Submitted:
01 July 2024
Posted:
02 July 2024
You are already at the latest version
Abstract
This research aims to apply Artificial Intelligence (AI) methods, specifically Artificial Immune Systems (AIS), to design an optimal control strategy for a multivariable control plant. Two specific industrial control approaches are investigated: I-PD (Integral-Proportional Derivative) and PI-D (Proportional-Integral Derivative) control. The motivation for using these variations of PID controllers is that they are functionally implemented in modern industrial controllers, where they provide precise process control. The research results in a novel solution to the control synthesis problem for the industrial system. In particular, the research deals with the synthesis of I-P control for a two-loop system in the technological process of a distillation column. This synthesis is carried out using the AIS algorithm, which is the first application of this technique in this specific context. Methodological approaches are proposed to improve the performance of industrial multivariable control systems by effectively using optimization algorithms and establishing modified quality criteria. The numerical performance index ISE justifies the effectiveness of the AIS-based controllers in comparison with conventional PID controllers (ISE1 = 1.865, ISE2 = 1.56). The problem of synthesis of the multi-input multi-output (MIMO) control system is solved, considering the interconnections due to the decoupling procedure.
Keywords:
optimal design
; I-PD controller
; PI-D controller
; artificial intelligence algorithm
; artificial immune system
; industrial applications
; multivariable systems
1. Introduction
The optimal synthesis of I-PD (Integral-Proportional Derivative) and PI-D (Proportional-Integral Derivative) industrial controllers is connected with the development of effective process control systems [1]. At present, the synthesis of only PID controllers is well developed. The process of developing and implementing optimal I-PD and PI-D controllers can lead to improvements in the accuracy and performance of control systems, which is important for various industrial and technical applications. The development of efficient optimization algorithms used in optimal I-PD and PI-D controllers is important to research.
Efficiency and practical realization in real industrial control systems are the reasons for using I-PD and PI-D controllers for the MIMO system in this research. I-PD and PI-D controllers provide improved control by separately affecting proportional, integral, and differential components, allowing for finer tuning of the system to achieve an optimal balance between responsiveness and stability. These controllers are also easier to tune and apply compared to more complex methods, making them preferred for many industrial and engineering applications where reliability and technical feasibility are important [2].
Technological processes are characterized by multivariable complexity, large amounts of data, and the use of microprocessor technologies [3]. Using the latest advances in AI can significantly improve optimal control algorithms for MIMO control systems. These algorithms can be used to tune the parameters of I-PD and PI-D controllers to achieve optimal results according to specific performance criteria or given requirements.
Artificial intelligence algorithms such as artificial immune systems (AIS), genetic algorithms (GA), particle swarm (PSO), or optimization algorithms using artificial neural networks can work with a variety of criteria, which allows you to adjust the controls taking into account several aspects of performance [4,5]. In particular, artificial immune systems (AIS) are based on a natural immune system with the ability to learn and adapt to changing conditions. This property gives an advantage to AIS algorithms over other AI algorithms.
The primary objective of this research is to develop more efficient methods for tuning I-PD and PI-D controllers of multivariable industrial systems through the use of AI algorithms such as the AIS algorithm.
In this article, the following research questions are considered. Development of an optimal controller using AIS technology. Transformation of the performance criterion for the successful configuration of I-PD and P-ID controllers using intelligent algorithms. Design AIS algorithm to tune the parameters of I-PD and P-ID optimal controllers. Application of this algorithm to industrial processes in oil and gas MIMO systems. Obtaining results from the comparison analysis of different controllers. Evaluating the effectiveness of AIS algorithms for distillation column control systems in the oil and gas industry.
The successful integration of industrial artificial intelligence has become an important factor, especially within multivariable sectors like the oil and gas industry [6,7]. The proposed approach involves the development of more efficient intelligent algorithms based on artificial immune systems for the optimal control of multivariable industrial processes in the oil and gas industry. Research on applying AIS for tuning controllers of multivariable systems has the potential to bring significant benefits to both the industry and the academic community, contributing to increased efficiency and automation of control processes.
The structure of the paper is organized as follows. Section 1 provides an overview of the research questions and objectives of the present study. Section 2 examines previous studies on AI technology and PID controllers. Section 3 describes the AIS algorithm for industrial controllers. Section 4 introduces the mathematical model of a MIMO distillation column process control system and details the findings and results of the optimal design of controllers for the distillation column. Section 5 discusses the results obtained. Section 6 concludes the paper and identifies avenues for future exploration.
2. Literature Review
Among the promising frontiers for artificial intelligence in the oil and gas sector, modeling and optimizing various processes hold significant potential [8]. This involves employing artificial intelligence to control technological processes, including the pursuit of optimal solutions. Achieving these objectives involves harnessing artificial intelligence optimization algorithms, which are extensively documented in contemporary literature [9]. Intelligent algorithms such as the Dragonfly Algorithm (DA) [10], Genetic Algorithm (GA), Ant Colony Optimization (ACO) [11], Particle Swarm Algorithm (PSA) [12], and Cuckoo Search (CS) [13] have been successfully applied to synthesizing optimal controllers for automatic control systems.
These intelligent algorithms encompass a wide spectrum of capabilities, each with its own advantages and limitations. Their selection should be contextually driven by factors like the specific oil and gas industry process, desired system dynamics and quality, and the optimization problem at hand. For instance, these algorithms are adept at parametrically tuning standard PID controllers to synthesize optimal controls aimed at minimizing selected performance criteria.
Although AI algorithms have been widely used to tune PID controllers in single-input, single-output (SISO) systems, there is particular interest in using AI techniques to fine-tune variable-structure controllers, including I-PD, PD-PI, and PI-D. Methods for synthesizing I-PD and PD-PI controllers have emerged using intelligent techniques such as Particle Swarm Optimization (PSO) [14], Cuckoo Search (CS) [15], and Swarm Intelligence [16].
Among the array of algorithms, the artificial immune system (AIS) algorithms have demonstrated notable efficacy in intelligent PID-controller adjustment [17,18]. These algorithms, which are based on the clonal selection principle, exhibit several distinctive characteristics, including accuracy calculations, convergence rate, and robustness in situations where information about the plant under control is incomplete [19,20]. Notably, the AES algorithm excels in discovering global optimal solutions, outperforming conventional tuning methods in metrics like rise time, control time, steady-state tracking error, and overshoot [21]. This effectiveness has been demonstrated for SISO systems and is even more important for MIMO systems [22].
Currently, various variants of PID controllers have been developed that significantly extend the capabilities of classical control systems. One such variant is the fractional integral PID controller (FOPID), which uses fractional orders of integration and differentiation [23]. This allows for more flexible system tuning and improved dynamic performance [24].
The sigmoid PID is another variation that is characterized by the use of a sigmoid function to control the output signal [25]. This smooths out abrupt changes and makes the control system more robust to overload and noise.
Neuroendocrine-PID controller is an integration of the principles of neural networks and the endocrine system [26]. This controller uses artificial neural networks to adapt parameters in real-time, allowing the system to respond more effectively to changing conditions.
