
Submitted:
07 October 2023
Posted:
07 October 2023
You are already at the latest version
Abstract
The paper provides a comprehensive review of the recent advancements and methodologies in Human-Robot Collaboration (HRC) applied to the manufacturing assembly process. In modern manufacturing, the assembly process involves intricate and time-consuming operations, often necessitating flexible manual interventions. However, the cost and stability issues associated with manual labor highlight the need for collaborative solutions integrating humans and robots. HRC, as a viable solution, involves the joint effort of humans and robots in manufacturing tasks, presenting advantages in terms of precision, reproducibility, and cycle time. This review categorizes and discusses methodologies such as task allocation, reinforcement learning, and Cyber-Physical Systems (CPS)-based planning approaches that facilitate HRC in the assembly process. It also explores experiments and future trends to address challenges and enhance efficiency in manufacturing assembly through intelligent collaboration between humans and robots. The objective of this research is to provide insights and directions for further research in HRC to optimize manufacturing processes. By analyzing the existing state-of-the-art and presenting future prospects, this paper aims to guide researchers and practitioners toward more effective implementations of HRC in manufacturing assembly, ultimately leading to improved operational efficiency and productivity.
Keywords:
Human-Robot Collaboration (HRC)
; manufacturing assembly
; task allocation
; reinforcement learning
; Cyber-Physical Systems (CPS)
; Industry 4.0
; robotic assembly sequence planning
; collaborative robotics
1. Introduction
The manufacturing assembly process requires a variety of energy-intensive and time-consuming complex operations. The assembly is an integral part of the manufacturing process to assemble components, parts, and kits, by obtaining specific position relationship with each other. In order to manage various assembly processes, flexible manual operations are often required [1]. It is quite difficult for the workers and robots to complete assembly tasks efficiently and independently [2]. Because of the disadvantage of human labor for high cost and poor stability, the replacement of operators with human-robot collaboration (HRC) in manufacturing task is becoming a viable solution [3,4].
In response to extremely competitive market conditions, manufacturers frequently encounter the problem of producing many versions of the fundamental product on the same assembly line, resulting in the assembly line balancing issue (ALBP) [5]. Earlier task distribution between workers and robots largely depended on predetermined norms and mostly performed repeating tasks having a high frequency. Furthermore, excessive labor intensity can quickly lead to a reduction in operators' motivation to work, affecting the assembly process's stability and efficiency [6,7].
HRC has been the subject of a lot of research in the last few years. A systematic categorization with explanation approach was provided by Wang et al. for HRC assembly task allocation in their research [8]. Then a chessboard-based decision-making technique was proposed by Yu et al. for the HRC assembly method [9]. The amount of uncertainty was assessed by Rahman et al. through constructing a mutual trust model between people and robots and evaluating the feasibility of job allocation using a two-stage feed-forward optimization approach [10]. Researchers developed a hybrid HRC assembly cell based on human behavior monitoring for estimating collaborative work demand in a study [11]. Nevertheless, incorporating HRC into actual production processes still poses substantial hurdles. The conduct of workers who collaborate is very unpredictable. Collaboration is challenging because of the inability of the robot to effectively recognize the intentions of human [12]. Furthermore, allocating subtasks that requires collaboration between robots and humans is difficult due to the time and energy needed to compute optical algorithms. The energy source is a crucial aspect of the operation process [13]. During the learning process through reinforcement, the study discovered the change state of agents with doing tasks, getting a reward, and interrelating in the environment, which is quite analogous to how humans learn [14]. In the context of the dynamic shift of human states engaged in collaboration, a fatigue function was designed by Zhang, R., et al. based on task time and task difficulty. Agent-Humans with comparable qualities to actual humans use reinforcement learning to make decisions and limit the possibility for mistakes in the decision-making process of human [3].
Zhang, R., et al. have proposed HRC application through combining high operational intensity in robot and the human's flexibility. Considering this aspect, a reinforcement learning algorithm has been suggested for optimizing the manufacturing assembly tasks. The great potentiality of the proposed method has been verified in dynamic division of HRC tasks. The proposed method has enabled the assembly sequence to be sent through visual interface to the shop floor workforce, and the decision of the Agent-Human is only needed to followed by the operator for the completion of assembly tasks [3].
Figure 1.
HRC assembly [4].
Figure 1.
HRC assembly [4].
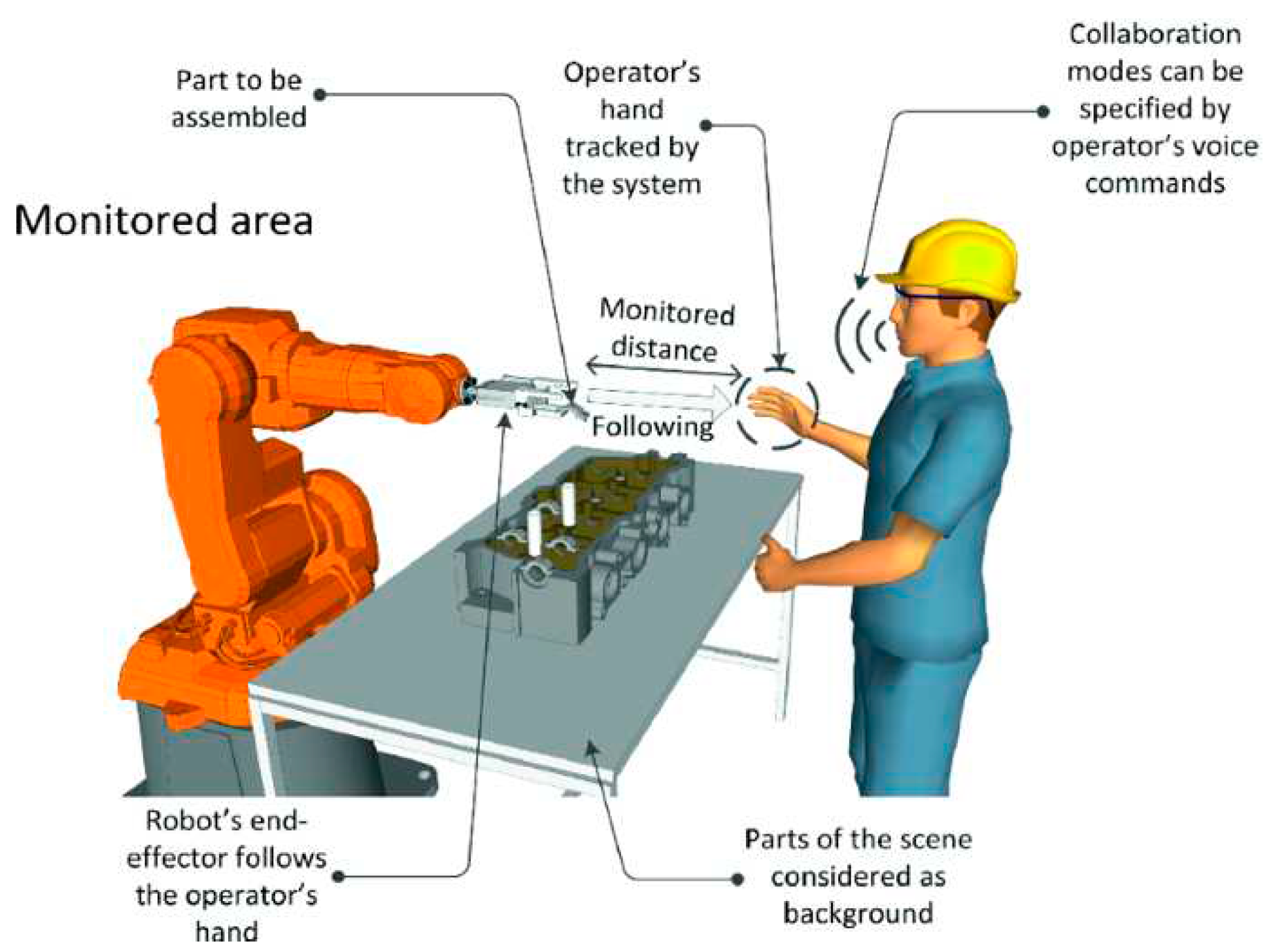
