
Submitted:
31 March 2025
Posted:
01 April 2025
You are already at the latest version
Abstract
The European Commission has taken a further step towards reducing the number of road fatalities with the road safety policy framework and the long-term goal of Vision Zero by 2050. However, the number of fatalities is not developing as expected and is lagging behind the target. A key pillar of the framework is safe vehicles and their ability to avoid collisions. Although the number of autonomous safety systems in vehicles is increasing, retrofitted systems could also help reduce road accidents. A new retrofit assistance system called Front Brake Light (FBL) helps the driver to assess the intentions of other road users. This system is mounted at the front of the vehicle and worksing similarly to the rear brake lights. The objective of the study is to evaluate the safety performance of an FBL in real accidents at junctions. Depending on the type of accident, between 7.5% and 17.0% of the accidents analysed can be prevented. A further 9.0% to 25.5% could be positively influenced by the FBL, i.e. the collision speed could be reduced. If the FBL were visible to the driver of the priority vehicle, the number of potentially avoidable accidents would increase to a magnitude of 11.5% to 26.2%. The range of accidents in which the consequences can be reduced increases to between 13.8% andto 39.2%.
Keywords:
front brake light
; ADAS
; crash avoidance
; junction accidents
1. Introduction
The first driver assistance system was undoubtedly the anti-lock braking system (ABS) introduced in 1978 [1]. Since then, many other systems have been developed to assist the driver (e.g. frontal collision warning (FCW)) or to intervene independently (e.g. emergency braking assist (AEB)) in situations where a collision is imminent. These systems are also used for junction collision avoidance, although the accident types can be very different (see Appendix A).
The impact of junction collision avoidance systems has been investigated for several junction accident types such as Straight Crossing Path (SCP) [2,3], Left Turn Across Path/Opposite Direction (LTAP/OD) and SCP [4,5], LTAP/OD [6,7,8] or junctions in general in urban or rural areas [9]. Collision avoidance systems have proven to be effective [9,10,11,12] and the number of vehicles fitted with them is steadily increasing [13]. However, due to the cycle of average renewal it will take many years until the fleet of vehicles is almost completely equipped with new safety systems [13,14,15].
One way to accelerate the share of vehicles equipped with these systems is through the requirements of NCAP (New Car Assessment Programme) [16]. Euro NCAP has included an assessment of autonomous braking at junctions in its test protocols [17]. Legislation, however, would be a quicker way, as all vehicles must be equipped with certain systems as soon as they become mandatory [18], but even then it would depend on the renewal cycle of vehicles. Therefore, the retrofitting of advanced driver assistance systems to vehicles should also be investigated and their potential safety benefits analysed. Scholliers et al. [19] showed a positive effect of retrofitted systems on road safety. Tomasch and Smit [20] analysed a retrofitted driver warning system in trucks and buses and showed a positive effect on the number of critical events. Another assistance system that can be retrofitted is the Front Brake Light (FBL). The FBL was developed many years ago [21,22] and is a forward-facing brake light that is mounted at the front of the vehicle. As soon as the car starts to decelerate, the FBL is activated and remains activated while decelerating until the car stops decelerating [23] – similar to rear braking lights. In the 1970s, Post and Mortimer [24] made a first attempt to study the effects of a forward-facing brake light. The authors fitted cars with the system for a month and surveyed drivers and non-drivers. They concluded that there was acceptance in both groups and that the majority found the concept beneficial.
But since this initial investigation, the idea had not been pursued any further until in 2015 a new attempt was conducted by Petzoldt et al. [25,26] under laboratory conditions. In the study, participants were first asked to identify a braking manoeuvre without the FBL. In a second step, the braking manoeuvre was also indicated by the FBL. The FBL was found to be beneficial and supportive in the test conducted. Vehicle deceleration with the assistance of an FBL was detected significantly faster than vehicle deceleration without this FBL. The results are based on a sample of 31 participants as pedestrians and the interaction between pedestrians and passenger cars. Following this, Eisele and Petzoldt [27] and Bluhm et al. [28] investigated the willingness of adults and children to cross the road when approached by a vehicle with or without an FBL. Participants were asked to indicate whether they would cross the road based on video data. Both studies showed that willingness to cross increased when the FBL was activated and decreased when the FBL was not activated. The results are based on video data and it is not possible to assess the extent to which the results can be transferred to real traffic situations.
In order to evaluate the effect of FBL in real traffic situations, an NDS (Naturalistic Driving Study) was first launched in a protected airside area at Berlin Tegel airport [29]. 102 vehicles were fitted with a FBL for a period of three and a half months. 197 participants were interviewed before and after this test period with regard to their experience with the FBL. Overall, the vast majority of participants reported that an FBL increases road safety and improves communication between drivers and other road users. The study confirms Post and Mortimer’s findings that communication would be improved and that an FBL would potentially improve vehicle safety [24].
Based on these promising results, another NDS was launched in real public traffic in the Slovakian region of Trencin, Partizanske and Zilina. 3,072 vehicles were fitted with FBL for a period of six to eleven months. 210 drivers were interviewed before the FBL was installed in their vehicle and once again six to eleven months later. In addition, 2,476 other drivers of vehicles with FBLs were interviewed after the end of the NDS, as well as 621 other road users who had not driven a vehicle with an FBL themselves. Again, the vast majority reported positive experiences with the FBL in terms of road safety. Well over 75% of the interviewed road users supported the idea of a general introduction of the FBL. Some parts of this NDS have been published already [30,31], the complete study and results are to follow soon.
2. Objective
A potential positive effect of an FBL on the number or the impact of traffic accidents has not yet been investigated. The aim of this study is therefore a prospective evaluation of the safety performance of an FBL by means of a counterfactual simulation on the basis of real traffic accidents at junctions.
3. Material
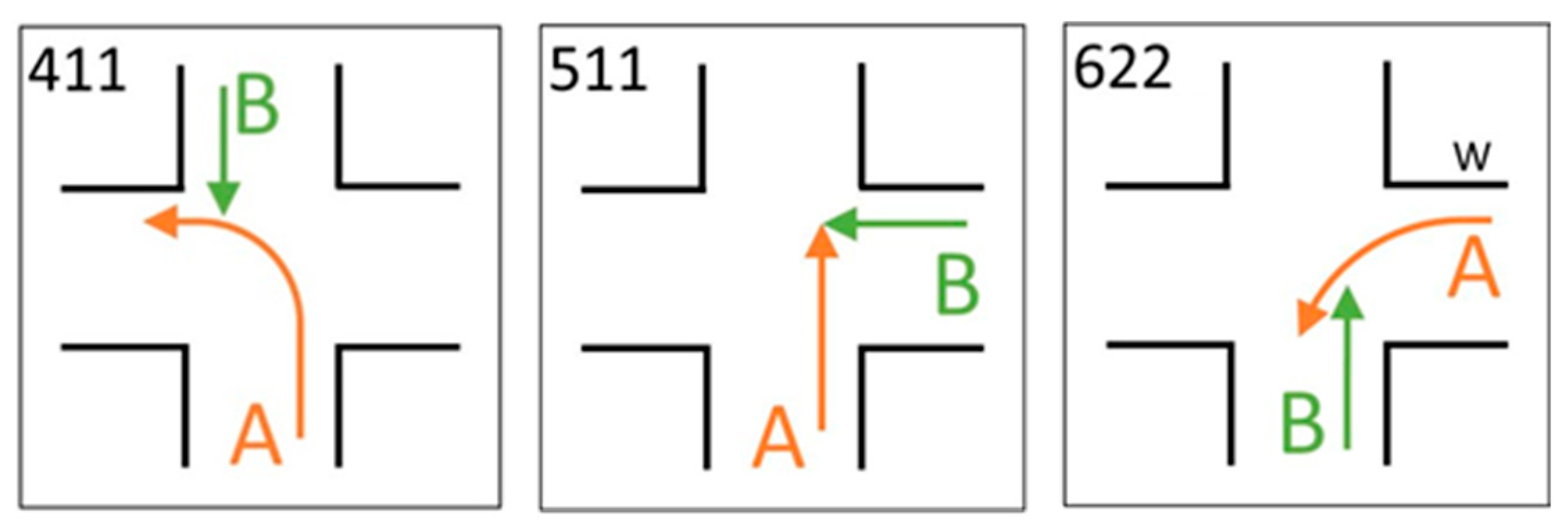
The accident types most likely to be considered when evaluating the safety performance of an FBL are those involving accidents at junctions. The most frequent accident types for all injury severities on Austrian roads are accident types 411 (LTAP/OD), 511 (SCP) and 622 (LTAP/LD: Left Turn Across Path/Left Direction). These three accident types account for 72.7% of minor injury accidents, 81.7% of serious injury accidents and 81.9% of fatalities at junctions. All accident types and figures at junctions are given in Appendix B.
In total, 200 accidents of varying severity are analysed from the most common accident types in national statistics (Table 1). For the in-depth analysis, the CEDATU (Central Database for In-Depth Accident Study) accident database was used [32]. CEDATU distinguishes between accident-initiating and non-initiating participants. In this way, the road user who has caused the accident can be identified.
Figure 1.
Relevant accident types according to the national statistics enhanced by the accident initiator “A” and the non-initiator “B”.
Figure 1.
Relevant accident types according to the national statistics enhanced by the accident initiator “A” and the non-initiator “B”.
4. Method
A number of different methods can be used to estimate the potential effectiveness of intersection assistance systems, depending on the data available to the authors. In the very early stages, only the function is being developed, i.e. the system is intended to warn the driver or intervene autonomously. At this stage, only prospective methods can be used to assess effectiveness. Prototype systems can be used in Field Operational Tests (FOT). The counterfactual simulation (“what-if”) method [33] has been used by several authors (e.g. Scanlon et al. [4,5], Zauner et al. [9], Sander and Lubbe [8], Sander [7]). Effectiveness was evaluated using pre-crash reconstructed cases in a virtual simulation framework. Field Operational Test (FOT), Naturalistic Driving Study (NDS) or driving simulator studies have also been used to assess effectiveness (e.g. Wu et al. [34], Shichrur et al. [35], Tomasch and Smit [20], Kim et al. [11], Chen et al. [36], Chang et al. [2]).
The present study used the counterfactual (“what-if”) simulation method. The methodology is divided into two steps. In the first step, the traffic accident is reconstructed to determine the collision parameters, such as collision speed and pre-collision motion. The reconstruction is referred to as the “baseline”. In a second step, it is assumed that the non-priority vehicle is equipped with an FBL and the accident is simulated again. The simulation in the second step is referred to as the counterfactual simulation (“what-if”) or “treatment”. By comparing the baseline and the treatment, the safety performance is determined.
4.1. Reconstruction (“Baseline”)
The accident can be divided into four phases [37]. The entire phase is the normal driving phase. This phase is interrupted by an extraordinary event, the point of conflict. A conflict does not necessarily lead to a crash. If the road users remain on their travelling path without steering or braking, i.e. without road user intervention, the conflict will result in a crash [38]. The pre-crash phase begins with the extraordinary event and ends with the first collision between the road users. In the crash phase, energy is dissipated by deformation of the vehicles. This is the shortest phase and lasts only a few milliseconds. In the final phase, the road users move to their final position after the collision. All phases are connected to each other in terms of speed. The speed at the end of one phase is the speed at the beginning of the subsequent phase.
The PC-Crash reconstruction software [39] is used to analyse accident parameters such as collision speed, change of velocity (delta-v), speed before braking, etc. PC-Crash is validated software and is widely used in accident research to analyse road accidents [40,41,42]. Rose and Carter [43] reviewed the literature that has looked at the capabilities of PC-Crash and its accuracy and reliability for a variety of applications. The literature has shown that the PC-Crash software is accurate in simulating vehicle collisions. However, if the user does not have sufficient expertise or does not understand the physical evidence, accurate results cannot be guaranteed.
Reconstructing an accident starts at the point of impact, and the method is described by Steffan [44]. A momentum-based collision model is used to calculate the impact, the post impact velocity and the velocity change during impact (delta-v). The pre-collision phase is simulated backwards based on braking or skid marks, driver reports and witness reports [45,46]. The pre-collision phase is plotted according to the course of the road, so that the path of the vehicles involved before the collision is well known. The initial speed and the initial position of the participating road users is assessed by the simulation of the pre-crash phase.
In this study, the pre-crash phase is simulated backwards to a few seconds before the crash to ensure that the point of conflict is captured in the pre-collision phase.
4.2. Counterfactual Simulation (“What-If”, “Treatment”)
The counterfactual simulation method is used to hypothetically subject a given measure to existing traffic accidents and assess its potential impact on preventing accidents or reducing their consequences [40]. This method has been used in several studies [9,47,48], and an ISO standard is currently being developed [43].
The initial position at the beginning of the pre-crash phase from the reconstruction is used as the starting position for the subsequent counterfactual simulation. The vehicles are now simulated forwards based on the reconstructed pre-crash path of the participants at their initial speed.
For the purpose of this study, the car is equipped with a brake light at the front of the car – “what-if” (Figure 2). This light is active when the car is braking or stationary and is not active in all other modes (acceleration, driving at constant speed).
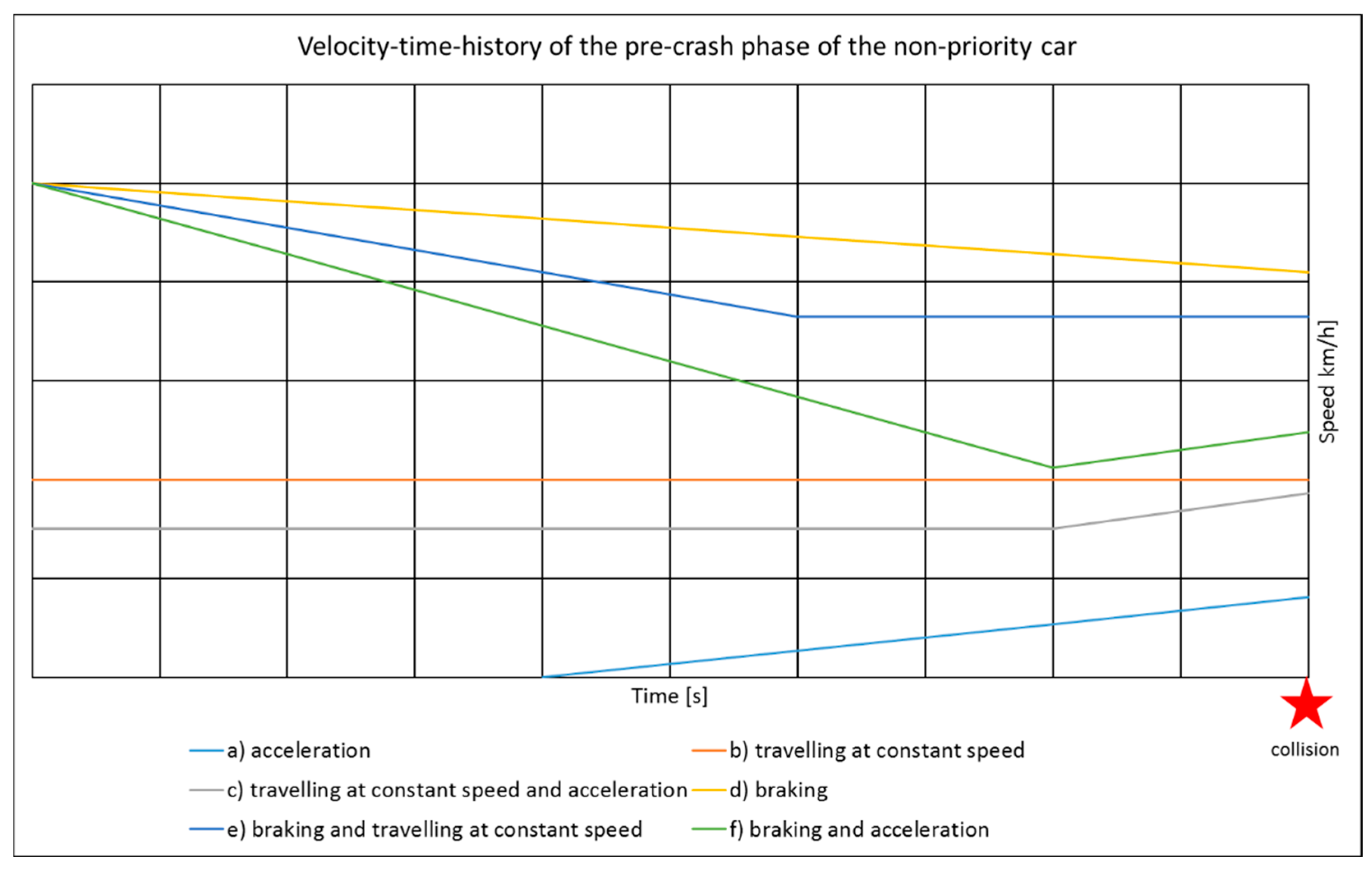
In the event of a violation of the rules, the non-priority vehicle can enter the junction in a number of different scenarios. In all of these scenarios, the FBL may or may not be activated. Figure 6 shows different velocity-time histories of the pre-collision phase of the non-priority car. In all the cases studied, a distinction is made between the scenarios shown in Figure 6, i.e. which scenario would be applicable to the particular case under consideration.
- Scenario a): The non-priority car is stationary and the brake pedal is depressed. The FBL is activated. As soon as the driver starts to move, the FBL is deactivated. The priority car is now requested to react.
- Scenario b): The non-priority car approaches the junction at a constant speed without braking. The FBL is deactivated. A reaction of the priority car is requested at the point where it is clear that the non-priority car is entering the priority car’s lane.
- Scenario c): The non-priority car approaches the junction at a constant speed and starts to accelerate. The FBL is deactivated. A reaction of the priority car is requested at the point where it is clear that the non-priority car is entering the priority car’s lane.
