Submitted:
16 February 2025
Posted:
18 February 2025
You are already at the latest version
Abstract
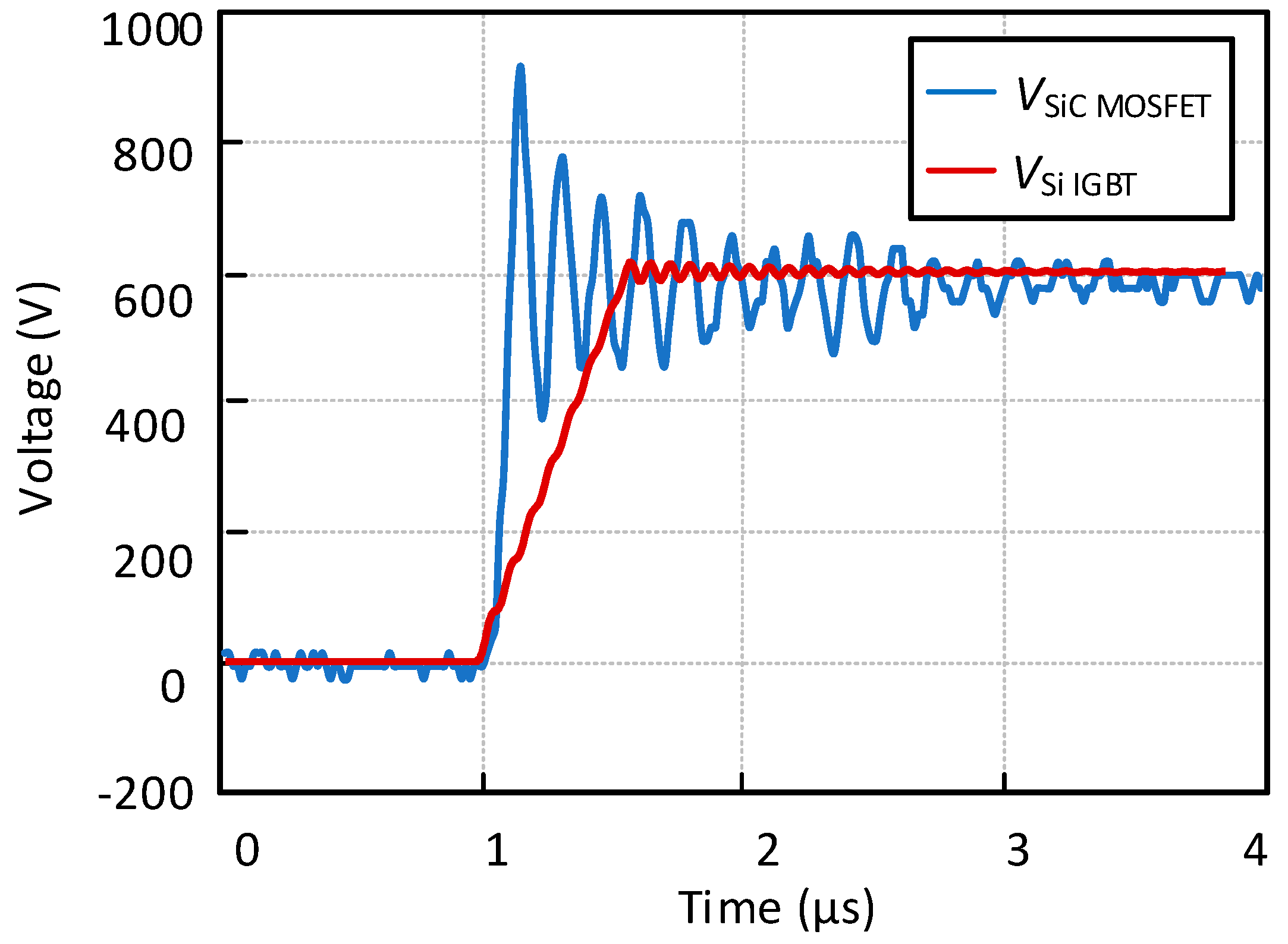
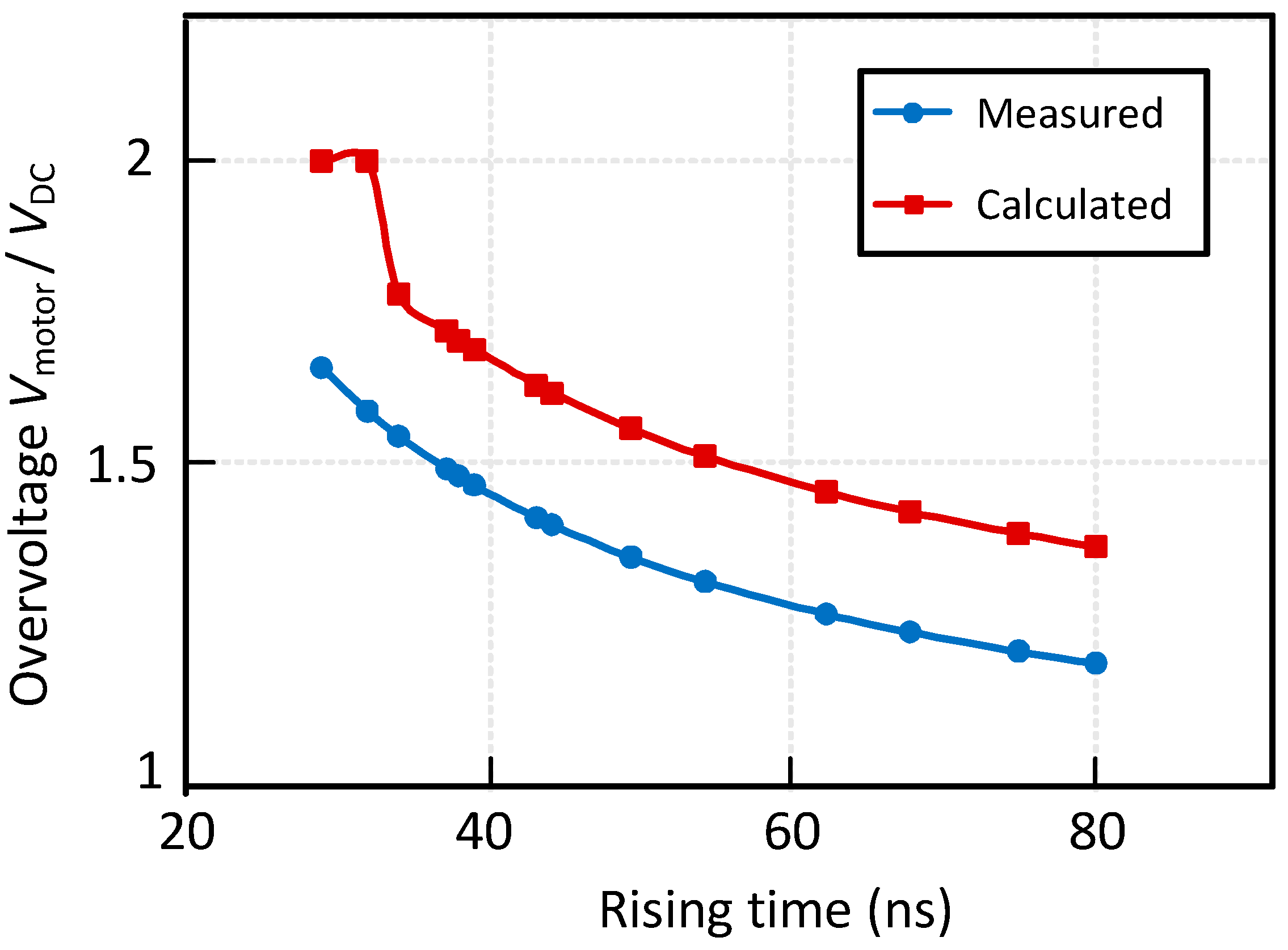
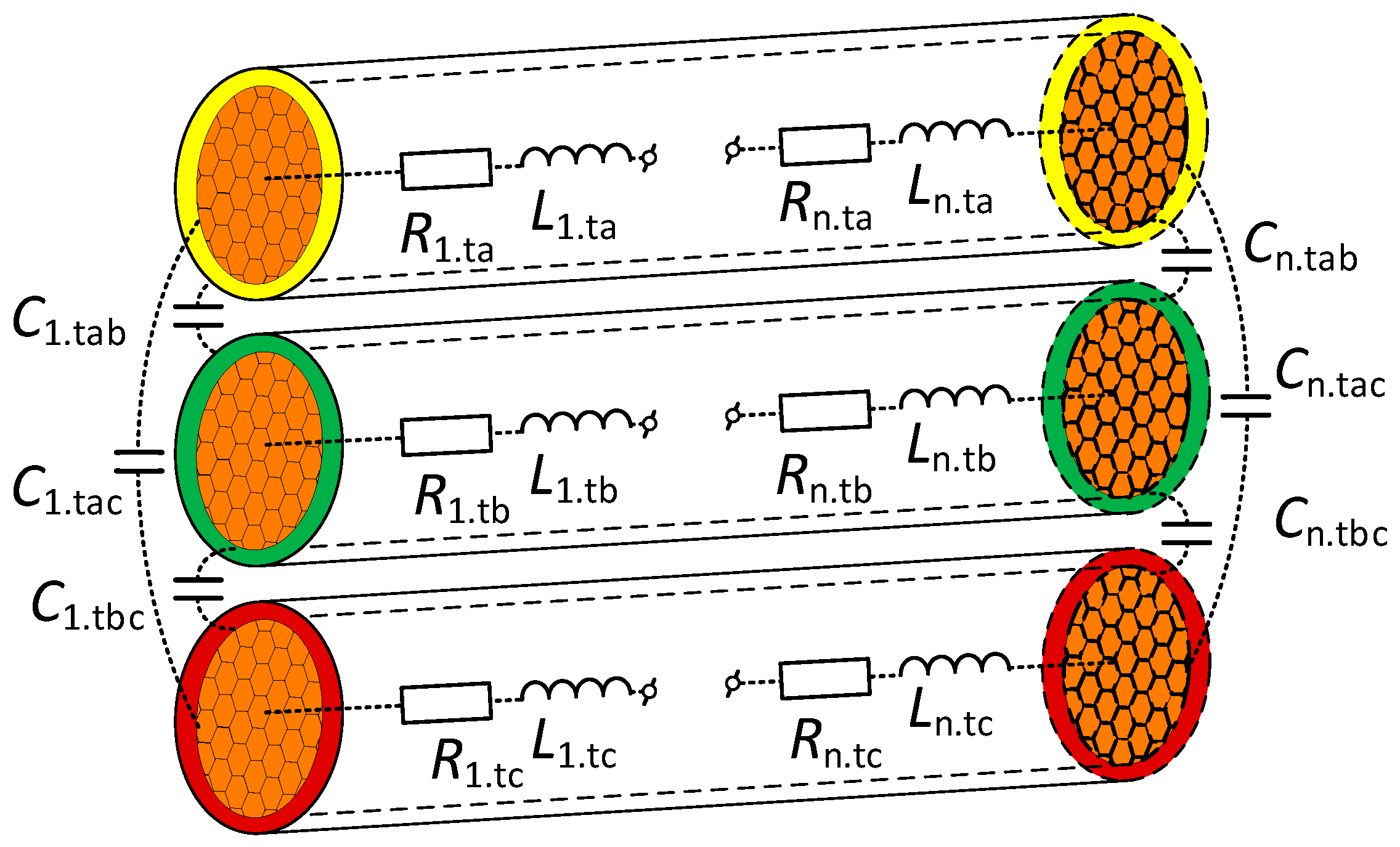
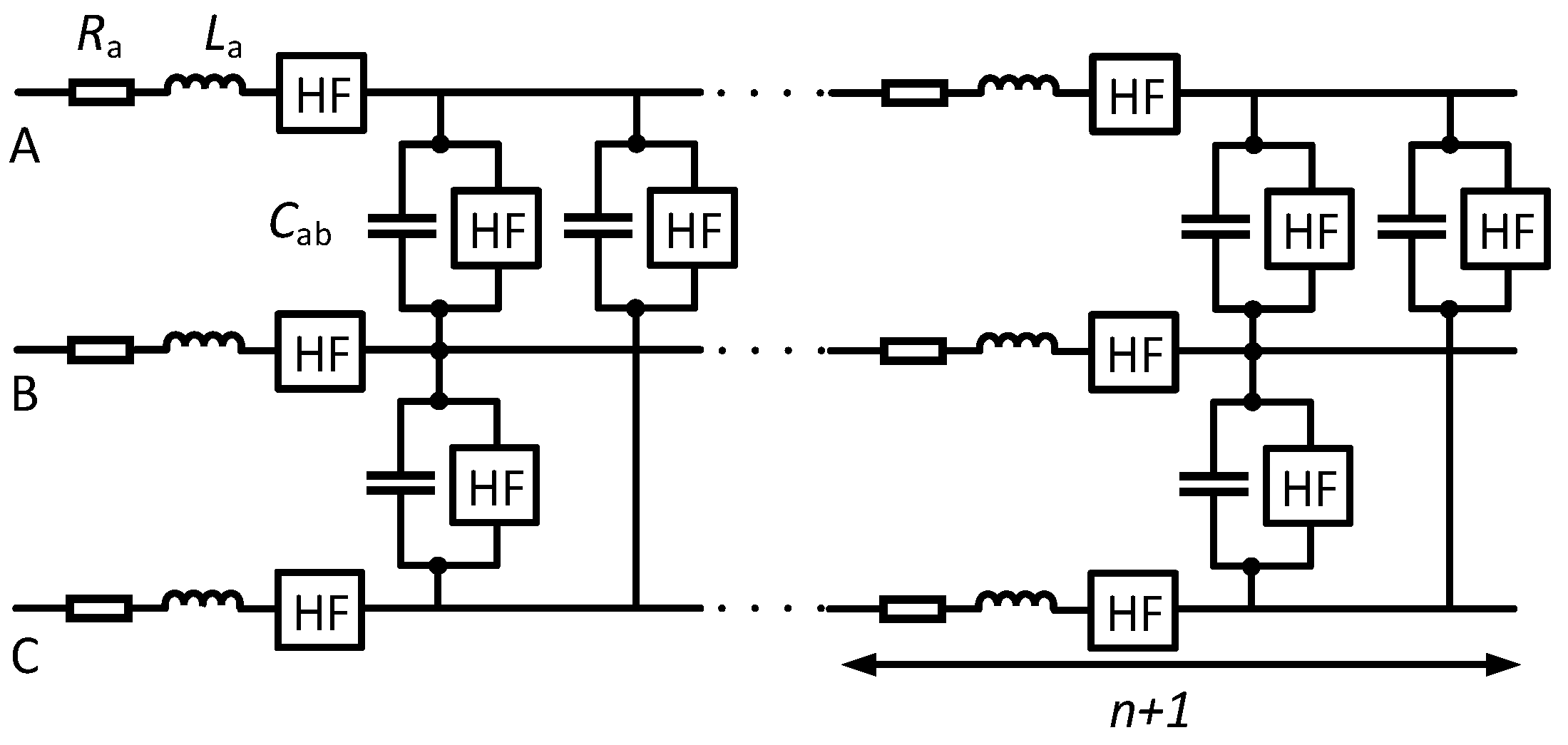
Silicon carbide (SiC) devices are characterized primarily by their high switching frequencies and rapid switching speeds. However, these faster switching speeds result in