HRC applications have already found their way into industrial practice, resulting in the Industry 4.0 revolution [15], which allows humans and robots to interact in the same area [8,16]. HRC applications have a variety of advantages over non-collaborative ones since they allow both humans and robots, to profit. When compared to purely manual manufacturing, robots can provide great precision and reproducibility, lift huge weights, and minimize cycle time. Humans, on the other hand, have exceptional intellect and dexterity. However, in HRC applications, safety problems arise since robots must share space or perform jobs with people, and without adequate application, human safety may be jeopardized [17]. The exploration towards manufacturing flexibility, which allows enterprises to efficiently match their production with the demand for low volume, highly customized products, has been the driving factor behind such research. As humans are sharing task and space with robots in HRC applications, there is a concern for the violation of human safety. Research has been going on the seamless coexistence of both of these collaborating entities which require autonomy and intelligence [18].
With the increasing outsourcing of blue-collar tasks towards the industrial robots for improving the flexibility of the process operation [19,20], now robots are not confined only in doing complex risky tasks that cannot be done by humans [21]. Robotic arms are extensively used in intelligent manufacturing because of their adaptability, configurability, kinematic boundary conditions, and collaboration with smart instruments and sensors [22]. The resulting flexibility, on the other hand, can only be achieved if several aspects of intelligent manufacturing work together successfully for allowing the system to assess the design of the product exclusive of any interaction and arrange the assembly activities based on recent design modifications.
The popularity of Cyber-Physical Systems (CPS) have grown because of their capacity for improving intelligence of the industrial process to enable efficient communication between the physical and virtual worlds [23]. CPS's characteristics enable smart manufacturing [24]; It allows the virtual planning of the robotic operations, for example, the resource virtualization [22], for providing extensive parameters before they are placed into production [25]. CPS helps to detect flaws and plan industrial operations automatically while also providing additional system flexibility through continual process parameter modification [26]. The fourth industrial revolution and intelligent manufacturing rely heavily on robotic assembly. For the plan and design of automated manufacturing operations, robust coordination of control modules and robotic arms is required. Based on the physical characteristic of robotic arms, Ying, K.-C., et al. have conducted research on metaheuristic which is based on Cyber-Physical Assembly System (CPAS) [27].
An entirely new type of robot with the capability of collaborating with humans, called cobot is required in HRC applications. For humans few assembly tasks are tiring and monotonous. Thus, different approaches to overcome the challenges of identifying and selecting the correct task allocation between cobots and human operators have been stated by many of the researchers. Gjeldum, N., et al. have presented task allocation procedure for identifying different improvement options by utilizing cobots to perform different tasks in the assembly line. Based on the HUMANT algorithm, a decision support system has been used to select the best compromise solution [28].
Cobots have become potential field of research interest because of its diverse applications. Yet, it is challenging for the experts to reduce the programming effort through natural modes of communication. Akkaladevi, S.C., et al. have focused on demonstrating different user interfaces for non-programming experts to help with easy programming for the complex robotic tasks [29].
However, several advancements have been documented in the history of industrial robotics to improve human-robot collaboration. Different communication approaches were used to investigate these collaborations. The majority of these communication channels were designed with the goal of developing a simple and reliable method of connection. This interaction should allow to jog a robot, teach it the required path, and then have it perform the deployed software [30].
2. Review
2.1. Methodologies
2.1.1. Human-Robot Collaborative Method
There is a lot of research on HRC methodologies, and it's been going on for a long time [31]. Gestures are one of the most prevalent techniques to help people [32,33,34,35]. Offline programming, on the other hand, is energy-intensive and insecure, and the robot functions used were quite restricted. As a result, HRC approaches have been developed which are largely dependent on multimodal voice fusion and bodily motions [36,37,38,39,40].
Furthermore, a significant amount of research works has focused on the utilization of brain signals to operate robots [41,42,43]. Recently, a growing number of researchers have concentrated on context-aware in HRC systems [44,45,46], with the goal of increasing robot cognitive abilities. Digital twin (DT) technology, on the other hand, can effectively provide data relevant to the specific job of manufacturing operation [47]. The application of HRC and DT helps towards the stability of human-robot workload by boosting operational efficiency [48,49].
