
Submitted:
28 September 2023
Posted:
30 September 2023
You are already at the latest version
Abstract
In recent years, the application of Indoor Positioning Systems (IPS) has experienced a significant increase in demand, with the aging of the world’s population and their changing lifestyles. While outdoor positioning systems, such as the Global Positioning System (GPS), have significantly advanced over the years, indoor positioning has been restrained by the limitations of the employed technologies. This paper presents a hybrid wireless positioning system able to locate wearables indoor accurately. It is based on the Wi-Fi and Bluetooth technologies, by using trilateration to determine the position of Bluetooth low energy (BLE) wearable devices with an accuracy of up to 1.8 meters. A graphical user interface (GUI) was used to illustrate the performance of the proposed systems, by allowing users to visualize the captured data in two dimensions and three- dimensions in real-time.
Keywords:
indoor positioning system
; Bluetooth
; Wi-Fi
; wearables
; energy efficiency
1. Introduction
Human activity and movement monitoring is a process that could reveal what is challenging to diagnose in a single instance, prevent accidents and limit risk for specific individuals. As it is deeply linked to the physiological feedback of each person’s body, it can be studied using unobtrusive sensors by using wearable technologies. With the ageing of the world population, the rise of the internet of things (IoT), the cost decrease of data analysis at the edge, and the automation of many services in today’s world, the potential applications for indoor positioning are increasing drastically. Wearable technologies are identified as one of the most promising sectors for assisted living technologies, as they allow for the collection of sensor data directly from the body and provides efficient communications protocols which can also be used for location tracking. It also benefits from being versatile in many ways: It can be unobtrusive for the wearer, is battery powered, allows for different body placements, and comes in various shapes and forms [1]A set of different wearable solutions were investigated, from developer kits (Hexiwear, Silicon Labs’ Thunderboards, NRF52840) to off-the-shelves commercial and industrial solutions (Fitbit & Kontakt.io Beacons and wearables). All these solutions use BLE as the primary wireless communication protocol, which allows monitoring an individual’s position in space [2,3,4,5,6]. With BLE enabled wearables, it is possible to monitor an individual’s position indoors, as well as continuously collect sensor data to ensure their wellbeing. The solution is implemented for testing purposes, in an office building with a layout like the one shown in Figure 1.
Figure 1 demonstrates the positioning of a set of beacons in a house floor plan; They are wall-mounted devices that monitor an area and report the data collected from wearables as well as the distance from them to the base station, that will send the entire packet to the cloud for analysis. Beacons are both BLE enabled and Zig-Bee compatible.
Human positioning methods, from GPS to activity trackers, most often use wireless communication protocols due to their numerous advantages over wired methods. Moreover, depending on the parameters of the application, many different protocols can be used. Wearables are the most common type of technologies used for monitoring human activity and gathering data on individuals is increasingly processed using mobile technologies. Due to their numerous advantages, such as small size, portability, low power consumption, and low cost, wearable technologies have been increasingly used in a variety of applications[7]. For example, the Sensor-based Human Activity Recognition (S-HAR) field is starting to be supported by wearables over video analytics. When compared to video-based systems, wearable technologies offer greater flexibility, less complexity, a lower need for calibration or data storage, and can capture precise data instead of entire scenes. It mostly has a strong impact when mobility is of importance [8]. Due to its approach to capturing data of only the required characteristics, the necessary bandwidth is greatly minimised. power management is a challenge when developing or using wearable solutions due to its various form factors. Over the last 20 years, there has been substantial advancement to reduce the size and maximise the efficiency of batteries which now make wearable technologies a strong contender in a large variety of fields. New methods are still being developed to overcome this situation further and eliminate the need for a charging cycle or replacement battery, such as the energy-harvesting modules discussed in[9,10,11], which presented designs of arrays which match a crucial point that can be used to obtain maximum energy transfer from a rectenna to a load. Loads are represented within this context as typical DC to DC boost power converters modelled by an equivalent input impedance. According to [12], Bluetooth technology offers a flexible and applicable technology for the development of indoor positioning systems, where results from the study demonstrated its operational effectiveness in intralogistics applications. This paper thus presents a low-cost energy efficient hybrid wireless positioning system using Wi-Fi and Bluetooth technologies for wearables. The motivation for addressing this issue is based on the observations in [13], whose study determined that there is no clear interface in research capable of extending indoor positioning systems (IPS) into an indoor location-based services (ILBS). Thus, this study proposed to utilize methods that form the background for an ILBS in the implementation of a hybrid positioning system. A Scented Kalman filter is used to smoothen the Received Signal Strength Indicator (RSSI) measurements from stationary nodes. Where the RSSI values are used for colocation of the mobile beacons (wearables). The adopted approach is aimed at improving range of detection with accuracy at low power consumption and cost. The result shows that the proposed technique achieves higher accuracy in detection and location of object at significantly lower energy consumption. This improves the energy efficiency of the beacons, and their battery lives which is crucial in many applications including care homes, compared to the state-of-the-art beacon-based positioning systems.
2. Literature Review
The most practical wireless protocol for location tracking used today is BLE[14] . It is derived from Bluetooth and has a lower power consumption. Due to its origins, it is compatible with most Bluetooth capable devices and services and has been highly popular in consumer electronics for the last ten years. In the proposed solution BLE has been selected as the communications protocol that will be tracked. It is highly flexible in its support of network topologies, has a strength indicator marker easily accessible (required for distance estimation), is low power and low-cost [15]. When comparing the multitude of wireless location tracking methods, it came to attention that the same method can be used over different protocols. The architecture is also similar from one method or technology to another; For instance, there are usually a transmitting device and a set of receiving devices, known as beacons and gateways. The beacon is transmitting a signal, and the gateways will use characteristics of the sent signal to determine the relative position of the beacon or the other way around. The gateways or the beacons also need to have a fixed or known location, so the position of the mobile device can be determined.
Hence, with a single type of hardware, a selection of tracking methods is available depending on their characteristics. It depends on the number of antennae or the protocols in use, and includes but is not limited to:
- The angle of signal departure or arrival
- Time of signal departure arrival
- The difference of any of the above
- Power of the signal at reception
- Signal power difference
Time of Arrival (ToA or ToF) is the time of travel of a radio signal from source to receiver. It uses the absolute time of arrival, instead of the time difference between departure and arrival as in TDoA [16]. The distance is calculated from the time of arrival using the known velocity of the signal. Using two devices allow for two distances to be known and limit the potential position to two points. It is then up to a third device to determine the position of the device, as it is used in GPS technologies. Multi-Angulation is the intended process by which the relative physical location of objects is determined by analysing the signals sent or received when knowing the angles at which the signals were sent or by which they are received, while Multi-Lateration is a geometric process of determining the location of points by measurement of distances. Trilateration can use circles, spheres, or triangles to determine the position of the points, but it is more convenient and accurate to use circles for multi-lateration. When using a multi-lateration method in location tracking of devices with wireless technologies, the Received Signal Strength Indicator (RSSI) is used instead of distance.
Over the years, many methods have been employed to build IPS in 2-D and 3-D, frequently derived from standard positioning system such as GPS [17]. Since the rise of the need for more accurate indoor accuracy in emerging and long-standing sectors (Health, Retail, Navigation), more methods were developed, and technologies have been improved to allow new methods to be incorporated, such as fingerprinting or trilateration [18]. Few techniques critiqued the lack of a third dimension with IPS. They justified that to find the position of a device or person in space accuracy could be improved by monitoring their location following three axes instead of two. A first approach focuses on three-dimensional triangulation and determines that the accuracy can be significantly improved, doing so as the devices are never on the same plane. Their proposed three-dimensional triangulation that uses four beacons defines crossing points using the Pythagorean theorem and spheres instead of their two-dimensional counterpart. Their method reduced the positioning error rate by 27.3% when compared to two-dimensional triangulation using the same hardware[19]. Another method further developed the three-dimensional approach by extending the number of beacons and managed to reduce the error margin of the mobile nodes further by taking the reflection and reverberation of the ceilings. Mitigating against this issue, a well-known problem for IPS, improved the accuracy and reduced the location error from 0.47 m to 0.38 m but justified that it is highly dependent on the choice of sensors [20]. Using a weighted centroid localisation (WCL), a first approach determined the position of devices using trilateration and RSSI. It presents a Kalman filter to reduce the noise of RSSI measurements and estimates the distance with a moving average filter. It works by associating weights to each of the beacons based on the distance to the beacon and degree and attenuates the fluctuations of RSSI by using the Kalman filter with a moving average filter [21].
Another method used a two-step approach, where offline training is performed first, followed by an online location. A piecewise fitting based on lognormal distribution is used to train the propagation model of the RSSI for each of the beacons to reduce the influence of abnormal RSSI over positioning accuracy. The Wi-Fi received signal strength (RSS) based positioning system is widely used because of the widespread deployment of Wi-Fi access points in the indoor environment[22] . A Gaussian filter was designed as the signal pre-processor, and its output is fed to a distance weighted trilateral relations theorem. Their experiment found a probability of location error of fewer than 1.5 metres at higher than 80% [23] . Other models instead focused on improving the mechanics of the existing methods. One of the approaches proposed a target tracking system with more substantial energy efficiency that its alternatives. It brings an improved virtual grid, capable of dividing area clusters and assign beacons to them, reducing redundancies and economising energy. It is also capable of performing a similar task of other methods while having its sensors nodes operating in an energy-saving model. Furthermore, the routing of information has been greatly optimised. The robustness and network lifetime have been improved while energy consumption has been reduced [24]. Many methods in the field use Kalman filter, either to remove the noise of the received RSSI or to predict the upcoming coordinates of a moving object. Its low consumption of processing power and high efficiency have made it a vital part of IPS applications.