- Scenario d): The non-priority car approaches the junction and is braking but not stopping at the stop line. The FBL is activated all the time. A reaction of the priority car is requested at the point where it is clear that the non-priority car is entering the priority car’s lane.
- Scenario e): The non-priority car is braking first and then travelling at constant speed to the junction. The FBL is activated during the braking phase but is deactivated when driving at constant speed. A reaction of the priority car is requested at the point where it is clear that the non-priority car is entering the priority car’s lane.
- Scenario f): The non-priority car is braking first and then accelerating to the junction. The FBL is activated during the braking phase but is deactivated when driving at constant speed. A reaction of the priority car is requested at the point where it is clear that the non-priority car is entering the priority car’s lane.
Figure 3.
Different velocity-time histories (scenarios) in the pre-collision phase of the non-priority car.
Figure 3.
Different velocity-time histories (scenarios) in the pre-collision phase of the non-priority car.
4.3. Strategy
Different reaction braking times were considered in the counterfactual simulations to cover the wide range of different drivers. The visibility of an FBL has also been taken into account. An FBL mounted only at the front is not visible in every situation. This is especially true when the vehicles are at right angles to each other.
4.3.1. Reaction Braking Time
Collision avoidance often depends on the perception reaction time of the driver. This can prevent a collision or at least reduce the collision speed. A lower collision speed or a change in collision speed (delta-v) reduces the probability of serious and fatal injuries [49].
Reaction braking time includes detecting a hazard, identifying it as a source of danger, deciding on a countermeasure (braking, steering, combination) and executing the countermeasure [50,51]. Perception time is influenced by many different parameters, such as fatigue, alcohol, age of the driver, visibility conditions, etc. [52,53,54,55,56,57,58]. In addition, the perception time is significantly faster when an event is expected than when an unexpected event occurs [50]. A summary of perception times can be found in the study conducted by Green [59]. According to Burckhard [50], the 98th percentile has a reaction time of 0.8 seconds. This means that 98% of drivers have a reaction time of 0.8 seconds or less. For the 98th percentile, the perception time was found to be 0.55 seconds and results in a perception reaction time of 1.35 seconds. Green [59] is more critical of setting a standard reaction time for all drivers. The best possible reaction times, where the driver is already anticipating an event, are between 0.7 and 0.75 seconds. According to Green, the average perception reaction time under realistic everyday conditions would be around 1.25 seconds. Surprising situations require a reaction time of about 1.5 seconds. In the Petzold et al. [25,26] study, the volunteers were able to detect braking cars more quickly. Therefore, it is assumed that cars starting to move and deactivation of the brake light will also be detected more quickly.
As there is no information on the reaction time when using an FBL from previous studies, different reaction times are applied to the counterfactual simulations to estimate the range in which an FBL would be able to avoid a collision. Reaction times of 0.5, 1.0 and 1.5 seconds are considered to cover the different findings on reaction times in the literature.
4.3.2. Visibility of the FBL
The visibility of the FBL is strongly dependent on the relative angle between the two road users. If the road users are perpendicular to each other, the FBL is not visible. In the case of two vehicles approaching at a relative angle of 180°, the FBL would be fully visible. The example in Figure 4 shows an LTAP/LD accident, where the non-priority vehicle (1) turns left and another road user (2) is coming from the left on the priority road and crossing the junction straight ahead. In this example, the relative angle between the two road users is 100 degrees at the time of the reaction request. In Figure 5 , the visibility of the FBL is shown as a function of different relative angles between the non-priority vehicle and the priority vehicle. Two different lengths of FBL are shown. One is 50 cm and the other is 100 cm. In the example given, with a relative angle of 100°, only a small part of the FBL is visible. It is between 8.7 cm for a 50 cm FBL and 17.4 cm for a 100 cm FBL.
A relative angle range between 100° and 260° is assumed for the visibility of the FBL.
4.4. Safety Performance Assessment
The assessment of accidents with changed conditions due to the FBL is based on the avoidance of the collision or a reduction in the consequences of the collision due to a lower collision speed.
If the collision can be avoided by the FBL, the case is classified as “avoidable”. Cases where the collision speed can be reduced but a collision still takes place are classified as “influenceable”. Accidents where the collision speed remains the same in the counterfactual simulation are classified as “no effect”. For influenceable accidents, the accident is assumed to have the same injury severity in the counterfactual simulation as in the baseline. However, injury risk functions [49] can also be used to assess reducing the risk of injury.
Potential safety performance defines the maximum proportion of all accident types that are positively influenced by the safety system [60], i.e. accidents which are prevented or where the consequences of an impact are mitigated. The safety performance specifies the proportion of accident types that are prevented by the safety system under consideration.
5. Results
5.1. Pre-Collision Behaviour in the Baseline
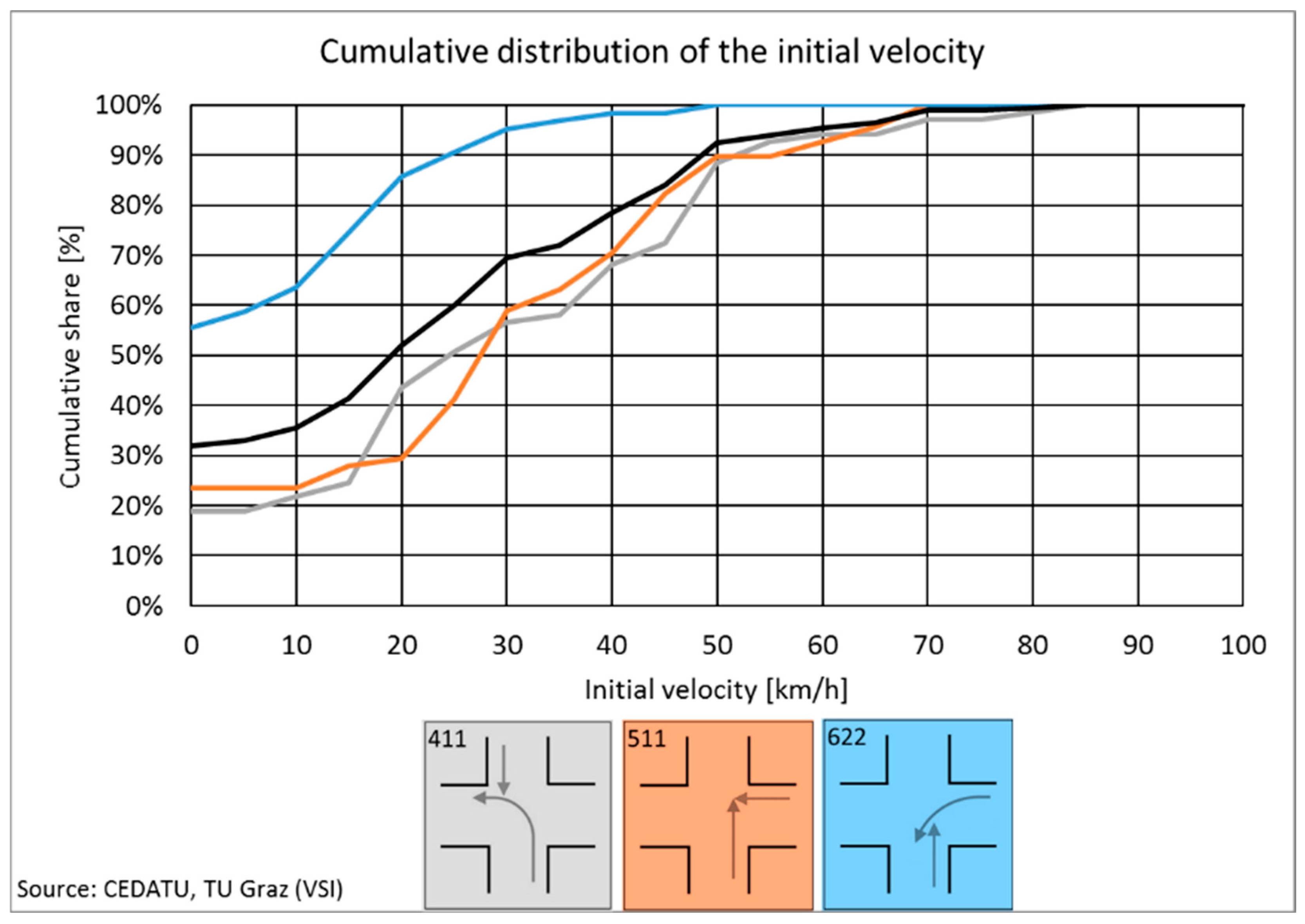
In 27% of the accidents investigated, the driver of the non-priority vehicle had reduced their speed on their approach to the junction (Table 2). Just over a third of the drivers accelerated and in 39% of the cases, the driver maintained a constant speed while negotiating the junction. Differences were found in the types of accidents. Almost one third of drivers came to a complete stop at the junction before starting to negotiate it (Figure 6). In LTAP/LD accidents, 55.6% of non-priority vehicles came to a complete stop, but only 18.8% of drivers in LTAP/OD accidents. 23.5% of the drivers in the SCP accidents stopped their vehicle at the junction.
Figure 6.
Cumulative distribution of the initial speed of the non-priority car.
5.2. FBL Visibility
Figure 2 shows the relative angles of the analysed accident types at the time of the reaction request. In relation to the defined relative angle range, it may not be possible for the driver on the priority road to see the FBL at the time of the reaction request in all accident cases. The FBL would not be visible in 70 (35.0%) accidents. Most involve SCP accidents, where priority and non-priority cars are almost perpendicular to each other. In total, there were 51 (75.0%) cases involving a relative angle at which the driver of the priority vehicle could not see the FBL of the non-priority vehicle. In LTAP/LD accidents, the driver can see the front brake lights in 69.8% of cases. Due to the configuration of LTAP/OD accidents, the FBL is visible to the driver in almost all cases.
5.3. Avoidance and Mitigation
Despite the visibility of an FBL, between 15 (7.5%) and 34 (17.0%) of the accidents analysed could potentially be avoided with an FBL, depending on the reaction braking time. In a further 18 (9.0%) to 51 (25.5%) accidents, the collision speed could potentially be reduced.
Figure 7 shows the total number of analysed cases that could potentially be prevented or in which the collision speed could be reduced with an FBL, broken down by accident type. 11 (15.9%) accidents can be avoided in LTAP/OD accidents and with a fast reaction braking time of 0.5s. In addition, the collision speed can be reduced in 28 (40.6%) accidents. Obviously, increasing reaction braking time reduces the number of possible avoidable accidents. With a slower reaction braking time of 1.5 s, only six accidents can be prevented. In four accidents, the collision speed can be reduced. A similar trend can be seen for SCP and LTAP/LD accidents. The full figures are summarised in Appendix C.
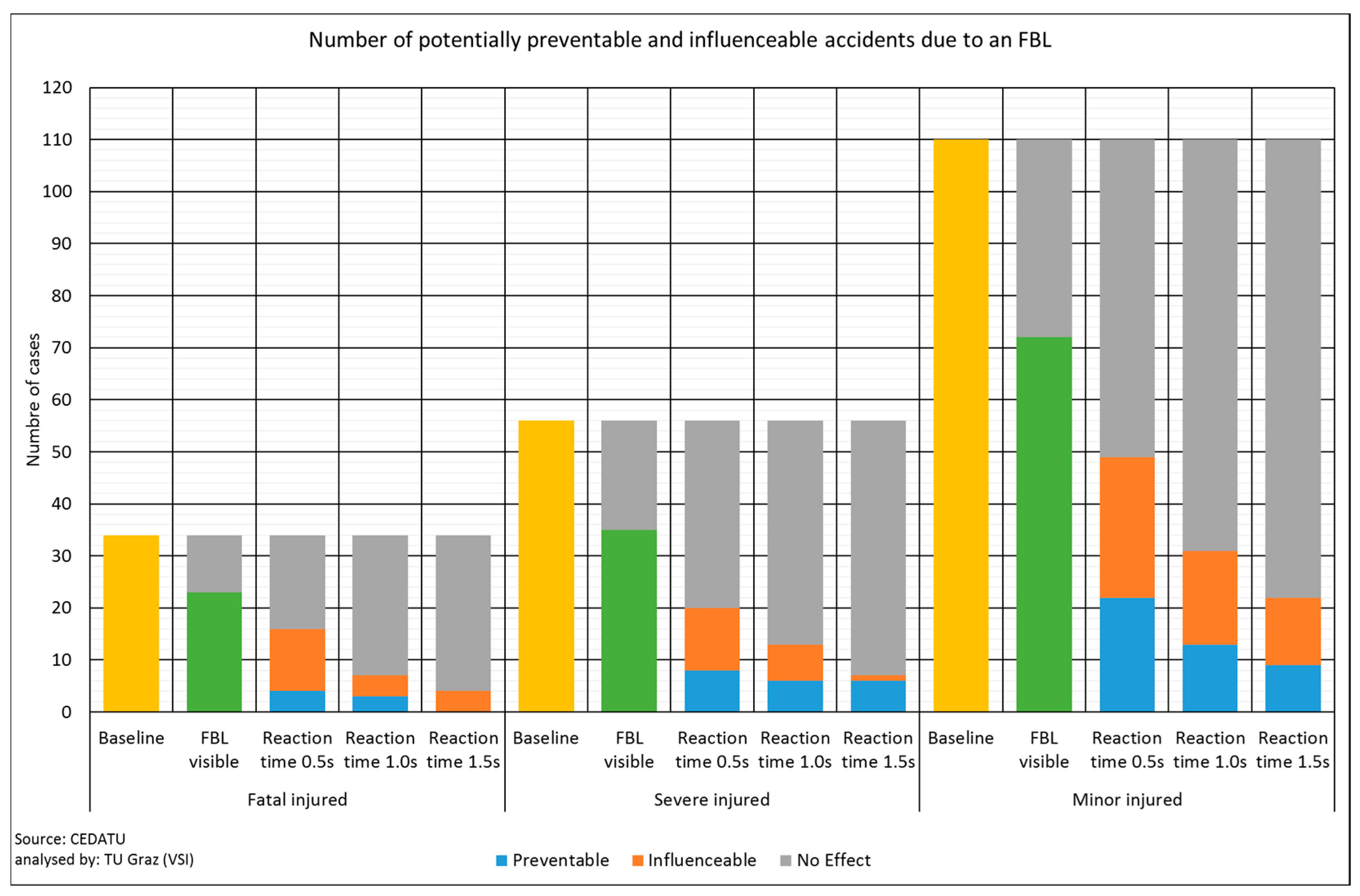
The visibility of the FBL is more related to the type of accident than to the severity of the accident. The FBL was visible in 65.5% of minor injury accidents, 62.5% of serious injury accidents and 67.6% of fatal accidents (Figure 8). Depending on the reaction time, between 8.2% and 20% of the accidents with minor injuries could potentially be avoided with an FBL. The collision speed could be reduced in between 11.8% and 24.5% of the accidents analysed, i.e. the FBL had an influence on the consequences of the collision. Again, reaction braking time has a major influence on avoidance. With a reaction braking time of 1.5 seconds, the avoidance rate is reduced to 8.2%, compared to 20% with a reaction braking time of 0.5%. Accidents involving serious and fatal injuries show similar trends.
Figure 8.
Number of potentially preventable and influenceable accidents due to an FBL distinguished by accident type.
Figure 8.
Number of potentially preventable and influenceable accidents due to an FBL distinguished by accident type.
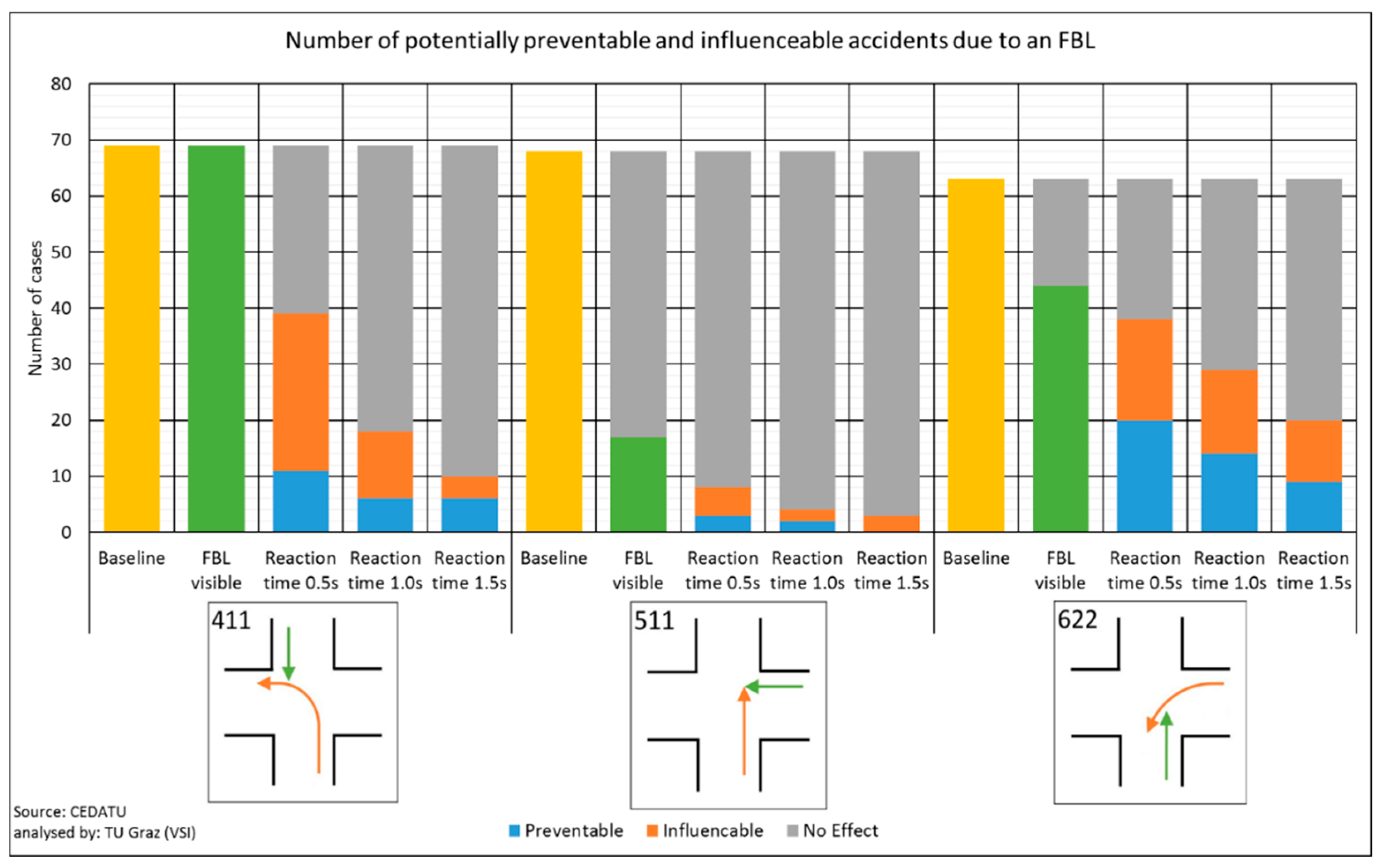
Figure 9.