BELBIC PID controller (Brain Emotional Learning Based Intelligent Controller) is based on the emotional learning model of the brain [27]. It uses algorithms that mimic emotional learning, allowing the system to adapt effectively to external changes and uncertainties. BELBIC PID controllers find applications in robotics, aviation, and other areas where high reliability and fast adaptability are required [28].
The PIDA controller is an extension of the classical PID controller by adding an integral component [29]. This improves control in the presence of integral errors and makes the system more robust to long-term perturbations [30]. Thus, the variety of PID controller variants makes it possible to improve the performance of controlled systems.
Although such controllers have unique advantages, they require special software implementation tools for industrial controllers. This makes them more challenging to implement in industrial settings where the practicality of solutions is important. The specificity of these controllers can lead to difficulties in understanding and operating them for engineers and technicians who lack knowledge of advanced control techniques. In summary, the I-PD and PI-D controllers represent a combination of efficiency and industrial feasibility.
3. Methods of AIS Algorithm for Industrial Controllers
In the application of microprocessor-based process control methodologies within the oil and gas sector, the integration of controllers into the control system is a common practice. In the architecture of distributed control systems by different companies using microprocessor technology, several components are beyond conventional PID controllers.
The control strategies applied by these controllers encompass not only the tracking error, E, but also incorporate the real-time value of the output signal, PV. This specific design of the controller configuration leads to an enhancement in system performance. It facilitates the generation of the required control actions, CV, which are then directed towards the control plant to achieve the desired modes, SV. During the operation of the control system, a seamless transition occurs between different controller types: PID, I-PD, and PI-D (see Figure 1).
This dynamic switching contributes to the controller’s adaptable structure. The control law governing the I-PD configuration of the control system takes on the following expression:
where KP is a proportional gain of the controller; TI is a time constant of the integral term of the controller; TD is a time constant of the derivative term of the controller.
The formation of the closed-loop control system transfer function, involving the controller (1):
where G(s) is a transfer function of the control plant; CI is a transfer function I-controller in the forward circuit of the block diagram of the control system, to the input of which a tracking error is applied; CPD is a transfer function of the PD controller in the feedback circuit of the control plant, the input of which is supplied with the current value of the output signal.
Let us also consider the PI-D control law, in which the control action is formed based on the tracking error, E, and the change in the output signal PV:
In this case, the expression for the transfer function of the closed-loop control system has the following form:
This paper presents the results of tuning industrial controllers (1), and (4) intending to minimize a performance criterion expressed through Integral Square Error (ISE) performance index [17]:
The integration range is limited by the simulation time of the process, denoted by t1.
With the principles outlined above, we establish the problem formulation for the design of optimal control actions, CV. For the control system illustrated in Figure 1, the task involves determining the parameter settings for the variable controller. This is carried out to minimize the ISE while achieving predetermined values for the output signals, SV. This optimization task is approached through the application of an intelligent search optimization algorithm AIS.
In line with the findings of [21], the AIS algorithm entails the conventional stages of an evolutionary search algorithm, inspired by the mechanisms of the biological immune system. These stages encompass the initialization phase, involving the establishment of initial values for controller parameters, followed by affinity calculations for the parameters concerning the fitness function. Subsequent steps include the selection, cloning, mutation, and identification of the most promising clone to explore controller parameter sets that yield the fitness function minimum.
The AIS algorithm that is compatible with these processes is the clonal selection algorithm (CSA). The application of the AIS clonal selection algorithm to address the synthesis of typical controllers for MIMO systems conceptually underpins ideas similar to those of immune system theory. In the context of formulating a control system challenge, the generalized representation of antibodies corresponds to the array of output variables: Ab = (KP, TI, TD), constituting a set of solutions. The quality criterion (6), expressed in functional form, serves as the antigens: Ag = (E, SV, PV).
The AIS clonal selection algorithm, designed to solve this problem, includes the following operators: [20,21]:
where Ag is a subset of antigens; Ab is an antibody population; G is a set representation; S is a selection operator; C is a clone operator; M is a mutation operator; d is a proportion of permutations; gen is a generation number of the population cycle.
Steps of the clonal selection algorithm for tuning controller parameters to minimize the fitness function:
Step 1. Initialization: generation of the initial Ab population (population size = N).
Population cycle:
Step 2. Affinity (Abi): for each antibody in the population, calculate the fitness function value and determine the affinity, where i is a number of generations.
Step 3. Selection (Gs): select the subset of antibodies with the highest affinity.
Creating new solutions by cloning the most successful and applying mutations:
Step 4 Cloning (Gc): obtain a population of C clones from Ab.
Step 5. Mutation (GM): obtain a population of changed clones.
Step 6. Re-selection (GS): selection of the best clone.
Step 7. Replacement of antibodies with high affinity clones (Abi+1). Replacing outdated solutions with newer ones and repeating this process.
Step 8. The population cycle continues until the specified stopping criterion is reached.
Step 9. Output optimal values.
At the initialization stage, the initial set of solutions that satisfy criterion (6) is generated randomly. The next step is the selection of n antibodies with the best affinity, after which the selection of antibodies suitable for cloning is carried out [21]:
where β is a multiplier that controls the number of the clones; N is population size or total number of antibodies.
Following the cloning process, which involves duplicating high-affinity antibodies, a set (KP, TI, TD) denoted as x is generated. This set subsequently experiences random mutations with a predetermined mutation probability pm. When the degree of affinity is elevated, the mutation rate tends to be reduced:
where A is an affinity dependent factor and decreases with increasing affinity.
The low affinity antibodies are replaced with new randomly generated antibodies represented by the expression:
The repetition of the population cycle continues either until a predefined stopping criterion is satisfied or until a specific number of generations has occurred, referred to as gen. Due to the use of the AIS algorithm, several solutions with a high degree of similarity are generated. These solutions include controller parameters (KP, TI, TD) that achieve a minimum value of ISE (6).
A procedure to apply AIS to tune the parameters of the controller by relating the design parameters of the AIS with tuning parameters and ISE performance criteria (6) is as follows:
Initial Condition: Definition of ISE as the fitness function to be minimized. The ISE corresponds to the antigen, Ag, in the parameters of the AIS algorithm.
Step 1. Initialization population creates an initial population with controller parameters randomly selected within specified ranges. Each member of the antibody population, Ab, represents a set of controller parameters (KP, TI, TD).
Step 2. Affinity: calculating ISE for each antibody by simulating the control system with appropriate controller parameters. This score determines the affinity of each antibody, with lower ISE values indicating a higher affinity.
Step 3. Selection: choosing the best solutions, (KP, TI, TD), based on the minimum value of ISE performance criteria.
Step 4–6. Cloning, mutation, and re-selection: cloning selected sets of controller parameters to create multiple copies, and the modification of these clones. Choosing the best solutions, (KP, TI, TD).
Step 8. The population cycle continues until the minimum performance criterion is reached.
Step 9. Selecting antibodies with the highest affinity as a set of parameters for the optimal controller, (KP, TI, TD). Implementation of optimal controller parameters in an industrial control system.
Table 1 shows the comparison between the design parameters of an AIS and the definition of the control system.
