Submitted:
03 September 2024
Posted:
04 September 2024
Read the latest preprint version here
Abstract
Suppose n ∈ N. We wish to meaningfully average ‘sophisticated’ unbounded sets (i.e., sets with positive n-d Hausdorff measure, in any n-d box of the n-d plane, where the measures don’t equal the area of the boxes). We do this by taking the most generalized, satisfying extension of the expected value, w.r.t the Hausdorff measure in its dimension, on bounded sets which takes finite values only. As of now, I’m unable to solve this due to limited knowledge of advanced math and most people are too busy to help. Therefore, I’m wondering if anyone knows a research paper which solves my doubts.
Keywords:
Expected Values
; Sets
; Hausdorff measure
; Hausdorff dimension
; Discretization
; Segmentation
; Partitions
; Samples
; Euclidean Distance
; Choice Function
1. Intro
Let . Suppose is Borel and is the set of all unbounded A. Also, is the Hausdorff dimension and is the Hausdorff measure in its dimension on the Borel -algebra.
1.1. Special case of A
Suppose the n-dimensional box is B. How do we define explicit A, such that:
- for all B
- for all B?
This case of A is called .
1.2. Attempting to Analyze/Average A
The expected value of A, w.r.t the Hausdorff measure in its dimension, is:
Nevertheless, we have the following problems:
Note 2. (Problem 2) When is the set of all A with a finite , where the cardinality is , (i.e., is “measure zero" in)
We fix both problems using this approach, where we discuss the term “satisfying" later:
1.2.1. Approach
We want an unique, satisfying extension of the expected value of A, w.r.t the Hausdorff measure in its dimension, on bounded sets to A, which takes finite values only, such that when is the set of all A with this extension:
- (i.e., is “almost everywhere" in )
- If (1) isn’t true, then
1.3. Question
Is there a unique way to define “satisfying" & “extension" in the approach, which solves Problems 1 and 2 with applications?
For an example, keep reading.
2. Extending the Expected Value of A w.r.t the Hausdorff Measure
The following are two methods to finding the most generalized, satisfying extension of in eq. 1 which we later use to answer §1.3:
- One way is defining a generalized, satisfying extension of the Hausdorff measure, on all A with positive & finite measure which takes positive, finite values for all Borel A. This can theoretically be done in the paper “A Multi-Fractal Formalism for New General Fractal Measures"[1], where in Equation (1) we replace the Hausdorff measure with the extended Hausdorff measure.
- Another way is finding generalized, satisfying average of all A in the fractal setting. This can be done with the papers “Analogues of the Lebesgue Density Theorem for Fractal Sets of Reals and Integers" [2] and “Ratio Geometry, Rigidity and the Scenery Process for Hyperbolic Cantor Sets" [3] where we take the expected value of A w.r.t the densities in [2,3].
3. Attempt to Define “Unique and Satisfying" in The Approach of §1.2
3.1. Note
3.2. Leading Question
To define unique and satisfying inside the approach of §1.2, we take the expected value of a sequence of bounded sets chosen by a choice function. To find the choice function, we ask the leading question...
If we make sure to:
- (A)
- See §3.1 and (C)-(E) when something is unclear
- (B)
- Take all sequences of bounded sets whose “set theoretic limit" is A
- (C)
- Define C to be chosen center point of
- (D)
- Define E to be the chosen, fixed rate of expansion of a sequence of bounded sets
- (E)
- Define to be actual rate of expansion of a sequence of bounded sets (§5.5)
Does there exist a unique choice function which chooses the set of all equivalent sequences of bounded sets where:
- The chosen, equivelant sequences of bounded sets should satisfy (B).
- The “measure" of all the chosen, equivalent sequences of bounded sets which satisfy (1) should increase at a rate linear or superlinear to that of non-equivalent sequences of bounded sets satisfying (B).
- The expected values, defined in the papers of §2, for all equivalent sequences of bounded sets are equivalent and finite
-
For the chosen, equivalent sequences of bounded sets satisfying (1)–(3).