elevated voltage change rates (dv/dt), which in turn induce overvoltage at motor terminals. This overvoltage phenomenon places significant stress on motor winding insulation and bearings. In order to more accurately predict the overvoltage phenomenon of the inverter-cable-motor systems employing fast-switching SiC devices. This paper proposes a novel high-frequency cable modeling method for SiC drive systems, based on parameter fitting. This model is constructed using cable physical parameters obtained through impedance analyzer measurements. This approach offers advantages over existing high-frequency models, including simplified parameter extraction and accelerated computer simulation times. To validate the model's accuracy, we compare its predicted results against actual experimental measurements. The study further investigates the impact of cable length and voltage rise time on motor overvoltage (SiC system), utilizing both the proposed model and experimental verification. Experimental outcomes demonstrate that our high-frequency distributed parameter cable model accurately predicts motor overvoltage in SiC inverter systems. This research contributes to the analyzing and predicting of overvoltage issues in high-frequency switching environments, improving the reliability and performance of SiC-based motor drive systems.
Keywords:
1. Introduction
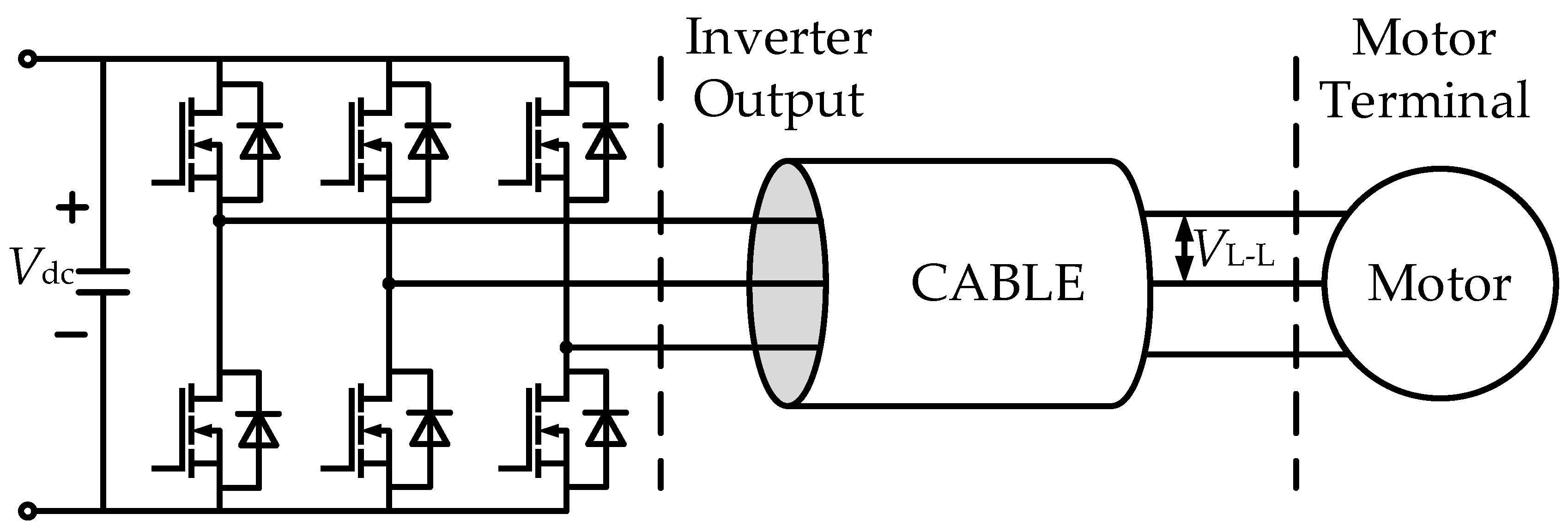
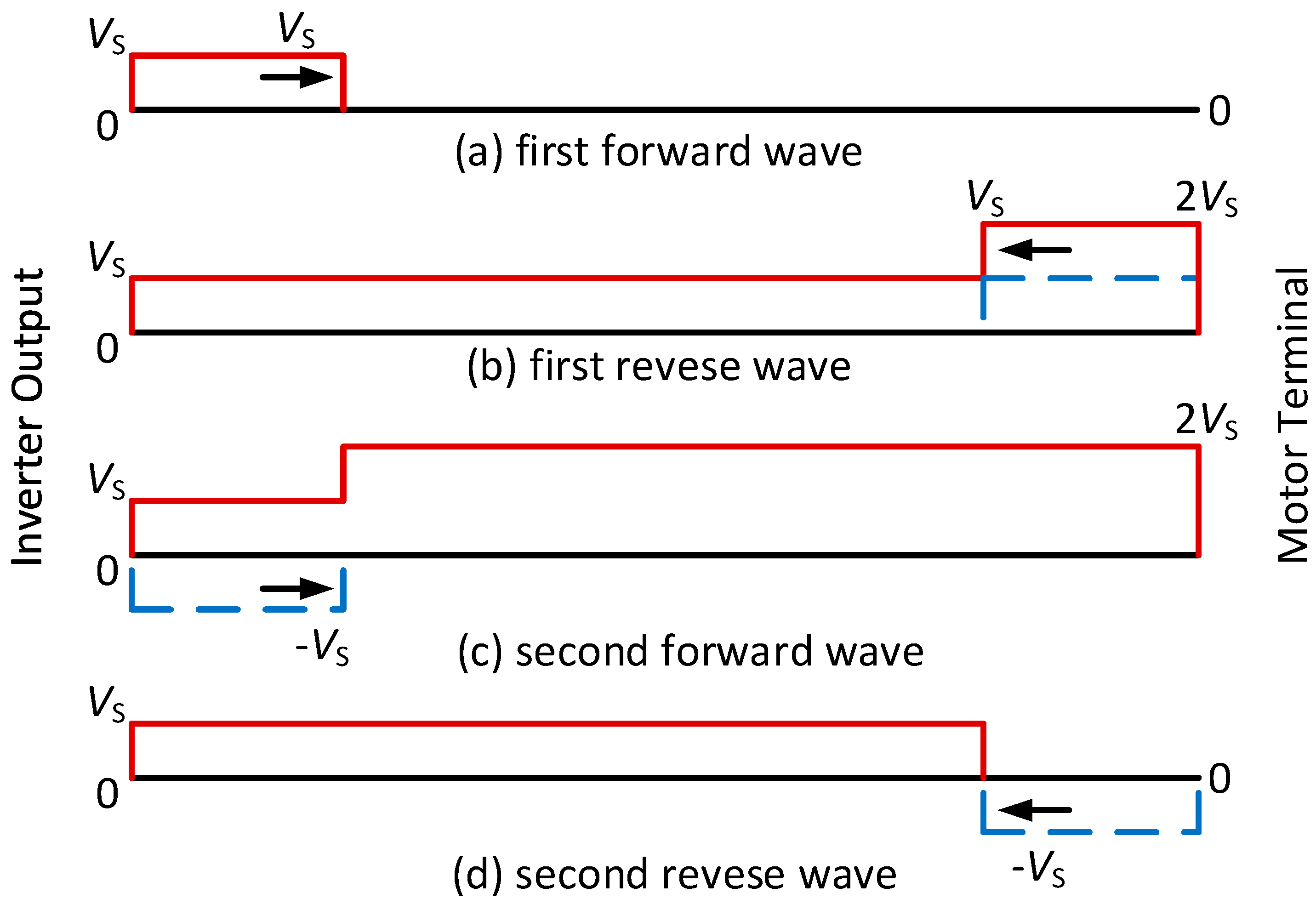
2. Wave Reflection Theory for Overvoltage Prediction
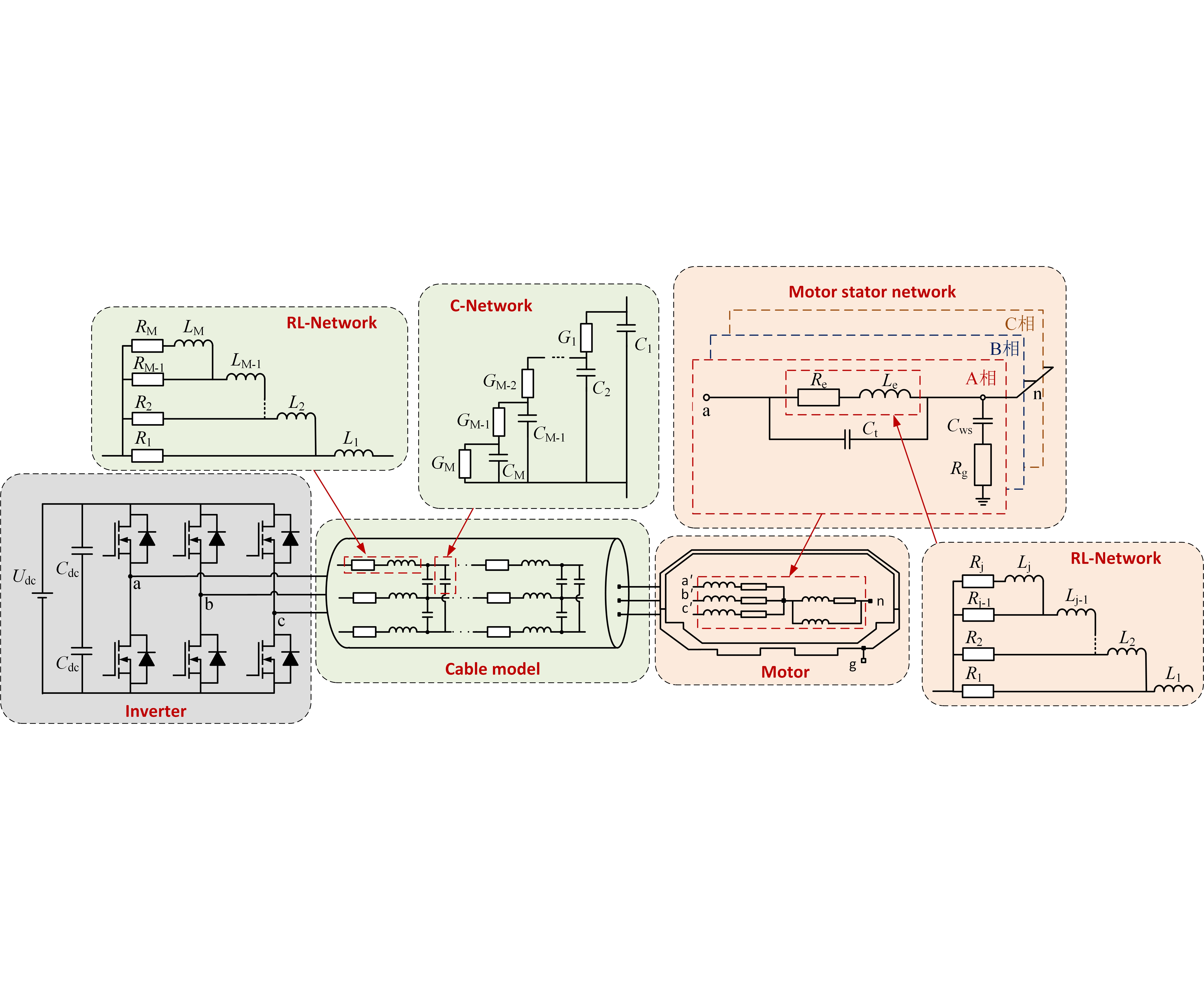
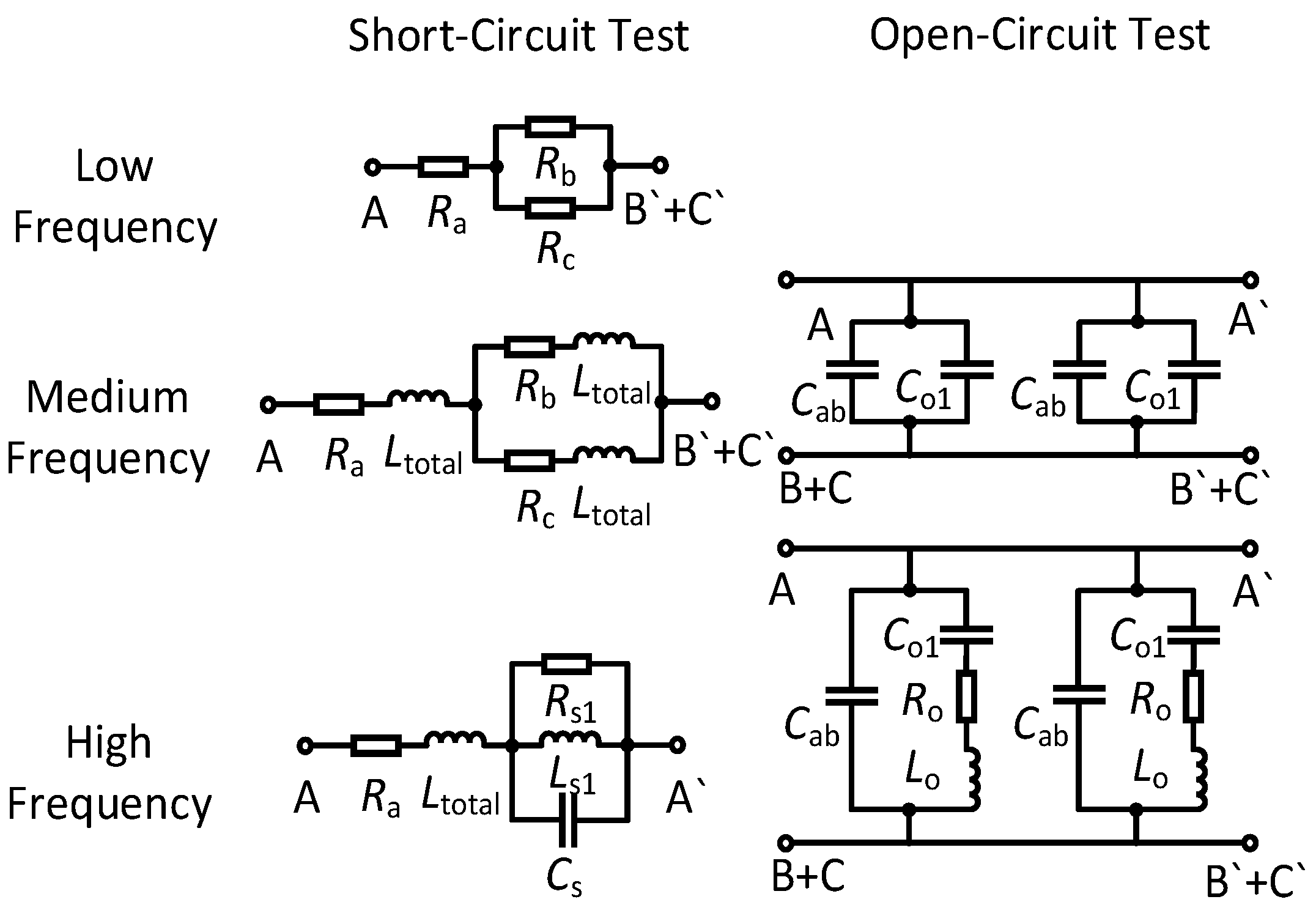
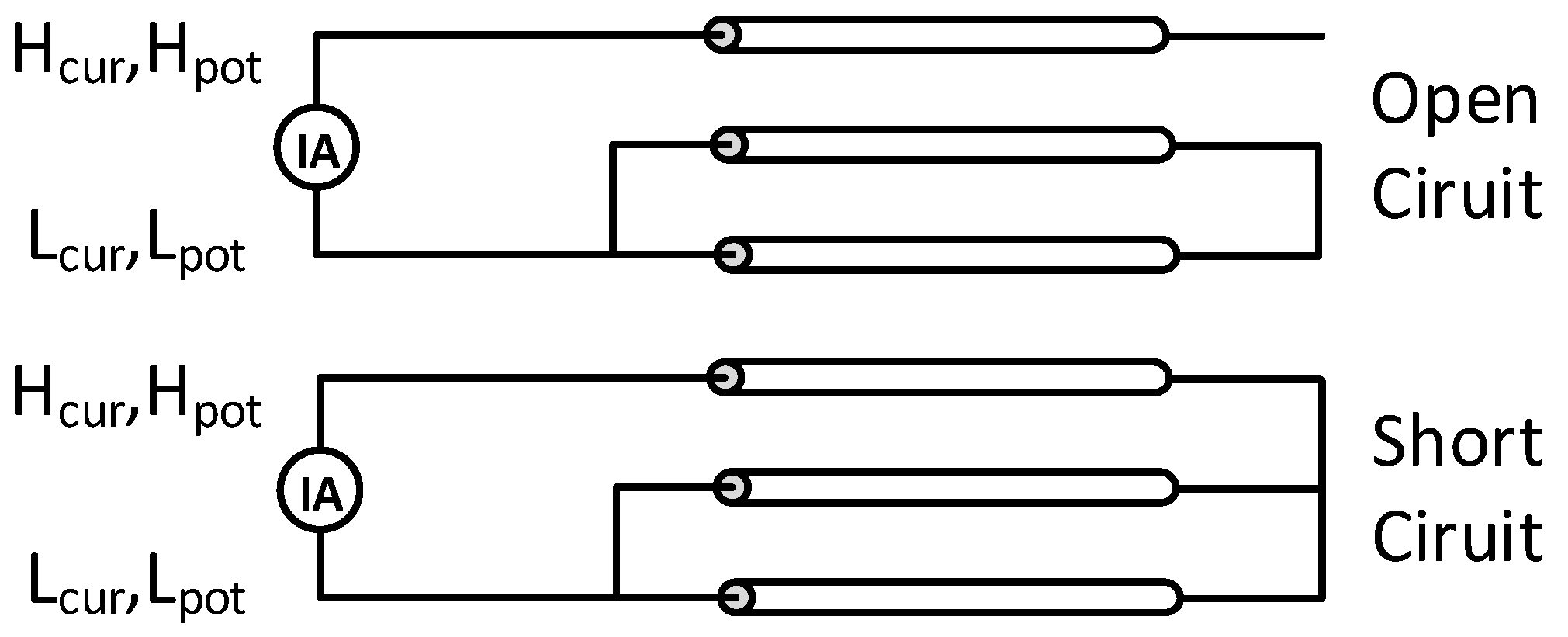
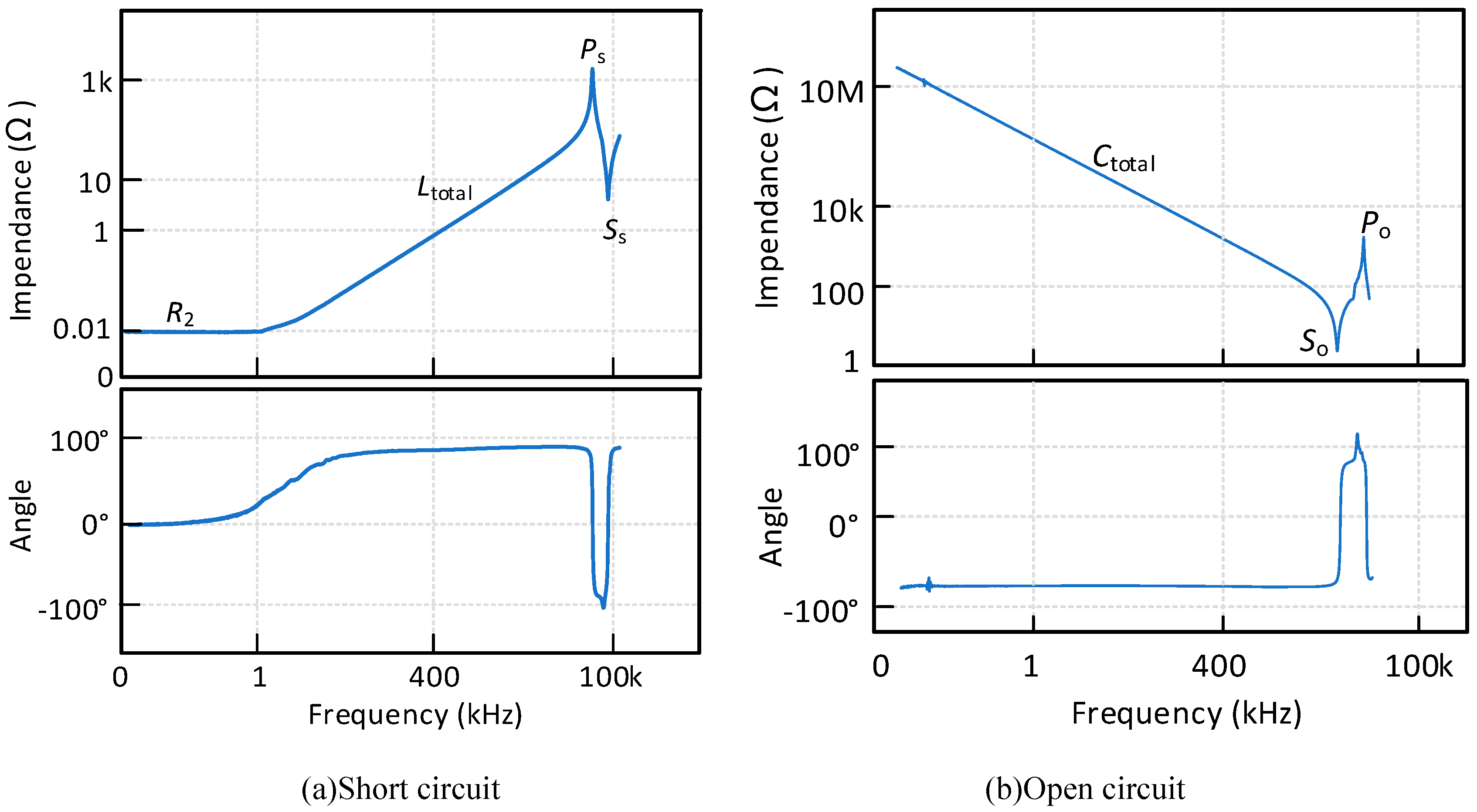
3. High-Frequency Cable Modelling
4. Experimental Results
4.1. Experimental Prototype