The parameters of the AIS algorithm such as population size, N, mutation probability, pm, proportion of permutations d, cloning multiplier, β, affect the variety of solutions and determine the efficiency and accuracy of optimization. The correct setting of these parameters allows you to find the optimal controller parameters.
The initial population size in AIS algorithms, N, is an important parameter for optimization. The optimal population size will depend on the specific problem and control law, but there are general strategies that can be used to optimize controllers. It is recommended to start with a moderate population (approximately 30–50 individuals) and adjust this based on the results obtained. This ensures sufficient diversity of solutions while avoiding local minima and maintaining acceptable runtime. A larger population (50–100 or more individuals) allows for more comprehensive exploration and reduces the risk of getting stuck in local minima.
Examples of parameters (pm, d, β) for the algorithm:
- High probability of mutation and a large proportion of permutations (pm = 0.7, d = 0.5, β = 0.5): this can lead to significant changes in the population in each generation. This contributes to a broad exploration of the solution space and allows for a more comprehensive search for an optimal solution, but it may take more time to converge on a single optimal solution. This approach is suitable for complex problems with many local optima.
- Low probability of mutation and a small proportion of permutations (pm = 0.2, d = 0.2, β = 0.5): the population changes minimally, resulting in fast convergence on a solution. However, the algorithm may get stuck in one of the local optima, limiting its ability to explore other domains of the solution space. This approach might be preferable for problems with well-defined solution spaces or for simpler problems.
- High cloning multiplier (pm = 0.5, d = 0.3, β = 0.8): this setting causes the algorithm to create many copies of the best solutions. This allows for a thorough exploration of the vicinity of these solutions, which can enhance the accuracy of the optimization process. However, this approach also increases computational costs. This strategy is suitable for applications that require high precision and accuracy.
4. Optimal Design of Controllers for Distillation Column
In this section, we describe our computation experiments. In the context of applying AIS algorithms to optimize ISE (6), the primary fitness function typically focuses on a cumulative assessment of the difference between SV and PV. In essence, the discrete formulation of criterion (6) is employed. Consequently, the operation of these intelligent search algorithms unfolds as follows: within a predefined timeframe, the current PV values are input and compared against the SV. The resulting disparity is assessed using the ISE. However, these algorithms tend to identify and halt at a relative local minimum, contingent upon the initial population provided. This section shows the results of solving this problem based on the transformation of the ISE criterion [31]:
where a, b, B, Δ are the parameters of the transfer function of a closed-loop control system, T(s).
To practically apply the method, a two-loop control system is employed for the operations of a tray-type distillation column. This type of column holds paramount importance in industries such as oil, gas, and chemicals, as it is designed to purify liquids and gases. To implement the method in practice, a two-loop control system is used for the operation of a tray-type distillation column. These columns are of great importance in industries such as oil and gas, where they are used to purify liquids and gases.
A typical distillation column consists of a vertical structure that contains trays or packing material. It includes a reboiler that provides heat in the form of steam to the bottom of the column, a condenser, and a liquid reflux tank that stores the condensed vapor returning from the top of the column. The input material entering the column consists of primary components (for example, butane and pentane for raw gas), along with impurities from other components [32]. It is important to minimize or eliminate these impurities from the final product. Key components can be categorized into heavier and lighter fractions. The heavier components accumulate at the bottom of the column, while the lighter components are collected as the distillate at the top. The internal structures of the column facilitate the flow of liquids and vapors. These structures can be plates, nozzles, or other devices.
Currently, a significant body of the literature explores the modeling and control of distillation columns, taking into account internal structures, specific process conditions, and requirements. Numerous studies focus on binary control structures that govern changes in reflux flow rates and reboiler heat loads to regulate the composition of components in the distillate and bottoms.
Within this context, liquid flow rates (L) and vapor flow rates (V) are inputs, while product concentrations χD and χB are outputs. The L − V configuration is a typical control structure for distillation with composition control. In this setting, the control system’s objective is to maintain the desired product concentrations χD and χB at the output of the unit using industrial controllers.
Various mathematical models have been developed to describe the L − V configuration, including the Wood-Berry distillation column model [33], a simplified model proposed by Morari and Zafiriou [34], and a detailed model for ethanol-water separation presented in Luyben [35]. For this study, we utilize the model proposed by Minh et al. [32] for a tray-type distillation column with 14 trays.
To validate this model, experiments were conducted in the TIA Portal environment using real data. These experiments allowed us to confirm the accuracy of the model and its relevance to real industrial processes. At the end of Section 4, the results of the modeling of a control system with controllers in the TIA Portal environment are presented.
The distillation column can be described as a system with two input and output variables, making it a two-input, two-output system (TITO). This type of system is commonly referred to as a two-dimensional control system [32]:
where L is the reflux rate; V is the vapor boil-up rate; is the distillate composition; is the bottom composition.
Let us introduce two column vectors of input, CV1, CV2 and output, PV1, PV2, signals:
By the introduced vectors, the expression for the model of a TITO process control system for a distillation column has the form:
where G11 and G22 are transfer functions of isolated subsystems; G12 and G21 are transfer functions of interconnections between subsystems (see Figure 2):
Figure 2 shows the structural diagram of the TITO system. The structural diagram consists of three modules: controller, decoupling unit and TITO control plant. To achieve stabilization of the distillation process, specific target values need to be set. These values include the purity of the distillate, defined as the percentage of isobutane and butane in the product, which is SV1 = 0.98, and the purity of material from the bottom of the column, also defined in terms of the percentage of these components, at SV2 = 0.02.
We will now derive the results from simulating the transfer functions of isolated circuits by applying a decoupling technique, ensuring that there are no interconnections. To determine the necessary system dynamics, transient simulations were performed (see Figure 3), with PV1 and PV2 representing the current output values of the two circuits. In these simulations the signals SV1 = 0.98 and SV2 = 0.02 was used as the desired input.
From the analysis of the step responses, it can be concluded that they are monotone. Consequently, for the two circuits described by Equation (14), the control law (1), incorporating the time constant, is selected, thus opting for the I-P controller. By expression (2), the transfer functions for the closed-loop system with I-P controllers can be expressed as:
To achieve the desired dynamics described as (SV), we introduce a fitness function designed for optimization purposes. To solve this problem, this study proposes a methodology that is similar to the approach described in [31]. This methodology is based on deriving a quality criterion without an integration function from the Formula (6).
For clarification, consider the transfer function of a closed-loop control system with a second-order controller in the form of a transfer function:
In this case, the ISE has the form:
According to the model (18):
Then,
This performance criterion is effectively utilized in this work as a fitness function, the minimization of which is achieved through a search algorithm based on the AIS algorithm.
Therefore, the task can be simplified to the following challenge: identifying the elusive parameters of controllers KP1, TI1, KP2 and TI2, that yield the minimum value for the quality criterion (21) through the use of the AIS algorithm. This approach results in a unique quality criterion for each subsystem:
When formulating quality criteria, several constraints must be taken into account. First, simulation time and, consequently, integration range are limited by the simulation time required for the technological process. Second, controller parameters, which are solutions to an optimization problem, must be strictly positive:
The procedures of the AIS algorithm, which are designed to minimize ISE (22) and (23), are implemented within the MATLAB environment. During the implementation of the algorithm, an initial population is generated. This population consists of controller parameter values that are selected from a range of feasible values, ensuring both the stability of the closed-loop control system and its feasibility from a technical perspective. Subsequently, a complete calculation cycle is carried out, following the steps defined in the search algorithm described in Section 3. Table 2 shows the general algorithm settings.