- The n-d Euclidean distance between criteria (3) and C is the less than or equal to that of all the non-equivalent sequences of bounded sets satisfying (1)–(3)
- The “rate of divergence" [4, p.275-322] of , using the absolute value , is less than or equal to that of all the non-equivalent sequences of bounded sets which satisfy (1)–(3)
-
When set is the set of all A, where the choice function chooses the set of all equivalent sequences of bounded sets satisfying (1)–(4), then:
- When , then
- Out of all choice functions which satisfy (1)–(5) we choose the one with the simplest form, meaning for each choice function fully expanded, we take the one with the fewest variables/numbers?
(In case this is unclear, see §5.)
I’m convinced the expected values of the sequences of bounded sets chosen by a choice function which answers the leading question aren’t unique nor satisfying enough to answer Problems 1 and 2. Still, adjustments are possible by changing the criteria or by adding new criteria to the question.
4. Question Regarding My Work
Most don’t have time to address everything in my research, hence I ask the following:
Is there a research paper which already solves the ideas I’m working on? (Non-published papers, such as mine [5], don’t count.)
Using AI, papers that might answer this question are “Prediction of dynamical systems from time-delayed measurements with self-intersections" [6] and “A Hausdorff measure boundary element method for acoustic scattering by fractal screens" [7].
Does either of these papers solve Problems 1 and 2 with applications?
5. Clarifying §3
Let be an unbounded, Borel set. Suppose be the Hausdorff dimension and be the Hausdorff measure in its dimension on the Borel -algebra. See §3.2, once reading this section, and consider the following:
Is there a simpler version of the definitions below?
5.1. Set Theoretic Limit of a Sequence of Bounded Sets
Note the set theoretic limit of a sequence of sets of bounded set is A when:
where:
5.2. Expected Value of Bounded Sequences of Sets
If is a sequence of bounded sets whose set-theoretic limit is A (§5.1), the expected value of A w.r.t is (when it exists) where:
Note, can be extended by using §2.
5.3. Defining Equivelant and Non-Equivelant Sequences of Bounded Functions
Thus, we define:
Definition 1.
[Equivelant Sequences of Bounded Sets] Suppose, is an arbitrary set. Note, the sequences of bounded sets in:
are equivalent, if for all , where , and are equivelant: i.e., there exists a , such for all , there is a , where:
and for all
, there is a
, where:
More, for each
, we denote all equivalent sequences of bounded functions to
using the notation
If the sequence of sets in:
are equivalent, then for all , where :
Note, this explains criteria (3) in §3.
Definition 2.
[Non-Equivalent Sequences of Bounded Sets] Again, suppose is an arbitrary set. Then, the sequences of bounded sets in:
are non-equivalent, if Definition 1 is false, meaning for some , where , and are non-equivelant: there is a , where for all , there is either a , where:
or for all
, there is a
, where
5.4. Defining the “Measure"
5.4.1. Preliminaries
We define the “measure" of in §5.4.2. To understand this “measure", keep reading. (In case the steps are unclear, see §8 for examples.)
- For every , “over-cover" with minimal, pairwise disjoint sets of equal measure. (We denote the equal measures , where the former sentence is defined : i.e., enumerates all collections of these sets covering . In case this step is unclear, see §8.1.)
- For every , r and , take a sample point from each set in . The set of these points is “the sample" which we define : i.e., enumerates all possible samples of . (In the case this is unclear, see §8.2.)
-
For every , r, and ,
- (a)
- Take a “pathway” of line segments: we start with a line segment from arbitrary point of to the sample point with smallest n-dimensional Euclidean distance to (i.e., when more than one sample point has smallest n-dimensional Euclidean distance to , take either of those points). Next, repeat this process until the “pathway” intersects with every sample point once. (If this is unclear, see §8.3.1.)
