Submitted:
16 October 2024
Posted:
17 October 2024
You are already at the latest version
Abstract
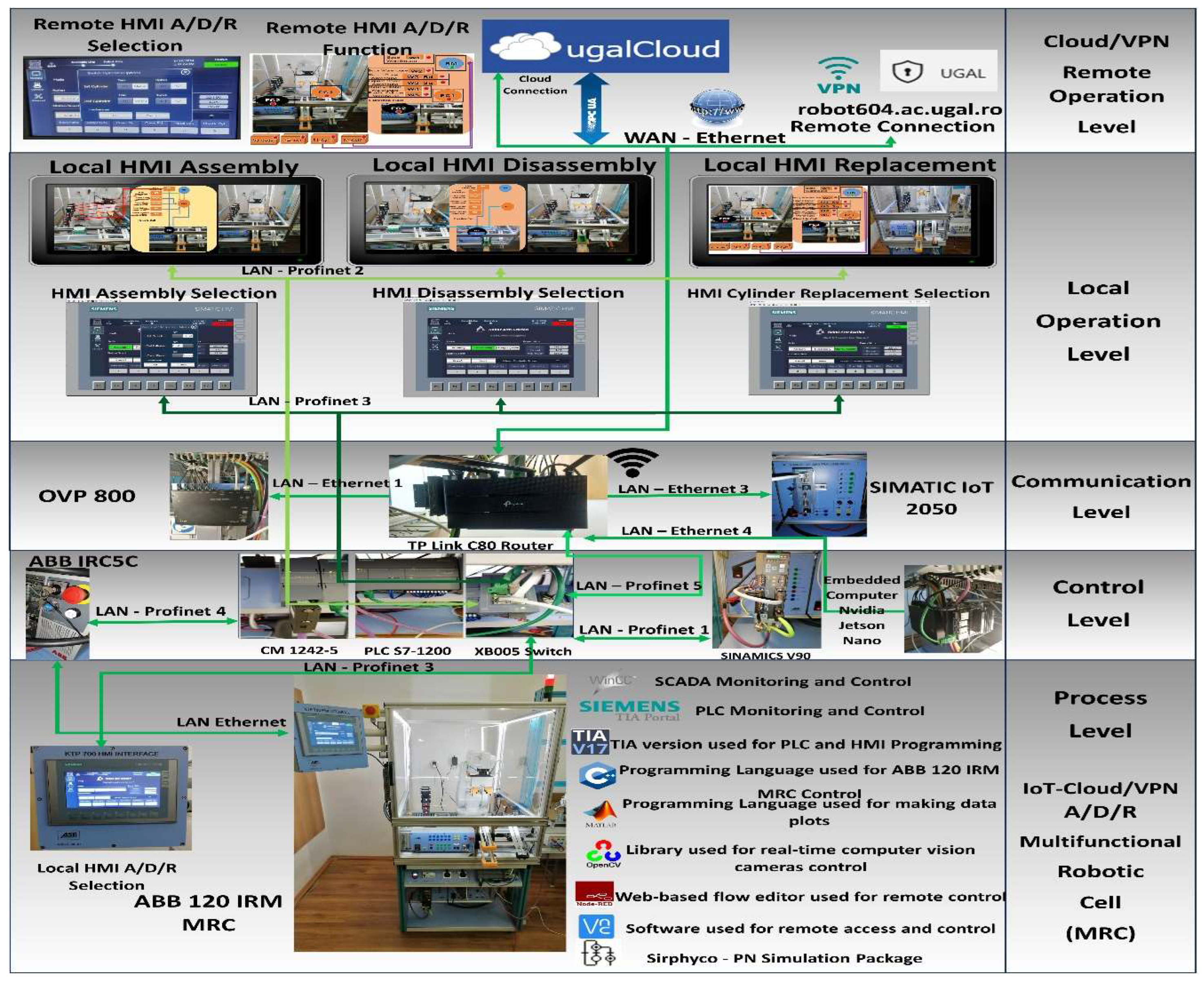
The monitoring and control of an assembly/disassembly/replacement (A/D/R) multifunctional robotic cell (MRC) with the ABB 120 Industrial Robotic Manipulator (IRM) based on IoT (Internet of Things)-Cloud, VPN (Virtual Private Network), and Digital Twin (DT) technology, are presented in this paper. The approach integrates modern principles of smart manufacturing as outlined in Industry/Education 4.0 (automation, data exchange, smart systems, machine learning, predictive maintenance) and Industry/Education 5.0 (human-robot collaboration, customization, robustness and sustainability). Artificial intelligence (AI) based on Machine Learning (ML) enhances system flexibility, productivity, and user-centered collaboration. Several IoT edge devices are engaged, connected