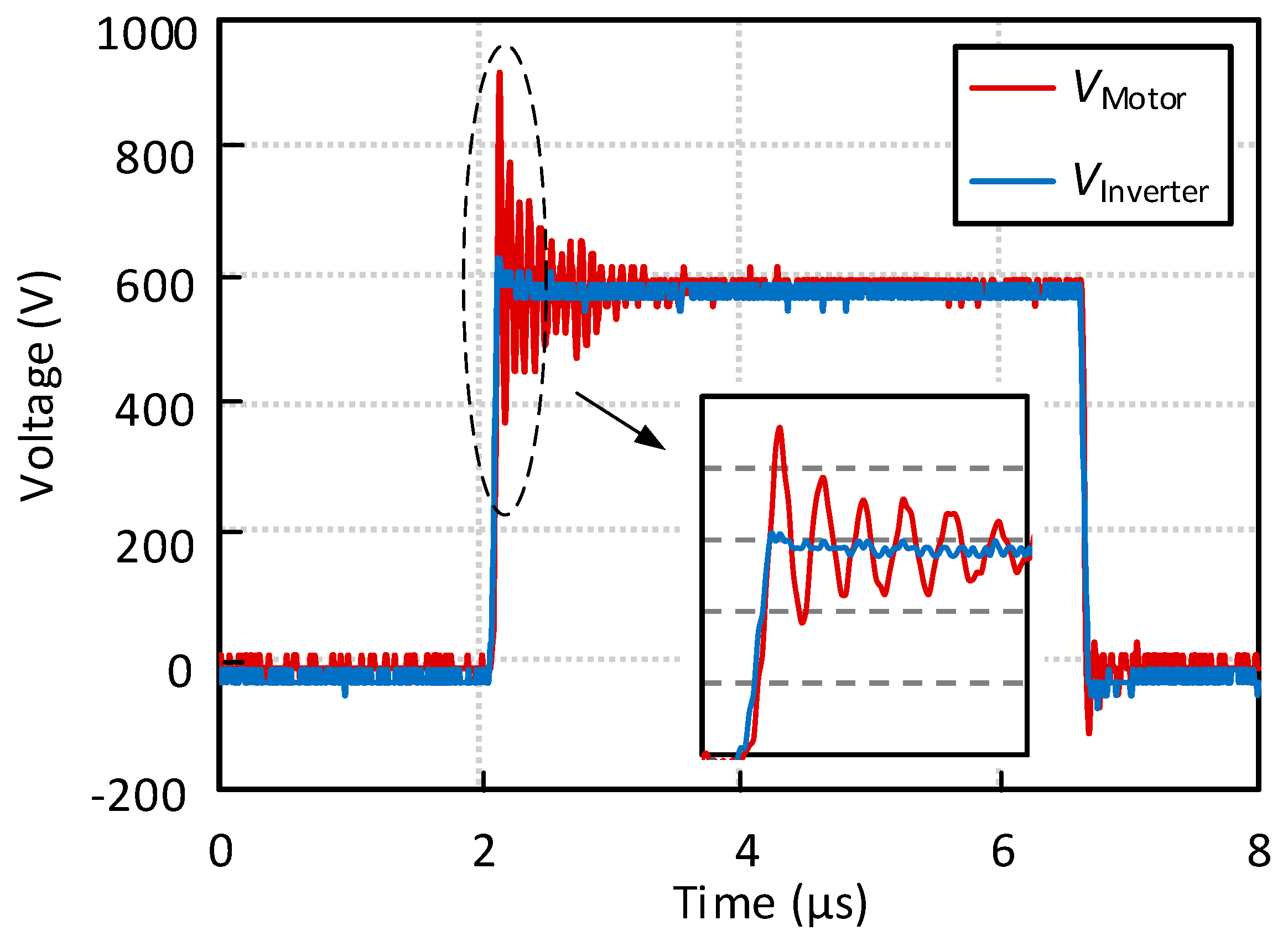
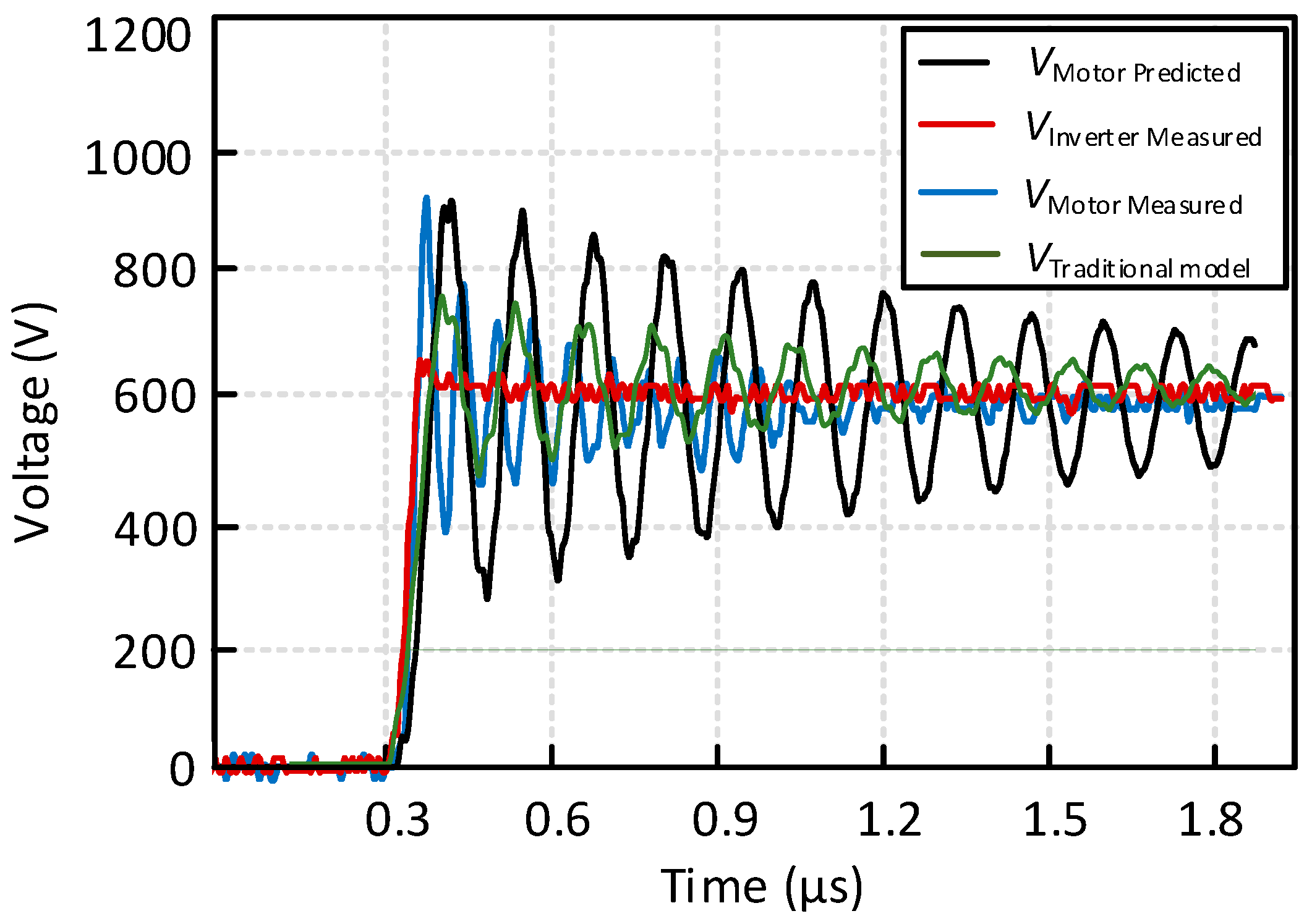
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- P. Yi; P. K. S. Murthy; L. Wei. Performance Evaluation of SiC MOSFETs with Long Power Cable and Induction Motor. In IEEE Energy Conversion Congress and Exposition (ECCE), 2016, pp. 1–7.
- S. Tiwari; O. M. Midtgard; T. M. Undeland. SiC MOSFETs for Future Motor Drive Applications. In 18th European Conference on Power Electronics and Applications (EPE'16 ECCE Europe), 2016, pp. 1–10.
- B. A. Acharya; V. John. Design of output dv/dt filter for motor drives. in 5th International Conference on Industrial and Information Systems, 2010, pp. 562–567.
- M. J. Scott; J. Brockman; B. Hu. Reflected wave phenomenon in motor drive systems using wide bandgap devices. in IEEE Workshop on Wide Bandgap Power Devices and Applications, 2014, pp. 164–168.