- (b)
- (c)
- Multiply remaining lengths in the pathway by a constant so they add up to one (i.e., a probability distribution). This will be denoted . (In case this step is unclear, see §8.3.3.)
- (d)
- (e)
- Maximize the entropy w.r.t all "pathways". This we will denote:
(In case this step is unclear, see §8.3.5.) - Therefore, the maximum entropy of w.r.t , using (1) and (2) is:
5.4.2. What Am I Measuring?
Suppose we define two sequences of bounded functions which have a set theoretic limit of A: e.g., and , where for constant and cardinality
- (a)
- (b)
- If using and we have:then what I’m measuring from increases at a rate superlinear to that of .
- If using equations and (where we swap and , in and , with and ) we get:then what I’m measuring from increases at a rate sublinear to that of .
-
If using equations , , , and , we both have:
- (a)
- or does not equal zero
- (b)
- or does not equal zero
then what I’m measuring from increases at a rate linear to that of .
5.5. Defining The Actual Rate of Expansion of Sequence of Bounded Sets
5.5.1. Definition of Actual Rate of Expansion of Sequence of Bounded Sets
Suppose is a bounded sequence of subsets of , and is the Euclidean distance between points . Therefore, using the “chosen" center point , when:
the actual rate of expansion is:
Note, there are cases of when isn’t fixed and (i.e., the chosen, fixed rate of expansion).
5.6. Reminder
See if §3.2 is easier to understand?
6. My Attempt At Answering The Approach of §1.2
6.1. Choice Function
