
Submitted:
01 April 2025
Posted:
01 April 2025
You are already at the latest version
Abstract
Accurately predicting livestock movement is a cornerstone of precision agriculture and UAV-based livestock monitoring, enabling smarter resource management, improved animal welfare, and enhanced productivity. However, the unpredictable and dynamic nature of livestock behavior poses significant challenges for traditional mobility prediction models. This study introduces LSTM-H, a hybrid deep learning model that combines the sequential learning power of Long Short-Term Memory (LSTM) networks with the real-time correction capabilities of Kalman Filters (KF) to enhance livestock movement prediction within UAV-based monitoring frameworks. The results demonstrate that LSTM-H achieves a mean error of just 11.51 meters for the first step and 40.68 meters over a 30-step prediction horizon, outperforming state-of-the-art models by 4.3x to 14.8x. By bridging deep learning and adaptive filtering, LSTM-H not only enhances prediction accuracy but also paves the way for scalable, real-time livestock and UAV monitoring systems with transformative potential for precision agriculture.
Keywords:
livestock monitoring
; AI-driven precision agriculture
; UAV-based tracking
; spatiotemporal forecasting
; deep learning
1. Introduction
The agricultural sector, particularly livestock farming, is undergoing a significant transformation due to the integration of advanced technologies. The ability to monitor and analyze animal movement patterns has become increasingly important, enabling improved livestock management, disease prevention, and optimized resource allocation [1]. As the global demand for meat and animal products is projected to rise by 70 percent over the next 50 years, maximizing efficiency in livestock farming through technological innovations is essential [2]. The advent of unmanned aerial vehicles (UAVs) has sparked innovation in precision agriculture, offering scalable and automated solutions for real-time livestock monitoring [3].
UAVs are particularly well-suited for livestock monitoring due to their flexibility and ability to operate in remote areas. They can function as airborne base stations, collecting data from Internet of Things (IoT) sensor nodes in regions beyond the reach of conventional communication networks. Livestock health monitoring is critical for ensuring animal welfare, improving productivity, and mitigating disease outbreaks. Traditional methods of monitoring large herds over vast areas are often labor-intensive, time-consuming, and prone to human error [4]. UAVs provide a cost-effective and efficient alternative for continuous observation and health assessment [5].
Despite these advantages, deploying UAVs for livestock monitoring presents several challenges. One of the primary obstacles is accurately tracking livestock movements when their exact locations are unknown. UAVs must adapt their flight trajectories dynamically to locate and monitor animals efficiently. This requires advanced predictive models that anticipate livestock mobility patterns to optimize UAV path planning [6]. Additionally, UAVs face technical challenges such as limited battery life, rapid shifts in field of view, and tracking errors caused by sudden animal movements. The effectiveness of UAVs in livestock monitoring relies heavily on predictive models that minimize trajectory deviations while ensuring efficient and adaptive coverage [7,8].
Several mobility prediction models have been developed to address these challenges, including Kalman Filters (KF), Long Short-Term Memory (LSTM) networks, Spatial-Temporal Attentive LSTM (STA-LSTM), and Extended Kalman Filter with Hidden Markov Model (EKF-HMM) [9,10]. Various approaches have been explored to improve prediction accuracy, including integrating hybrid models, refining algorithms, and incorporating additional data sources [11,12]. However, achieving high-precision mobility prediction remains critical for optimizing UAV-assisted livestock monitoring.
To bridge this gap, this study proposes LSTM-H, a hybrid deep learning model that enhances livestock movement prediction accuracy. LSTM-H extends standard LSTM by integrating the sequential learning power of LSTM networks with the real-time correction capabilities of KF. This hybrid approach leverages historical movement data to predict future livestock positions while dynamically adjusting UAV flight trajectories. By improving prediction accuracy, LSTM-H enables UAVs to optimize their movements in real time, conserving energy and increasing monitoring efficiency.
The proposed model is designed to enhance livestock health monitoring by equipping smart UAVs with adaptive mobility prediction capabilities. By combining time series analysis, real-time data collection, image processing, and deep learning, LSTM-H facilitates a robust and responsive monitoring system. UAVs utilizing this model can efficiently integrate predictive analytics with real-time health data gathered from IoT-equipped livestock. Beyond improving livestock monitoring, this research has broader implications for wildlife conservation, environmental surveillance, and disaster response, where real-time adaptive aerial tracking is crucial.
The remainder of this paper is structured as follows. Section 2 reviews existing studies on livestock mobility prediction. Section 3 discusses commonly used livestock movement prediction methods. The proposed hybrid prediction model is detailed in Section 4. Section 5 presents the experimental setup and results. Finally, Section 6 concludes the study.
2. Related Works
This section reviews existing research on mobility prediction for livestock monitoring, focusing on key methodologies and their strengths and limitations. The principles of four dominant mobility prediction models Kalman Filter (KF), Long Short-Term Memory (LSTM), Spatial-Temporal Attentive LSTM (STA-LSTM), and Extended Kalman Filter with Hidden Markov Model (EKF-HMM) are discussed in detail in Section 3.
Effective UAV trajectory planning in livestock health monitoring requires the integration of mobility prediction models to enhance operational efficiency. Accurate predictions of livestock movements and health statuses enable UAVs to dynamically adjust flight paths, prioritizing animals in critical health conditions. This synergy between trajectory planning and mobility prediction ensures optimal resource allocation based on real-time assessments. However, challenges remain in addressing fast-moving UAVs and the dynamic nature of livestock, making precise and timely routing decisions difficult [11].
Several studies have explored predictive models to address the patterns and challenges of livestock mobility. For instance, Nicolas et al. [13] developed gravity models to predict livestock movement patterns considering factors such as supply, demand, and cultural events. Their models achieved moderate to good accuracy in predicting movement links between locations, highlighting the influence of human and sheep populations, as well as the distance between locations, on movement probabilities. In another study, Zhao and Jurdak [14] analyzed high-frequency movement data of grazing cattle using a two-state ’stop-and-move’ mobility model. They discovered that cattle movement patterns exhibit hierarchical structures and scale-invariant waiting times, suggesting complex underlying dynamics in grazing behavior. Suseendran and Balaganesh [15] proposed cattle movement monitoring and location prediction system using the Markov decision process (LPS-MDP). The experimental results from data gathered through the cows’ collars confirmed that LPS-MD minimizes the prediction cost and delay and increases the prediction accuracy.
A study by Bajardi et al. [16] examined livestock infectious disease outbreaks by tracking cattle movement in Italy. Using spatial disease simulations, they identified spreading pathways consistent across various initial conditions, enabling the clustering of outbreak origins and reducing variability in epidemic outcomes. This procedure offers a versatile framework for risk assessment and the design of optimal surveillance systems for specific diseases. In another study, Guo et al. [17] developed a model of animal movement using a Hidden Markov Model (HMM) for state transitions (e.g., relocating, foraging) and a long-term prediction algorithm for movement between “stay” areas. The model, based on real cow movement data, accurately replicated behavior and can be adapted to other species. Nielsen et al. [18] developed algorithms to detect walking and standing in dairy cows using movement sensors on their hind legs, measuring acceleration in three dimensions. Video-recorded behavior was analyzed to validate the algorithms. The best results, with a 10 percent misclassification rate, were achieved using a step count moving average over 3 seconds combined with a 5-second minimum walking rule. The findings demonstrate that walking and standing durations can be estimated with reasonable accuracy, with algorithm choice depending on specific needs.
