Submitted:
25 February 2025
Posted:
26 February 2025
You are already at the latest version
Abstract
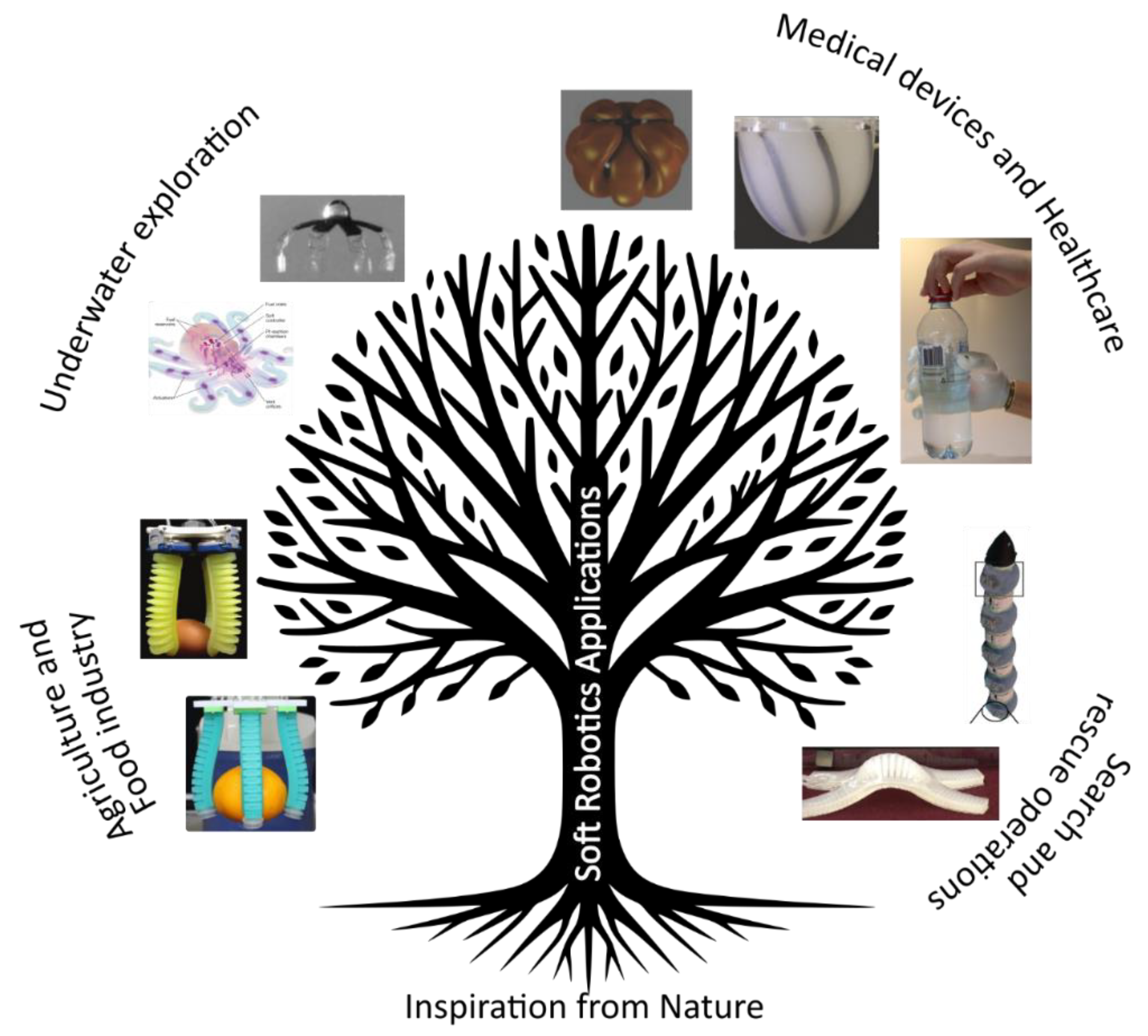
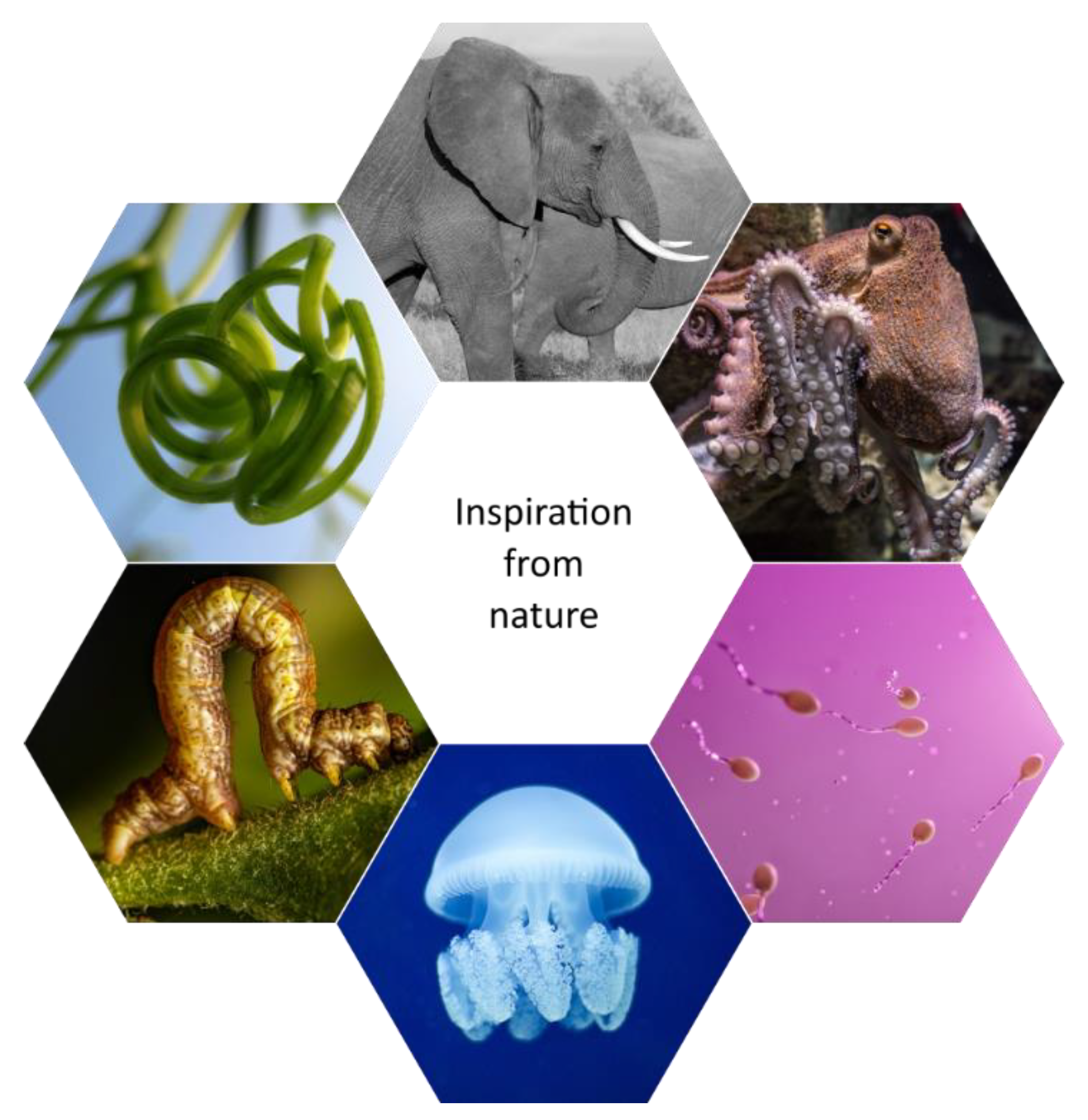
This article explores the transformative advances in soft machines, where biology, materials science, and engineering have converged. We discuss the remarkable adaptability and versatility of soft machines, drawing inspiration from nature's elegant solutions. From the intricate movements of octopus tentacles to the resilience of an elephant trunk, nature provides a wealth of inspiration for designing robots capable of navigating complex environments with grace and efficiency. Central to this advancement is the ongoing research in bioinspired materials, which serve as the building blocks for creating soft machines with lifelike behaviors and adaptive capabilities. By fostering collaboration and innovation, we can unlock new possibilities in soft machines, shaping a future where robots seamlessly integrate into and interact with the natural world, offering solutions to humanity's most pressing challenges.