Number of potentially preventable and influenceable accidents due to an FBL by severity of injury.
Figure 9.
Number of potentially preventable and influenceable accidents due to an FBL by severity of injury.
No major differences were observed between urban and rural sites (Table 3). In urban areas, between 10.7% and 25.0% of accidents are potentially avoidable. The safety performance in rural areas ranges from 11.4% to 26.1%. The FBL may have a greater effect on dry roads compared with adverse road conditions. Adverse conditions include wet roads and snow or slush on the road (Table 4). Potentially avoidable accidents range from 12.8% to 27.7% on dry roads and from 5.8% to 19.2% in adverse road conditions. No difference was found between daylight and darkness, including twilight/dawn (Table 5). The safety performance ranges from 10.5% to 24.5% in daylight and 11.4% to 25.7% in darkness, including twilight/dawn. However, in artificial light conditions, the safety performance is higher, ranging from 13.6% to 31.8%.
5.4. Collision Speed and Change of Velocity
Collision speeds of the priority car range from 44.8 km/h (SD=15.9) to 70.9 km/h (SD=20.5) for minor to fatal accidents in the baseline (Table 6). The collision speed of the priority car could be reduced from an average of 44.8 km/h (SD=15.9) to 28.8 km/h (SD=23.4) with a reaction time of 0.5 s for all cases investigated. With a reaction time of 1.5 s, the collision speed could be reduced to 41.6 km/h (SD=22.2). By selecting the cases where the FBL is visible to the driver of the priority car, the collision speed can be reduced from an average of 46.4 km/h (SD=16.6) to 27.7 km/h (SD=24.3).
The average change of velocity (delta-v) of the baseline for the priority cars is 25.5 km/h (SD=13.2) when the FBL is visible (Table 7). The average delta-v for the non-priority car is 27.6 km/h (SD=16.2). With a reaction time of 0.5 s, the delta-v for the priority car is potentially reduced to 16.6 km/h (SD=15.4) and for the non-priority car to 18.5 km/h (SD=18.3). A difference is observed within injury severity. Accidents with a higher injury severity have a higher delta-v. As reaction braking time increases, safety performance decreases.
6. Discussion
The visibility of the FBL is highly dependent on the relative position of the two cars. If the front of the non-priority car with activated FBL is not visible to the driver of the priority car, the safety performance is rated as zero, i.e. the FBL would not reduce the reaction braking time of the driver of the priority car. The collision configuration would remain the same as in the original accident. In principle, the relative positions of the cars, and therefore visibility of the FBL, are influenced by the angle of the legs at junctions. In almost 35% of the accidents analysed, the FBL was not visible to the driver of the car with priority. In particular, the SCP accidents showed a very high rate (75%) of non-visible FBL situations. In LTAP/LD accidents, the rate of FBL non-visibility is much lower (30.2%), but still high. Obviously, the front of the non-priority car is visible to the driver of the priority car in all collisions in the LTAP/OD accidents. In addition to the relative position of cars, obstructions (e.g. parked cars, fences, etc.) can significantly affect the visibility of road users.
In addition, in 39% of the accidents under investigation, the speed of the non-priority vehicle remained unchanged both in the approach to and negotiation of the junction. Consequently, the FBL is not activated and has no effect. In 34% of cases, the driver of the non-priority car accelerated. During this phase, the FBL is not activated. However, prior to the acceleration phase, the FBL is activated if the car is either stationary or braking. In 32% of the accidents studied, the car had come to a complete stop before the driver started to accelerate. Most of these accidents happened as part of LTAP/LD accidents.
The number of potentially avoidable accidents ranged from 11.5% to 26.2% if the FBL was visible to the driver of the priority vehicle. The collision speed was able to be reduced and the consequences of the impact mitigated in a further 13.8% to 39.2% of accidents. According to Sander and Lubbe [8], a warning system with a penetration rate of 100% could probably reduce the number of accidents at junctions by up to 50% whilst an AEB could reduce them by up to 70%. The system evaluated by Sander and Lubbe [8] was an in-vehicle system that generates a warning signal when a collision is imminent. This is an active warning system, not a passive one like the FBL, and may explain the higher avoidance rate. Chang et al. [2] estimated a reduction in the accident rate from 44% to almost 16% for drivers using a warning system. Chen et al. [36] showed a potential collision avoidance of 40% to 50% with an intersection collision warning system and a reduction in driver reaction time. There was also a reduction in speed when the driver received a warning. However, those would be active warning systems signalling inside a vehicle, not a passive ones signalling to the other vehicle like FBL.
The current study is more consistent with the figures found by Wu et al. [34] who analysed traffic conflicts at junctions without distinguishing between accident types. They found a 15% to 26% reduction in critical events when comparing the risk of vehicles with and without the warning system. Wu et al. [34] analysed critical events and did not extrapolate the results to include potentially avoidable accidents. However, the number of traffic conflicts correlates with the number of accidents [61].
Not many studies were found that differentiated between the types of accidents at junctions. Sander [7] analysed LTAP/OD and Scanlon et al. [3,5] analysed SCP. No studies were found that analysed LTAP/LD accidents. However, the studies in the literature refer either to in-vehicle warning systems [3,5] or to systems that intervene autonomously [7].
Potentially avoidable accidents for LTAP/OD are similar in magnitude to those reported in the literature. In the present study, the range of potential accident avoidance is between 8.7% and 15.9% for LTAP/OD accidents. Sander [7] distinguished the avoidance rate in LTAP/OD accidents between the turning vehicle and the straight moving vehicle. Either of the two vehicles could be equipped with an AEB. An AEB would potentially avoid between 33% and 59% of accidents for the turning vehicle and 11% to 26% for the straight moving vehicle. A faster AEB response time would increase effectiveness by a further 11% to 13%, confirming the impact of early intervention. An AEB significantly reduces braking reaction time. Obviously, the avoidance rate of such a system must be higher.
For SCP accidents, the potential to avoid accidents ranged from 0.0% to 17.6% when the FBL was visible to the driver of the priority vehicle. The impact configuration could be influenced in a further 17.6% to 29.4% of cases. Scanlon et al. [3] estimated that the avoidance rate for this type of accident was between 19% and 35% and that a warning system would have changed the impact conditions in a further 19% to 34% of cases. If one of the vehicles had stopped before entering the junction, between 24% and 49% of collisions could have been avoided. If neither vehicle had stopped, between 13% and 17% could have been avoided. In another study by Scanlon et al. [5], the authors estimated the reduction potential to be up to 23% of SCP accidents and up to 25% of severe injuries. The avoidance rate was significantly higher with a system that intervened autonomously. Avoidance of SCP accidents ranged from 25% to 59% and for severe injuries from 38% to 79%.
Between 20.5% and 45.5% of LTAP/LD accidents could be avoided if the FBL was visible to the driver of the car with priority. In a further 25.0% to 40.9% of cases, the collision speed could be reduced. No studies on this type of accident were found in the literature.
Although the visibility of the FBL was much higher in LTAP/OD accidents, the safety performance was higher in LTAP/LD accidents. 20 out of 44 (45.5%) cases where the FBL is visible are potentially avoidable with a braking time of 0.5 s compared with 15.9% (11 out of 69) for LTAP/OD accidents. Even for SCP accidents, a higher avoidability rate of 17.6% (3 out of 17) was found. This could be due to the fact that in very many cases of LTAP/LD accidents the non-priority car was accelerating from standstill. According to the assumptions defined in the methodology, the FBL is active at standstill and is deactivated when the car starts to accelerate. The FBL needs to be recognised by the driver of the car with priority, as long as the FBL is visible based on the relative angle of the two cars. For LTAP/OD accidents, the majority of the non-priority car drivers (43.5%) braked before negotiating the junction and 18.8% were stationary and thus the FBL was active. However, it is very difficult for the driver of the priority car to accurately judge whether the non-priority car will be able to stop in time or whether it will cross its own line of travel. Therefore, the reaction takes place when the non-priority car crosses its own line of travel. This may explain why the avoidance rate for LTAP/OD accidents is much lower compared with LTAP/LD accidents. For SCP accidents, the speed of the non-priority car remained constant in 34.8% of cases, i.e. the non-priority car did not accelerate or brake before crossing. Regardless of the relative angle between the cars, the FBL is not activated in these accident types and has no effect on accident avoidance. It is clear that safety performance decreases as braking reaction time increases. This effect was observed for all accident types, irrespective of severity.
Collision speed and delta-v have a huge impact on the severity of occupant injuries. There is a significant difference between minor, serious and fatal injuries. In the baseline, the collision speed of the priority car was calculated to be 44.8 km/h (SD=15.9) on average and is much higher for severe injuries (56.2 km/h, SD=24.3) and fatal injuries (70.9 km/h, SD=20.5). For occupant injury risk, delta-v is more important. For the avoidance calculation, however, it is the collision speed that is relevant, i.e. the speed at the time of braking. Stopping distances are highly dependent on driving speed and get longer with increasing speed. This is now reflected in the avoidability analysis. 0.0% (no avoided accidents with a reaction braking time of 1.5 s) to 11.8% of fatal accidents are potentially avoidable with an FBL, but a higher avoidance rate can be seen for severe (10.7% to 14.3%) and minor (8.2% to 20.0%) accidents. Another factor that affects stopping distances is road friction, i.e. the condition of the road. On dry roads, the car can stop faster than on wet roads. Compared with dry roads (12.8% to 27.7%), adverse road conditions show a much lower safety performance (5.8% to 10.2%).
Despite the different speed limits in urban and rural areas, there was no significant difference in safety performance. Avoidance rates range from 10.7% to 25.0% at urban junctions and from 11.4% to 26.1% at rural junctions.
Extrapolating the results to the Austrian national statistics, between 121 and 332 accidents with minor injuries are potentially preventable and a further 231 to 420 accidents could be positively influenced by an FBL (Table 8). The safety performance for severe accidents ranges from 21 to 31 preventable accidents and from 4 to 46 accidents that could be positively influenced. The number of fatal accidents at junctions is generally very low, so the avoidance rate is also low. It is likely that one accident could be prevented and two further accidents influenced by an FBL. Further extrapolation can be calculated with the figures in Appendix B. Although these only refer to the analysed types of accidents, FBL might be able to contribute to traffic safety in many more situations.
According to the European Commission [62,63], almost 18% (3,690) of road users were killed at junctions. With the safety performance of an FBL, up to 220 car-to-car accidents are potentially preventable and 650 positively influenceable, i.e. the consequences of a collision could be mitigated. Unfortunately, a complete picture of severe and minor injuries is not available to the European Union as some countries have failed to provide or are unable to provide this information to the European Commission. Furthermore, there is no detailed information on the number of accidents at junctions with minor and severe injuries. However, it is known that at least one million road users were slightly injured on European roads and some 120 000 were severely injured. It is not possible to say how many of these were victims of accidents at junctions. In an older study from 2009 by Simon et al. [64], the number of injuries from accidents at junctions was 43%, based on figures from the UK, Czech Republic, Italy, Denmark and the Netherlands. Although the proportion of accidents at junctions is likely to have remained the same, no new figures are publicly available. Therefore, no reliable conclusions can be drawn about the reduction of severe and minor injuries with an FBL.
7. Limitations
Although the most common types of accidents are analysed, there are a number of other accident types that are potentially influenceable by an FBL. These additional accidents at junctions where the FBL would be applicable could increase the number of minor injuries by 12.2 %, the number of serious injuries by 8.0 % and the number of fatalities by 9.7 %. The extent to which an FBL could potentially reduce these accidents is not known.
The sample included only accidents involving passenger cars, i.e. a collision between two passenger cars. The proportion of accidents involving only two passenger cars ranges from 20.5% for fatal accidents, 25.8% for serious injuries and 46.2% for minor injuries.
Studies evaluating an intersection collision warning system have shown that braking reaction time can be reduced [36]. Similar results were found for the FBL. The participants in the volunteer tests were able to detect the activation of the brakes of cars equipped with an FBL at an earlier stage [24]. However, there is no information on reaction braking time, i.e. reaction perception times in real traffic conditions with an FBL. Therefore, different reaction times were distinguished. This gives a range of effects of an FBL rather than a single estimate. The real figure may be somewhere in between but reflects the wide range of different road users (e.g. young drivers, older drivers, women, men, etc.).
Petzold et al. [25] recommend analysing the visibility of the FBL in different lighting conditions. However, there are no studies on the visibility of FBL in different lighting conditions. Therefore, it was assumed that the driver of the priority vehicle would see the FBL in all conditions.
Cases where the driver had already responded on request were not analysed separately. In these cases, an FBL may not have any additional benefit. However, if an FBL caused the driver to brake earlier in these cases, this would also be beneficial.
In addition to the relative position of the two cars, the visibility of the FBL depends on the length of the light at the front of the car. At a very unfavourable angle, only about 8.7 cm to 17.4 cm of a total length of 50 cm or 100 cm could be visible as a protruding line. If there is a large distance between the two cars, it may be difficult for the driver of the priority car to see the FBL. This has not been taken into account. It was assumed that the drivers of the priority car would see the FBL and initiate a braking manoeuvre.
8. Conclusion
The study showed that an aftermarket safety system could reduce the number of accidents and mitigate their consequences. FBL is a passive system that relies on the braking behaviour of other road users. FBL is a passive system that relies on the braking behaviour of other road users. Compared to in-vehicle warning systems or autonomous intervention systems, FBL has a high avoidance rate. In addition, a large number of accidents could be positively influenced by reducing the impact speed and thus mitigating the consequences in the event of an impact. Although the safety performance of an FBL is based on the assumption that all cars are equipped with this system, the FBL is a promising driver assistance system. However, the avoidance possibilities are highly dependent on the visibility of the FBL. This was not the case in almost a third of the accident situations. Especially in accident situations where the relative angle between the cars is unfavourable, i.e. the driver of the car with priority cannot see the FBL. In order to improve the safety performance, it is suggested to investigate whether the FBL can be mounted on the side of the car to increase visibility. As the sample analysed was limited to accidents involving only two passenger cars, the safety performance of an FBL in accidents involving other collision partners, such as trucks, motorcycles or pedestrians, is not assessed. These road users should be taken into consideration in a subsequent analysis.
Author Contributions
“Conceptualization, E.T.; methodology, E.T.; formal analysis, E.T.; investigation, E.T.; data curation, E.T.; writing—original draft preparation, E.T.; writing—review and editing, B.K.; W.S.; All authors have read and agreed to the published version of the manuscript.”
Funding
“This research received no external funding”; The APC was funded by TU Graz Open Access Publishing Fund. Open Access Funding by the Graz University of Technology.
Conflicts of Interest
“The authors declare no conflicts of interest.”
Abbreviations
The following abbreviations are used in this manuscript:
| ABS | Anti-lock Braking System |
| AEB | Emergency Braking Assist |
| CEDATU | Central Database for In-Depth Accident Study |
| FBL | Front Brake Light |
| FCW | Frontal Collision Warning |
| FOT | Field Operational Tests |
| LTAP/LD | Left Turn Across Path/Left Direction |
| LTAP/OD | Left Turn Across Path/Opposite Direction |
| NCAP | New Car Assessment Programme |
| NDS | Naturalistic Driving Study |
| SCP | Straight Crossing Path |
| SD | Standard Deviation |
Appendix A

Table A1.
