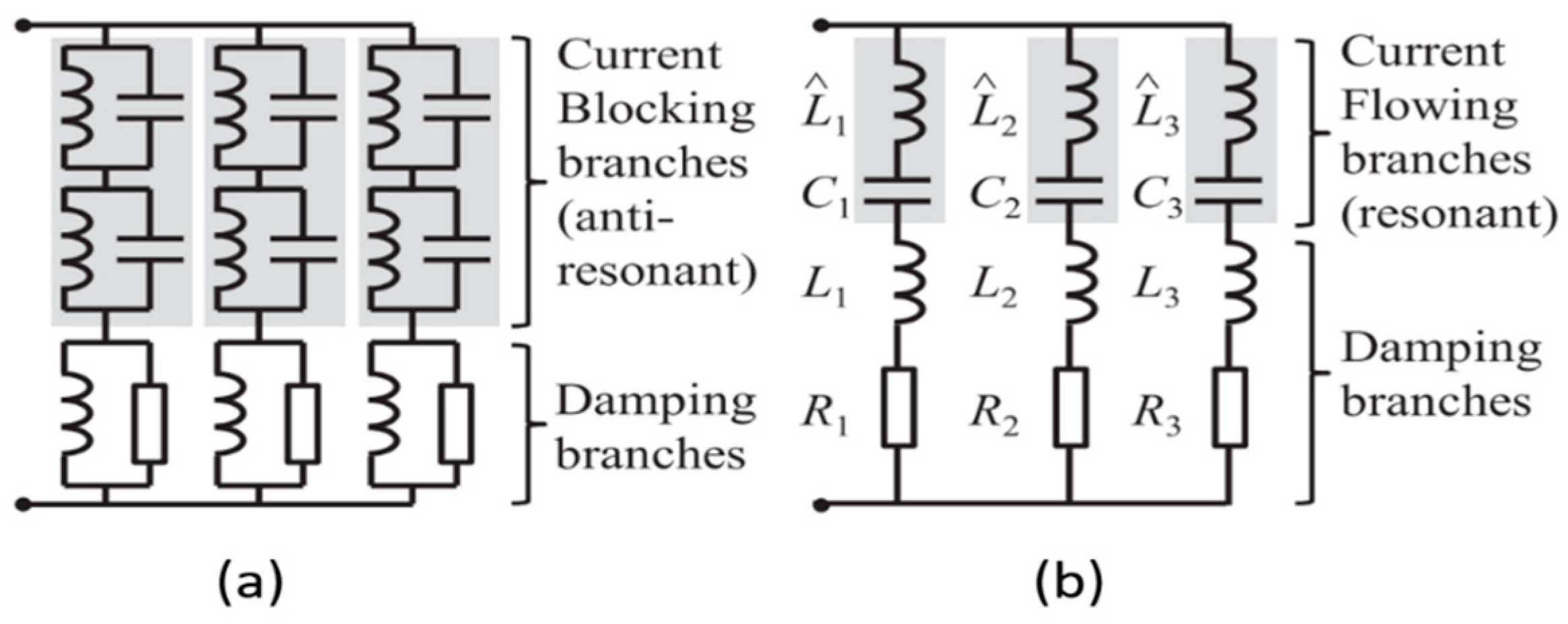
Wu [38,40] have developed a multi-mode shunt that utilizes a current-blocking circuit, The electrical impedance of the LC anti-resonant circuits is designed to reach infinity and act as an open circuit at other branch frequencies, while the targeted branch that matches the resonance frequency of the structure operates and damps the vibration. On the other hand, Behrens et al. [41,42] proposed using “current-flowing” branches in the shunt circuit, The function of the current-blocking shunt and the current-flowing shunt is similar. The current-flowing shunt permits the current to flow rather than stopping it at the natural frequency. This method is better than "current blocking" because the latter requires an equal number of inductors for each mode. A distributed array of piezoelectric transducers connected with RL circuits on a cantilever beam is represented mathematically by Dell Isola et al. [43] each patch is adjusted to dampen a specific mode.
Figure 2.
a) Current blocking circuit and (b) Current flowing circuit, [41,42].
In order to minimize vibrational energy, Fleming and Moheimani [44] proposed a technique for optimizing piezoelectric transducer (PZT) multimode shunt circuits by minimizing the H2-norm of the damped system to obtain ideal resistance values. they achieved considerable mode reduction with reductions of 22 dB and 18 dB in the second and third structural modes, respectively. A neuro-fuzzy controller is proposed by Tairidis [45] in order to improve the performance of multi-modal shunt damping using piezoelectric patches. The objective of the neuro-fuzzy control system was the activation of the suitable shunt circuit at the required frequency. Raze et al., [46] proposed a tuning approach for a simplified current-blocking shunt circuit, and they introduced a two-port network with an electro-mechanical structure called a fictitious shunt branch. Its objective is to tune the electrical elements of the shunt circuit without involving any optimization algorithm. Raze, G. et al. [47] developed a novel sequential tuning method. Based on the effective characteristics of the piezoelectric system around resonance, the shunt impedance's characteristics, such as electrical damping ratios and resonance frequencies, were derived. Ribeiro and Lima [48] proposed the use of passive control to improve aeroelastic stability in lightweight composite structures. The authors proposed using multimodal shunt piezoceramics in parallel topologies, as shown in Fig. 3 to increase the supersonic flutter boundary of composite panels.
Figure 3.
(a) Composite plate FE model with PZT element and (b) resonant circuit in parallel topology for shunt damping of two modes [48].
Figure 3.
(a) Composite plate FE model with PZT element and (b) resonant circuit in parallel topology for shunt damping of two modes [48].
2.3. Negative Capacitance Shunt Circuits
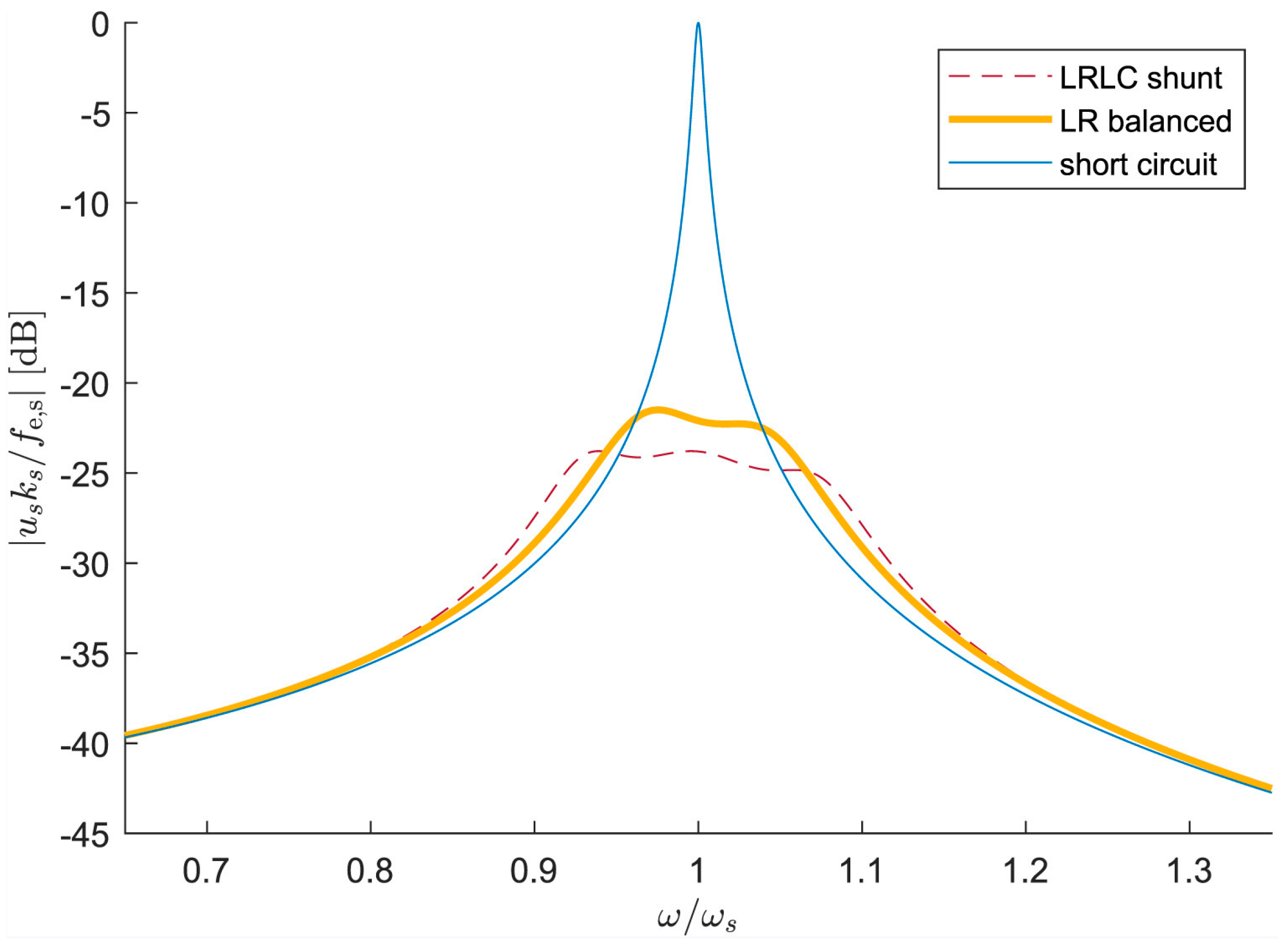
Piezoelectric materials have intrinsic capacitance due to their dielectric characteristics. In a fundamental electrical equivalent model, a piezoelectric patch operates similarly to a capacitor. In addition to the piezoelectric patch's intrinsic capacitance, an external capacitor can be added to the shunt circuit to change its resonance properties and improve performance in vibration control, while the resonant RL circuit operates similarly to the classical dynamic vibration absorber. Using capacitive circuits changes the stiffness of the piezoelectric element [49,50]. The addition of an external capacitor modifies the circuit's total impedance, which can change the resonance frequency and increase the system's damping capabilities. Park et al. [51] and Park and Inman [52] suggested an upgraded shunt circuit consisting of a capacitor C and an RL branch in parallel (RL-C parallel circuit), which allows the ideal value of the inductance L to be reduced for tuning the circuit with a structure that have a low natural frequency. Caruso [34] investigated the former RL-C circuit with comparing it with the RL series and RL parallel, although the RL-C circuit allows for reducing the inductance value, the results indicates that it doesn’t perform as good as the RL series circuit. Berardengo et al. [53] introduced an (LRLC) circuit, shown in Fig. 4, that has two inductors, one capacitance, and one resistance, resulting in two resonances. The presence of supplementary resonance enhanced performance and robustness. According to the results of the numerical simulation, the LRLC shunt had better attenuation values than the LR shunt and a lower amplitude in the FRF, as shown in Fig. 5.