Suppose we define the following:
- is the sequence of bounded sets satisfying (1)–(5) of the leading question in §3.2
- is all sequences of bounded sets which satisfy (1) and (2) of the leading question
- but not in the set of equivelant sequences of bounded sets to . Note, using the end of Definition 1, we represent this criteria as:
6.2. Approach
6.3. Potential Answer
6.3.1. Preliminaries (Infimum and Supremum of n-dimensional sets Using a Partial Order)
Define the supremum of an n-dimensional set using the partial order , when , , , and define the infimum of an n-dimensional set using the partial order , when , ,.
Example 1.
If
and
, then
and
Suppose, the geometric mean of point is:
Thus, using the inf and sup of n-dim. sets in §6.3.1 and the “chosen" center point , when we define
and use , , , E, (§5.5), and , such that with the absolute value function and nearest integer function , we define:
The choice function, which answers the leading question in §3.2, could be the following:
7. Questions
8. Appendix of §5.4.1
8.1. Example of §5.4.1, step 1
Suppose
Then one example of , using §5.4.1 step 1, (where ) is:
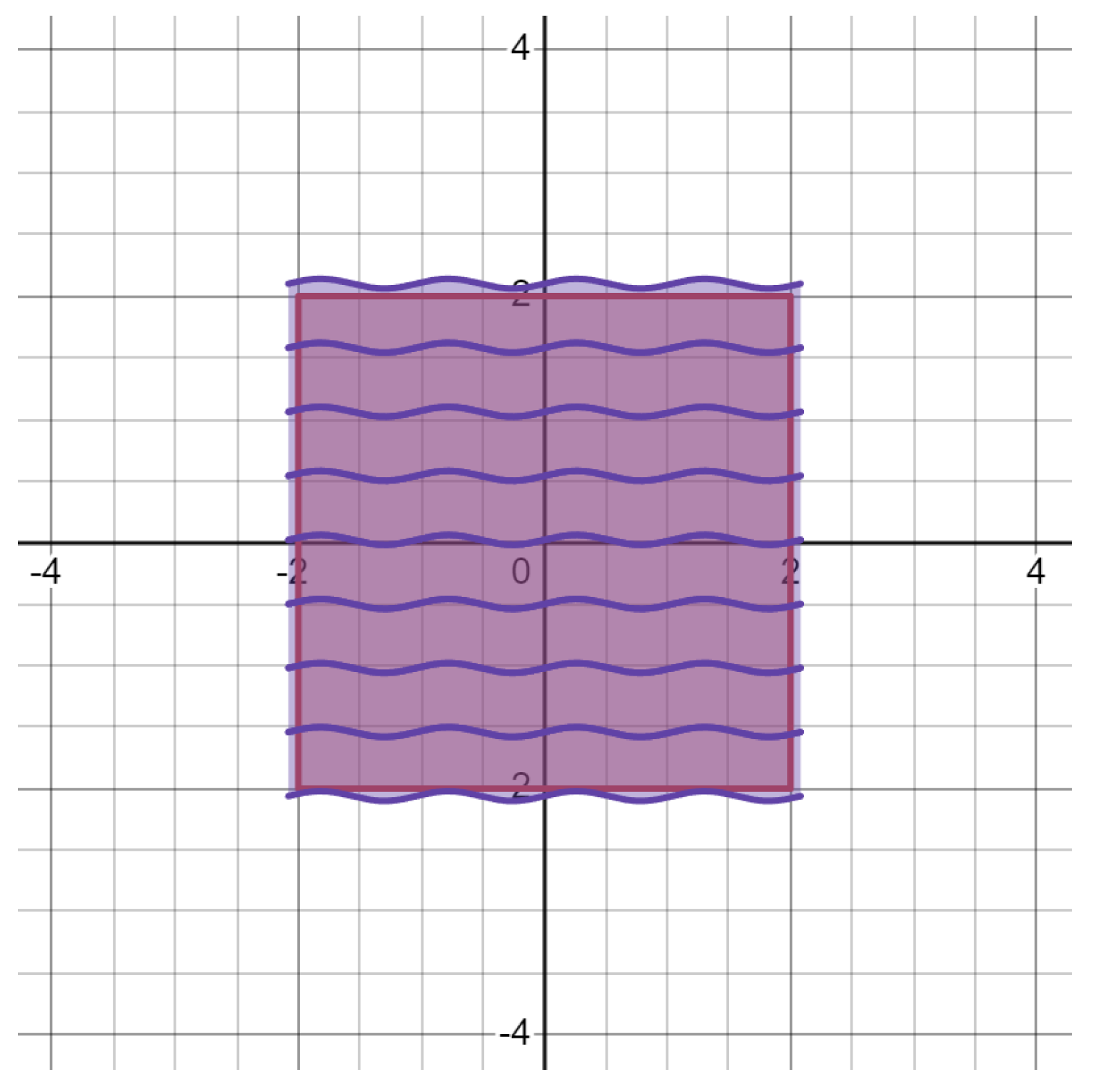
Note, the area of each of the rectangles is , where the borders could be approximated as:
and we’ll illustrate this as purple rectangles covering (i.e., the red square).
(Note, the purple rectangles in Figure 1, satisfy step (1) of §5.4.1, since the Hausdorff measures in its dimension of the rectangles is and there is a minimum 8 covers over-covering : i.e.,
Definition 3.