in a local network (LAN), for remote and local processing and data acquisition. The system is connected to the Internet, via Wireless Area Network (WAN) and allows remote control via Cloud and VPN. IoT dashboards, as human machine interfaces (HMIs), SCADA (Supervisory Control and Data Acquisition) and OPC-UA (Open Platform Communication-Unified Architecture) facilitate remote monitoring and control of MRC, planning and management of A/D/R task. The assignment, planning and execution of A/D/R tasks were carried out using an augmented reality (AR) tool. Synchronized timed Petri nets (STPN) were used as digital twin like a virtual reality (VR) representation of A/D FRC operations. This integration of an advanced technology into a laboratory mechatronic system, where the devices are organized in a decentralized, multilevel architecture, creates a smart, flexible, and scalable environment that caters to both industrial applications and educational frameworks.
Keywords:
1. Introduction
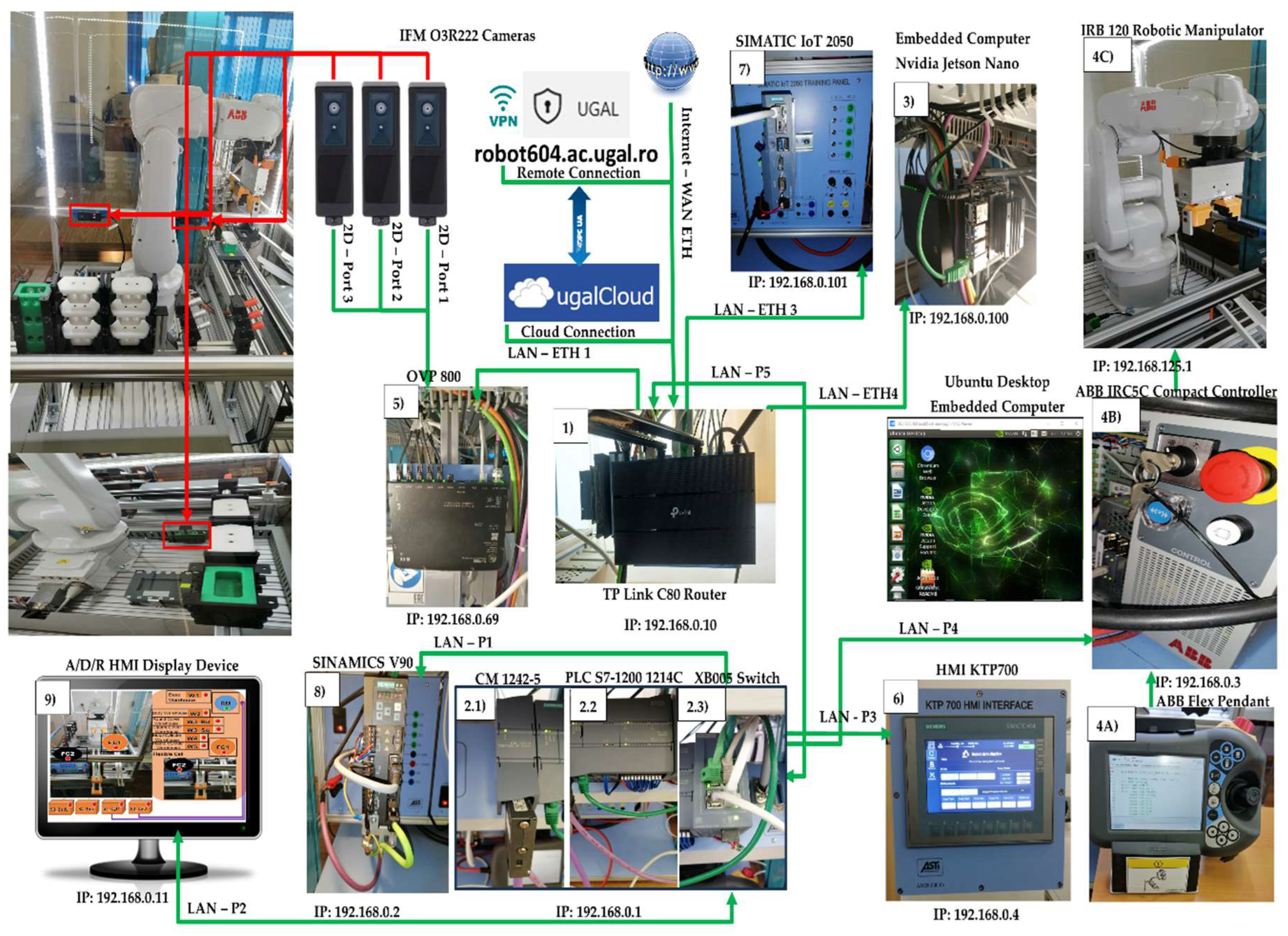
2. Hardware Structure of A/D/R MRC
2.1. IoT Edge Devices and LAN/WAN Networking
2.2. Cloud and VPN-Based Monitoring and Control Multilevel Architecture
3. Digital Twin’s Virtual World Counterpart of A/D/R MRC
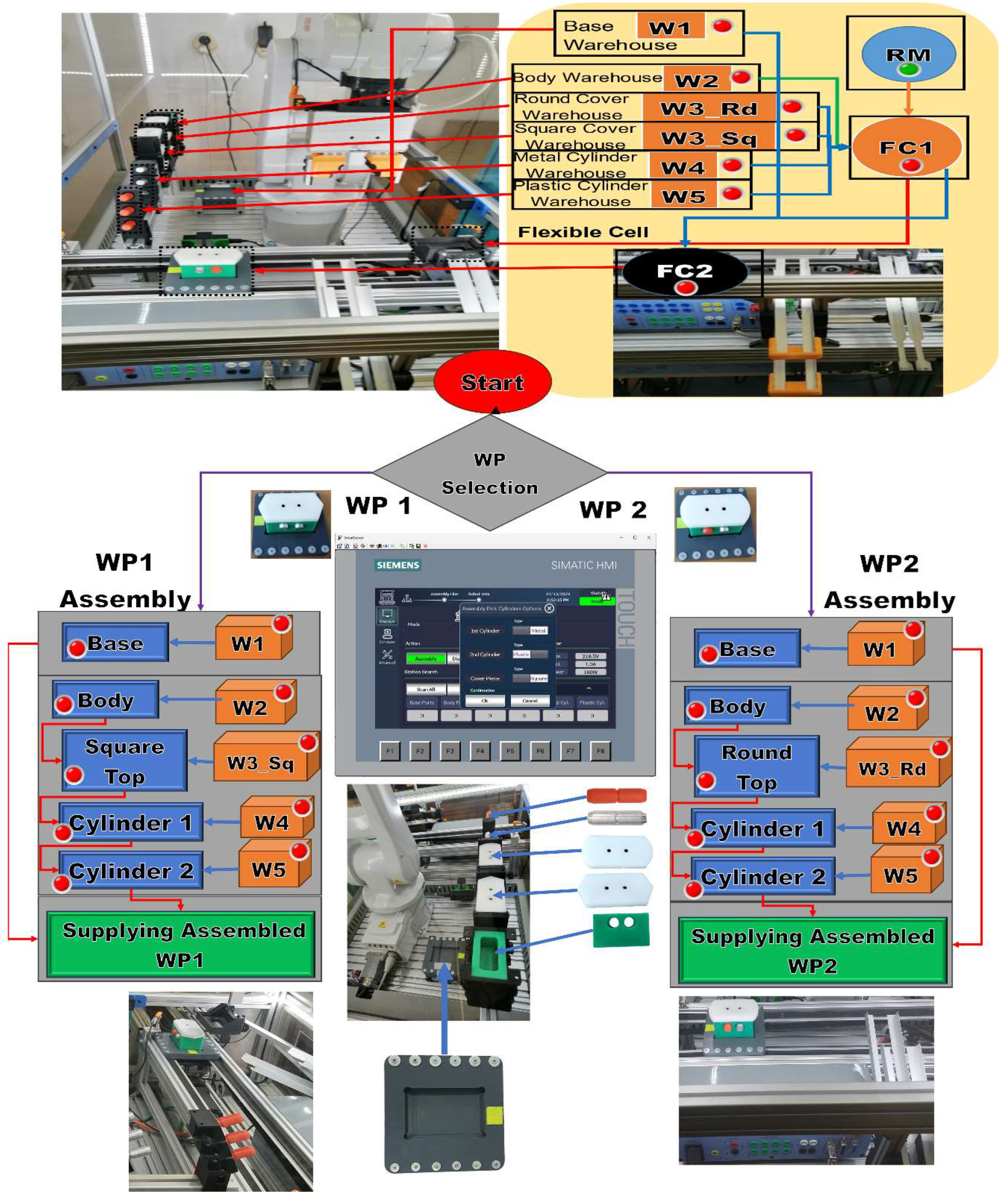
3.1. Planning Tasks for Assembly as Augmented Reality
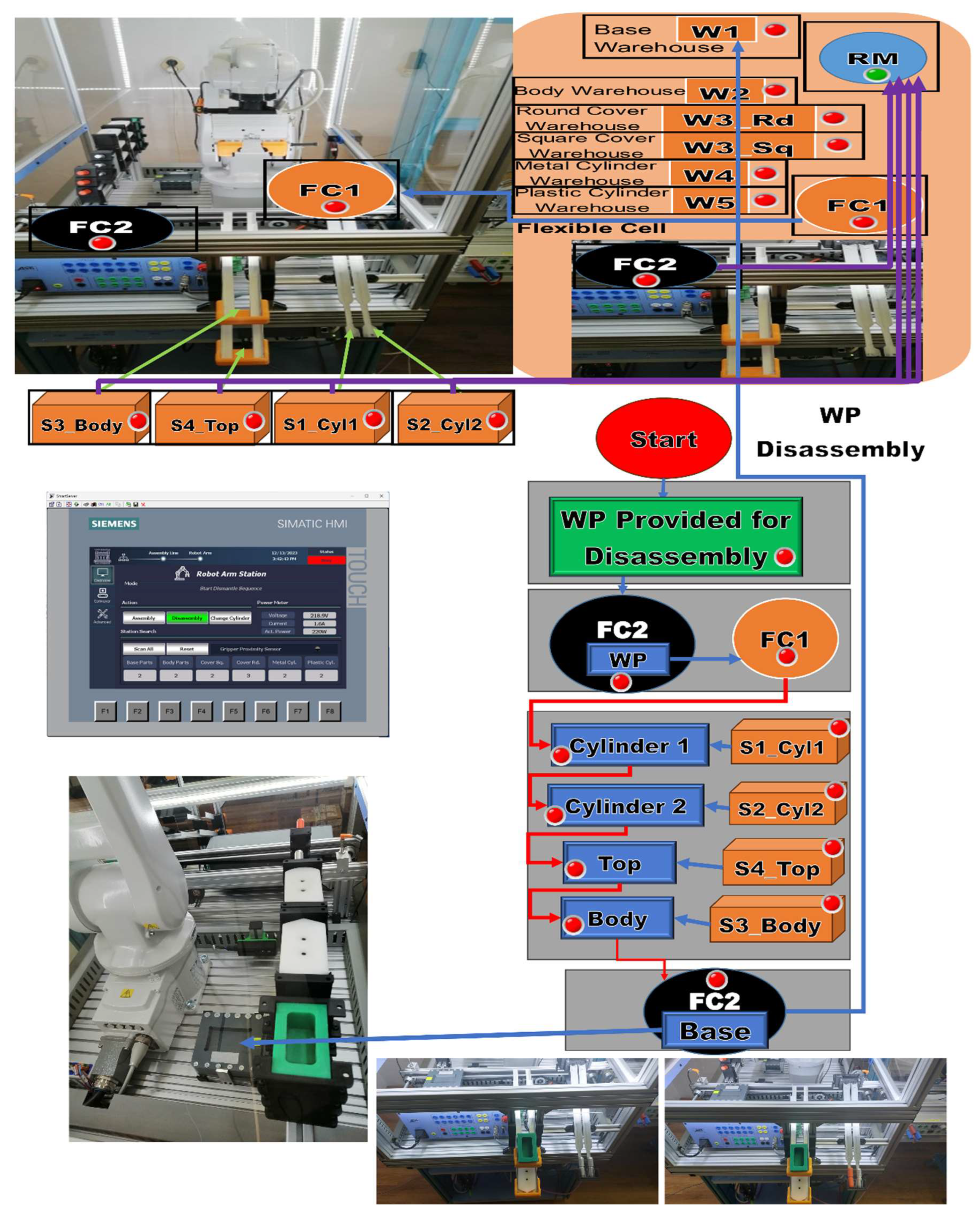
3.2. Planning Tasks for Disassembly as Augmented Reality
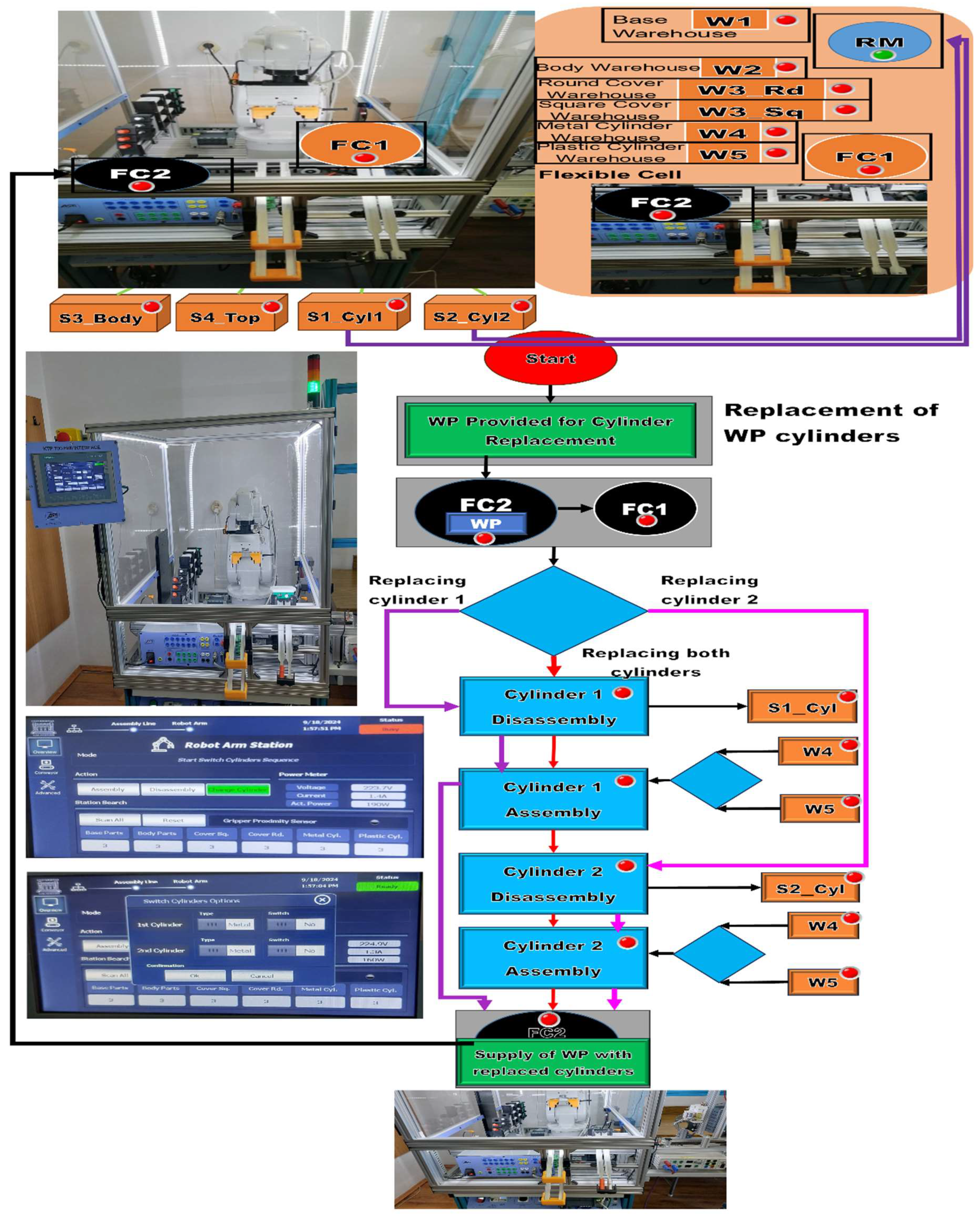
3.3. Planning Tasks for Replacing Cylinders as Augmented Reality
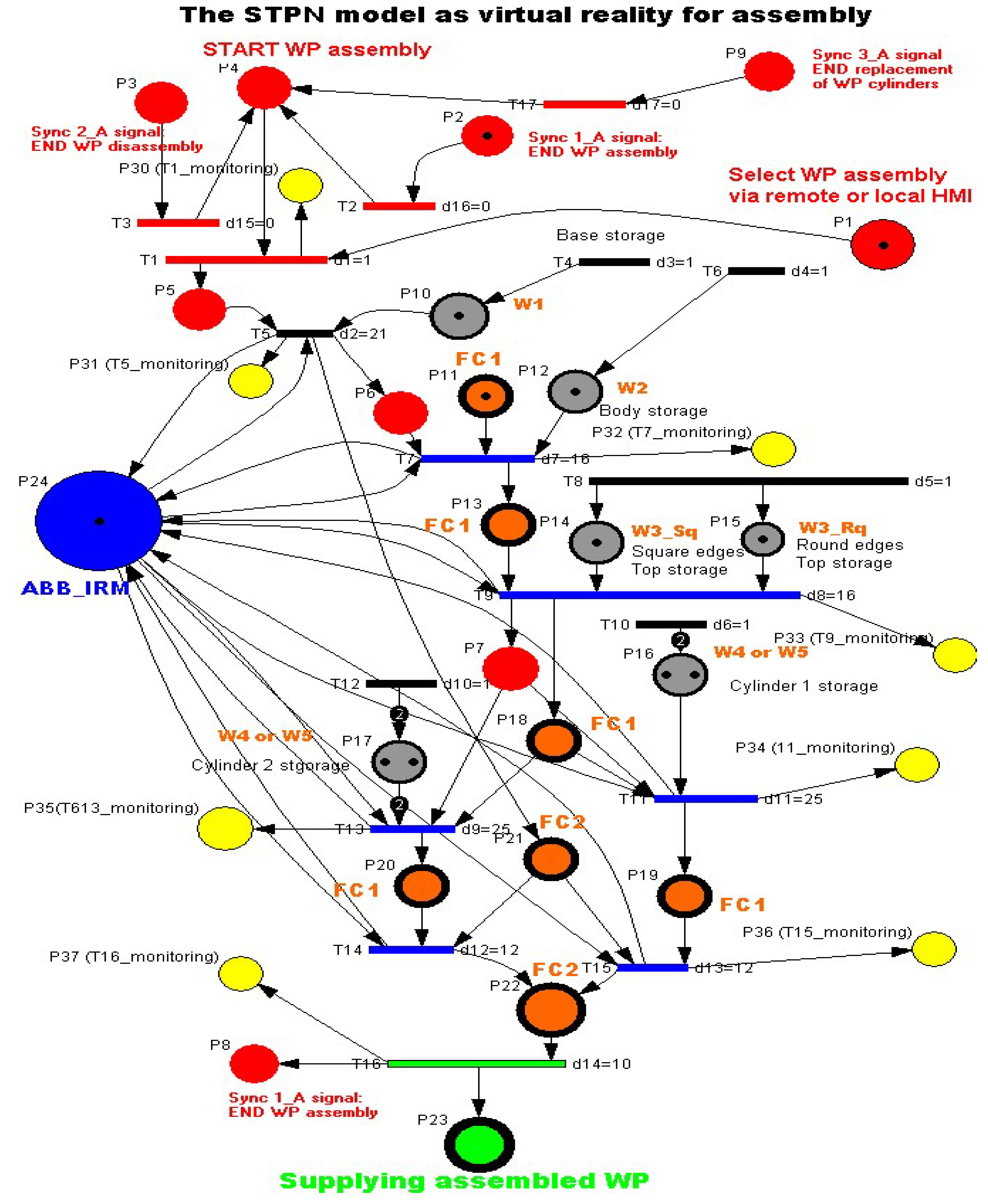
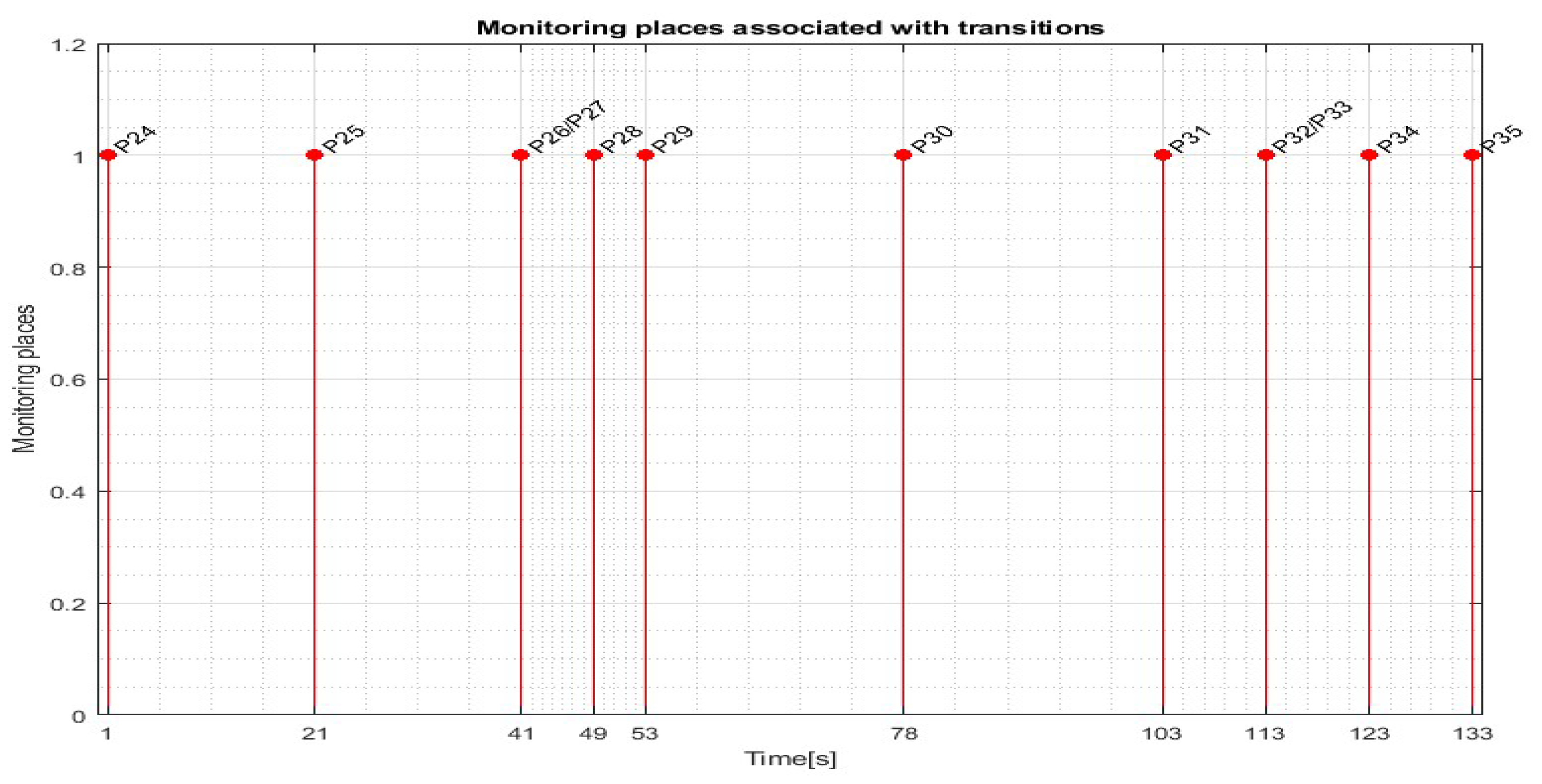
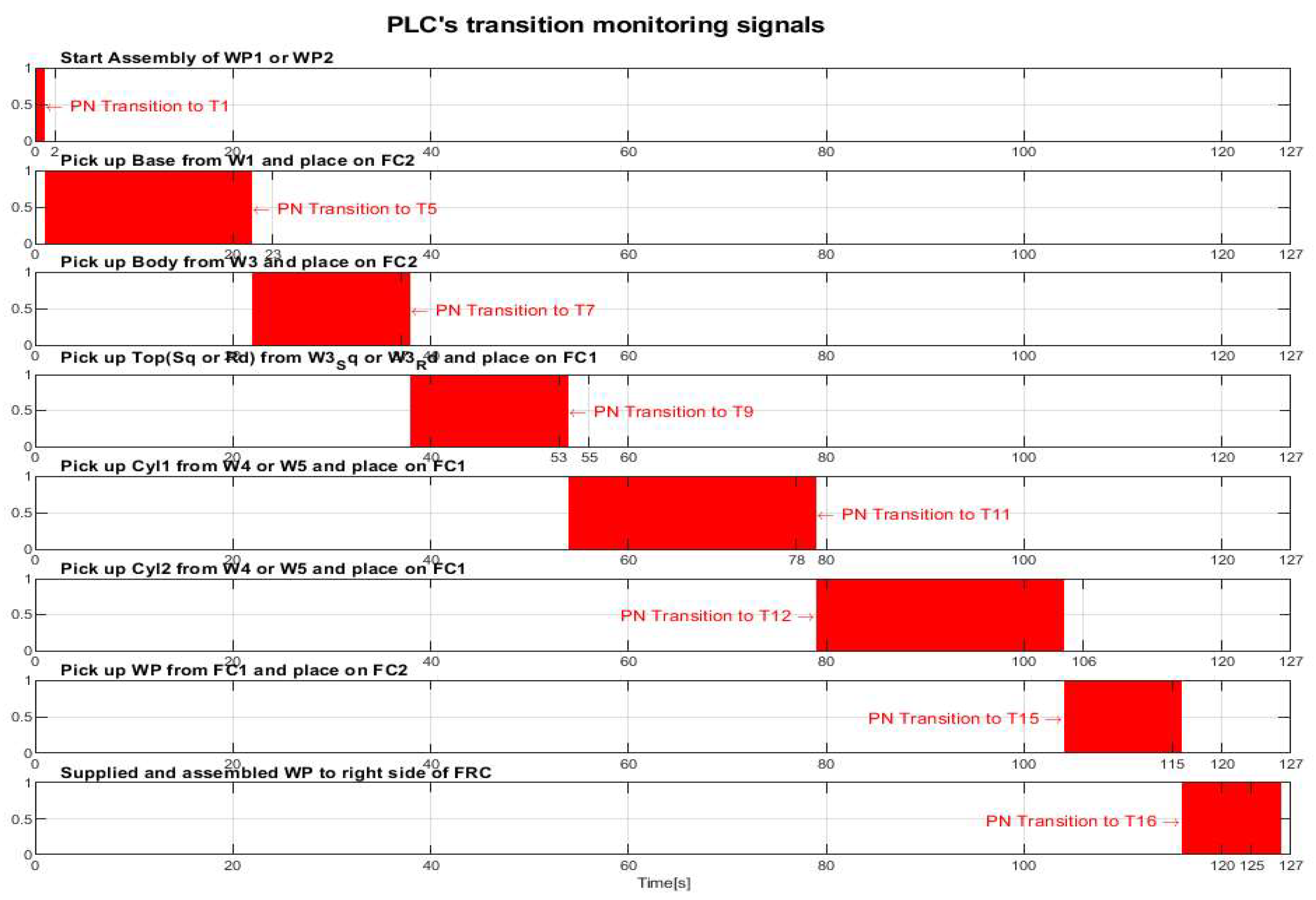
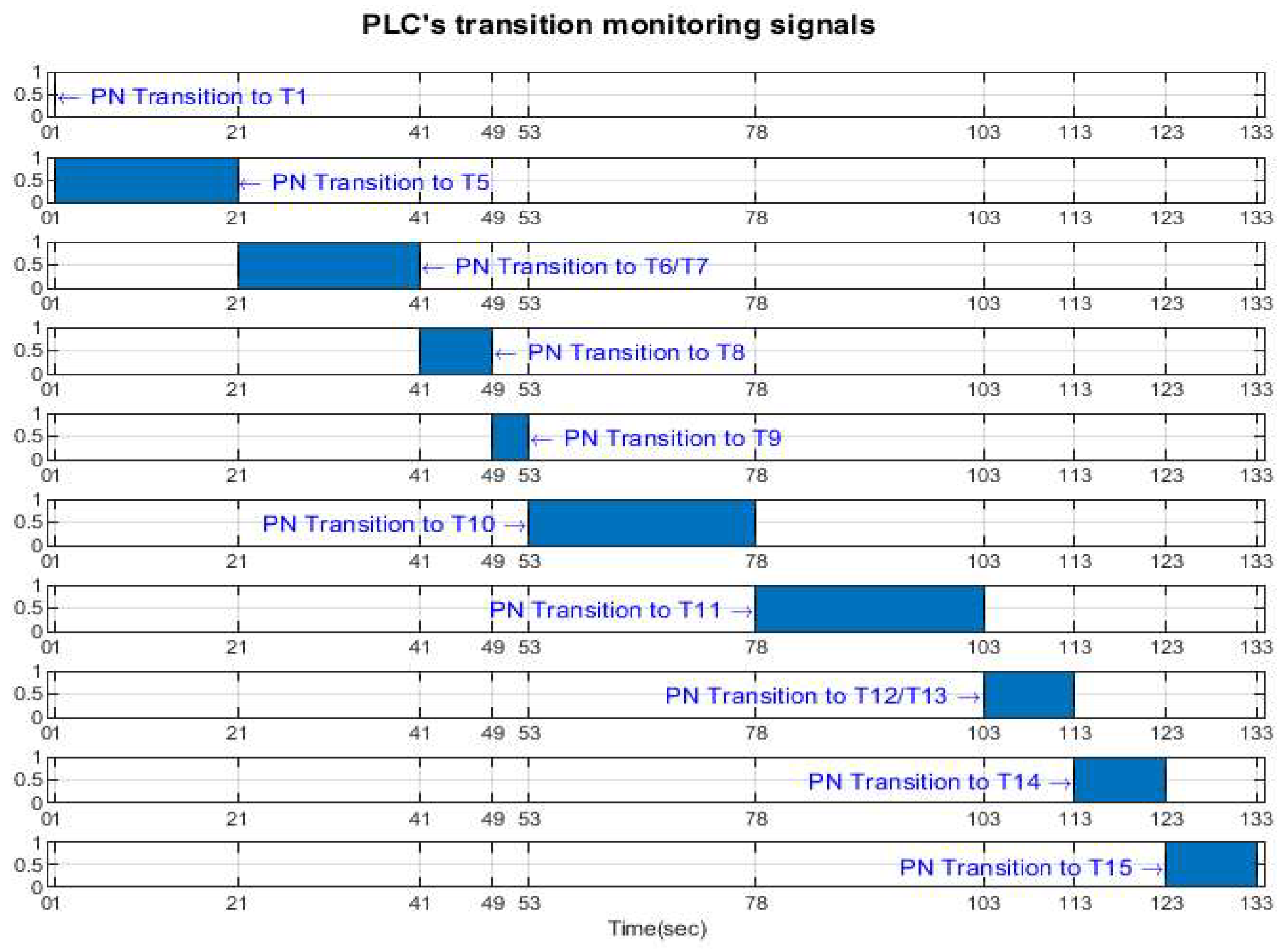
3.4. STPN Model, Formalism and Simulation for Assembly as Virtual Reality
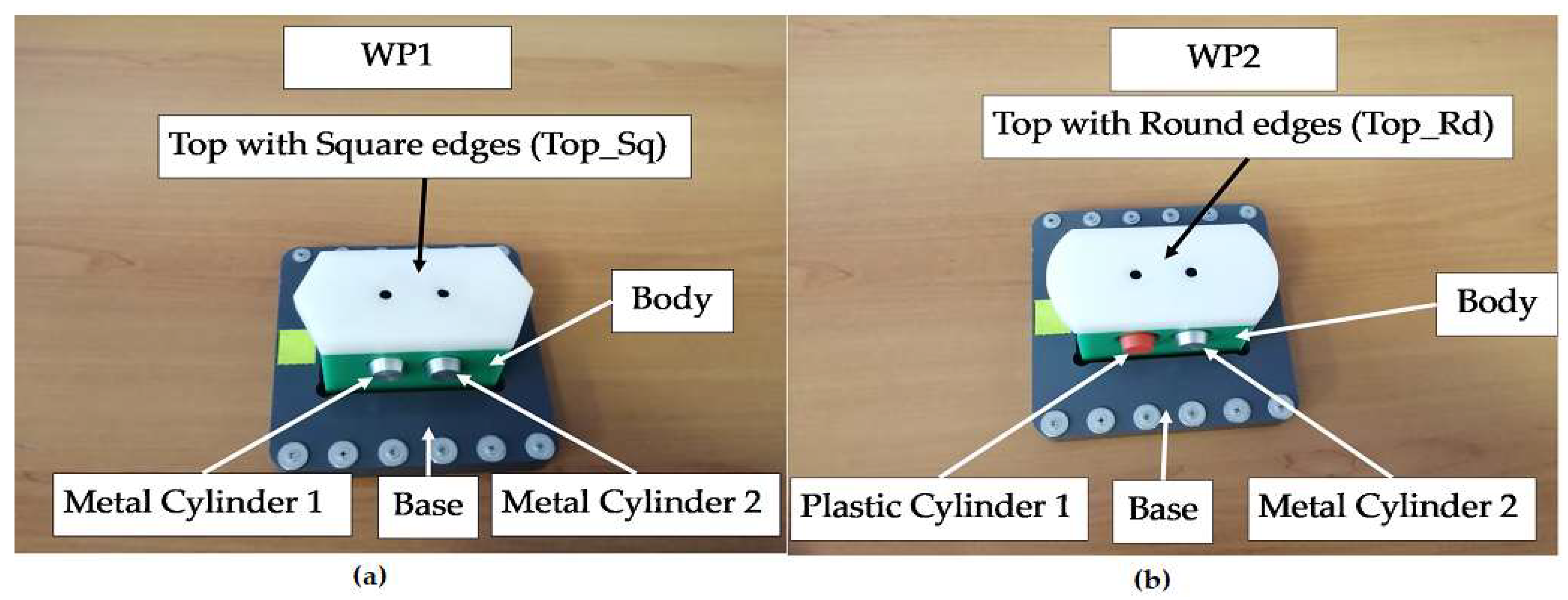