Figure 4.
Circuit diagram of the parallel LR shunt [53].
Figure 5.
Frequency Response Plot for the LRLC shunt [53].
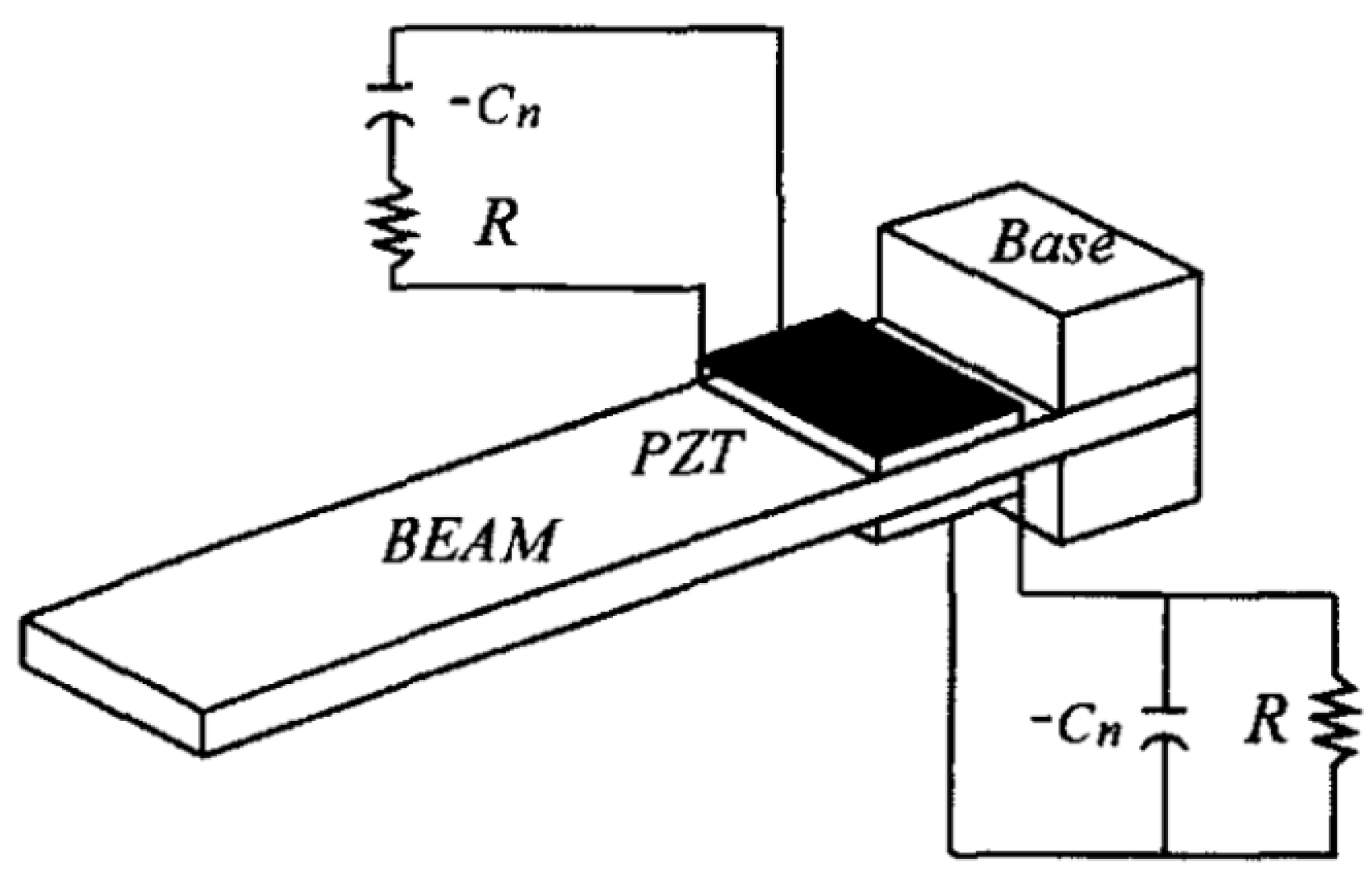
Moreover, the role and shape of the capacitors were modified with introducing the negative capacitance in piezoelectric shunt circuits. Negative capacitors are different than the ordinary capacitors where the former are not considered as a passive component because they contain operational amplifiers. The negative capacitor can increase the electromechanical coupling factor and also increases the broadband of the absorber by cancelling the reactive impedance and the inherent capacitance of the piezoelectric patch. Park and Park [54] proposed a shunt circuit that utilizes piezoceramic patches to attenuate multi-mode vibration amplitudes. The piezoelectric patches are connected in series and parallel to resistor-negative capacitor branch circuits, as shown in Fig. 6. The theoretical analysis provides evidence that this system is capable of significantly minimizing the amplitudes of multiple-mode vibrations throughout the entire frequency range of the structure.
Figure 6.
A schematic of the shunted piezo/beam system [54].
The implementation of a negative capacitance is investigated by Behrens et al. [41]. They demonstrated that the shunt negative capacitance controller effectively attenuates multiple vibration modes. It is less sensitive to environmental changes, easier to implement, and functions as a broad-spectrum vibration absorber. They showed the effectiveness of this method in damping the first six vibration modes. Billon et al. [55] presented a piezoelectric suspension that is connected to an RCN shunt circuit. Negative capacitance shunting offers potential for broadband performance but is limited by the operational amplifiers’ lower voltage capacity compared to the higher driving voltages of piezoelectric transducers. To address this, Pohl [56] introduced a specialized amplification circuit designed for higher voltage applications. Also to solve the problem of capacitance mistuning, they introduced an adaptive negative capacitor that can be electronically tuned to the value of the inherent capacitance of the patch to the electromechanical coupling between the structure and the circuit. Berardengo et al. [57] examined piezoelectric shunts with negative capacitance (NC). In order to balance attenuation and OP-AMP efficiency, they investigated lowering operational amplifier (OP-AMP) demands, improving circuit characteristics, comparing configurations, and offering recommendations for developing NC systems. Wang et al. [58] suggested enhancing vibration suppression and energy harvesting in piezoelectric shunt circuits by utilizing negative capacitance (NC). A self-sustaining system is made possible by the negative capacitor, which enhances suppression while maintaining positive net power.
2.4. Switching Circuits
In order to control energy flow in piezoelectric shunt circuits, state switching involves alternating a piezoelectric actuator between open-circuit (high stiffness) and short-circuit (low stiffness). Up to four switching events are permitted every cycle by the switching sequence, which is controlled by a heuristic control law. The circuit switches, usually from open to short circuit by connecting an inductor or resistor, at maximum stretch (peak strain). The charge is redirected by this switch, oscillating and reversing its path. The circuit reopens after half a cycle, leaving the piezoelectric patch with an opposing charge that opposes its motion. This helps manage deflection, store energy, and release it when required. Piezoelectric actuators' ability to alter mechanical stiffness between open- and closed-circuit states, which improves electromechanical coupling, is a key feature. Because of its self-adaptive broadband behaviour, it is less sensitive to changes in the excitation frequency and electric elements than passive resonant shunting Wu et al. [59].
State-switching was initially employed by Larson [60] to develop an acoustic driver that operated across a wide frequency range. A similar method called Synchronized switched damping (SSDS) was later used by Richard et al. [61,62] , who operated an actuator connected to a resistor in a high-stiffness state for the majority of the vibration cycle and then immediately switched to a low-stiffness state to release energy. Other researchers proposed connecting other electrical components in series with the state switch. Clark [63,64] developed a semi-active control method for mechanical systems that makes use of state-switched piezoelectric actuators (SSD). To store and release energy as needed, the piezoelectric actuator is switched between an open-circuit, short-circuit or resistive-circuit state. Wu et al. [59] introduced a new semi-active piezoelectric damping technique using networking synchronized switch damping (SSD) to reduce vibration in integrally bladed disks (blisks). This method links piezoelectric materials in a network across blade sectors, allowing energy dissipation and redistribution through fewer SSD circuits, lowering system complexity in contrast to typical SSD. Wu et al. [65] presented a linearization technique for Synchronized Switch Damping (SSD) that reduces the intricate nonlinear behavior of SSD to stiffness and viscous damping coefficients that vary with frequency. The utilization of SSD circuits in several applications was further investigated by Liu et al. [66].