Although previous studies have advanced livestock movement prediction using different techniques and frameworks, they often fall short in adapting to rapidly changing livestock movements and integrating real-time UAV observations with historical data. Furthermore, most models lack a unified framework that combines prediction with trajectory planning, limiting their applicability in dynamic agricultural settings.
To address these gaps, considering the successful application of LSTM and KF in the UAV mobility prediction domain [9,11,19], this study introduces LSTM-H, a hybrid model that combines LSTM networks with the real-time correction capabilities of KF. LSTM-H leverages historical livestock movement data and synthetic geo-location data from UAV aerial imagery, simulating real-world observations with controlled noise. This integration ensures accurate and adaptive predictions of livestock movements, significantly improving UAV trajectory planning and monitoring efficiency. By combining deep learning with real-time corrections, the proposed LSTM-H model overcomes the limitations of standalone methods, offering a robust solution for livestock monitoring in dynamic and noisy environments.
3. Mobility Prediction Models
The ability to accurately predict livestock movements is a cornerstone of precision agriculture, enabling enhanced monitoring, resource allocation, and health management [20]. Livestock exhibit complex and dynamic behaviors that are influenced by various environmental and physiological factors. These inherent complexities, combined with the challenges of collecting real-world position data, make mobility prediction a non-trivial task.
To address these challenges, several state-of-the-art prediction models have been developed, each leveraging unique methodologies to forecast livestock movements. These models range from statistical filtering techniques to advanced deep learning frameworks. In this study, we evaluate four of the most prominent prediction models in this domain:
- Real-Time Kalman Filter (KF),
- Long Short-Term Memory (LSTM),
- Spatial-Temporal Attentive LSTM (STA-LSTM), and
- Extended Kalman Filter with Hidden Markov Model (EKF-HMM).
In addition, this study introduces the proposed LSTM-Hybrid (LSTM-H) model, which combines the predictive capabilities of LSTM with the real-time adaptability of the KF. This hybrid approach is discussed in detail in Section 4.
In this section, we discuss the core principles, methodologies, and suitability of the aforementioned state-of-the-art models for livestock movement prediction.
3.1. Real-Time Kalman Filter (KF)
The Kalman Filter (KF) developed by Kalman [21] is a statistical filtering method that estimates the state of a dynamic system by combining noisy observations with a mathematical model of the system’s behavior. In the context of livestock movement prediction, the KF operates under a constant velocity motion model, which assumes that livestock movement can be approximated as a linear process over short time intervals.
The KF operates in two main steps:
- Prediction: Using the previous state estimate, the filter predicts the next state based on the system’s motion model:where is the predicted state at time t, A is the state transition matrix, B is the control matrix, and is the control input.
- Correction: The predicted state is corrected using the observed state , which accounts for measurement noise:where is the Kalman Gain, and H is the observation matrix.
The Kalman Gain, , determines the weight given to the observation versus the prediction and is computed as:
where is the error covariance matrix, and R is the observation noise covariance.
By iteratively applying these steps, the KF provides real-time updates of livestock positions, making it suitable for systems with noisy positional data, such as GPS-based observations. However, its reliance on a simplistic constant velocity model limits its ability to capture the complex and non-linear movement patterns typical of livestock.
3.2. Long Short-Term Memory (LSTM)
The Long Short-Term Memory (LSTM) network is a type of recurrent neural network (RNN) designed to learn long-term dependencies in sequential data [22]. Unlike traditional RNNs, LSTMs mitigate the vanishing gradient problem by incorporating memory cells and gating mechanisms, making them particularly well-suited for livestock movement prediction, where historical movement patterns influence future positions.
An LSTM processes sequential data by maintaining a memory cell, , which is updated at each time step t through a combination of three gates:
- Input Gate (): Determines how much of the current input should update the memory cell. It is calculated as:where is the input vector at time t, is the hidden state from the previous time step, and are the weight matrices for the input and recurrent connections, respectively, and is the bias vector. The function represents the sigmoid activation function.
- Forget Gate (): Controls the extent to which the previous memory cell content is retained. It is computed as:where and are the weight matrices for the input and recurrent connections, and is the bias vector.
- Output Gate (): Regulates the output of the memory cell to the hidden state. It is given by:where and are the weight matrices for the input and recurrent connections, and is the bias vector.
The memory cell, , is updated by combining the forget gate’s contribution from the previous memory cell and the input gate’s influence on the new information. The update is computed as:
where is the memory cell from the previous time step, and are the weight matrices for the input and recurrent connections, is the bias vector, and ⊙ represents element-wise multiplication.
Finally, the hidden state, , is computed as:
For livestock movement prediction, the LSTM network processes historical positional data, typically represented as a sequence of coordinates over a fixed time window. The network architecture includes an input layer to accept sequences of livestock positions, one or more LSTM layers to capture temporal dependencies, a fully connected layer to map the hidden state to the output, and a regression layer to minimize the mean squared error (MSE) between the predicted and actual positions. The loss function is defined as:
where and are the actual and predicted positions, respectively, and N is the number of training samples.
The LSTM’s ability to learn from sequential data makes it effective in capturing the temporal patterns in livestock movements. However, it may struggle with real-time adaptability, especially when faced with noisy or sparse observations.
3.3. Spatial-Temporal Attentive LSTM (STA-LSTM)
The Spatial-Temporal Attentive LSTM (STA-LSTM) is an enhancement of the standard LSTM network, designed to focus on both spatial and temporal dependencies in sequential data [23]. While standard LSTMs are effective at modeling temporal patterns, they treat all parts of the sequence equally, which may lead to suboptimal predictions when certain spatial or temporal features are more significant. The STA-LSTM addresses this limitation by incorporating attention mechanisms that dynamically assign weights to important parts of the sequence.
The STA-LSTM introduces an attention layer after the LSTM layer to compute importance scores for each time step in the sequence. These scores are used to adjust the contributions of different parts of the input sequence to the final prediction. Formally, the attention mechanism operates as follows:
- Attention Score Computation: For each time step t, an attention score is computed based on the hidden state of the LSTM and a learnable context vector u:where is a weight matrix, is a bias vector, and T is the total number of time steps in the input sequence.
- Weighted Hidden State: The hidden states are weighted by their corresponding attention scores to compute a context vector c:
- Final Prediction: The context vector c is passed through a fully connected layer and activation function to produce the final prediction:where is the weight matrix, and is the bias vector for the output layer.
In the context of livestock movement prediction, the STA-LSTM processes sequences of coordinates while dynamically identifying and emphasizing important temporal and spatial patterns. The attention mechanism enables the model to focus on key movements or events in the sequence that are most predictive of future positions.
The STA-LSTM architecture comprises an input layer for positional sequences, one or more LSTM layers, an attention layer for computing importance scores, and an output layer for regression. By prioritizing critical information in the sequence, the STA-LSTM enhances the predictive capabilities of the standard LSTM, particularly in scenarios with irregular or non-uniform movement patterns. However, the model’s computational complexity is higher due to the additional attention mechanism, which requires learning extra parameters and performing dynamic computations during inference.