Ultra-Wide Band (UWB) technology is another emerging technology for location tracking. The UWB technology uses spectrum greater than 500 MHz, allowing more accurate location tracking at longer range, which makes it suitable for use in large indoor spaces such as hospital, warehouses, or factories. In addition, UWB signals can pass through solid walls and floors, enable tracking obscured objects or people. Despite all its advantages, it is more expensive to implement and needs more complex infrastructure and hardware to support compared to BLE, making it less accessible for smaller businesses. In contrast, the BLE is more energy efficient, cheaper to employ but its accuracy and range is lower than UWB. BLE devices can be promptly and simply set up using a smartphone or other Bluetooth-enabled devices, and the technology is widely upheld by a wide range of consumer devices. The choice between the BLE and UWB is dependent on the application [25] . At the time of this research, UWB was still in its infancy stage, with a few studies demonstrating its capability over BLE-based localization systems. The significantly higher price and limited availability of UWB-based development kits and commercial solutions were the obstacle to replicating any results in the controlled environment where the BLE-based tests were conducted and made it a difficult baseline to compare to. From the availability and price perspective, UWB is yet to be widely available both in commercial products and in research facilities (developers, system integrators). To the authors' knowledge, the available UWB-based solutions are provided by less-known manufacturers, as industry leaders still favor BLE for localization due to its low price and their acceptable accuracy in many applications. BLE chips remain at a very sensible price point for the functionality provided, are energy efficient, have extensive support for integrators and developers from their manufacturers, and have wide availability that pushes for integration in many sectors. Their downside is their limited range and accuracy. In conclusion, UWB is indeed an interesting technology and has a bright future when it comes to indoor localization, but it will need some time to further develop and become widely available for being considered as a viable alternative to the existing methods and techniques. In this study, Wi-Fi was only used as a retrieval mechanism for the harvested data. An ethernet connection was also available, but it increases the complexity of the setup as it required wiring the beacons to an ethernet switch. As suggested in the conclusion, future considerations have been made to use the Thread protocol to improve the energy efficiency, communication speed, and robustness of the system. The application of UWB for indoor positioning can be the subject of another research. However, this research project was limited to the application of BLE and Wi-Fi.
One of many approaches trialled using combined trilateration and fingerprinting, alongside a Euclidean distance formula instead of using the more common radio propagation model to convert the RSSI into distance estimates. It proposed using fingerprinting as an off-line learning stage, where nearest neighbours (NN) of each beacon are calculated. The online stage saw trilateration used to determine the location of the devices using the Euclidian distance formula. The accuracy of the proposed system was further improved by using a Kalman Filter, with experimental results giving a location error rate reduced by 53.64% and 25.58% compared to lateration and fingerprint respectively [25].
Other methods combine both trilateration and fingerprinting. One approach relied on basic fingerprinting combined with a WCL, meaning that a smaller number of reference points is required for fingerprinting to be efficient; It reduces the time required to read RF signals and accelerates the learning process of the system. This method labels the reference points as lightly populated, and concurrently uses its WCL. Once the location has been estimated by each side individually, it reruns the WCL for the final location estimation. It performs with a similar localisation estimation error than elemental fingerprinting but requires 40% fewer reference points [26].
Another approach was performed, where the shortcomings of Fingerprinting and its time-consuming nature, were alleviated using trilateration. The approach used the results provided by a trilateration model, alongside an improved the radio propagation model that uses an average mean square error to minimise the hectic nature of the received RSSI, to feed a Fingerprinting model. Its results proved to strongly boost the accuracy of their base fingerprinting model once a gradient filter was added, by up to 45%, from 5.87 m to 2.67 average error [27]. A more recent approach using both Fingerprinting and trilateration proved more robust results, where many beacons were deployed over the area and were used to approximate the position of the device using Fingerprinting. Then, trilateration was used over a smaller area to refine the position of the devices, improving the accuracy of the model to 0.615 m positioning error while it was up to 1.162 when the base Fingerprinting model was used [28]. From the literature, Wi-Fi RTT (round-trip-time) may produce more accurate results and have less sensitivity to the environmental impact. However, this comes at higher price and complexity where the proposed RSSI positioning system is significantly less complex and cheaper. In addition, there are at least three beacons in each room where the proposed system needs direct line of sight to only two beacons to accurately position the object. The proposed positioning system’s application is tailored to a home environment and not industrial, where the user is able to place beacons which minimize effect of obstacles.
3. Method
For this study, a small-scale indoor positioning system was implemented. It collects the RSSI of BLE devices to estimate their positions using location nodes and processes the data locally on one of them. A graphical user interface (GUI) dashboard is also hosted for visualisation. The data is centralised in a MySQL database, and multi-lateration is performed on the collected data in real-time within the visualisation tool. A Kalman filter is used on two occasions; at first to equalise the RSSI that is known to be volatile between measurements, and then smooth the resulting x and y coordinates of the estimated position. Most RF technologies have a form of RSSI either in a communication packet or by measuring the strength of the received signal. It allows the devices to monitor the quality of the communication medium: They do so by measuring how much the power of the message sent has diminished over the distance. It is the basis around which the positioning model is built, using the rate at which power decreases over distance[29,30] With the popularisation of Bluetooth and its BLE counterpart in recent years, devices using the BLE protocol have been chosen as the tracked devices. It is a low energy communication protocol that can be used continuously and does not require a master/slave relationship between communication devices as it uses a mesh networking model. It also has a high enough range for indoor monitoring (25 m radius). In this research, the Bluetooth was used to gather the distance data: The beacons listen for packets from the emitting device and use the RSSI packet to compute the distance. Wi-Fi is used to connect the beacons to the processing unit: Each beacon has a static IP address on a private Wi-Fi network for ease of management and uses it to return the collected data to the processing unit's database. in conclusion, Bluetooth Low Energy (BLE) is used as a radial distance sensor, and Wi-Fi as the communication medium to return the sensor data. The various components that form the topology of the proposed network as shown in figure 2 are:
- Wearable devices, or Wearables: These devices, that can have a variety of form factors such as smartwatches, phones or even laptops, will be transmitting a signal strength marker embedded in a BLE packet that will be used to determine their position.
- The locations nodes are devices with a known fixed physical location and scan for nearby BLE devices. They can be either battery or mains powered for flexibility. There is a requirement for the number of devices to be deployed depending on the wanted accuracy, as the more there are location nodes, the more accurate the system becomes. Due to their fixed position, they are named beacons.
- The gateways are transmitting the collected data back to the processing unit. If the number of location nodes is small (under 10), the gateway can also act as the processing unit. The gateways may also need to be multi-protocol devices, as they will need all the available bandwidth and need for communication to cloud services.
- The processing unit translates the harvested RSSI of the BLE devices from multiple location nodes into physical coordinates. There are various methods available to estimate the beacons’ position (i.e. trilateration, fingerprinting). The processing unit can either be a local server or computer, or a cloud instance if the gateway is granted internet access.
In the proposed solution, the term “Beacon” which is generally attributed to a broadcasting device is given to the scanning location nodes instead as the wearables are mobile devices, even though the location nodes are not the broadcasting element. It behaves differently than commercial solutions where feedback is given directly to its wearer (i.e. a mobile phone). In this proposed system, the system determines the position of the device as the end-user would ultimately be a dashboard operator instead of the device’s wearer. It is using an inverse feedback loop when compared to the one used by commercial solutions. Moreover, the system is designed to be dynamic, and funnel the harvested data in a convergent manner to the processing unit, rather than having each device run analytics at the edge. The topology of the network will define the type of connectivity between the devices, as multiple protocols are found in the proposed solution.
The location nodes are required to have access to at least two communication protocols, as while they are scanning for nearby BLE devices, they would be unable to send the collected data via Bluetooth due to the bandwidth limitation. Various devices display two or more antennae, allowing for double the bandwidth on a single protocol; However, their price and form factor are considerably higher. BLE has been chosen for location tracking, but many higher range wireless protocols can be found. For instance, cellular network or long-distance RF can communicate over dozens of kilometres. However, their application in the proposed solution is not practical due to their price point, power needs and size of the required antennae. Their limitations led to the selection of Wi-Fi as the communication network as it requires less configuration than most network types. The devices only require connecting to the same network as the processing unit, which is given a fixed IP address, and the location nodes can connect directly to the database and input their latest readings. The wide availability of Wi-Fi is also a factor in this approach, as it means that the supporting network for the system could easily be replicated.
Multi-lateration is used to generate the devices’ coordinates. It relies on the estimated RSSI of location nodes from the received broadcasting of nearby wearables. Each node uploads its reading in a MySQL database hosted on the gateway, that then estimates the
Figure 3.
Flowchart for (a) the Hexiwear sensor data collection program and (b) its subprocess.