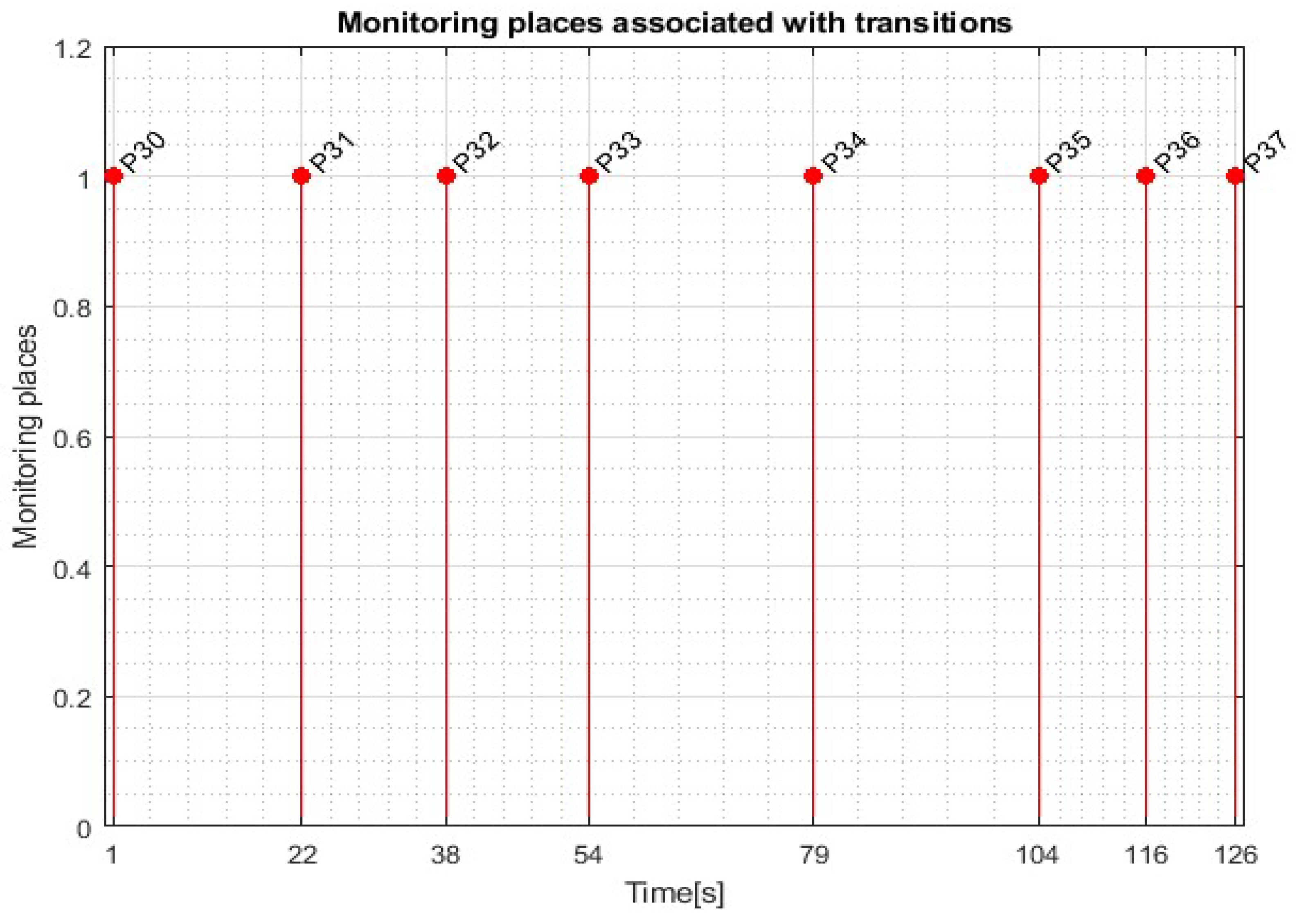
- is the places set partitioned in:where:represents the state set associated to control functions of the decision actions,represents the set of the discrete places modeling the flexible assembly operations for the two work pieces, WP1 and WP2,represents the set of the states the to monitoring of the successive assembly actions for WP1 or WP2.
- is the transitions set partitioned in:where:is the set of the discrete transitions for the two workpiece (WP1, WP2) assembly,is the transition associated with the conveyor transport of the assembled workpiece at the right exit of the MRC.
- is the input incidence function.
- is the output incidence function.
- is the initial marking of the STPN corresponding to the initial state of the modeled process.
- is a function that defines the timings associated to the transitions.is the set of external events.