3.4. Extended Kalman Filter with Hidden Markov Model (EKF-HMM)
The Extended Kalman Filter (EKF) combined with a Hidden Markov Model (HMM) is a hybrid approach that leverages statistical filtering for state estimation and probabilistic modeling for behavioral classification [24]. This combination is particularly effective in dynamic systems where the underlying states are influenced by discrete, latent behaviors, such as grazing, walking, or resting in the context of livestock movements.
3.4.1. Extended Kalman Filter (EKF)
The EKF extends the standard Kalman Filter by linearizing the non-linear state transition and observation models using a first-order Taylor expansion. It operates in two main steps:
- Prediction: The next state is predicted based on the non-linear state transition model f:where represents process noise, typically modeled as zero-mean Gaussian noise with covariance Q.
-
Correction: The predicted state is updated using the observed state , based on the non-linear observation model h:where is the Kalman Gain, computed as:Here, is the error covariance matrix, is the Jacobian matrix of h evaluated at , and R is the measurement noise covariance.
The EKF efficiently estimates continuous states, such as position and velocity, while accounting for non-linearities in the system. However, it does not inherently account for behavioral changes that influence these states.
3.4.2. Hidden Markov Model (HMM)
The HMM models the discrete behavioral states influencing livestock movement, such as grazing, walking, or resting. It represents these states as a Markov process with the following components:
- A finite set of hidden states .
- State transition probabilities , where represents the probability of transitioning from state to .
- Observation probabilities , where represents the likelihood of observing given the state .
- An initial state distribution , where .
The HMM classifies the behavioral state at each time step based on observed data, such as changes in acceleration or velocity.
3.4.3. Integration of EKF and HMM
In the EKF-HMM model, the EKF provides continuous state estimates, which are then used as inputs to the HMM for behavioral classification. The HMM refines these estimates by capturing the influence of discrete behavioral states on the continuous dynamics.
For livestock movement prediction, this integrated approach allows the system to simultaneously estimate position and velocity while identifying the underlying behavioral state. However, the EKF-HMM’s reliance on predefined behavioral models and its computational complexity can limit its applicability in scenarios with highly irregular or unpredictable movement patterns. Although the models discussed demonstrate advanced capabilities, they face limitations in handling noisy and dynamic movement patterns. To address these challenges, this study proposes the LSTM-H model, which integrates predictive and corrective approaches for enhanced accuracy.
4. Methodology
The proposed LSTM-hybrid model in this study addresses the limitations of existing prediction models by integrating sequential learning from LSTM networks with real-time correction capabilities of the KF. This section provides an overview of the dataset, the generation of synthetic noisy observations to simulate real-world scenarios, and a detailed explanation of the architecture and workflow of the LSTM-hybrid model.
4.1. Dataset Description
The dataset used in this study comprises GPS movement data for 18 cattle, recorded over 10 days at a sampling rate of 10 samples per second, resulting in millions of data points for each animal [25]. Figure 1 illustrates the movements of a single cattle over a 3-hour duration, with data resampled at 60-second intervals for clarity. Additionally, Figure 2 presents movement heatmaps for cattle IDs 1 to 3 across four different 3-hour time intervals, showcasing their x and y positions within the farm area. Each entry in the dataset contains the following attributes:
- Timestamp: The time at which the livestock position was recorded.
- X-coordinate: The livestock’s horizontal position in meters within the farm boundary.
- Y-coordinate: The livestock’s vertical position in meters within the farm boundary.
- Z-coordinate: The livestock’s altitude, which was excluded as it is irrelevant for monitoring livestock on flat farm terrains.
To optimize computational efficiency and align with practical livestock monitoring requirements, the dataset was resampled to one sample per 60 seconds. This frequency provides a balance between processing speed and prediction accuracy, as livestock health monitoring typically does not require second-by-second updates. The resulting data maintains sufficient resolution for validating the prediction models while reducing computational overhead.
4.2. Synthetic Data Generation
To simulate UAV-based observations, synthetic data was generated by introducing Gaussian noise to the actual coordinates:
where represents Gaussian noise with zero mean and variance . The noise level was set to 5% of the range of the livestock’s coordinates. This approach replicates the inaccuracies commonly associated with UAV-derived geo-location data.
The synthetic data was essential for this study due to the unavailability of a comprehensive real-world dataset that combines wearable GPS data with UAV geo-location observations. By simulating real-time UAV observations, the synthetic data effectively demonstrates how live geo-location updates can enhance prediction accuracy. In practice, as a UAV navigates the farm, it dynamically observes livestock positions and adjusts predicted locations using live data captured during its flight. This dynamic correction ensures more accurate monitoring and provides a framework for future trajectory optimization.
4.3. Proposed LSTM-Hybrid Model
The LSTM-Hybrid Model integrates the predictive capabilities of a Long Short-Term Memory (LSTM) network with the real-time correction capabilities of a Kalman Filter (KF). This hybrid approach addresses the limitations of existing models by leveraging LSTM’s ability to learn temporal dependencies from historical data and the KF’s adaptability to noisy real-time observations.
At each time step, the LSTM predicts the livestock’s next position based on historical positional data. This prediction serves as the initial state estimate for the KF, which refines it using real-time noisy observations, such as those captured by UAVs. The KF operates in two steps:
- Prediction Step: The KF takes the LSTM-predicted position, , and projects it forward based on the system’s motion model:where is the predicted state at time t, A is the state transition matrix, B is the control matrix, and is the control input. In this case, the LSTM prediction acts as the initial input for the KF.
- Correction Step: The KF refines the predicted state by incorporating noisy real-time observations , such as UAV-collected positions:where is the Kalman Gain, H is the observation matrix, and is the observed position. The Kalman Gain, , determines the weight given to the observation versus the prediction and is computed as:where is the error covariance matrix and R is the measurement noise covariance.
The workflow of the LSTM-Hybrid Model is summarized in Algorithm 1:
| Algorithm 1 LSTM-Hybrid Model Workflow |
|
This hybrid framework effectively combines deep learning and statistical filtering for accurate and robust livestock movement prediction. By passing the LSTM’s predictions as input to the Kalman Filter, the model benefits from the temporal learning of the LSTM and the noise-handling and adaptability of the KF. This integration makes the hybrid model particularly well-suited for dynamic and noisy environments.
The methodologies described in this section, including the dataset preparation, synthetic data generation, and the design of the LSTM-Hybrid Model, form the foundation for evaluating and comparing the prediction models. The next section presents the results of this evaluation, highlighting the performance of the proposed hybrid model in comparison to state-of-the-art alternatives.
5. Results
This section presents the evaluation results of the proposed LSTM-H Model alongside the baseline models: LSTM, STA-LSTM, KF, and EKF-HMM. The performance of each model was assessed using the mean prediction errors, visualized through multiple figures, and summarized in Table 2.
5.1. First Step Prediction Accuracy Comparison
Figure 3 compares the actual positions of cattle with the predicted positions using the LSTM model and the proposed LSTM-H model. While the LSTM model captures the general trend of cattle movements, it exhibits a significant prediction error at each point. In contrast, the corrected predictions generated by the LSTM-H model align much more closely with the actual livestock movements, demonstrating its superior accuracy.