Also, when a robot has to execute certain activities in a human-robot cooperation situation, the robot should identify human intent for helping humans more effectively and efficiently. The link between the skeleton-based sequence of human motion and human purpose may provide a way for the robot to identify human intent. A deep long short-term memory (LSTM) neural network method was introduced by Yan, L., et al. for recognizing human intention in a study. Given the properties of a deep LSTM neural network, it was often a multiple stacked LSTM model that combined the benefits of a single LSTM layer while overcoming the RNN's limitation of learning long-range temporal dependencies. Even though just 40% of motion sequences were used in the experiments, the deep LSTM network with 2-layers had greater prediction performance [12].
2.1.2. Task Allocation
Prior to adopting collaborative activities, the HRC technique must be used to assign human-robot subtasks. The purpose is to achieve efficient assembly using improved work allocation mechanisms. The rating of different tasks can be done with established data in terms of task allocation [50]. Although being a straightforward approach, this process is inefficient, particularly in terms of items having complicated architectures and a high number of pieces. Additionally, the decision-making approaches for simulating job allocation procedures have been created [51,52]. Also, evolutionary algorithms are frequently employed for HRC to tackle the Assembly Line Balancing Problem (ALBP) [53,54]. A hierarchical approach based multi-robot allocation method was proposed by Choudhury et al. [55] to handle successive decision-making issue in the presence of uncertainty and multi-agent cooperation. Human subjective impressions, on the other hand, contribute to varying levels of willingness to work on different activities during dynamic task execution. Furthermore, it is observed the robot's capacity to do various jobs within the specific areas differs. Consequently, a work partition plan based on the human stability model is more plausible.
Gjeldum, N., et al. presented task allocation procedure for HRC implementation in the assembly system by integrating identification of assembly step to be automated on the one side and holistic selection process of the assembly step to be automated according to multiple criteria decisions, on the other side. They provided a framework to companies having little experience and limited resource to start with HRC implementation warily by considering both the expected benefits and drawbacks. The increase in productivity with the implementation of HRC is established by scientific community considering the motoric strengths, complementing sensory and ergonomic limitations of human workers [28].
2.1.3. Reinforcement Learning
Giving the learning ability to robots is a more sophisticated approach to achieve intelligence. By transferring human operational works to a robot, the robot may use reinforcement learning algorithms to continually interact with its surroundings to expanding reward or achieving specified objective [56]. A teaching format is based on task modeling and execution, two aspects of interaction-based reinforcement learning [57]. Reinforcement learning has been used on robots by AI for grasping activities with a single robot and collaborative work with numerous robots [58,59]. Oliff et al. worked on the goal to control the HRC's human aspect of uncertainty. It boosted flexibility and autonomy of robot decision-making [60]. Although the precision of the agent's decision-making has increased, it is not relevant to all challenging circumstances. The unsolvable challenge of complicated human behavior and environmental models continues.
In HRC assembly tasks, the research of Zhang, R., et al. provided a method of reinforcement learning to determine appropriate human-robot sequence of action. The interaction of the task environment with the reinforcement learning methods can effectively reduce human mental work to achieve optimal collaboration strategies. This study worked with the agent based human-robot collaborative reinforcement learning to guide human operators to collaborate among different agents [3].
2.1.4. CPS-based Robotic Assembly Sequence Planning Approach
Cyber-Physical Systems (CPS) are the basis in the intelligent and flexible manufacturing development. Ying, K.-C., et al. suggested an assembly approach of sequence planning based on Cyber-Physical Assembly System (CPAS) towards interference relations and the characteristics of robotic arms between the assembly components. The proposed approach providing a better assembly sequence than the traditional method of the single-armed robot to effectively execute the resulting assembly plan. In the assembly sequence planning application, numerical analysis of CPAS has verified more efficiency than the most commonly applied interactive methods. Towards an accurate and well-organized planning process, the numerical analysis has demonstrated the proposed approach’s efficacy on the robotic arms’ technical feature in the operational environment [27]. The study of Wang, X.V., et al. gave an HRC overview with categorization and focus on assembly jobs. Aside from establishing essential terminology and relationships, the study also suggested ways to describe HRC that may be used throughout solution development [8].
2.1.5. HRC Assembly using Artificial Intelligence and Wearable Devices
Presently researchers have been taking advantage of artificial intelligence (AI) in HRC applications in terms of task planning and allocation of tasks among humans and robots, cognition to enable autonomy, and operator support. Dimitropoulos, N., et al. explored an AI system for improving ergonomics and operator’s satisfaction through recognizing the actions being performed by operators in a human–robot collaborative cell. The research team demonstrated successful use of high payload collaborative robotics in elevator manufacturing operation with an improvement in ergonomics by 80% of the sample and in cycle times by 6%. With the current shift of industry from manual production or totally automated production towards hybrid solutions, the proposed solution sets the stage to bring the industry closer to the widespread adoption of human-robot collaborative solutions, by making robots work seamlessly alongside humans. The equipping requirement of robots having cognitive capabilities in the seamless human–robot collaboration enabled the environment awareness with the actions in the assembly cell. The proposed AI-based system of Dimitropoulos, N., et al. can detect the process status and operator status for the identification of the tasks executed by the operator [18].
2.1.6. Programming-Free Approaches for HRC Assembly Tasks
Akkaladevi, S.C., et al. focused on the efficient installation and requirement of HRC in manufacturing applications. They demonstrated an in-depth review with the novel interfaces to improve the current approaches. The introduction of different programming interfaces and paradigms was the purpose of the research to help non-experts in terms of easy robot programming [29].
2.1.7. Intelligent Assembly enabled by Brain EEG
The interactions between an industrial robot and a human’s electroencephalography (EEG) signals have been facilitated by an intelligent HRC assembly framework. The capability of the operator was explored by Mohammed, A. and L. Wang for controlling the robot through individual brain signal. The objective of the research was to improve the adaptability and quality of HRC operations [30].