During the implementation of algorithms within the MATLAB environment, parameters of controllers for the first and second control loops were obtained: (see Table 3).
In the previous works of the authors [36,37], the results of the development of various bioinspired algorithms to minimize such quality criteria as ISE, ITSE, and IAE were obtained. Bioinspired algorithms were applied to the PI controller, such as ACO [36], PSO [36], DA [36], AIS [37], GA [37], etc. As the AIS and GA produce the best results for ISE, these algorithms are used in this paper for a comparative analysis with the AIS algorithm for the I-P controller.
To demonstrate the effectiveness of the proposed approach, the results obtained with AIS were compared with the GA and hybrid GA methods. We present the results of comparing AIS for I-P with algorithms: AIS for PI controller, GA for PI controller, and hybrid GA with AIS for PID controller. The authors developed these algorithms in their articles [37] and obtained the parameters for the controllers (see Table 3).
Figure 4 shows a comparison of the convergence characteristics of AIS and GA in minimizing ISE.
To validate the performance of the selected algorithm, a statistical analysis was conducted using the numerical performance index ISE, as shown in Table 4.
Figure 5 shows the results of a comparative analysis of the step responses of two control loop systems with different PID and IP controllers.
Upon examining the step responses of the control system using the controllers, the time response specifications can be tabulated in Table 5.
Based on the simulation results obtained, it is possible to conclude the effectiveness of intelligent controllers that were tuned using the AIS algorithm:
- The settling time for processes using an I-P controller is significantly shorter compared to those using a PID controller;
- The overshoot observed in processes with an I-P controller is lower compared to processes with a PID controller;
- The rise time for the primary circuit’s process using an I-P controller is faster than that with a PID controller.
As a result, the control laws of the two industrial regulators are as follows:
The simulation results of the two control loops using these designated signals are presented in Figure 6. Based on the analysis of the graphs, it can be concluded that the desired dynamics have been achieved. Over time, the values of χD and χB have converged towards the predefined values of 0.98 and 0.02, respectively.
In addition, Figure 6 illustrates the control action values of L and V required to achieve the desired system performance.
However, the achieved results indicate the output values generated by individual circuits. Figure 2 provides a representation of a diagram to account for the effects of interactions between components. The simulated transfer functions from the mathematical model (14) are depicted in this diagram.
The issue of addressing and compensating for interconnections arising from the presence of coupling devices H1 and H2 has been thoroughly explored in [36]. While this current work focuses on the development of controllers based on AIS, a comprehensive explanation of the decoupling process and the calculation of matrices H1 and H2 will not be presented herein. It is sufficient to say that decoupling matrices are used to counteract the effects of these relationships, enabling the determination of output values for a MIMO system as illustrated in Figure 6.
The results of the modeling of the distillation column control system with controllers in the TIA Portal environment using real data are presented in Figure 7.
According to the simulation results, it can be concluded that the obtained settings of industrial controllers correspond to the optimal technological process and provide effective control.
When using an industrial control system, the following problems are solved: calculation of sample steps for digital controllers, T; setting of a dead zone for error, E; and saturation for the control signal, CV. It is also planned to develop a predictive control model for the distillation column that takes into account disturbances, deviations, and the chemical analysis of feed materials.
5. Discussion
The research presented in this paper focuses on the application of AI techniques, specifically AIS, to develop an optimal control strategy for a MIMO system. The objective of the study is to improve the control of a distillation column in the context of the oil and gas industry to achieve the desired operational states efficiently. This optimization process is achieved using the AIS clonal selection algorithm, which iteratively refines the control strategy.
The research successfully addresses the challenge of optimizing the operation of the distillation column by introducing innovative approaches based on the principles of the AIS clonal selection algorithm. Traditional control strategies often rely on static rules and fixed parameters, which may not be adaptable to the complex and dynamic nature of industrial systems. In contrast, the use of AIS, inspired by the immune system’s mechanisms, provides a dynamic and self-adjusting approach to optimize control.
One of the significant strengths of this research is its incorporation of relevant control laws and a fitness function. Through the integration of these components, the researchers have ensured that the optimized control strategy not only minimizes tracking errors but also considers real-time input signals. This integrated approach acknowledges the significance of real-world feedback in enhancing the control strategy and leading to enhanced system performance and stability.
Furthermore, the study examines control strategies within the context of a distributed industrial control system. This approach is particularly pertinent in modern industrial environments, where interconnected systems necessitate coordinated and efficient control measures. The research investigates the development of control strategies that can efficiently manage distributed components, thereby enhancing the flexibility and scalability of the proposed techniques.
Two specific control strategies, the PID controller and the I-PD controller, have been evaluated in detail. A comparison and analysis of these strategies contribute to a broader understanding of the advantages and limitations of various control approaches concerning the operational requirements of the oil and gas industry. This comparative analysis provides insight into the feasibility and effectiveness of each strategy, helping practitioners select the most suitable approach based on specific needs.
In conclusion, the study presented in this paper demonstrates the potential and efficacy of employing artificial immune systems, specifically the AIS clonal selection algorithm, in enhancing the control strategy of MIMO systems. By focusing on optimizing a distillation column in the oil and gas industry, this research provides valuable insights into industrial process control. The incorporation of real-time output signals, consideration of distributed control, and comparison of different control strategies enrich the significance and applicability of the study. The findings not only contribute to a better understanding of control optimization but also pave the way for further research and refinement of AI-based control techniques in complex industrial settings.
6. Conclusions
This article presents an innovative approach to addressing the challenge of designing optimal industrial controllers using intelligent techniques. This approach considers typical controller configurations such as PID, I-PD, and PI-D controllers, which are commonly used in distributed control systems. The proposed approach is tested and evaluated using a MIMO distillation column control system, which is a common application in the oil and gas industry. To solve this problem, a novel search algorithm based on the clonal selection principle of artificial immune systems is used. These systems are known for their ability to adapt to changing conditions.
The significance of this work lies in the introduction of a novel approach to the formulation of the objective function for optimal control, which is intricately integrated with intelligent search algorithms. This research has implications for practical applications, where these intelligent methods can be used to solve diverse problems. Therefore, the findings of this study have the potential to serve as a valuable resource for future implementation in various practical settings.