Keywords:
1. Introduction to Bioinspired Soft Machines
2. Understanding Biological Inspiration
3. Materials Selection in Soft Machines
4. Actuation Mechanisms in Bioinspired Soft Machines
5. Mechanical Design for Adaptive Functionality
- Design Inspiration: Bioinspired designs to achieve lifelike movements. By mimicking nature's mechanics, soft machines can adapt to their environment and manipulate objects effectively [23]. For example, bioinspired Fluid-Filled Soft Linear Actuator: A novel fluidic actuator inspired by marine worms has been developed, combining pneumatic and hydraulic principles to create a unique fluidic transmission mechanism. This innovative design aims to enhance soft machines with increased stretch ability and output forces [71]. Soft grippers, inspired by the dexterity of octopus tentacles and human hands, employ flexible and compliant structures to grasp objects of varying shapes and sizes with precision and versatility [72]. These grippers leverage principles such as differential stiffness and under-actuation to achieve robust and adaptive grasping capabilities, enabling applications in fields such as manufacturing, healthcare, and exploration [73]. Similarly, locomotion mechanisms in soft machines draw inspiration from the diverse modes of movement observed in nature, ranging from crawling and slithering to swimming and flying [74]. Bioinspired designs such as soft robotic worms and snake-like robots utilize segmented and undulating bodies to navigate complex terrains and confined spaces, mirroring the locomotive strategies of their biological counterparts [75].
- Materials for Soft machines: The integration of bioinspired materials and approaches in soft machines enables robots to acquire life-like abilities, self-repair, self-feed, adapt, and biodegrade. For example, the structure of plant tendrils, which can curl and wrap around objects to support climbing, inspires the design of flexible gripping mechanisms in soft machines [68]. Advances in materials science play a crucial role in pushing the boundaries of biomimetic robotics [3]. Understanding the mechanical properties of natural materials guides the successful development of soft robotic systems [76].
- Biology to autonomous Soft machines: Research explores the bioinspired aspects of soft machines, focusing on actuation, sensing, and system integration. The trend is towards closed-loop systems and embodiment to achieve autonomous soft machines [6].
6. Embodied Intelligence in Bioinspired Soft Machines
7. Applications and Future Directions of Bioinspired Soft Machines
7.1. Current Applications
7.2. Future Directions and Advancements
8. Ethical Considerations and Societal Impacts
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ER | Electrorheological |
| MR | Magnetirheological |
| SMA | Shape Memory Alloy |
| IPMC | Ionic Polymer-metal composite |
| DEA | Dielectric Elastomer |
| AI | Artificial Intelligence |
| ML | Machine Learning |
| QSAR | Quantitative Structure-Activity Relationship |
| NAM | New Approach Methodology |
References
- Cianchetti, M.; Laschi, C.; Menciassi, A.; Dario, P. Biomedical applications of soft robotics. Nature Reviews Materials 2018, 3, 143-153. [CrossRef]
- Gariya, N.; Kumar, P. A review on soft materials utilized for the manufacturing of soft robots. Materials Today: Proceedings 2021, 46, 11177-11181. [CrossRef]
- Laschi, C.; Mazzolai, B. Bioinspired materials and approaches for soft robotics. MRS Bulletin 2021, 46, 345-349. [CrossRef]
- Feinberg, A.W. Biological Soft Robotics. Annual Review of Biomedical Engineering 2015, 17, 243-265. [CrossRef]
- Consumi, V.; Lindenroth, L.; Merlin, J.; Stoyanov, D.; Stilli, A. Design and Evaluation of the SoftSCREEN Capsule for Colonoscopy. IEEE Robotics and Automation Letters 2023, 8, 1659-1666. [CrossRef]
- Ren, L.; Li, B.; Wei, G.; Wang, K.; Song, Z.; Wei, Y.; Ren, L.; Liu, Q. Biology and bioinspiration of soft robotics: Actuation, sensing, and system integration. iScience 2021, 24, 103075. [CrossRef]
- Alici, G. Robotics—Soft Robotics. In Encyclopedia of Biomedical Engineering, Narayan, R., Ed.; Elsevier: Oxford, 2019; pp. 652-659.
- Roh, Y.; Lee, Y.; Lim, D.; Gong, D.; Hwang, S.; Kang, M.; Kim, D.; Cho, J.; Kwon, G.; Kang, D.; et al. Nature's Blueprint in Bioinspired Materials for Robotics. Advanced Functional Materials n/a, 2306079. [CrossRef]
- Ye, T.; Wang, Y.; Xu, S.; Wang, Y.; Li, J. Modeling and motion control of an octopus-like flexible manipulator actuated by shape memory alloy wires. Journal of Intelligent Material Systems and Structures 2021, 33, 3-16. [CrossRef]
- Calisti, M.; Giorelli, M.; Levy, G.; Mazzolai, B.; Hochner, B.; Laschi, C.; Dario, P. An octopus-bioinspired solution to movement and manipulation for soft robots. Bioinspiration & biomimetics 2011, 6, 036002.
- Kumar, S.R.S. How elephant's flexible trunk can improve robots. Hindustan Times 25/07/2022 2022.
- Tang, C. Soft robotic gripper modeled after an elephant’s trunk. 2020.
- Leanza, S.; Lu-Yang, J.; Kaczmarski, B.; Wu, S.; Kuhl, E.; Zhao, R.R. Elephant Trunk Inspired Multimodal Deformations and Movements of Soft Robotic Arms. Advanced Functional Materials 2024, 2400396.