2.1.8. Human-Robot Collaboration for Disassembly (HRCD)
Remanufacturing aims towards increasing resource use and lowering manufacturing costs. Disassembly is a crucial phase in the remanufacturing process, and it is always completed by hand or by robots. Manual disassembly is inefficient and expensive, while robotic disassembly isn't versatile enough to tackle complicated disassembly jobs. As a result, HRCD is suggested to conclude the disassembly process in remanufacturing in a flexible and efficient manner. The Pareto-based algorithm was used in the study of Xu, W. et al. to solve disassembly sequence planning (DSP) for HRC. To begin, the disassembly model was designed to produce plausible disassembly sequences. The disassembly jobs were then categorized based on how tough they were to disassemble. After that, DSP for HRC solutions were developed and assessed. MDBA-Pareto was presented to search for the ideal methods. Simplified computer case studies were conducted to verify the given approach [1].
2.1.9. Human Activity Pattern Prediction for HRC Assembly Tasks
It is inevitable that robots and humans will share the workplace in future production environments. However, actual collaboration might be intermittent, particularly in assembly activities that may need independent actions to be carried out by either human worker or robot. According to the study of Zanchettin, A.M., et al., it may be advantageous to forecast the human's behaviors for managing robot effectively. They offered an approach for predicting the activity of human so that the robot may forecast and execute independent activities according to the human collaborative action request [11].
2.1.10. Intuitive and Robust Multimodal Robot Control
The cornerstone to HRC in manufacturing is multimodal robot control which is intuitive and robust. Previous research has established multimodal robot control approaches. Human operators may manage robots intuitively without having to create brand-specific code using these strategies. However, most multimodal robot control approaches are inaccurate because of non-exchanging feature representations within the modalities. The research of Liu, H., et al. proposed multimodal fusion approach based on deep learning for robust multimodal HRC systems to address this challenge. Training of few unimodal models initially was conducted for the features extraction before being merged for representation sharing. The suggested method outperformed the unimodal models in experiments. The suggested multimodal fusion architecture had a lot of promise for use in robust HRC production systems [36].
2.2. Experiments
The manufacturing assembly is becoming more dynamical with modern industry's inclination towards personalization. Different manufactured goods can, however, be constructed on the same workstation due to the commonality of the constraint relationships. HRC had been given a reinforcement learning mechanism, which had been tested in assembly. The goal of the research of Zhang, R., et al. was to solve the work assignment and sequence optimization problems. The study described the implementation abilities of human-robot in several assembly processes. The proposed approach outperformed multi-objective reinforcement learning algorithms in terms of training process curve efficiency. The proposed solution eliminates the need for human decision-making, minimizes the effort of the management, and eliminates inefficient sequencing. The operator is immediately provided with the assembly sequence for the proposed approach through a visual interface, and all he or she needs to do is follow Agent-choice [3].
Autonomous robotic operators have become commonplace in many modern manufacturing. In spite of that, the human operator number is still significant in the industry, and consequently, human-robot contact number has grown in this context. This is a concern because, in the form of performance variance, humans add a source of disruption and unpredictability to these systems. Regardless of the flexible innate nature of human, the presence of the human operators in the system causes disruption and makes these complex processes much difficult, if not impossible. To Improve the capacity of robotic operators in adjusting behavior towards human job differences is thus fundamental hurdle that must be addressed. The creation of a framework for properly modelling complex systems with the capability of autonomous decision-making was presented in the work of Oliff, H., et al. This decision-making approach gave robotic operators more flexibility by allowing them to adjust their behavior based on inputs from their environment and human counterparts. The research advanced a theoretical understanding of how learning approaches might be applied to better human-robot interaction. The research also proposed a revolutionary way for implementing an intelligent agent that allows robotic operators to adjust their behavioral strategy in reaction to human colleagues' performance variations. A generalized simulation model was used to help the development and assessment, and it was parameterized to allow for suitable variance in the performance of human [60].
It is critical to provide robots with the ability to predict human intention even before the full action is finished in order to improve human-robot collaboration. The research of Yan, L., et al. proposed a deep LSTM neural network for human intention identification based on skeletal knowledge of human movements. The impact of network depth on network performance was investigated. The results showed that the deep LSTM network with two layers outperformed the other layers and that the robot could grasp the human purpose when only 40% of the motion sequence was employed [12].
In the development of intelligent and flexible production towards Industry 4.0, CPSs are critical for connecting the virtual and real worlds. They modify operating parameters based on feedback from intelligent systems and instruments. Ying, K.-C., et al. demonstrated the characterization of the efficient manufacturing assembly sequence. They determined the decrease in collision during dual-projection methodology in comparison to prevailing approaches by using two case situations. The numerical analysis also revealed that the suggested method adequately compensates robot arms’ practical characteristics as well as the process setting for providing a smooth process of planning. Also, CPAS provides more effective assembly sequences in less time through the reduction in directional change of manufacturing assembly process [27].
Recent assembly trends indicate a more adaptable process setting in which machines and human work together. Instead of constraining each other, symbiotic HRC allows robot and people for combining their corresponding skills. By defining the collaboration scenario, establishing the needs, and merging infrastructural aspects to a functional solution may build in an organized manner. The study of Wang, X.V., et al. outlined a method for the description of a case and outlined characteristic needs for providing an explanation with the recommended configuration [8].
Dimitropoulos, N., et al. included the change of the assembly task sequence in his study initiated arbitrarily by one operator and followed by the compliance of the second, without verbal communication in a case of collaborative behavior. A high payload collaborative robot was illustrated through transferring this notion to the HRC case (Figure 2) to continuously monitor the workflow execution status by using information from equipment controllers, process sensors, and direct human input as well as data from wearable devices [18].
Gjeldum, N., et al. have developed the procedure comprising of three major steps. According to the previous knowledge on existing production performance metrics and strategic goals, the production line has been selected in first step for cobot task allocation. As a group of production workstations, i.e., manufacturing or assembly workstations, this approach considers an overall production line or assembly line to produce certain products or product family. For improving work quality in the second step, the determination of process tasks allocation is conducted by considering the actual capability of both human and robot. In the third step, metrics revealed from prediction tools in case of implementation of each developed option are utilized as the input data for the decision support system [28].
Akkaladevi, S.C., et al. detailed different programming approaches to depend on the programming paradigms and interfaces by allowing non-experts to easily program robot tasks [29].
