Submitted:
20 December 2024
Posted:
24 December 2024
Read the latest preprint version here
Abstract
Todays ultrasonic transducers find broad application in diverse technology branches and most often cannot be replaced by other actuators. They are typically based on lead containing piezoelectric ceramics, which should be replaced for environmental and health issues by lead-free alternatives. Multiple material alternatives are already known, but there is a lack of information about their technological readiness level. Within this study a small series of prestressed longitudinally vibrating transducers was set up with a standard PZT material and two lead-free variants. The process for building the transducers beginning from the characterization of individual ring ceramics, over burn-in results, free vibration characterization by admittance and vibration measurements, and operation under load are documented. The main result is that the two investigated lead-free materials are ready to use within ultrasonic bolted Langevin transducers (BLT) for medium power range. Since they need higher voltage to achieve the same power level, driving electronics or mechanical setup have to be altered specifically for each material for optimum system setup. Lower self heating of the lead-free material might be attractive for heat sensitive processes.
Keywords:
1. Introduction
2. Materials and Methods
3. Results
3.1. Ring Ceramics at Free Vibration
3.2. Results of the Burn-In Process
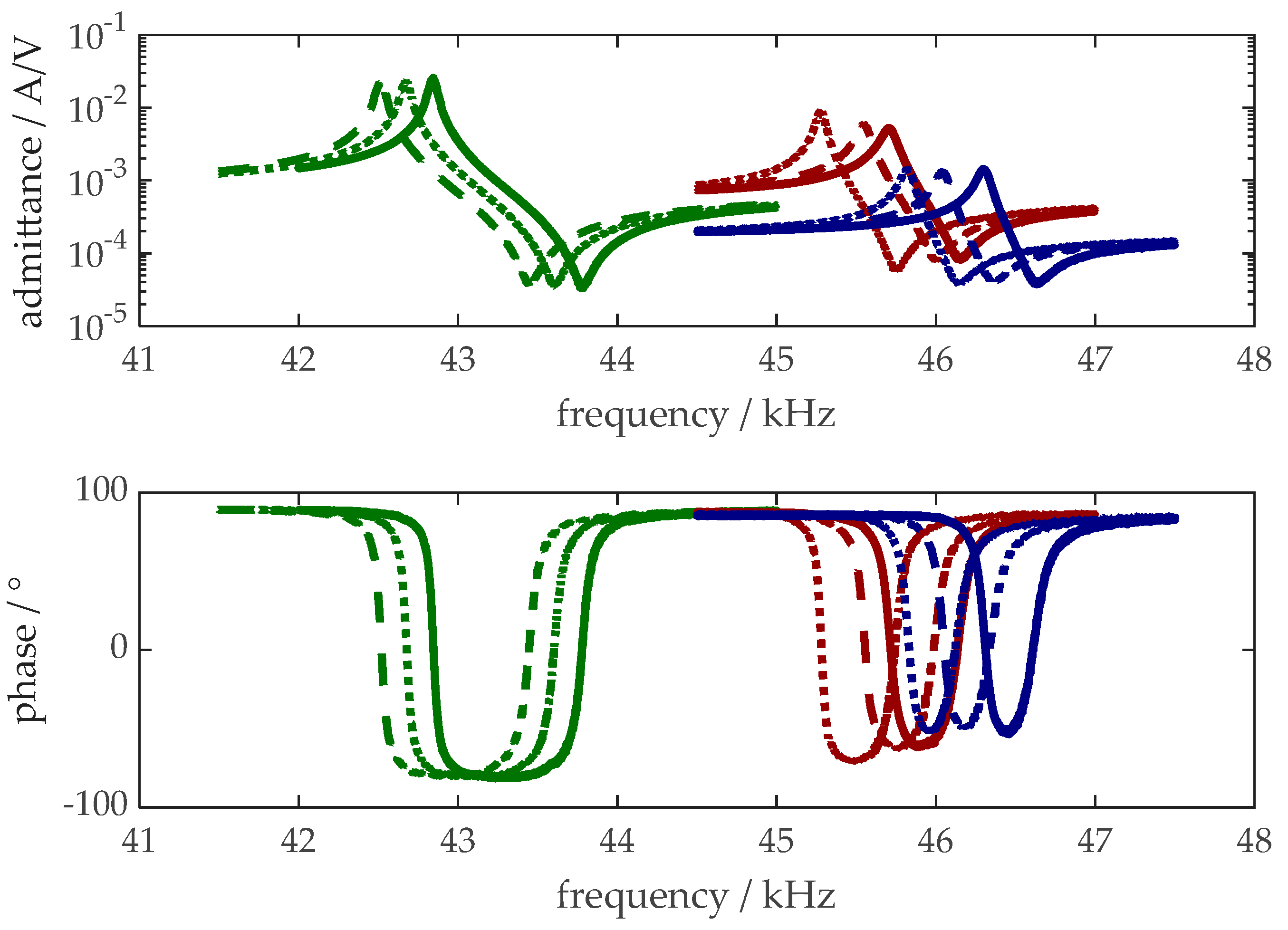
3.3. Characteristics of the Transducers at Free Vibration
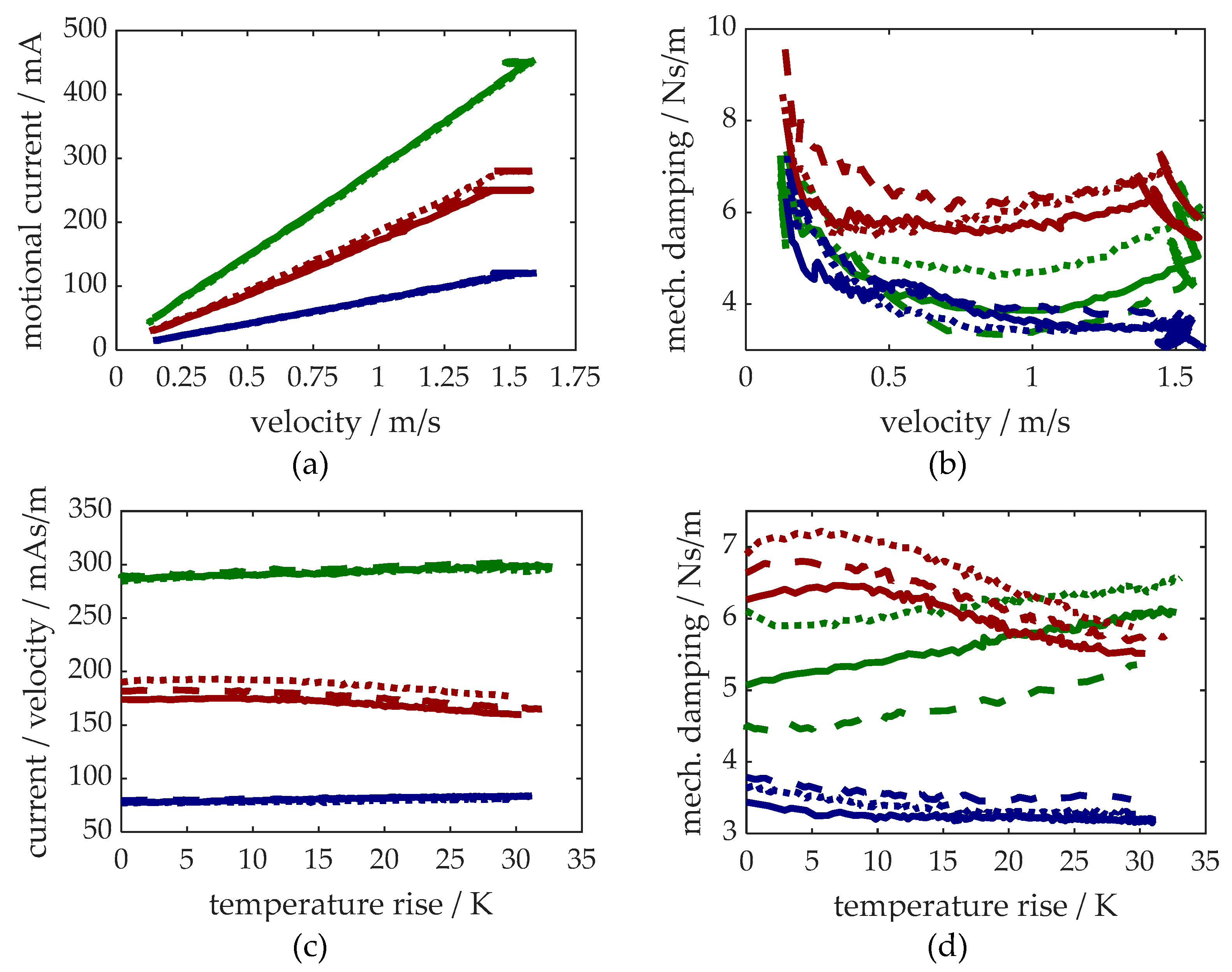
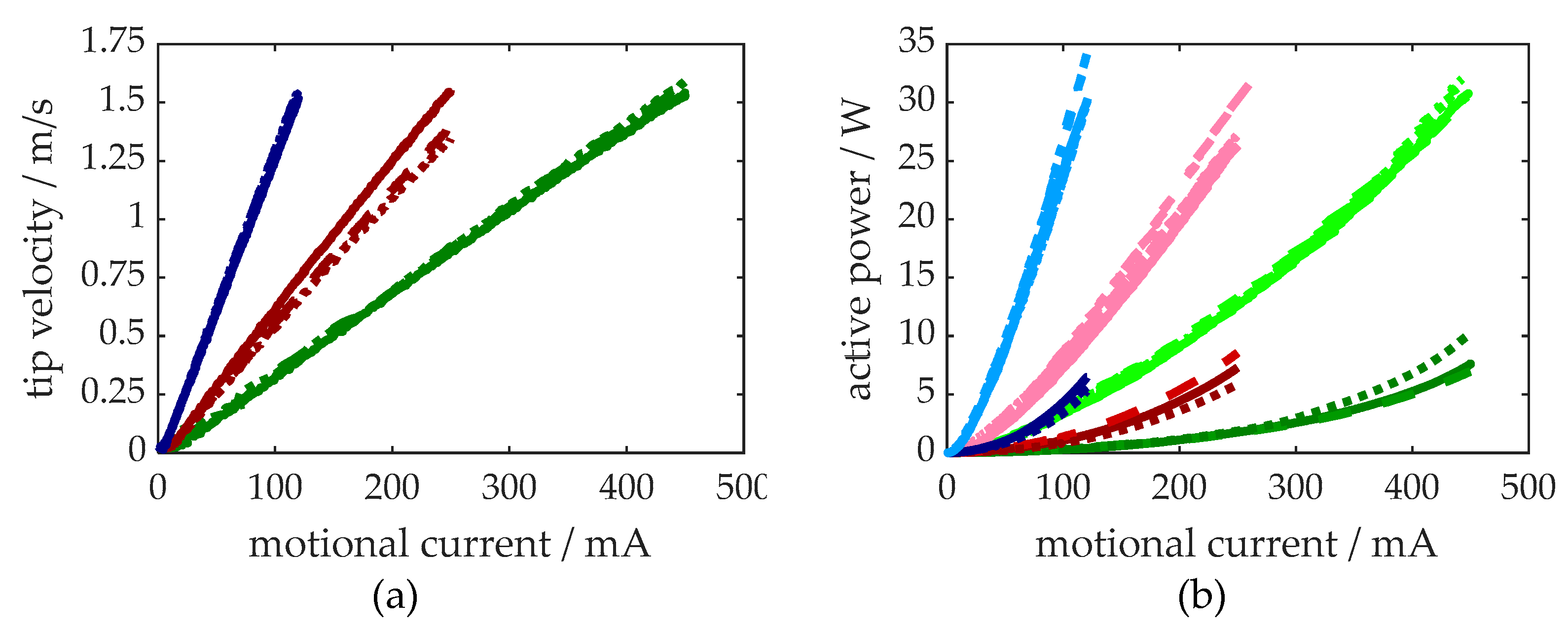
3.4. Characteristics Under Load
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Directive 2011/65/EU of the European Parliament and of the Council of on the restriction of the use of certain hazardous substances in electrical and electronic equipment. EUR-Lex Document 02011L0065-20240801. Available at http://data.europa. 8 June 2011.