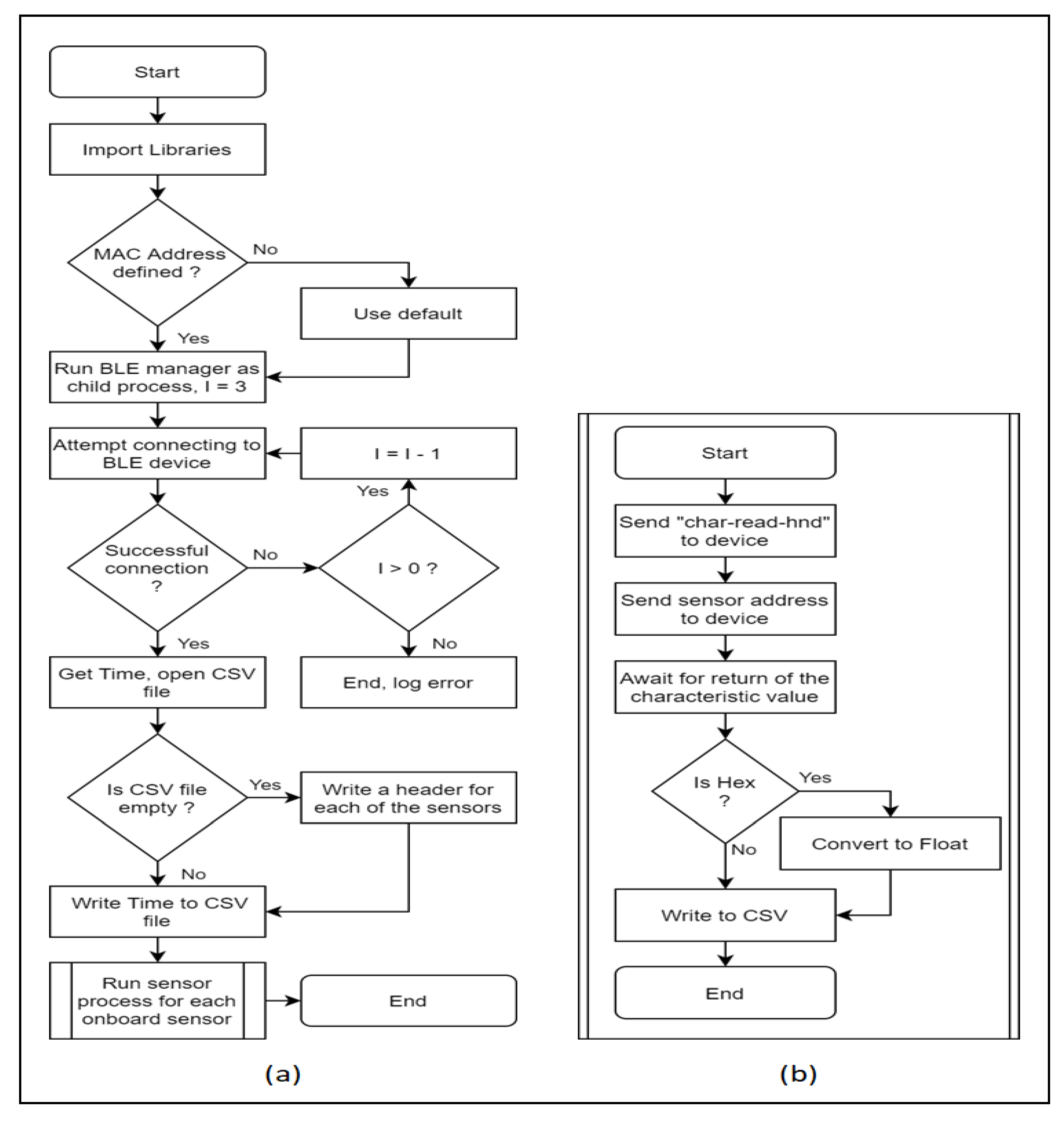
position of the wearables as depicted in figure 3. A Kalman filter is used to smooth the received RSSI as its value fluctuates wildly, especially in crowded or obstructed environments.
An unscented Kalman filter is used to smooth the RSSI measurements, such that as the target moves and time goes on, the variations in the signal strength grow stronger. The cause seems to be the presence of many devices present in the test environment. It is either due to reverberations of signal or limits of the scanning device in processing power. It is corrected by using a two-dimension Kalman filter, with both the RSSI as well as using the resulting distance calculated with the previous measurements. A rolling buffer of ten readings is used where the newest reading will push the oldest one out, ensuring that the filter does not keep far apart values weighing in on new values. However, the filter needs ten readings before being operated at its most efficient, meaning that the first readings can be sparse and far apart. The filter was first implemented from its base equation, working as demonstrated by the block diagram seen in figure 4 and figure 5 respectively.
Figure 4.
Flowchart of (a) the scanning program and (b) the scanning and processing subprocess.
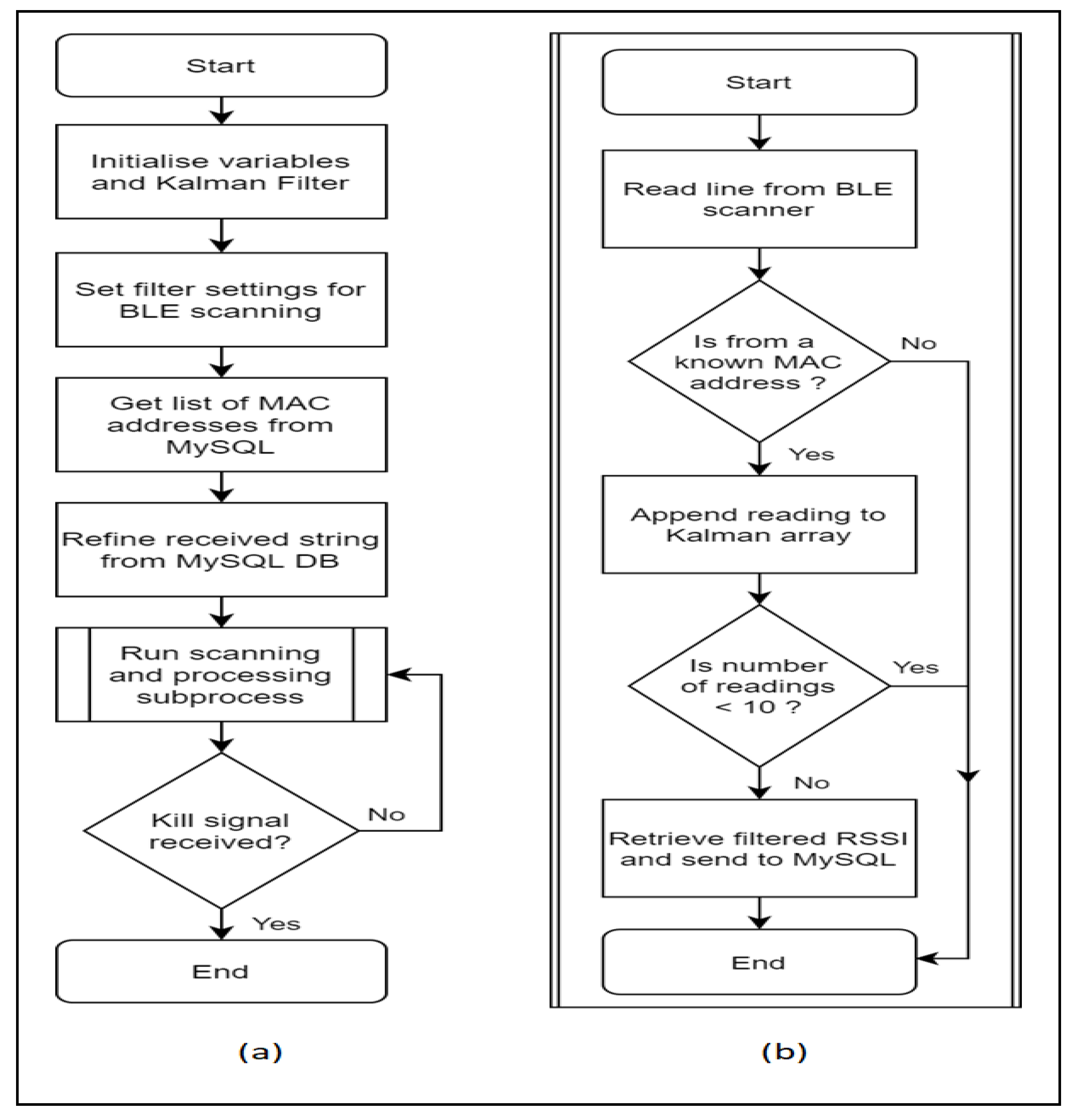
Figure 5.
Block diagram of the Kalman Filter mechanism.
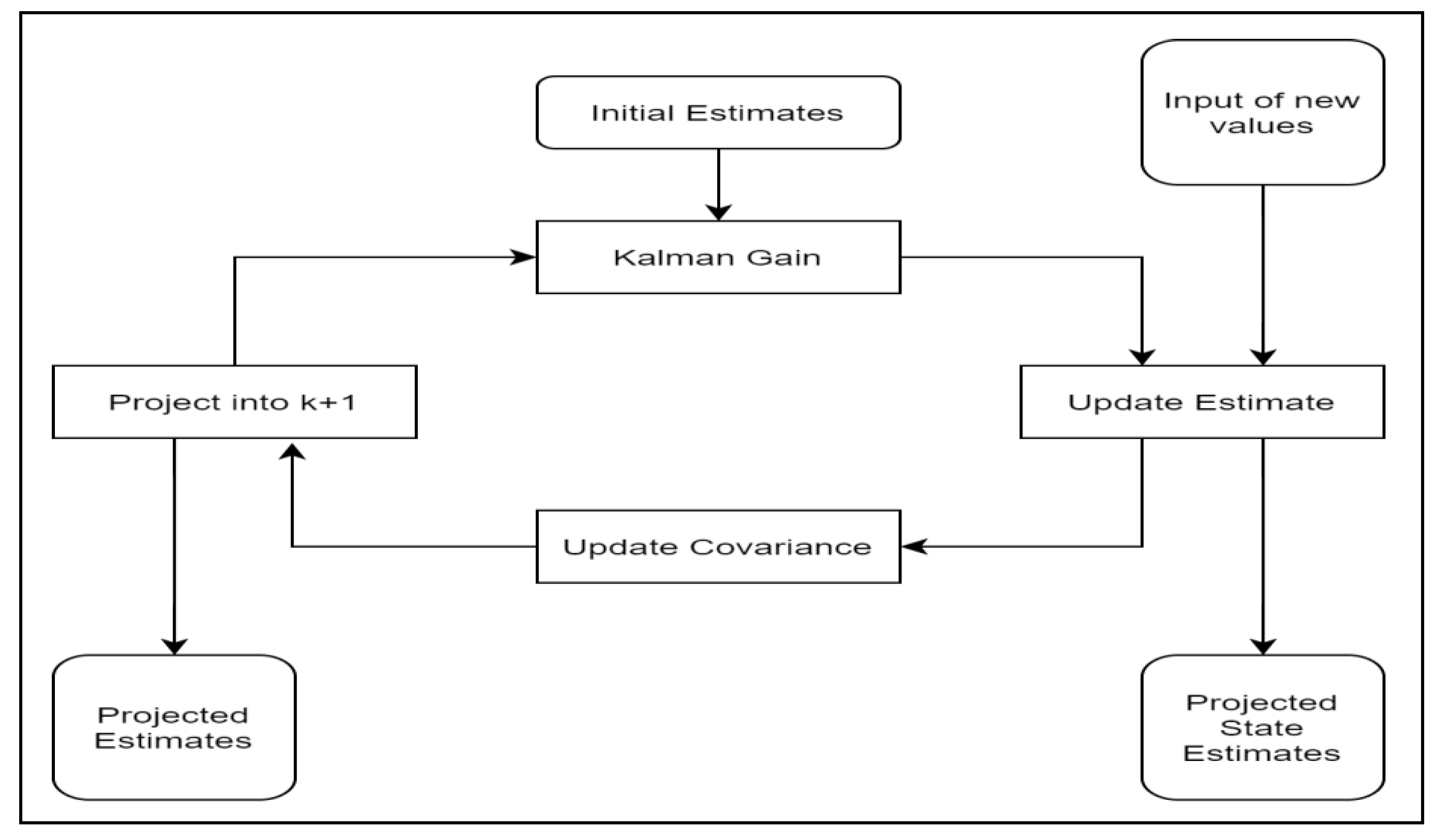
For the Kalman Filter Recursive Algorithm to be operational, four formulas are required. They represent the equations of the Kalman Gain, the estimation update, the covariance update, and the projection for the next iteration.