Another method for synchronized switch circuits that use an additional inductor (SSDI) was proposed in [67,68]. Rather than discharging the piezoelectric stored energy during a short circuit, the patches are coupled to an inductor, which allowing the voltage to be inverted before being released to open circuit. And by that, the damping mechanism is improved by optimizing the voltage amplitude to be 90 degrees out of phase with the motion.
A control method that controls the modal energy rate was proposed by Corr and Clark [69] for the (SSDI). This method implies that the energy is always dissipated during vibration by operating the switch at the appropriate times to keep the modal energy change rate below zero. In order to control blade vibration, Hongli Ji et al. [70] introduced a semi-active multi-mode vibration control system. In multi-modal applications, this method reduces excessive switching, enhancing vibration control and energy conversion efficiency. The self-tuning (SSDI) technique, which was presented by Kelley and Kauffman [71], adjusts the ideal switch time for vibration reduction without requiring system parameter knowledge. In contrast to traditional SSDI, which only improves switching at resonance, this adaptive method matches resonance performance while improving off-resonance vibration control by using a gradient-based search to find the optimal switch timing depending on phase and system dynamics. Yu et al. [72] suggested an interconnected SSDI technique that, under ideal phase conditions, reduces resonance peaks by more than 30% by establishing an energy transfer channel between piezoelectric patches. Using an improved SSDI technique with a switching algorithm based on displacement thresholds.
Petite et al. [73] proposed a different version of synchronized switching circuits. They developed a method called Synchronized Switch Damping Voltage (SSDV) to improve vibration damping in lightweight structures, especially when there is a weak electromechanical link. In contrast to SSDS and SSDI, which depend on the electromechanical coupling coefficient, SSDV enhances damping performance by compensating for poor coupling by raising the piezoelectric voltage [74] [75]. The SSDV can enhance control performance by amplifying the inverted voltage through the use of a voltage source connected in series with the inductor and connected to the shunting branch. However, using a constant voltage source caused a stability problem. To increase SSDV stability, Badel et al. [76] suggested an improved SSDV technique where the voltage is proportional to the vibration amplitude. To overcome this limitation, further adaptive SSDV strategies are also proposed [77]. Also, to overcome the drawbacks of SSDI and SSDV, which necessitate frequent readjustments of control parameters, Zheng et al. [78] presented a self-powered SSDV (Synchronized Switch Damping on Voltage Source) circuit for vibration control of motorized spindles by using two voltage sources. Synchronized Switch Damping on Voltage (SSDV) had been implemented to solve the issue of dependance on the quality factor of the SSDI; however, it introduced a new issue, which is the need for a constant voltage source.
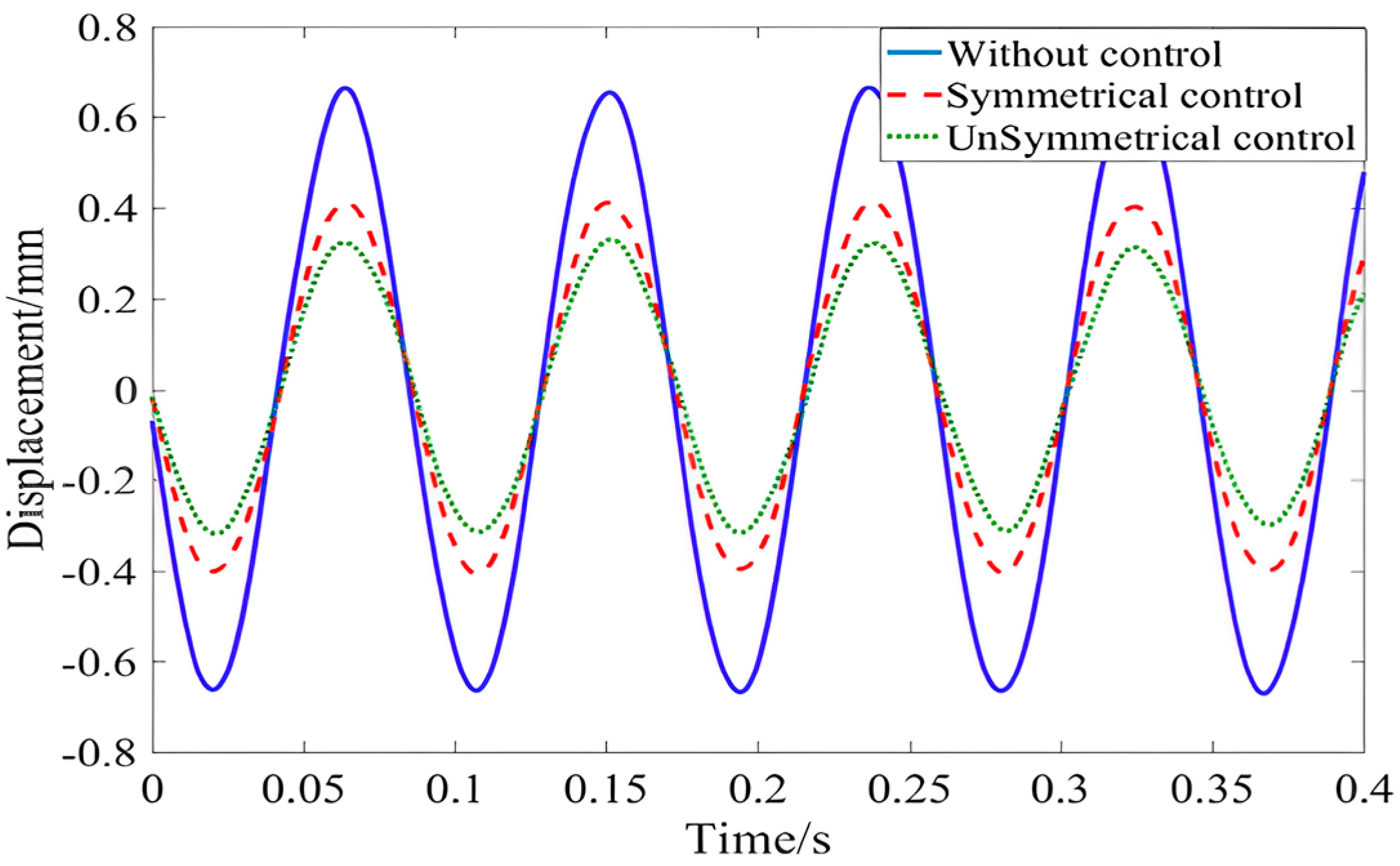
A technique known as synchronized switch damping on negative capacitance (SSD-NC) was introduced by Ji et al. [79] to substitute a negative capacitor for the voltage source. This results in decreasing the inherent capacitance of the piezoelectric transducer, and thus increasing the electromechanical coupling factor, which in turn caused the damping to increase [80]. Tang et al. [81] presented a self-sensing SSDNC circuit that eliminates the requirement for additional sensors and controllers by controlling vibration in cantilever beams with just a basic analog circuit. According to theoretical and experimental assessments, running the OP-AMP in saturation as opposed to the linear area greatly improves stability and damping performance, resulting in ideal attenuation that is less sensitive to changes, Ji et al. [82] created a novel technique to improve vibration control performance by creating unsymmetrical bipolar voltage utilizing an SSDNC shunt circuit. This design simplifies the SSDNC setup in comparison to conventional unsymmetrical SSDV circuits by adding a diode and resistance to the negative capacitance circuit. The study offers a general equation for the switching voltage on the piezoelectric actuator and analyzes stability using offset resistance and negative capacitance. Simulation and experiment results are presented to validate the proposed technique. Figure 7 shows that it can achieve better vibration suppression performance compared to traditional control systems.
Figure 7.
Time-domain plots of the displacement [82].
2.5. Quadratic and Cubic Nonlinear Shunt Circuits
The introduction of quadratic and cubic nonlinear electrical components in piezoelectric shunt circuits has demonstrated great potential for improving vibration suppression capabilities. Unlike linear elements, which provide damping across a narrow frequency range, quadratic and cubic nonlinearities allow for a more flexible and adaptable response to changing vibration intensities and frequencies. The first introduction of quadratic and cubic nonlinear electrical elements into piezoelectric shunt circuits was done by Agnes and Inman [83]. The proposed model can expand the bandwidth of a piezoelectric absorber, but it also generates undesired nonlinear phenomena including quasiperiodic and chaotic motions. Soltani and Kerschen [84] investigated the impacts of a nonlinear piezoelectric tuned vibration absorber based on the similarity principle that is intended to reduce the vibrations of a nonlinear primary system. This principle, which particularly requires that the order of the absorber's nonlinearity equal that of the main system, guarantees that the absorber's dynamic behavior mirrors that of the primary system. These properties work together to transfer energy efficiently, which improves vibration attenuation. Lossouarn et al. [85] presented the first fully passive nonlinear piezoelectric tuned vibration absorber (NPTVA). In contrast to traditional systems, which depended on synthetic inductors and external power, the NPTVA implemented closed magnetic circuits in ferrite material to reach the high inductance values required for low-frequency vibration mitigation. Furthermore, the NPTVA could effectively attenuate vibrations in nonlinear structures by adopting the nonlinear similarity principle. This work was improved in Lossouran et al. [86] to account for mitigating multiple modes. Also, the principle of similarity was applied to create synthetic impedance for nonlinear applications by utilizing a digital signal processor in [87-89].