- B. Narayanasamy; A. S. Sathyanarayan; Fang Luo. Impact of Cable and Motor Loads on Wide Bandgap Device Switching and Reflected Wave Phenomenonin Motor Drives. in 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), 2017, pp. 931–937.
- Motors and Generators. NEMA Standards Publication No. MG1-1993, Revision No. 2, Apr. 1995.
- Hazra, S.; De, A.; Cheng, L. High Switching Performance of 1700-V, 50-A SiC Power MOSFET Over Si IGBT/BiMOSFET for Advanced Power Conversion Applications. IEEE Transactions on Power Electronics 2016, 31, 4742–4754. [Google Scholar]
- A. Morya; H. A. Toliyat. Insulation Design for Wide Bandgap (WBG) Device Based Voltage Source Converter Fed Motors. in 2017 IEEE 5th Workshop on Wide Bandgap Power Devices and Applications (WiPDA), 2017, pp. 74–79.
- Suresh, G.; Dudi, A.; Rendusara; Toliyat, H. A. Predicting the Transient Effects of PWM Voltage Waveform on the Stator Windings of Random Wound Induction Motors. IEEE Transactions on Power Electronics 1999, 14, 23–30. [Google Scholar] [CrossRef]
- Kerkman, R.J.; Leggate, D.; Skibinski, G.L. Interaction of Drive Modulation and Cable Parameters on AC Motor Transients. IEEE Transactions on Industry Applications 1997, 33, 722–731. [Google Scholar] [CrossRef]
- M. J. Scott; J. Brockman; B. Hu. Reflected wave phenomenon in motor drive systems using wide bandgap devices. in IEEE Workshop on Wide Bandgap Power Devices and Applications, 2014, pp. 164–168.
- S. N. M. Isa; Z. Ibrahim; M. Azri. Vector controlled AC motor drives for long cable application: Analysis of harmonics at motor terminal. in 4th IET Clean Energy and Technology Conference (CEAT 2016), 2016, pp. 1–8.
- Peizhong Yi; P. Murthy; Lixiang Wei. Performance evaluation of SiC MOSFETs with long power cable and induction motor. in IEEE Energy Conversion Congress and Exposition, Proceedings (ECCE 2016), 2016.
- Moreira, A.F.; Lipo, T.A.; Venkataramanan, G.; Bernet, S. High-frequency modeling for cable and induction motor overvoltage studies in long cable drives. IEEE Transactions on Industry Applications 2002, 38, 1297–1306. [Google Scholar] [CrossRef]
- G. Skibinski; R. Tallam; R. Reese. Common-mode and differential-mode analysis of three phase cables for PWM AC drives. in Conference Record of the 2006 IEEE Industry Applications Conference Forty-First IAS Annual Meeting, 2006, pp. 880–888.
- Krause, P.C.; Carlsen, K. Analysis and hybrid computer simulation of multiconductor transmission systems. IEEE Transactions on Power Apparatus and Systems, 1972; PAS-91, 469–477. [Google Scholar]
- Aoki, N.; Satoh, K.; Nabae, A. Damping circuit to suppress motor terminal overvoltage and ringing in PWM inverter-fed AC motor drive systems with long cable leads. IEEE Transactions on Industry Applications 1999, 35, 1014–1020. [Google Scholar] [CrossRef]
- von Jouanne, A.; Rendusara, D.A.; Enjeti, P.N.; Gray, J.W. Filtering techniques to minimize the effect of long motor leads on PWM inverter- fed AC motor drive systems. IEEE Transactions on Industry Applications 1996, 32, 919–926. [Google Scholar] [CrossRef]
- G. Tongkhundam. Over-voltages suppression methods in multiple drives using single half DC-link inverter for long cable applications. in 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), 2015, pp. 713–718.
- G. Skibinski; D. Leggate; R. Kerkman. Cable characteristics and their influence on motor overvoltages. in Proceedings of APEC 97 - Applied Power Electronics Conference, 1997, pp. 114–121.
- Paula, H.D.; Andrade, D.A.; Chaves, M.L.R. Methodology for Cable Modeling and Simulation for High-Frequency Phenomena Studies in PWM Motor Drives. IEEE Transactions on Power Electronics 2008, 23, 744–752. [Google Scholar] [CrossRef]
- Wang, L.; Ho, C.N.-M.; Canales, F.; Jatskevich, J. High-frequency modeling of the long-cable-fed induction motor drive system using TLM approach for predicting overvoltage transients. IEEE Transactions on Power Electronics 2010, 25, 2653–2664. [Google Scholar] [CrossRef]
- von Jouanne, A.; Enjeti, P.; Gray, W. Application issues for PWM adjustable speed AC motor driver. IEEE Industry Applications Magazine 1996, 2, 10–18. [Google Scholar] [CrossRef]
- Melhorn, C.J.; Tang, L. Transient Effects of PWM Drives on Induction Motors. IEEE Transactions on Industry Applications 1995, 33, 1065–1072. [Google Scholar] [CrossRef]
- Kerkman, R.J.; Leggate, D.; Skibinski, G.L. Interaction of Drive Modulation and Cable Parameters on AC Motor Transients. IEEE Transactions on Industry Applications 1997, 33, 722–731. [Google Scholar] [CrossRef]
- A. von Jouanne; P. Enjeti. Design considerations for an inverter output filter to mitigate the effects of long motor leads in ASD applications. in Proceedings of Applied Power Electronics Conference. APEC '96, 1996, pp. 579–585.
- Xu, Y.; Yuan, X.; Ye, F.; Wang, Z.; Zhang, Y.; Diab, M.; Zhou, W. Impact of high switching speed and high switching frequency of wide-bandgap motor drives on electric machines. IEEE Access 2021, 9, 82866–82880. [Google Scholar] [CrossRef]


| Rise time of voltage pulse | Critical cable length |
|---|---|
| 20 ns | 0.92 m |
| 30 ns | 1.38 m |
| 40 ns | 1.84 m |
| 50 ns | 2.30 m |
| 60 ns | 2.76 m |
| 70 ns | 3.22 m |
| 80 ns | 3.68 m |
| 90 ns | 4.13 m |
| 100 ns | 4.59 m |
| 200 ns | 9.20 m |
| 300 ns | 13.8 m |
| 400 ns | 18.4 m |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Ra,b,c | 5.71 mΩ | Cab,ac,bc | 9.79 pF |
| Ltotal | 174 nH | Ro | 4.1 Ω |
| Cs | 33.92 pF | Lo | 316.7 nH |
| Rs1 | 1.33 kΩ | Co1 | 46.15 pF |
| Ls1 | 260.43 nH |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