- Ashuri, T.; Armani, A.; Jalilzadeh Hamidi, R.; Reasnor, T.; Ahmadi, S.; Iqbal, K. Biomedical soft robots: Current status and perspective. Biomed Eng Lett 2020, 10, 369-385. [CrossRef]
- Banerjee, H.; Tse, Z. Soft robotics with compliance and adaptation for biomedical applications and forthcoming challenges. International Journal of Robotics and Automation 2018, 33. [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467-475. [CrossRef]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Science Robotics 2016, 1, eaah3690. [CrossRef]
- Truby, R.L. Designing Soft Robots as Robotic Materials. Accounts of Materials Research 2021, 2, 854-857. [CrossRef]
- Hegde, C.; Su, J.; Tan, J.M.R.; He, K.; Chen, X.; Magdassi, S. Sensing in Soft Robotics. ACS Nano 2023, 17, 15277-15307. [CrossRef]
- Ang, B.W.K.; Yeow, C.-H.; Lim, J.H. A Critical Review on Factors Affecting the User Adoption of Wearable and Soft Robotics. Sensors 2023, 23, 3263.
- Wang, Y.; Gregory, C.; Minor, M.A. Improving Mechanical Properties of Molded Silicone Rubber for Soft Robotics Through Fabric Compositing. Soft Robotics 2018, 5, 272-290. [CrossRef]
- Marchese, A.D.; Katzschmann, R.K.; Rus, D. A Recipe for Soft Fluidic Elastomer Robots. Soft Robot 2015, 2, 7-25. [CrossRef]
- Coyle, S.; Majidi, C.; LeDuc, P.; Hsia, K.J. Bio-inspired soft robotics: Material selection, actuation, and design. Extreme Mechanics Letters 2018, 22, 51-59. [CrossRef]
- Khandan, A.; Jazayeri, H.; Fahmy, M.D.; Razavi, M. Hydrogels: Types, structure, properties, and applications. Biomat Tiss Eng 2017, 4, 143-169.
- Deligkaris, K.; Tadele, T.S.; Olthuis, W.; van den Berg, A. Hydrogel-based devices for biomedical applications. Sensors and Actuators B: Chemical 2010, 147, 765-774. [CrossRef]
- Schönfeld, D.; Chalissery, D.; Wenz, F.; Specht, M.; Eberl, C.; Pretsch, T. Actuating Shape Memory Polymer for Thermoresponsive Soft Robotic Gripper and Programmable Materials. Molecules 2021, 26, 522.
- Boyraz, P.; Runge, G.; Raatz, A. An overview of novel actuators for soft robotics. In Proceedings of the Actuators, 2018; p. 48.
- Bilodeau, R.A.; Kramer, R.K. Self-Healing and Damage Resilience for Soft Robotics: A Review. Frontiers in Robotics and AI 2017, 4. [CrossRef]
- Singh, A.V.; Ansari, M.H.D.; Mahajan, M.; Srivastava, S.; Kashyap, S.; Dwivedi, P.; Pandit, V.; Katha, U. Sperm Cell Driven Microrobots-Emerging Opportunities and Challenges for Biologically Inspired Robotic Design. Micromachines (Basel) 2020, 11. [CrossRef]
- Singh, A.V.; Dad Ansari, M.H.; Dayan, C.B.; Giltinan, J.; Wang, S.; Yu, Y.; Kishore, V.; Laux, P.; Luch, A.; Sitti, M. Multifunctional magnetic hairbot for untethered osteogenesis, ultrasound contrast imaging and drug delivery. Biomaterials 2019, 219, 119394. [CrossRef]
- Li, S.; Bai, H.; Shepherd, R.F.; Zhao, H. Bio-inspired design and additive manufacturing of soft materials, machines, robots, and haptic interfaces. Angewandte Chemie International Edition 2019, 58, 11182-11204.
- Singh, A.V.; Ansari, M.H.D.; Laux, P.; Luch, A. Micro-nanorobots: Important considerations when developing novel drug delivery platforms. Expert Opinion on Drug Delivery 2019, 16, 1259-1275. [CrossRef]
- C., J. Soft Material Characterization for Robotic Applications. SOFT ROBOTICS 2015, Volume 2. [CrossRef]
- Jiang, H.Y.; Kelch, S.; Lendlein, A. Polymers Move in Response to Light. Advanced Materials 2006, 18, 1471-1475. [CrossRef]
- Meng, Q.; Hu, J.; Ho, K.; Ji, F.; Chen, S. The Shape Memory Properties of Biodegradable Chitosan/Poly(l-lactide) Composites. Journal of Polymers and the Environment 2009, 17, 212-224. [CrossRef]
- Zhang, Y.-F.; Zhang, N.; Hingorani, H.; Ding, N.; Wang, D.; Yuan, C.; Zhang, B.; Gu, G.; Ge, Q. Fast-Response, Stiffness-Tunable Soft Actuator by Hybrid Multimaterial 3D Printing. Advanced Functional Materials 2019, 29, 1806698. [CrossRef]
- Yang, J.; Cao, P.; Gao, K.; Ding, C.; Chen, S.; Zhang, X.; Wang, T.; Wang, Q.; Zhang, Y. Thermal Tunable Tribological Behavior of Shape Memory Biphenyl Epoxy Resin. Coatings 2023, 13. [CrossRef]
- Capadona, J.R.; Shanmuganathan, K.; Tyler, D.J.; Rowan, S.J.; Weder, C. Stimuli-Responsive Polymer Nanocomposites Inspired by the Sea Cucumber Dermis. Science 2008, 319, 1370-1374. [CrossRef]
- Trotter, J.A.; Tipper, J.; Lyons-Levy, G.; Chino, K.; Heuer, A.H.; Liu, Z.; Mrksich, M.; Hodneland, C.; Dillmore, W.S.; Koob, T.J.; et al. Towards a fibrous composite with dynamically controlled stiffness: Lessons from echinoderms. Biochemical Society Transactions 2000, 28, 357-362. [CrossRef]
- Rokaya, D.; Skallevold, H.E.; Srimaneepong, V.; Marya, A.; Shah, P.K.; Khurshid, Z.; Zafar, M.S.; Sapkota, J. Shape Memory Polymeric Materials for Biomedical Applications: An Update. Journal of Composites Science 2023, 7. [CrossRef]
- Yasa, O.; Toshimitsu, Y.; Michelis, M.Y.; Jones, L.S.; Filippi, M.; Buchner, T.; Katzschmann, R.K. An overview of soft robotics. Annual Review of Control, Robotics, and Autonomous Systems 2023, 6, 1-29.
- Huang, W.; Xiao, J.; Xu, Z. A variable structure pneumatic soft robot. Scientific Reports 2020, 10, 18778. [CrossRef]
- Su, H.; Hou, X.; Zhang, X.; Qi, W.; Cai, S.; Xiong, X.; Guo, J. Pneumatic Soft Robots: Challenges and Benefits. Actuators 2022, 11, 92.
- Pawar, P.B. Industrial Hydraulics and Pneumatics; Sankalp Publication: 2020.
- Ankit; Ho, T.Y.K.; Nirmal, A.; Kulkarni, M.R.; Accoto, D.; Mathews, N. Soft actuator materials for electrically driven haptic interfaces. Advanced Intelligent Systems 2022, 4, 2100061.
- Higueras-Ruiz, D.R.; Nishikawa, K.; Feigenbaum, H.; Shafer, M. What is an artificial muscle? A comparison of soft actuators to biological muscles. Bioinspiration & biomimetics 2021, 17, 011001.
- Ramdya, P.; Ijspeert, A.J. The neuromechanics of animal locomotion: From biology to robotics and back. Science Robotics 2023, 8, eadg0279.
