
Submitted:
14 February 2025
Posted:
20 February 2025
You are already at the latest version
Abstract
This paper presents a robust fitted mesh finite difference method for solving a system of n singularly perturbed two parameter convection-reaction-diffusion delay differential equations defined on the interval [0,2]. Leveraging a piecewise uniform Shishkin mesh, the method adeptly captures the solution’s behavior arising from delay term and small perturbation parameters. The proposed numerical scheme is rigorously analyzed and proven to be parameter-robust, exhibiting nearly first-order convergence. Numerical Illustration is included to validate the method’s efficiency and to confirm the theoretical predictions.
Keywords:
singularly perturbed delay differential equations
; numerical methods
; convection - diffusion equations
; Shishkin meshes
; boundary layer
; uniform convergence
MSC: 65L11; 65L12; 65L20; 65L50; 65L70
1. Introduction
Singularly perturbed differential equations (SPDEs) are integral to many fields, including fluid dynamics, chemical reactor theory, population dynamics and control systems [1,2]. Within this class, singularly perturbed delay differential equations (SPDDEs) present additional complexities due to boundary and interior layers that arise from small perturbation parameters and delay terms, making numerical solutions challenging. Established techniques like fitted mesh [3] and fitted operator methods [4] have provided accurate solutions for SPDEs, with notable work by Cen [5], who used a hybrid scheme with a Shishkin mesh to achieve near-second-order convergence. Similarly, Gracia et al. [6] developed a monotone method for SPDEs with two parameters influencing convection and diffusion. SPDDEs typically involve boundary value problems influenced by two small parameters, and , whose interactions generate complex layer behavior governed by the ratio . This work aims to construct a parameter-robust numerical method for system of n SPDDEs as both parameters approach zero, addressing boundary and interior layers accurately regardless of perturbation values. Stability is established, and bounds for the solution’s derivatives are derived, supporting the convergence of the fitted mesh finite difference approach, which attains nearly first-order accuracy. Several studies have addressed singular perturbation problems, emphasizing their asymptotic behaviour, the development of parameter uniform methods and delay differential equations to achieve robust and accurate solutions across varying the perturbation parameters [7,8,9]. The novelty of this research lies in addressing a system of n SPDDEs involving two small parameters in a convection-diffusion context, contrasting with prior studies that either considered single delay equations [10], system of two equations without delay terms [11] and system of two equations with delay terms [12]. This paper considers interacting variables affected by both delay and two distinct small perturbation parameters, and introducing challenges in boundary and interior layer formation. To overcome these challenges, this paper presents advanced mesh techniques and robust numerical schemes that effectively resolve layers and achieve parameter uniform convergence, significantly enhancing the numerical analysis of SPDDEs.
2. Formulation of the Problem
The system of singularly perturbed delay differential equations involving two small parameters is under consideration,
Here, where , are small parameters satisfying and is another small parameter with . The coefficient functions , , and are all sufficiently smooth throughout the domain and The is sufficiently smooth over the interval . The value of is determined as When , the above problem without delay, has been considered in [13]. The problem demonstrates boundary layers influenced by both and , in particular, the layers are influenced by the ratio of . If , , the reduced problem can be expressed as
with boundary conditions This predicts that there will be a boundary layer of width near and an interior layer at , arising from the unit delay component, under the assumption that . Additionally, a similar boundary layer of width is anticipated near , along with an interior layer at , if . If , , the reduced problem is
with boundary conditions This problem remains to exhibit singular perturbation behavior due to the parameter . It is expected that a boundary layer with a width is anticipated near , and an interior layer at (due to the delay), unless the solution at differs from . Additionally, a boundary layer of width is anticipated near , with an interior layer at , if . Numerical experiments indicate that the interior right layer weakens considerably when . Consider the problem
with boundary conditions where for , and .
3. Analytical Results
This section presents a minimum principle, establish a stability result for the problem described by Equation (1) and provide its estimates for the derivatives of the solution.
Lemma 3.1.
Let be such that , , on and on , , , then on .
Proof.
Assume and are such that . Suppose . Then, cannot be at the boundaries 0 or 2. At , the first derivative of , denoted as and the second derivative .
Claim (i):. If , then
which contradicts the assumption that on . Thus, .
Claim (ii):. If , then
which contradicts the assumption that on . Hence, . When , the differentiability of at . If does not exist, then , which contradicts the condition . If is differentiable at , then Since all entries of , and are continuous on , there exists an interval where
Next, the second derivative is examined, if for any , then , which leads to a contradiction. Therefore, the assumption on the interval . This indicates that is strictly decreasing over . Given that and is continuous on , it follows that on . As a result, the continuous function cannot attain a minimum at , which contradicts the assumption that . Thus, on . The proof of the lemma is complete.□
Lemma 3.2.(Stability Result)
Let . For ,
Proof.
Define
Consider the functions , where . Clearly, , , and for all . Hence, by Lemma 3.1, proves that , which yields the required result. The proof of the lemma is complete.□
Theorem 3.1.
where the constant C is independent of and μ , and
Proof.