The comparison between the LSTM, STA-LSTM, and the LSTM-H Model is illustrated in Figure 4a, which shows prediction errors over time. Both LSTM and STA-LSTM models exhibit significantly higher and more volatile errors (9.7x and 9.5x respectively) compared to the LSTM-H Model, highlighting the advantages of incorporating real-time corrections. The LSTM-H Model, on the other hand, achieves consistently lower errors by leveraging the LSTM’s sequential learning with the KF’s real-time adaptability. A hybrid version of the STA-LSTM model was also evaluated and returned very similar results to those of the LSTM-H Model. For simplicity and clarity, these results are not included in the analysis.
The results for LSTM and STA-LSTM models were achieved using the training parameters listed in Table 1. These parameters were selected to achieve comparable results for both models, balancing prediction accuracy and computational efficiency. However, with different tuning, better or worse results could be obtained for each model. This tradeoff between accuracy and computational cost requires further study to find an optimal solution for specific scenarios, which is beyond the scope of this paper.
As i’ts illustrated in Figure 4b, the KF and EKF-HMM models also exhibit significantly higher mean errors compared to the LSTM-H Model (8.9x and 14.8x respectively). The KF model, while computationally efficient, fails to account for long-term temporal dependencies, resulting in a mean error of 102.04 meters. The EKF-HMM model, despite integrating behavioral classification, suffers from high complexity and large error variance, with a mean error of 170.29 meters.
5.2. Error Distribution and Cumulative Analysis
Figure 5 provides a boxplot visualization of the error distributions for all models. The LSTM-H Model achieves the smallest error spread, with median errors and outliers significantly lower than the other models. This highlights its reliability and robustness in predicting livestock movements under noisy and dynamic conditions.
Figure 6 illustrates the cumulative distribution function (CDF) of prediction errors. The LSTM-H Model achieves a 90% probability of errors below 13 meters, compared to significantly higher thresholds for the other models. This demonstrates its superior accuracy and reliability for livestock movement prediction.
5.3. Prediction Accuracy Over 30 Steps
The evaluation spans a 30-minute prediction horizon, with each step representing one minute. Figure 7 highlights the prediction errors for all models over these steps. While the proposed model’s performance declines gradually with time, it consistently outperforms the benchmarks. The STA-LSTM, with its spatiotemporal attention mechanism, demonstrates better accuracy than the standard LSTM as steps increase, even though both are aligned at the first step. However, this improved accuracy that comes at the cost of higher computational demands, is still 4.3 folds less efficient than the proposed model.
5.4. Summary of Model Performance
Table 2 presents the overall performance of all models, highlighting their mean prediction errors for both the first step and the average across 30 prediction steps. The LSTM-H model demonstrates remarkable accuracy, with other models exhibiting errors that are 8.9x to 14.8x higher in the first step and 4.3x to 7.5x higher over the entire 30-step horizon.

Table 2.
Prediction errors and relative increase compared to LSTM-H for step 1 and the average of steps 1–30
Table 2.
Prediction errors and relative increase compared to LSTM-H for step 1 and the average of steps 1–30
| Model | Step 1 Error | Increase | Step 1–30 Errors | Increase |
|---|---|---|---|---|
| LSTM-H | 11.51m | - | 40.68m | - |
| LSTM | 111.87 m | 9.7x | 220.64 m | 5.4x |
| STA-LSTM | 109.11 m | 9.5x | 173.40 m | 4.3x |
| KF | 102.04 m | 8.9x | 294.92 m | 7.2x |
| EKF-HMM | 170.29 m | 14.8x | 306.57 m | 7.5x |
6. Conclusions
This study developed LSTM-H, a hybrid deep-learning model that enhances livestock movement prediction by integrating LSTM’s sequential learning with Kalman Filter’s real-time corrections. Evaluations against benchmark models (KF, LSTM, STA-LSTM, EKF-HMM) demonstrated superior accuracy, with LSTM-H significantly reducing prediction errors. By combining deep learning-based sequence modeling with real-time corrections, LSTM-H effectively adapts to noisy and dynamic movement patterns, reinforcing AI-driven solutions for precision livestock monitoring.
The implications for agriculture and livestock management are substantial. LSTM-H enables high-precision tracking, helping farmers reduce livestock loss, enhance disease control, and optimize grazing patterns. More accurate movement predictions also support better strategic decision-making in resource management and infrastructure planning.
Future research should explore hyperparameter optimization for enhanced efficiency and integration with UAV trajectory planning to enable real-time, scalable livestock monitoring. These advancements can drive AI-powered solutions that improve sustainability and efficiency in modern agriculture.
DURC Statement
Current research is limited to the field of livestock movement prediction, which is beneficial for precision agriculture and UAV-based monitoring and does not pose a threat to public health or national security. The authors acknowledge the dual-use potential of the research involving AI-driven animal tracking and confirm that all necessary precautions have been taken to prevent potential misuse. As an ethical responsibility, the authors strictly adhere to relevant national and international laws regarding Dual-Use Research of Concern (DURC). The authors advocate for responsible deployment, ethical considerations, regulatory compliance, and transparent reporting to mitigate misuse risks and foster beneficial outcomes.