Accident types at junctions.
| Accident type | Pictogram | Description |
| 311 RT/SDRE |
 |
Collision with a vehicle which is turning right at a junction (Right Turn / Same Direction Rear End) |
| 312 RT/SDR |
 |
Collision of a vehicle which is turning right with another vehicle which is passing by and moving straight at a junction (Left Turn / Same Direction Right) |
| 313 RT/RTSD |
 |
Lateral collision between two vehicles turning right at the same time at a junction (Right Turn / Right Turn Same Direction) |
| 321 LT/SDRE |
 |
Collision with a vehicle which is turning left at a junction (Left Turn / Same Direction Rear End) |
| 322 LT/SDL |
 |
Collision of a vehicle which is turning left with another vehicle which is overtaking or passing by at a junction (Left Turn / Same Direction Left) |
| 323 LT/LTSD |
 |
Lateral collision between two vehicles turning left at the same time at a junction (Left Turn / Left Turn Same Direction) |
| 331 UT/SDJ |
 |
Collision at a junction between a vehicle making a u-turn from the right lane and a vehicle travelling straight ahead on the left lane (U-Turn/Same Direction Junction) |
| 332 UD/SD |
 |
Collision at mid-block between a vehicle making a u-turn from the right lane and a vehicle travelling straight ahead on the left lane |
| 391 OTSD |
 |
Other accidents when turning or making a u-turn, travelling in the same direction (Other Turn/Same Direction) |
| 411 LTAP/OD |
 |
Collision between a vehicle turning left and another vehicle coming from the opposite direction and travelling straight ahead (Left Turn Across Path/Opposite Direction) |
| 421 LT/LTOD |
 |
Lateral collision between two vehicles turning left in opposite directions (Left Turn/Left Turn Opposite Direction) |
| 431 RT/LTOD |
 |
Collision between a vehicle turning right and another vehicle turning left coming from the opposite direction (Right Turn / Left Turn Opposite Direction) |
| 451 RT/OD |
 |
Collision between a vehicle turning right and another vehicle (bicycle, tram) travelling in the opposite direction on a special lane (e.g. cycle lane, tram, right of way) (Right Turn / Opposite Direction) |
| 461 UT/ODJ |
 |
Collision between a vehicle making a U-turn and another vehicle travelling in the opposite direction at a junction (U-Turn / Opposite Direction Junction) |
| 462 UT/OD |
 |
Collision between a vehicle making a U-turn and another vehicle travelling in the opposite direction at mid-block |
| 491 OT/OD |
 |
other accidents when turning or making a U-turn, travelling in opposite direction (Other Turn / Opposite Direction) |
| 511 SCP |
 |
Collision at a junction between two vehicles travelling at right angles to each other (Straight Crossing Path) |
| 591 SCPO |
 |
Other collision at a junction between two vehicles travelling at right angles to each other (Straight Crossing Path Other) |
| 611 RT/LD |
 |
Collision at a junction of a vehicle which is turning right and a vehicle coming from left and is crossing straight (Right Turn / Left Direction) |
| 612 LT/RD |
 |
Collision at a junction of a vehicle which is turning left and a vehicle coming from right and is crossing straight (Left Turn / Right Direction) |
| 621 RT/RD |
 |
Collision at a junction of a vehicle which is turning right and a vehicle coming from right and is crossing straight (Right Turn / Right Direction) |
| 622 LTAP/LD |
 |
Collision at a junction of a vehicle which is turning left and a vehicle coming from left and is crossing straight (Left Turn Across Path / Left Direction) |
| 631 RT/RT |
 |
Collision at a junction of a vehicle which is turning right and another vehicle coming from the left, also turning right (Right Turn / Right Direction) |
| 632 LT/LTRD |
 |
Collision at a junction between a vehicle turning left and another vehicle coming from the left, also turning left (Left Turn / Left Turn Right Direction) |
| 633 RT/LTRD |
 |
Collision at a junction of a vehicle which is turning right and another vehicle coming from the right and turning left (Right Turn / Left Turn Right Direction) |
| 691 OT |
 |
Other turning accidents – collisions between vehicles turning either right or left (Other Turning / Left or Right) |
Appendix B
Table A2.
Accidents at junctions involving two passenger cars between 2012 and 2023 in Austria according to the accident site [65].
Table A2.
Accidents at junctions involving two passenger cars between 2012 and 2023 in Austria according to the accident site [65].
| Accident site | Minor injury | Severe injury | Fatal injury | Total |
| Urban | 10 351 | 1 789 | 56 | 12 196 |
| Rural | 24 758 | 1 596 | 16 | 26 370 |
| Total | 35 109 | 3 385 | 72 | 38 566 |
Table A3.
Accidents at junctions involving two passenger cars between 2012 and 2023 in Austria according to the road condition [65].
Table A3.
Accidents at junctions involving two passenger cars between 2012 and 2023 in Austria according to the road condition [65].
| Road condition | Minor injury | Severe injury | Fatal injury | Total |
| Dry | 26 727 | 2 631 | 56 | 29 414 |
| Adverse road (wet, snow/snow slush) | 8 382 | 754 | 16 | 9 152 |
| Total | 35 109 | 3 385 | 72 | 38 566 |
Table A4.
Accidents at junctions involving two passenger cars between 2012 and 2023 in Austria according to the light condition [65].
Table A4.
Accidents at junctions involving two passenger cars between 2012 and 2023 in Austria according to the light condition [65].
| Light condition | Minor injury | Severe injury | Fatal injury | Total |
| Daylight | 25 665 | 2 474 | 55 | 28 194 |
| Darkness, Twilight/Dawn | 4 920 | 547 | 15 | 5 482 |
| Artificial light | 4 524 | 364 | 2 | 4 890 |
| Total | 35 109 | 3 385 | 72 | 38 566 |
Table A5.
Accidents at junctions involving two passenger cars according to the accident type between 2012 and 2023 in Austria [65].
Table A5.
Accidents at junctions involving two passenger cars according to the accident type between 2012 and 2023 in Austria [65].
| Accident type | Minor injury | Severe injury | Fatal injury | Total |
| RT/SDRE | 907 | 15 | 922 | |
| RT/SDR | 294 | 21 | 315 | |
| RT/RTSD | 74 | 3 | 77 | |
| LT/SDRE | 1 249 | 69 | 1 318 | |
| LT/SDL | 1 174 | 117 | 5 | 1 296 |
| LT/LTSD | 77 | 1 | 78 | |
| UT/SDJ | 190 | 27 | 217 | |
| OTSD | 352 | 16 | 1 | 369 |
| LTAP/OD | 6 489 | 834 | 10 | 7 333 |
| LT/LTOD | 68 | 5 | 73 | |
| RT/LTOD | 109 | 6 | 115 | |
| UT/ODJ | 119 | 15 | 134 | |
| OT/OD | 234 | 18 | 252 | |
| SCP | 14 103 | 1 310 | 35 | 15 448 |
| SCPO | 206 | 20 | 226 | |
| RT/LD | 1 352 | 87 | 4 | 1 443 |
| LT/RD | 1 381 | 75 | 3 | 1 459 |
| RT/RD | 454 | 37 | 491 | |
| LTAP/LD | 5 263 | 649 | 14 | 5 926 |
| RT/RT | 56 | 4 | 60 | |
| LT/LTRD | 388 | 20 | 408 | |
| RT/LTRD | 254 | 15 | 269 | |
| OTLR | 316 | 21 | 337 | |
| All junction accidents | 35 109 | 3 385 | 72 | 38 566 |
| All other accidents | 54 546 | 4 565 | 404 | 59 515 |
| Total | 89 655 | 7 950 | 476 | 98 081 |
Appendix C
Table A6.
Number of potentially preventable and influenceable accidents due to an FBL for different accident types.
Table A6.
Number of potentially preventable and influenceable accidents due to an FBL for different accident types.
| Accident type | Injury severity | Safety performance | Reaction time 0.5s | Reaction time 1.0s | Reaction time 1.5s |
| LTAP/OD | Fatal | Baseline | 10 | 10 | 10 |
| FBL visible | 10 | 10 | 10 | ||
| Preventable | 0 | 0 | 0 | ||
| Influenceable | 5 | 1 | 0 | ||
| No effect | 5 | 9 | 10 | ||
| Severe | Baseline | 19 | 19 | 19 | |
| FBL visible | 19 | 19 | 19 | ||
| Preventable | 4 | 3 | 3 | ||
| Influenceable | 5 | 3 | 0 | ||
| No effect | 10 | 13 | 16 | ||
| Minor | Baseline | 40 | 40 | 40 | |
| FBL visible | 40 | 40 | 40 | ||
| Preventable | 7 | 3 | 3 | ||
| Influenceable | 18 | 8 | 4 | ||
| No effect | 15 | 29 | 33 | ||
| Total | Baseline | 69 | 69 | 69 | |
| FBL visible | 69 | 69 | 69 | ||
| Preventable | 11 | 6 | 6 | ||
| Influenceable | 28 | 12 | 4 | ||
| No effect | 30 | 51 | 59 | ||
| SCP | Fatal | Baseline | 11 | 11 | 11 |
| FBL visible | 1 | 1 | 1 | ||
| Preventable | 0 | 0 | 0 | ||
| Influenceable | 0 | 0 | 0 | ||
| No effect | 11 | 11 | 11 | ||
| Severe | Baseline | 20 | 20 | 20 | |
| FBL visible | 7 | 7 | 7 | ||
| Preventable | 1 | 0 | 0 | ||
| Influenceable | 2 | 1 | 0 | ||
| No effect | 17 | 19 | 20 | ||
| Minor | Baseline | 37 | 37 | 37 | |
| FBL visible | 9 | 9 | 9 | ||
| Preventable | 2 | 2 | 0 | ||
| Influenceable | 3 | 1 | 3 | ||
| No effect | 32 | 34 | 34 | ||
| Total | Baseline | 68 | 68 | 68 | |
| FBL visible | 17 | 17 | 17 | ||
| Preventable | 3 | 2 | 0 | ||
| Influenceable | 5 | 2 | 3 | ||
| No effect | 60 | 64 | 65 | ||
| LTAP/LD | Fatal | Baseline | 13 | 13 | 13 |
| FBL visible | 12 | 12 | 12 | ||
| Preventable | 4 | 3 | 0 | ||
| Influenceable | 7 | 3 | 4 | ||
| No effect | 2 | 7 | 9 | ||
| Severe | Baseline | 17 | 17 | 17 | |
| FBL visible | 9 | 9 | 9 | ||
| Preventable | 3 | 3 | 3 | ||
| Influenceable | 5 | 3 | 1 | ||
| No effect | 9 | 11 | 13 | ||
| Minor | Baseline | 33 | 33 | 33 | |
| FBL visible | 23 | 23 | 23 | ||
| Preventable | 13 | 8 | 6 | ||
| Influenceable | 6 | 9 | 6 | ||
| No effect | 14 | 16 | 21 | ||
| Total | Baseline | 63 | 63 | 63 | |
| FBL visible | 44 | 44 | 44 | ||
| Preventable | 20 | 14 | 9 | ||
| Influenceable | 18 | 15 | 11 | ||
| No effect | 25 | 34 | 43 | ||
| Total | Fatal | Baseline | 34 | 34 | 34 |
| FBL visible | 23 | 23 | 23 | ||
| Preventable | 4 | 3 | 0 | ||
| Influenceable | 12 | 4 | 4 | ||
| No effect | 18 | 27 | 30 | ||
| Severe | Baseline | 56 | 56 | 56 | |
| FBL visible | 35 | 35 | 35 | ||
| Preventable | 8 | 6 | 6 | ||
| Influenceable | 12 | 7 | 1 | ||
| No effect | 36 | 43 | 49 | ||
| Minor | Baseline | 110 | 110 | 110 | |
| FBL visible | 72 | 72 | 72 | ||
| Preventable | 22 | 13 | 9 | ||
| Influenceable | 27 | 18 | 13 | ||
| No effect | 61 | 79 | 88 | ||
| Total | Baseline | 200 | 200 | 200 | |
| FBL visible | 130 | 130 | 130 | ||
| Preventable | 34 | 22 | 15 | ||
| Influenceable | 51 | 29 | 18 | ||
| No effect | 115 | 149 | 167 |
Appendix D
The following examples show how the safety performance of an FBL was assessed.
Appendix D.1. LTAP/OD Accidents
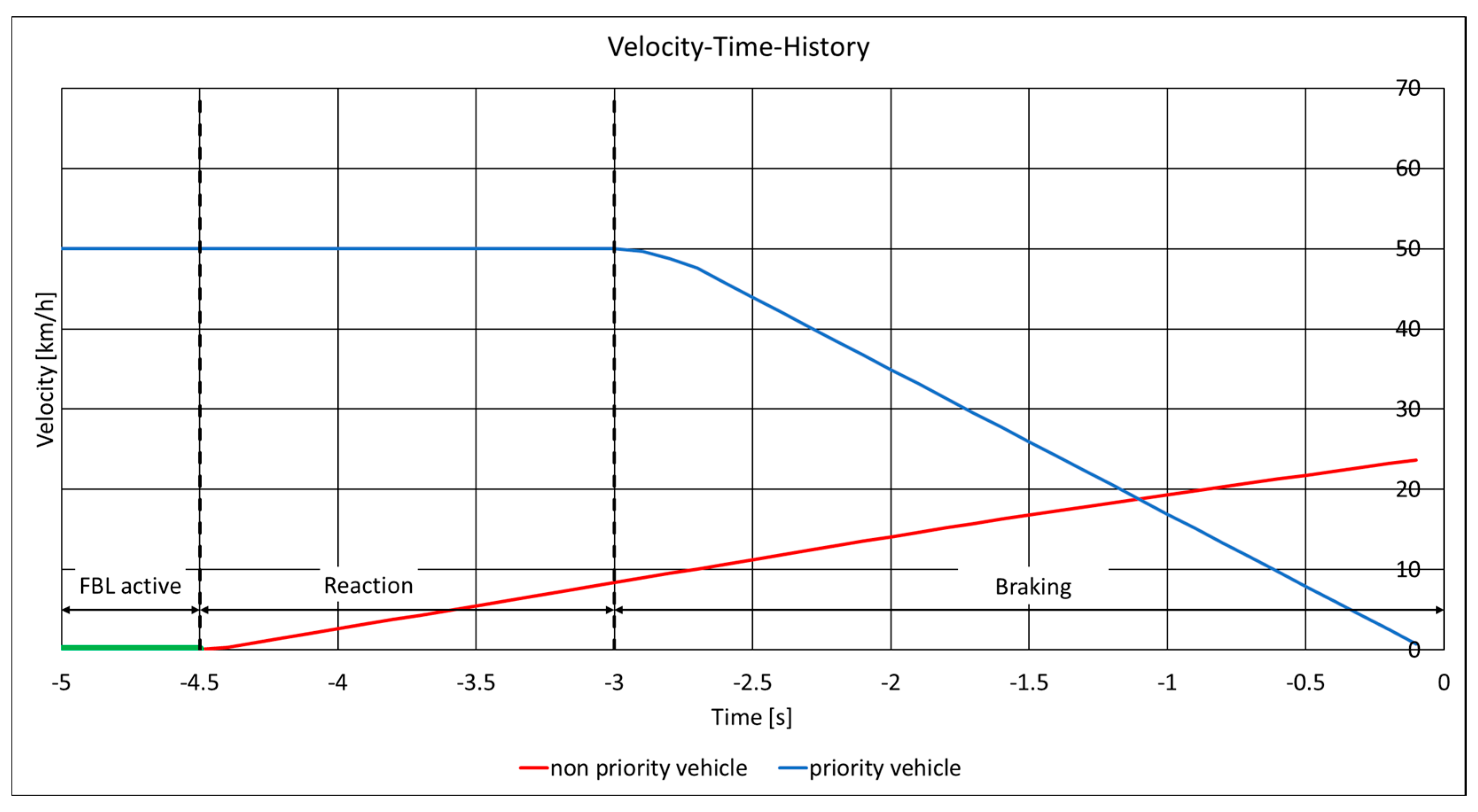
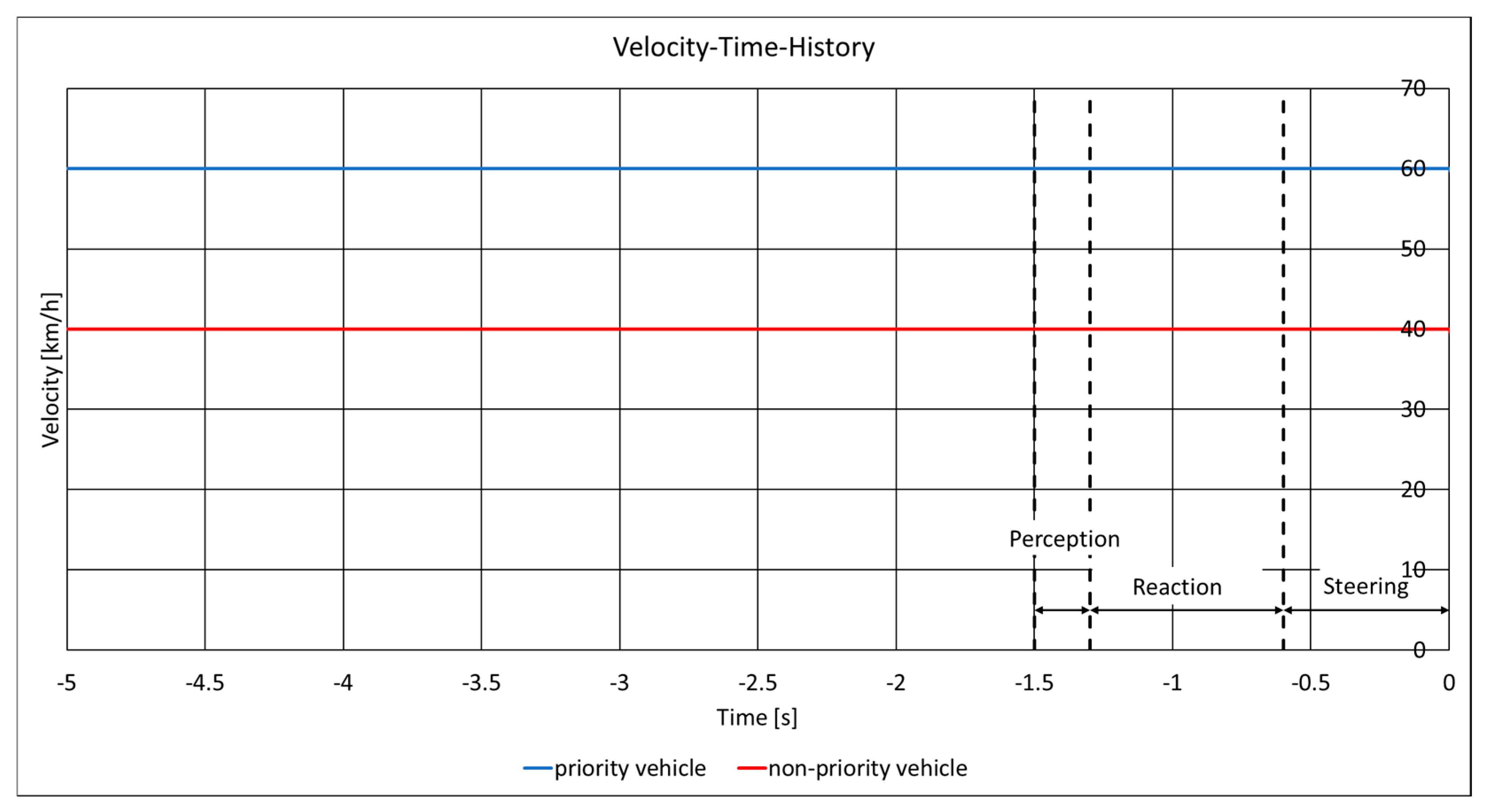
The non-priority vehicle (red) turns left. The oncoming vehicle on the priority road (blue) is not detected even though it is in the field of view of the driver of the non-priority vehicle. Figure A1 shows the different phases of the accident. 4.45 s prior to the collision, the non-priority vehicle starts to accelerate and initially moves straight ahead. This is when the conflict begins. In this phase, the priority vehicle cannot see whether the non-priority vehicle is still stationary or has already started to accelerate. The non-priority car starts to steer and enters the lane of the priority car 1.8 s before the collision. At this point, the priority car is prompted to react. Given a perception time of 0.8 s, the priority vehicle reacts 1.0 s before the collision. Unfortunately, no reduction in speed is possible as the remaining one second is the reaction time. The initial speed of 50 km/h cannot be reduced and the priority vehicle collides with the non-priority vehicle at 50 km/h. From the perspective of the priority vehicle, this crash was unavoidable. The driver of the priority vehicle had responded as quickly as possible. Figure A2 shows the speed-time curves of the two vehicles.