One sort of nonlinear absorber that can accomplish targeted energy transfer without depending on linear stiffness or damping mechanisms is known as a nonlinear energy sink (NES). Consequently, a NES can be tuned to match any natural frequency of the fundamental structure because its natural frequency is theoretically zero. This property makes it possible to effectively suppress the resonance of the primary structure across a broad frequency range, Geng et al. [90]. The idea of NES has developed further throughout time. More researchers considered modern NES designs as nonlinear shunt circuits that use nonlinear electrical components to increase the absorber's effective damping frequency range and responsiveness to resonant frequencies [91,92]. Silva et al. [93] demonstrated a piezoelectric-based nonlinear energy sink for wideband vibration attenuation that has been experimentally verified. Utilizing operational amplifiers, the study presented a novel shunt circuit that combines a negative capacitance with a cubic nonlinear capacitance. The one-way transfer of energy from the structure to the NES is improved by the cubic nonlinearity, while the negative capacitance eliminates the piezoelectric material's internal capacitance. Another NES shunt circuits utilizing a cubic voltage source was proposed in [94,95].
In linear vibration, modes can be excited independently, leaving the other modes inactive, however, this is not necessarily the case in nonlinear systems. Internal resonances take place when two modes of a nonlinear system are mutually synchronized [96], which means that their frequencies are of a simple integer ratio. This condition can be utilized to result in a unique interaction between these modes, known as the saturation phenomena, which was first demonstrated by Nayfeh et al [97]. The saturation phenomenon causes an energy exchange by creating a threshold for one of the modes and transferring the energy to the other mode that is not directly excited. The type of nonlinearity coupling between the modes and tuning the frequency ratio between them determines the type of internal resonance in the system. For instance, 2:1 and 3:1 internal resonance can be achieved for systems with quadratic, and cubic nonlinearities, respectively. A hybrid nonlinear vibration attenuation approach is proposed by Shami et al [98-101]. A quadratic nonlinearity was added to a shunt circuit to be tuned to obtain a 2:1 internal resonance between the mechanical resonance and the electrical resonance. This created a nonlinear antiresonance and a saturation phenomenon, thus allowing the mechanical amplitude to be independent of the forcing amplitude above a threshold. Al-souqi et al. [102] exploited the idea of the saturation phenomenon via the introduction of the quadratic nonlinearity into the system and investigated the nonlinear vibration suppression of a cantilever beam using a tuned shunt circuit. Some of the results of this reference will be presented in the following sections.
3. Modelling of Dynamical Systems with Piezoelectric Shunt Circuits
3.1. Lumped-Parameter Systems
The generalized electromechanical equations of motion for multi-degree-of-freedom systems coupled with piezoelectric shunt circuits are developed and presented in the literature by many authors, e.g. Hagood et al. [103] and Park [16] as follows:
where , and are the system’s mass, damping, and stiffness matrices, respectively, is the electromechanical coupling matrix between the host structure and the piezoelectric material, respectively, is the inherent piezoelectric capacitance matrix, is the applied mechanical force vector, is the electric charge vector, is the generalized mechanical coordinates vector and is the generalized electrical coordinates vector, which is the physical voltage at the piezoelectric electrodes. Moreover, the damping matrix is assumed to be a proportional viscous damping to facilitate modal coupling. For finite element models, Eqs. (1) and (2) hold with the definition of as the system’s global mass, damping, and stiffness matrices, respectively [98-101, 104]. The piezoelectric capacitance is a function of the geometry and the material of the piezoelectric patch, defined as follows:
where and are the permittivity and piezoelectric charge coefficient. Furthermore, ,, and are the piezoelectric length, width and thickness respectively.
The electric voltage across the piezoelectric patch in the Laplace transformed form is as follows:
where is the voltage across the impedance, is the current flowing through the impedance, is the shunt impedance, and is the Laplace operator. The current can also be obtained by differentiating Eq. (2) and substituting into Eq. (4) to obtain
After rearranging, one can obtain
Applying the inverse Laplace transformation for and substituting the outcome into Eq. (1), the following equation is obtained:
Equation (7) presents the coupled electromechanical equation of motion for a single degree of freedom beam with piezoelectric shunt circuits connected to it. The contribution of the piezoelectric shunt circuit shown in Eq. (6) acts as an additional damper for the system. and are material properties of piezoelectric material. The high values of the electromechanical properties of piezoelectric materials allow them to be used as dampers rather than any other material without the need for high inductance values in the circuit.
Where the total electrical impedance of the shunt piezoelectric patch, is given as
Therefore, the type of electrical elements connected to the piezoelectric patch directly dictates the performance of the shunt circuit. For a circuit that only contains a resistor, the smaller the impedance the better the performance. This is not the case for all circuit configurations, this will be further discussed in the next section. It is helpful to first look at a chart that shows a variety of shunt circuits frequently used in control applications before diving into a thorough literature analysis of the various control strategies used in vibration damping. Table 1 shows some of the common circuit configurations utilized in passive control systems with their total electrical impedance .

Table 1.
Common Shunt Circuits and their Impedance.
| Circuit Name | Circuit Configuration | Total Impedance | Characteristics | References |
|---|---|---|---|---|
| R circuit |  |
Passive control Single-mode It behaves similarly to a Viscoelastically damped system. |
[12] | |
| RL circuit in series | 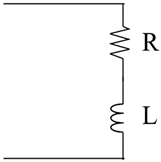 |
Passive control Single-mode. It creates an electrical frequency that can be tuned to the structure's natural frequency to induce antiresonance |
[12] | |
| RL Circuit in parallel | 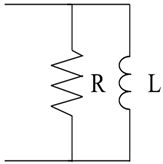 |
Passive control Single-mode |
[17] | |
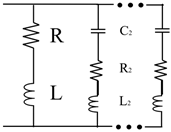
| parallelRLC Circuit in series |
|
Passive control Multi-mode |
[105] | |
| Series RLC circuit in parallel |
|
|
Passive control Multi-mode |
[39] |
3.2. Distributed-Parameter Systems
In this section, we develop a mathematical model for a continuous system connected to a piezoelectric shunt circuit. The model describes the multi-modal electromechanical behaviour of the system. The approach presented here can be extended to one-dimensional and two-dimensional structures such as beams and plates with general boundary conditions. The model accounts for the geometric and inertia nonlinearities arising from the characteristics of the structure. Without loss of generality, we consider an Euler Bernoulli cantilever beam with an RL shunt circuit in series. The nonlinear planar vibration of a cantilever beam is given by Arafat et al. [106] as follows:
where is the displacement of the beam; and are the density of the beam, modulus of elasticity, cross-sectional area, and second moment of inertia of the beam, respectively; is the amplitude of the applied harmonic force and is its frequency; and is the spatial coordinate along the length of the beam and is time. The first nonlinear term in Eq. (9) is the inertia nonlinearity and the second term is the geometric nonlinearity.
Introducing a nondimensional spatial coordinate such that and solving the linear-free vibration problem yields the following mode shapes and natural frequencies:
where the constants are frequency coefficients governed by the following characteristic equation:
Moreover, the mode shapes satisfy the following orthogonality conditions:
The Galerkin’s method is used to discretize the governing partial-differential equation, Eq. (1), into a set of ordinary-differential equations. Therefore, we let the displacement be discretized as follows:
where are the linear vibration mode shapes, are generalized coordinates to be determined, and is the number of modes retained in the discretization. Following the Galerkin’s method, by substituting Eq. (8) into Eq. (1), multiplying the resulting equation by the mode shape , integrating over the domain from 0 to 1, adding modal damping, and noting the orthogonality conditions and the nondimensional spatial coordinate, we obtain the discretized equations as
where
The first nonlinear term in Eq. (9) represents to the inertia nonlinearity and the second term represents the geometric nonlinearity due to the relatively large deformation. The magnitude of the inertia nonlinearity is found to be very small compared with the geometric nonlinearity for the first few modes; hence, it will be neglected in this study. Therefore, discretized equation reduces to
To mitigate the vibration of the beam by a shunt circuit, the coupling between the beam, piezoelectric patch, and the circuit is considered. Following the formulation of lumped systems attached with shunted circuits by Lossouarn et al. [86] and Shami et al. [100,101], Al-Souqi et al. [102], and Kadri et al. [107] developed the coupled equations of the cantilever beam and a passive shunt circuit is derived. The equations represent the beam, piezoelectric patch, and the circuit are, respectively, given as
where is the electromechanical coupling coefficient associated with mode , is the capacitance of the piezoelectric patch, and and represent the voltage and electrical charges respectively. The capacitance is a function of the geometry and the material of the piezoelectric patch defined by Eq. (3)
The electromechanical coupling coefficient is a mode-shape and material dependent variable defined by the following equation [33]:
where is the Heaviside function to locate the covered area by the piezoelectric patch. and are the elastic modulus of the piezoelectric material and the charge coefficient. Moreover, L and R are the inductance and resistance values of the RL shunt circuit. After mathematical manipulation, the voltage in Eq. (14b) is substituted into Eqs. (14a) and (14c) to couple the shunt circuit directly to the structure and optimizing the circuit elements and studying their contribution to vibration suppression. The coupled governing equations are expressed as follows:
where the electrical natural frequency and damping ratio are defined as
By applying a frequency sweep, a frequency response plot around the first two modes is obtained as shown in Fig. 8. The location of the PZT patch on the beam’s root, middle, or tip was found to be significant, as shown in Fig. 9. Multiple modes are controlled by using current blocking circuits [107].
Figure 9.
Frequency-response plots of the beam’s tip point without and with a shunt circuit absorber located at the beam’s root, middle, and tip [107].
Figure 9.
Frequency-response plots of the beam’s tip point without and with a shunt circuit absorber located at the beam’s root, middle, and tip [107].