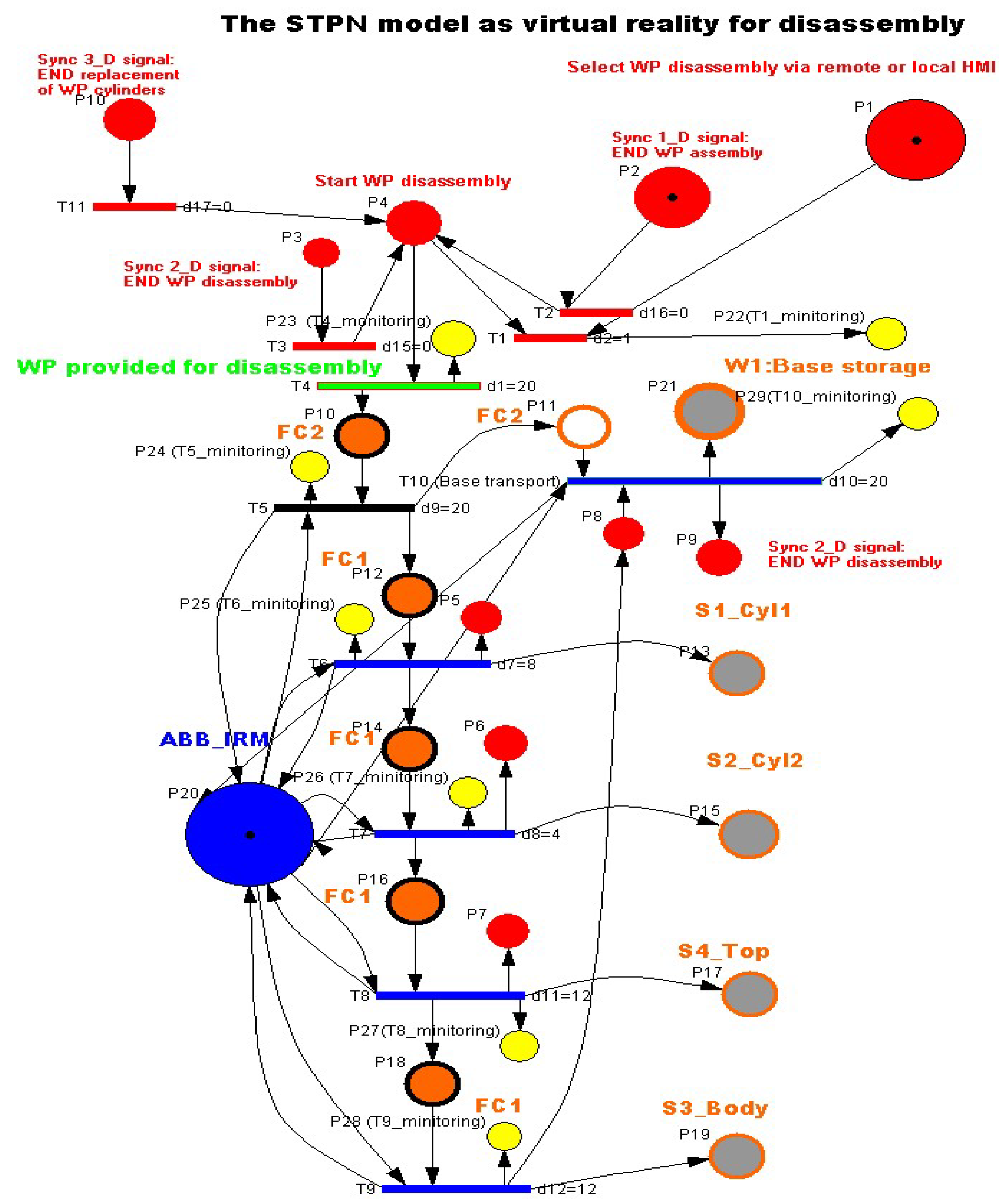
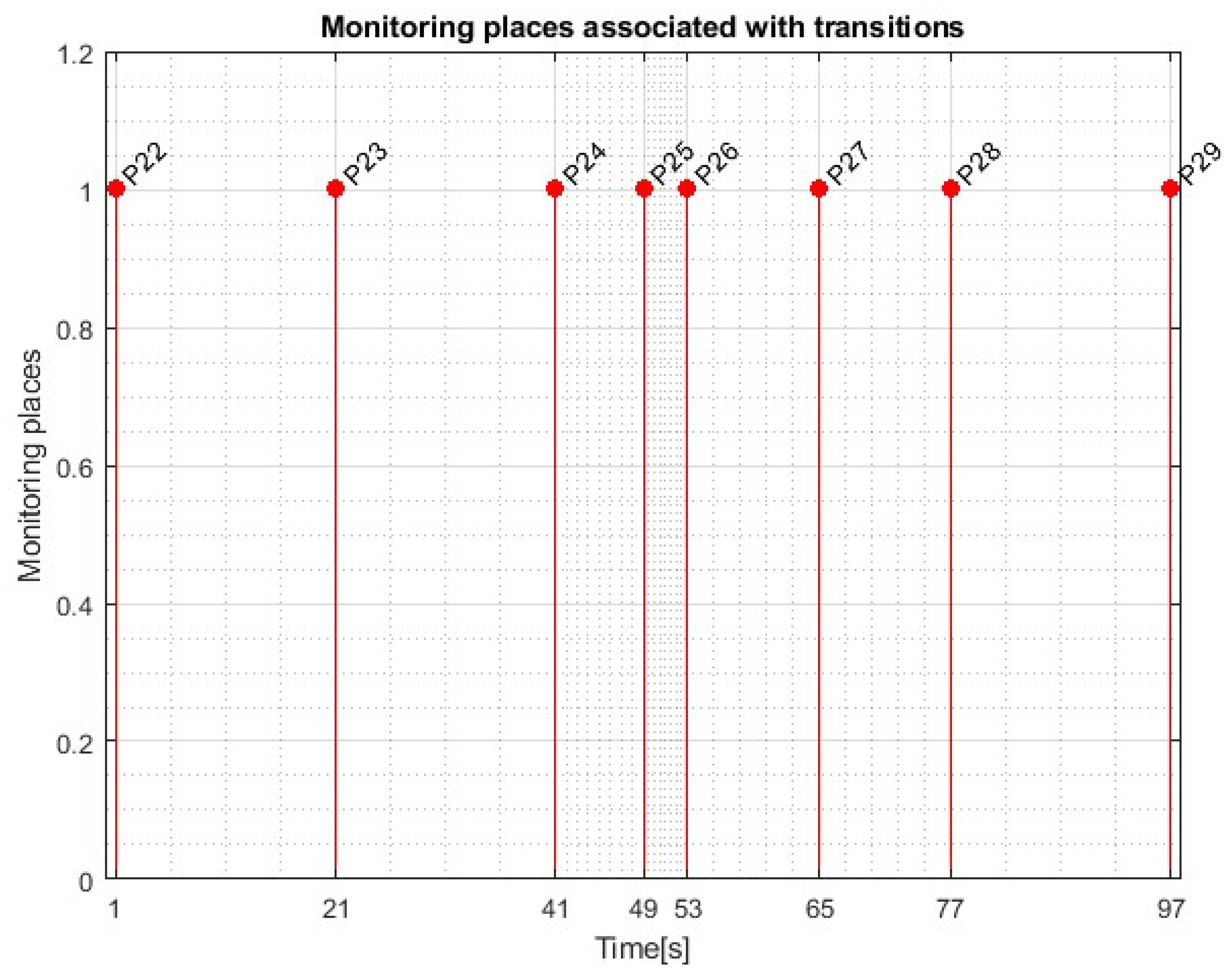
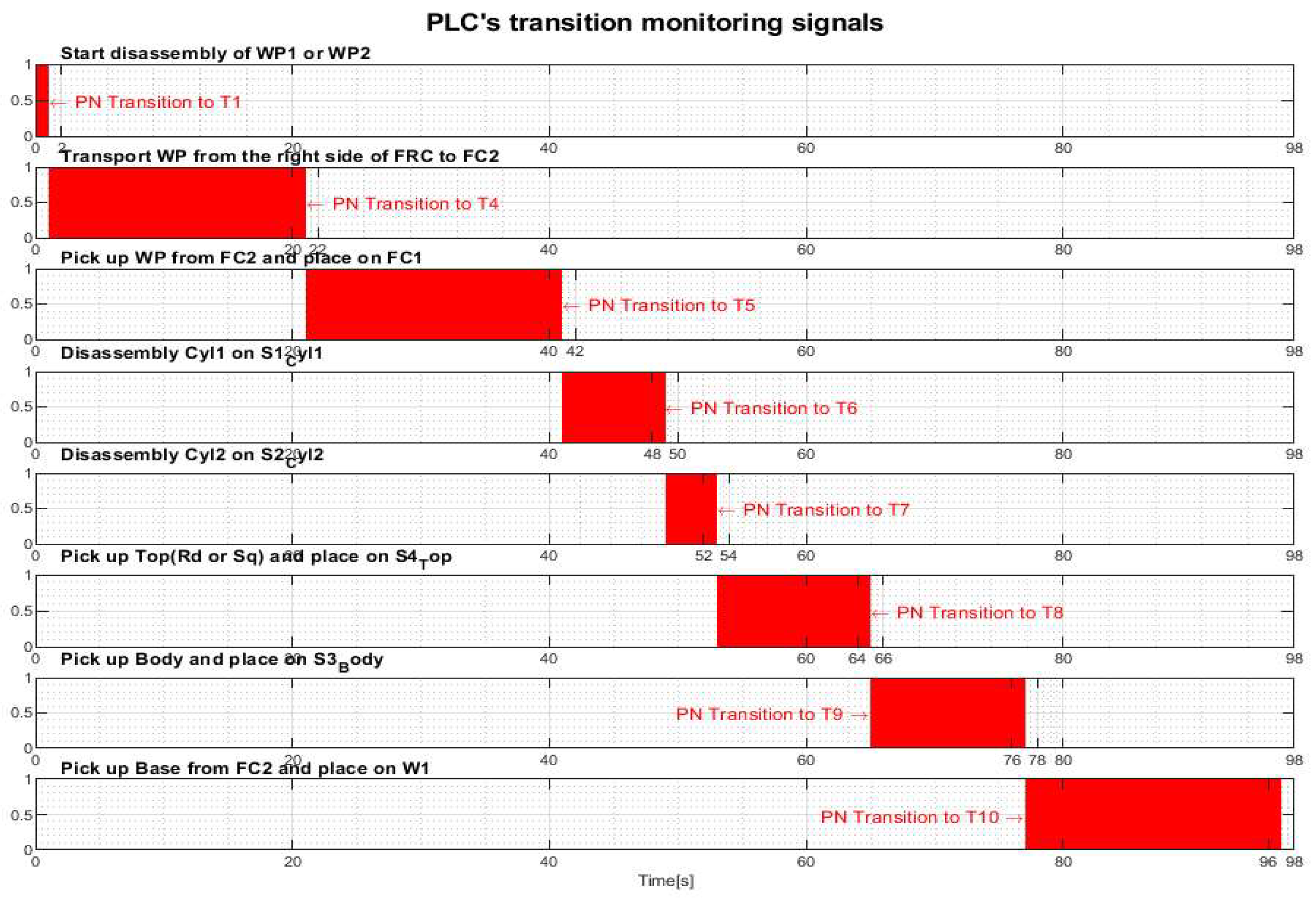
3.5. STPN Model, Formalism and Simulation for Disassembly as Virtual Reality
- is the set of places set, partitioned in:where:represents the set of states, associated to the control functions of the decision actions,represents the set of the discrete places modeling the flexible disassembly operations for the two workpieces (WP1 and WP2),represents the states set associated to the monitoring of the successive disassembly actions for WP1 or WP2.
- is the transitions set partitioned in:where:is the set of discrete transitions associated to WP delivered for disassembly,is the set of the discrete transitions for the two workpiece (WP11 or WP2) disassembly.
- is the input incidence function.
- is the output incidence function.
- is the initial marking of the STPN corresponding to the initial state of the modeled process.
- is a function that defines the timings associated to the transitions.is the set of external events.
- Ed1 = Sync1_D signal is synchronization signal for: END WP assembly of the WP1 or WP2.
- Ed2 = Sync2_D signal is synchronization signal for: END WP disassembly of the WP1 or WP2.
- Ed3 = Sync3_D signal is synchronization signal for: END replacement of WP cylinders of the WP1 or WP2.