[Minimum Covers of Measure covering ] We can compute the minimum covers , using the formula:
where )
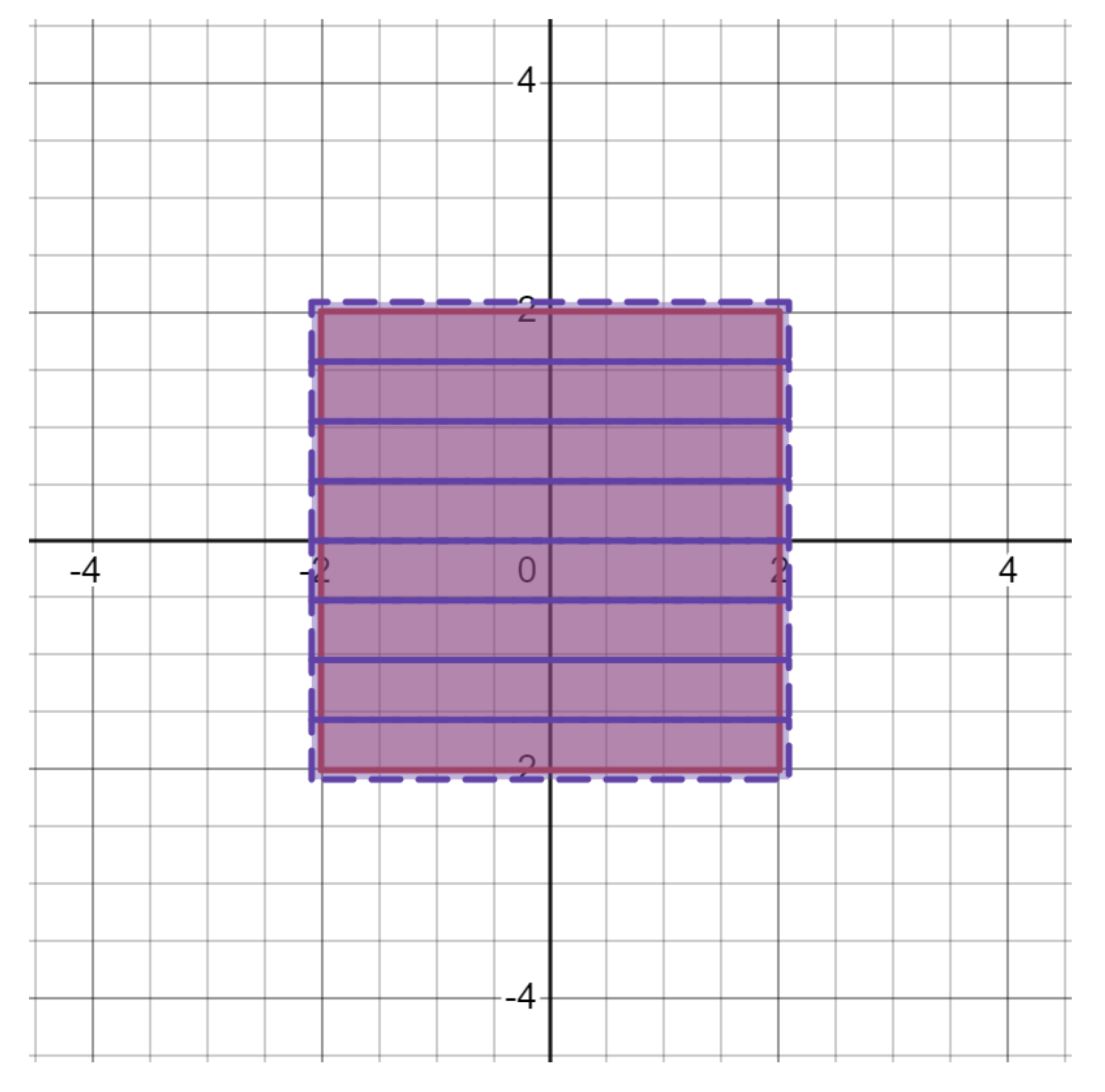
Note the covers in need not be rectangles. In fact, they could be any set as long as the “area" of those sets is , and is over-covered by the smallest number of sets possible. Here is an example:
Figure 2.
The eight purple sets are the “covers" and the red square is . (Ignore the boundaries)
To define this cover, start off with:
Then, for each in , we define:
except where:
such that an example of is:
In the case of , there are uncountably many of different shapes and sizes which we can use. However, these examples were the ones taken.
8.2. Example of §5.4.1, step 2
Suppose
Then, an example of is:
Below, is an illustration of the sample: i.e., the set of all black points in each purple rectangle of covering :
Figure 3.
The black points are the “sample points", the eight purple rectangles are the “covers", and the red square is . (Ignore the boundaries)
Figure 3.