3.3. Inducing Internal Resonances into the System
The internal resonance depends on the coupling between two modes whose frequency ratio is an integer. To introduce a 2:1 internal resonance, the modes should have a quadratically nonlinear coupling. Nonlinearity can be induced in active systems by quadratic feedback and control signals [97]. Also, nonlinearity can be induced in passive and semi-active systems by using nonlinear electrical components such as nonlinear capacitors in which its capacitance depends inversely on the amplitude of the charge. The implementation of the nonlinear capacitor to the shunt circuit can be represented as
where Eq. (21b) becomes
By performing the nondimensionalizing and the electro-mechanical modal expansion as demonstrated in [105], the system of equation representing the system in the modal coordinates is given as
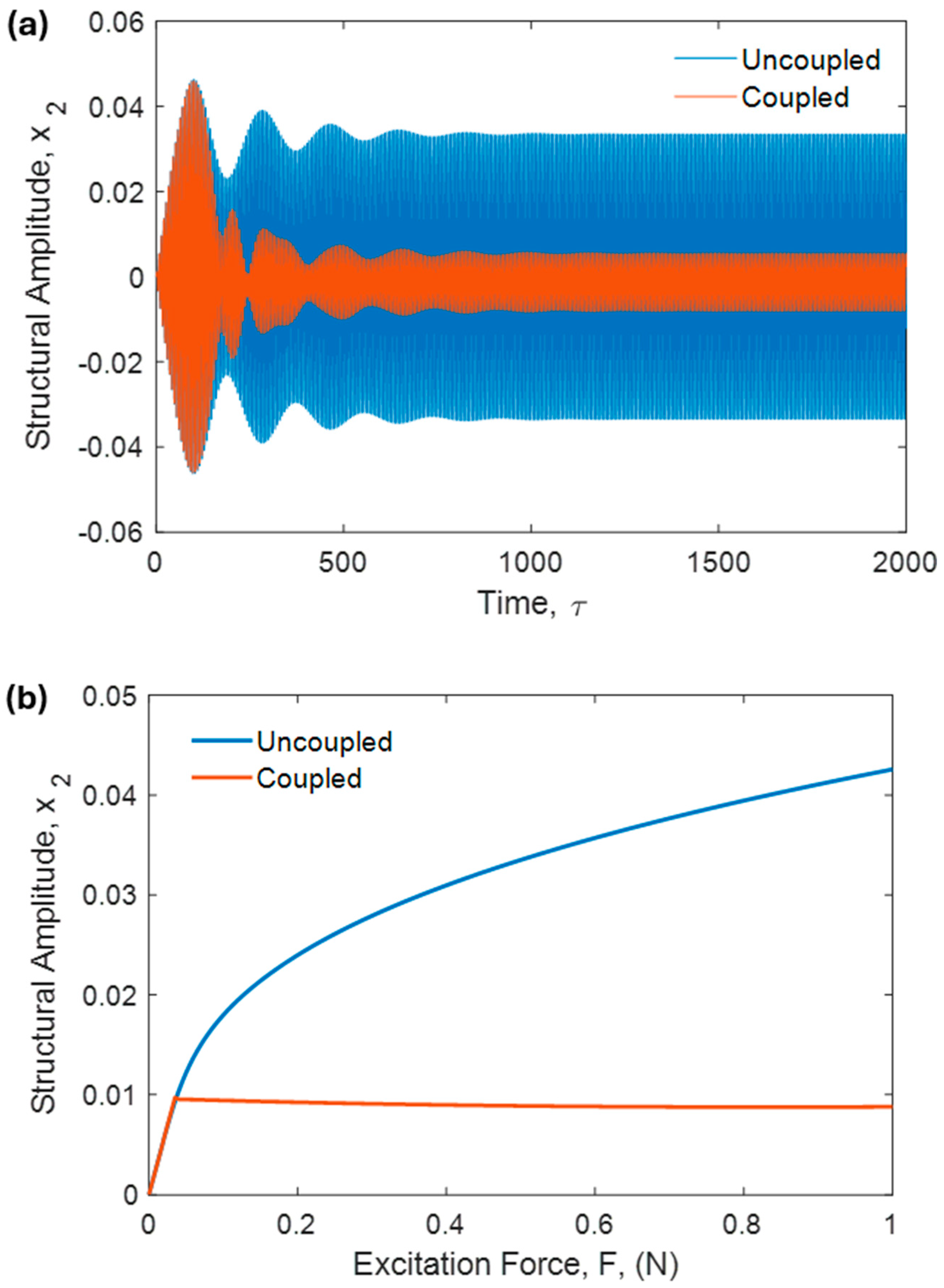
Numerically simulating the system of equations, Al-Souqi et al. [102] found the amplitude-force response and the time history of the host beam and the absorber as shown in Figs, 10 and 11, respectively. It is evident that tuning the absorber’s frequency to achieve the 2:1 internal resonance is efficient to suppress the beam’s vibration via the saturation phenomenon and transfer the energy to the absorber, [102]. Taking the geometric nonlinearity into account, the tuned absorber proves to be effective in suppressing the nonlinear vibration, as shown in Fig. 12.
Figure 10.
The force-response plots for the modal coordinates and , [102].
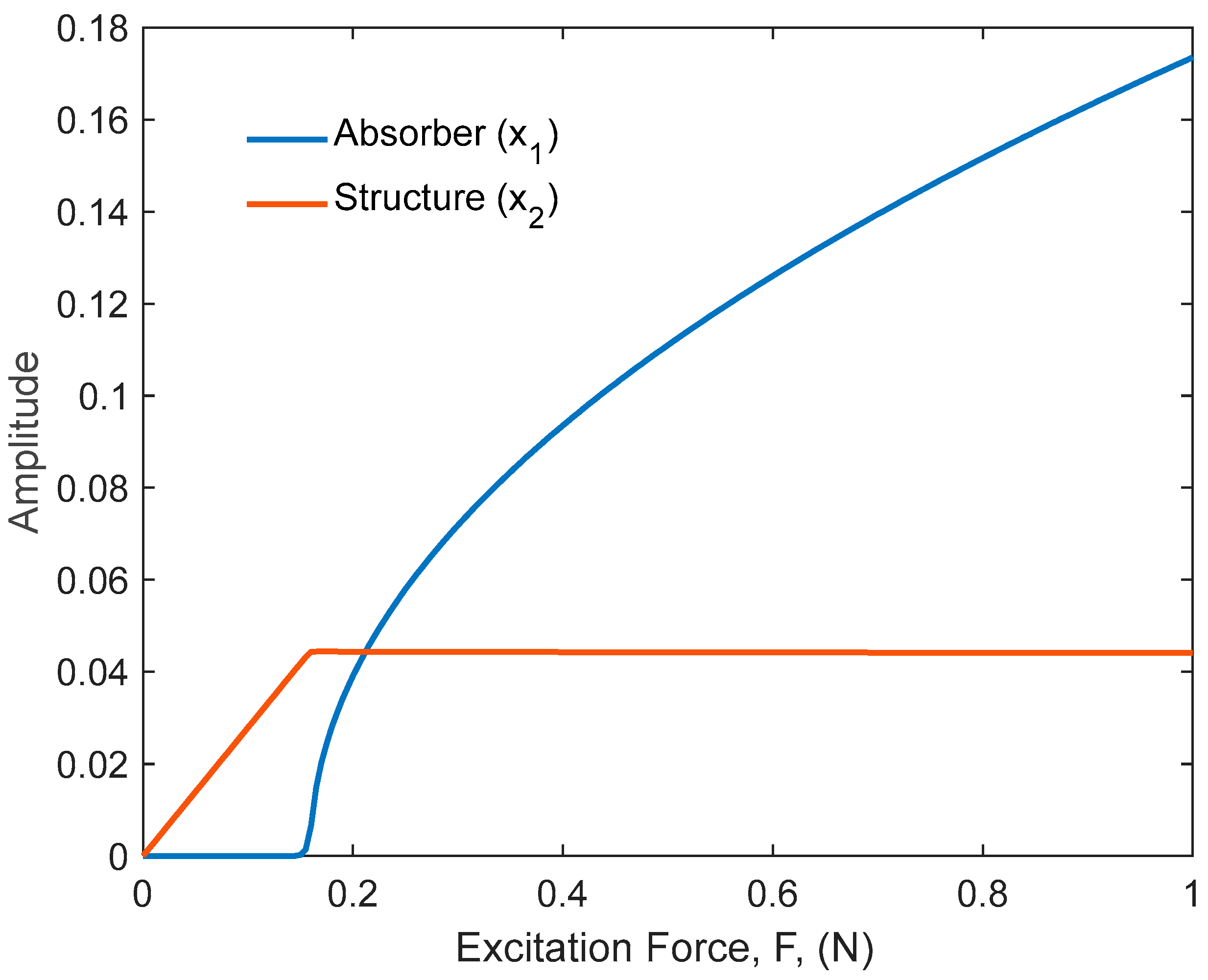
Figure 11.
Figure 11. The time response for the modal coordinates and , [102].