References
- Ergunsah, S.; Tümen, V.; Kosunalp, S.; Demir, K. Energy-efficient animal tracking with multi-unmanned aerial vehicle path planning using reinforcement learning and wireless sensor networks. Concurr. Comput. Pract. Exp. 2023, 35, e7527. [Google Scholar] [CrossRef]
- Neethirajan, S.; Kemp, B. Digital livestock farming. Sens. Bio-Sens. Res. 2021, 32, 100408. [Google Scholar] [CrossRef]
- Moradi, S.; Bokani, A.; Hassan, J. UAV-based smart agriculture: A review of UAV sensing and applications. In Proceedings of the 2022 32nd International Telecommunication Networks and Applications Conference (ITNAC), Wellington, New Zealand, 5 January 2023; IEEE: New York, NY, USA, 2022; pp. 181–184. [Google Scholar]
- Neethirajan, S. The role of sensors, big data and machine learning in modern animal farming. Sens. Bio-Sens. Res. 2020, 29, 100367. [Google Scholar] [CrossRef]
- Mukhamediev, R.I.; Yakunin, K.; Aubakirov, M.; Assanov, I.; Kuchin, Y.; Symagulov, A.; Levashenko, V.; Zaitseva, E.; Sokolov, D.; Amirgaliyev, Y. Coverage path planning optimization of heterogeneous UAVs group for precision agriculture. IEEE Access 2023, 11, 5789–5803. [Google Scholar] [CrossRef]
- Benalaya, N.; Adjih, C.; Amdouni, I.; Laouiti, A.; Saidane, L. UAV search path planning for livestock monitoring. In Proceedings of the 2022 IEEE 11th IFIP International Conference on Performance Evaluation and Modeling in Wireless and Wired Networks (PEMWN), Rome, Italy, 8–10 November 2022; IEEE: New York, NY, USA, 2022; pp. 1–6. [Google Scholar]
- Monteiro, A.; Santos, S.; Gonçalves, P. Precision agriculture for crop and livestock farming—Brief review. Animals 2021, 11, 2345. [Google Scholar] [CrossRef]
- Salehi, S.; Bokani, A.; Hassan, J.; Kanhere, S.S. Aetd: An application-aware, energy-efficient trajectory design for flying base stations. In Proceedings of the 2019 IEEE 14th Malaysia International Conference on Communication (MICC)., Selangor, Malaysia, 2–4 December 2019; IEEE: New York, NY, USA, 2019; pp. 19–24. [Google Scholar]
- Strong, A.K.; Martin, S.M.; Bevly, D.M. Utilizing Hidden Markov Models to Classify Maneuvers and Improve Estimates of an Unmanned Aerial Vehicle. IFAC-PapersOnLine 2021, 54, 449–454. [Google Scholar] [CrossRef]
- Kant, R.; Saini, P.; Kumari, J. Long short-term memory auto-encoder-based position prediction model for fixed-wing UAV during communication failure. IEEE Trans. Artif. Intell. 2022, 4, 173–181. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, M.; Dong, C.; Feng, Y.; Yuan, Y.; Feng, S.; Quek, T.Q. Routing protocol for heterogeneous FANETs with mobility prediction. China Communications 2022, 19, 186–201. [Google Scholar] [CrossRef]
- Salehi, S.; Hassan, J.; Bokani, A. An optimal multi-uav deployment model for uav-assisted smart farming. In Proceedings of the 2022 IEEE Region 10 Symposium (TENSYMP), Mumbai, India, 1–3 July 2022; IEEE: New York, NY, USA, 2022; pp. 1–6. [Google Scholar]
- Nicolas, G.; Apolloni, A.; Coste, C.; Wint, G.W.; Lancelot, R.; Gilbert, M. Predictive gravity models of livestock mobility in Mauritania: The effects of supply, demand and cultural factors. PloS ONE 2018, 13, e0199547. [Google Scholar] [CrossRef] [PubMed]
- Zhao, K.; Jurdak, R. Understanding the spatiotemporal pattern of grazing cattle movement. Sci. Rep. 2016, 6, 31967. [Google Scholar] [CrossRef] [PubMed]
- Suseendran, G.; Balaganesh, D. Cattle movement monitoring and location prediction system using Markov decision process and IoT sensors. In Proceedings of the 2021 2nd International Conference on Intelligent Engineering and Management (ICIEM), London, UK, 28–30 April 2021; IEEE: New York, NY, USA, 2021; pp. 188–192. [Google Scholar]
- Bajardi, P.; Barrat, A.; Savini, L.; Colizza, V. Optimizing surveillance for livestock disease spreading through animal movements. J. R. Soc. Interface 2012, 9, 2814–2825. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Poulton, G.; Corke, P.; Bishop-Hurley, G.; Wark, T.; Swain, D.L. Using accelerometer, high sample rate GPS and magnetometer data to develop a cattle movement and behaviour model. Ecol. Model. 2009, 220, 2068–2075. [Google Scholar] [CrossRef]
- Nielsen, L.R.; Pedersen, A.R.; Herskin, M.S.; Munksgaard, L. Quantifying walking and standing behaviour of dairy cows using a moving average based on output from an accelerometer. Appl. Anim. Behav. Sci. 2010, 127, 12–19. [Google Scholar] [CrossRef]
- Jiandong, Z.; Yukun, G.; Lihui, Z.; Qiming, Y.; Guoqing, S.; Yong, W. Real-time UAV path planning based on LSTM network. J. Syst. Eng. Electron. 2024. [Google Scholar]
- Neethirajan, S. Artificial intelligence and sensor innovations: enhancing livestock welfare with a human-centric approach. Hum.-Centric Intell. Syst. 2024, 4, 77–92. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. 1960. [Google Scholar] [CrossRef]
- Song, X.; Liu, Y.; Xue, L.; Wang, J.; Zhang, J.; Wang, J.; Jiang, L.; Cheng, Z. Time-series well performance prediction based on Long Short-Term Memory (LSTM) neural network model. J. Pet. Sci. Eng. 2020, 186, 106682. [Google Scholar] [CrossRef]
- Jiang, R.; Xu, H.; Gong, G.; Kuang, Y.; Liu, Z. Spatial-temporal attentive LSTM for vehicle-trajectory prediction. ISPRS Int. J. Geo-Inf. 2022, 11, 354. [Google Scholar] [CrossRef]
- Farjad-Pezeshk, N.; Asadpour, V. Robust chaotic parameter modulation based on hybrid extended Kalman filter and hidden Markov model detector. In Proceedings of the 2011 19th Iranian Conference on Electrical Engineering. IEEE, Tehran, Iran, 17–19 May 2011; 2011; pp. 1–4. [Google Scholar]
- Pavlovic, D.; Davison, C.; Hamilton, A.; Marko, O.; Atkinson, R.; Michie, C.; Crnojevic, V.; Andonovic, I.; Bellekens, X.; Tachtatzis, C. Precision Beef - Animal Behaviour Classification 2021. [CrossRef]
Figure 1.
Cattle movements over time (sampling Interval: 60 seconds, cattle: 18, duration: 3 hours)
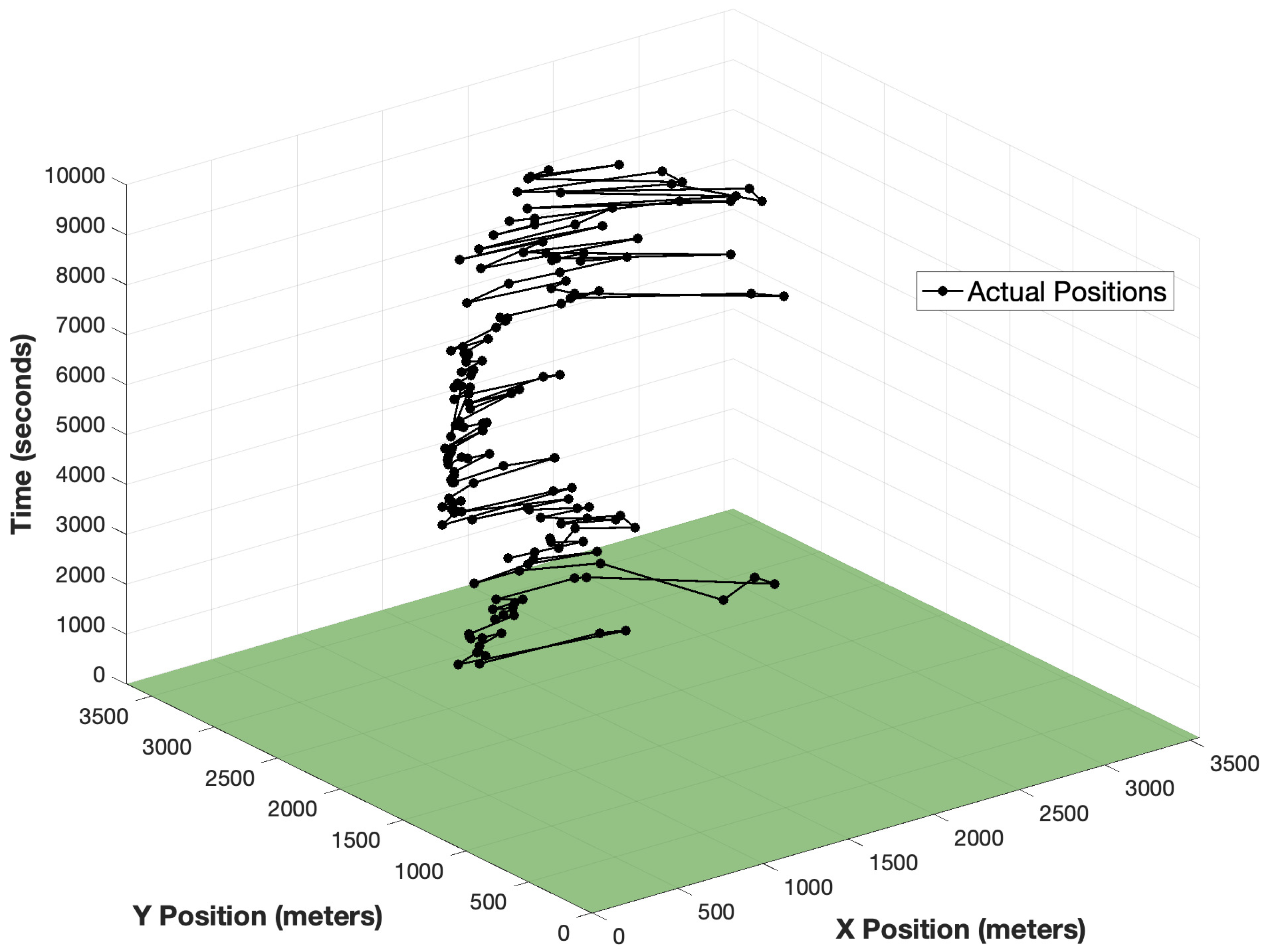
Figure 2.