The black points are the “sample points", the eight purple rectangles are the “covers", and the red square is . (Ignore the boundaries)
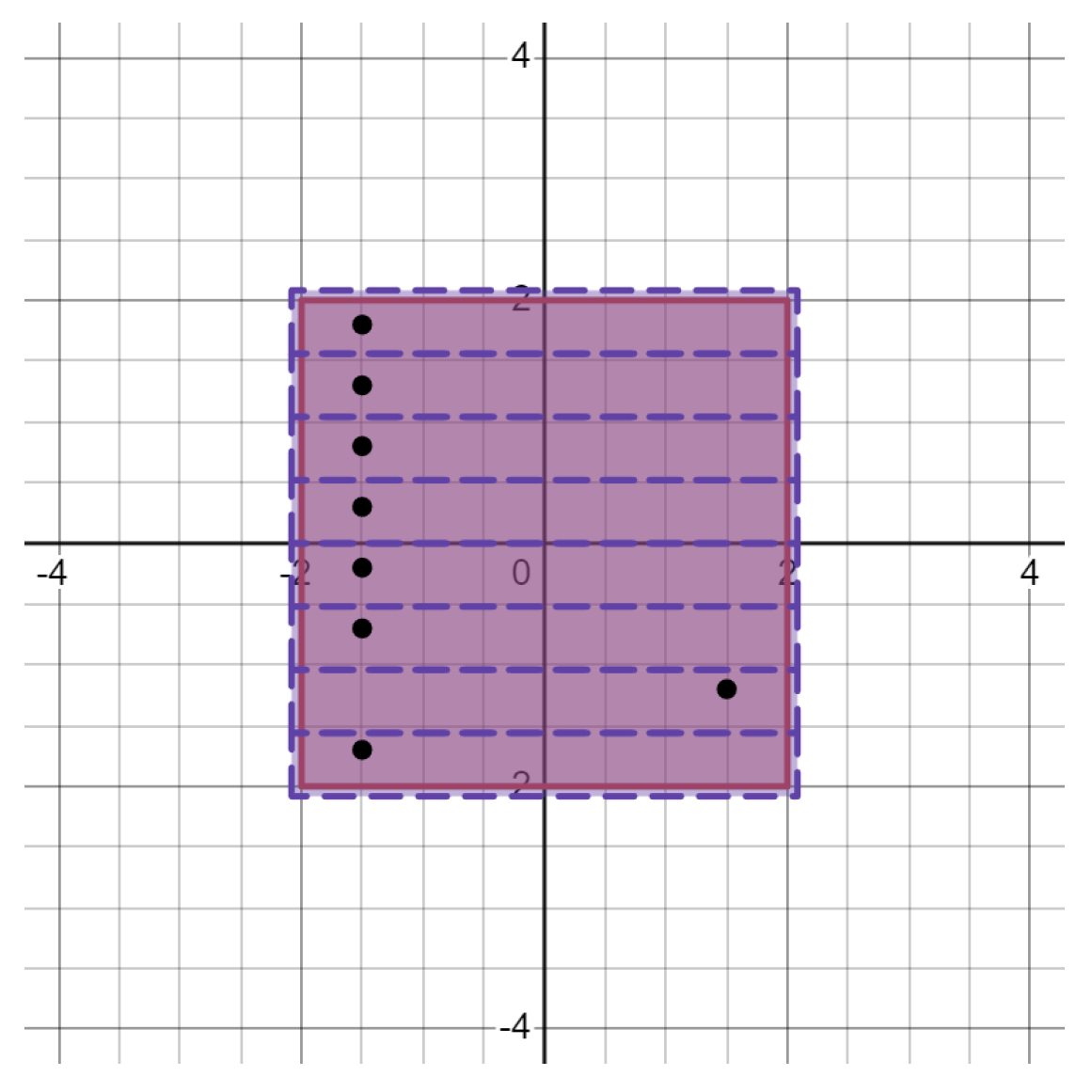
Note there are multiple samples we can take, as long as one sample point is taken from each cover in .