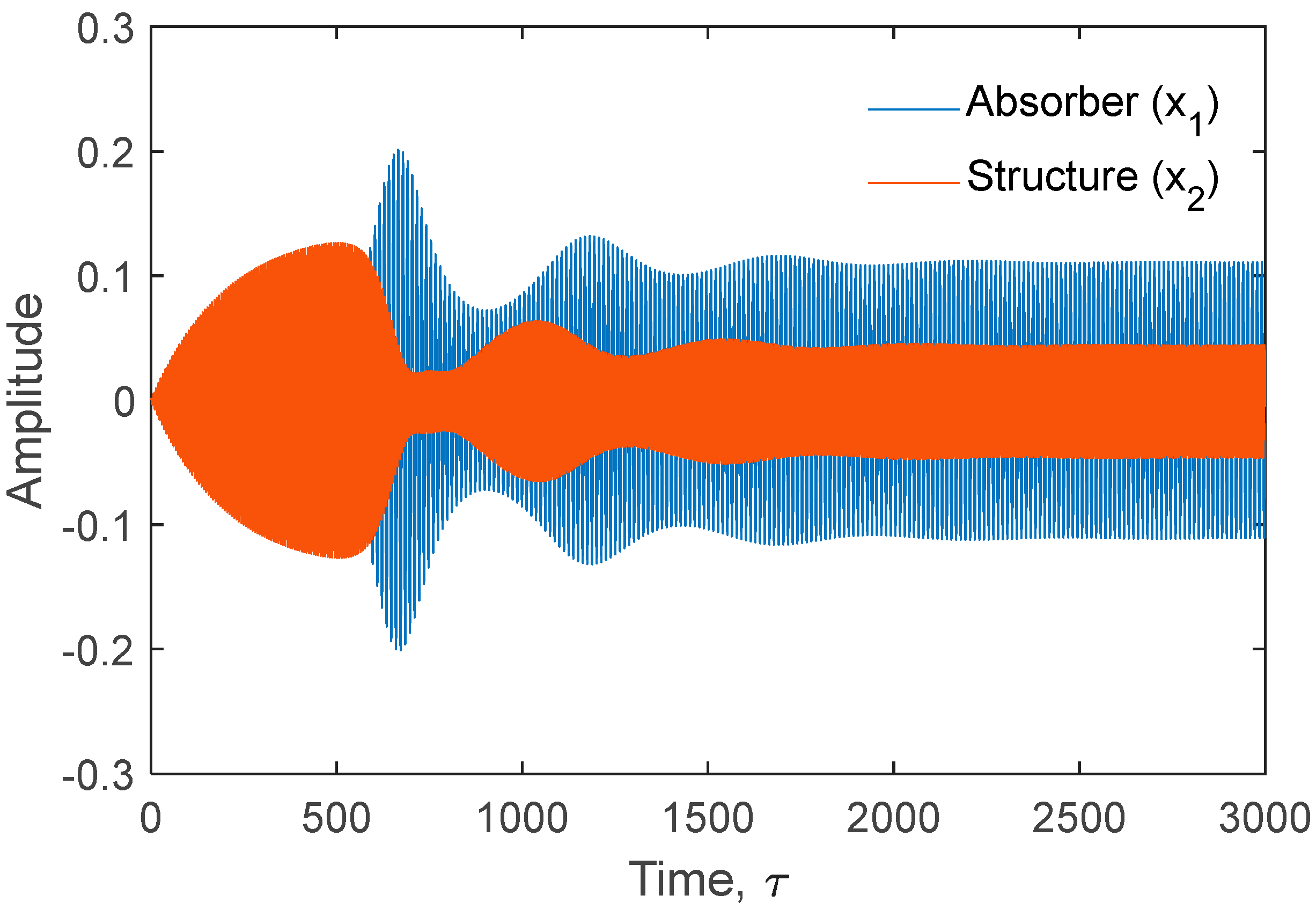
Figure 12.
The nonlinear response of the uncoupled and coupled beam: (a) time history and (b) the force response, [102].
Figure 12.
The nonlinear response of the uncoupled and coupled beam: (a) time history and (b) the force response, [102].
4. Conclusions and Future Work
Piezoelectric shunt circuits have proven to be an effective and versatile method for vibration suppression, with applications spanning structural control, noise reduction, and specific industrial systems. Recent developments in semi-active systems, multi-mode circuits, and energy harvesting have enhanced their adaptability and efficiency. However, challenges like large capacitor issues and the need for adaptive systems highlight areas for future research, promising further advancements in sustainable and intelligent vibration control technologies. Piezoelectric shunt circuits are a passive or semi-active method to reduce vibrations in structures by using piezoelectric materials. These materials generate electricity when mechanically stressed, and the shunt circuit dissipates this energy, damping vibrations. This technology is widely used in engineering to improve performance and reduce noise, with applications in beams, plates, and complex systems like helicopter rotor blades. There are several types of shunt circuits, each with specific uses: resistive (R) shunt that is simple, effective for single-mode damping, like in basic structural beams; resonant (RL) shunt that includes a resistor and inductor, tuned for multi-mode damping, used in panels and machinery; negative capacitance shunt that is applied in advanced noise control systems. While resonant shunts excel at targeted damping, emerging broadband and adaptive techniques promise greater flexibility. Continued innovation in circuit design and materials will likely expand their adoption across industries, making them a cornerstone of modern vibration mitigation strategies.
Recent papers explore optimizing the placement and geometry of the patch. Key areas of study include the strategic placement and geometric configuration of the piezoelectric patches to maximize efficiency. Additionally, researchers have explored advanced methods to control nonlinear structures, such as leveraging the system's internal resonances or incorporating a negative inductor to enhance performance. These approaches aim to address challenges associated with nonlinear vibrations, which are often more complex and difficult to manage than linear ones. Another significant area of exploration has been the development of techniques to control multiple vibration modes simultaneously. This is particularly important for systems that exhibit complex dynamic behaviors across a range of frequencies. Recent studies have also presented refined mathematical models, including the discretization of continuous systems, to better understand and predict the behavior of nonlinear structures. The field is poised for growth with advances in miniaturization, smart materials, and energy harvesting. Integrating piezoelectric shunts with IoT for real-time monitoring and tuning could bridge the gap between passive and active control. Additionally, combining shunts with energy harvesting circuits could power sensors, creating self-sustaining systems. Challenges remain in scaling for large structures and improving robustness against environmental variations.
References
- J.A.B. Gripp and D.A. Rade, Vibration and noise control using shunted piezoelectric transducers: A review, Mechanical Systems and Signal Processing, vol. 112, pp. 359-383, 2018.
- Marakakis, Georgios K. Tairidis, Panagiotis Koutsianitis and Georgios E. Stavroulakis, Shunt Piezoelectric Systems for Noise and Vibration Control: A Review, Konstantinos, Frontiers in Built Environment, vol. 5, Article 64, 2019.
- H. A. Sodano, D. J. H. A. Sodano, D. J. Inman and G. Park, "A review of power harvesting from vibration using piezoelectric materials," Shock Vib Dig, vol. 36, (3), pp. 197–206, 2004.
- M. Zhu, Q. M. Zhu, Q. Shi, T. He, Z. Yi, Y. Ma, B. Yang, T. Chen, and C. Lee, "Self-Powered and Self-Functional Cotton Sock Using Piezoelectric and Triboelectric Hybrid Mechanism for Healthcare and Sports Monitoring," ACS Nano, vol. 13, (2), pp. 1940–1952, 2019. [CrossRef]
- W. Deng, Z. W. Deng, Z. Yihao, A. Libanori, G. Chen, W. Yang, and J. Chen, "Piezoelectric nanogenerators for personalized healthcare," Chem. Soc. Rev., vol. 51, (9), pp. 3380–3435, 2022. [CrossRef]
- Erturk and D., J. Inman, Piezoelectric Energy Harvesting. 2011.
- H. S. Tzou and C. I. Tseng, "Distributed piezoelectric sensor/actuator design for dynamic measurement/control of distributed parameter systems: a piezoelectric finite element approach," J. Sound Vibrat., vol. 138, (1), pp. 17–34, 1990.
- R. L. Forward, "Electronic damping of vibrations in optical structures," Appl. Opt., vol. 18, (5), pp. 690–697, 1979. Available: https://opg.optica.org/ao/abstract.cfm?URI=ao-18-5-690. [CrossRef]
- D. D. L. Chung, "Review: Materials for vibration damping," J. Mater. Sci., vol. 36, (24), pp. 5733–5737, 2001. [CrossRef]
- H. Ji, J. H. Ji, J. Qiu, Y. Wu, and C. Zhang, "Semi-active vibration control based on synchronously switched piezoelectric actuators," Int. J. Appl. Electromagn. Mech., vol. 59, pp. 299–307, 2019. [CrossRef]
- Baz, "Vibration Damping," pp. 1–10, 2018. [CrossRef]
- N. W. Hagood and A. von Flotow, "Damping of structural vibrations with piezoelectric materials and passive electrical networks," J. Sound Vibrat., vol. 146, (2), pp. 243–268, 1991. Available: https://www.sciencedirect.com/science/article/pii/0022460X91907629. [CrossRef]
- Thomas, J. Ducarne and J. Deü, "Performance of piezoelectric shunts for vibration reduction," Smart Mater. Struct., vol. 21, (1), pp. 015008, 2011.
- K. Yamada, "Complete passive vibration suppression using multi-layered piezoelectric element, inductor, and resistor," J. Sound Vibrat., vol. 387, pp. 16–35, 2017. Available: https://www.sciencedirect.com/science/article/pii/S0022460X16305417. [CrossRef]
- B. Lossouarn et al, "Design of inductors with high inductance values for resonant piezoelectric damping," Sensors and Actuators A: Physical, vol. 259, pp. 68–76, 2017. Available: https://www.sciencedirect.com/science/article/pii/S0924424716309785. [CrossRef]
- H. Park, "Dynamics modelling of beams with shunt piezoelectric elements," J. Sound Vibrat., vol. 268, (1), pp. 115–129, 2003. Available: https://www.sciencedirect.com/science/article/pii/S0022460X02014918. [CrossRef]
- S. Wu, "Piezoelectric shunts with a parallel RL circuit for structural damping and vibration control," in Smart Structures and Materials 1996: Passive Damping and Isolation, 1996.