The gain of the Kalman filter is calculated using the formula in Equation 1.
For an iteration , and where is the previous estimate of , and is the error covariance matrix at time (nxn), represented in Equation 2.
Equation 1: Error covariance matrix of the Kalman Filter at a given time k
represents the noiseless connection between the state vector and the measurement vector and is assumed stationary over time (mxn). Equation 3 and 4 shows the covariance of the two noise models.
Equation 5 presents the equation used to update the estimate at an instance .
If the previous estimate of is called , and where is the Kalman gain and the innovation or measurement residual known as has its formula given in the measurement residual equation.
The error in the prior measurement is given by .
The equation to update the covariance of the system has its formula shown in the covariance update equation.
where; is the Identity of , is the Kalman gain, represents the noiseless connection between the state vector and the measurement vector and is the previous estimate of .
When projecting into the state at , are shown in Equation 8, the equations to determine the outcome and estimate at the next iteration.
Equation 8: Estimated outcome and Error covariance matrix at
where; is the state transition matrix from the state at iteration to the state at and , and have been described above [28].
A Graphical user interface (GUI) which is based on the LAMP stack, was used in the visualization of the movements.
4. Results
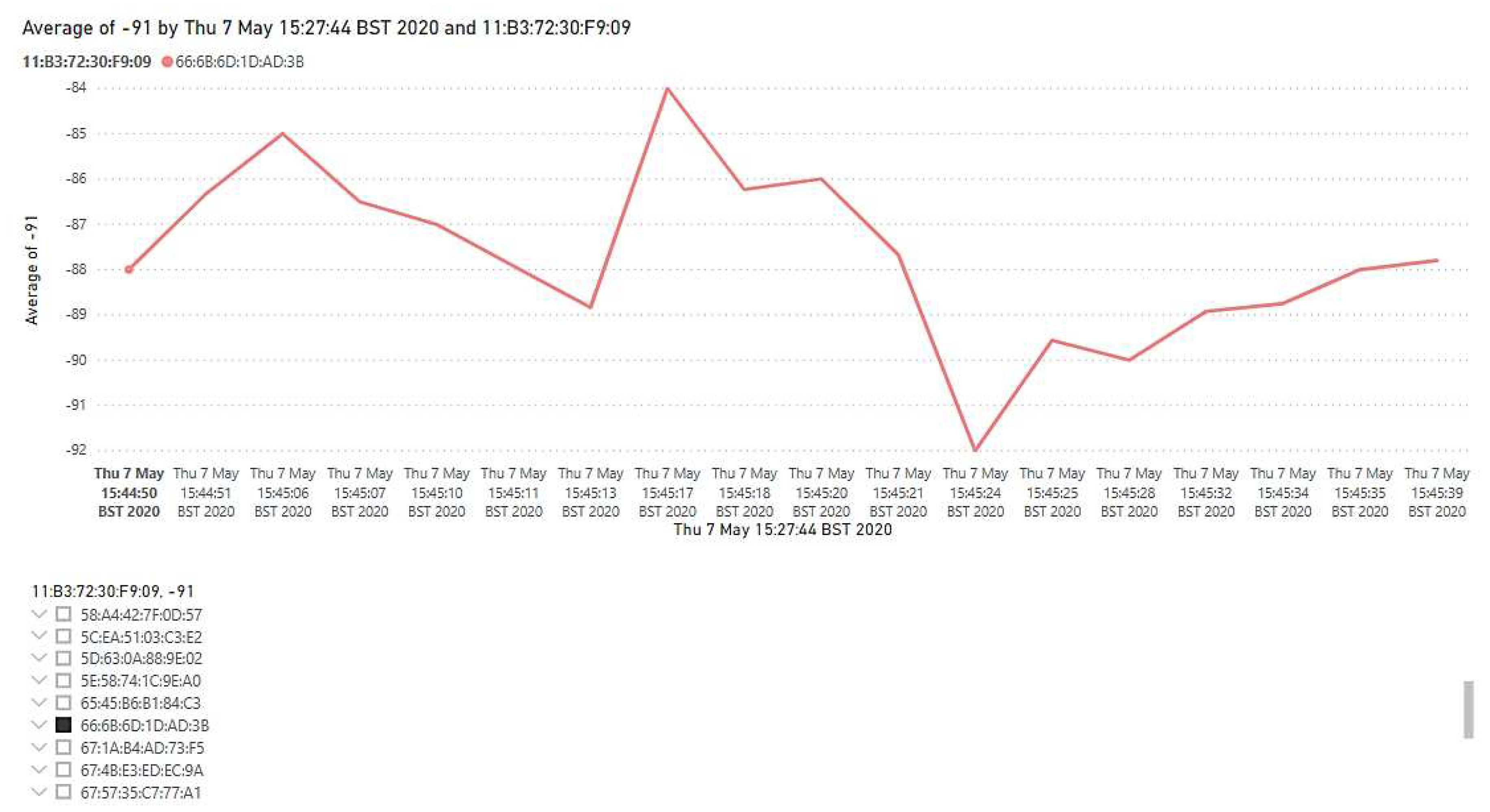
The received RSSI can be exported to a csv file and analysed further. As there are a lot of BLE devices in the testing environment, the graph in Figure 6 demonstrates that not all devices transmit packets at the same time nor at the same frequency. Errors in the data packet or its transmission may happen periodically, creating blank spots with no data. In addition to increase the credibility of the results, the measurements were conducted over two months three times every day. For each measurement include 100 measurements and denoising methods were used to exclude outliers.
Moreover, once analysing the data from a single device, the received RSSI is highly variable. Not only do some devices not transmit packets frequently enough to provide near real-time information (> 5 s), they also have a lesser standard of transmission, meaning that the transmitted power varies significantly from one packet to another. As shown in fig 7, the device will try to self-correct the power received by adjusting its transmitting power, rendering it unfit for the proposed solution.
However, using Hexiwear wearable devices with a fine-tuned transmitting power alongside Kalman filter smoothing, the experiment proved that the RSSI is a usable and robust indicator for distance measurement. An experiment using three wearable devices and a commercially available BLE smartwatch was conducted, where the devices are taken 1m further away while walking in a straight line from a location node (starting at 1m away, until 5m away) while keeping the line of sight clear. The product was targeted to be used at care houses and the test environment mimics the target application.
Figure 8.
Graph of the received RSSI from Hexiwear wearable device 1.
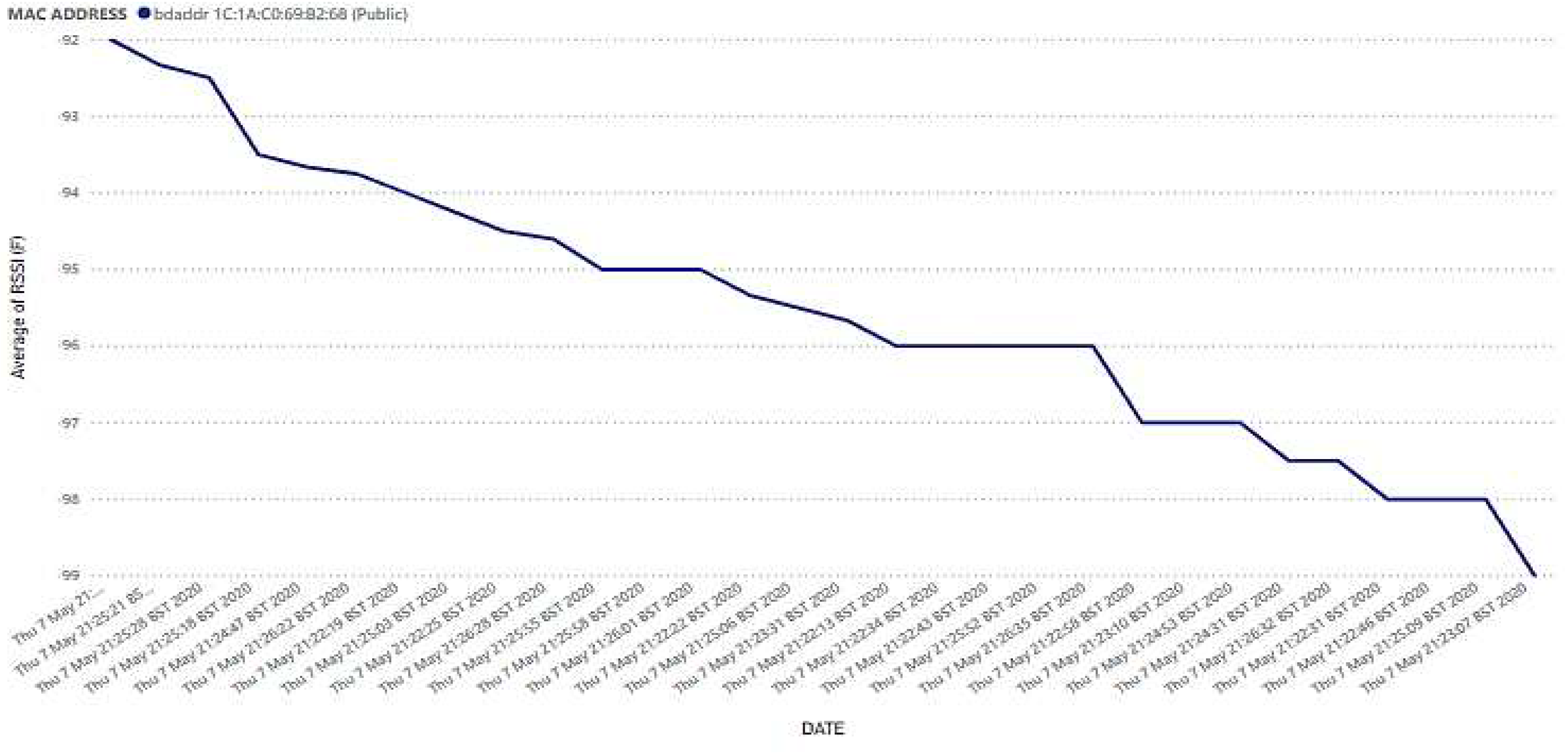
Figure 9.