- Ansari, M.H.D.; Iacovacci, V.; Pane, S.; Ourak, M.; Borghesan, G.; Tamadon, I.; Vander Poorten, E.; Menciassi, A. 3D Printing of Small-Scale Soft Robots with Programmable Magnetization. Advanced Functional Materials 2023, 33, 2211918. [CrossRef]
- El-Atab, N.; Mishra, R.B.; Al-Modaf, F.; Joharji, L.; Alsharif, A.A.; Alamoudi, H.; Diaz, M.; Qaiser, N.; Hussain, M.M. Soft Actuators for Soft Robotic Applications: A Review. Advanced Intelligent Systems 2020, 2, 2000128. [CrossRef]
- Li, M.; Pal, A.; Aghakhani, A.; Pena-Francesch, A.; Sitti, M. Soft actuators for real-world applications. Nat Rev Mater 2022, 7, 235-249. [CrossRef]
- Ansari, M.H.; Ha, X.T.; Ourak, M.; Borghesan, G.; Iacovacci, V.; Vander Poorten, E.; Menciassi, A. Characterization of a 3D Printed Endovascular Magnetic Catheter. Actuators 2023, 12. [CrossRef]
- Lee, J.-H.; Chung, Y.S.; Rodrigue, H. Long Shape Memory Alloy Tendon-based Soft Robotic Actuators and Implementation as a Soft Gripper. Scientific Reports 2019, 9, 11251. [CrossRef]
- Xie, Q.; Wang, T.; Yao, S.; Zhu, Z.; Tan, N.; Zhu, S. Design and modeling of a hydraulic soft actuator with three degrees of freedom. Smart Materials and Structures 2020, 29, 125017. [CrossRef]
- Lalegani Dezaki, M.; Bodaghi, M.; Serjouei, A.; Afazov, S.; Zolfagharian, A. Adaptive reversible composite-based shape memory alloy soft actuators. Sensors and Actuators A: Physical 2022, 345, 113779. [CrossRef]
- Yang, Y.; Pei, Z.; Li, Z.; Wei, Y.; Ji, Y. Making and Remaking Dynamic 3D Structures by Shining Light on Flat Liquid Crystalline Vitrimer Films without a Mold. Journal of the American Chemical Society 2016, 138, 2118-2121. [CrossRef]
- Dong, X.; Xu, J.; Xu, X.; Dai, S.; Zhou, X.; Ma, C.; Cheng, G.; Yuan, N.; Ding, J. Sunlight-Driven Continuous Flapping-Wing Motion. ACS Applied Materials & Interfaces 2020, 12, 6460-6470. [CrossRef]
- Park, S.-J.; Gazzola, M.; Park, K.S.; Park, S.; Di Santo, V.; Blevins, E.L.; Lind, J.U.; Campbell, P.H.; Dauth, S.; Capulli, A.K.; et al. Phototactic guidance of a tissue-engineered soft-robotic ray. Science 2016, 353, 158. [CrossRef]
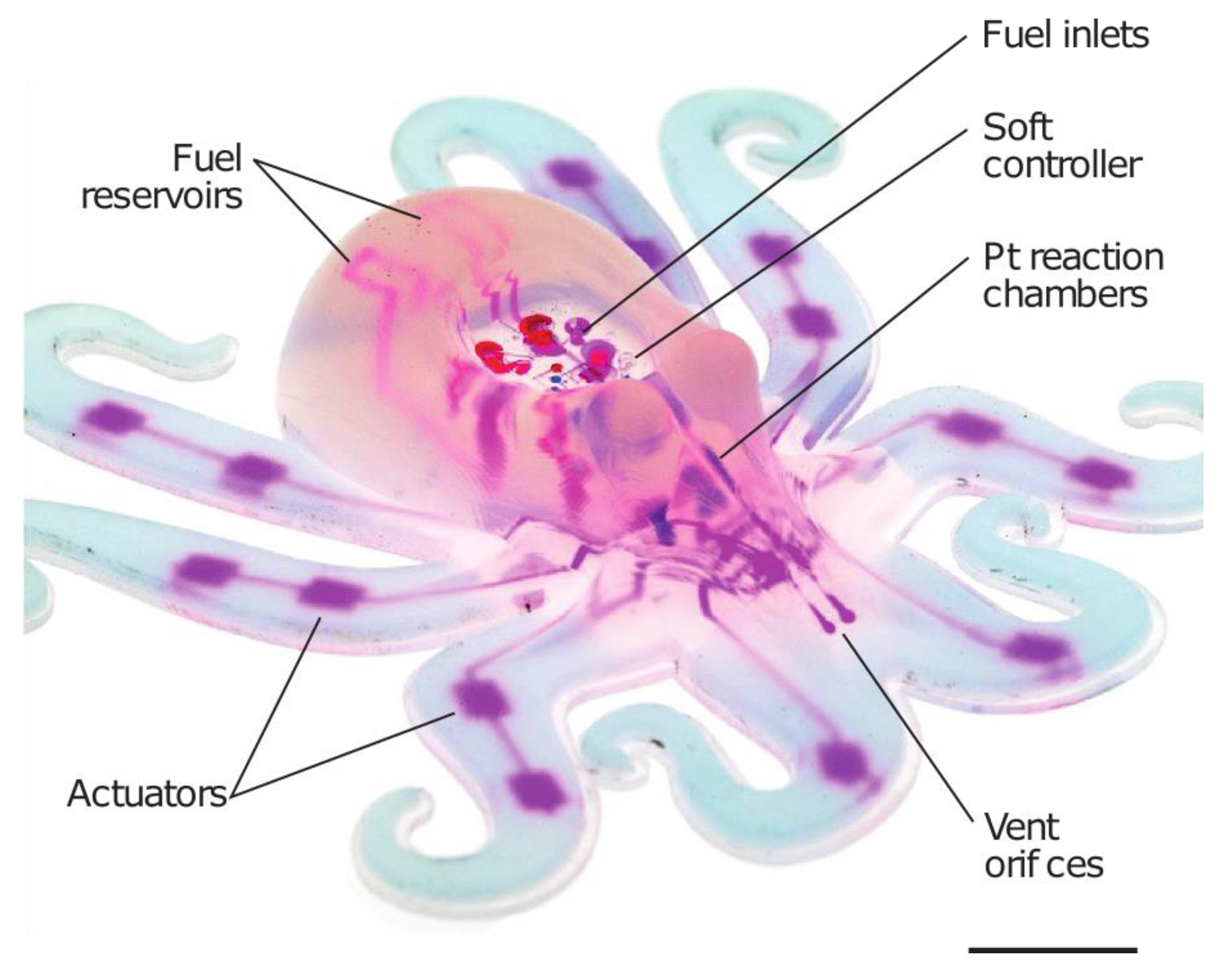
- Fusi, G.; Del Giudice, D.; Skarsetz, O.; Di Stefano, S.; Walther, A. Autonomous Soft Robots Empowered by Chemical Reaction Networks. Advanced Materials 2023, 35, 2209870. [CrossRef]
- Bartlett, N.W.; Tolley, M.T.; Overvelde, J.T.B.; Weaver, J.C.; Mosadegh, B.; Bertoldi, K.; Whitesides, G.M.; Wood, R.J. A 3D-printed, functionally graded soft robot powered by combustion. Science 2015, 349, 161-165. [CrossRef]
- Ren, Z.; Hu, W.; Dong, X.; Sitti, M. Multi-functional soft-bodied jellyfish-like swimming. Nature Communications 2019, 10, 2703. [CrossRef]
- Wang, X.; Qin, X.-H.; Hu, C.; Terzopoulou, A.; Chen, X.-Z.; Huang, T.-Y.; Maniura-Weber, K.; Pané, S.; Nelson, B.J. 3D Printed Enzymatically Biodegradable Soft Helical Microswimmers. Advanced Functional Materials 2018, 28, 1804107. [CrossRef]
- Ji, X.; Liu, X.; Cacucciolo, V.; Imboden, M.; Civet, Y.; El Haitami, A.; Cantin, S.; Perriard, Y.; Shea, H. An autonomous untethered fast soft robotic insect driven by low-voltage dielectric elastomer actuators. Science Robotics 2019, 4, eaaz6451. [CrossRef]
- Wu, Y.; Yim, J.K.; Liang, J.; Shao, Z.; Qi, M.; Zhong, J.; Luo, Z.; Yan, X.; Zhang, M.; Wang, X.; et al. Insect-scale fast moving and ultrarobust soft robot. Science Robotics 2019, 4, eaax1594. [CrossRef]
- Ahmed, F.; Waqas, M.; Jawed, B.; Soomro, A.M.; Kumar, S.; Hina, A.; Khan, U.; Kim, K.H.; Choi, K.H. Decade of bio-inspired soft robots: A review. Smart Materials and Structures 2022, 31, 073002. [CrossRef]
- Roche, E.T.; Wohlfarth, R.; Overvelde, J.T.; Vasilyev, N.V.; Pigula, F.A.; Mooney, D.J.; Bertoldi, K.; Walsh, C.J. A bioinspired soft actuated material. Adv. Mater 2014, 26, 1200-1206.