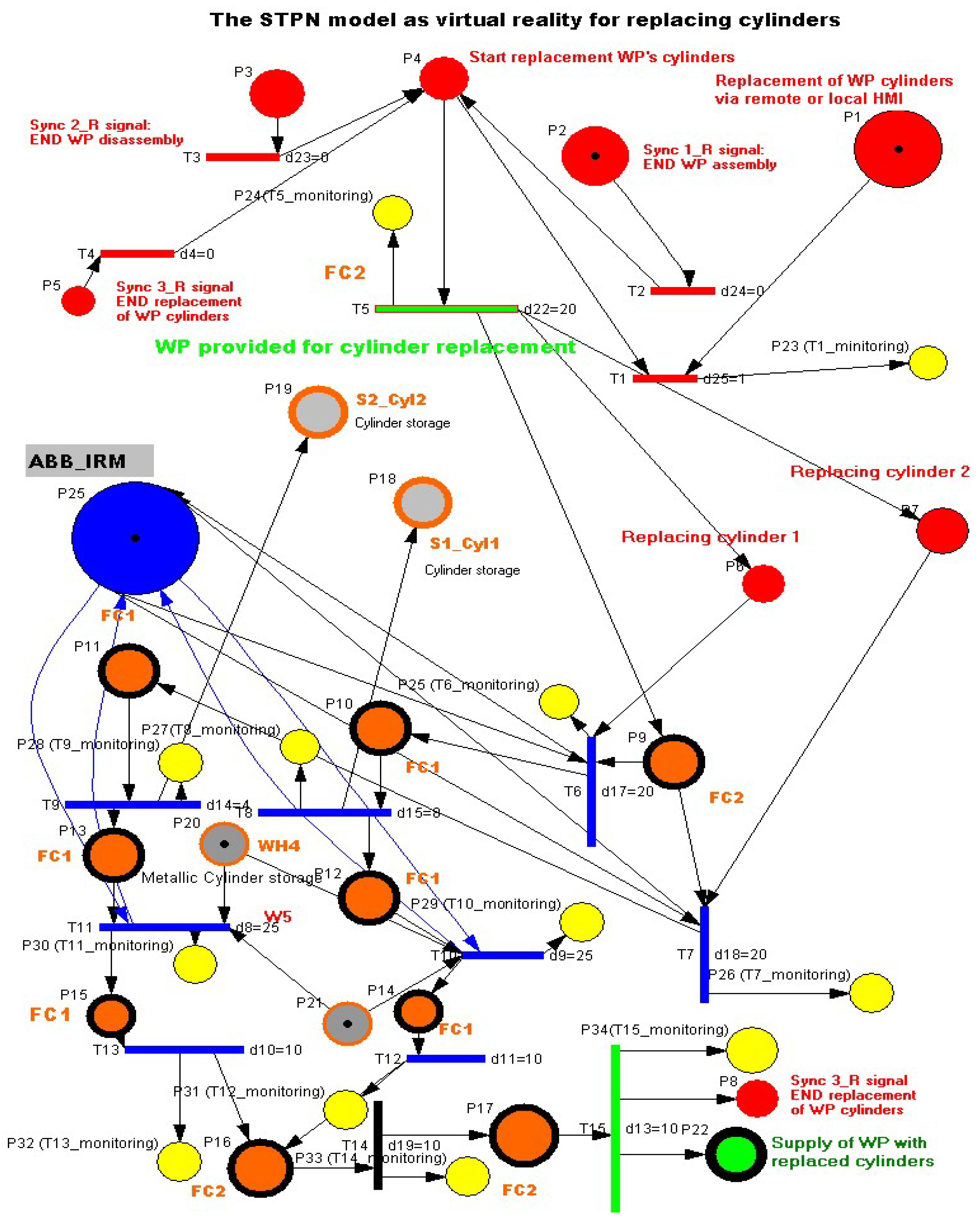
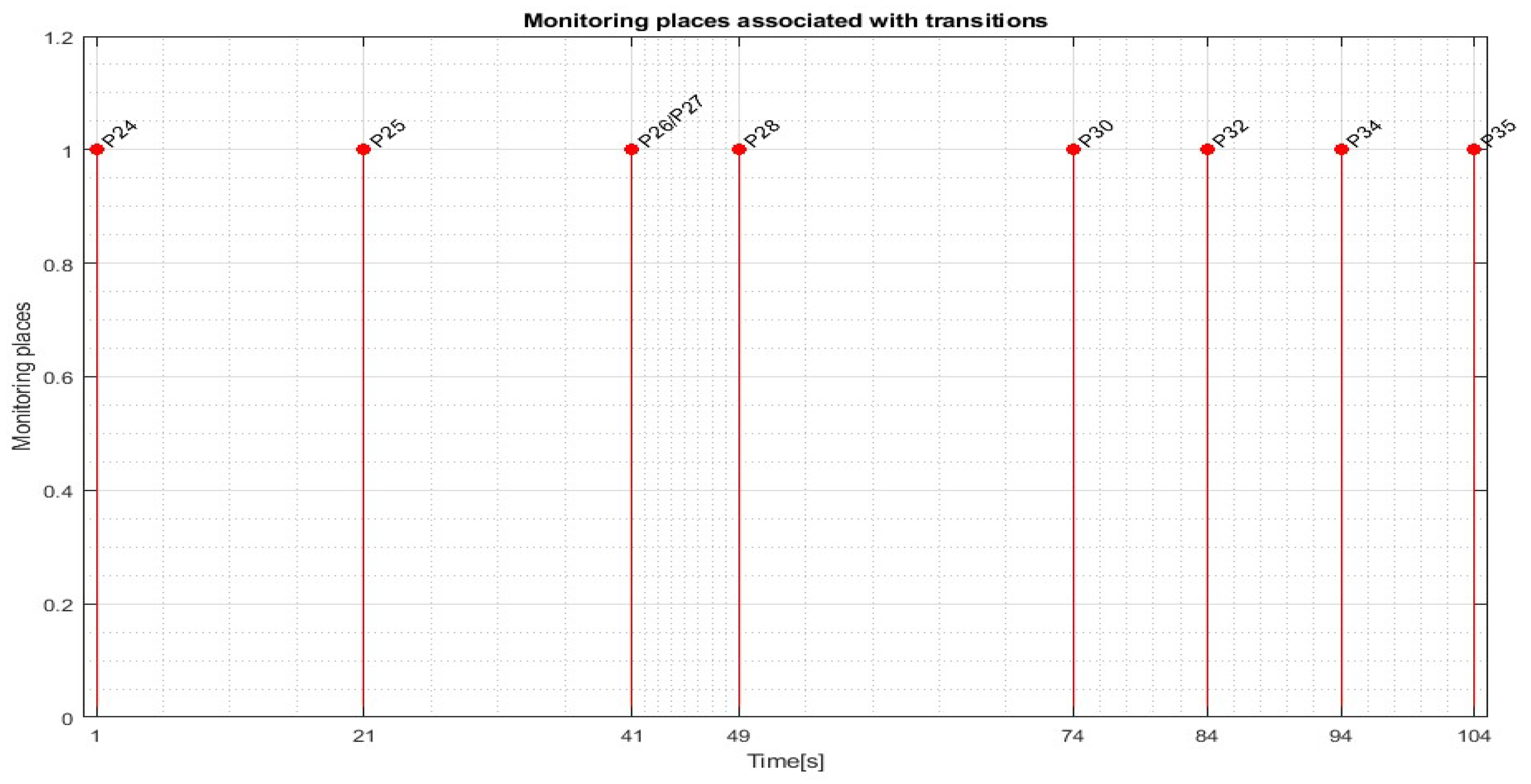
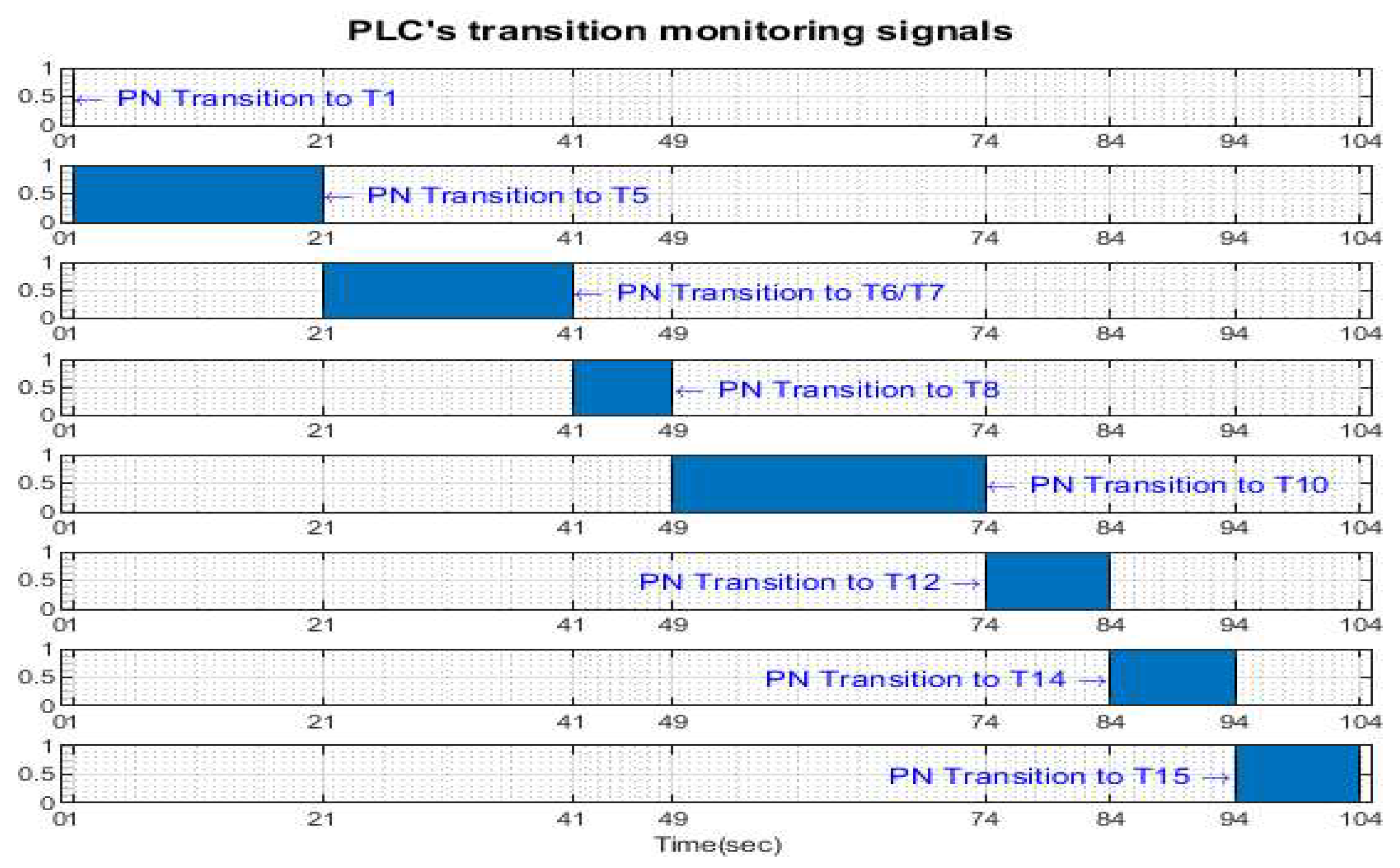
3.6. STPN Model, Formalism and Simulation for Cylinder Replacement as Virtual Reality
- is the set of places, partitioned in:where:represents the set of states, associated to the control functions of the decision actions,represents the set of the discrete places modeling the flexible disassembly operations for the two workpieces (WP1 and WP2),represents the states set associated to the monitoring of the disassembly actions .
- is the transitions set partitioned in:where:is the set of discrete transitions associated to WP delivered for disassembly,is the set of the discrete transitions for cylinder replacement of the two workpiece.is the transition associated with the conveyor transport to the right exit of the MRC of the workpiece with cylinder replaced.
- is the input incidence function.
- is the output incidence function.
- is the initial marking of the STPN corresponding to the initial state of the modeled process.
- is a function that defines the timings associated to the transitions.is the set of external events.
- Ed1 = Sync1_R signal is synchronization signal for: END WP assembly of the WP1 or WP2.
- Ed2 = Sync2_R signal is synchronization signal for: END WP disassembly of the WP1 or WP2.
- Ed3 = Sync3_R signal is synchronization signal for: END replacement of WP cylinders of WP1 or WP2.