Author Contributions
Conceptualization, O.S., B.S. and E.K.; methodology, O.S., and B.S.; software, O.S.; validation, O.S., B.S. and E.K.; formal analysis, O.S. and E.K.; investigation, O.S., B.S. and E.K.; resources, B.S. and E.K.; data curation, O.S. and E.K.; writing—original draft preparation, O.S.; writing—review and editing, B.S. and E.K.; visualization, O.S. and E.K.; supervision, B.S.; project administration, B.S.; funding acquisition, B.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Science Committee of the Ministry of Science and Higher Education of the Republic of Kazakhstan, grant number AP19674691.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Cokmez, E.; Kaya, I. Optimal design of I-PD controller for disturbance rejection of time delayed unstable and integrating-unstable processes. Int. J. Syst. Sci. 2024, 55, 2314215. [Google Scholar] [CrossRef]
- Raja, G.L.; Ali, A. New PI-PD controller design strategy for industrial unstable and integrating processes with dead time and inverse response. J. Control Autom. Electr. Syst. 2021, 32, 266–280. [Google Scholar] [CrossRef]
- Roslan, M.N.; Bingi, K.; Devan, P.A.M.; Ibrahim, R. Design and Development of Complex-Order PI-PD Controllers: Case Studies on Pressure and Flow Process Control. Appl. Syst. Innov. 2024, 7, 33. [Google Scholar] [CrossRef]
- Lee, J.H.; Davari, H.; Singh, J.; Pandhare, V. Industrial Artificial Intelligence for industry 4.0-based manufacturing systems. Manuf. Lett. 2018, 18, 20–23. [Google Scholar] [CrossRef]
- Arinez, J.F.; Chang, Q.; Gao, R.X.; Xu, C.; Zhang, J. Artificial Intelligence in Advanced Manufacturing: Current Status and Future Outlook. J. Manuf. Sci. Eng. 2020, 142, 110804. [Google Scholar] [CrossRef]
- Koroteev, D.; Tekic, Z. Artificial intelligence in oil and gas upstream: Trends, challenges, and scenarios for the future. Energy AI 2021, 3, 10. [Google Scholar] [CrossRef]
- Li, H.; Yu, H.; Cao, N.; Tian, H.; Cheng, S. Applications of artificial intelligence in oil and gas development. Arch. Comput. Methods Eng. 2021, 28, 937–949. [Google Scholar] [CrossRef]
- Abdelhamid, K.; Touat, A.B.; Kenioua, L. Artificial intelligence in Upstream Oil and Gas Industry: A Review of Applications, Challenges and Perspectives. In Proceedings of the International Conference on AIAP: Artificial Intelligence and its Applications, El-Oued, Algeria, 24–26 January 2021; Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2021; Volume 413, pp. 262–271. [Google Scholar]
- Xing, B.; Gao, W. Innovative computational intelligence: A rough guide to 134 clever algorithms. In Intelligent Systems Reference Library; Springer: Berlin/Heidelberg, Germany, 2014, 62, 469. [Google Scholar]
- Kouba, N.; Menaa, M.; Hasni, M.; Boudour, M. A novel optimal combined fuzzy PID controller employing dragonfly algorithm for solving automatic generation control problem. Electr. Power Compon. Syst. 2018, 46, 2054–2070. [Google Scholar] [CrossRef]
- Amar, M.N.; Zeraibi, N.; Redouane, K. Optimization of WAG process using dynamic proxy, genetic algorithm and ant colony optimization. Arab. J. Sci. Eng. 2018, 43, 6399–6412. [Google Scholar] [CrossRef]
- Wang, J.; Song, N.; Jiang, E.; Xu, D.; Deng, W.; Mao, L. The Application of the Particle Swarm Algorithm to Optimize PID Controller in the Automatic Voltage Regulation System. In ICSEE/LSMS; Springer: Singapore, 2017; Volume 763, pp. 529–536. [Google Scholar]
- Sethi, R.; Panda, S.; Sahoo, B.P. Cuckoo search algorithm based optimal tuning of PID structured TCSC controller. In Computational Intelligence in Data Mining; Springer: Berlin/Heidelberg, Germany, 2015; Volume 1, pp. 251–263. [Google Scholar]
- Kumar, D.; Meenakshipriya, B.; Ram, S.S. Design of PSO based I-PD Controller and PID Controller for a Spherical Tank System. Indian J. Sci. Technol. 2016, 9, 1–5. [Google Scholar]
- Puangdownreong, D.; Nawikavatav, A. Thammarat. Optimal Design of I-PD Controller for DC Motor Speed Control System by Cuckoo Search. Procedia Comput. Sci. 2016, 86, 83–86. [Google Scholar] [CrossRef]
- Jain, T.; Nigam, M. Optimization of PD-PI Controller using Swarm Intelligence. Int. J. Comput. Cogn. 2008, 6, 55–59. [Google Scholar]