- Stella, F.; Hughes, J. The science of soft robot design: A review of motivations, methods and enabling technologies. Front Robot AI 2022, 9, 1059026. [CrossRef]
- Fratzl, P.; Jacobs, K.; Möller, M.; Scheibel, T.; Sternberg, K. Inspired by Nature.
- Lee, J.; Calvo, P. Enacting Plant-Inspired Robotics. Front Neurorobot 2021, 15, 772012. [CrossRef]
- Stella, F.; Hughes, J. The science of soft robot design: A review of motivations, methods and enabling technologies. Frontiers in Robotics and AI 2023, 9. [CrossRef]
- Wang, H.; Totaro, M.; Beccai, L. Toward Perceptive Soft Robots: Progress and Challenges. Advanced Science 2018, 5, 1800541. [CrossRef]
- Ang, B.W.; Yeow, C.-H.; Lim, J.H. A Critical Review on Factors Affecting the User Adoption of Wearable and Soft Robotics. Sensors 2023, 23. [CrossRef]
- Manti, M.; Hassan, T.; Passetti, G.; NicolòD’Elia; Laschi, C.; Cianchetti, M. A Bioinspired Soft Robotic Gripper for Adaptable and Effective Grasping. Soft Robotics 2015, 2. [CrossRef]
- Zhou, L.; Ren, L.; Chen, Y.; Niu, S.; Han, Z.; Ren, L. Bio-Inspired Soft Grippers Based on Impactive Gripping. Advanced Science 2021, 8, 2002017. [CrossRef]
- Ijspeert, A.J. Biorobotics: Using robots to emulate and investigate agile locomotion. Science 2014, 346, 196-203. [CrossRef]
- Calisti, M.; Picardi, G.; Laschi, C. Fundamentals of soft robot locomotion. Journal of The Royal Society Interface 2017, 14, 20170101. [CrossRef]
- Roh, Y.; Lee, Y.; Lim, D.; Gong, D.; Hwang, S.; Kang, M.; Kim, D.; Cho, J.; Kwon, G.; Kang, D.; et al. Nature's Blueprint in Bioinspired Materials for Robotics. Advanced Functional Materials 2023, n/a, 2306079. [CrossRef]
- Trivedi, D.; Rahn, C.D.; Kier, W.M.; Walker, I.D. Soft robotics: Biological inspiration, state of the art, and future research. Applied bionics and biomechanics 2008, 5, 99-117.
- Cianchetti, M. Embodied Intelligence in Soft Robotics Through Hardware Multifunctionality. Frontiers in Robotics and AI 2021, 8. [CrossRef]
- Sun, J.; Lerner, E.; Tighe, B.; Middlemist, C.; Zhao, J. Embedded shape morphing for morphologically adaptive robots. Nature Communications 2023, 14, 6023. [CrossRef]
- Laschi, C.; Mazzolai, B. Lessons from animals and plants: The symbiosis of morphological computation and soft robotics. IEEE Robotics & Automation Magazine 2016, 23, 107-114.
- Wehner, M.; Truby, R.L.; Fitzgerald, D.J.; Mosadegh, B.; Whitesides, G.M.; Lewis, J.A.; Wood, R.J. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 2016, 536, 451-455. [CrossRef]
- Cangelosi, A.; Bongard, J.; Fischer, M.H.; Nolfi, S. Embodied intelligence. Springer handbook of computational intelligence 2015, 697-714.
- Floreano, D.; Mondada, F.; Perez-Uribe, A.; Roggen, D. Evolution of embodied intelligence. In Proceedings of the Embodied Artificial Intelligence: International Seminar, Dagstuhl Castle, Germany, July 7-11, 2003. Revised Papers, 2004; pp. 293-311.
- Sitti, M. Physical intelligence as a new paradigm. Extreme Mechanics Letters 2021, 46, 101340. [CrossRef]
- Harvey, K. Embodied Intelligence through Coordination Dynamics in the Brain-Body Complex. International Journal of Basic & Applied Sciences 2019, 3, 37-54.