Figure A1.
Accident phases for the LTAP/OD accidents.
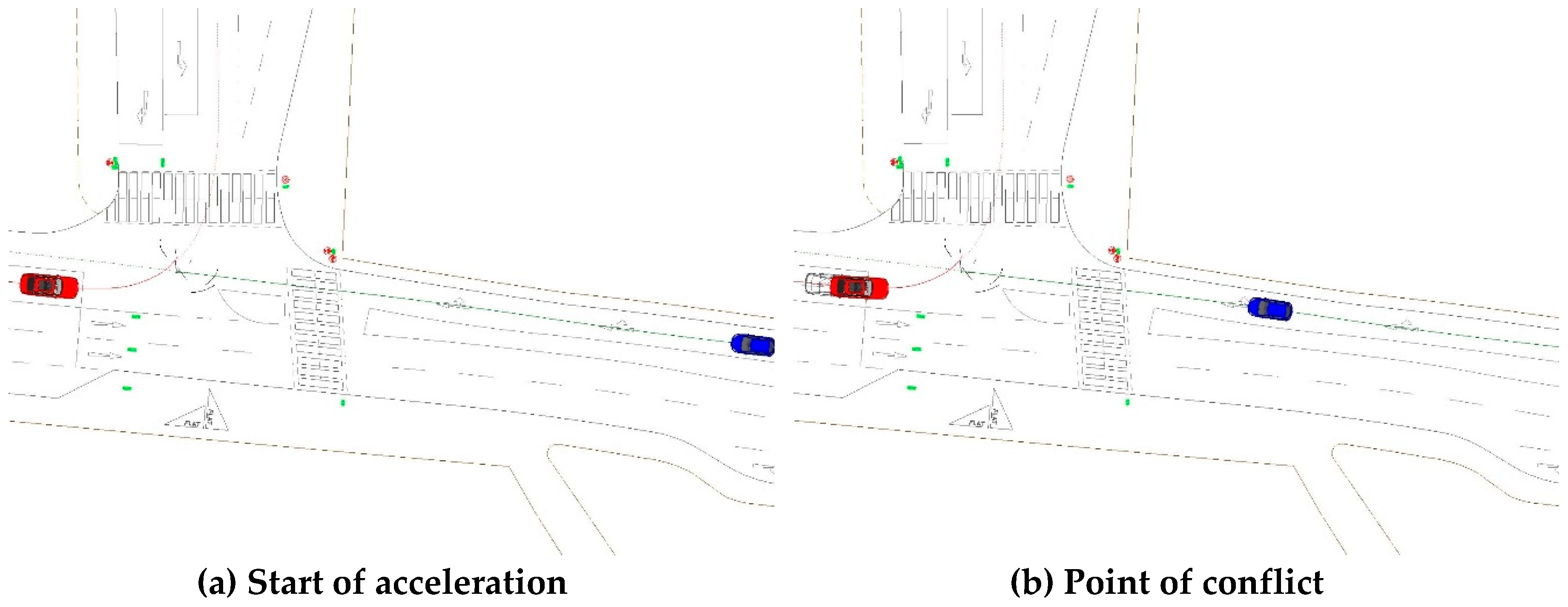
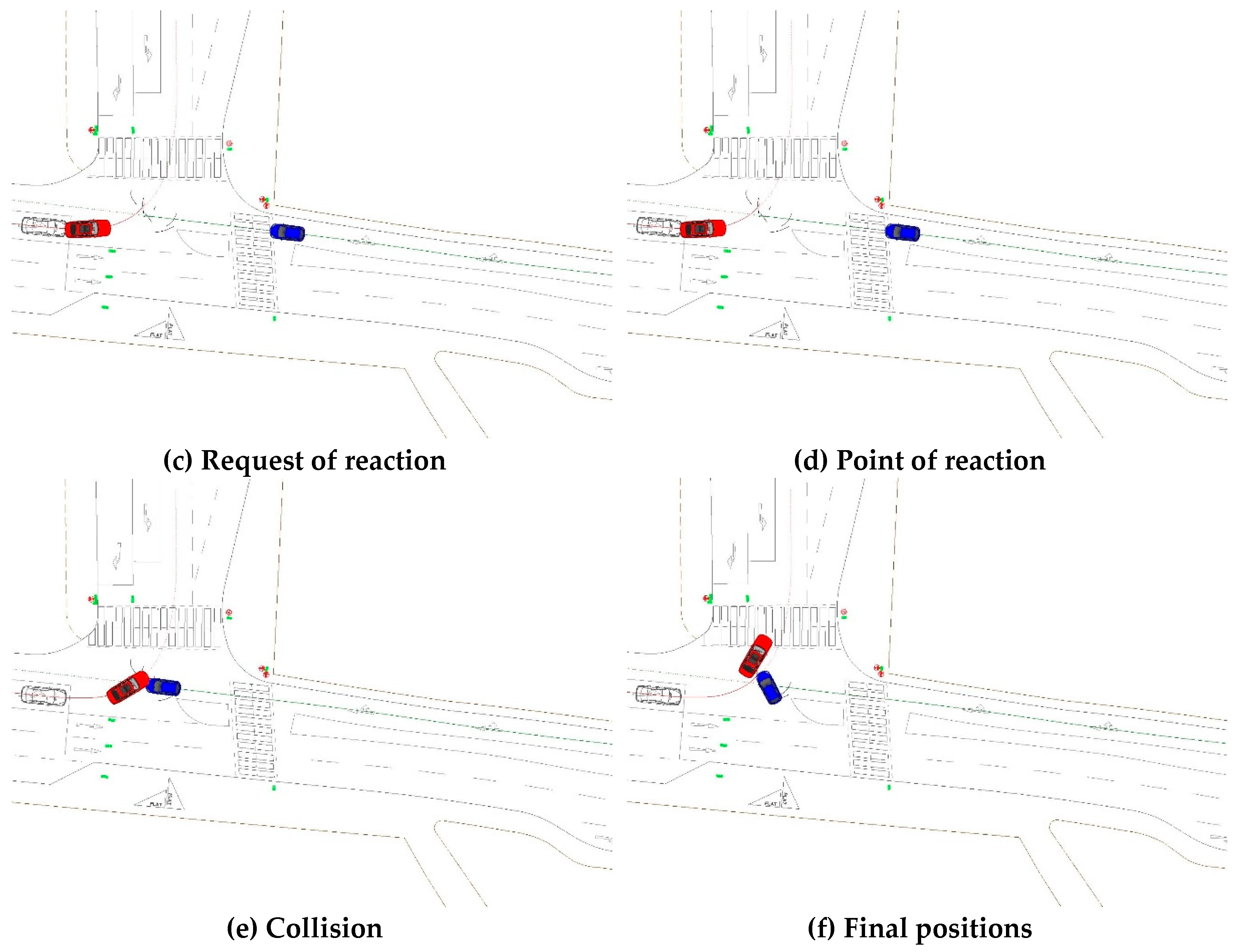
Figure A2.
Velocity-time-history for the LTAP/OD accidents.
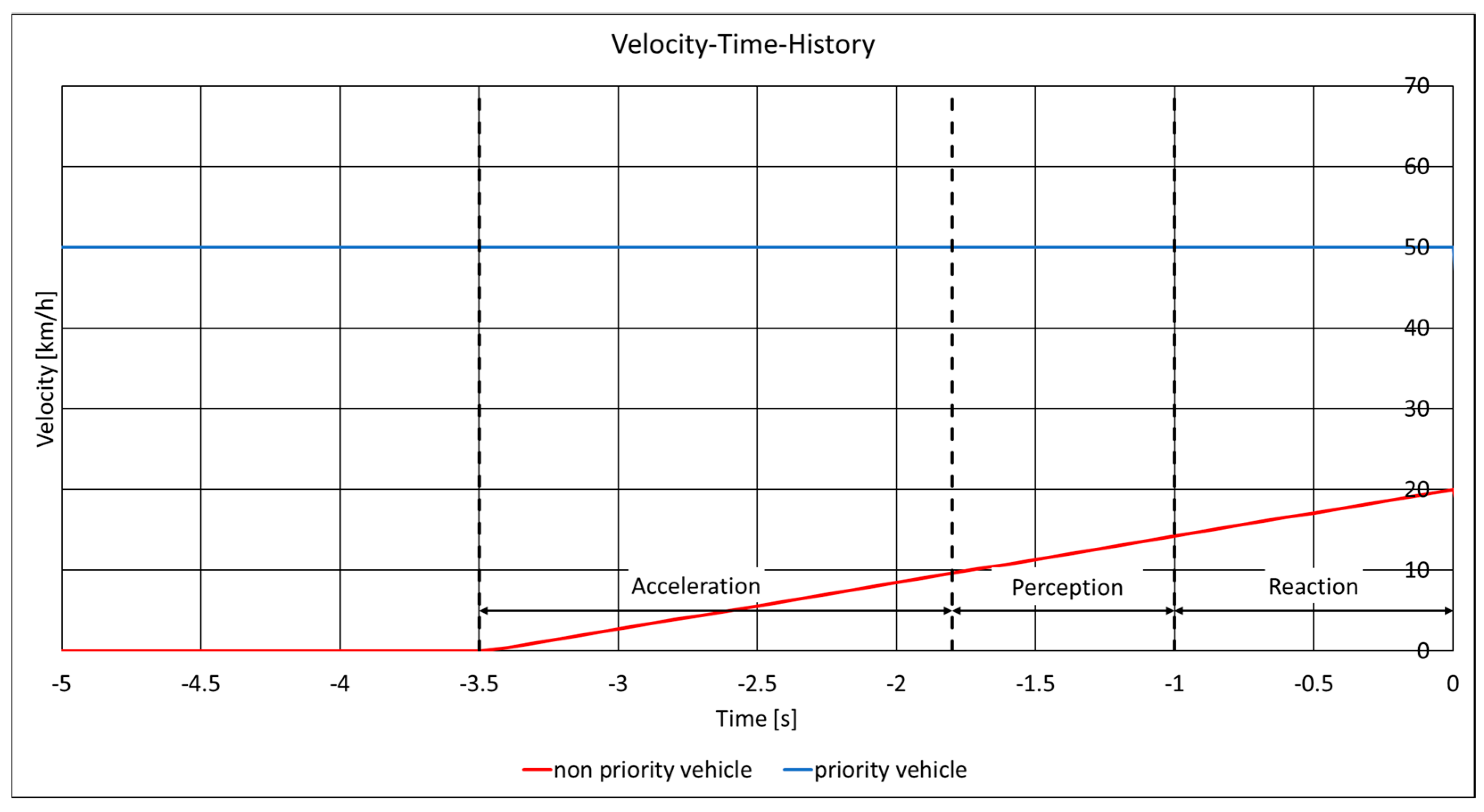
The non-priority vehicle is now equipped with an FBL. The FBL is active when the car is stationary. It is assumed that the FBL is visible to the driver of the priority vehicle. When the non-priority vehicle starts to accelerate, the FBL is deactivated and it is assumed that the driver of the priority vehicle will react. In the example given, a reaction braking time of 1.5 s is simulated. The priority vehicle has come to a complete halt approximately five metres in front of the collision point (Figure A3). Although the reaction braking time was assumed to be very long, the priority vehicle would be able to avoid the collision. With a shorter reaction braking time, the collision is avoided in any case.
Figure A3.
Acceleration phase / point of reaction and final position of the vehicles for the LTAP/OD accidents when the vehicle is equipped with an FBL and the FBL is active before the non-priority vehicle starts to accelerate.
Figure A3.
Acceleration phase / point of reaction and final position of the vehicles for the LTAP/OD accidents when the vehicle is equipped with an FBL and the FBL is active before the non-priority vehicle starts to accelerate.
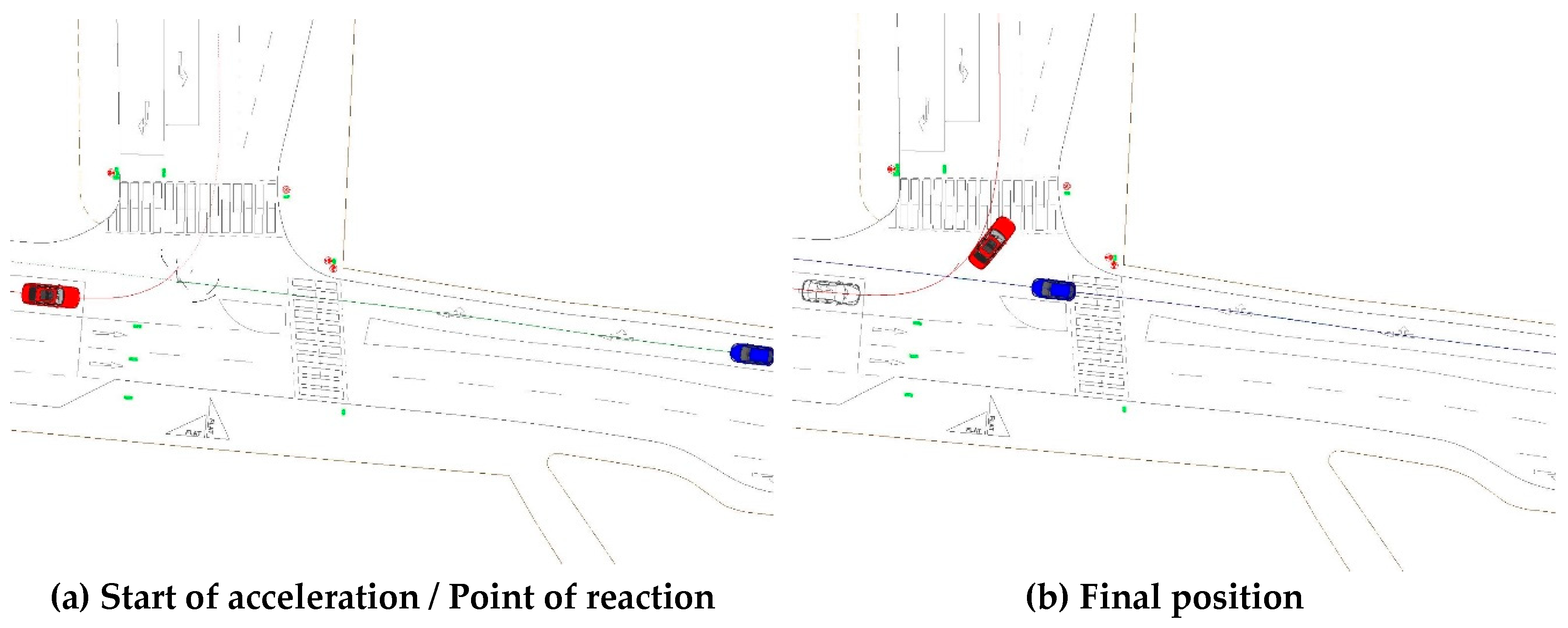
Figure A4.
Velocity-time-history for the LTAP/OD accidents when the vehicle is equipped with an FBL and the FBL is active before the non-priority vehicle starts to accelerate.
Figure A4.
Velocity-time-history for the LTAP/OD accidents when the vehicle is equipped with an FBL and the FBL is active before the non-priority vehicle starts to accelerate.