Movement heatmaps for cattle ID 18 across four 3-hour time intervals, showing x and y positions within the farm area.
Figure 2.
Movement heatmaps for cattle ID 18 across four 3-hour time intervals, showing x and y positions within the farm area.
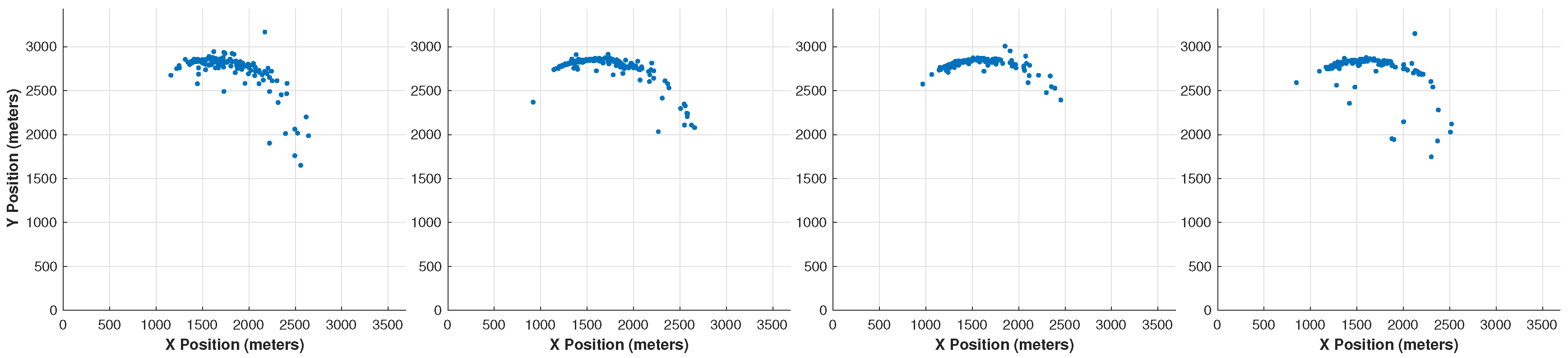
Figure 3.
Cattle movement prediction over time: Actual positions against LSTM and LSTM-H predicted geo-locations (sampling Interval: 60 seconds, cattle: 18, duration: 3 hours)
Figure 3.
Cattle movement prediction over time: Actual positions against LSTM and LSTM-H predicted geo-locations (sampling Interval: 60 seconds, cattle: 18, duration: 3 hours)
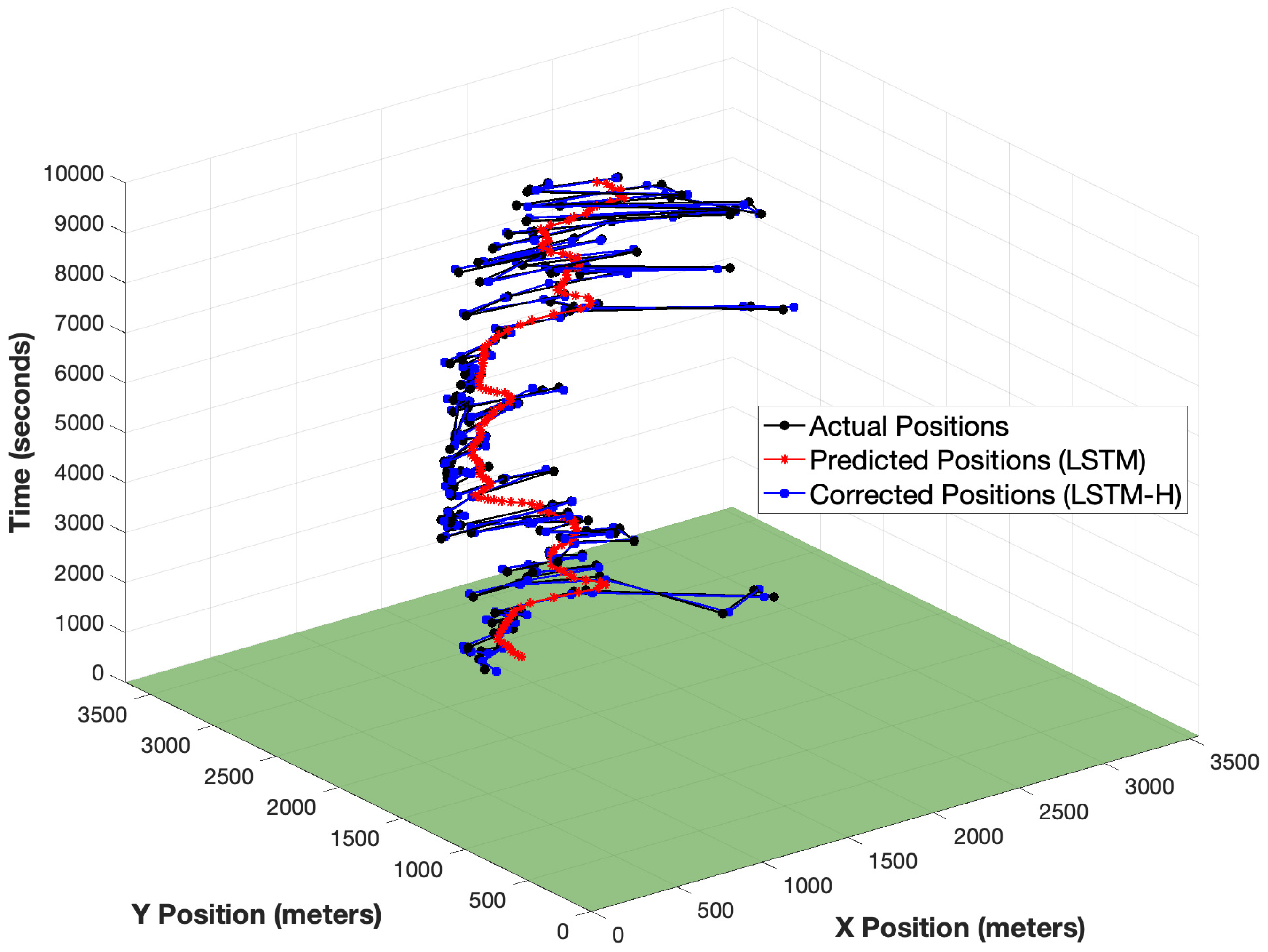
Figure 4.