- Tauber, F.; Desmulliez, M.; Piccin, O.; Stokes, A.A. Perspective for soft robotics: The field’s past and future. Bioinspiration & Biomimetics 2023, 18, 035001. [CrossRef]
- Mengaldo, G.; Renda, F.; Brunton, S.L.; Bächer, M.; Calisti, M.; Duriez, C.; Chirikjian, G.S.; Laschi, C. A concise guide to modelling the physics of embodied intelligence in soft robotics. Nature Reviews Physics 2022, 4, 595-610. [CrossRef]
- Laschi, C. Embodied Intelligence in soft robotics: Joys and sorrows. IOP Conference Series: Materials Science and Engineering 2022, 1261, 012002. [CrossRef]
- Lara, B.; Astorga, D.; Mendoza-Bock, E.; Pardo, M.; Escobar, E.; Ciria, A. Embodied Cognitive Robotics and the learning of sensorimotor schemes. Adaptive Behavior 2018, 26, 225-238. [CrossRef]
- Polykretis, I.; Supic, L.; Danielescu, A. Bioinspired smooth neuromorphic control for robotic arms. Neuromorphic Computing and Engineering 2023, 3, 014013. [CrossRef]
- Hartmann, F.; Baumgartner, M.; Kaltenbrunner, M. Becoming Sustainable, The New Frontier in Soft Robotics. Advanced Materials 2021, 33, 2004413. [CrossRef]
- Wang, Z.; Or, K.; Hirai, S. A dual-mode soft gripper for food packaging. Robotics and Autonomous Systems 2020, 125, 103427. [CrossRef]
- Hao, Y.; Gong, Z.; Xie, Z.; Guan, S.; Yang, X.; Wang, T.; Wen, L. A Soft Bionic Gripper with Variable Effective Length. Journal of Bionic Engineering 2018, 15, 220-235. [CrossRef]
- Fusco, S.; Sakar, M.S.; Kennedy, S.; Peters, C.; Bottani, R.; Starsich, F.; Mao, A.; Sotiriou, G.A.; Pané, S.; Pratsinis, S.E.; et al. An Integrated Microrobotic Platform for On-Demand, Targeted Therapeutic Interventions. Advanced Materials 2014, 26, 952-957. [CrossRef]
- Roche, E.T.; Wohlfarth, R.; Overvelde, J.T.B.; Vasilyev, N.V.; Pigula, F.A.; Mooney, D.J.; Bertoldi, K.; Walsh, C.J. A Bioinspired Soft Actuated Material. Advanced Materials 2014, 26, 1200-1206. [CrossRef]
- Mohammadi, A.; Lavranos, J.; Zhou, H.; Mutlu, R.; Alici, G.; Tan, Y.; Choong, P.; Oetomo, D. A practical 3D-printed soft robotic prosthetic hand with multi-articulating capabilities. PLoS ONE 2020, 15, e0232766.
- Das, R.; Babu, S.P.M.; Visentin, F.; Palagi, S.; Mazzolai, B. An earthworm-like modular soft robot for locomotion in multi-terrain environments. Scientific Reports 2023, 13, 1571. [CrossRef]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proceedings of the National Academy of Sciences 2011, 108, 20400-20403. [CrossRef]
- Hammond, M.; Cichella, V.; Lamuta, C. Bioinspired Soft Robotics: State of the Art, Challenges, and Future Directions. Current Robotics Reports 2023, 4, 65-80. [CrossRef]
- Biological Robots: Perspectives on an Emerging Interdisciplinary Field. Soft Robotics 2023, 10, 674-686. [CrossRef]
- Isaka, K.; Tsumura, K.; Watanabe, T.; Toyama, W.; Sugesawa, M.; Yamada, Y.; Yoshida, H.; Nakamura, T. Development of underwater drilling robot based on earthworm locomotion. Ieee Access 2019, 7, 103127-103141.
- Zhu, J.; Lyu, L.; Xu, Y.; Liang, H.; Zhang, X.; Ding, H.; Wu, Z. Intelligent soft surgical robots for next-generation minimally invasive surgery. Advanced Intelligent Systems 2021, 3, 2100011.
- Tse, Z.; Chen, Y.; Hovet, S.; Monfaredi, R.; Xu, S.; Wood, B.; Cleary, K. Soft Robotics in Medical Applications. Journal of Medical Robotics Research 2018, 03. [CrossRef]
- Tauber, F.J.; Slesarenko, V. Early career scientists converse on the future of soft robotics. Front Robot AI 2023, 10, 1129827. [CrossRef]
- Pan, M.; Yuan, C.; Liang, X.; Dong, T.; Liu, T.; Zhang, J.; Zou, J.; Yang, H.; Bowen, C. Soft Actuators and Robotic Devices for Rehabilitation and Assistance. Advanced Intelligent Systems 2022, 4, 2100140. [CrossRef]
- Delmerico, J.; Mintchev, S.; Giusti, A.; Gromov, B.; Melo, K.; Horvat, T.; Cadena, C.; Hutter, M.; Ijspeert, A.; Floreano, D.; et al. The current state and future outlook of rescue robotics. Journal of Field Robotics 2019, 36, 1171-1191. [CrossRef]
- Aracri, S.; Giorgio-Serchi, F.; Suaria, G.; Sayed, M.E.; Nemitz, M.P.; Mahon, S.; Stokes, A.A. Soft robots for ocean exploration and offshore operations: A perspective. Soft Robotics 2021, 8, 625-639.
- Hughes, J.; Culha, U.; Giardina, F.; Guenther, F.; Rosendo, A.; Iida, F. Soft manipulators and grippers: A review. Frontiers in Robotics and AI 2016, 3, 69.
- Wegener, K.; Damm, O.; Harst, S.; Ihlenfeldt, S.; Monostori, L.; Teti, R.; Wertheim, R.; Byrne, G. Biologicalisation in manufacturing–Current state and future trends. CIRP Annals 2023.
- Gao, S.; Dai, Y.; Nathan, A. Tactile and Vision Perception for Intelligent Humanoids. Advanced Intelligent Systems 2022, 4, 2100074. [CrossRef]
- Xiong, J.; Chen, J.; Lee, P.S. Functional Fibers and Fabrics for Soft Robotics, Wearables, and Human–Robot Interface. Advanced Materials 2021, 33, 2002640. [CrossRef]
- Islam, M.A.; Talukder, L.; Al, M.F.; Sarker, S.K.; Muyeen, S.M.; Das, P.; Hasan, M.M.; Das, S.K.; Islam, M.M.; Islam, M.R.; et al. A review on self-healing featured soft robotics. Frontiers in Robotics and AI 2023, 10. [CrossRef]
- Roels, E.; Terryn, S.; Iida, F.; Bosman, A.; Norvez, S.; Clemens, F.; Van Assche, G.; Vanderborght, B.; Brancart, J. Processing of Self-Healing Polymers for Soft Robotics. Advanced materials (Deerfield Beach, Fla.) 2021, 34, e2104798. [CrossRef]
- Horvath, M.A.; Hu, L.; Mueller, T.; Hochstein, J.; Rosalia, L.; Hibbert, K.A.; Hardin, C.C.; Roche, E.T. An organosynthetic soft robotic respiratory simulator. APL bioengineering 2020, 4.
- Duggal, A.S.; Malik, P.K.; Gehlot, A.; Singh, R.; Gaba, G.S.; Masud, M.; Al-Amri, J.F. A sequential roadmap to Industry 6.0: Exploring future manufacturing trends. Iet Communications 2022, 16, 521-531.
- Berrueta, T.A.; Murphey, T.D.; Truby, R.L. Materializing Autonomy in Soft Robots across Scales. Advanced Intelligent Systems 2024, 6, 2300111. [CrossRef]
- Potter, K.; Oloyede, J.; f, o. The Evolution of Robotics: Advancements, Impacts, and Ethical Considerations. Science Robotics 2024.
- Wachter, S.; Mittelstadt, B.; Floridi, L. Transparent, Explainable, and Accountable AI for Robotics. Science Robotics 2017, 2. [CrossRef]
- Daniel, S. The Impact of Artificial Intelligence on Employment and Workforce Dynamics in Contemporary Society Author(s). 2023.