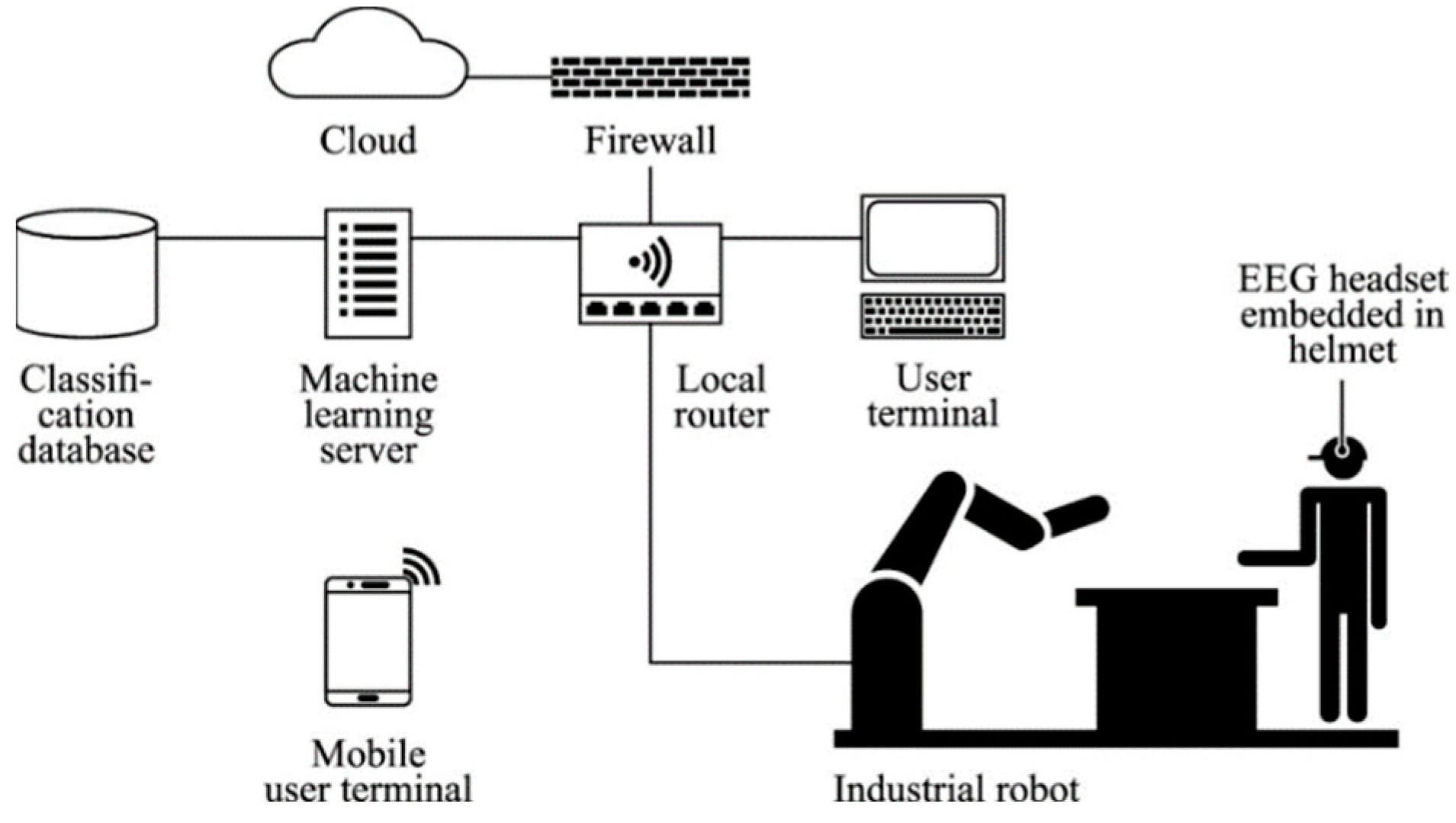
The research of Mohammed, A. and L. Wang, demonstrated a setup for the evaluation of the performance and training of the system. The setup of the experiment in a central server for executing machine learning algorithms is shown in Figure 3 [30].
In the work of HRCD by Xu, W. et al. MDBA-Pareto was used to solve DSP for HRC. To begin, EOL product disassembly precedence connections were developed. According on the complexity of disassembly, jobs were divided into three groups. The DSP for HRC solutions were then developed and assessed. The development of MDBA-Pareto was conducted for identifying optimal DSP solution for HRC using Bees adjustment and Lévy flight techniques. Finally, the suggested strategy was tested through case study and the findings reveal that the suggested approach has a higher solution quality than the other three optimization techniques [1].
However, Liu, H., et al. suggested multimodal HRC fusion architecture in study of multimodal robot control. The training of 3 unimodal models were conducted to suit three modalities’ datasets: a Convolutional Neural Network (CNN) model for voice commands, a Long short-term memory (LSTM) model for hand movements, and a Multilayer Perceptron (MLP) for the motion of body. These models were further connected and merged after unimodality model training. Experiments showed that the fused model outperformed unimodal models in terms of accuracy. The study showed the high potential of the suggested technique in manufacturing [36].
3. Future Trends
According to the review of the current research, studies have generally focused on single or set tasks. For dynamic circumstances with many duties, there is a scarcity of in-depth study. Furthermore, many collaborative systems depend on technologies primarily based on fixed features or human-controlled robots. Nevertheless, the great portion of decisions are made by humans, and the industrial robots who help them lack intelligence. In the context of future manufacturing, the integration of sustainable approaches like the circular economy [61] could revolutionize the manufacturing process [62], leading to efficient manpower management and facilitating seamless human-robot collaboration.
The work done by Zhang, R., et al. will look at ways in the computation and update of the real operational time and the utilization of resource during HRC in the future. Numerous factors should be remembered, such as product qualities and process modifications, to influence the actual completion time. Furthermore, the duration of repeated human operations varies. In addition, for the best cooperation tactics, more complicated assembly activities would be specified utilizing a graph-based methodology [3].