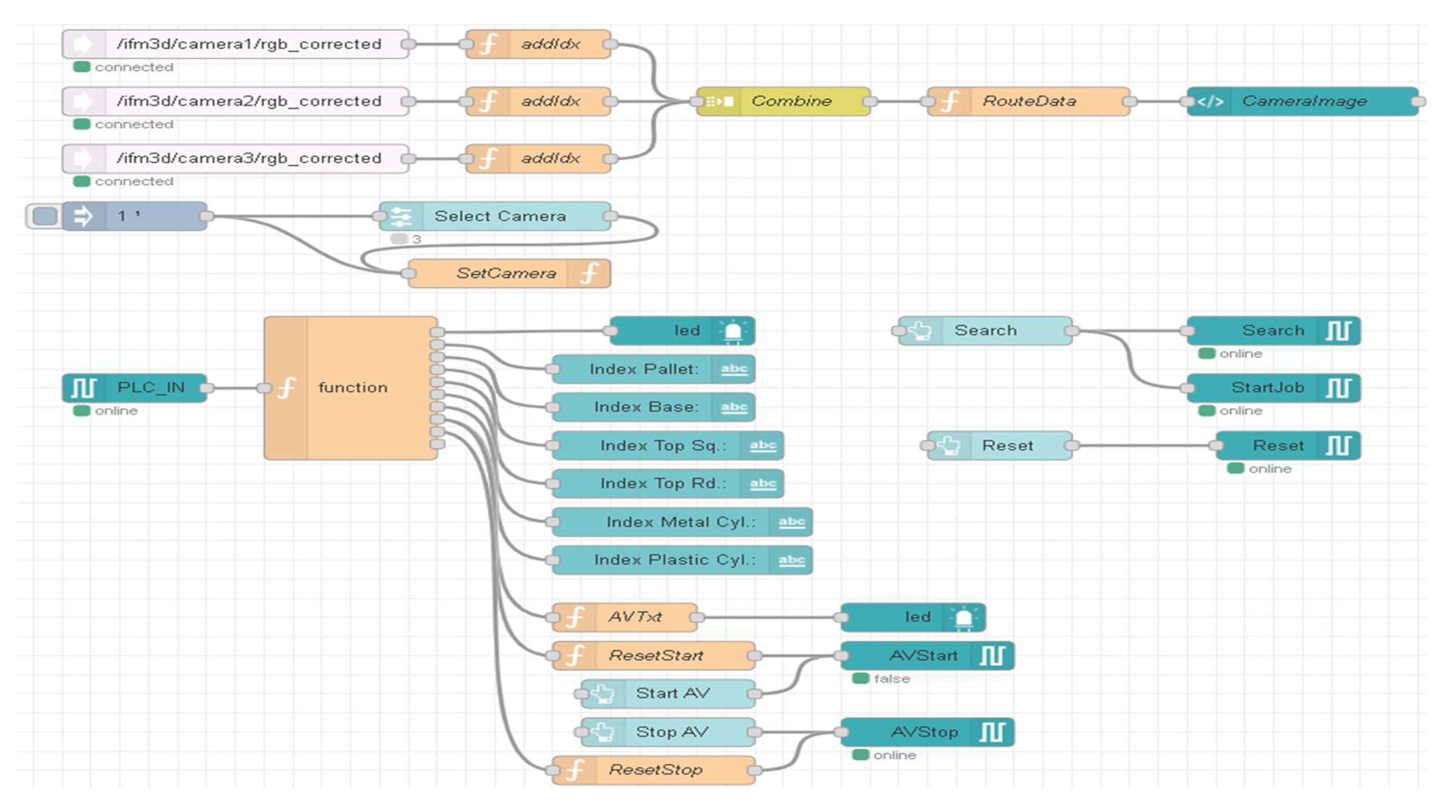
4. IoT-Cloud and VPN Remote Monitoring and Control
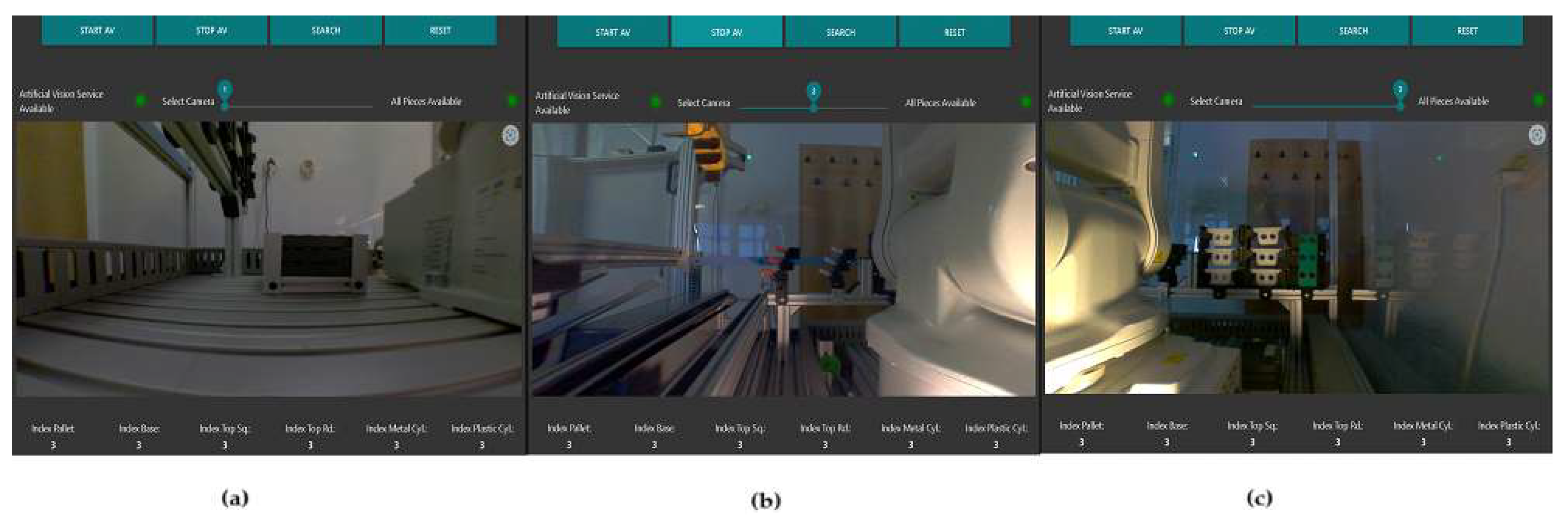
4.1. Remote or Local Initialization and Selection via A/D/R HMIs
4.2. Remote or Local Initialization and Selection via A/D/R HMIs
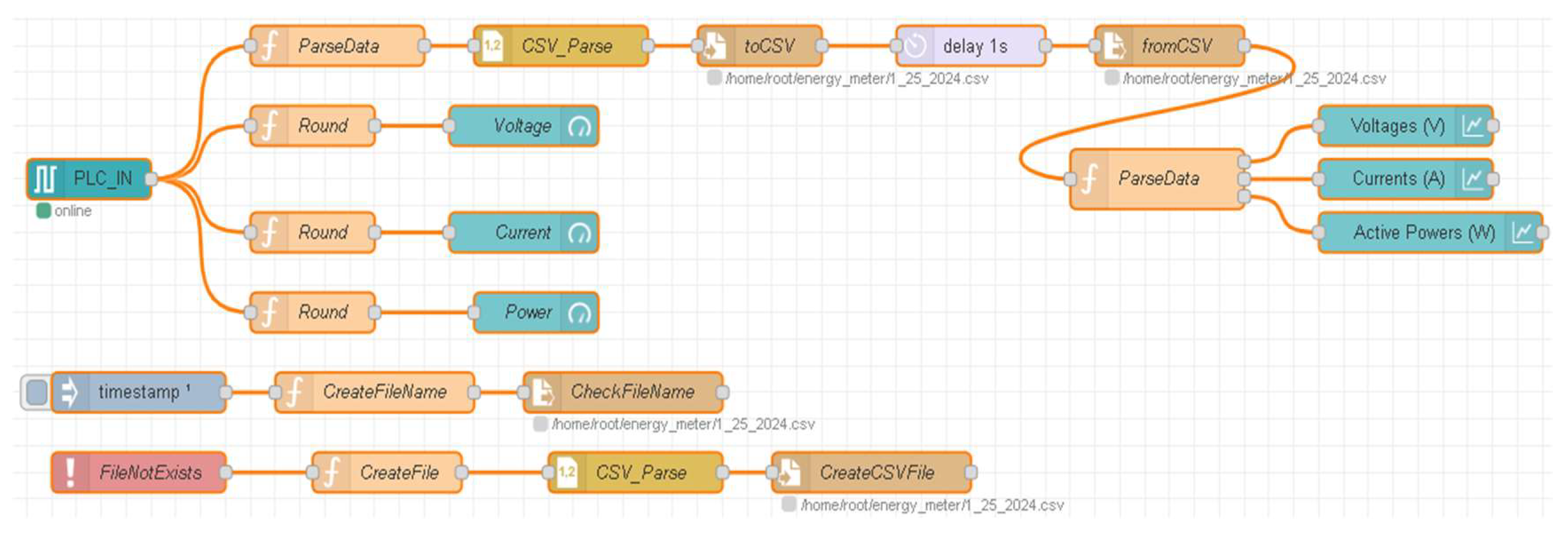
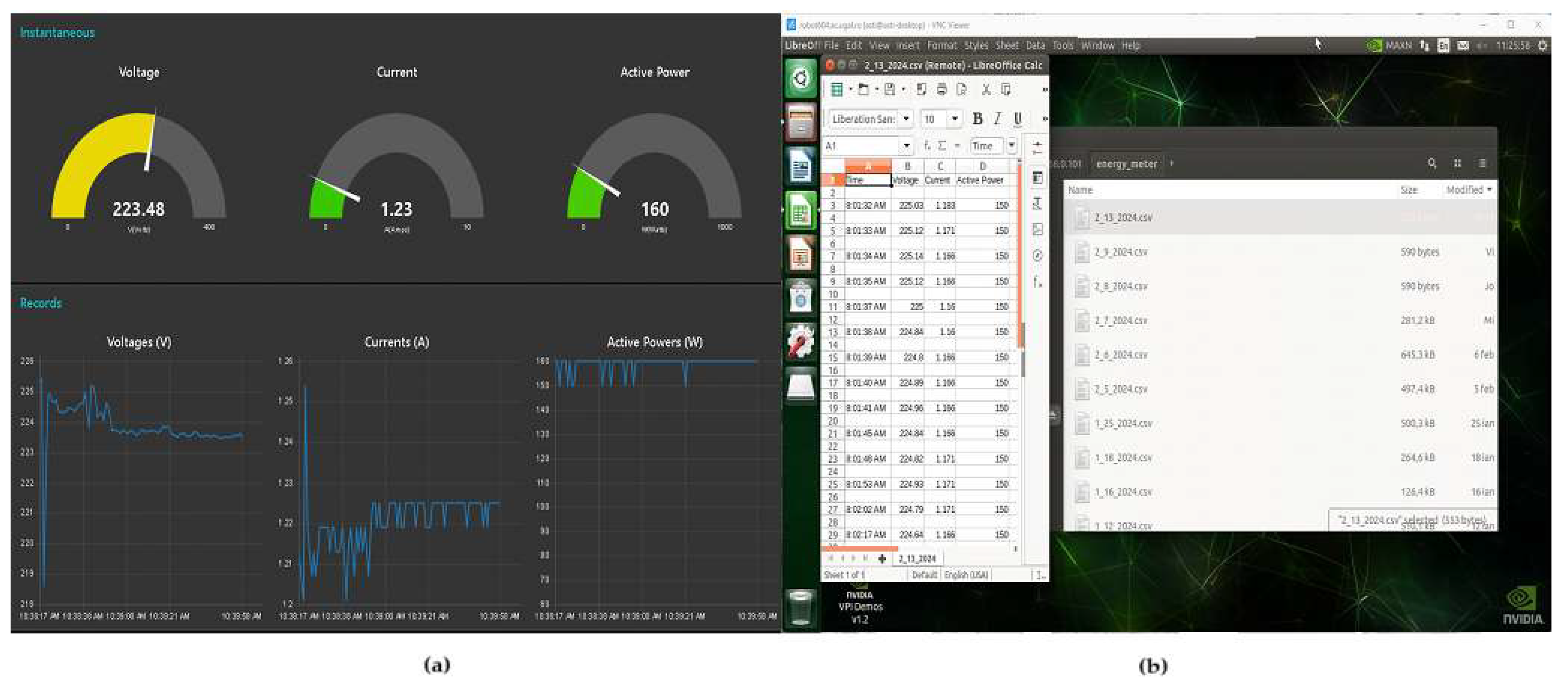
4.3. Cloud and Embedded Computer Based Data Storage and Analytics
4.4. Machine Learning for Adaptive Control, Optimization and Predictive Mainetance
5. Discussion
6. Conclusions
- Multilevel architecture, hardware and software setup,
- DT approach based on AR for task planning and VR with STPN models, formalism and simulation,
- Remote and local HMI, SCADA, OPC-UA and Cloud platform,
- Real-time monitoring and control of A/D/R MRC,
- Electrical data acquisition, remote and local storage for preventive maintenance by adaptive ML,
- Statement the compatibilities of A/D/R MRC with Industry and Education 4.0 and 5.0.
