Submitted:
06 February 2025
Posted:
06 February 2025
You are already at the latest version
Abstract
This study introduces an enhanced Forest PSO-GA algorithm for forest fire monitoring, integrating Particle Swarm Optimization (PSO), Genetic Algorithm (GA), and forest wind dynamics, while considering the impact of terrain variations on energy con-sumption, into an adaptive search framework. By incorporating wind-driven fire propagation and smoke diffusion models into a cellular automata simulation platform, the algorithm effectively evaluates its performance and further accounts for elevation and energy consumption. This enables more accurate simulation of fire and smoke spread, ensuring efficiency and sustainability in remote forest areas. Simulations using data from the Harbin Liangshui Forest show that the enhanced Forest PSO-GA out-performs APSO, AFSA, and PSO-PID in search speed by 91.34%, 340.89%, and 52.21%, respectively. It achieves an average localization accuracy of 9 meters (±1.2 meters), which is sufficient for the precise deployment of fire-extinguishing devices. The algo-rithm also reduces the search area by 35.4-72.3% and converges within 50 iterations 80% of the time, representing a 28.7% efficiency gain over PSO-PID. Additionally, the algo-rithm boasts a success rate of 94.3% and a 61.8% improvement in wind resistance, ef-fectively supporting pre-disaster warnings and early fire detection. These advance-ments significantly enhance fire detection accuracy, reduce the burden on forest fire prevention efforts, and improve precision firefighting and ecological recovery capabil-ities, offering a highly efficient and reliable solution for forest fire management.
Keywords:
1. Introduction
1.1. Background and Importance of Research on This Topic
1.2. Research Status