- R. Darleux, B. R. Darleux, B. Lossouarn and J. Deü, "Passive self-tuning inductor for piezoelectric shunt damping considering temperature variations," J. Sound Vibrat., vol. 432, pp. 105–118, 2018.
- L. Pernod et al, "Vibration damping of marine lifting surfaces with resonant piezoelectric shunts," J. Sound Vibrat., vol. 496, pp. 115921, 2021.
- X. Liu et al, "Improving aeroelastic stability of bladed disks with topologically optimized piezoelectric materials and intentionally mistuned shunt capacitance," Materials, vol. 15, (4), pp. 1309, 2022.
- Y. G. Wu et al, "Design of dry friction and piezoelectric hybrid ring dampers for integrally bladed disks based on complex nonlinear modes," Comput. Struct., vol. 233, pp. 106237, 2020.
- M. Morad, M. M. Morad, M. Kamel and M. K. Khalil, "Vibration damping of aircraft propeller blades using shunt piezoelectric transducers," in IOP Conference Series: Materials Science and Engineering, 2021.
- Wang, G. Yao and M. Liu, "Passive vibration control of subsonic thin plate via nonlinear capacitance and negative capacitance coupled piezoelectric shunt damping," Thin-Walled Structures, vol. 198, pp. 111656, 2024.
- K. Yamada et al, "Optimum tuning of series and parallel LR circuits for passive vibration suppression using piezoelectric elements," J. Sound Vibrat., vol. 329, (24), pp. 5036–5057, 2010. Available: https://www.sciencedirect.com/science/article/pii/S0022460X10004116. [CrossRef]
- G. K. Rodrigues et al, "Piezoelectric patch vibration control unit connected to a self-tuning RL-shunt set to maximise electric power absorption," J. Sound Vibrat., vol. 536, pp. 117154, 2022.
- C. Sugino, M. C. Sugino, M. Ruzzene and A. Erturk, "Design and analysis of piezoelectric metamaterial beams with synthetic impedance shunt circuits," IEEE/ASME Transactions on Mechatronics, vol. 23, (5), pp. 2144–2155, 2018.
- T. Ikegame, K. T. Ikegame, K. Takagi and T. Inoue, "Exact solutions to H∞ and H2 optimizations of passive resonant shunt circuit for electromagnetic or piezoelectric shunt damper," Journal of Vibration and Acoustics, vol. 141, (3), pp. 031015, 2019.
- S. Dai, Y. S. Dai, Y. Zheng and Y. Qu, "Programmable piezoelectric meta-rings with high-order digital circuits for suppressing structural and acoustic responses," Mechanical Systems and Signal Processing, vol. 200, pp. 110517, 2023.
- Heuss et al, "Tuning of a vibration absorber with shunt piezoelectric transducers," Arch Appl Mech, vol. 86, pp. 1715–1732, 2016.
- V. P. Matveenko et al, "An approach to determination of shunt circuits parameters for damping vibrations," International Journal of Smart and Nano Materials, vol. 9, (2), pp. 135–149, 2018.
- J. F. Toftekær, A. J. F. Toftekær, A. Benjeddou and J. Høgsberg, "General numerical implementation of a new piezoelectric shunt tuning method based on the effective electromechanical coupling coefficient," Mechanics of Advanced Materials and Structures, vol. 27, (22), pp. 1908–1922, 2020.
- P. Gardonio et al, "Extremum seeking online tuning of a piezoelectric vibration absorber based on the maximisation of the shunt electric power absorption," Mechanical Systems and Signal Processing, vol. 176, pp. 109171, 2022.
- J. Jeon, "Passive vibration damping enhancement of piezoelectric shunt damping system using optimization approach," J Mech Sci Technol, vol. 23, (5), pp. 1435–1445, 2009. Available: https://link.springer.com/article/10.1007/s12206-009-0402-8. [CrossRef]
- J. Jeon, "Passive acoustic radiation control for a vibrating panel with piezoelectric shunt damping circuit using particle swarm optimization algorithm," Journal of Mechanical Science and Technology, vol. 23, pp. 1446–1455, 2009.
- N. Wahid, A. G. N. Wahid, A. G. Muthalif and K. A. Nor, "Investigating negative capacitance shunt circuit for broadband vibration damping and utilizing ACO for optimization," Int.J.Circuits Electron, vol. 1, pp. 168–173, 2016.
- G. Caruso, "A critical analysis of electric shunt circuits employed in piezoelectric passive vibration damping," Smart Mater. Struct., vol. 10, (5), pp. 1059, 2001.
- P. Soltani et al, "Piezoelectric vibration damping using resonant shunt circuits: an exact solution," Smart Mater. Struct., vol. 23, (12), pp. 125014, 2014.
- S. Wu, "Method for multiple-mode shunt damping of structural vibration using a single PZT transducer," in Smart Structures and Materials 1998: Passive Damping and Isolation, 1998.
- J. J. Hollkamp, "Multimodal passive vibration suppression with piezoelectric materials and resonant shunts," J Intell Mater Syst Struct, vol. 5, (1), pp. 49–57, 1994.
- S. Wu, "Method for multiple mode piezoelectric shunting with single PZT transducer for vibration control," J Intell Mater Syst Struct, vol. 9, (12), pp. 991–998, 1998.
- S. Behrens, A. J. S. Behrens, A. J. Fleming and S. Moheimani, "A broadband controller for shunt piezoelectric damping of structural vibration," Smart Mater. Struct., vol. 12, (1), pp. 18, 2003.
- S. Behrens, S. R. S. Behrens, S. R. Moheimani and A. J. Fleming, "Multiple mode current flowing passive piezoelectric shunt controller," J. Sound Vibrat., vol. 266, (5), pp. 929–942, 2003.
- F. dell’Isola, C. F. dell’Isola, C. Maurini and M. Porfiri, "Passive damping of beam vibrations through distributed electric networks and piezoelectric transducers: prototype design and experimental validation," Smart Mater. Struct., vol. 13, (2), pp. 299, 2004.
- J. Fleming and S. R. Moheimani, "Control orientated synthesis of high-performance piezoelectric shunt impedances for structural vibration control," IEEE Trans. Control Syst. Technol., vol. 13, (1), pp. 98–112, 2004.
- G. K. Tairidis, "Vibration control of smart composite structures using shunt piezoelectric systems and neuro-fuzzy techniques," J. Vibrat. Control, vol. 25, (18), pp. 2397–2408, 2019.
- G. Raze, A. G. Raze, A. Paknejad, G. Zhao, C. Collette, and G. Kerschen, "Multimodal vibration damping using a simplified current blocking shunt circuit," J Intell Mater Syst Struct, vol. 31, (14), pp. 1731–1747, 2020.
- G. Raze, J. G. Raze, J. Dietrich and G. Kerschen, "Passive control of multiple structural resonances with piezoelectric vibration absorbers," J. Sound Vibrat., vol. 515, pp. 116490, 2021.
- L. P. Ribeiro and A. M. G. de Lima, "Robust passive control methodology and aeroelastic behavior of composite panels with multimodal shunt piezoceramics in parallel," Composite Structures, vol. 262, pp. 113348, 2021.
- G. A. Lesieutre, "Vibration damping and control using shunt piezoelectric materials," Shock Vib Dig, vol. 30, (3), pp. 187–195, 1998.
- Tylikowski, "Control of circular plate vibrations via piezoelectric actuators shunt with a capacitive circuit," Thin-Walled Structures, vol. 39, (1), pp. 83–94, 2001.
- H. Park, K. H. Park, K. Kabeya and D. J. Inman, "Enhanced piezoelectric shunt design," in ASME International Mechanical Engineering Congress and Exposition, 1998,.
- H. Park and D. J. Inman, "Enhanced piezoelectric shunt design," Shock Vibrat., vol. 10, (2), pp. 127–133, 2003.
- M. Berardengo et al, "LRLC-shunt piezoelectric vibration absorber," J. Sound Vibrat., vol. 474, pp. 115268, 2020.
- C. H. Park and H. C. Park, "Multiple-mode structural vibration control using negative capacitive shunt damping," KSME International Journal, vol. 17, pp. 1650–1658, 2003.
- K. Billon, N. K. Billon, N. Montcoudiol, A. Aubry, R. Pascual, F. Mosco, F. Jean, C. Pezerat, C. Bricault, and S. Chesne, "Vibration isolation and damping using a piezoelectric flextensional suspension with a negative capacitance shunt," Mechanical Systems and Signal Processing, vol. 140, pp. 106696, 2020.
- M. Pohl, "An adaptive negative capacitance circuit for enhanced performance and robustness of piezoelectric shunt damping," J Intell Mater Syst Struct, vol. 28, (19), pp. 2633–2650, 2017.
- M. Berardengo, S. M. Berardengo, S. Manzoni, O. Thomas, C. Giraud-Audine, L. Drago, S. Marelli, M. Vanali, "The reduction of operational amplifier electrical outputs to improve piezoelectric shunts with negative capacitance," J. Sound Vibrat., vol. 506, pp. 116163, 2021.
- T. Wang, J. T. Wang, J. Dupont and J. Tang, "On integration of vibration suppression and energy harvesting through piezoelectric shunting with negative capacitance," IEEE/ASME Transactions on Mechatronics, vol. 28, (5), pp. 2621–2632, 2023.
- Y. G. Wu, H. Y. G. Wu, H. Wang, Y. Fan, L. Li, "On the network of synchronized switch damping for blisks," Mechanical Systems and Signal Processing, vol. 184, pp. 109695, 2023.
- G. D. Larson, The Analysis and Realization of a State-Switched Acoustic Transducer. 1996.
- C. Richard et al, "Semi-passive damping using continuous switching of a piezoelectric device," in Smart Structures and Materials 1999: Passive Damping and Isolation, 1999,.