- Integration AI to improve the decision-making process,
- AI-driven predictive analytics for identifying potential issues and optimizing task planning,
- real-time machine learning to adapt control strategies based on the data generated by the MRC,
- AI integration with DT for simulating different operational scenarios and identifying the most efficient workflows.
- Remote learning opportunities where students can interact with the system through AR, VR, and digital twins.
- Hands-on experience with real-world technologies, such as machine learning, SCADA, OPC UA, and IoT, in a controlled laboratory setting.
- Collaborative learning platforms where students can experiment with the system from anywhere, preparing them for the future of smart manufacturing.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guiras, Z.; Turki, S.; Rezg, N.; Dolgui, A. Optimization of Two-Level Disassembly/Remanufacturing/Assembly System with an Integrated Maintenance Strategy. Appl. Sci. 2018, 8, 666. [Google Scholar] [CrossRef]
- Filipescu, A.; Ionescu, D.; Filipescu, A.; Mincă, E.; Simion, G. Multifunctional Technology of Flexible Manufacturing on a Mechatronics Line with IRM and CAS, Ready for Industry 4.0. Processes 2021, 9, 864. [Google Scholar] [CrossRef]
- Ionescu, D.; Filipescu, A.; Simion, G.; Mincă, E.; Cernega, D.; Șolea, R.; Filipescu, A. Communication and Control of an Assembly, Disassembly and Repair Flexible Manufacturing Technology on a Mechatronics Line Assisted by an Autonomous Robotic System. Inventions 2022, 7, 43. [Google Scholar] [CrossRef]
- Chryssolouris, G. Manufacturing Systems—Theory and Practice; Springer: New York, NY, USA, 2005. [Google Scholar]
- Tolio, T. Design of Flexible Production Systems—Methodologies and Tools; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Mincă, E.; Filipescu, A.; Cernega, D.; Șolea, R.; Filipescu, A., Jr.; Ionescu, D.; Simion, G. Digital Twin for a Multifunctional Technology of Flexible Assembly on a Mechatronics Line with Integrated Robotic Systems and Mobile Visual Sensor—Challenges towards Industry 5.0. Sensors 2022, 22, 8153. [Google Scholar] [CrossRef] [PubMed]
- Carlos-Mancilla, M.A.; Luque-Vega, L.F.; Guerrero-Osuna, H.A.; Ornelas-Vargas, G.; Aguilar-Molina, Y.; González-Jiménez, L.E. Educational Mechatronics and Internet of Things: A Case Study on Dynamic Systems Using MEIoT Weather Station. Sensors 2021, 21, 181. [Google Scholar] [CrossRef]
- Florescu, A.; Barabas, S.A. Modeling and Simulation of a Flexible Manufacturing System—A Basic Component of Industry 4.0. Appl. Sci. 2020, 10, 8300. [Google Scholar] [CrossRef]
- Berriche, A.; Mhenni, F.; Mlika, A.; Choley, J.-Y. Towards Model Synchronization for Consistency Management of Mechatronic Systems. Appl. Sci. 2020, 10, 3577. [Google Scholar] [CrossRef]
- Minca, E.; Filipescu, A.; Voda, A. Modelling and control of an assembly/disassembly mechatronics line served by mobile robot with manipulator. Control Eng. Pract. 2014, 31, 50–62. [Google Scholar] [CrossRef]
- Filipescu, A.; Filipescu, A., Jr. , Simulated Hybrid Model of an Autonomous Robotic System Integrated into Assembly/Disassembly Mechatronics Line. IFAC Proc. Vol. 2014, 47, 9223–9228. [Google Scholar] [CrossRef]
- Dragomir, F.; Mincă, E.; Dragomir, O.E.; Filipescu, A. Modelling and Control of Mechatronics Lines Served by Complex Autonomous Systems. Sensors 2019, 19, 3266. [Google Scholar] [CrossRef]
- Filipescu, A.; Mincă, E.; Filipescu, A.; Coandă, H.-G. Manufacturing Technology on a Mechatronics Line Assisted by Autonomous Robotic Systems, Robotic Manipulators and Visual Servoing Systems. Actuators 2020, 9, 127. [Google Scholar] [CrossRef]
- Filipescu, A.; Minca, E.; Filipescu, A. Mechatronics Manufacturing Line with Integrated Autonomous Robots and Visual Servoing Systems. In Proceedings of the 9th IEEE International Conference on Cybernetics and Intelligent Systems, and Robotics, Automation and Mechatronics (CIS-RAM 2019), Bangkok, Thailand, 18–20 November 2019; pp. 620–625. [Google Scholar] [CrossRef]
- Minca, E.; Filipescu, A.; Coanda, H.G.; Dragomir, F.; Dragomir, O.E.; Filipescu, A. Extended Approach for Modeling and Simulation of Mechatronics Lines Served by Collaborative Mobile Robots. In Proceedings of the 22nd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 10–12 October 2018; pp. 335–341. [Google Scholar]
- Segovia, M.; Garcia-Alfaro, J. Design, Modeling and Implementation of Digital Twins. Sensors 2022, 22, 5396. [Google Scholar] [CrossRef] [PubMed]
- Moiceanu, G.; Paraschiv, G. Digital Twin and Smart Manufacturing in Industries: A Bibliometric Analysis with a Focus on Industry 4. 0. Sensors 2022, 22, 1388. [Google Scholar] [CrossRef] [PubMed]
- Filipescu, A.; Cernega, D.; Solea, R.; Filipescu, A.; Minca, E.; Ionescu, D.; Simion, G. Modeling and Control an A/DT Served by an ACPS based on SCADA, Industry 4.0 and 5.0. 28th IEEE International Conference on Emerging Technologies and Factory Automation, ETFA 2023, ISSN: 1946-0759. Sinaia, 12-15 September 2023; 15 September 2023. [Google Scholar] [CrossRef]
- Filipescu, A.; Simion, G.; Ionescu, D.; Filipescu, A. Remote Control of a Flexible Robotic Cell as a Cyber Physical System for Assembly and Disassembly based on SCADA and Industry 4.0. The 32nd Mediterranean Conference on Control and Automation, Chania, Crete, Greece, 11–14 June 2024. [Google Scholar] [CrossRef]
- Filipescu, A.; Stamatescu, I.; Simion, G.; Ionescu, D.; Filipescu, A. IoT-Cloud based Control of a Flexible Assembly/Disassembly Mechatronic System in the Framework of Industries 4.0 and 5.0. IEEE 18th International Conference on Control & Automation (ICCA), Reykjavík, Iceland, 18-21 June 2024. [Google Scholar] [CrossRef]
- Martinez, E.M.; Ponce, P.; Macias, I.; Molina, A. Automation Pyramid as Constructor for a Complete Digital Twin, Case Study: A Didactic Manufacturing System. Sensors 2021, 21, 4656. [Google Scholar] [CrossRef] [PubMed]
- Bamunuarachchi, D.; Georgakopoulos, D.; Banerjee, A.; Jayaraman, P.P. Digital Twins Supporting Efficient Digital Industrial Transformation. Sensors 2021, 21, 6829. [Google Scholar] [CrossRef]
- Vachálek, J.; Šišmišová, D.; Vašek, P.; Fiťka, I.; Slovák, J.; Šimovec, M. Design and Implementation of Universal Cyber-Physical Model for Testing Logistic Control Algorithms of Production Line’s Digital Twin by Using Color Sensor. Sensors 2021, 21, 1842. [Google Scholar] [CrossRef]
- Gallala, A.; Kumar, A.A.; Hichri, B.; Plapper, P. Digital Twin for Human–Robot Interactions by Means of Industry 4.0 Enabling Technologies. Sensors 2022, 22, 4950. [Google Scholar] [CrossRef]
- Stączek, P.; Pizoń, J.; Danilczuk, W.; Gola, A. A Digital Twin Approach for the Improvement of an Autonomous Mobile Robots (AMR’s) Operating Environment—A Case Study. Sensors 2021, 21, 7830. [Google Scholar] [CrossRef]
- Abdul Hadi, M.; Kraus, D.; Kajmakovic, A.; Suschnigg, J.; Guiza, O.; Gashi, M.; Sopidis, G.; Vukovic, M.; Milenkovic, K.; Haslgruebler, M.; et al. Towards Flexible and Cognitive Production—Addressing the Production Challenges. Appl. Sci. 2022, 12, 8696. [Google Scholar] [CrossRef]
- Angelopoulos, J.; Mourtzis, D. An Intelligent Product Service System for Adaptive Maintenance of Engineered-to-Order Manufacturing Equipment Assisted by Augmented Reality. Appl. Sci. 2022, 12, 5349. [Google Scholar] [CrossRef]
- Mourtzis, D.; Angelopoulos, J.; Panopoulos, N. A Literature Review of the Challenges and Opportunities of the Transition from Industry 4.0 to Society 5.0. Energies 2022, 15, 6276. [Google Scholar] [CrossRef]
- Zizic, M.C.; Mladineo, M.; Gjeldum, N.; Celent, L. From Industry 4.0 towards Industry 5.0: A Review and Analysis of Paradigm Shift for the People, Organization and Technology. Energies 2022, 15, 5221. [Google Scholar] [CrossRef]
- Nahavandi, S. Industry 5.0—A Human-Centric Solution. Sustainability 2019, 11, 4371. [Google Scholar] [CrossRef]
- Radaschin, A.; Voda, A.; Minca, E.; Filipescu, A. Task Planning Algorithm in Hybrid Assembly/Disassembly Process. In Proceedings of the 14th IFAC Symposium on Information Control Problems in Manufacturing, Bucharest, Romania, 23–25 May 2012. [Google Scholar]
- Kallrath, J. Planning and scheduling in the process industry. In Advance Planning and Scheduling Solution in Process Industry; Springer: Berlin/Heidelberg, Germany, 2003; pp. 201–227. [Google Scholar]
- He, Y.; Stecke, K.E.; Smith, M.L. ; Robot and machine scheduling with state-dependent part input sequencing in flexible manufacturing systems. Int. J. Prod. Res. 2016, 54, 6736–6746. [Google Scholar] [CrossRef]
- Barczak, A.; Dembińska, I.; Marzantowicz, Ł. Analysis of the Risk Impact of Implementing Digital Innovations for Logistics Management. Processes 2019, 7, 815. [Google Scholar] [CrossRef]
- Gasparetto, A.; Zanotto, V. A new method for smooth trajectory planning of robot manipulators. Mech. Mach. Theory 2007, 42, 455–471. [Google Scholar] [CrossRef]
- Node-RED web-based flow editor for remote control, Node-RED 4.0 released - News - Node-RED Forum (nodered.org) (accessed on 24 October 2024).
- Sirphyco Simulateur de Réseaux de Petri, Sirphyco-Simulateur-de-Reseaux-de-Petri. Available online: Toucharger.com (accessed on 11 October 2024).
- Mathworks. Available online: https://www.mathworks.com (accessed on 11 October 2024).
- Totally Integrated Automation Portal, TIA Portal V17, Available online:. Available online: www.siemens.com/tia-portal (accessed on 11 October 2024).
- OpenCV. Available online: https://opencv.org (accessed on 11 October 2024).
- Microsoft Visual Studio. Available online: https://www.visualstudio.com/vs/cplusplus (accessed on 11October 2024).
- SCADA System SIMATIC, WinCC SIMATIC WinCC V7 / V8 - Siemens Xcelerator Global. (accessed on 11 October 2024). (accessed on null).
- VNC (Virtual Network Computing), RealVNC® - Remote access software fo r desktop and mobile | RealVNC. (accessed on 11 October 2024). (accessed on null).
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