The proof follows the methodology outlined in Lemma 2.2 of [8]. For any , a neighborhood such that and . According to the mean value theorem, there exists a satisfying
Now, it follows that Thus,
The bounds for is obtained from Equation (1). Similarly, the bounds of and can be established for higher-order derivatives through analogous manipulations. The proof of the theorem is complete. □
4. Shishkin Decomposition of the Solution
For each of the cases and , is expressed by where
Case (i):
In this case, for ,
Case (ii):
In this case, for ,
To ensure the jump conditions at in Equations (10) and (19) are satisfied, the constants and must be selected appropriately. Additionally, the constants and should be determined independently for the cases and , ensuring they meet the bounds required for the singular component. Given that and are bounded by constants that do not depend on and , even though , , and are functions of and , the magnitudes , , and are constants independent of and .
5. Bounds on the Regular Component and Its Derivatives
To establish the result, by estimating bounds for the smooth components and their derivatives on the interval and then use these bounds to extend the estimates to the interval . Specifically, by decomposing each component with respect to , then apply to the first components, followed by for the first components, and so on. This step-by-step decomposition approach is as follows for both cases.
Case (i):
Establishing the bounds of the regular components and , it is broken down as
where is the solution of
where is the solution of
where is the solution of
where is the solution of
Since the matrix has entries that are bounded, it follows that, for ,
To establish the estimation the bounds and for and notations are defined for , with . To proceed with the analysis, let us focus on the first equations of the system described by equations (34) and (35). It follows that
The next step involves decomposing similarly to equation above
Similarly proceeding like above, the problem associated with , is similar as in (34) and (35). By applying the estimates, the bound on the solution is obtained for , . Then, by applying Theorem 3.1, and yields . Therefore, similarly for , the bounds implies . In an analogous way, singularly perturbed systems of l equations is derived, where ,
Using similar decomposition, it can be found that similarly for , it follows that . Thus, satisfies the following bound for and ,
Case (ii):
Establishing the bounds of the regular components and , it is broken down as
Furthermore, the maximum principle for a linear first-order operator is established and demonstrated within the framework of a terminal value problem. Define the operators
Decompose individually and similarly proceeding like case(i), the following bounds are established for all i in the range and k in the range ,
6. Layer Functions
The functions for the layers are denoted by and are specified over the interval ,
The layer functions are specified over ,
where ; ; , for . Following the Lemma 5 presented in [13], the points which satisfy the conditions, and for the case , can be proved.
Similarly for the case , it can be shown that there exist points in such that
7. Bounds on the Singular Component and Its Derivatives
Theorem 7.1.
Let satisfy problems (13), (16) and (22), (25) for the cases and respectively. Consequently, the components of and , p=1,2 satisfy the following bounds on . For the case ,
For the case ,
Moreover, the components satisfy the following bounds of . For the case ,
For the case ,
Proof. For the case , defining the barrier functions , where for . It is evident that and . Additionally, for all x in the interval . Therefore, it can be demonstrated that . Considering the equation of from (22),
This can also be written as, where Now, taking ,
where is the indefinite integral of . Using the bounds on , it is established that . Using the inequality and using integration by parts, it follows from the above that
Using a similar argument, it can be Differentiating the equation and using a similar procedure as above, it can be shown that
It has been established that Consequently,
By introducing the barrier function it can be demonstrated that on and which implies
By introducing another barrier function It can be derived that Differentiating the equations of once and applying the bounds of and yields
Similarly, this leads to analogous results for on . Next, the bounds on for the case are derived. The bounds on can be derived by defining the barrier functions, To bound , the argument proceeds by examining the equation of in (13) and proceed by applying the result from Theorem 3.1, To improve the above bound on , this process continues by differentiating from (13) once leads to To establish the necessary bounds, the barrier functions is defined as follows,
The bound on is obtained from the equation of in (13). To derive the bounds , by differentiating twice and thrice respectively and an argument analogous to the one used to bound leads to the bounds, which are required. The bound on is obtained by differentiating equation of in (13) once and using the bounds of and , this approach allows us to obtain
Similarly, it can be derived for on [1,2]. The bounds on is established and its derivatives for the case . In this scenario, is decomposed over the interval .
Since is a matrix with bounded entries and hence for , it implies that
Now using Theorem 3.1 and (50), for the choice of then
The decomposition for each component with respect to is given , then apply to the first components, followed by for the first components, and so on. Thus, the following bound for all i in the range and k in the range is as follows Utilizing the previous derivations, deriving similarly finding Similarly derive for , for the case , the bounds on are obtained by the above analogous arguments to those applied in bounding . The proof of the theorem is complete. □
8. Sharper Bounds for and
To achieve sharper bounds on the derivatives of the singular components and , These components are further decomposed for the intervals [0,1] and [1,2]. This refinement will help in demonstrating nearly first-order convergence of the proposed method. Now, the case is focused. In addition to that, the following ordering holds
For and , it is decomposed as follows, on [0,1] and on [1,2], where the components are defined, on the interval , by
for
and for
On the interval
for
and for
withand , on .