- C. Richard, D. C. Richard, D. Guyomar, D. Audigier, H. Bassaler, "Enhanced semi-passive damping using continuous switching of a piezoelectric device on an inductor," in Smart Structures and Materials 2000: Damping and Isolation, 2000,.
- W. W. Clark, "Semi-active vibration control with piezoelectric materials as variable-stiffness actuators," in Smart Structures and Materials 1999: Passive Damping and Isolation, 1999,.
- W. W. Clark, "Vibration control with state-switched piezoelectric materials," J Intell Mater Syst Struct, vol. 11, (4), pp. 263–271, 2000.
- Y. Wu, L. Y. Wu, L. Li, Y. Fan, J. Liu, Q. Gao, "A linearised analysis for structures with synchronized switch damping," IEEE Access, vol. 7, pp. 133668–133685, 2019.
- J. Liu, L. J. Liu, L. Li and Y. Fan, "A comparison between the friction and piezoelectric synchronized switch dampers for blisks," J Intell Mater Syst Struct, vol. 29, (12), pp. 2693–2705, 2018.
- R. Qi, L. R. Qi, L. Wang, J. Jin, L. Yuan, D. Zhang, Y. Ge, "Enhanced Semi-active piezoelectric vibration control method with shunt circuit by energy dissipations switching," Mechanical Systems and Signal Processing, vol. 201, pp. 110671, 2023.
- D. Guyomar, C. D. Guyomar, C. Richard and L. Petit, "Non-linear system for vibration damping," in 142th Meeting of Acoustical Society of America, 2001,.
- L. R. Corr and W. W. Clark, "A novel semi-active multi-modal vibration control law for a piezoceramic actuator," J.Vib.Acoust., vol. 125, (2), pp. 214–222, 2003.
- H. Ji, J. H. Ji, J. Qiu, and K. Zhu, "Semi-active vibration control of a composite beam using an adaptive SSDV approach," J Intell Mater Syst Struct, vol. 20, (4), pp. 401–412, 2009.
- C. R. Kelley and J. L. Kauffman, "Adaptive synchronized switch damping on an inductor: a self-tuning switching law," Smart Mater. Struct., vol. 26, (3), pp. 035032, 2017.
- F. Yu et al, "Mechanism of interconnected synchronized switch damping for vibration control of blades," Chinese Journal of Aeronautics, vol. 36, (8), pp. 207–228, 2023.
- L. Petit et al, "A broadband semi passive piezoelectric technique for structural damping," in Smart Structures and Materials 2004: Damping and Isolation, 2004,.
- E. Lefeuvre et al, "Semi-passive piezoelectric structural damping by synchronized switching on voltage sources," J Intell Mater Syst Struct, vol. 17, (8-9), pp. 653–660, 2006.
- Faiz et al, "Wave transmission reduction by a piezoelectric semi-passive technique," Sensors and Actuators A: Physical, vol. 128, (2), pp. 230–237, 2006.
- Badel et al, "Piezoelectric vibration control by synchronized switching on adaptive voltage sources: Towards wideband semi-active damping," J. Acoust. Soc. Am., vol. 119, (5), pp. 2815–2825, 2006.
- Bao and, W. Tang, "Semi-active vibration control featuring a self-sensing SSDV approach," Measurement, vol. 104, pp. 192–203, 2017.
- L. Zheng et al, "Semi-active vibration control of the motorized spindle using a self-powered SSDV technique: simulation and experimental study," Automatika: Časopis Za Automatiku, Mjerenje, Elektroniku, Računarstvo i Komunikacije, vol. 63, (3), pp. 511–524, 2022.
- H. Ji et al, "Application of a negative capacitance circuit in synchronized switch damping techniques for vibration suppression," 2011.
- J. Cheng et al, "Semi-active vibration suppression by a novel synchronized switch circuit with negative capacitance," Int. J. Appl. Electromagn. Mech., vol. 37, (4), pp. 291–308, 2011.
- W. Tang et al, "Design and experimental analysis of self-sensing SSDNC technique for semi-active vibration control," Smart Mater. Struct., vol. 27, (8), pp. 085028, 2018.
- H. Ji et al, "A new design of unsymmetrical shunt circuit with negative capacitance for enhanced vibration control," Mechanical Systems and Signal Processing, vol. 155, pp. 107576, 2021.
- G. S. Agnes and D. J. Inman, "Nonlinear piezoelectric vibration absorbers," Smart Mater. Struct., vol. 5, (5), pp. 704, 1996.
- P. Soltani and G. Kerschen, "The nonlinear piezoelectric tuned vibration absorber," Smart Mater. Struct., vol. 24, (7), pp. 075015, 2015.
- Lossouarn, J. Deü and G. Kerschen, "A fully passive nonlinear piezoelectric vibration absorber," Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, vol. 376, (2127), pp. 20170142, 2018.
- B. Lossouarn, G. Kerschen and J. Deü, "An analogue twin for piezoelectric vibration damping of multiple nonlinear resonances," J. Sound Vibrat., vol. 511, pp. 116323, 2021.
- G. Raze et al, "A digital nonlinear piezoelectric tuned vibration absorber," Smart Mater. Struct., vol. 29, (1), pp. 015007, 2019.
- Alfahmi, C. Sugino and A. Erturk, "Duffing-type digitally programmable nonlinear synthetic inductance for piezoelectric structures," Smart Mater. Struct., vol. 31, (9), pp. 095044, 2022.
- Alfahmi and, A. Erturk, "Programmable hardening and softening cubic inductive shunts for piezoelectric structures: Harmonic balance analysis and experiments," J. Sound Vibrat., vol. 571, pp. 118029, 2024.
- X. F. Geng, H. Ding, J. C. Ji, K. X. Wei, X. J. Jing, L. Q. Chen, ”A state-of-the-art review on the dynamic design of nonlinear energy sinks, Eng. Struct., vol. 313, 118228, 2024.
- R. Viguié, G. Kerschen and M. Ruzzene, "Exploration of nonlinear shunting strategies as effective vibration absorbers," in Active and Passive Smart Structures and Integrated Systems 2009, 2009.
- B. Zhou, F. Thouverez and D. Lenoir, "Essentially nonlinear piezoelectric shunt circuits applied to mistuned bladed disks," J. Sound Vibrat., vol. 333, (9), pp. 2520–2542, 2014.
- T. M. Silva et al, "An experimentally validated piezoelectric nonlinear energy sink for wideband vibration attenuation," J. Sound Vibrat., vol. 437, pp. 68–78, 2018.
- K. Dekemele, C. Giraud-Audine and O. Thomas, "A piezoelectric nonlinear energy sink shunt for vibration damping," Mechanical Systems and Signal Processing, vol. 220, pp. 111615, 2024.
- K. Zhou and Z. Hu, "Vibration suppression on the composite laminated plates subjected to aerodynamic and harmonic excitations based on the nonlinear piezoelectric shunt damping," Appl. Math. Model., vol. 121, pp. 134–165, 2023.
- F. Mangussi and D. H. Zanette, "Internal resonance in a vibrating beam: a zoo of nonlinear resonance peaks," PloS One, vol. 11, (9), pp. e0162365, 2016.
- H. Nayfeh, D. T. Mook and L. R. Marshall, "Nonlinear coupling of pitch and roll modes in ship motions," Journal of Hydronautics, vol. 7, (4), pp. 145–152, 1973.
- Z. A. Shami, C. Giraud-Audine and O. "A nonlinear piezoelectric shunt absorber with 2: 1 internal resonance: experimental proof of concept," Smart Mater. Struct., vol. 31, (3), pp. 035006, 2022.
- Z. A. Shami, C. Giraud-Audine and O. Thomas, "A nonlinear piezoelectric shunt absorber with a 2: 1 internal resonance: theory," Mechanical Systems and Signal Processing, vol. 170, pp. 108768, 2022.
- Z. A. Shami et al, "Nonlinear dynamics of coupled oscillators in 1: 2 internal resonance: effects of the non-resonant quadratic terms and recovery of the saturation effect," Meccanica, vol. 57, (11), pp. 2701–2731, 2022.
- Z. A. Shami, C. Giraud-Audine and O. Thomas, "Saturation correction for a piezoelectric shunt absorber based on 2: 1 internal resonance using a cubic nonlinearity," Smart Mater. Struct., vol. 32, (5), pp. 055024, 2023.
- K. Al-Souqi, Exploiting the internal resonance in shunted-circuit based vibration suppression, MS Thesis, American University of Sharjah, Sharjah, UAE, 2024.
- N. Hagood, W. Chung, A. von Flotow, Modeling of piezoelectric actuator dynamics for active structural control, J. of Int. Mat. Sys. and Str., vol. 1, pp. 327–354, 1990.
- Thomas, J. F. Deü, and J. Ducarne, “Vibrations of an elastic structure with shunted piezoelectric patches: efficient finite element formulation and electromechanical coupling coefficients,” Int. J. for N. M. in Eng, vol. 80 (2), pp. 235-268, 2009.
- J. Fleming, S. Behrens and S. Moheimani, "Reducing the inductance requirements of piezoelectric shunt damping systems," Smart Mater. Struct., vol. 12, (1), pp. 57, 2003.
- H.N. Arafat, A.H. Nayfeh and C.M. Chin, '"Nonlinear nonplanar dynamics of parametrically excited cantilever beams," Nonlinear dynamics, vol. 15, no. 1, Jan 1, pp. 31–61.
- K. Kadri, Nonlinear multimode vibration attenuation using passive shunt circuits, MS Thesis, American University of Sharjah, Sharjah, UAE, 2024.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