Appendix D.2. LTAP/LD Accidents
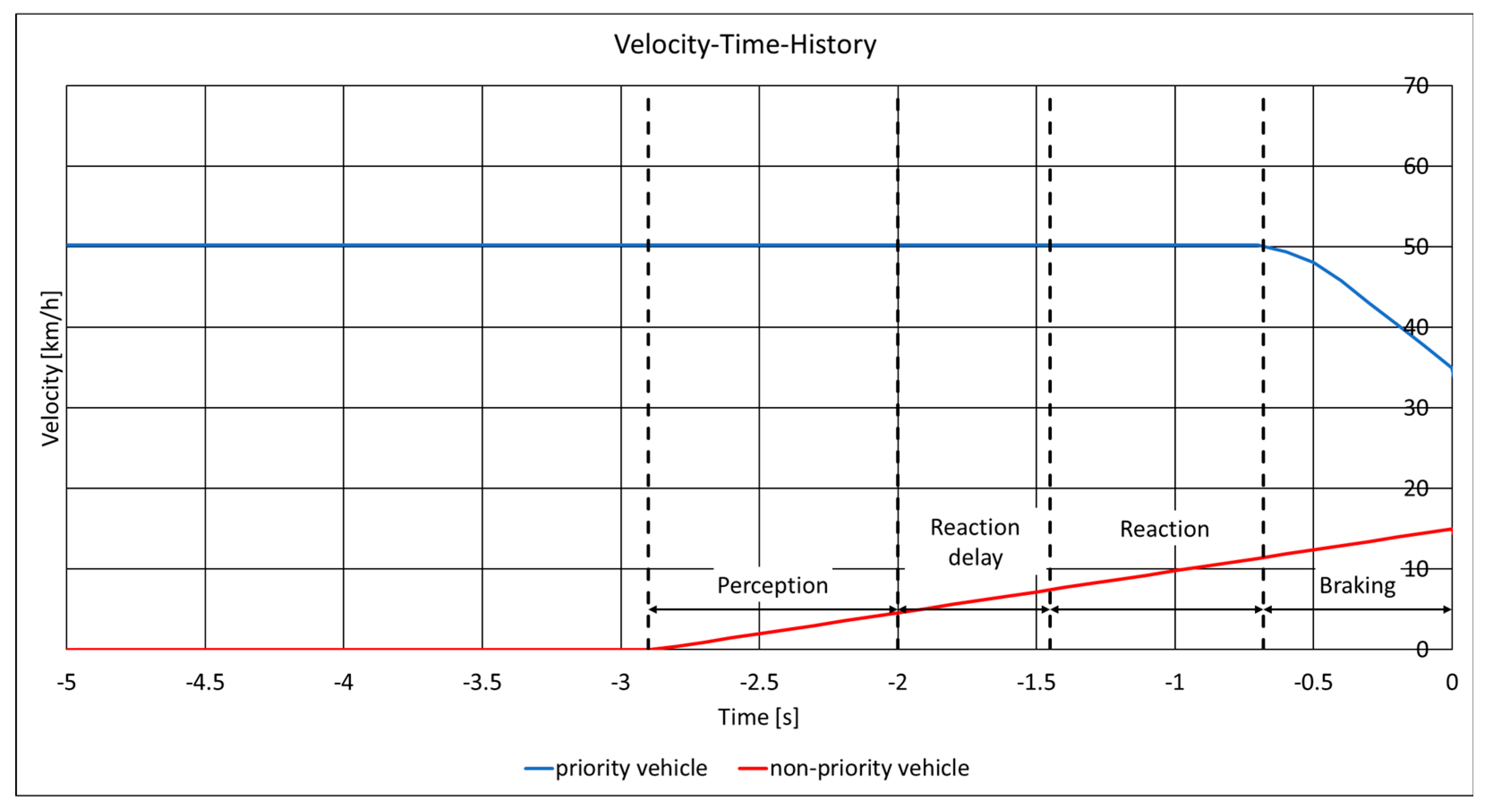
The non-priority vehicle (red) turns left. The vehicle coming from the left on the priority road (blue) is not detected even though it is in the field of view of the driver of the non-priority vehicle. Figure A5 shows the different phases of the accident. 2.9 s before the collision, the non-priority vehicle starts to accelerate and enters the junction. After a perception time of 0.8 s, the priority vehicle has to react, i.e. 2.0 s before the collision. The driver of the priority vehicle reacts 1.45 s prior to the collision. The braking phase starts 0.68 s before the collision and the initial speed of 50 km/h can still be reduced to 35 km/h. The driver of the priority vehicle reacts with a delay of 0.55 s and collides with the non-priority vehicle. This crash could have been avoided if the driver of the vehicle with priority had reacted in time. Figure A6 shows the speed-time curves of the two vehicles.
Figure A5.
Accident phases for the LTAP/LD accidents.
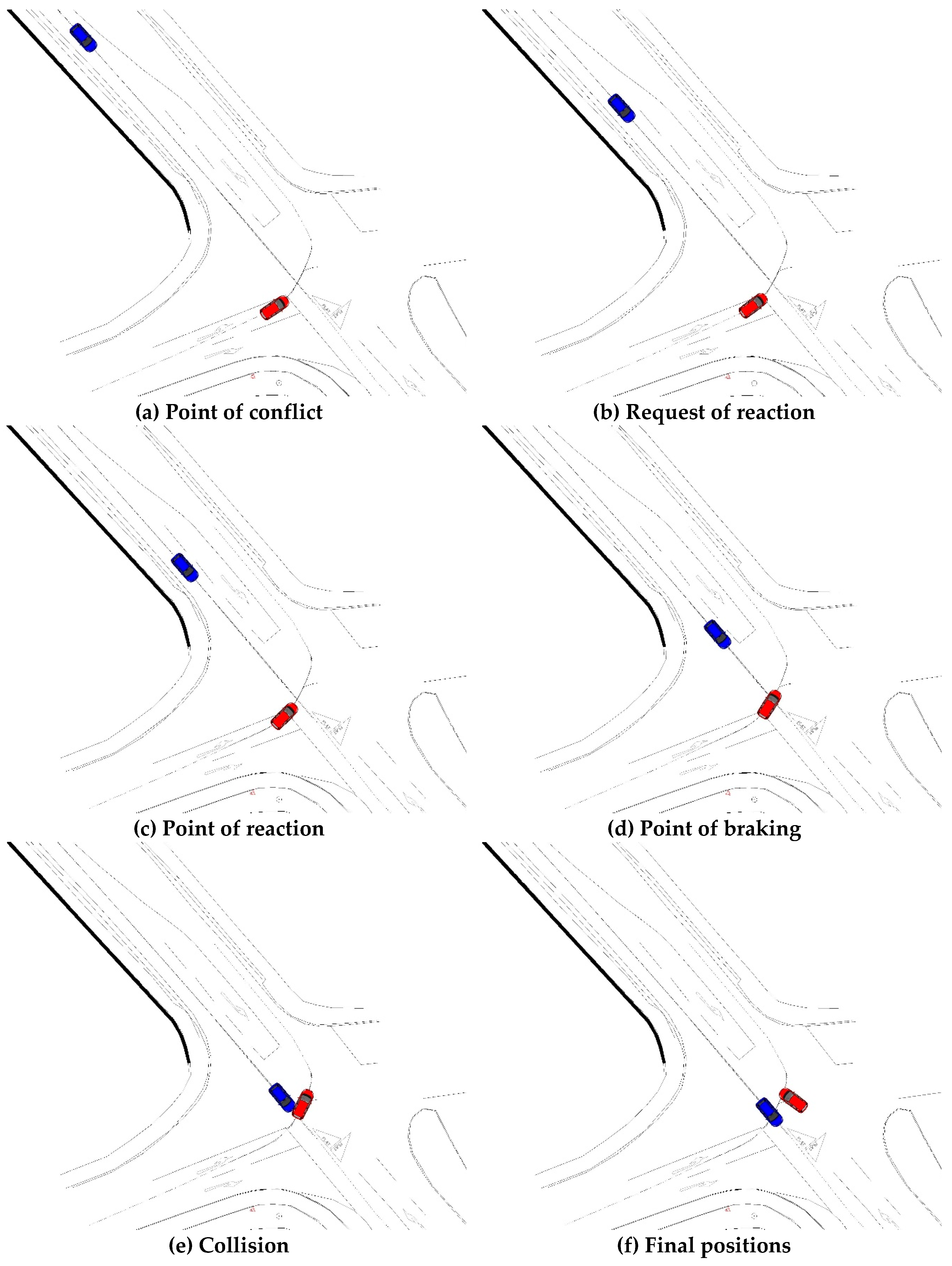
Figure A6.
Velocity-time-history for the LTAP/LD accidents.
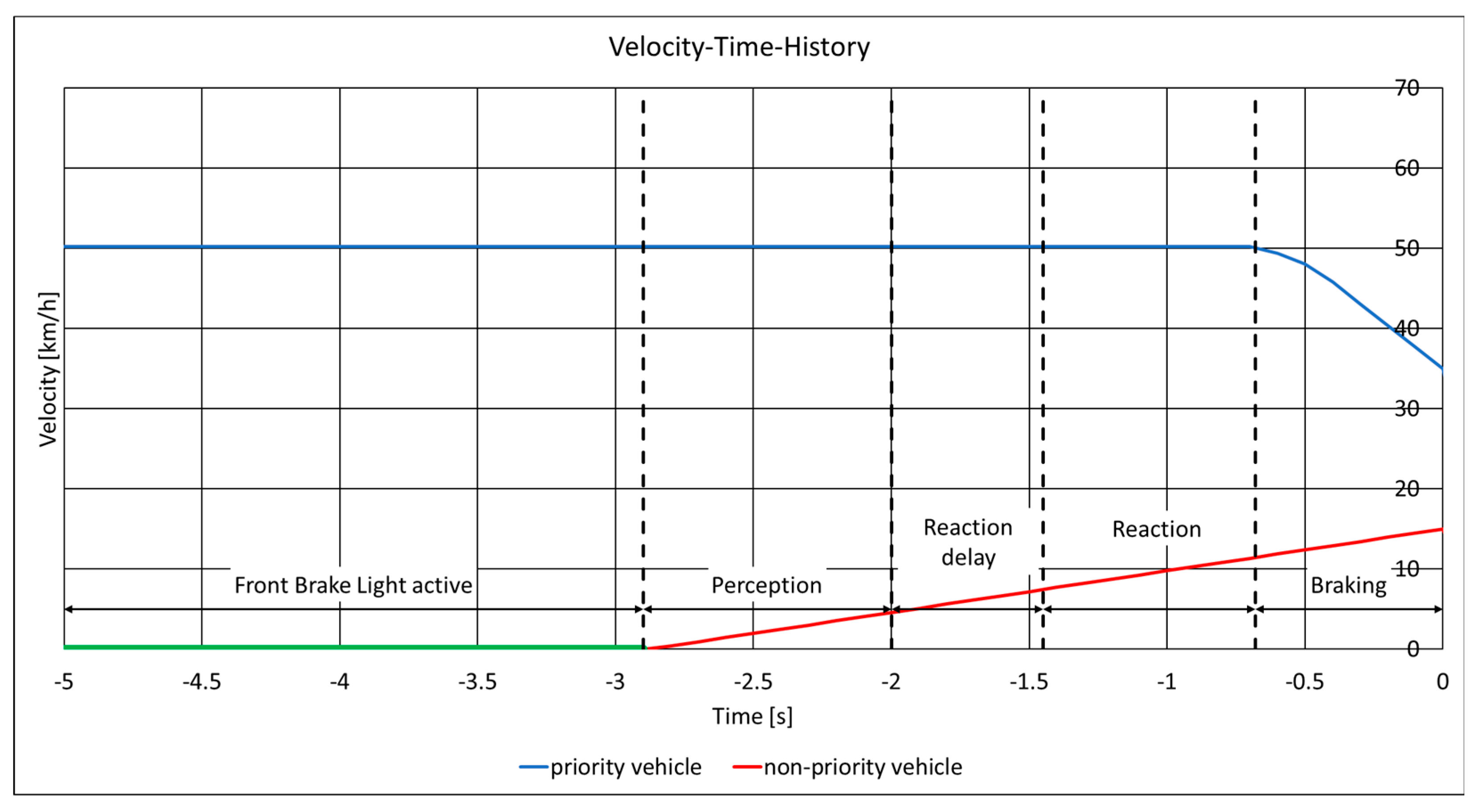
In the counterfactual simulation, the non-priority vehicle is equipped with an FBL. The FBL is active until the non-priority vehicle starts to accelerate (Figure A7). However, due to the relative angle configuration between the two vehicles (85°), the FBL is not visible to the driver of the priority vehicle. The driver is assumed to behave as in the baseline. The collision remains the same and the collision is not prevented by a FBL.
Figure A7.
Velocity-time-history for the LTAP/LD accidents prior to the collision when the vehicle is equipped with an FBL and the FBL is active before the non-priority vehicle starts to accelerate.
Figure A7.
Velocity-time-history for the LTAP/LD accidents prior to the collision when the vehicle is equipped with an FBL and the FBL is active before the non-priority vehicle starts to accelerate.
Appendix D.3. SCP Accidents
At a junction, the non-priority vehicle (red) went straight ahead and did not yield at the stop sign. Figure A8 shows the different phases of the accident. The view to the right was obstructed by a wall, thus the driver of the priority vehicle was not able to see the non-priority vehicle until 1.5 s prior to the collision. At 1.3 s prior to the collision, the non-priority car crossed the stop line. At this point, the driver of the vehicle with priority reacted and attempted to avoid a collision with an emergency steering manoeuvre to the left. If the priority vehicle had braked instead of steering, the collision speed would have been reduced from 50 km/h to 37 km/h and the impact configuration would have changed. The priority vehicle would have had a frontal collision instead of a side collision, and vice versa for the non-priority vehicle. From the perspective of the priority vehicle, this crash was unavoidable. The driver of the priority vehicle had responded as quickly as possible. Figure A9 shows the speed-time curves of the two vehicles.
Although the non-priority vehicle is equipped with an FBL in the counterfactual simulation, the FBL is not active because the vehicle is moving at a constant speed without braking before the crash. Furthermore, the relative angle between the two vehicles is 80° and would in no way be visible. In this case, an FBL would not be effective in preventing a collision.
Figure A8.
Accident phases for the SCP accidents.
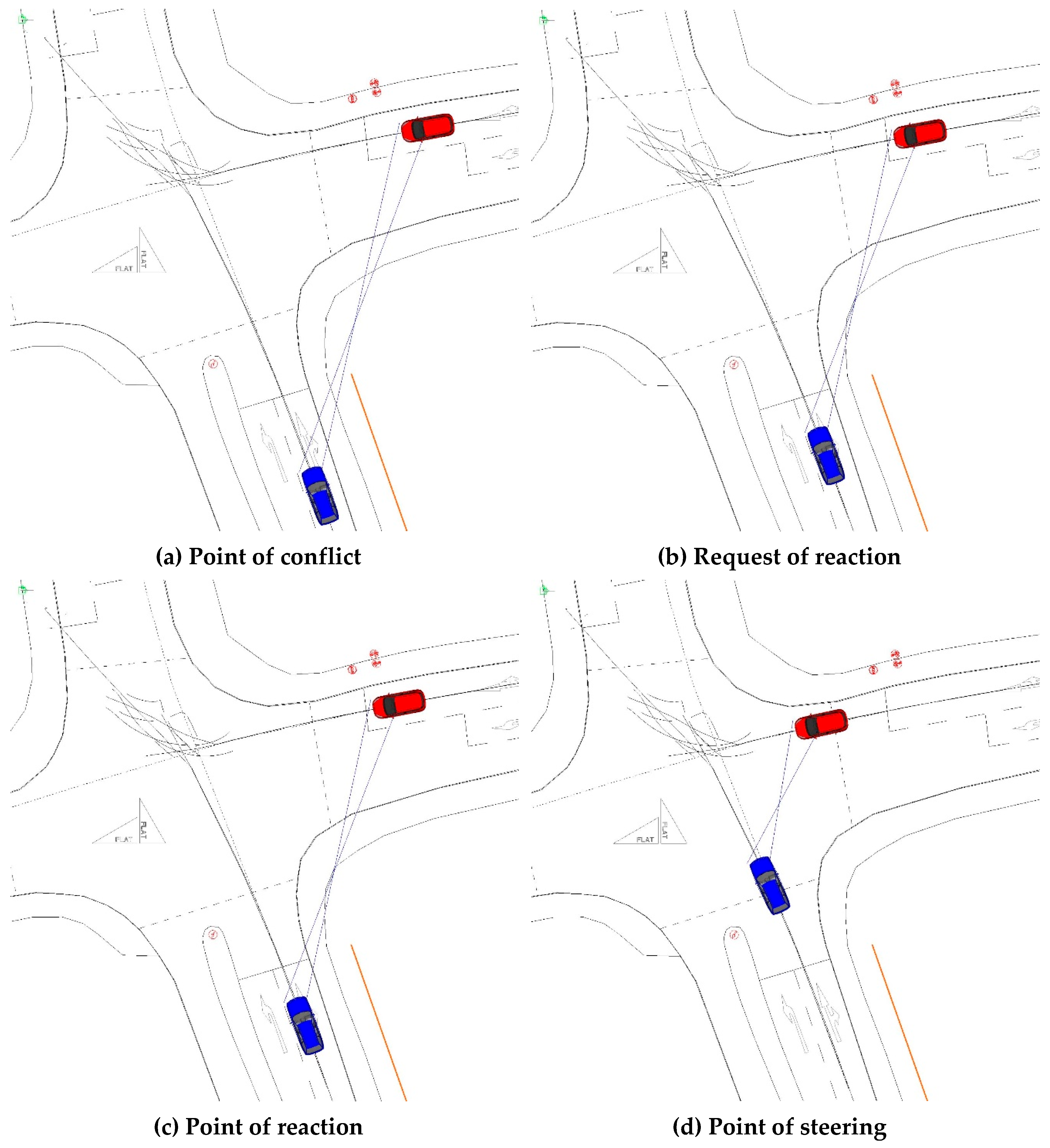
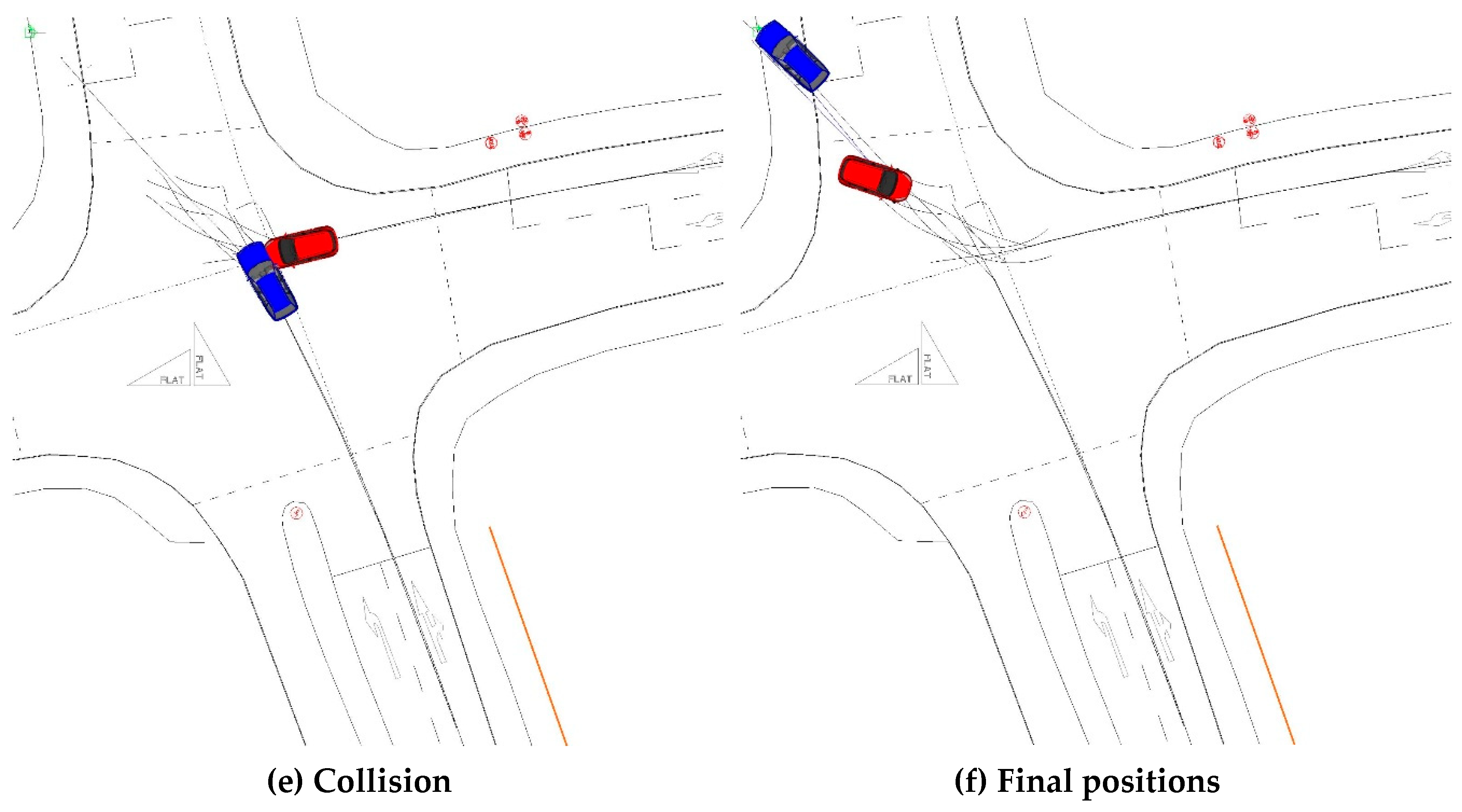
Figure A9.