Graph of the received RSSI from Hexiwear wearable device 2.
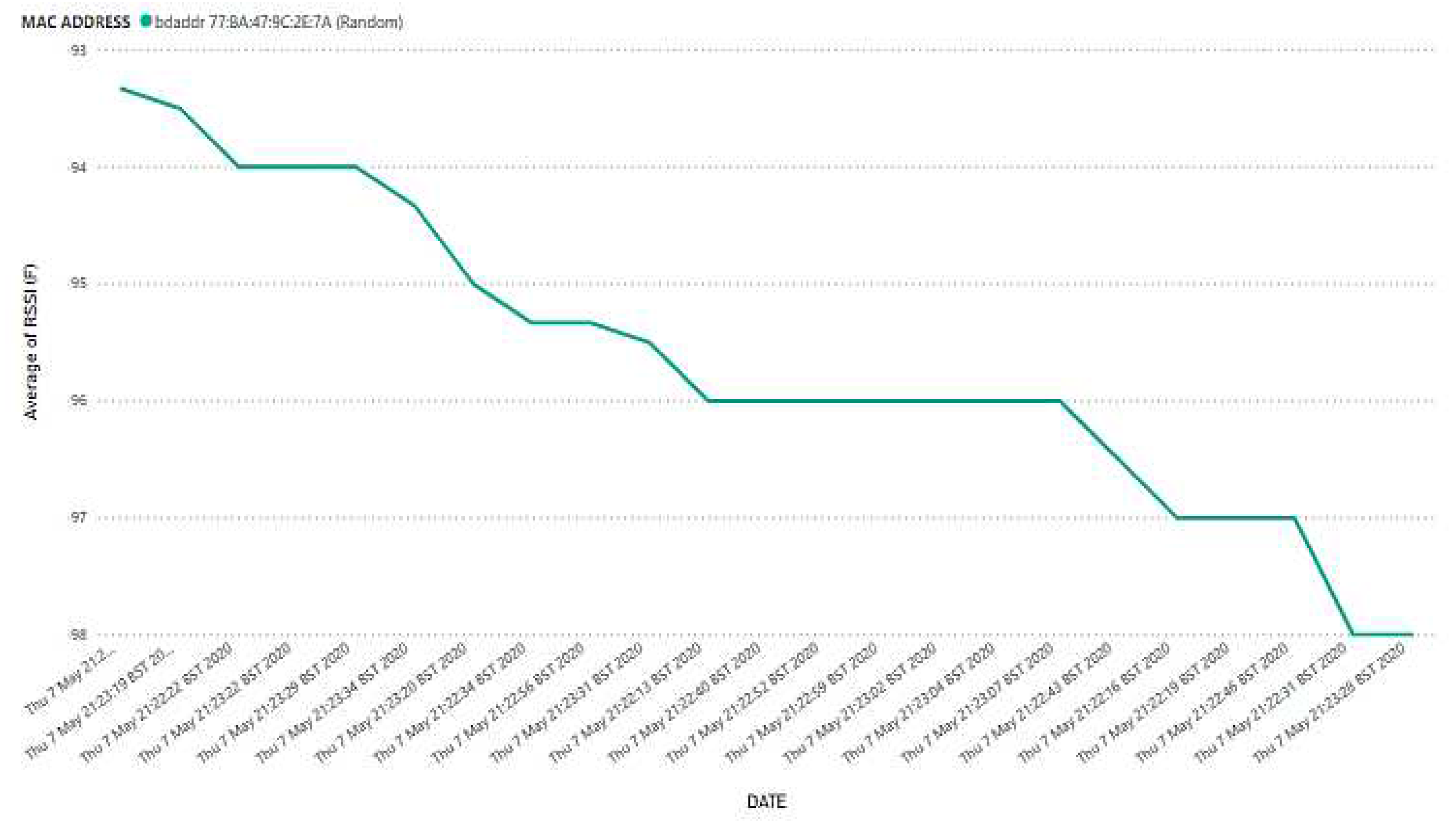
Figure 10.
Graph of the received RSSI from Hexiwear wearable device 3.
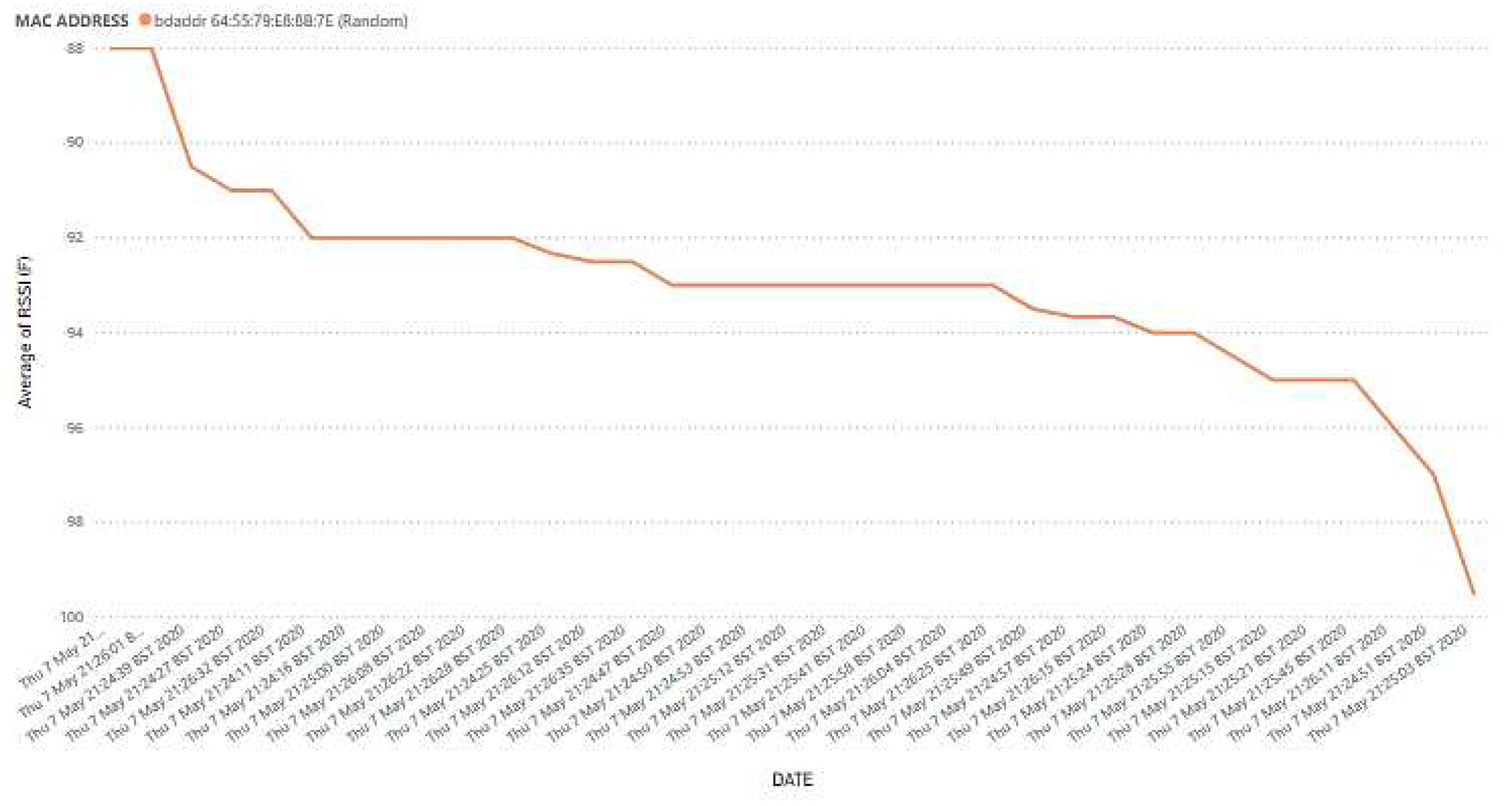
The commercial device showed an unpredictable RSSI (fig 7). In contrast, the Hexiwear wearable devices showed an apparent decrease in RSSI with short plateaux at each of the 1 m stops (fig 8, fig 9 and fig 10). The overall experiment demonstrated the viability of the proposed solution and straightforward usability for location objects indoors. fig 11 and 12 depict the GUI demonstration of the movements tracked in the study.