- Sahraoui, M.; Salem, M. Application of artificial immune algorithm-based optimization in tuning a PID controller for nonlinear systems. Int. J. Autom. Control 2015, 9, 186–200. [Google Scholar]
- Saleh, M.; Saad, S. Artificial Immune System based PID Tuning for DC Servo Speed Control. Int. J. Comput. Appl. 2016, 155, 23–26. [Google Scholar]
- Castro, L.; Zuben, F. The Clonal Selection Algorithm with Engineering Applications. Workshop Proc. GECCO’00, 2000; 36–37. [Google Scholar]
- Castro, L.; Zuben, F. Learning and Optimization Using the Clonal Selection Principle. IEEE Trans. Evol. Comput. 2002, 6, 239–251. [Google Scholar] [CrossRef]
- Padmanabhan, S.; Chandrasekaran, M.; Ganesan, S.; Khan, M.; and Navakant, P. Optimal Solution for an Engineering Applications Using Modified Artificial Immune System. Mater. Sci. Eng. 2017, 183, 012025. [Google Scholar] [CrossRef]
- Wang, M.; Feng, S.; He, C.; Li, Z.; Xue, Y. An Artificial Immune System Algorithm with Social Learning and Its Application in Industrial PID Controller Design. Math. Probl. Eng. 2017, 2017, 13. [Google Scholar] [CrossRef]
- Makhbouche, A.; Boudjehem, B.; Birs, I.R.; Muresan, C.I. Fractional-Order PID Controller Based on Immune Feedback Mechanism for Time-Delay Systems. Fractal Fract. 2023, 7, 53. [Google Scholar] [CrossRef]
- Tumari, M.Z.M.; Ahmad, M.A.; Rashid, M.I.M. A fractional order PID tuning tool for automatic voltage regulator using marine predators algorithm. Energy Rep. 2023, 9, 416–421. [Google Scholar] [CrossRef]
- Suid, M.H.; Ahmad, M.A. Optimal tuning of sigmoid PID controller using Nonlinear Sine Cosine Algorithm for the Automatic Voltage Regulator system. ISA Trans. 2022, 128B, 265–286. [Google Scholar] [CrossRef] [PubMed]
- Ghazali, M.R.; Ahmad, M.A.; Raja, M.T. Adaptive Safe Experimentation Dynamics for Data-Driven Neuroendocrine-PID Control of MIMO Systems. IETE J. Res. 2022, 68, 1611–1624. [Google Scholar] [CrossRef]
- Saeed, M.U.; Sun, Z.; Elias, S. Semi-active vibration control of building structure by Self Tuned Brain Emotional Learning Based Intelligent Controller. J. Build. Eng. 2022, 46, 103664. [Google Scholar] [CrossRef]
- Yakout, A.H.; Sabry, W.; Abdelaziz, A.Y.; Hasanien, H.M.; AboRas, K.M.; Kotb, H. Enhancement of frequency stability of power systems integrated with wind energy using marine predator algorithm based PIDA controlled STATCOM. Alex. Eng. J. 2022, 61, 5851–5867. [Google Scholar] [CrossRef]
- Huba, M. Filtered PIDA Controller for the Double Integrator Plus Dead Time. IFAC-PapersOnLine 2019, 52, 106–113. [Google Scholar] [CrossRef]
- Ferrari, M.; Visioli, A. A software tool to understand the design of PIDA controllers. IFAC-PapersOnLine 2022, 55, 249–254. [Google Scholar] [CrossRef]
- Allwright, D.J. A note on Routh-Hurwitz determinants and integral square errors. Int. J. Control 1980, 31, 807–810. [Google Scholar] [CrossRef]
- Minh, V.T.; Rani, A.A. Modeling and Control of Distillation Column in a Petroleum Process; Mathematical Problems in Engineering; Hindawi Publishing Corporation: Perak, Malaysia, 2009; Volume 2009, p. 14. [Google Scholar]
- Wood, R.K.; Berry, M.W. Terminal composition control of a binary distillation column. Chem. Eng. Sci. 1973, 28, 1707–1717. [Google Scholar] [CrossRef]
- Morari, Z.; Zafiriou, E. Robust Process Control; Publisher: Prentice-Hall, Inc.: Englewood Cliffs, NJ, USA, 1989; 488p. [Google Scholar]
- Luyben, W.L. Simple Method for tuning SISO controllers in multivariable systems, Ind. Eng. Chem. Process Des. Dev. 1986, 25, 654–660. [Google Scholar] [CrossRef]
- Samigulin, T.I.; Shiryayeva, O.I. Development of a SMART-system for a complex industrial object control based on metaheuristic algorithms of swarm intelligence. WSEAS Trans. Power Syst. 2021, 16, 231–240. [Google Scholar] [CrossRef]
- Shiryayeva, O.I.; Samigulin, T.I. Application of Clonal Selection Algorithm for PID controller synthesis of MIMO systems in oil and gas industry. Inform. Autom. Pomiary Gospod. Ochr. Sr. 2019, 9, 50–53. [Google Scholar] [CrossRef]
Figure 1.
Scheme of an industrial control system with a variable controller.
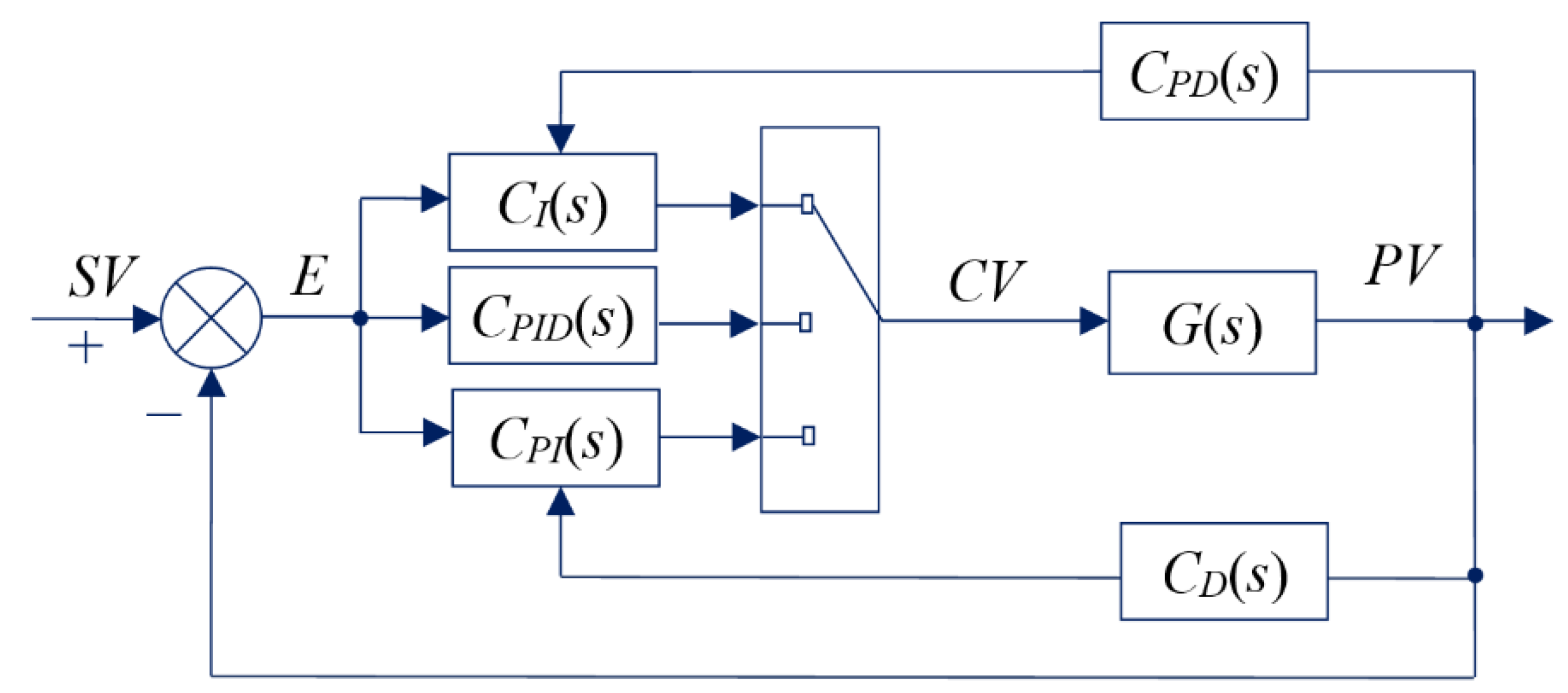
Figure 2.
Scheme for modeling a TITO system with controllers.