1.2.1. Forest Fire Spread Modeling
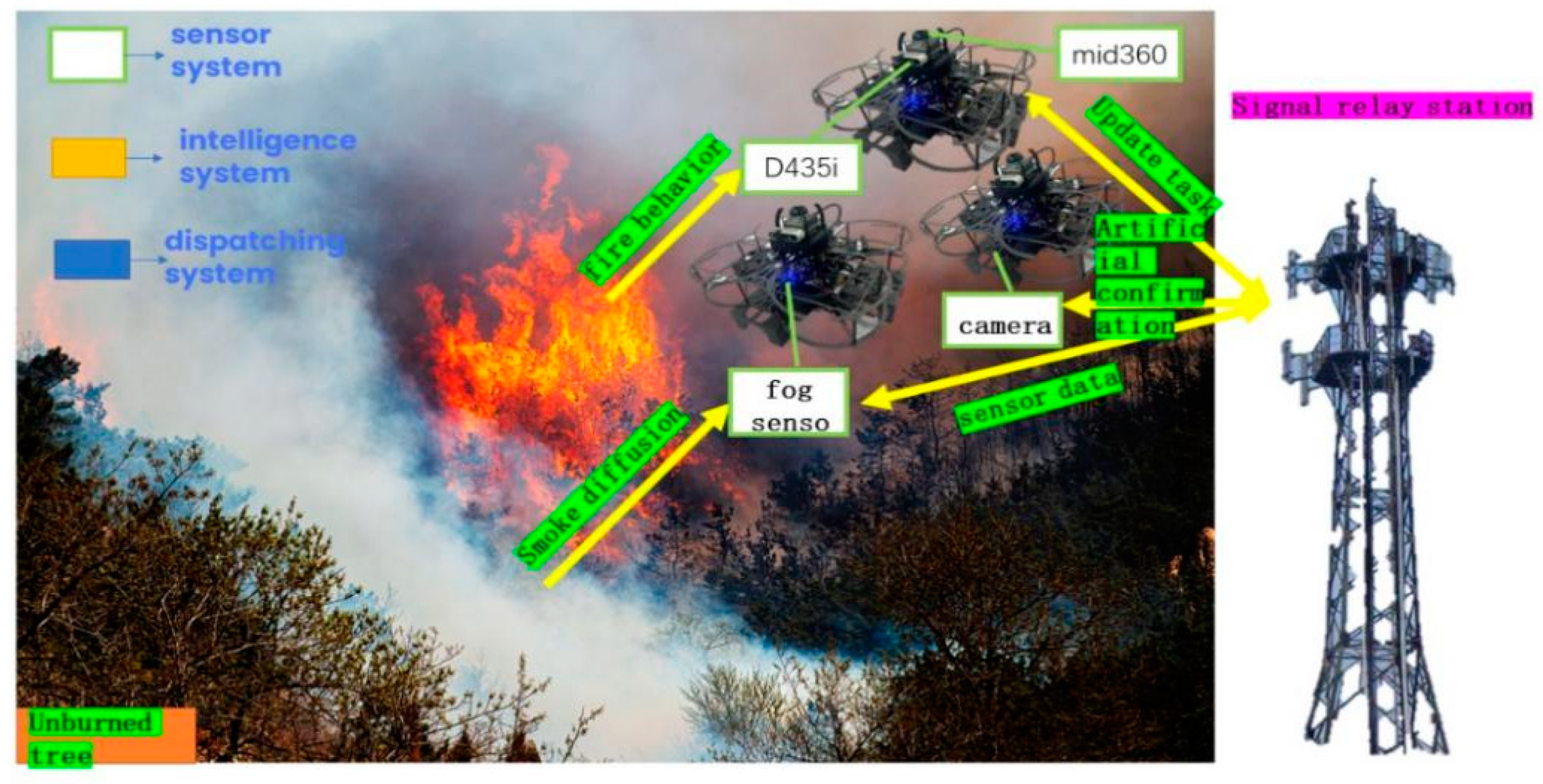
1.2.2. UAV Cluster Target Search System
1.3. Research Topic and Contributes
1.3.1. Research Topic
2. Experimental Environment Setup
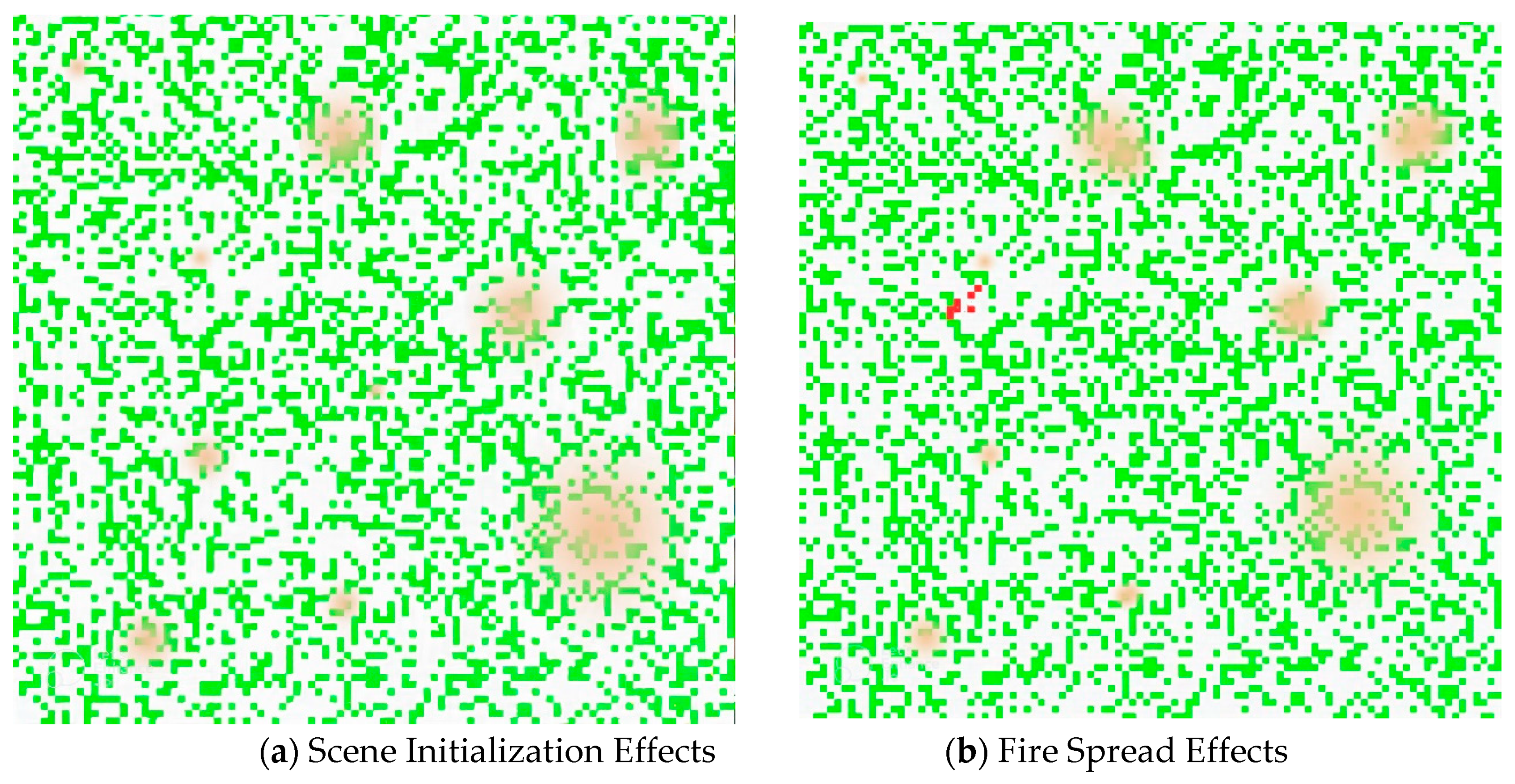
2.1. Improved Metacellular Automata Model of Fire Spreading
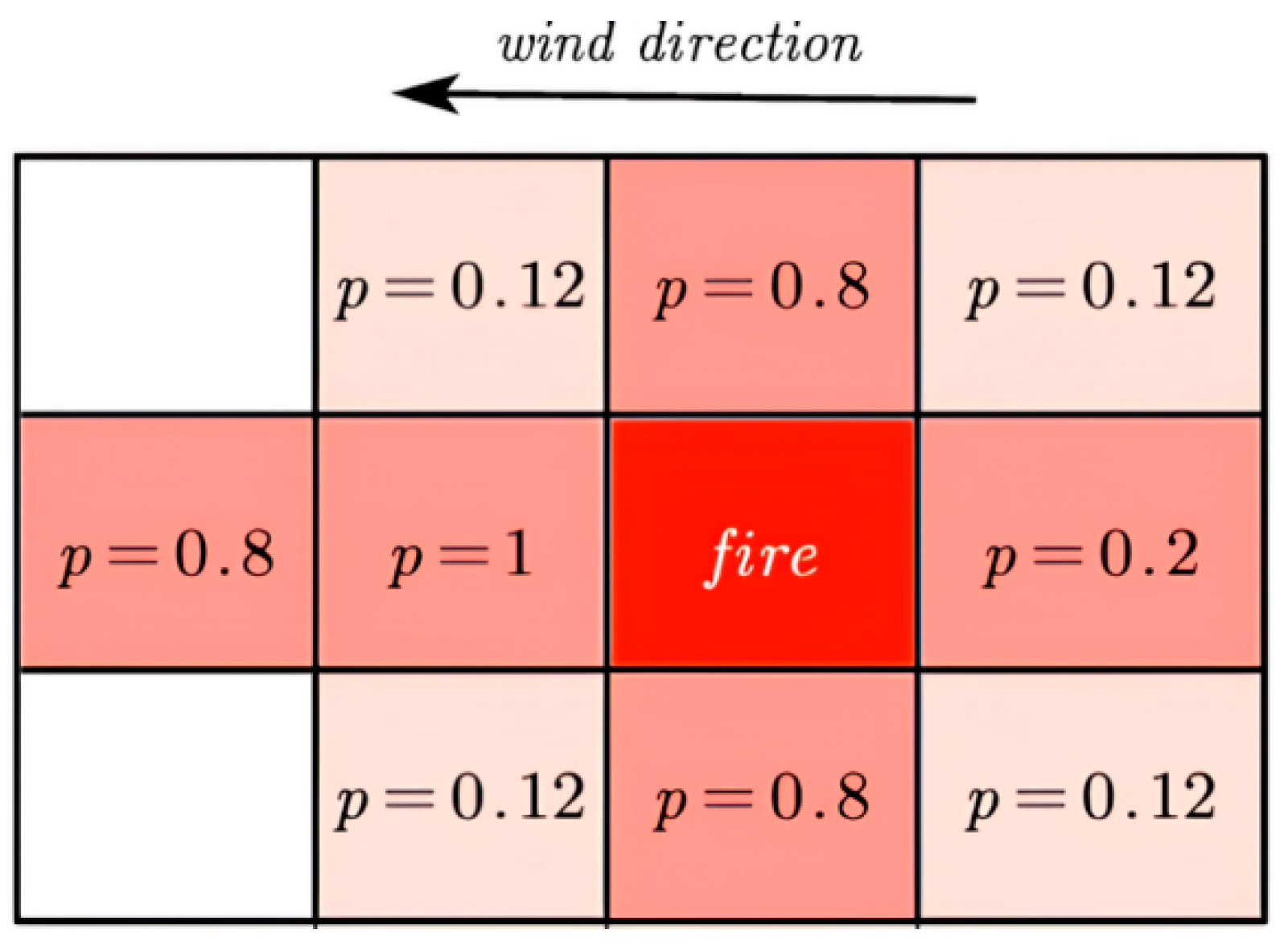
2.1.1. Fire Spread Probability Formula Update
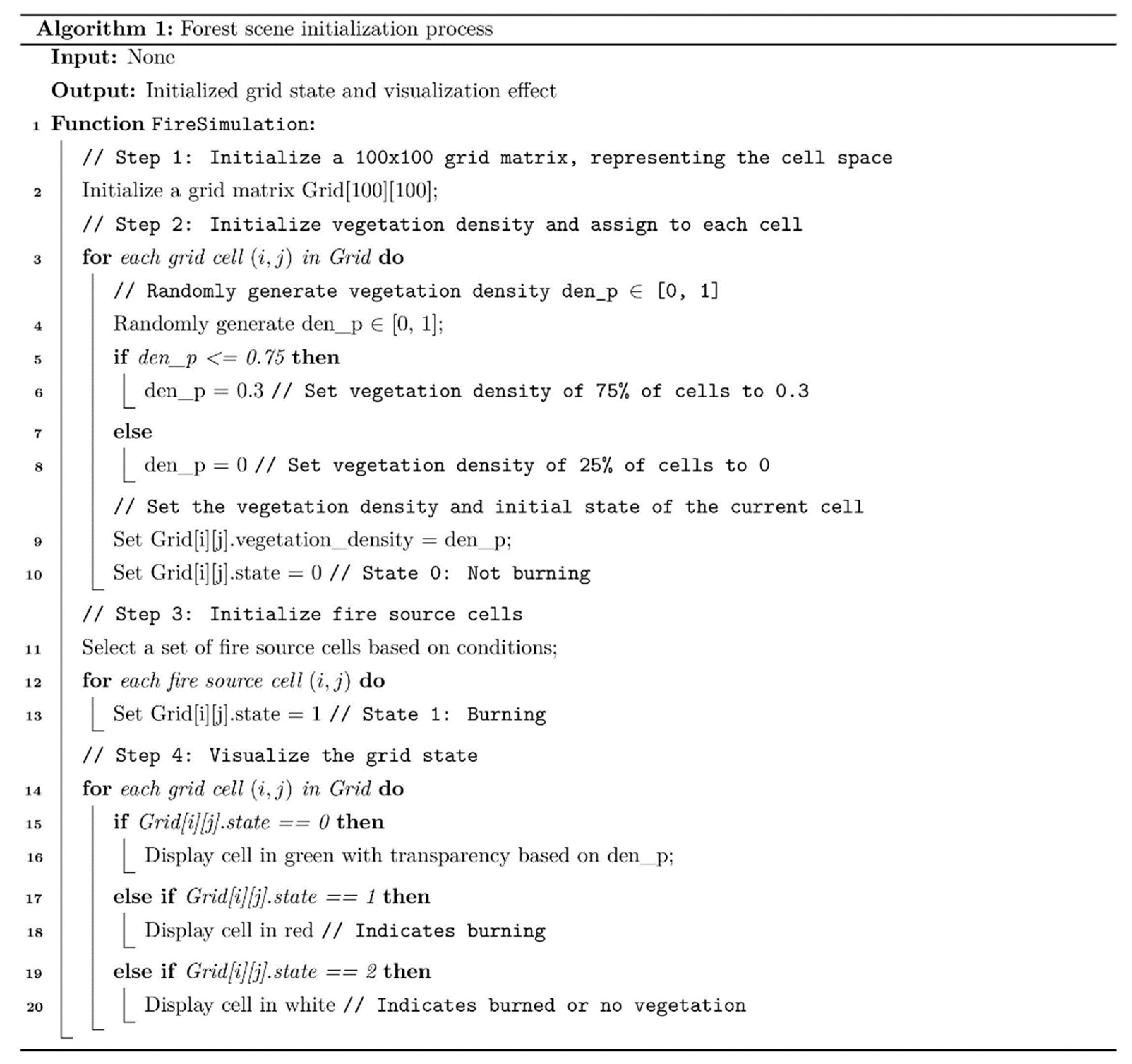
2.2. Simulation of Fire Spread Model with Modified Metacellular Automata
3. Design of Target Signal Detection Function
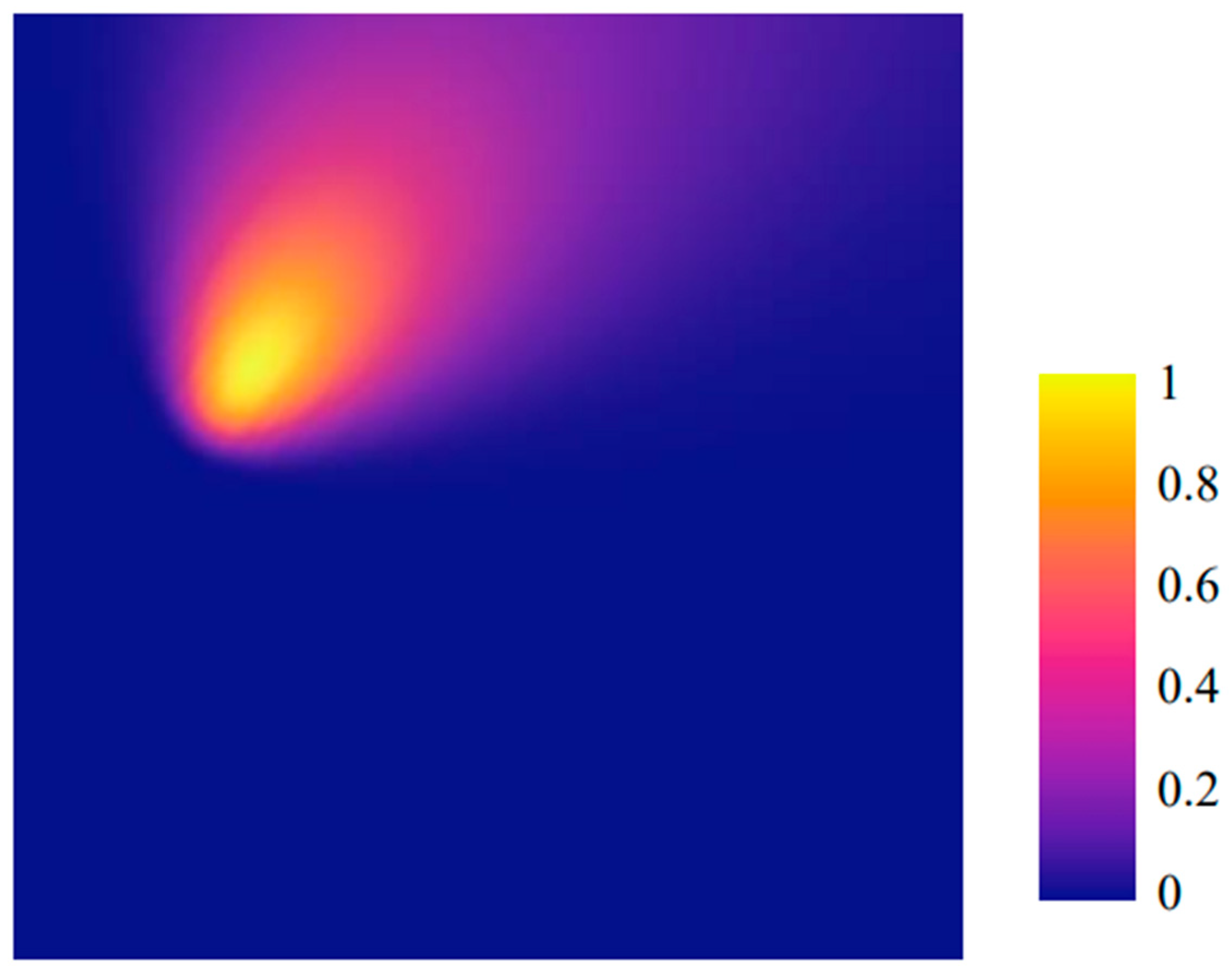