Lemma 8.1.
Given the decompositions of component for each ρ and i , , satisfy the following estimates hold on [0,1]
and the following estimates hold on [1,2]
Proof. For the interval [0,1], differentiating (54) thrice,
Then for , using Theorem 7.1,
Since for , , and hence
Differentiating (55) thrice on , For ,
For ,
From (56) and , it is evident that for , and for , Since for , it can be concluded that for any and ,
Hence, Similar arguments lead to and Similarly, it is not hard to find for the interval [1,2]. The proof of the Lemma is complete. □
Lemma 8.2.
Given the decompositions of component for each ρ and i , , for satisfy the following estimates hold on for and for
Proof. The proof follows the same logic as Lemma 8.1. Analogously, the decompositions can be made for and in both case . The corresponding bounds for these components can be demonstrated in a similar manner.
9. Numerical Method
This section explains the numerical method proposed for (1).
9.1. Shishkin Mesh
For these cases and , appropriate Shishkin meshes are developed over interval .
Case (i):
A piecewise uniform Shishkin mesh is constructed over the interval , the interval is divided into subintervals based on transition points as follows, The transition points for are defined as
for , ensuring finer mesh density near layer regions. The intervals are populated with points as follows, points on all inner regions and for , a uniform mesh of is placed . If each takes the left choice in its definition, the mesh becomes a classical uniform mesh, with and a constant step size . The step sizes in the intervals are defined as , for , and . At each transition point , the change in step size from to is given by , where , with when . The mesh becomes a classical uniform mesh when for all , ensuring uniformly spaced transition points and a constant step size throughout the interval.Then, from (60), and also
Case (ii):
A piecewise uniform Shishkin mesh is constructed over the interval , the interval is divided into subintervals based on transition points as follows, The transition points for are defined as
for , ensuring finer mesh density near layer regions. The intervals are populated with points as follows, points on all inner regions, for a mesh of is placed and for a mesh of is placed . If each takes the left choice in its definition, the mesh becomes a classical uniform mesh, with and a constant step size . The step sizes in the intervals are defined as , for , and for . At each transition point , the change in step size from to is given by , where , with when . The mesh becomes a classical uniform mesh when for all , ensuring uniformly spaced transition points throughout the interval. Then, from (61), and also
10. The Discrete Problem
The discrete problem is defined as follows,
with boundary conditions specified as follows, where, Let
The discrete derivatives are defined as follows
with
11. Numerical Results
This section derives a discrete minimum principle, demonstrates a discrete stability analysis of the proposed numerical method, and proves its first-order convergence.
Lemma 11.1.(Discrete Minimum Principle) Assume that the mesh function satisfies and . Then, if for and for and it implies that for all .
Proof. Let and be such that and suppose . Then, , , and . Therefore, Consider the two cases, for , if , then
which is a contradiction, which gives . For ,if , then
which is a contradiction, which gives . The only remaining possibility is that . Thus, by hypothesis, it follows that This implies and since , it holds that Consequently, it follows that Now, consider the operator acting on the solution at
leading to a contradiction, implying that for all . The proof of the lemma is complete. □
Lemma 11.2.(Discrete Stability Result) If is any mesh function, then
11.1. Error Estimate
Analogous to the continuous case, the discrete solution can be decomposed into and as defined below.
It is clear that
Proof.
Determining the local truncation error
for . It is established that . In this case , from (39) and (42), Using Lemma 11.2, consider the mesh functions, Provided that the value of C is sufficiently large, it follows that Thus, Similarly, For the case , Similarly, Thus,
The proof of the lemma is complete. □
The bounds on the error in the singular components and are estimated for the case . These estimates are derived utilizing the mesh functions , where , which are defined over ,
Lemma 11.4.
For the case , the layer components and , satisfy the following bounds on ,
Proof. This result can be demonstrated by defining the appropriate mesh functions and and noticing that and . Furthermore, and . Consequently, the discrete minimum principle yields the expected result. The proof of the lemma is complete. □
Proof. The local truncation error is given by
where . Since ,the mesh is uniform, then the value of . In this instance, and .
similarly, Let the barrier function given by
on , where is a constant and it satisfies , The mesh functions described above is inspired by those constructed in [14]. Now, that , , , and . Then, define . It is easy to observe that and . Hence, by applying minimum principle, Simillarly, The proof of the Lemma is complete. □
Proof. The required result is established for each mesh point by partitioning the interval as shown in figure
 for . In each of these scenarios, first an estimate for the local truncation error is derived. This is followed by the formulation of a suitable barrier function, designed to capture the essential properties of the solution within a specified domain. By utilizing these barrier functions, the desired estimate is obtained.
for . In each of these scenarios, first an estimate for the local truncation error is derived. This is followed by the formulation of a suitable barrier function, designed to capture the essential properties of the solution within a specified domain. By utilizing these barrier functions, the desired estimate is obtained.
for . In each of these scenarios, first an estimate for the local truncation error is derived. This is followed by the formulation of a suitable barrier function, designed to capture the essential properties of the solution within a specified domain. By utilizing these barrier functions, the desired estimate is obtained.