Figure 11.
Screenshot of single room visualization at its initial point.
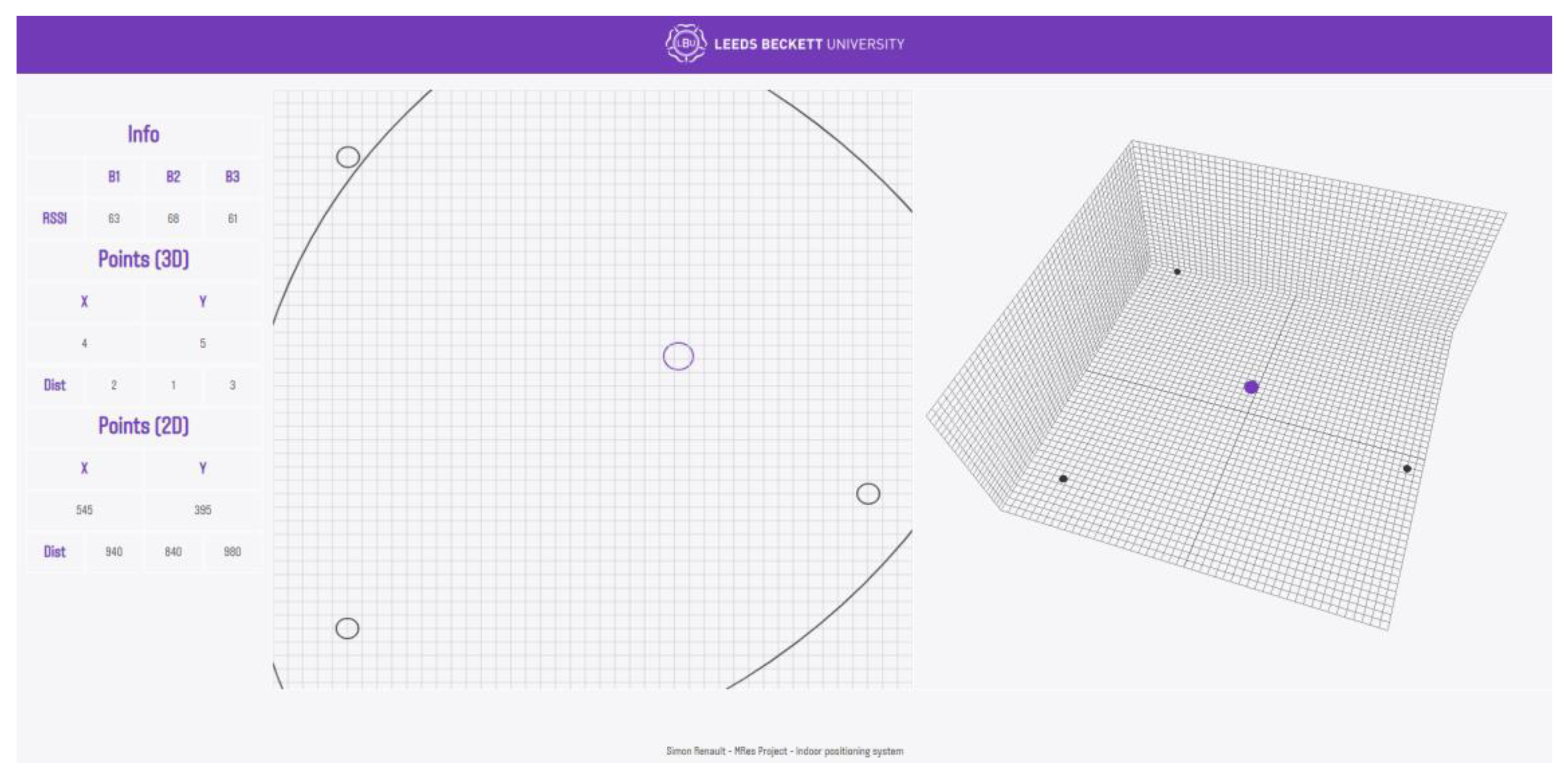
Figure 12.
Screenshot of the single room visualisation after movement 1.
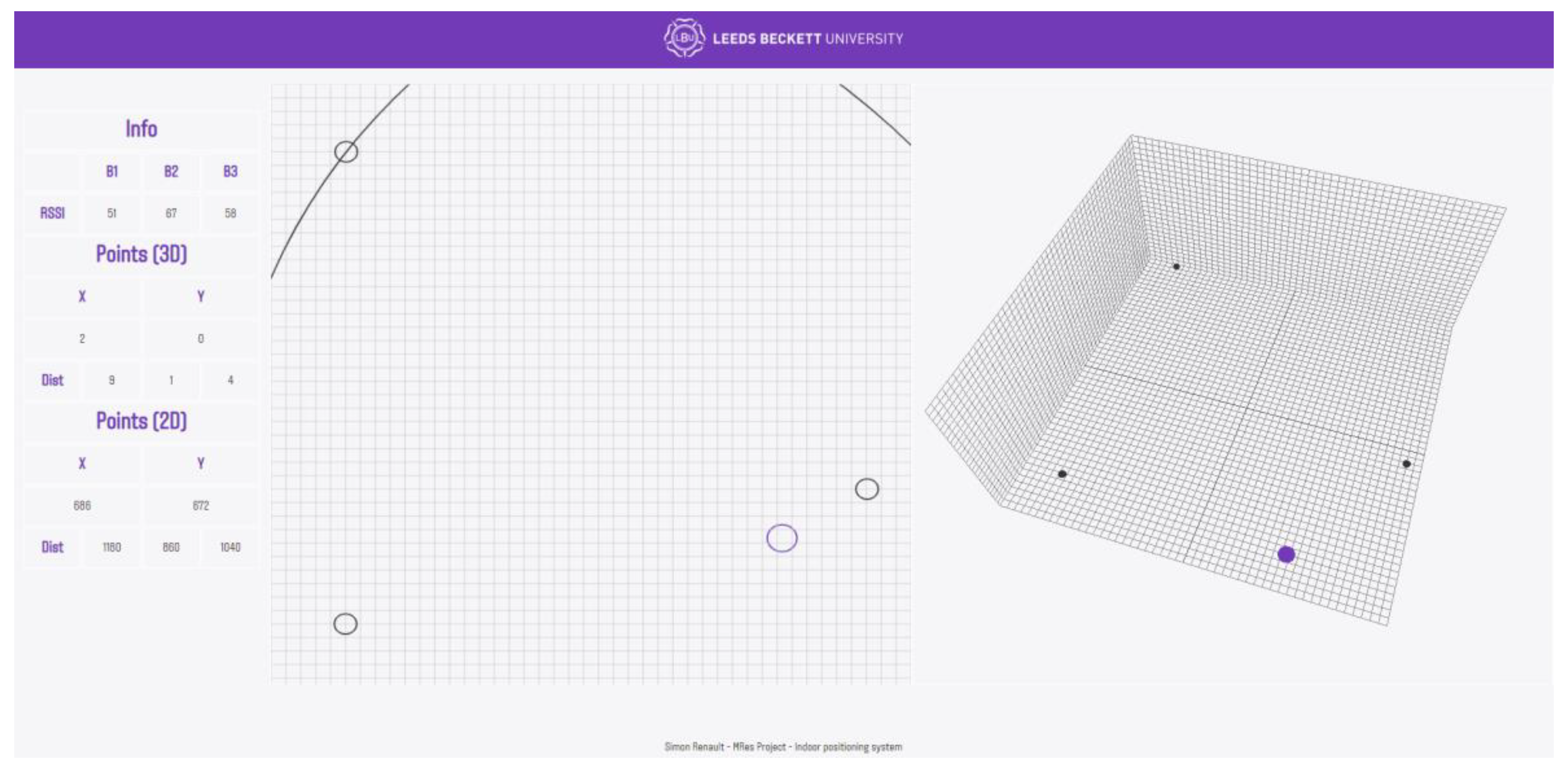
Figure 13.
Screenshot of the single room visualization tool with one device after movement 2.