8.3. Example of §5.4.1, step 3
Suppose
Therefore, consider the following process:
8.3.1. Step 33a
If is:
suppose . Note, the following:
- is the next point in the “pathway" since it’s a point in with the smallest 2-d Euclidean distance to instead of .
- is the third point since it’s a point in with the smallest 2-d Euclidean distance to instead of and .
- is the fourth point since it’s a point in with the smallest 2-d Euclidean distance to instead of , , and .
- we continue this process, where the “pathway" of is:
Note 3. If more than one point has the minimum 2-d Euclidean distance from , , , etc. take all potential pathways: e.g., using the sample in Equation (30), if , then since and have the smallest Euclidean distance from , and for point , since and have the smallest Euclidean distance from , we take three pathways:
8.3.2. Step 33b
Take the length of all line segments in the pathway. In other words, suppose is the n-th dim.Euclidean distance between points . Using the pathway of eq. 31, we want:
Whose distances can be approximated as:
As we can see, the outlier [8] is (i.e., note these outliers become more prominent for ). Therefore, remove from the set of distances:
which we can illustrate with:
Figure 4.
is the start point in the pathway. The black line segments in the “pathway" have lengths which aren’t outliers. The length of the red line segment is an outlier.
Figure 4.
is the start point in the pathway. The black line segments in the “pathway" have lengths which aren’t outliers. The length of the red line segment is an outlier.
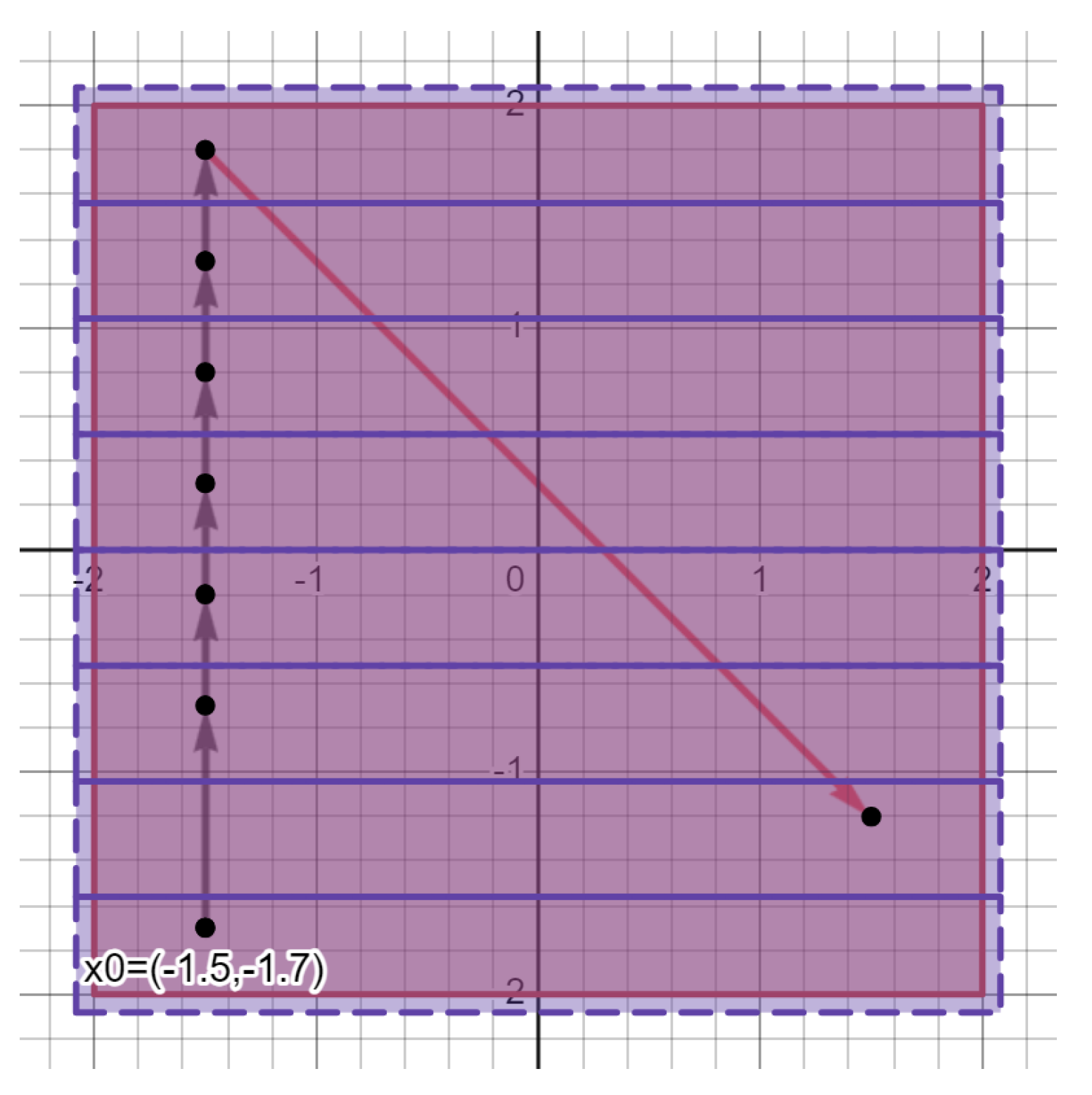
Hence, when , using §5.4.1 step 33b & Equation (30, we note:
8.3.3. Step 33c
To convert the set of distances in Equation (34) into a probability distribution, we take:
Then divide each element in by 3.5
which gives us the probability distribution:
Hence,
8.3.4. Step 33d
Take the shannon entropy of Equation (36):