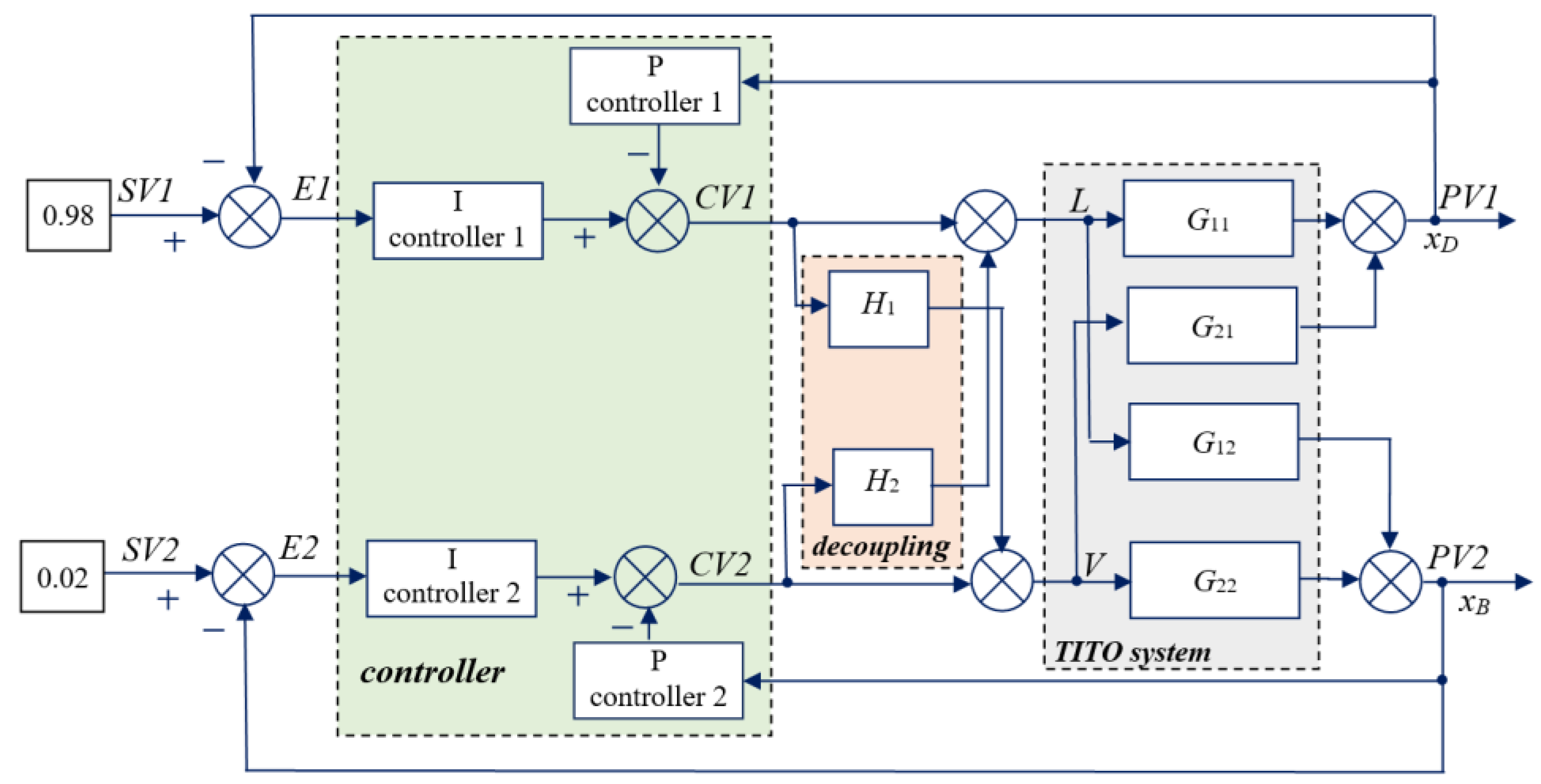
Figure 3.
Modeling results of two control loops: (a) First control loop; (b) Second control loop.
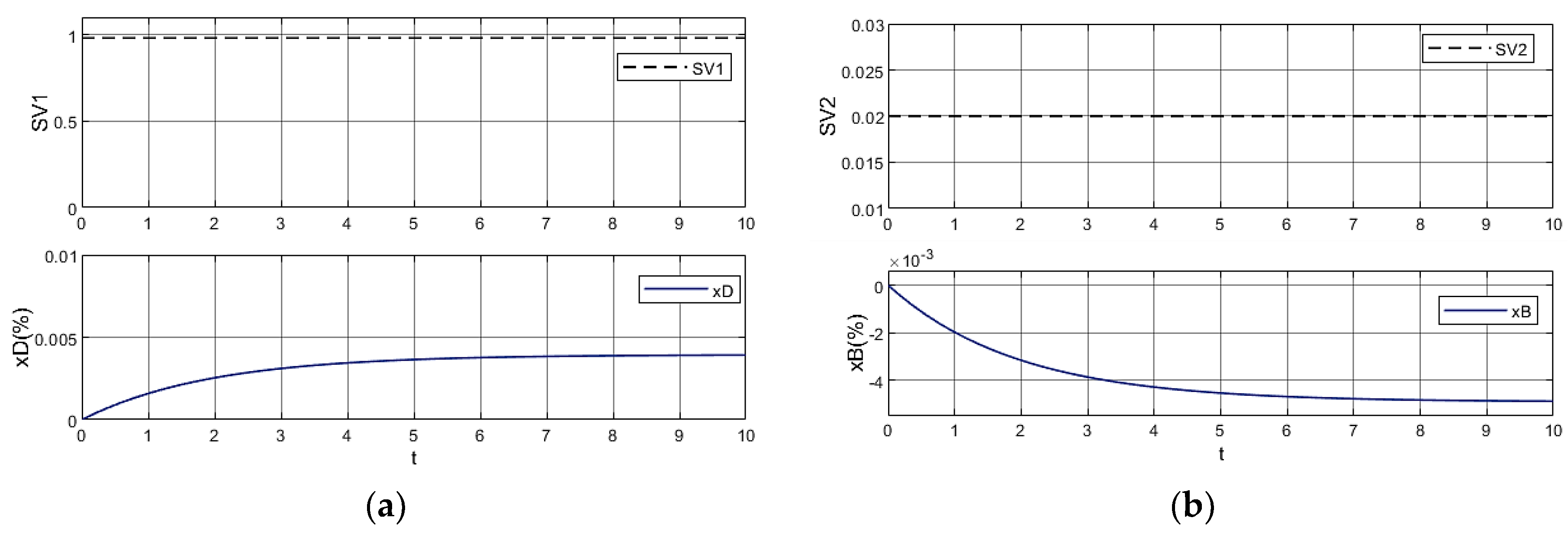
Figure 4.
Comparison of convergence characteristics of AIS and GA methods: (a) First control loop; (b) Second control loop.
Figure 4.
Comparison of convergence characteristics of AIS and GA methods: (a) First control loop; (b) Second control loop.

Figure 5.
Step responses of the control system with controllers: (a) First control loop; (b) Second control loop.
Figure 5.
Step responses of the control system with controllers: (a) First control loop; (b) Second control loop.