- Elendu, C.; Amaechi, D.C.; Elendu, T.C.; Jingwa, K.A.; Okoye, O.K.; John Okah, M.; Ladele, J.A.; Farah, A.H.; Alimi, H.A. Ethical implications of AI and robotics in healthcare: A review. Medicine (Baltimore) 2023, 102, e36671. [CrossRef]
- Lin, Z.; Jiang, T.; Shang, J. The emerging technology of biohybrid micro-robots: A review. Bio-Design and Manufacturing 2022, 5, 107-132. [CrossRef]
- Mousa, M.; Soliman, M.; Saleh, M.; Radwan, A. Biohybrid Soft Robots, E-Skin, and Bioimpedance Potential to Build Up Their Applications: A Review. IEEE Access 2020, 8, 184524-184539. [CrossRef]
- Sohn, S.; Buskirk, M.V.; Buckenmeyer, M.J.; Londono, R.; Faulk, D. Whole organ engineering: Approaches, challenges, and future directions. Applied Sciences 2020, 10, 4277.
- Singh, A.V.; Varma, M.; Rai, M.; Pratap Singh, S.; Bansod, G.; Laux, P.; Luch, A. Advancing Predictive Risk Assessment of Chemicals via Integrating Machine Learning, Computational Modeling, and Chemical/Nano-Quantitative Structure-Activity Relationship Approaches. Advanced Intelligent Systems 2024, n/a, 2300366. [CrossRef]
- Singh, A.V.; Shelar, A.; Rai, M.; Laux, P.; Thakur, M.; Dosnkyi, I.; Santomauro, G.; Singh, A.K.; Luch, A.; Patil, R.; et al. Harmonization Risks and Rewards: Nano-QSAR for Agricultural Nanomaterials. Journal of Agricultural and Food Chemistry 2024, 72, 2835-2852. [CrossRef]
- Singh, A.V.; Bansod, G.; Mahajan, M.; Dietrich, P.; Singh, S.P.; Rav, K.; Thissen, A.; Bharde, A.M.; Rothenstein, D.; Kulkarni, S.; et al. Digital Transformation in Toxicology: Improving Communication and Efficiency in Risk Assessment. ACS Omega 2023, 8, 21377-21390. [CrossRef]
- Rai, M.; Singh, A.V.; Paudel, N.; Kanase, A.; Falletta, E.; Kerkar, P.; Heyda, J.; Barghash, R.F.; Pratap Singh, S.; Soos, M. Herbal concoction Unveiled: A computational analysis of phytochemicals' pharmacokinetic and toxicological profiles using novel approach methodologies (NAMs). Current Research in Toxicology 2023, 5, 100118. [CrossRef]
- Singh, A.V.; Bansod, G.; Schumann, A.; Bierkandt, F.S.; Laux, P.; Nakhale, S.V.; Shelar, A.; Patil, R.; Luch, A. Analyzing Tattoo Pigments in a Laboratory Setting: Application of UV-Vis and FTIR Spectroscopy Methods supported with Chemometric Modelling. Researchsquare (Preprint) 2023. [CrossRef]


| Materials Type | Applications Field | Material Selection: Application | Actuation Criteria: Application |
|---|---|---|---|
| Electroactive Polymers | Soft Actuators | Flexibility, Responsiveness, Durability | Electrical Stimulation, Mechanical Deformation |
| Magnetic Soft Composites | Soft machines | Magnetic Responsiveness, Structural Integrity | Magnetic Fields |
| Stimuli-Responsive Hydrogels and Liquid Crystal Elastomers | Soft Actuators, Robotics | Swelling Behavior, Mechanical Properties | Various Stimuli (e.g., Temperature, pH) |
| Shape Memory Alloys | Biomedical Devices | Shape Recovery, Biocompatibility | Thermal Activation |
| Chemical-Responsive Materials | Adaptive Structures | Chemical Sensitivity, Structural Adaptability | Chemical Triggers |
| Company/Group Name | Bioinspired Theme | Product Name | Usage | Reference |
|---|---|---|---|---|
| Fusion Bionic | Nano-scale Surface Texture | Bio-inspired Nano Texture | Surface applications in various fields like medical and aerospace | [34] |