3.1. Smoke Concentration Signal and Target Signal Detection Function
3.2. Target Signal Detection Function
4. Search Algorithms
4.1. Optimized Particle Swarm Optimization Algorithm
4.1.1. Consider the Impact of Energy Consumption
4.1.2. Inertia Weight Reduction
4.2. Particle Swarm Optimization Algorithm Fusion Improvement Program
4.2.1. Consider the Forest Wind Characteristics of the Topography
4.2.2. Introduction of Genetic Algorithm

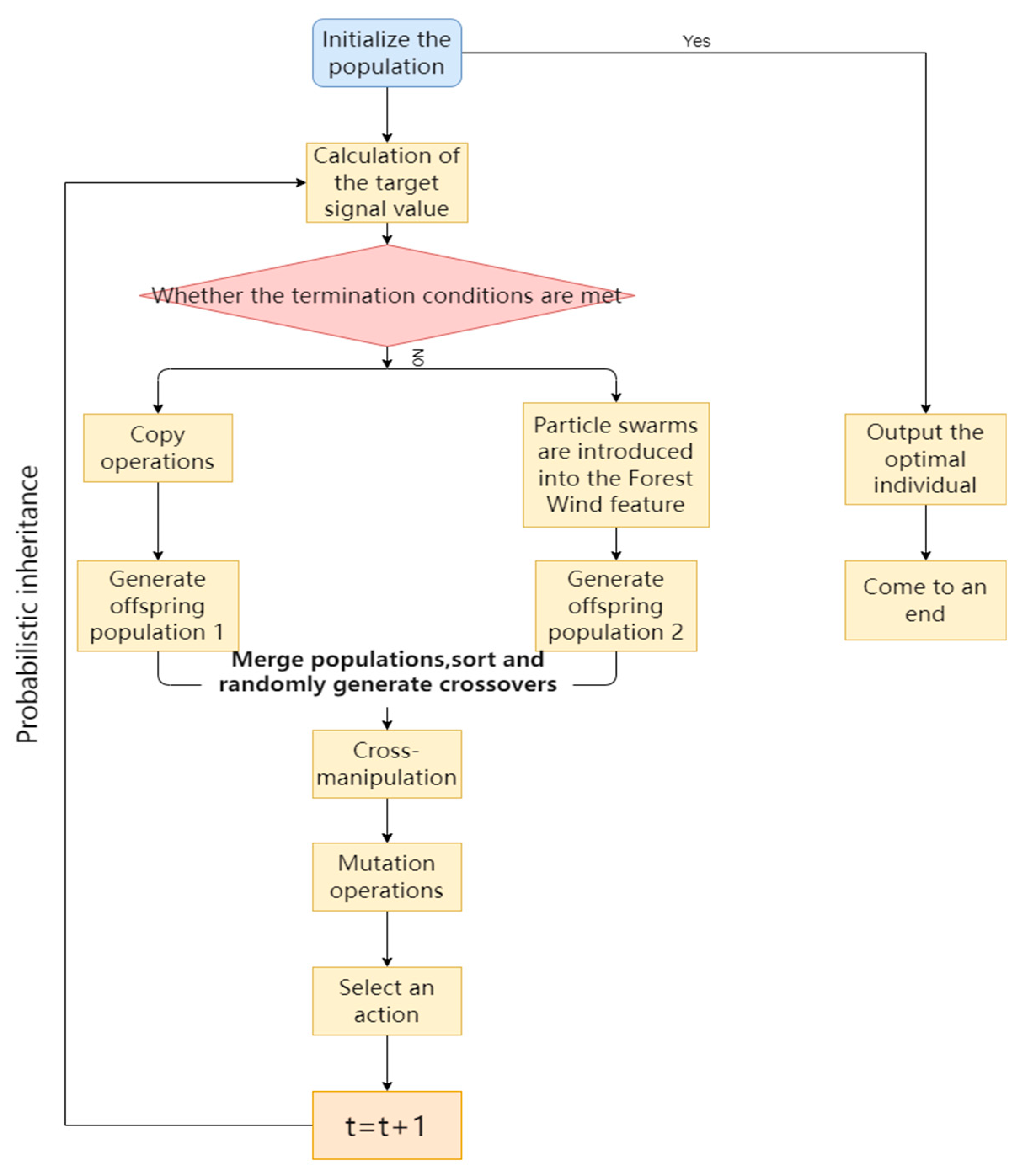
4.3. Implementation of Forest PSO-GA
5. Experimental
5.1. Experimental Preparation
5.2. Search Efficiency and Stability Analysis of Forest PSO-GA