We shorten to , giving us:
8.3.5. Step 33e
Take the entropy w.r.t all pathways of:
In other words, we’ll compute:
We do this by repeating §8.3.1-§8.3.4 for different (i.e., in the equations with multiple values, see Note 5)
Hence, since the largest value out of Equations (38)–(45) is 2.52164:
References
- Achour, R.; Li, Z.; Selmi, B.; Wang, T. A multifractal formalism for new general fractal measures. Chaos, Solitons & Fractals 2024, 181, 114655. [Google Scholar]
- Bedford, T.; Fisher, A.M. Analogues of the Lebesgue density theorem for fractal sets of reals and integers. Proceedings of the London Mathematical Society 1992, 3, 95–124. [Google Scholar] [CrossRef]
- Bedford, T.; Fisher, A.M. Ratio geometry, rigidity and the scenery process for hyperbolic Cantor sets. Ergodic Theory and Dynamical Systems 1997, 17, 531–564. [Google Scholar] [CrossRef]
- Sipser, M. Introduction to the Theory of Computation, 3 ed.; Cengage Learning, 2012; pp. 275–322. [Google Scholar]
- Krishnan, B. Bharath Krishnan’s ResearchGate Profile. https://www.researchgate.net/profile/Bharath-Krishnan-4.
- Barański, K.; Gutman, Y.; Śpiewak, A. Prediction of dynamical systems from time-delayed measurements with self-intersections. Journal de Mathématiques Pures et Appliquées 2024, 186, 103–149. [Google Scholar] [CrossRef]
- Caetano, A.M.; Chandler-Wilde, S.N.; Gibbs, A.; Hewett, D.P.; Moiola, A. A Hausdorff-measure boundary element method for acoustic scattering by fractal screens. Numerische Mathematik 2024, 156, 463–532. [Google Scholar] [CrossRef]
- John, R. Outlier. https://en.m.wikipedia.org/wiki/Outlier.
- M., G. Entropy and Information Theory, 2 ed.; Springer New York: New York [America];, 2011; pp. 61–95. https://ee.stanford.edu/~gray/it.pdf. [CrossRef]
Figure 1.
Purple rectangles are the “covers" and the red square is . (Ignore the boundaries)
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