Case (a):.
Clearly . Then, utilizing the standard approach to local truncation through Taylor expansions, error estimates is obtained, which are valid for and ,
Let the mesh functions be defined for , where and ,
Utilizing the minimum principle and barrier function , it has been established that similarly for the interval (1,2),
Case (b):.
The two scenarios considered are Case (b1): and Case (b2):. Case (b1): , this case, the mesh is uniform within the interval . Consequently, for any , for . Then,
Now for and , define,
Utilizing the minimum principle and barrier function , it has been derived that similarly for the interval (1,2), Case (b2): , for this case, , and hence for , by utilizing the standard approach to local truncation errors in Taylor series expansions, then,
Now using Lemma 8.1 , it is not hard to derive that
and for ,
Specify
and for ,
Case (c):.
Here are the three scenarios Case (c1): , Case (c2): and for some q, , Case (c3):. Case (c1): , since and the mesh remains uniform over the interval , it can be concluded that for , and hence
For ,
Utilizing the minimum principle and barrier function , it has been derived that similarly for the interval (1,2), Case (c2): and for some q, . In this case, since , the region , exhibits a uniform mesh points in this region satisfies , for any point . By utilizing the approach to local truncation is derived from Taylor expansions,
Now, utilizing Lemma 8.1, it is evident that for ,
and for ,
Now specify, for ,
and for ,
Case (c3):. In the previous arguments of the case (c2), replacing q by m and applying the inequality , the estimates are valid for . For ,
and for ,
For , define
and for ,
Case (d):
There are three distinct cases to consider, Case (d1): , Case (d2): and for some q, and Case (d3):. Case (d1): . In this case, the mesh is uniformly distributed over the interval . The corresponding result for this situation is derived in Lemma 11.5. Case (d2): and for some q, , for this scenario, based on the definition of , it can be shown that and by applying analogous arguments similar to Case (c2) lead to the estimates for . For ,
and for ,
Now define, for ,
and for ,
respectively. Case (d3): , let be defined as . Then, considering the interval ,
Hence, Thus, for each of the cases, the barrier function is constructed and using minimum principle, it has been derived that Therefore,
The proof of the lemma is complete.□
The bounds on the error in the singular components and are estimated for the case . These estimates are derived utilizing the mesh functions , where , which are defined over ,
with , for , for .
Proof. Assume that , for , the local truncation error is given by
where . Since , the mesh is uniform, then the value of . In this instance, ,
This is established for each mesh point by partitioning the interval as follows
 for . In each of these scenarios, first an estimate for the local truncation error. is derived. This is followed by the formulation of a suitable barrier function, designed to capture the essential properties of the solution within a specified domain. By utilizing these barrier functions, the desired estimate is obtained.
for . In each of these scenarios, first an estimate for the local truncation error. is derived. This is followed by the formulation of a suitable barrier function, designed to capture the essential properties of the solution within a specified domain. By utilizing these barrier functions, the desired estimate is obtained.
for . In each of these scenarios, first an estimate for the local truncation error. is derived. This is followed by the formulation of a suitable barrier function, designed to capture the essential properties of the solution within a specified domain. By utilizing these barrier functions, the desired estimate is obtained.
Case (a):.
Clearly then, utilizing the approach to local truncation in Taylor expansions error estimates is obtained, which are valid for and ,
Case (b):.
The two scenarios considered are Case (b1): and Case (b2):. Case (b1): , this case, the mesh is uniform within the interval . Consequently, for any , for . Then,
Case (b2):, for this case, and hence for , by utilizing the standard approach to local truncation errors in Taylor series expansions, the term then, using Lemma 8.2
Case (c):.
Here are the three scenarios Case (c1): ,Case (c2): and for some q, and Case (c3):. Case (c1): , since and the mesh remains uniform over the interval ,it can be concluded that for , and hence
Case (c2): and for some q, . Since , the mesh is uniform in , which implies that , for . By utilizing the approach to local truncation is derived from Taylor expansions, outlined in Lemma 8.2
Case (c3):. In the previous arguments of the case (c2), replacing q by m and applying the inequality , the estimates are valid for .
Case (d): There are three distinct cases to consider, Case (d1): , Case (d2): and for some q, and Case (d3):. Case (d1): . In this case, the mesh is uniformly distributed over the interval . The corresponding result for this situation is derived in Lemma 11.5. Case (d2): and for some q, , for this scenario, based on the definition of , it can be shown that and by employing arguments analogous to Case (c2), it leads to the estimates for . Case (d3): . Let be defined as on the interval . Hence, and similarly,. Therefore,
The proof of the lemma is complete.□
To establish the bounds on the error , the mesh function is defined over
Lemma 11.8.