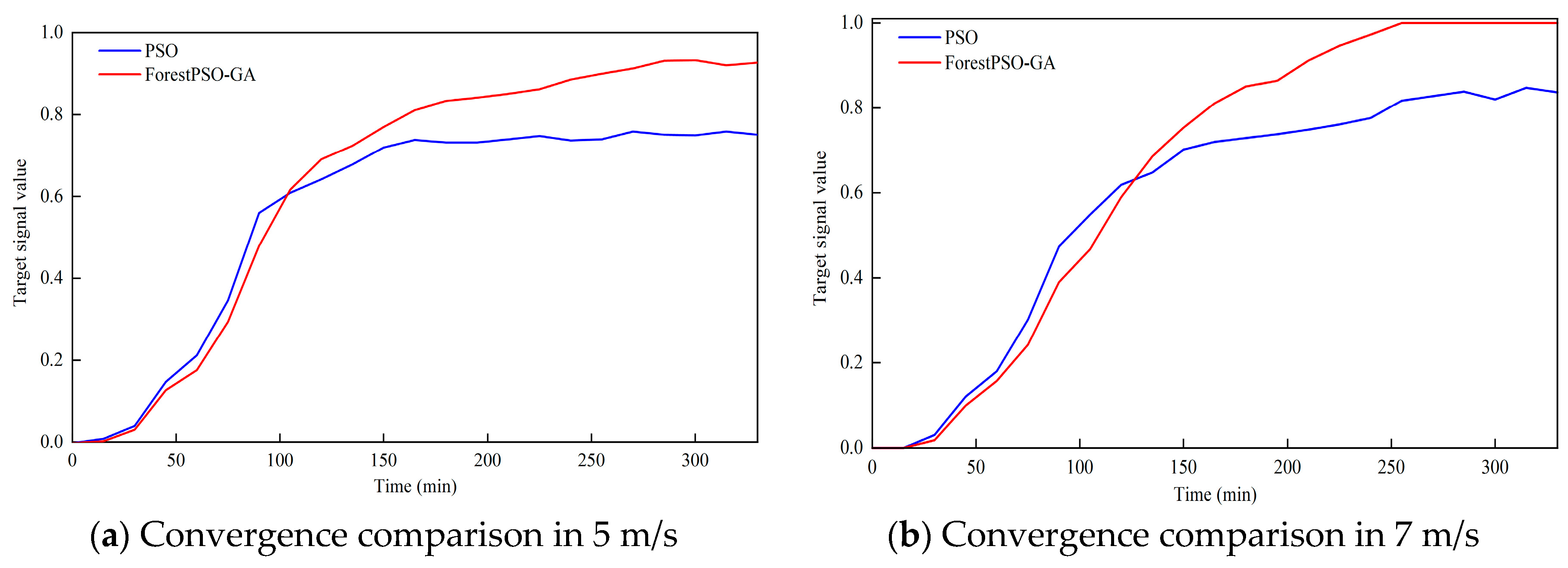
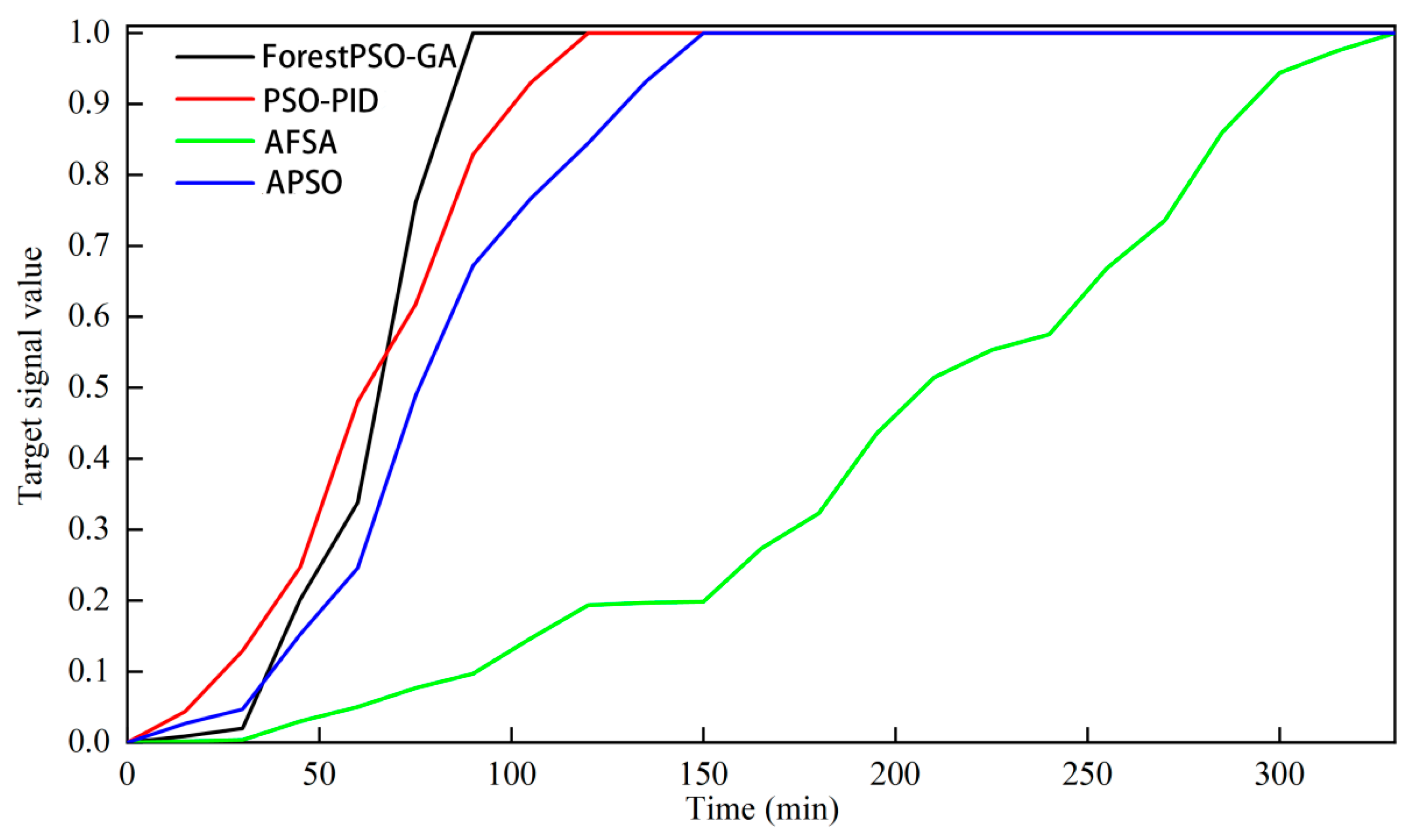
5.3. Comparison of Convergence Characteristics
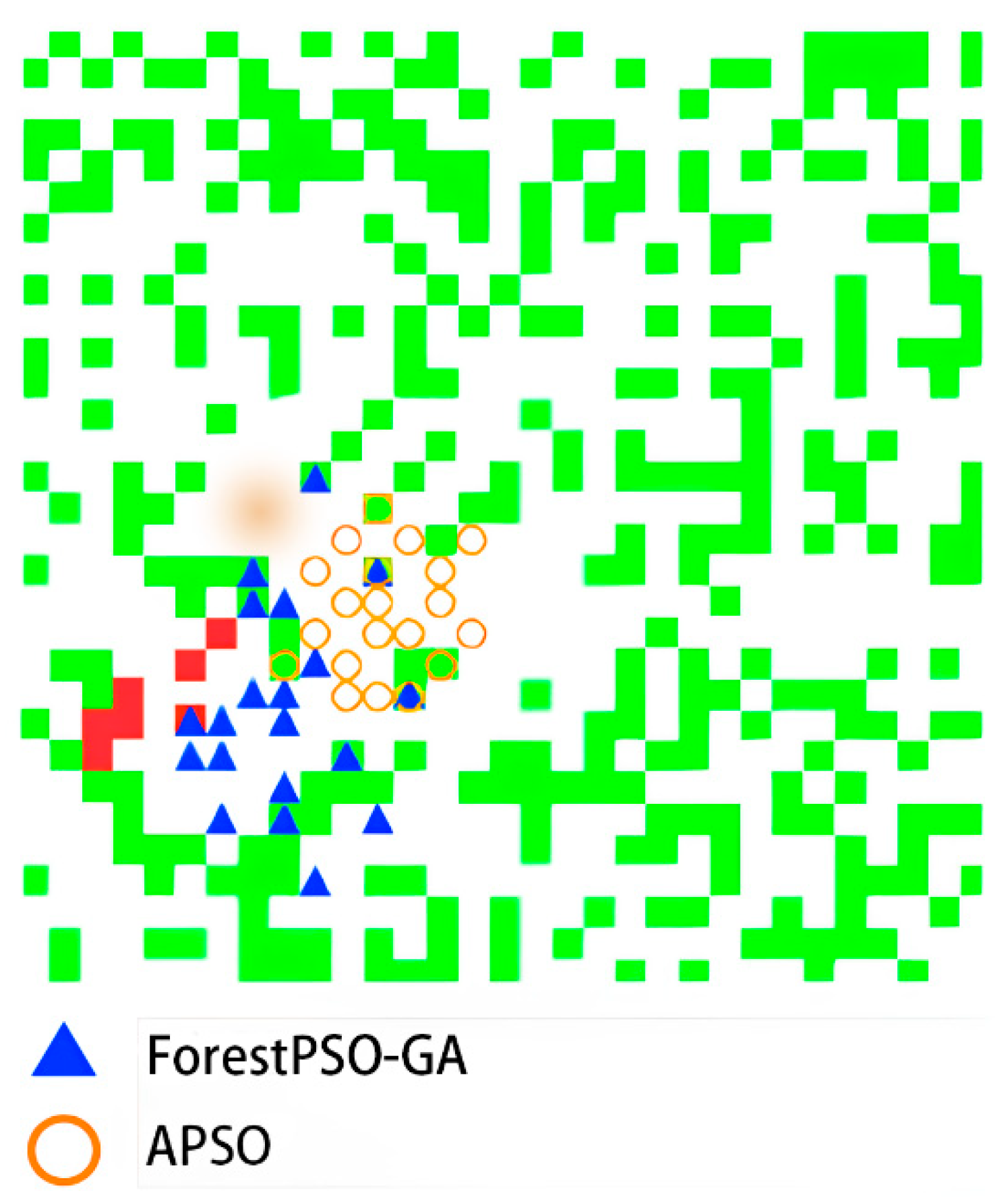
5.4. Accuracy Analysis of Forest PSO-GA
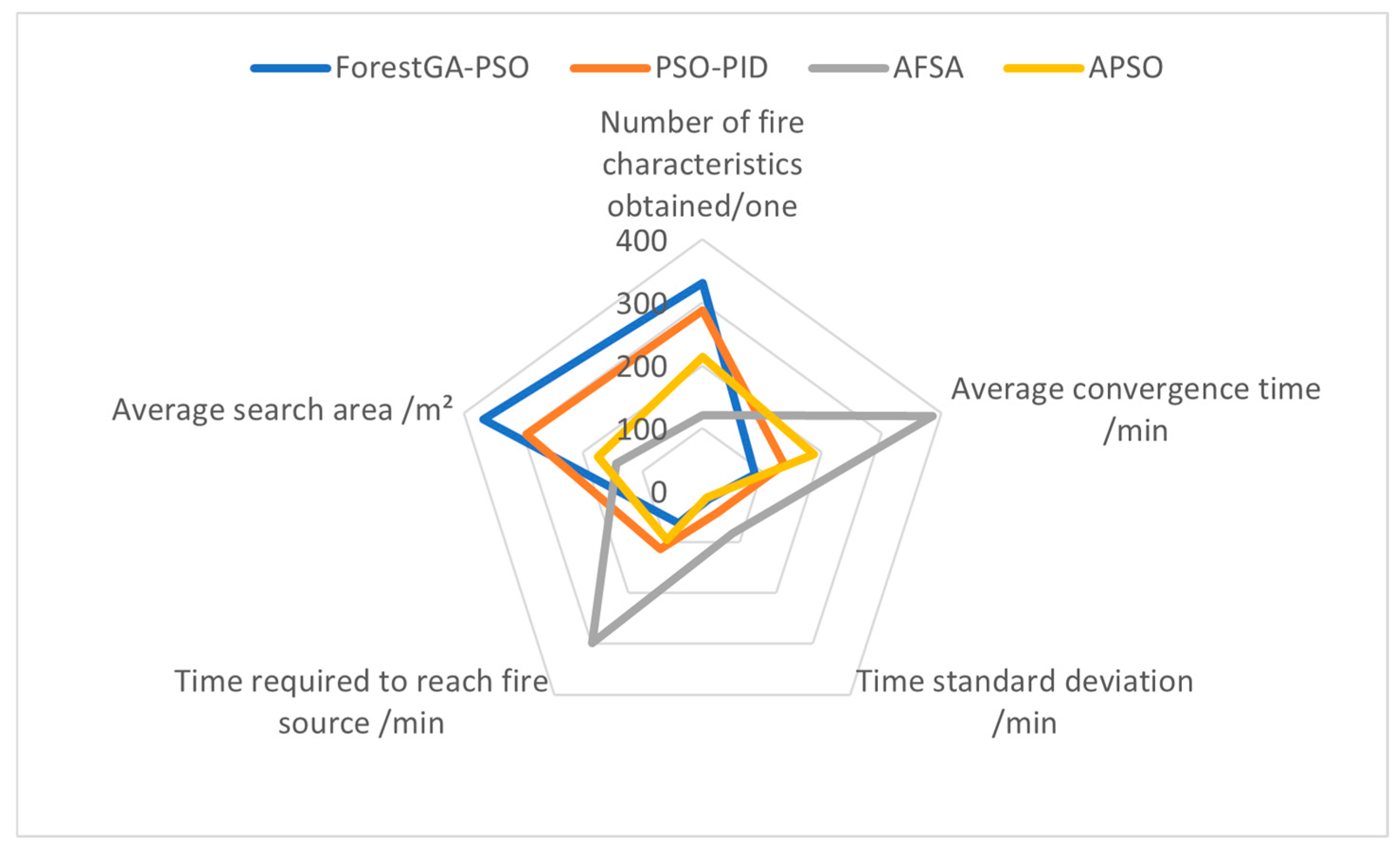
5.5. Comprehensive Comparison of Forest PSO-GA
6. Conclusion and Shortcomings
6.1. Shortcomings and Improvements
6.2. Conclusion
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Song, R.; et al. Path planning of fire-fighting drones for plateau forest fires. Science, Technology and Engineering 2024, 24(34), 14863–14870.