The study of Ying, K.-C., et al. may be expanded in a number of ways. Firstly, their suggested technique may be extended by incorporating the component coordination system in cases when the directions of assembly are not specified in Cartesian coordinates. Secondly, while designing optimum assembly sequences, applying new and different performance criteria applicable to single and double-arm robots may improve accuracy, speed, and cost. Thirdly, for the improvement of the intelligence of the assembly sequence planning, the creation of robot assembly code is worth exploring. If assembly sequence planning can transform assembly sequences into robot instructions by adding extra information, the process from CAD file to product might become faster and more intelligent [27].
The researchers can work on the implementation of algorithms to capture more complex—non-assembly-based—human actions in order for the system to either ignore them or plan for countering their effects. Moreover, the virtual mannequin used for simulations will have the capability to adapt to the exact dimensions of the operator, so more accurate simulations of ergonomics can be explored. Additionally, the investigation of additional wearable hardware, such as IMUs on a wristband, for highly granular detection of human posture is required. Extensions for ensuring the safety of the operators in a certified way must also be implemented [18].
The development of adaptive integrative simulation models of Gjeldum, N., et al. to enable the algorithm for the selection of a roadmap of generated options can be explored in the future to avoid the iterative application of the procedure [28].
However, regarding the work of Xu, W. et al. on HRCD, the fatigue of the shop floor operators may take into account in the future. The DSP for HRC will then be solved while taking into account the operator's weariness. To maintain the operator's safety, robot movement throughout the disassembly should steer clear of the end-of-life (EOL) items and also the operators. Mobility of the operator is more complex in the disassembly process than it was in this study. As a result, the human operator must be seen as dynamical impediment, whereas the products should be treated as stationary one. As a result, DSP for HRC will be investigated in the future, taking into account the robots' safe moving trajectory. In this research, a case study was done using a simplified computer scenario, and several optimization methods were set side by side. More case studies must be conducted in the future, and more optimization techniques should be compared to the proposed methodologies [1].
There are some future improvement scopes in the work of Liu, H., et al. on robust multimodal HRC. The suggested architecture can be implemented in a real-time scheme. The theoretical elements and the model architecture can be investigated to explain neural networks by incorporating various modalities for HRC robot control [36].
4. Conclusion
The application of HRC in the complex assembly process would result in the improvement of efficiency by reducing human workload. However, it is quite challenging in terms of industrial robots to comprehend the intents of the processes due to the unpredictable human behavior in the manufacturing assembly activities. Thus, it is quite difficult to collaborate humans and robots in the industrial applications. So, the objective of the project was to review the latest technologies in the scientific community regarding effective implementation of HRC in the manufacturing assembly tasks. The project emphasized on the comprehensive review of the recent methodologies in the human-robot collaboration application for the manufacturing assembly tasks.
References
- Xu, W., et al., Disassembly sequence planning using discrete Bees algorithm for human-robot collaboration in remanufacturing. Robotics and Computer-Integrated Manufacturing, 2020. 62: p. 101860. [CrossRef]
- Mateus, J.E.C., et al., Method for transition from manual assembly to human-robot collaborative assembly. IFAC-PapersOnLine, 2018. 51(11): p. 405-410. [CrossRef]
- Zhang, R., et al., A reinforcement learning method for human-robot collaboration in assembly tasks. Robotics and Computer-Integrated Manufacturing, 2022. 73: p. 102227. [CrossRef]
- Wang, L., et al. Overview of human-robot collaboration in manufacturing. in Proceedings of 5th international conference on the industry 4.0 model for advanced manufacturing. 2020. Springer.
- Thiruvady, D., A. Nazari, and A. Elmi. An Ant Colony Optimisation Based Heuristic for Mixed-model Assembly Line Balancing with Setups. in 2020 IEEE Congress on Evolutionary Computation (CEC). 2020. IEEE.
- Gualtieri, L., et al., Safety, ergonomics and efficiency in human-robot collaborative assembly: design guidelines and requirements. Procedia CIRP, 2020. 91: p. 367-372. [CrossRef]
- Li, K., et al., Sequence planning considering human fatigue for human-robot collaboration in disassembly. Procedia CIRP, 2019. 83: p. 95-104. [CrossRef]
- Wang, X.V., et al., Human–robot collaborative assembly in cyber-physical production: Classification framework and implementation. CIRP annals, 2017. 66(1): p. 5-8. [CrossRef]
- Yu, T., J. Huang, and Q. Chang, Mastering the working sequence in human-robot collaborative assembly based on reinforcement learning. IEEE Access, 2020. 8: p. 163868-163877. [CrossRef]
- Rahman, S.M. and Y. Wang, Mutual trust-based subtask allocation for human–robot collaboration in flexible lightweight assembly in manufacturing. Mechatronics, 2018. 54: p. 94-109. [CrossRef]
- Zanchettin, A.M., et al., Prediction of human activity patterns for human–robot collaborative assembly tasks. IEEE Transactions on Industrial Informatics, 2018. 15(7): p. 3934-3942. [CrossRef]
- Yan, L., et al. Human-Robot Collaboration by Intention Recognition using Deep LSTM Neural Network. in 2019 IEEE 8th International Conference on Fluid Power and Mechatronics (FPM). 2019. IEEE.
- Chowdhury, H. and M.T. Islam. Multiple Charger with Adjustable Voltage Using Solar Panel. in International Conference on Mechanical Engineering and Renewable Energy 2015 (ICMERE2015). 2015. Chittagong University of Engineering and Technology.
- Nian, R., J. Liu, and B. Huang, A review on reinforcement learning: Introduction and applications in industrial process control. Computers & Chemical Engineering, 2020. 139: p. 106886. [CrossRef]
- Papakostas, N., C. Constantinescu, and D. Mourtzis, Novel Industry 4.0 Technologies and Applications. 2020, Multidisciplinary Digital Publishing Institute.