- Tou, T.; Hamaguti, Y.; Maida, Y.; Yamamori, H.; Takahashi, K.; Terashima, Y. : Properties of Lead-Free Piezoelectric Ceramics and Its Application to Ultrasonic Cleaner. Proc. Symp. Ultrasonic Electronics, 2008, 29, pp. 363–364. [Google Scholar] [CrossRef]
- Akca, E. , Yilmaz, H.: Lead-free potassium sodium niobate piezoceramics for high-power ultrasonic cutting application: Modelling and prototyping. Proc. and Appl. of Ceramics, -1. [CrossRef]
- Mathieson, A.; DeAngelis, D. A. : Analysis of Lead-Free Piezoceramic-Based Power Ultrasonic Transducers for Wire Bonding. IEEE UFFC, -1. [CrossRef]
- Chan, H. L. W. , Choy, S. H., Chong, C. P., Lo, H. L., Liu, P. C. K.: Bismuth sodium titanate based lead-free ultrasonic transducer for microelectronics wirebonding applications. Ceramics International, 2008, 34, pp. 773–777. [Google Scholar] [CrossRef]
- Kwok, K. W.; Lee, T.; Choy, S. H.; Chan, H. L. W. : Lead-free piezoelectric transducers for microelectronic wirebonding applications. In: Piezoelectric Ceramics. Ed. Ernesto Suaste-Gomez, IntechOpen Limited: London, United Kingdom, 2010, pp. 145-164. [CrossRef]
- Lead-free bolt-clamped Langevin type transducer. Available online: https://en.honda-el.co.jp/product/ceramics/lineup/lead_off/lead-off, accessed on 18-10-2024.
- Langevin, P. : Method and apparatus for transmitting and receiving submarine elastic waves using the piezoelectric properties of quartz. French Patent Office, 1918, Patent.
- Hemsel, T. , Twiefel, J.: Piezoelectric Ultrasonic Power Transducers. In: Encyclopedia of Materials: Electronics. Academic Press, Oxford, United Kingdom, 2023, pp. 276-285. [CrossRef]
- Complete material data set PIC 181, available on request.
- PI Ceramic Material Data, available online: https://www.piceramic.com/fileadmin/user_upload/physik_instrumente/files/datasheets/PI_Ceramic_Material_Data.pdf, accessed on 18-10-2024.
- Li, X.; Fenu, N. G.; Giles-Donovan, N.; Cochran, S.; Lucas, M. Can Mn:PIN-PMN-PT piezocrystal replace hard piezoceramic in power ultrasonic devices? Ultrasonics, 2024, 138. [CrossRef]
- Ringaard, E.; Levassort, F.; Wang, K.; Vaitekunas, J.; Nagata, H. Lead-Free Piezoelectric Transducers. IEEE UFFC, 2024, 71-1, pp. 3-15. [CrossRef]
- Nguyen, T. N.; Thong, H.-C.; Zhu, Z.-X.; Nie, J.-K.; Liu, Y.-X.; Xu, Z.; Soon, P.-S.; Gong, W.; Wang, K. : Hardening effect in lead-free piezoelectric ceramics. J. Mat. Res. 1014; -5. [Google Scholar] [CrossRef]


| Material | PIC 181 [10] | PIC 758 [11] | PIC HQ2 |
|---|---|---|---|
| / | 7850 | 4800 | 4800 |
| 2200 | 585 | 2500 | |
| 1224 | 950 | 254 | |
| 1135 | 850 | 228 | |
| -4,5 | -2,6 | -2,2 | |
| 14,7 | 12,6 | 7,0 | |
| 11,0 | 9,0 | 3,3 | |
| 15,20 | 15,16 | 19,00 | |
| 8,91 | 6,83 | 6,00 | |
| 8,55 | 8,15 | 8,20 | |
| 13,10 | 14,63 | 19,45 | |
| 2,83 | 3,15 | 3,00 | |
| 0,66 | 0,57 | 0,50 | |
| 253 | 170 | 60 |
| Key Figure | PIC 181 | PIC 758 | PIC HQ2 |
|---|---|---|---|
| 958 | 190 | 625 | |
| 557 | 99,45 | 150 |
| PIC | fr | Zmin | keff | Qm | ||||
|---|---|---|---|---|---|---|---|---|
| kHz | σ / % | Ohm | σ / % | - | σ / % | - | σ / % | |
| 181 | 42,68 | 0,31 | 43,66 | 8,67 | 0,21 | 0,23 | 766 | 8,73 |
| 758 | 45,43 | 0,42 | 136,36 | 29,62 | 0,14 | 1,23 | 722 | 24,61 |
| HQ2 | 45,94 | 0,52 | 775,86 | 23,04 | 0,12 | 1,63 | 533 | 16,08 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