For the case , the layer components and , satisfy the following bounds on ,
Proof. This result can be demonstrated by defining the mesh functions and . Also, since , . Hence, . Also, for an appropriate choice of C, it follows that . Further, and . Hence, by the minimum principle , and , for . Hence, The proof of the lemma is complete.□
Lemma 11.9.
At each point , , for the case .
Proof. The local truncation error is given by
where . Consider the case then, . Hence, Consider the case . Hence,
for , similarly like above
Examine the mesh region . It is known that , then, , For , The proof of the lemma is complete.□
Theorem 11.1.
for both of the cases and .
Proof. The proof follows Lemmas 11.3, 11.5,11.7 and 11.9.
12. Numerical Illustration
12.1. Example
The numerically approximation of the solution to the following system on the interval is obtained by applying the proposed method to both cases where and
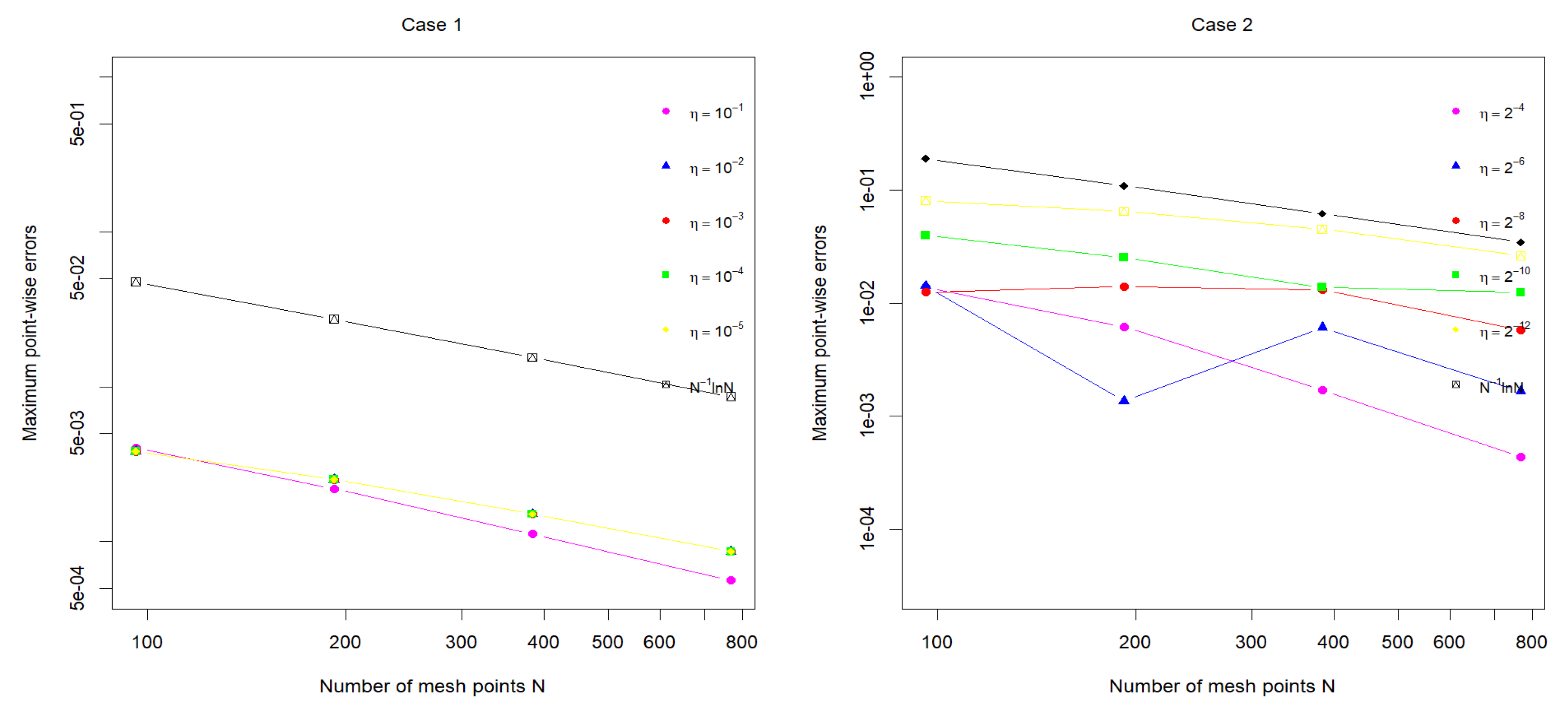
where, . To evaluate the order of convergence, maximum pointwise errors and error constants, a modified two-mesh algorithm was utilized. The results are summarized in Tables 1 and 2. As the parameter decreases, the error stabilizes for each N, while the maximum pointwise error decreases and the observed order of convergence improves with increasing N, confirming the theoretical predictions. Figure 1 and 2 display the solution profiles for the n- system over the interval . In Figure 1, corresponding to the condition boundary layers are observed for the components () near , and consistent with theoretical expectations. On the other hand, Figure 2 illustrates the case where Here, layers are observed for near , while boundary layers emerge near and delay near . Log-log plots effectively illustrate the relationship between the number of mesh points N and the maximum pointwise errors, offering a clear depiction of convergence behavior. Figure 3 presents the maximum pointwise errors for different values in cases 1 and 2, demonstrating how the error decreases as N increases. These plots validate theoretical predictions and emphasize the impact of on the accuracy of the numerical method.