- Matheson, E., et al., Human–robot collaboration in manufacturing applications: a review. Robotics, 2019. 8(4): p. 100. [CrossRef]
- Dimitropoulos, N., G. Michalos, and S. Makris, An outlook on future hybrid assembly systems-the Sherlock approach. Procedia Cirp, 2021. 97: p. 441-446. [CrossRef]
- Dimitropoulos, N., et al., Seamless Human–Robot Collaborative Assembly Using Artificial Intelligence and Wearable Devices. Applied Sciences, 2021. 11(12): p. 5699. [CrossRef]
- Richardson, B.S., et al., The design of an additive manufactured dual arm manipulator system. Additive Manufacturing, 2018. 24: p. 467-478. [CrossRef]
- Omer, L., et al. Induction Initiated Curing of Additively Manufactured Thermoset Composites. in Solid Freeform Fabrication 2022: Proceedings of the 33rd Annual International Solid Freeform Fabrication Symposium – An Additive Manufacturing Conference. 2022.
- Whitney, D., et al., Comparing robot grasping teleoperation across desktop and virtual reality with ROS reality, in Robotics Research. 2020, Springer. p. 335-350.
- Michniewicz, J. and G. Reinhart, Cyber-Physical-Robotics–Modelling of modular robot cells for automated planning and execution of assembly tasks. Mechatronics, 2016. 34: p. 170-180. [CrossRef]
- Repta, D., et al. A cyber-physical systems approach to develop a generic enterprise architecture. in 2014 International Conference on Engineering, Technology and Innovation (ICE). 2014. IEEE.
- Napoleone, A., M. Macchi, and A. Pozzetti, A review on the characteristics of cyber-physical systems for the future smart factories. Journal of manufacturing systems, 2020. 54: p. 305-335. [CrossRef]
- Lu, Y. and X. Xu, Resource virtualization: a core technology for developing cyber-physical production systems. Journal of manufacturing systems, 2018. 47: p. 128-140. [CrossRef]
- Michniewicz, J. and G. Reinhart, Cyber-physical robotics–automated analysis, programming and configuration of robot cells based on Cyber-Physical-Systems. Procedia Technology, 2014. 15: p. 566-575. [CrossRef]
- Ying, K.-C., et al., Cyber-physical assembly system-based optimization for robotic assembly sequence planning. Journal of Manufacturing Systems, 2021. 58: p. 452-466. [CrossRef]
- Gjeldum, N., et al., Collaborative robot task allocation on an assembly line using the decision support system. International Journal of Computer Integrated Manufacturing, 2021: p. 1-17. [CrossRef]
- Akkaladevi, S.C., et al., Programming-free approaches for human–robot collaboration in assembly tasks, in Advanced Human-Robot Collaboration in Manufacturing. 2021, Springer. p. 283-317.
- Mohammed, A. and L. Wang, Intelligent human–robot assembly enabled by brain EEG, in Advanced Human-Robot Collaboration in Manufacturing. 2021, Springer. p. 351-371.
- Gualtieri, L., et al., An evaluation methodology for the conversion of manual assembly systems into human-robot collaborative workcells. Procedia Manufacturing, 2019. 38: p. 358-366. [CrossRef]
- Liu, H. and L. Wang, Gesture recognition for human-robot collaboration: A review. International Journal of Industrial Ergonomics, 2018. 68: p. 355-367. [CrossRef]
- Gustavsson, P., et al., Human-robot collaboration demonstrator combining speech recognition and haptic control. Procedia CIRP, 2017. 63: p. 396-401. [CrossRef]
- Mei, K., et al., Training more discriminative multi-class classifiers for hand detection. Pattern Recognition, 2015. 48(3): p. 785-797. [CrossRef]
- Xin, X., et al., Semi-supervised person re-identification using multi-view clustering. Pattern Recognition, 2019. 88: p. 285-297. [CrossRef]
- Liu, H., et al., Towards robust human-robot collaborative manufacturing: Multimodal fusion. IEEE Access, 2018. 6: p. 74762-74771. [CrossRef]
- Liu, H. and L. Wang, An AR-based worker support system for human-robot collaboration. Procedia Manufacturing, 2017. 11: p. 22-30. [CrossRef]
- Liu, H. and L. Wang, Human motion prediction for human-robot collaboration. Journal of Manufacturing Systems, 2017. 44: p. 287-294. [CrossRef]
- Wang, P., et al., Deep learning-based human motion recognition for predictive context-aware human-robot collaboration. CIRP annals, 2018. 67(1): p. 17-20. [CrossRef]
- Zhang, J., et al., Recurrent neural network for motion trajectory prediction in human-robot collaborative assembly. CIRP annals, 2020. 69(1): p. 9-12. [CrossRef]
- Mohammed, A. and L. Wang, Brainwaves driven human-robot collaborative assembly. CIRP annals, 2018. 67(1): p. 13-16. [CrossRef]
- Mohammed, A. and L. Wang, Advanced Human-Robot Collaborative Assembly Using Electroencephalogram Signals of Human Brains. Procedia CIRP, 2020. 93: p. 1200-1205. [CrossRef]
- Zhao, S., et al., Brain–machine interfacing-based teleoperation of multiple coordinated mobile robots. IEEE Transactions on Industrial Electronics, 2016. 64(6): p. 5161-5170. [CrossRef]
- Liu, H. and L. Wang, Collision-free human-robot collaboration based on context awareness. Robotics and Computer-Integrated Manufacturing, 2021. 67: p. 101997. [CrossRef]
- de Giorgio, A., M. Lundgren, and L. Wang, Procedural knowledge and function blocks for smart process planning. Procedia Manufacturing, 2020. 48: p. 1079-1087. [CrossRef]
- Nan, Z., et al., Learning to infer human attention in daily activities. Pattern Recognition, 2020. 103: p. 107314. [CrossRef]
- Chowdhury, H., Semiconductor Manufacturing Process Improvement Using Data-Driven Methodologies, in Preprints. 2023, Preprints.
- Bilberg, A. and A.A. Malik, Digital twin driven human–robot collaborative assembly. CIRP Annals, 2019. 68(1): p. 499-502. [CrossRef]
- Malik, A.A. and A. Brem, Digital twins for collaborative robots: A case study in human-robot interaction. Robotics and Computer-Integrated Manufacturing, 2021. 68: p. 102092. [CrossRef]
- Malik, A.A. and A. Bilberg, Collaborative robots in assembly: A practical approach for tasks distribution. Procedia Cirp, 2019. 81: p. 665-670. [CrossRef]
- Chen, F., et al., An assembly strategy scheduling method for human and robot coordinated cell manufacturing. International Journal of Intelligent Computing and Cybernetics, 2011. [CrossRef]
- Tsarouchi, P., et al., On a human-robot collaboration in an assembly cell. International Journal of Computer Integrated Manufacturing, 2017. 30(6): p. 580-589.