Comparison of prediction errors over time for the LSTM-H Model against (a) LSTM and STA-LSTM, (b) KF and EKF-HMM. The LSTM-H Model significantly outperforms other models.
Figure 4.
Comparison of prediction errors over time for the LSTM-H Model against (a) LSTM and STA-LSTM, (b) KF and EKF-HMM. The LSTM-H Model significantly outperforms other models.
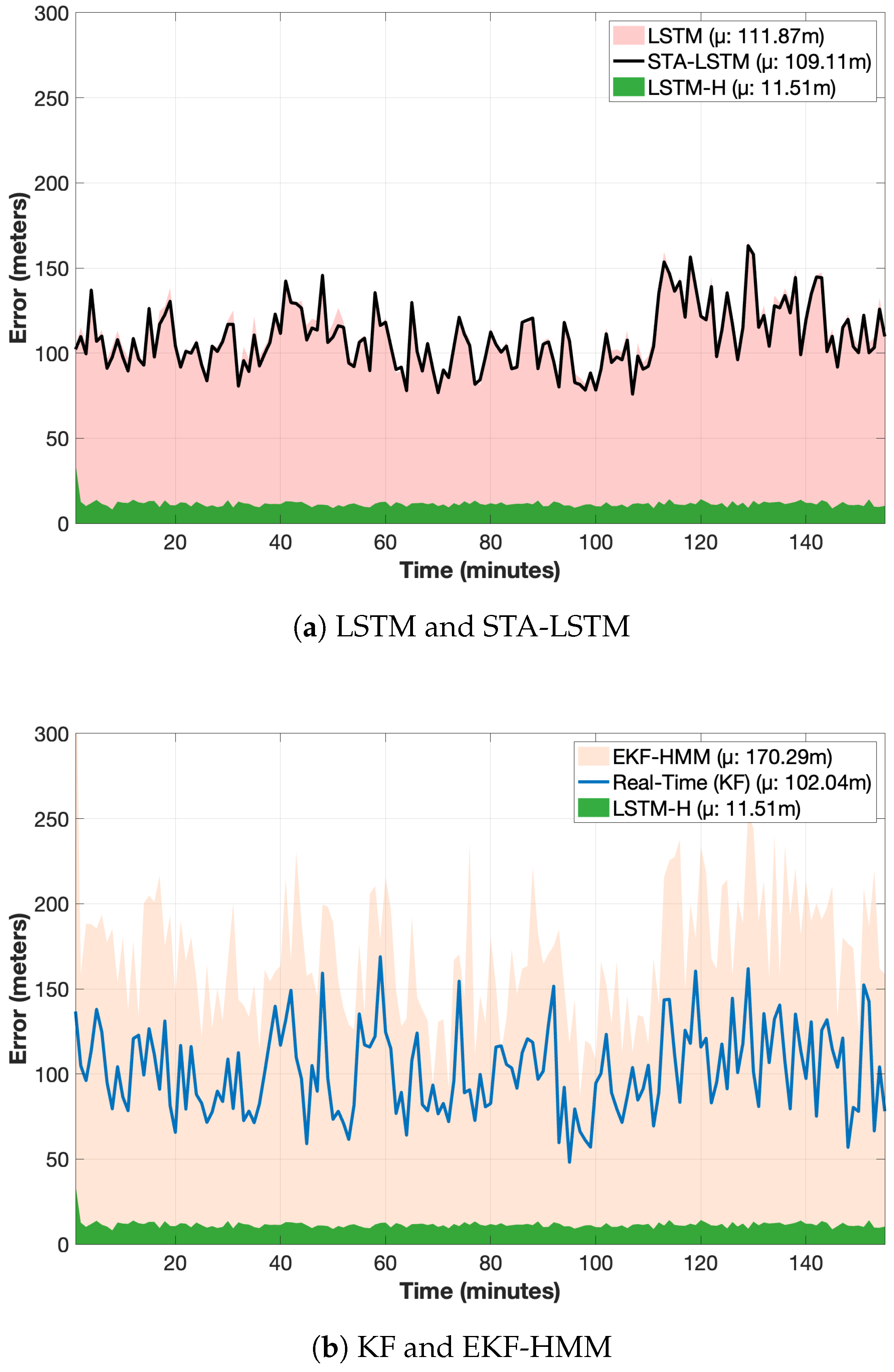
Figure 5.
Boxplot of prediction errors for all models.The LSTM-H Model achieves the low esterror spread,
emphasizing its robustness compared to other models.
Figure 5.
Boxplot of prediction errors for all models.The LSTM-H Model achieves the low esterror spread,
emphasizing its robustness compared to other models.