Table 1.
Values of and when for
| Number of mesh points | ||||
|---|---|---|---|---|
| 96 | 192 | 384 | 768 | |
| 0.1E+00 | 0.4050E-02 | 0.2201E-02 | 0.1123E-02 | 0.5639E-03 |
| 0.1E-01 | 0.3832E-02 | 0.2522E-02 | 0.1509E-02 | 0.8641E-03 |
| 0.1E-02 | 0.3832E-02 | 0.2522E-02 | 0.1509E-02 | 0.8641E-03 |
| 0.1E-03 | 0.3832E-02 | 0.2522E-02 | 0.1509E-02 | 0.8641E-03 |
| 0.1E-04 | 0.3832E-02 | 0.2522E-02 | 0.1509E-02 | 0.8641E-03 |
| 0.4050E-02 | 0.2522E-02 | 0.1509E-02 | 0.8641E-03 | |
| 0.6828E+00 | 0.7408E+00 | 0.8049E+00 | ||
| 0.2424E+00 | 0.2424E+00 | 0.2329E+00 | 0.2140E+00 | |
| The order of convergence | ||||
| Computed error constant, | ||||
Table 2.
Values of and when for
| Number of mesh points | ||||
|---|---|---|---|---|
| 96 | 192 | 384 | 768 | |
| 0.625E-01 | 0.1369E-01 | 0.6205E-02 | 0.1707E-02 | 0.4365E-03 |
| 0.156E-01 | 0.1420E-01 | 0.1353E-02 | 0.6080E-02 | 0.1669E-02 |
| 0.391E-02 | 0.1258E-01 | 0.1401E-01 | 0.1317E-01 | 0.5811E-02 |
| 0.977E-03 | 0.4006E-01 | 0.2536E-01 | 0.1383E-01 | 0.1242E-01 |
| 0.244E-03 | 0.8087E-01 | 0.6491E-01 | 0.4528E-01 | 0.2625E-01 |
| 0.8087E-01 | 0.6491E-01 | 0.4528E-01 | 0.2625E-01 | |
| 0.3170E+00 | 0.5195E+00 | 0.7862E+00 | ||
| 0.1742E+01 | 0.1742E+01 | 0.1514E+01 | 0.1093E+00 | |
| The order of convergence | ||||
| Computed error constant, | ||||
13. Conclusions
This paper presented a robust fitted mesh finite difference method for solving a system of two-parameter singularly perturbed delay differential equations of convection-reaction-diffusion type. The method leverages a piecewise uniform Shishkin mesh to address the intricate challenges posed by small perturbation parameters and delay terms across multiple equations. Our theoretical analysis demonstrates that the proposed scheme attains nearly first-order convergence in the maximum norm, uniformly with respect to the perturbation parameters. Numerical experiments confirm the method’s robustness and accuracy, demonstrating its capability to resolve boundary layers with precision across a system of equations. This work marks a significant advancement in numerical techniques for SPDDEs, emphasizing the critical importance of developing parameter-uniform methods to address the unique challenges posed by systems of equations with multiple layers and delays. Future investigations could focus on extending these methods to enhance computational efficiency, improve convergence rates and handle more intricate systems encountered in real-world applications.
References
- Bhatti, M. M. , Alamri, S. Z., Ellahi, R., & others. (2021). Intra - uterine particle - fluid motion through a compliant asymmetric tapered channel with heat transfer. Journal of Thermal Analysis and Calorimetry, 144, 2259–2267. [CrossRef]
- Glizer, V. (2003). Asymptotic analysis and solution of a finite-horizon H∞ control problem for singularly-perturbed linear systems with small state delay. Journal of Optimization Theory and Applications, 117, 295–325. [CrossRef]
- Miller, J. J. H. , O’Riordan, E., & Shishkin, G. I. (2012). Fitted numerical methods for singular perturbation problems: error estimates in the maximum norm for linear problems in one and two dimensions. World Scientific.
- Doolan, E. P. , Miller, J. J. H., & Schilders, W. H. A. (1980). Uniform numerical methods for problems with initial and boundary layers, Boole Press.
- Cen, Z. (2005). Parameter-uniform finite difference scheme for a system of coupled singularly perturbed convection - diffusion equations. International Journal of Computer Mathematics, 82, 177–192. [CrossRef]
- Gracia, J. L. , O’Riordan, E., & Pickett, M. L. (2006). A parameter robust second order numerical method for a singularly perturbed two-parameter problem. Applied Numerical Mathematics, 56, 962–980. [CrossRef]
- O’Malley, R. E. (1967). Two-parameter singular perturbation problems for second-order equations. Journal of Mathematics and Mechanics, 16, 1143–1164.