- Bänziger, T., A. Kunz, and K. Wegener, Optimizing human–robot task allocation using a simulation tool based on standardized work descriptions. Journal of Intelligent Manufacturing, 2020. 31(7): p. 1635-1648. [CrossRef]
- Dalle Mura, M. and G. Dini, Designing assembly lines with humans and collaborative robots: A genetic approach. CIRP Annals, 2019. 68(1): p. 1-4. [CrossRef]
- Choudhury, S., et al., Dynamic multi-robot task allocation under uncertainty and temporal constraints. Autonomous Robots, 2021: p. 1-17.
- Arana-Arexolaleiba, N., et al., Transferring Human Manipulation Knowledge to Industrial Robots Using Reinforcement Learning. Procedia Manufacturing, 2019. 38: p. 1508-1515. [CrossRef]
- Akkaladevi, S.C., et al., Towards reinforcement based learning of an assembly process for human robot collaboration. Procedia Manufacturing, 2019. 38: p. 1491-1498. [CrossRef]
- Fan, L., et al. Surreal: Open-source reinforcement learning framework and robot manipulation benchmark. in Conference on Robot Learning. 2018. PMLR.
- Tung, A., et al. Learning multi-arm manipulation through collaborative teleoperation. in 2021 IEEE International Conference on Robotics and Automation (ICRA). 2021. IEEE.
- Oliff, H., et al., Reinforcement learning for facilitating human-robot-interaction in manufacturing. Journal of Manufacturing Systems, 2020. 56: p. 326-340. [CrossRef]
- Chowdhury, H. and B. Asiabanpour, A Smart Circular Economy for Integrated Organic Hydroponic-Aquaponic Farming. 2023, Texas State University.
- Chowdhury, H., Circular Economy Integration in Additive Manufacturing, in Preprints. 2023, Preprints.
Figure 2.
The components and operations of an HRC system.
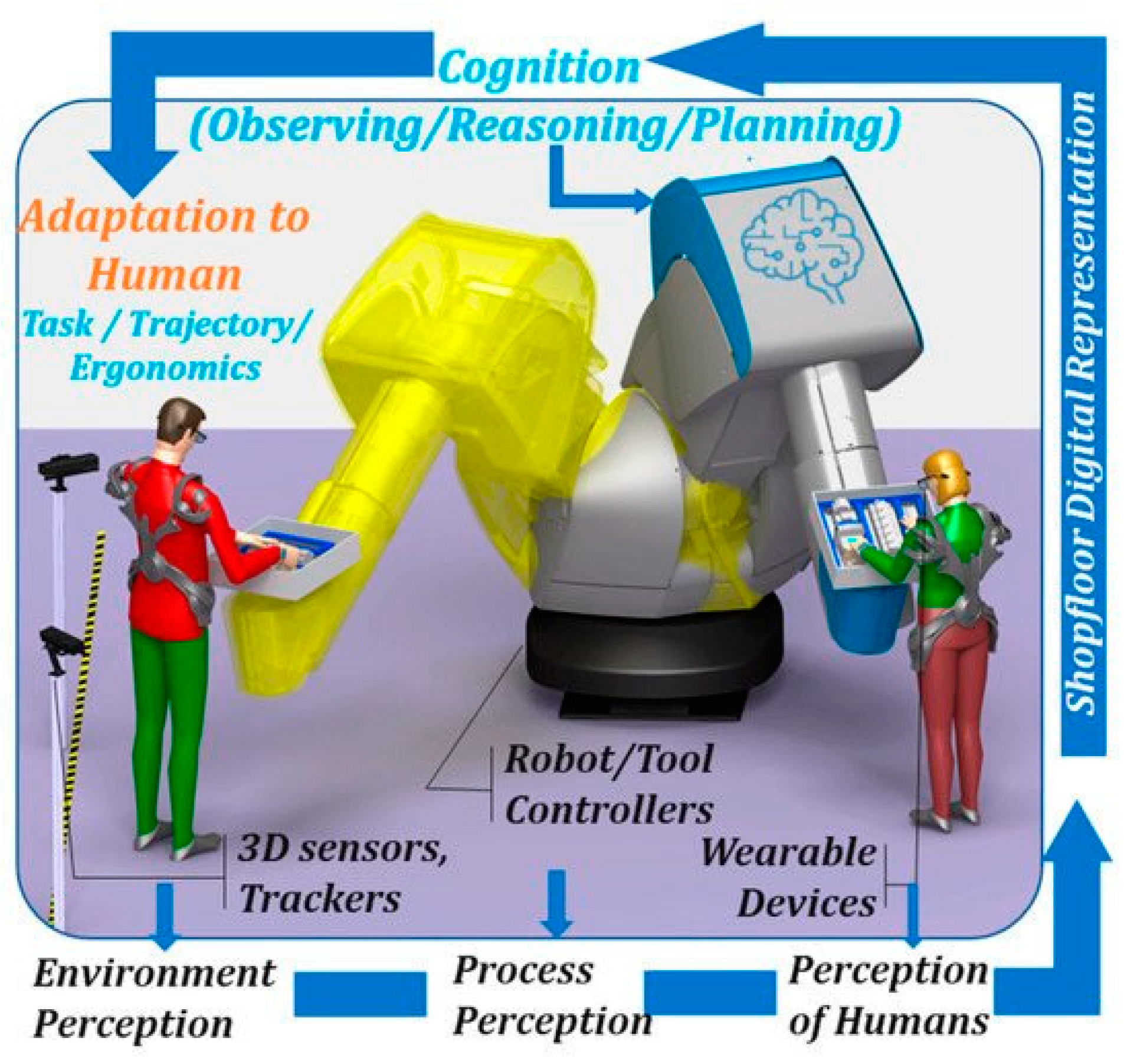
Figure 3.
The network infrastructure mechanism for brain–robot interface.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