- A., P.; et al. Image processing technique applied to electrical substations based on drones with thermal vision for predictive maintenance. In 2022 IEEE International Conference on Automation/XXV Congress of the Chilean Association of Automatic Control (ICA-ACCA), 2022.
- H., M.J.; et al. Low-cost thermal infrared aided drone for dry patch detection in an intelligent irrigation system. In 2022 IEEE Sensors, 2022. [CrossRef]
- A., B. A., B.; et al. Real-time drone detection and tracking in distorted infrared images. In 2023 IEEE International Conference on Image Processing Challenges and Workshops (ICIPCW), 2023. [CrossRef]
- Mu, S.; Sun, H. Research on the application of drone clusters in forest fire fighting. Forestry Machinery and Woodworking Equipment 2022, 50(09), 34–36+43.
- Finney, M.A. FARSITE: Fire area simulator—Model development and evaluation. USDA Forest Service RM Research Paper, 1998.
- Freire, J.G.; Dacamara, C.C. Using cellular automata to simulate wildfire propagation and to assist in fire management. Natural Hazards & Earth System Science 2019, 19(1), 169–179. [CrossRef]
- Catry, F.X.; Rego, F.C.; Ba o, F.; et al. Modeling and mapping wildfire ignition risk in Portugal. International Journal of Wildland Fire 2009, 18(8), 921–931. [CrossRef]
- Sun, T.; Maître, H.; Sun, H.; et al. A forest fire spread fast model based on cellular automaton in spatially heterogeneous area of China. In Proceedings SPIE 2009, 7498, 749814.
- Morales, G.A.; Morales, R.S.; Valencia, C.F.; et al. A forest fire propagation simulator for Bogotá. In Proceedings—Winter Simulation Conference, 2015, 1505–1515. [CrossRef]
- Chen, Q.; Li, L.; et al. Study on forest fire spreading model based on remote sensing and GIS. IOP Conference Series: Earth and Environmental Science 2019, 1755–1315. [CrossRef]
- Wu, C.D.; Meng, W.; Ji, P.; et al. Parameter estimation based on wireless sensor network for forest fire model. Journal of Northeastern University (Natural Science) 2009, 30(1), 21–25.
- Mysorewala, M.F.; Popa, D.O.; Lewis, F.L. Multi-scale adaptive sampling with mobile agents for mapping of forest fires. Journal of Intelligent & Robotic Systems 2009, 54(4), 535–565. [CrossRef]
- Albright, M.; Meisner, B.N. Classification of fire simulation systems. Fire Management Notes 1999, 35(343), 271–274.
- Kadir, E.A.; Kung, H.T.; AlMansour, A.A.; Irie, H.; Rosa, S.L.; Fauzi, S.S.M. Field hot point prediction and mapping based on deep learning algorithm for environmental monitoring based on long short-term memory network. Environments 2023, 10(7), 124.
- Cao, Z.; Hu, L.; Yang, M.; Wu, F.; Liu, X. Single room fire traceability and prediction model based on deep learning method. Combustion Science and Technology. [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of ICNN'95 - International Conference on Neural Networks; IEEE: Piscataway, 1995; pp. 1942–1948. [CrossRef]
- Yang, Q.; Yang, Z.; Xu, C.; et al. Improved PSO algorithm and its application in UAV power line patrol planning. Applied Science and Technology 2019, 46(3), 80–85.
- Roberge, V.; Tarbouchi, M.; Labonte, G. Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Transactions on Industrial Informatics 2013, 9(1), 132–141. [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimization optimizer. In 1998 IEEE International Conference on Evolutionary Computation Proceedings, IEEE World Congress on Computational Intelligence; IEEE: Piscataway, 1998; pp. 69–73. [CrossRef]
- Hu, M.; Wu, T.; Weir, J.D. An adaptive particle swarm optimization with multiple adaptive methods. IEEE Transactions on Evolutionary Computation 2013, 17(5), 705–720. [CrossRef]
- Cheng, X.; Li, J.; Zheng, C.; et al. An improved PSO-GWO algorithm with chaos and adaptive inertial weight for robot path planning. Frontiers in Neurorobotics 2021, 15, 770361. [CrossRef] [PubMed]
- Yu, Z.; Si, Z.; Li, X.; et al.A novel hybrid particle swarm optimization algorithm for path planning of UAVs. IEEE Internet of Things Journal 2022, 9(22), 22547–22558. [CrossRef]
- Karunanithi, M.; Mouchrik, H.; Rizvi, A.A.; et al. An improved particle swarm optimization algorithm. In 2023 IEEE 64th International Scientific Conference on Information Technology and Management Science of Riga Technical University; IEEE: Piscataway, 2023; pp. 1–6. [CrossRef]
- Peng, P.; Gong, X.; Jiang, J.; et al. An improved multi-dimensional particle swarm-based approach to multi-UAV mission assignment. Journal of Ordnance Equipment Engineering 2023, 44(7), 227–236.
- Shao, S.; Li, H.; Zhao, Y. Multi-UAV cooperative mission planning under faults based on IDPSO. Journal of Ordnance Equipment Engineering 2023, 44(6), 213–222. [Google Scholar]
- Chen, J.T.; Li, H.Y.; Ren, H.R.; Lu, R.Q. Cooperative indoor path planning of multi-UAVs for high-rise fire fighting based on RRT-forest algorithm. Acta Automatica Sinica 2023, 49(12), 2615–2626. [Google Scholar] [CrossRef]
- Alexandridis, A.; Vakalis, D.; Siettos, C.I.; et al. A cellular automata model for forest fire spread prediction: The case of the wildfire that swept through Spetses Island in 1990. Applied Mathematics and Computation 2008, 204(1), 191–201. [CrossRef]
- Andreucci, F.; Arbolino, M.V. A study on forest fire automatic detection systems. Il Nuovo Cimento C 1993, 16(1), 35–50. [Google Scholar] [CrossRef]
- Freire, J.G.; Dacamara, C.C. Using cellular automata to simulate wildfire propagation and to assist in fire management. Natural Hazards & Earth System Science 2019, 19(1), 169–179. [Google Scholar]
- Ma, Z. Effects of forest climate factors on forest fire prevention. Rural Practical Science and Technology Information 2011, 11, 1. [Google Scholar]
- Chen, C.; Peng, L.; Yang, J. UAV small target detection algorithm based on feature enhancement and context fusion. Computer Science 2023, 1–14. [Google Scholar]
- A., S.; R.Y. S.; R.C. L. Autonomous UAV path planning using modified PSO for UAV-assisted wireless networks. IEEE Access 2023, 11, 70353–70367. [CrossRef]
- J. Chen, et al., "Energy Consumption Analysis of UAVs in Complex Terrain Environments," IEEE Transactions on Industrial Informatics, 2022.