Velocity-time-history for the SCP accidents.
References
- K.M. Marshek, J.F. Cuderman, M.J. Johnson, Performance of Anti-Lock Braking System Equipped Passenger Vehicles - Part I: Braking as a Function of Brake Pedal Application Force, Warrendale, PA, 2002.
- S.-H. Chang, C.-Y. Lin, C.-C. Hsu, C.-P. Fung, J.-R. Hwang, The effect of a collision warning system on the driving performance of young drivers at intersections, Transportation Research Part F: Traffic Psychology and Behaviour 12 (2009) 371–380. [CrossRef]
- J.M. Scanlon, R. Sherony, H.C. Gabler, Preliminary potential crash prevention estimates for an Intersection Advanced Driver Assistance System in straight crossing path crashes, in: 2016 IEEE Intelligent Vehicles Symposium (IV), IEEE, 2016 - 2016, pp. 1135–1140. [CrossRef]
- J. Scanlon, R. Sherony, H. Gabler, Preliminary Effectiveness Estimates for Intersection Driver Assistance Systems in LTAP/OD Crashes, in: FAST-zero'17, 2017.
- J.M. Scanlon, R. Sherony, H.C. Gabler, Injury mitigation estimates for an intersection driver assistance system in straight crossing path crashes in the United States, Traffic Inj Prev 18 (2017) S9-S17. [CrossRef]
- M. Bareiss, J. Scanlon, R. Sherony, H.C. Gabler, Crash and injury prevention estimates for intersection driver assistance systems in left turn across path/opposite direction crashes in the United States, Traffic Inj Prev 20 (2019) S133-S138. [CrossRef]
- U. Sander, Opportunities and limitations for intersection collision intervention-A study of real world 'left turn across path' accidents, Accident Analysis & Prevention 99 (2017) 342–355. [CrossRef]
- U. Sander, N. Lubbe, Market penetration of intersection AEB: Characterizing avoided and residual straight crossing path accidents, Accident Analysis & Prevention 115 (2018) 178–188. [CrossRef]
- C. Zauner, E. Tomasch, W. Sinz, C. Ellersdorfer, H. Steffan, Assessment of the effectiveness of Intersection Assistance Systems at urban and rural accident sites, in: ESAR (Ed.), 6th International Conference on ESAR "Expert Symposium on Accident Research", 2014.
- J.B. Cicchino, Effectiveness of forward collision warning and autonomous emergency braking systems in reducing front-to-rear crash rates, Accident Analysis & Prevention 99 (2017) 142–152. [CrossRef]
- Y. Kim, S. Tak, J. Kim, H. Yeo, Identifying major accident scenarios in intersection and evaluation of collision warning system, in: I.I.T.S. Conference (Ed.), IEEE ITSC 2017: 20th International Conference on Intelligent Transportation Systems Mielparque Yokohama in Yokohama, Kanagawa, Japan, October 16-19, 2017, IEEE, Piscataway, NJ, 2017, pp. 1–6. [CrossRef]
- R. Spicer, A. Vahabaghaie, G. Bahouth, L. Drees, R. Martinez von Bülow, P. Baur, Field effectiveness evaluation of advanced driver assistance systems, Traffic Inj Prev 19 (2018) S91-S95. [CrossRef]
- H. Liers, T. Ungar, Prediction of the expected accident scenario of future Level 2 and Level 3 cars on German motorways, in: International Research Council on the Biomechanics of Injury (Ed.), 2019 IRCOBI Conference Proceedings, IRCOBI, 2019.
- HLDI, Predicted availability of safety features on registered vehicles — a 2023 update, 40th ed., Arlington, VA, 2023.
- PARTS, Market Penetration of Advanced Driver Assistance Systems (ADAS), 2024.
- R. Schram, Williams Aled, M. van Ratingen, Ryrber, EURO NCAP’S FIRST STEP TO ASSESS AUTONOMOUS EMERGENCY BRAKING (AEB) FOR VULNERABLE ROAD USERS, in: National Highway Traffic Safety Administration (NHTSA) (Ed.), The 24th ESV Conference Proceedings, NHTSA, 2015.
- Euro NCAP, Assessment Protocol - Safety Assist Collision Avoidance, 2024.
- European Parliament And Council, Regulation (EU) 2019/2144 of the European Parliament and of the Council of 27 November 2019 on type-approval requirements for motor vehicles and their trailers, and systems, components and separate technical units intended for such vehicles, as regards their general safety and the protection of vehicle occupants and vulnerable road users: Regulation (EU) 2019/2144, 2019.
- J. Scholliers, M. Tarkiainen, A. Silla, M. Modijefsky, R. Janse, G. van den Born, Study on the feasibility, costs and benefits of retrofitting advanced driver assistance to improve road safety - Final report, Brussels, Belgium, 2020.
- E. Tomasch, S. Smit, Naturalistic driving study on the impact of an aftermarket blind spot monitoring system on the driver’s behaviour of heavy goods vehicles and buses on reducing conflicts with pedestrians and cyclists, Accident Analysis & Prevention 192 (2023) 107242. [CrossRef]
- S.F. Douglass(U.S. Patent No. 1,519,980), 1924.
- O.S. Pirkey(U.S. Patent No. 1,553,959), 1925.
- B.B. Radclyffe, R.P. Fraser(Patent No. GB 493,510A), 1938.
- D.V. Post, R.G. Mortimer, Subjective evaluation of the front-mounted braking signal, University of Michigan, Highway Safety Research Institute, Ann Arbor, Mich., 1971.
- T. Petzoldt, K. Schleinitz, R. Banse, Laboruntersuchung zur potenziellen Sicherheitswirkung einer vorderen Bremsleuchte in Pkw, ZVS - Zeitschrift für Verkehrssicherheit (2017) 19–24.
- T. Petzoldt, K. Schleinitz, R. Banse, Potential safety effects of a frontal brake light for motor vehicles, IET Intelligent Trans Sys 12 (2018) 449–453. [CrossRef]
- D. Eisele, T. Petzoldt, Effects of a frontal brake light on pedestrians’ willingness to cross the street, Transportation Research Interdisciplinary Perspectives 23 (2024) 100990. [CrossRef]
- L.-F. Bluhm, D. Eisele, W. Schubert, R. Banse, Effects of a frontal brake light on (automated) vehicles on children’s willingness to cross the road, Transportation Research Part F: Traffic Psychology and Behaviour 98 (2023) 269–279. [CrossRef]
- M. Monzel, K. Keidel, W. Schubert, R. Banse, Feldstudie zur Erprobung einer Vorderen Bremsleuchte am Flughafen Berlin-Tegel, Zeitschrift für Verkehrssicherheit 64 (2018).
- M. Poliak, J. Frnda, K. Čulík, B. Kirschbaum, Impact of Front Brake Lights from a Pedestrian Perspective, Vehicles 7 (2025) 25. [CrossRef]
- Psychological, safety and environmental impact of the Front Braking Light, AMS 29 (2024) 978–989.
- E. Tomasch, H. Steffan, M. Darok, Retrospective accident investigation using information from court, in: TRA (Ed.), Transport Research Arena 2008 (TRA), 2008.
- J. Bärgman, V. Lisovskaja, T. Victor, C. Flannagan, M. Dozza, How does glance behavior influence crash and injury risk? A ‘what-if’ counterfactual simulation using crashes and near-crashes from SHRP2, Transportation Research Part F: Traffic Psychology and Behaviour 35 (2015) 152–169. [CrossRef]
- K.-F. Wu, M.N. Ardiansyah, W.-J. Ye, An evaluation scheme for assessing the effectiveness of intersection movement assist (IMA) on improving traffic safety, Traffic Inj Prev 19 (2018) 179–183. [CrossRef]
- R. Shichrur, N.Z. Ratzon, A. Shoham, A. Borowsky, The Effects of an In-vehicle Collision Warning System on Older Drivers' On-road Head Movements at Intersections, Frontiers in psychology 12 (2021) 596278. [CrossRef]
- H. Chen, L. Cao, D.B. Logan, Investigation into the effect of an intersection crash warning system on driving performance in a simulator, Traffic Inj Prev 12 (2011) 529–537. [CrossRef]
- T. Hermitte, C. Thomas, Y. Page, T. Perron, Real-world car accident reconstruction methods for crash avoidance system research, in: SAE (Ed.), SAE Technical Paper Series, SAE International 400 Commonwealth Drive, Warrendale, PA, United States, 2000.
- F. Orsini, G. Gecchele, R. Rossi, M. Gastaldi, A conflict-based approach for real-time road safety analysis: Comparative evaluation with crash-based models, Accident; analysis and prevention 161 (2021) 106382. [CrossRef]
- H. Steffan, PC-CRASH, A Simulation Program for Car Accidents, in: 26th International Symposium on Automotive Technology and Automation, 1993.
- W.E. Cliff, D.T. Montgomery, Validation of PC-Crash - A Momentum-Based Accident Reconstruction Program, in: SAE Technical Papers, 1996.
- A. Moser, H. Hoschopf, H. Steffan, G. Kasanicky, Validation of the PC-Crash Pedestrian Model, in: SAE (Ed.), SAE Technical Paper Series, SAE International 400 Commonwealth Drive, Warrendale, PA, United States, 2000.
- H. Steffan, A. Moser, The Collision and Trajectory Models of PC-CRASH, in: International Congress & Exposition, SAE International, 1996.
- N.A. Rose, N. Carter, An Analytical Review and Extension of Two Decades of Research Related to PC-Crash Simulation Software, in: SAE Technical Paper Series, SAE International400 Commonwealth Drive, Warrendale, PA, United States, 2018.
- H. Steffan, Accident reconstruction methods, Vehicle system dynamics 47 (2009) 1049–1073.
- H. Burg, A. Moser, Handbuch Verkehrsunfallrekonstruktion: Unfallaufnahme, Fahrdynamik, Simulation, 3rd ed., 2017.
- H. Johannsen, Unfallmechanik und Unfallrekonstruktion: Grundlagen der Unfallaufklärung, 3rd ed., Springer Vieweg, Wiesbaden, 2013.
- J. Wille, M. Zatloukal, rateEFFECT - Effectiveness evaluation of active safety systems, in: ESAR (Ed.), 5th International Conference on ESAR "Expert Symposium on Accident Research", 2012, pp. 1–41.
- A. Eichberger, R. Rohm, W. Hirschberg, E. Tomasch, H. Steffan, RCS-TUG Study: Benefit Potential Investigation of Traffic Safety Systems with Respect to Different Vehicle Categories, in: Proceedings of the 22th International Conference on the Enhanced Safety of Vehicles (ESV), 2011, pp. 1–13.
- J. Augenstein, E. Perdeck, J. Stratton, K. Digges, G. Bahouth, Characteristics of Crashes that Increase the Risk of Serious Injuries, Annual Proceedings / Association for the Advancement of Automotive Medicine 47 (2003) 561–576.
- M. Burckhardt, Reaktionszeiten bei Notbremsvorgängen, Verlag TÜV Rheinland, Köln, 1985.
- P.L. Olson, D.E. Cleveland, P.S. Fancher, L.W. Schneider, Parameters affecting stopping sight distance, Washington, D.C., 1984.
- H. Bäumler, Reaktionszeiten im Straßenverkehr, Verkehrsunfall und Fahrzeugtechnik (2007) 300–307.
- H. Bäumler, Reaktionszeiten im Straßenverkehr, Verkehrsunfall und Fahrzeugtechnik (2007) 334–340.
- H. Bäumler, Reaktionszeiten im Straßenverkehr, Verkehrsunfall und Fahrzeugtechnik (2008) 22–27.
- H. Bäumler, Reaktionszeiten im Straßenverkehr, Sachverständige (2009) 78–83.
- H. Derichs, Vergleich statistischer Auswerteverfahren der experimentell ermittelten Reaktionszeiten von PKW-Fahrern im Straßenverkehr. Diplomarbeit, Köln, 1998.
- Winninghoff, M., Schmedding, K., K.H. Schimmelpfennig, Die Reaktionszeitverlängerung bei Dunkelheit unter Alkohol- und Blendungseinflüssen- Ergebnisse aus Laborversuchen, Verkehrsunfall und Fahrzeugtechnik 39 (2001) 126–131.
- H. Zoeller, W. Hugemann, Zur Problematik der Bremsreaktionszeit im Strassenverkehr, 1999.
- M. Green, “How Long Does It Take to Stop?” - Methodological Analysis of Driver Perception-Brake Times, Transportation Human Factors 2 (2000) 195–216. [CrossRef]
- S. Kaufman, L. Buttenwieser, The State of Scooter Sharing in United States Cities. wagner.nyu.edu/files/faculty/publications/Rudin_ScooterShare_Aug2018_0.pdf.
- C. Hydén, The development of a method for traffic safety evaluation: The Swedish traffic conflicts technique. @Lund, Univ., Diss. 1987, Inst. of Technology Dep. of Traffic Planning and Engineering, Lund, 1987.
- European Commission, Annual statistical report on road safety in the EU, 2024, Brussels, 2024.
- European Commission, Facts and Figures Junctions, Brussels, 2024.
- Simon M., T. Hermitte, Y. Page, Intersection road accident causation: A European view, in: National Highway Traffic Safety Administration (NHTSA) (Ed.), The 21st ESV Conference Proceedings, NHTSA, 2009.
- Statistik Austria, Unfalldatenmanagement (UDM). www.statistik.at.
Figure 2.
FBL at the front of the car.

Figure 4.
Relative angle between the non-priority (1) and priority (2) car at the time of the reaction request.
Figure 4.
Relative angle between the non-priority (1) and priority (2) car at the time of the reaction request.