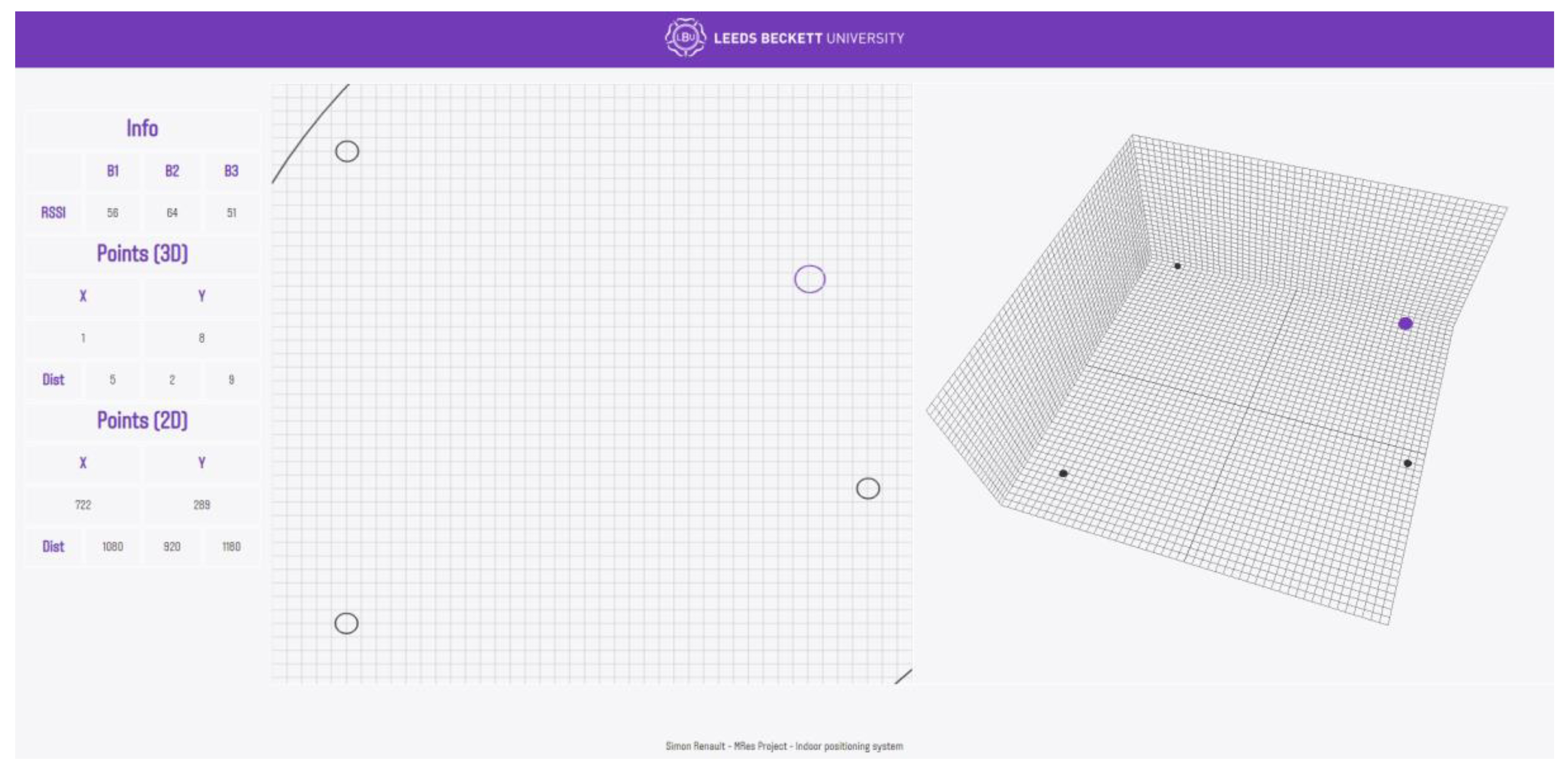
Figure 14.
Screenshot of the single room visualisation tool with one device after Movement 3.

It is worth mentioning that at the point of release of the product, the cost of the product was significantly low compared to other existing products, where a beacon is costing approx. £40 (compared at the time with £300+ for the cheapest variant on the market per beacon). Total system cost was approximately £300, while existing tech at the time of study was £1.5k. This is comparing with commercial solutions though, not with similar studies. Complexity is low in terms of install, but robustness is not great, however the complexity of the proposed system is significantly lower than others.
5. Conclusion
The developed system uses BLE and Wi-Fi and performs Trilateration on BLE to determine the location of the BLE wearable devices. The performance of the proposed system was demonstrated using a GUI. Experimental results on live data showed that the proposed system generates acceptable accuracy performance of within 70 cm with three beacons in a normal room size (3 by 5 meters) and with 6 beacons in large rooms. In a communal area like an amphitheatre the accuracy could reduce to 1.8 meters. Despite the reasonable performance of the system, the proposed system was suffering from its limited battery life of its BLE scanning nodes and robustness of its accuracy in Realtime. As the proposed system performs trilateration and Kalman filtering on each node. The performance of most of the indoor positioning systems are usually compared with that of GPS, the most widespread and applied positioning system. Due to GPS’s lack of capacity to be used for tracking objects and human indoors, existing indoor positioning methods all aim at achieving an accuracy very close to GPS, enabling them to be combined with the GPS and work alongside of each other. Many wireless protocols have thus been used to determine the position of objects indoors, but upon review of their capabilities and due to the specifications of IPS, small-sized, low powered devices are preferred over long-range solutions. The proposed systems will employ the IEEE 802.15 range of wireless protocols, due to their numerous advantages, e.g. acceptable range, low power consumption and large bandwidth to perform object/human positioning.
Wearable technologies were studied and proved to be the most convenient choice of devices as they fit the specifications of the proposed solution. They could fulfil the low-power and low-cost requirements of indoor positioning systems, while offering privacy and non-intrusive approach. Moreover, many commercial/industrial wearables devices support the chosen wireless protocols as their standard communication medium. They also often have onboard sensors that can be used for object and human activity analysis.
Communications are evolving at a fast pace in today’s world. While at the inception of the study, technologies such as: Ultra-Wide Band (UWB), were still at their early stages of their developments. This technology has been designed for indoor wireless communications and facilitating locating objects in indoor spaces using arrays of antennae in a combination of angle of arrival (AoA) and angle of departure (AoD) (the full extent of this technology’s specification and capabilities have not yet known, and its applications in commercial sector have yet to be tested too.). In addition, new BLE and Bluetooth version 5.1 with AoA and AoD capability has recently been released. These recent advancements enable multi-angulation at lower cost, while it could deliver higher performances. Hence, application of these two technologies along with the use of multi-angulation could result in a more accurate positioning system at lower cost. While the proposed system in this study achieved acceptable accuracy, it was not expandable due to its required computational power. Its required data transmission time is increasing over time, indicating a hold-up of information due to the time required to process a single measurement, which is partly due to the Kalman filtering employed which requires 10 RSSI measurements to reach its target accuracy. Future direction would explore the impact of adopting round trip time (RTT) ranging technology in a no-line-of-sight configuration for the same implementation. Also, the use of thread communication could also provide better performance in terms of accuracy and the processing requirement. While efforts could also be made towards reducing the complexity and size of the model for better implementation
Author Contributions
The following statements should be used “Conceptualization, S.R. and A.S.; methodology, S.R.; software, S.R.; validation, S.R., A.S. and E.O.; formal analysis, S.R.; investigation, S.R. and A.S.; resources, A.S.; data curation, S.R.; writing—original draft preparation, S.R., A.S., and E.O.; writing—review and editing, S.R., A.S. and E.O.; visualization, S.R. and E.O.; supervision, A.S.; project administration, A.S.; funding acquisition, A.S.
Funding
This research has been funded under a knowledge transfer partnership by Innovate UK (KTP 10304).
Acknowledgments
The Authors wish to acknowledge the school of built environment, computing and engineering, Leeds Beckett University, Leeds, UK for providing access to laboratories and physical space for engagement throughout this study.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chuang, F.C.; Wang, J.S.; Yang, Y.T.; Kao, T.P. A Wearable Activity Sensor System and Its Physical Activity Classification Scheme. In Proceedings of the in proceedings of the international joint conference on neural networks; 2012.
- Mist - Juniper Networks, I. RTLS and Workflow Automation.
- N. Semiconductor Infocenter: Thread SDK v.010 Multiprotocol Support.
- Raspberry Pi Foundation Raspbian Downloads.
- Shojaeizadeh, M.; Djamasbi, S.; Trapp, A.C. Universal Access in Human-Computer Interaction. Methods, Techniques, and Best Practices. In Proceedings of the in 18th International Conference, HCI International, Toronto; 2016.
- Altun, K.; Barshan, B.; Tuncel, O. Comparative Study on Classifying Human Activities with Miniature Inertial and Magnetic Sensors. Pattern Recognit 2010, 43, 3605–3620.
- Dionisi, A.; Marioli, D.; Sardini, E.; Serpelloni, M. Autonomous Wearable System for Vital Signs Measurement With Energy-Harvesting Module. IEEE Trans Instrum Meas 2016, 65, 1423–1434.
- Liu, Z.; Liu, B.; Chen, C.W. Joint Power-Rate-Slot Resource Allocation in Energy Harvesting-Powered Wireless Body Area Networks. IEEE Transactions on Vehicular Technology 2018, 67, 12152–12164.
- Citroni, R.; Di paolo, F.; Livreri, P. Evaluation of an Optical Energy Harvester for SHM Applications. AEU- international journal of electronics and communications 2019, 111.
- Bencak, P.; Hercog, D.; Lerher, T. Indoor Positioning System Based on Bluetooth Low Energy Technology and a Nature-Inspired Optimization Algorithm. Electronics (Basel) 2022, 11. [CrossRef]
- Hayward, S.J.; van Lopik, K.; Hinde, C.; West, A.A. A Survey of Indoor Location Technologies, Techniques and Applications in Industry. Internet of Things 2022, 20, 100608. [CrossRef]
- Qureshi, M.; Umair, M.; Umair, Z.; Petrus, H.G. Evaluating the Implications of Varying Bluetooth Low Energy (BLE) Transmission Power. Sensors 2019, 1.
- Abinayaa, V.; Jayan, A. Case Study on Comparison of Wireless Technologies in Industrial Applications. International Journal of Scientific and Research Publications 2014, 4.
- Obeidat, H.; Shuaieb, W.; Obeidat, O.; Abd-Alhameed, R. A Review of Indoor Localization Techniques and Wireless Technologies. Wirel Pers Commun 2021, 119, 289–327. [CrossRef]
- Sesyuk, A.; Ioannou, S.; Raspopoulos, M. A Survey of 3D Indoor Localization Systems and Technologies. Sensors 2022, 22. [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Transactions on Systems, Man, and Cybernetics, Part C (Applications and Reviews) 2007, 1067–1080.
- Park, H.; Noh, J.; Cho, S. Three-Dimensional Positioning System Using Bluetooth Low-Energy Beacons. Int J Distrib Sens Netw 2016, 12.
- Lee, H.C.; Lee, D.M. The 3-Dimensional Localization System Based on Beacon Expansion and Coordinate-Space Disassembly. The Journal of Korea Information and Communications Society 2013, 38B, 80–86.
- Subedi, S.; Kwon, G.R.; Seokjoo, S.; Suk-seung, H.; Jae-Young, P. Beacon Based Indoor Positioning System Using Weighted Centroid Localization Approach. In Proceedings of the ," in 2016 Eighth International Conference on Ubiquitous and Future Networks (ICUFN); 2016.