- O’Riordan, E. , Pickett, M. L., & Shishkin, G. I. (2003). Singularly perturbed problems modeling reaction-convection-diffusion processes. Computational Methods in Applied Mathematics, 3, 424–442.
- Selvaraj, D. , & Mathiyazhagan, J. P. (2021). A parameter uniform convergence for a system of two singularly perturbed initial value problems with different perturbation parameters and Robin initial conditions. Malaya Journal of Matematik, 9, 498–505.
- Kalaiselvan, S. S. , Miller, J. J. H., & Sigamani, V. (2019). A parameter uniform numerical method for a singularly perturbed two-parameter delay differential equation. Applied Numerical Mathematics, 145, 90–110. [CrossRef]
- Nagarajan, S. (2022). A parameter robust fitted mesh finite difference method for a system of two reaction-convection-diffusion equations. Applied Numerical Mathematics, 179, 87–104. [CrossRef]
- Arthur, J. , Chatzarakis, G. E., Panetsos, S. L., & Mathiyazhagan, J. P. (2025). A robust-fitted-mesh-based finite difference approach for solving a system of singularly perturbed convection–diffusion delay differential equations with two parameters. Symmetry, 17, 68. [CrossRef]
- Mathiyazhagan, P. , Sigamani, V., & Miller, J. J. H. (2010). Second order parameter-uniform convergence for a finite difference method for a singularly perturbed linear reaction-diffusion system. Mathematical Communications, 15, 587–612.
- Farrell, P. Robust computational techniques for boundary layers (1st ed.). Chapman and Hall/CRC. [CrossRef]
Figure 1.
Graphical representation of Numerical solutions for the case:
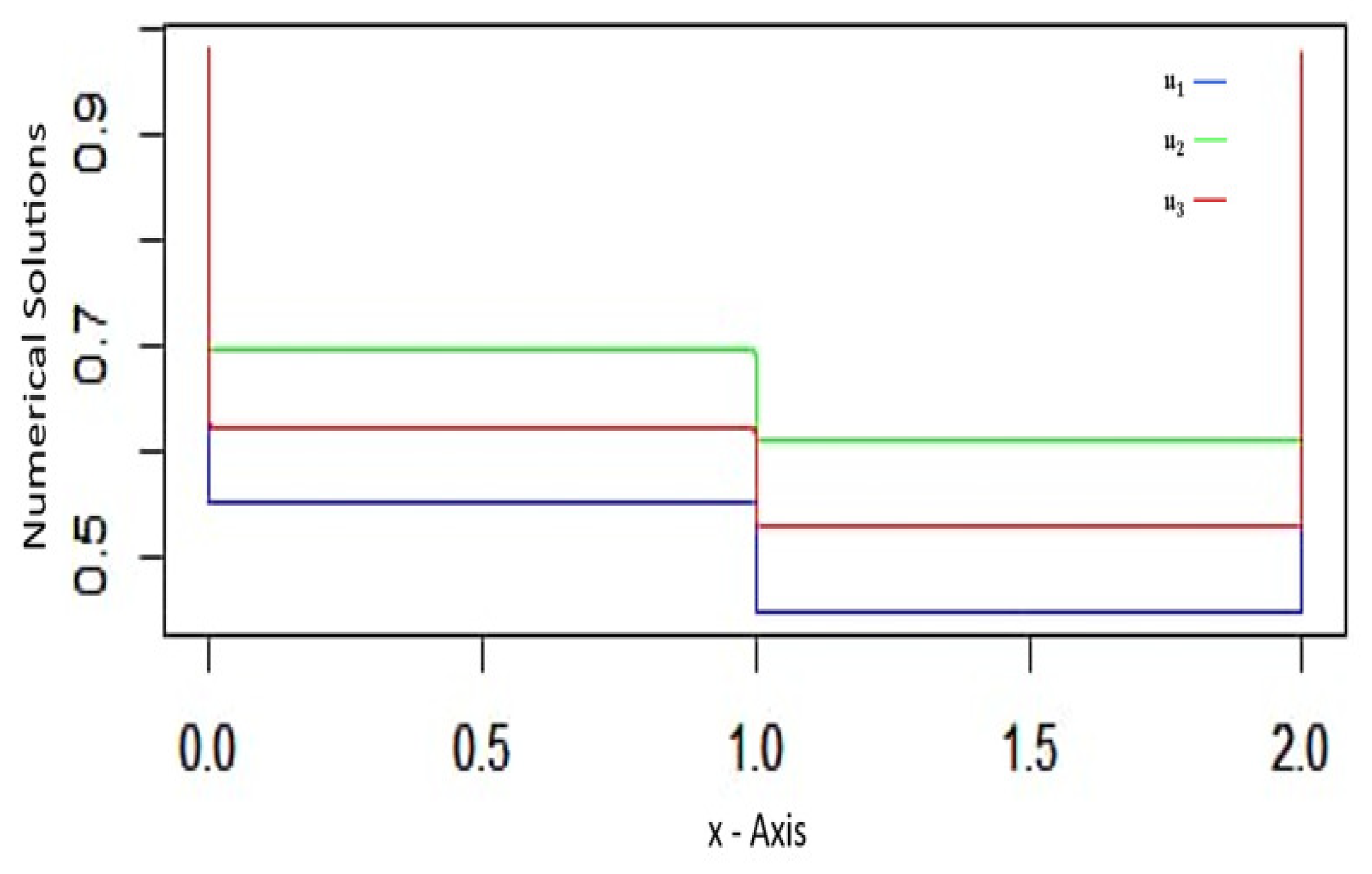
Figure 2.