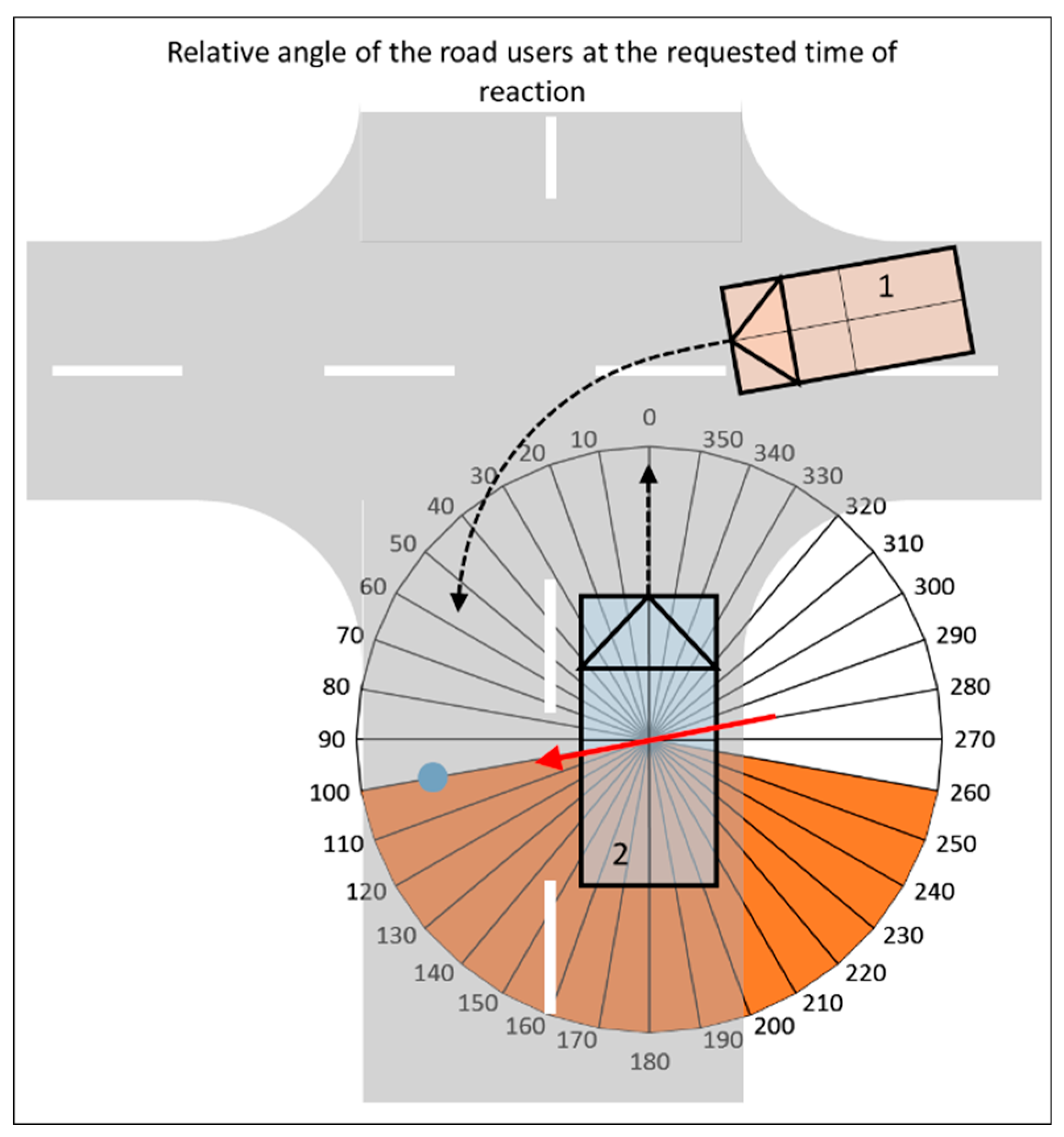
Figure 5.
Visibility of the FBL at different relative angles between the priority and non-priority car.
Figure 5.
Visibility of the FBL at different relative angles between the priority and non-priority car.
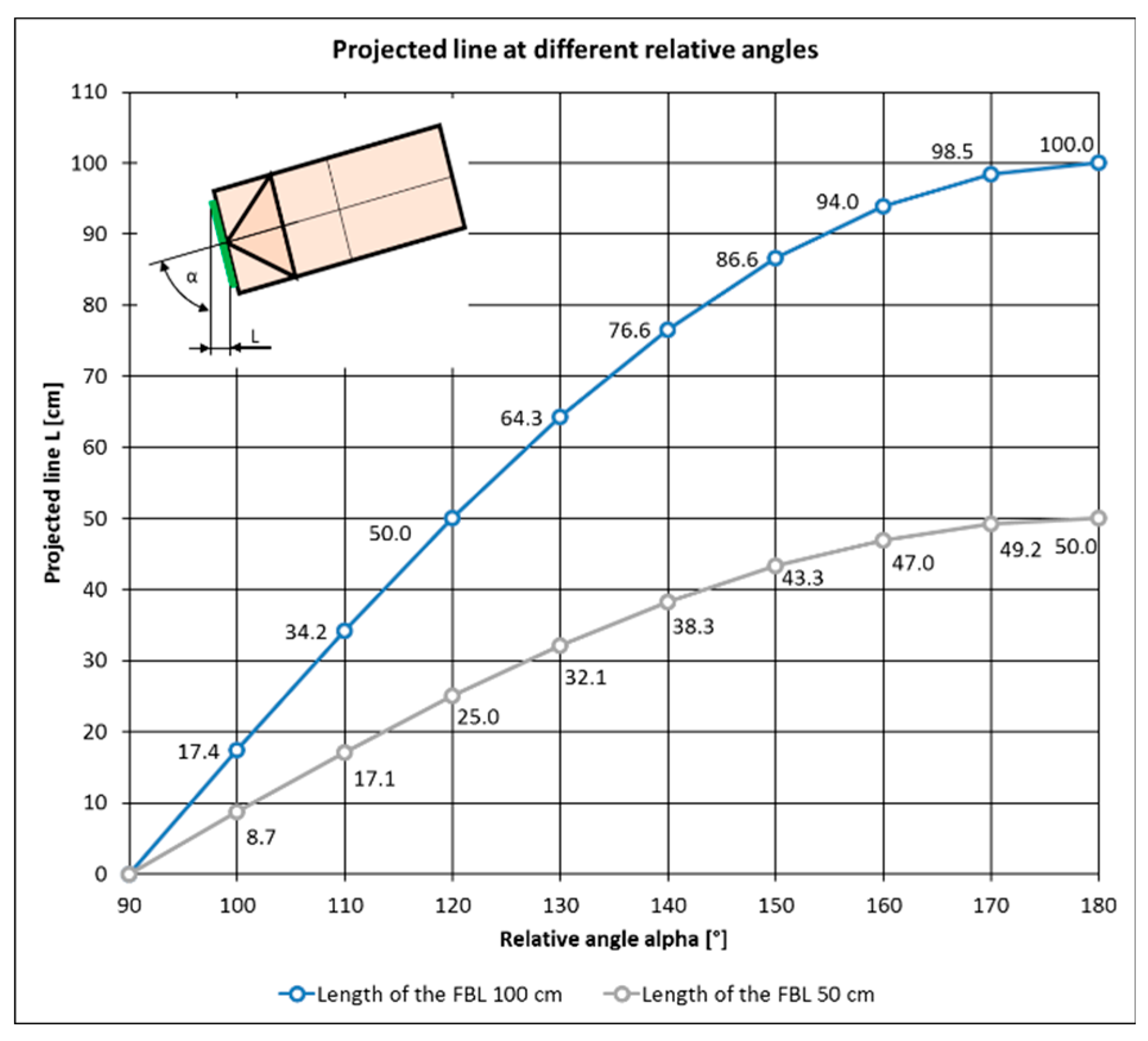
Figure 7.
Relative angle between the non-priority and priority car at the time of the reaction request for the different accident types studied.
Figure 7.
Relative angle between the non-priority and priority car at the time of the reaction request for the different accident types studied.
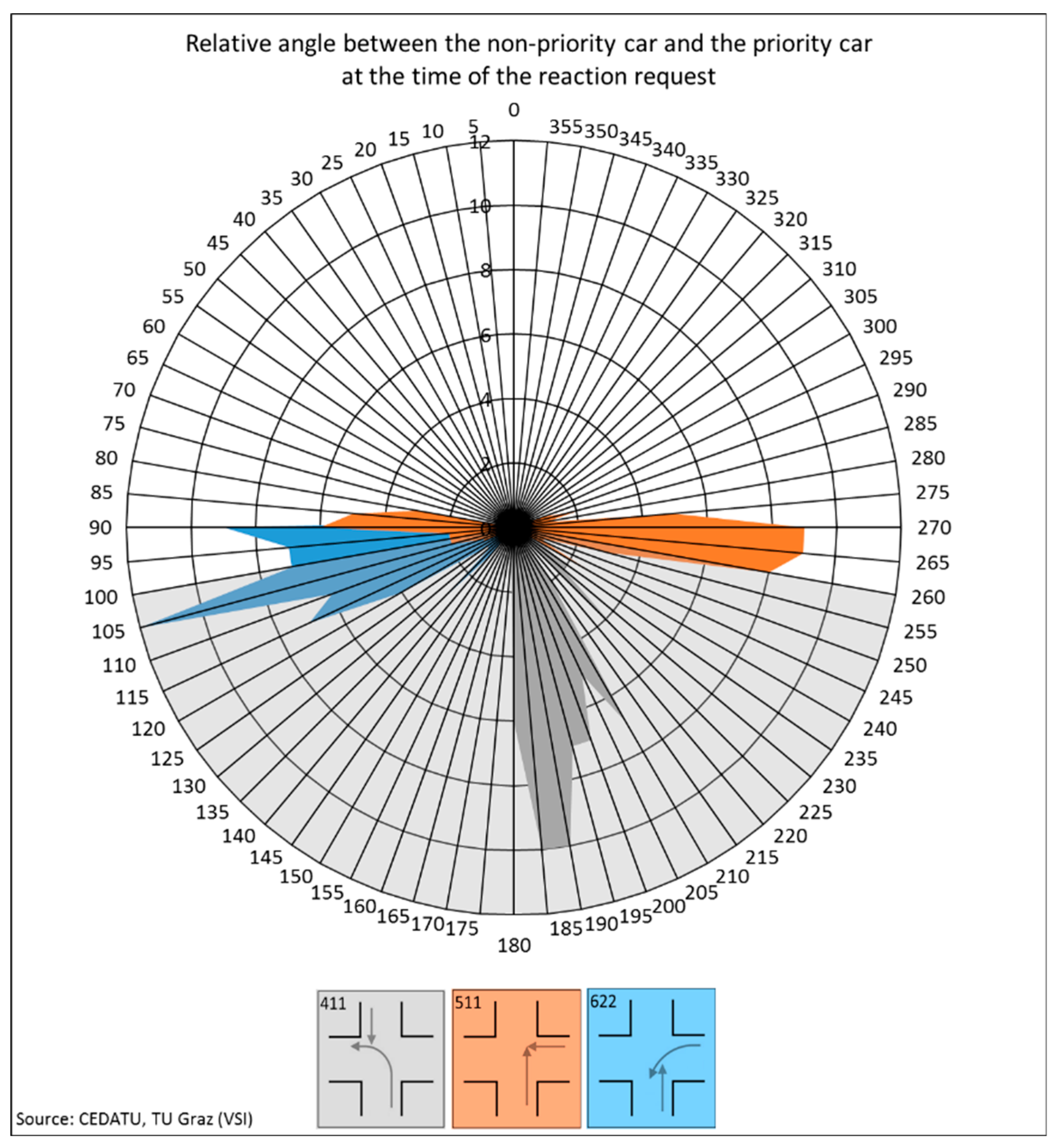
Table 1.
Accidents involving two passenger cars of the analysed sample.
| Minor injury | Severe injury | Fatal injury | Total | |||||
| Urban | Rural | Urban | Rural | Urban | Rural | Urban | Rural | |
| 411 (LTAP/OD) | 27 | 13 | 10 | 9 | 3 | 7 | 40 | 29 |
| 511 (SCP) | 35 | 2 | 11 | 9 | 1 | 10 | 47 | 21 |
| 622 (LTAP/LD) | 20 | 13 | 3 | 14 | 2 | 11 | 25 | 38 |
| Total | 82 | 28 | 24 | 32 | 6 | 28 | 112 | 88 |
Table 2.
Pre-collision behaviour of the non-priority car in the baseline.
| LTAP/OD | SCP | LTAP/LD | Total | |
| Braking | 30 | 12 | 12 | 54 |
| Acceleration | 15 | 18 | 35 | 68 |
| Constant speed | 24 | 38 | 16 | 78 |
| Total | 69 | 68 | 63 | 200 |
Table 3.
Number of potentially preventable and influenceable accidents due to an FBL at different accident sites.
Table 3.
Number of potentially preventable and influenceable accidents due to an FBL at different accident sites.
| Accident site | Safety performance | Reaction time 0.5s | Reaction time 1.0s | Reaction time 1.5s |
| Urban | Baseline | 112 | 112 | 112 |
| FBL visible | 67 | 67 | 67 | |
| Preventable | 28 | 20 | 12 | |
| Influenceable | 43 | 21 | 13 | |
| No effect | 41 | 71 | 87 | |
| Rural | Baseline | 88 | 88 | 88 |
| FBL visible | 63 | 63 | 63 | |
| Preventable | 23 | 15 | 10 | |
| Influenceable | 33 | 23 | 15 | |
| No effect | 32 | 50 | 63 |
Table 4.
Number of potentially preventable and influenceable accidents due to an FBL in different road conditions.
Table 4.
Number of potentially preventable and influenceable accidents due to an FBL in different road conditions.
| Accident site | Safety performance | Reaction time 0.5s | Reaction time 1.0s | Reaction time 1.5s |
| Dry road | Baseline | 148 | 148 | 148 |
| FBL visible | 97 | 97 | 97 | |
| Preventable | 41 | 29 | 19 | |
| Influenceable | 52 | 30 | 20 | |
| No effect | 55 | 89 | 109 | |
| Adverse road (wet, snow/snow slush) | Baseline | 52 | 52 | 52 |
| FBL visible | 33 | 33 | 33 | |
| Preventable | 10 | 6 | 3 | |
| Influenceable | 24 | 14 | 8 | |
| No effect | 18 | 32 | 41 |
Table 5.
Number of potentially preventable and influenceable accidents due to an FBL in different light conditions.
Table 5.
Number of potentially preventable and influenceable accidents due to an FBL in different light conditions.
| Accident site | Safety performance | Reaction time 0.5s | Reaction time 1.0s | Reaction time 1.5s |
| Daylight | Baseline | 143 | 143 | 143 |
| FBL visible | 94 | 94 | 94 | |
| Preventable | 35 | 26 | 15 | |
| Influenceable | 54 | 30 | 20 | |
| No effect | 54 | 87 | 108 | |
| Darkness, Twilight/Dawn | Baseline | 35 | 35 | 35 |
| FBL visible | 26 | 26 | 26 | |
| Preventable | 9 | 5 | 4 | |
| Influenceable | 15 | 9 | 5 | |
| No effect | 11 | 21 | 26 | |
| Artificial light | Baseline | 22 | 22 | 22 |
| FBL visible | 10 | 10 | 10 | |
| Preventable | 7 | 4 | 3 | |
| Influenceable | 7 | 5 | 3 | |
| No effect | 8 | 13 | 16 |
Table 6.
Collision speed of the priority car in the baseline and treatment, including standard deviation.
Table 6.
Collision speed of the priority car in the baseline and treatment, including standard deviation.
| Injury severity | Cases | Baseline | Reaction time 0.5s | Reaction time 1.0s | Reaction time 1.5s | |
| Minor | All | 110 | 44.8 (15.9) | 28.8 (23.4) | 36.3 (23.5) | 41.6 (22.2) |
| FBL visible | 72 | 46.4 (16.6) | 27.7 (24.3) | 36.3 (24.7) | 42.6 (23.5) | |
| Severe | All | 56 | 56.2 (24.3) | 36.9 (30.1) | 45.2 (31.3) | 49.2 (33.5) |
| FBL visible | 35 | 60.0 (25.9) | 41.3 (32.3) | 50.1 (32.8) | 54.1 (35.6) | |
| Fatal | All | 34 | 70.9 (20.5) | 51.2 (31.9) | 59.9 (32.0) | 69.6 (23.6) |
| FBL visible | 23 | 69.7 (21.0) | 54.3 (31.4) | 62.4 (33.3) | 72.4 (24.4) | |
Table 7.
Change of velocity (delta-v) due to an FBL, including standard deviation.
| Injury severity | Cases | Car | Baseline | Reaction time 0.5s | Reaction time 1.0s | Reaction time 1.5s |
| Minor | 72 | priority | 20.2 (10.2) | 12.3 (12.2) | 15.6 (12.5) | 18.1 (12.8) |
| non-priority | 20.6 (10.4) | 12.5 (12.6) | 15.8 (13.1) | 18.1 (13.2) | ||
| Severe | 35 | priority | 29.7 (12.7) | 18.9 (16.4) | 22.5 (17.0) | 22.6 (16.6) |
| non-priority | 31.0 (15.0) | 20.5 (18.6) | 24.8 (19.6) | 24.8 (19.6) | ||
| Fatal | 23 | priority | 35.4 (14.6) | 26.8 (18.1) | 32.4 (20.9) | 37.3 (18.5) |
| non-priority | 44.4 (19.1) | 34.3 (23.2) | 40.3 (24.6) | 45.4 (20.4) | ||
| Total | 130 | priority | 25.5 (13.2) | 16.6 (15.4) | 20.4 (16.6) | 22.7 (16.5) |
| non-priority | 27.6 (16.2) | 18.5 (18.3) | 22.5 (19.6) | 24.7 (19.1) |
Table 8.
Extrapolation of the safety performance results to Austrian data.
| Accident type | Injury severity | Safety performance | Reaction time 0.5s | Reaction time 1.0s | Reaction time 1.5s |
| LTAP/OD | Minor injury | Preventable | 95 | 41 | 41 |
| Influenceable | 244 | 109 | 55 | ||
| Severe injury | Preventable | 15 | 11 | 11 | |
| Influenceable | 19 | 11 | 0 | ||
| Fatal injury | Preventable | 0 | 0 | 0 | |
| Influenceable | 1 | 1 | 0 | ||
| SCP | Minor injury | Preventable | 64 | 64 | 0 |
| Influenceable | 96 | 32 | 96 | ||
| Severe injury | Preventable | 6 | 0 | 0 | |
| Influenceable | 11 | 6 | 0 | ||
| Fatal injury | Preventable | 0 | 0 | 0 | |
| Influenceable | 0 | 0 | 0 | ||
| LTAP/LD | Minor injury | Preventable | 173 | 107 | 80 |
| Influenceable | 80 | 120 | 80 | ||
| Severe injury | Preventable | 10 | 10 | 10 | |
| Influenceable | 16 | 10 | 4 | ||
| Fatal injury | Preventable | 1 | 1 | 0 | |
| Influenceable | 1 | 1 | 1 | ||
| Total | Minor injury | Preventable | 332 | 212 | 121 |
| Influenceable | 420 | 261 | 231 | ||
| Severe injury | Preventable | 31 | 21 | 21 | |
| Influenceable | 46 | 27 | 4 | ||
| Fatal injury | Preventable | 1 | 1 | 0 | |
| Influenceable | 2 | 2 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