- Guangyi, G.; Ruizhi, C.; Feng, Y.; Zuoya, L.; Shihao, X.; Lixiong, H.; Zheng, L.; Long, Q. A Robust Integration Platform of Wi-Fi RTT, RSS Signal, and MEMs-IMU for Locating Commercial Smart Phones Indoors. IEEE Internet Things J 2022, 9, 16322–16331.
- Jianyong, Z.; Haiyong, L.; Zili, C.; Zhaohui, L. RSSI Based Bluetooth Low Energy Indoor Positioning. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN); 2014.
- Zhang, M.; Gong, C.; Feng, Y.; Lu, Y. An Novel Energy-Efficient Dynamic Target Tracking Protocol for Wireless Sensor Networks. In Proceedings of the in Proceedings - International Conference on Networks Security, Wireless Communications and Trusted Computing, NSWCTC 2009; 2009.
- Subhan, F.; Hasbullah, H.; Ashraf, K. Kalman Filter-Based Hybrid Indoor Position Estimation. International Journal of Navigation and Observation 2013.
- Subedi, S.; Pyun, Y. Practical Fingerprinting Localization for Indoor Positioning System by Using Beacons; 2017;
- Accent Systems, "UWB vs BLE Beacons for indoor location," https://accent-systems.com/uwb-vs-ble-beacons-for-indoor location/#:~:text=UWB%20can%20transmit%20signals%20over,tracking%20within%20a%20smaller%20range., 2023.
- Subhan, F.; Hasbullah, H.; Rozyyev, A.; Bakhsh, S.T. Indoor Positioning in Bluetooth Networks Using Fingerprinting and Lateration Approach. In Proceedings of the ," in 2011 International Conference on Information Science and Applications; 2011.
- Ishihara, M.; Kawashima, R. A Fingerprinting Trilateration Method FTM for Indoor Positioning and Its Performance,. in Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), 2019.
- Ruminski, J.; Kaczmarek, M.; Buinowski, A. Accuracy Analysis of the RSSI BLE SensorTag Signal for Indoor Localization Purposes. In Proceedings of the in 2016 Federated Conference on Computer Science and Information Systems (FedCSIS), Gdansk; 2016.
- Tony, L.; Neil, T. Tutorial: The Kalman Filter. Tina Memo, Manchester, Medical School, University of Manchester 1998, 2–10.
Figure 1.
Example Map of an Implementation of a Location System.
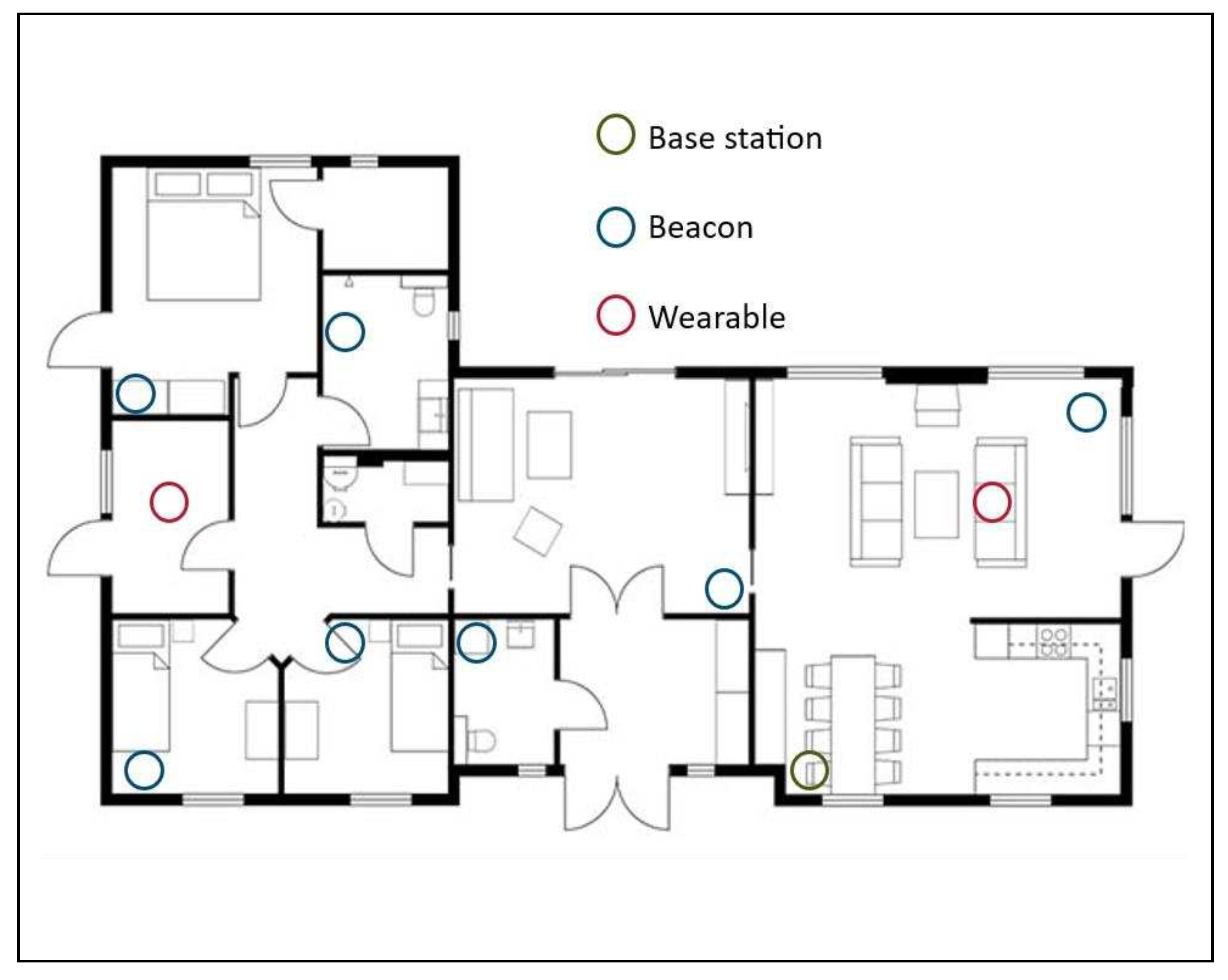
Figure 2.
Schematic of the topology for the System.
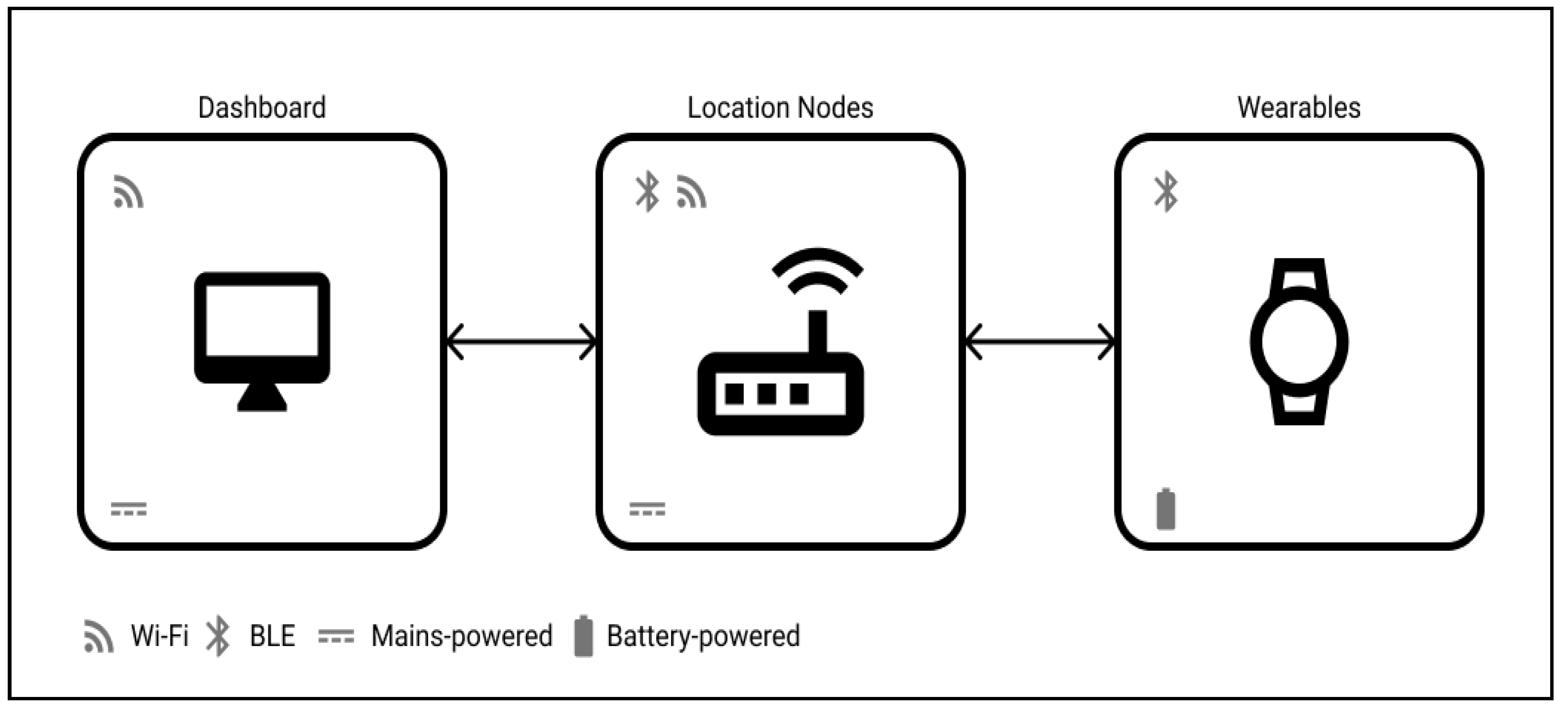
Figure 6.
Graph of all the incoming RSSI from device present in the testing environment.

Figure 7.
Graph of the received RSSI from a commercially available BLE smartwatch.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