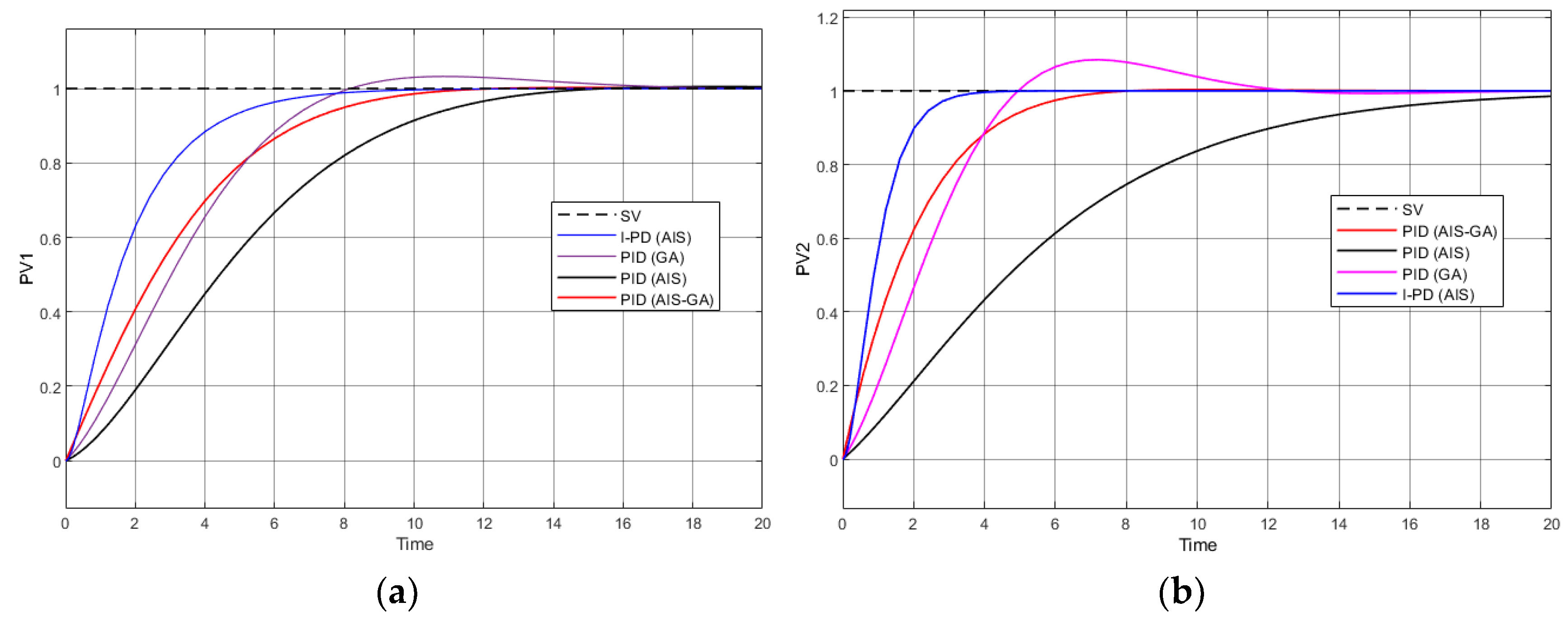
Figure 6.
Simulation results of two control loops with reference signals: (a) First control loop; (b) Second control loop.
Figure 6.
Simulation results of two control loops with reference signals: (a) First control loop; (b) Second control loop.
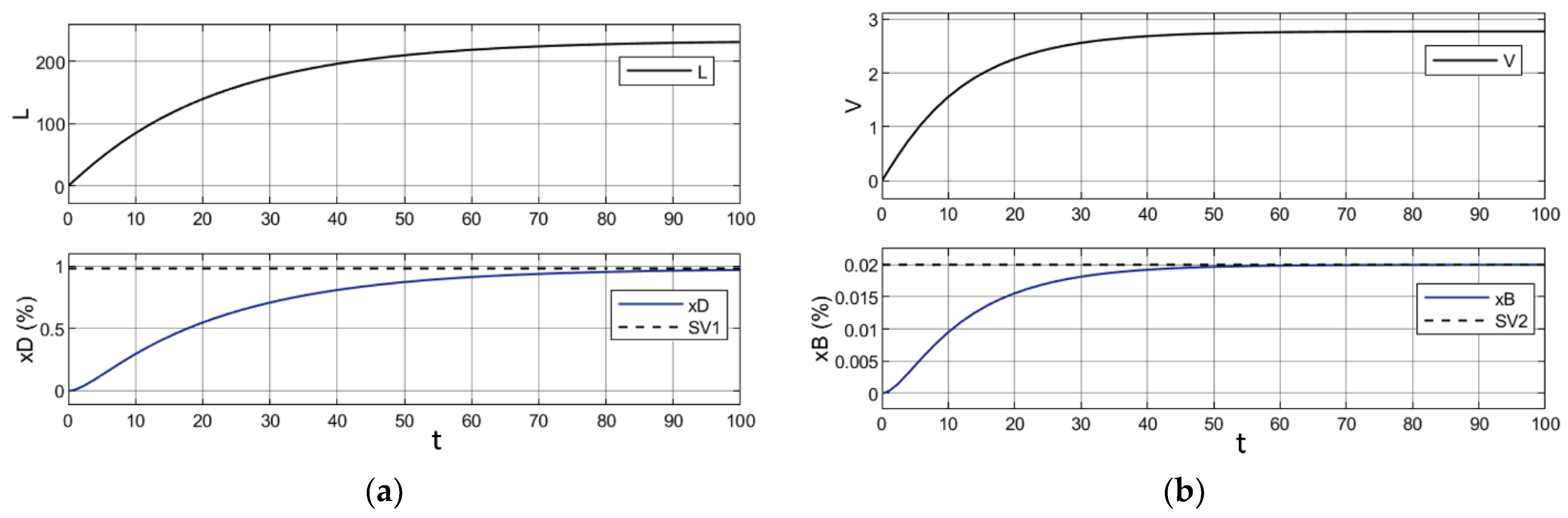
Figure 7.
Modeling results of two control loops of the distillation column: (a) χD is the distillate composition; (b) χB is the bottom composition.
Figure 7.
Modeling results of two control loops of the distillation column: (a) χD is the distillate composition; (b) χB is the bottom composition.


Table 1.
The relationship between an AIS and a control system.
| AIS | Control System | Definition |
| N | Population size vs. size of controller parameters set | |
| ) | (KP, TI, TD) | Antibody population vs. set of controller parameters |
| Ag | ISE | Antigens vs. ISE |
Table 2.
Initial condition for the algorithm.
| Symbol | Value |
| N | 100 |
| KP([0.1; 1]; 1/TI ([0.1; 10] | |
| gen | 50 |
| (pm, d, β) | (0.5, 0.3, 0.8) |
Table 3.
Parameters of the controllers.
| Controllers | KP1 | 1/TI1 | KP2 | 1/TI2 |
| I-P controller (AIS) | 0.5314 | 9.9961 | 0.0463 | 9.9928 |
| PI controller (AIS) | 25.34 | 20.48 | 20.16 | 20.24 |
| PI controller (AIS-GA) | 19.54 | 48.12 | 22.73 | 23.86 |
Table 4.
Analysis for ISE.
| Controllers |
ISE1 First Control Loop |
ISE2 Second Control Loop |
| I-P controller (AIS) | 1.865 | 1.56 |
| PI controller (AIS) | 2.435 | 1.94 |
| PI controller (AIS-GA) | 3.02 | 2.335 |
Table 5.
Step response specification.
| Controllers | Settling Time (TSET) | Overshoot (POV, %) | Rise Time (TR) |
| First control loop | |||
| PI (AIS-GA) | 9.53 | 0.261 | 6.18 |
| PI (AIS) | 12.9 | 0.508 | 8.37 |
| PI (GA) | 13.8 | 3.25 | 5.41 |
| I-P (AIS) | 7.01 | 0 | 3.85 |
| Second control loop | |||
| PI (AIS-GA) | 6.25 | 0.342 | 3.99 |
| PI (AIS) | 18.7 | 0 | 11.1 |
| PI (GA) | 11 | 8.46 | 3.53 |
| I-P (AIS) | 3.02 | 0 | 1.74 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