Graphical representation of Numerical solutions for the case:
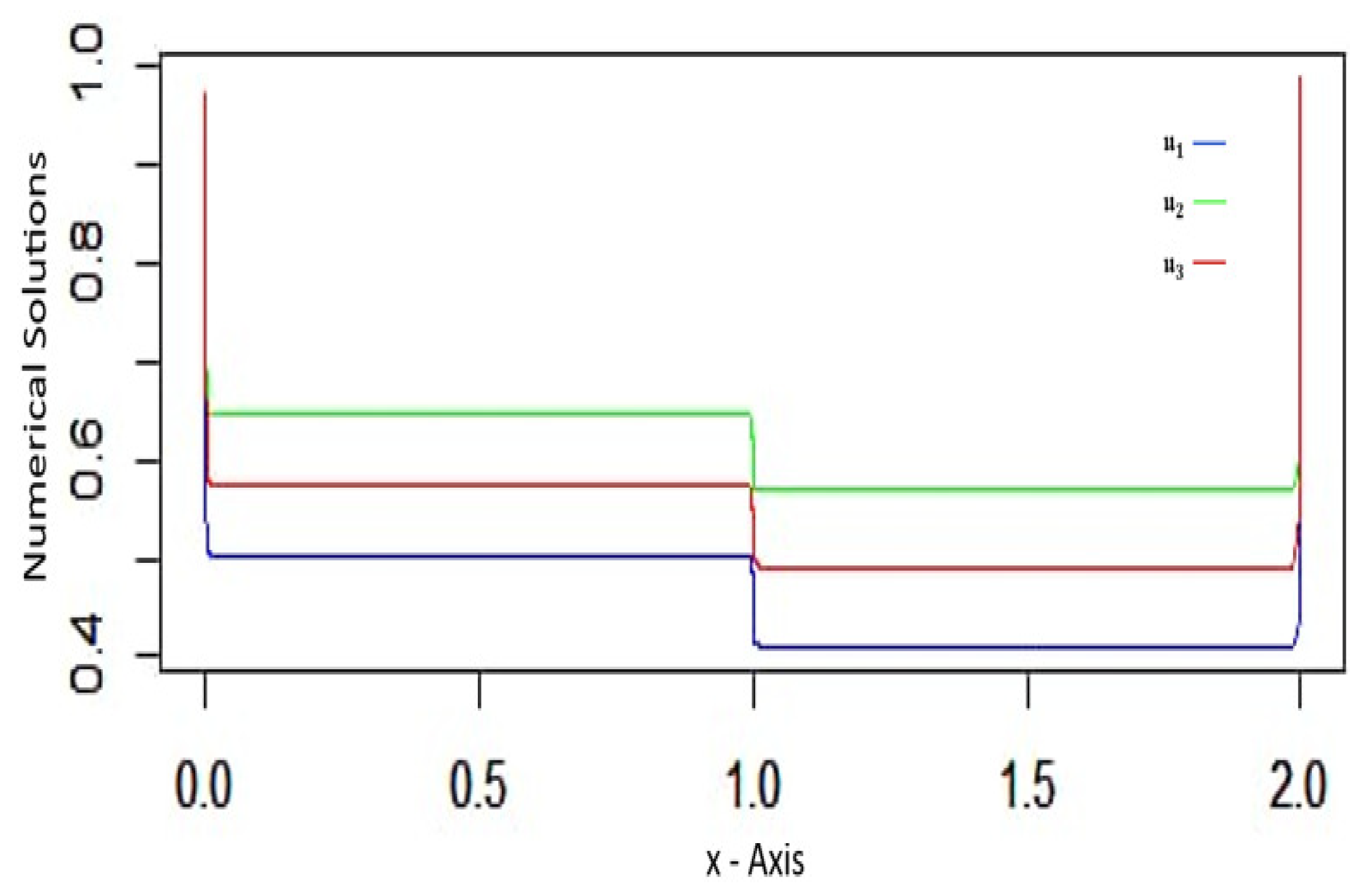
Figure 3.
Graphical representation of maximum pointwise errors for different values for the cases 1 and 2
Figure 3.
Graphical representation of maximum pointwise errors for different values for the cases 1 and 2
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