| GreenPod Labs | Plant-Based Volatiles | Packaging Sachets | Sustainable packaging | [35] |
| Intropic Materials | Enzymatic Processes | Plastic Degradation | Plastic waste management | [36] |
| Biohm | Biomimicry | Circular Construction | Sustainable construction | [37] |
| Terrapin Bright Green | Biomimicry in Transportation | Biomimicry-inspired Transportation Solutions | Sustainable transportation systems | [38] |
| TISSIUM | Gecko Adhesion | Surgical Adhesive | Medical surgeries (Tissue reconstruction) | [39] |
| SoftGripping | Soft grippers | GorillaFingers | Pick and place | [40] |
| Robot Characteristics | Soft machines | Conventional Hard Robotics |
|---|---|---|
| Compliance |
Able to bend and twist with high curvatures and exhibit unprecedented adaptation, sensitivity and agility. Soft materials are elastic and can deform and absorb much of the energy arising from a collision, so large Degrees of Freedom (DoF). |
Poor grasping power and mobility over soft surfaces. Hard materials perform single tasks efficiently, but often with limited compliance due to rigid links and joints. |
| Adaptability |
Soft machines can adapt their shape to the environment, enabling their use in confined spaces. |
Hard robots have limited adaptability due to rigid links and joints, restricting their use in confined spaces. |
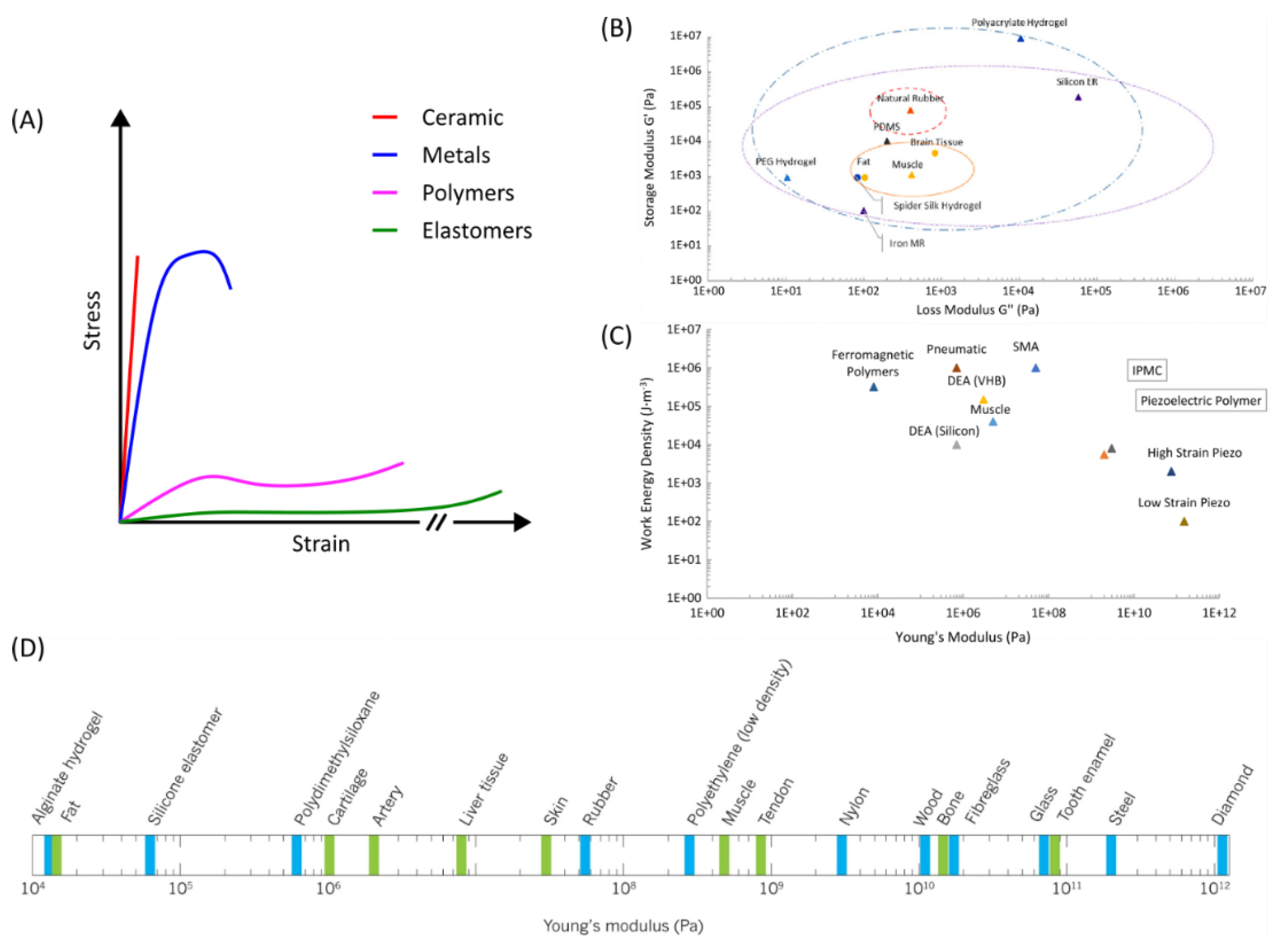
| Materials Young Modulus |
Soft materials like skin or muscle tissue have a Young's Modulus ranging from 10^4 to 10^9 Pa. |
Hard materials like metals or hard plastics have a Young's Modulus ranging from 10^9 to 10^12 Pa. |
| Actuation force |
Soft structures are usually able to apply weak forces and torques. |
Conventional actuators can apply high forces and torques. |
| Ease of integrating subsystems |
Integrating sensing, actuation, computation, power storage, and communication into controllable soft-bodied material is difficult. Subsystems may move with respect to each other. |
Subsystems can be attached firmly to the body. |
| Ease of fabrication |
Soft machines are usually fabricated using multimaterial 3D printing, soft lithography, and molding and casting. |
Hard robots are usually fabricated using 3D printing, machining, and injection molding. |
| Ease of control |
Soft machines have an infinite number of degrees of freedom due to their ability to bend, twist, stretch, compress, buckle, wrinkle, and exhibit elasticity. Control is challenging and requires new approaches to modeling, control, dynamics, and high-level planning. |
Hard robots generally have 6 Degrees of Freedom (DoF) (three rotations and three translations about the x, y, and z axes). |
| Actuation principle |
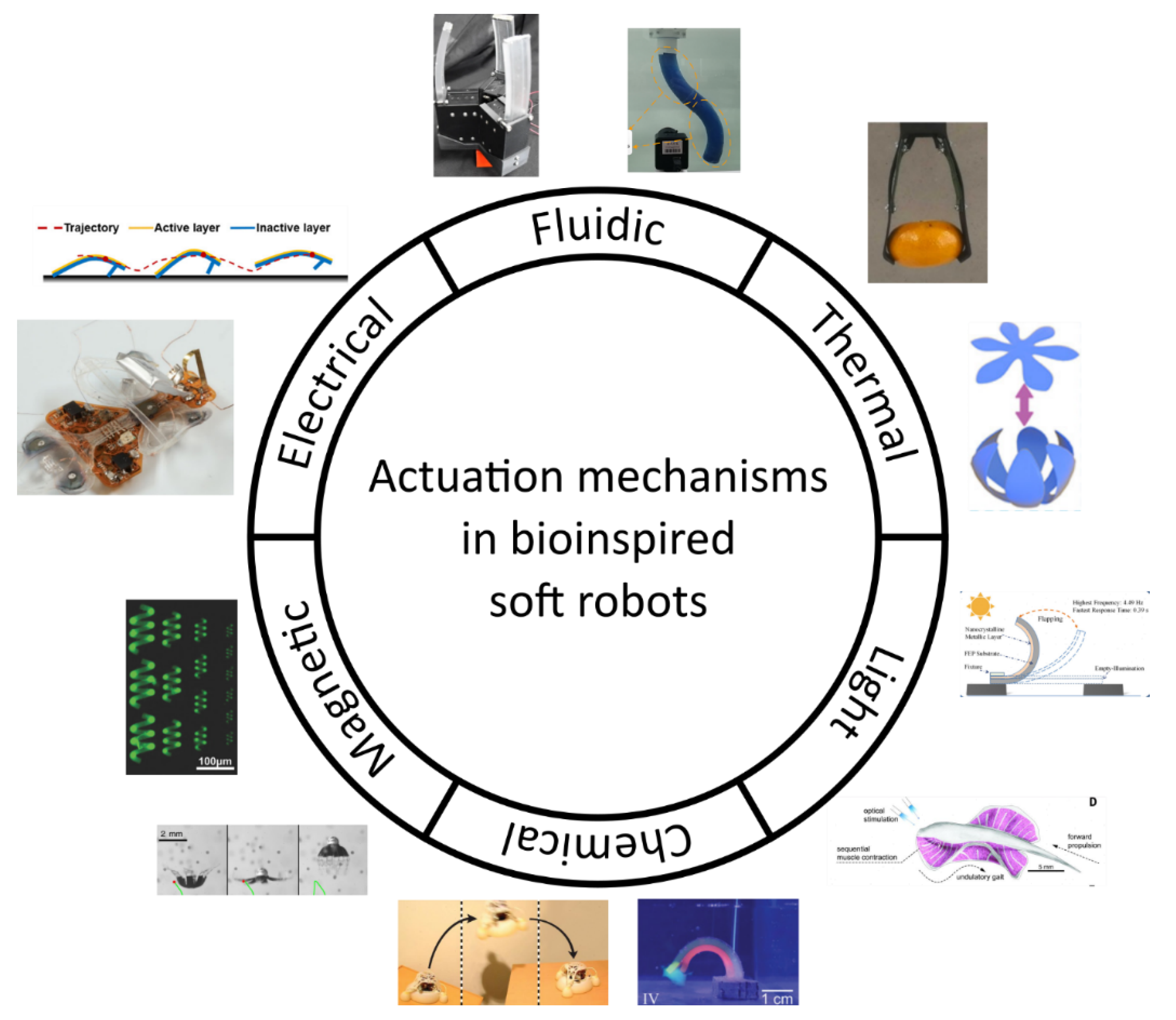
Soft machines utilize fluidic, electrical, light-based, magnetic, chemical, or thermal actuation. |
Hard robots usually utilize electric or fluidic actuation. |
| Sensing |
Soft machines use piezoelectric polymers, stretchable electronics, and various strains including tensile, shear, or curvature measured with layered channel geometries for sensing environmental signals. |
Hard robots use encoders, metal or semiconductor strain gauges, or inertial measurement units (IMUs) for sensing. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