- G., M.N.; et al. UAV path planning with an adaptive hybrid PSO. In 2023 International Conference on Information and Communication Technology for Sustainable Development (ICICT4SD); IEEE: Piscataway, 2023.
- Du, Y.; et al. Multi-UAV collaborative trajectory planning based on improved Particle Swarm Optimization. Science Technology and Engineering 2020, 20(32), 13258–13264.
- Zheng, K. Research on multi-UAV formation and obstacle avoidance algorithm for forest inspection. Xi’an University of Technology, 2022.
- Hu, G.; et al. UAV three-dimensional path planning based on IPSO-GA algorithm. Modern Electronic Technology 2023, 46(7), 115–120.
- Zhang, A.; Xu, H.; Bi, W.; Xu, S. Adaptive mutant particle swarm optimization based precise cargo airdrop of unmanned aerial vehicles. Applied Soft Computing 2022, 116, 108262. [Google Scholar] [CrossRef]
- Li, G.Q.; Liang, D.W.; Zhao, Q.Y.; et al. Improved artificial fish swarm algorithm approach to robot path planning problems. In 2020 5th International Conference on Automation, Control and Robotics Engineering (CACRE); IEEE: Piscataway, 2020; pp. 71–75. [CrossRef]
- Wang, H.; Li, C.; Liang, W.; Yao, L.; Li, Y. Design and research on PID parameter tuning based on improved PSO algorithm. Mechanical Design and Manufacturing 2022, 2022(7), 20–24, 28. [Google Scholar]
- Chen, C.; Peng, L.; Yang, J. UAV small target detection algorithm based on feature enhancement and context fusion. Computer Science 2023, 1–14. [Google Scholar]
- A., S.; R.Y. S.; R.C. L. Autonomous UAV path planning using modified PSO for UAV-assisted wireless networks. IEEE Access 2023, 11, 70353–70367. [CrossRef]
- G., M.N.; et al. UAV path planning with an adaptive hybrid PSO. In 2023 International Conference on Information and Communication Technology for Sustainable Development (ICICT4SD); IEEE: Piscataway, 2023. [CrossRef]
- Sheng, G.; et al. Multiscale wildfire and smoke detection in complex drone forest environments based on YOLOv8. Nature 2025, 2025-01-18.
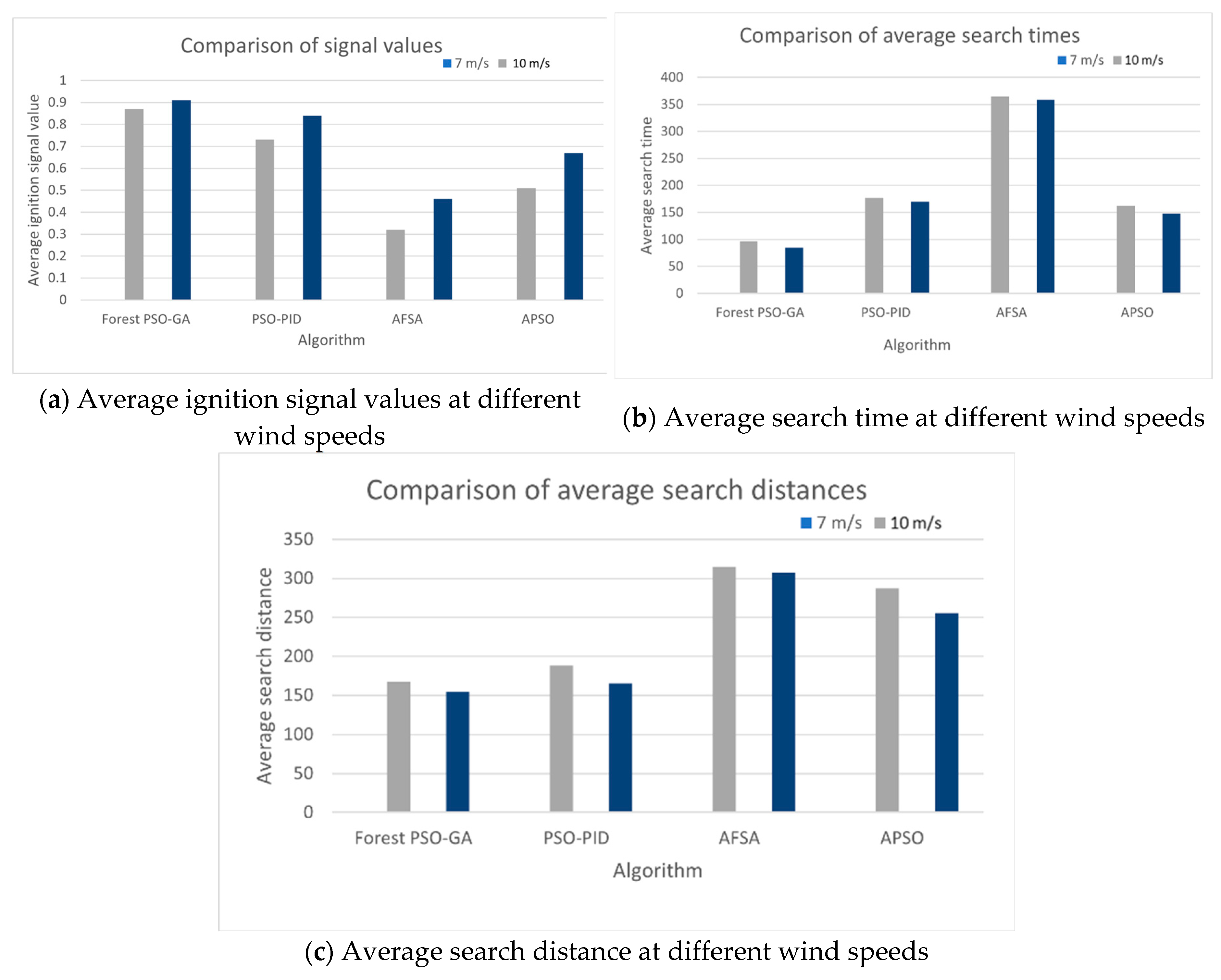

| Comparison of Average Search Time | Forest PSO-GA | PSO-PID | AFSA | APSO |
|---|---|---|---|---|
| Average search time/min | 87.36 | 167.15 | 210.43 | 132.97 |
| Time standard deviation/min | 15.66 | 41.60 | 87.71 | 12.99 |
| Comparison of average error distance | Forest PSO-GA | PSO-PID | AFSA | APSO |
|---|---|---|---|---|
| Average error distance /m | 9.7 | 10.4 | 10.8 | 14.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