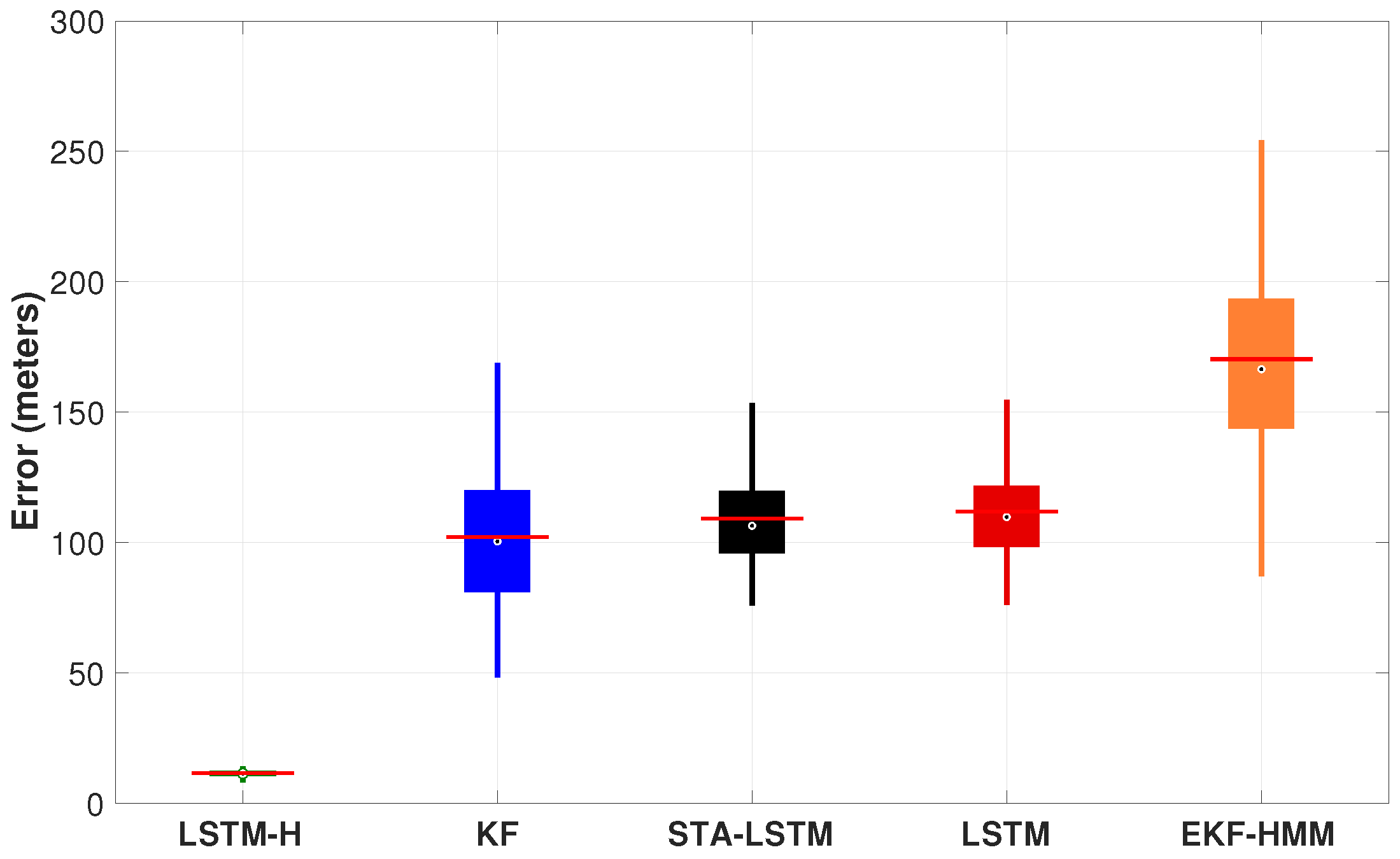
Figure 6.
Cumulative distribution function (CDF) of prediction errors. The LSTM-H Model exhibits the highest probability of achieving low errors compared to all other models.
Figure 6.
Cumulative distribution function (CDF) of prediction errors. The LSTM-H Model exhibits the highest probability of achieving low errors compared to all other models.
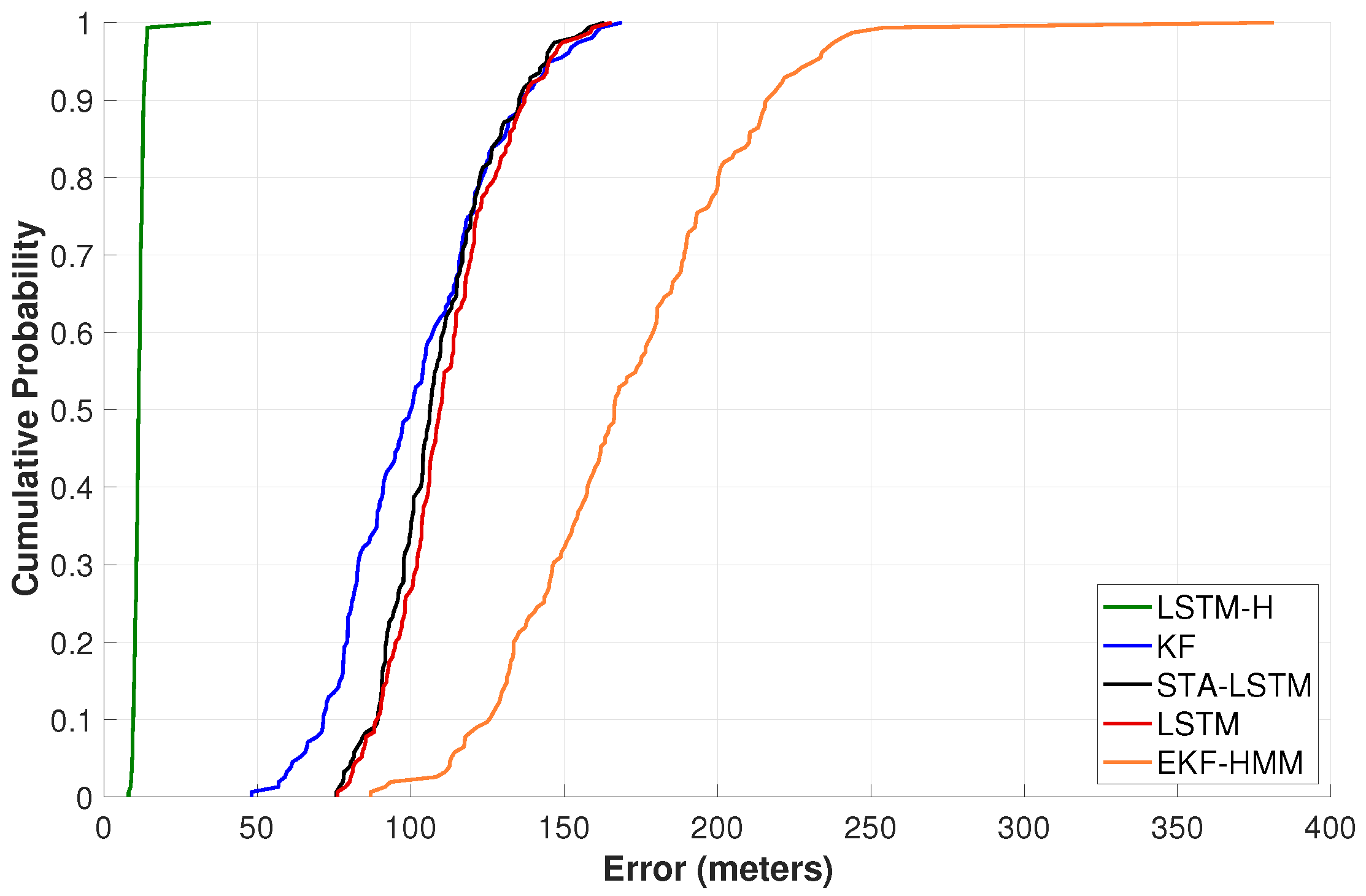
Figure 7.
Mean errors of all models across 30 prediction steps.The LSTM-H Model demonstrates the lowest errors across the entire horizon,significantly outperforming other models.
Figure 7.
Mean errors of all models across 30 prediction steps.The LSTM-H Model demonstrates the lowest errors across the entire horizon,significantly outperforming other models.
Table 1.
Tuning Parameters for LSTM and STA-LSTM Models
| Parameter | Value |
|---|---|
| Max Epochs | 200 |
| Mini-Batch Size | 64 |
| Initial Learning Rate | 0.002 |
| Learning Rate Drop Factor | 0.005 |
| Learning Rate Drop Period | 80 |
| Gradient Threshold | 1.2 |
| L2 Regularization | 0.002 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



