
Submitted:
28 April 2023
Posted:
08 May 2023
You are already at the latest version
Abstract
Children with Autism Spectrum Disorder have deficits in social interaction and expressing and understanding emotions. Many robots for children with ASD have been proposed. However, few studies were found about how to design a social robot for children with ASD. Studies reviewed employed non-experimental studies to evaluate a social robot, but the methodology to design a social robot is rare. This study proposes a design path for a social robot for emotional communi-cation for children with ASD, following User-Centered Design approach. This design path is ap-plied with a study case, evaluated with an expert group on psychologist, human-robot interaction, human-computer interaction, and parents of children with ASD. Results show than following the design path proposed to design a social robot to communication emotions for children ASD is favorable.
Keywords:
Human-Robot Interaction
; Autism Spectrum Disorder
; User-Centered Design
1. Introduction
Autism Spectrum Disorder (ASD) is considered by both the World Health Organization (WHO) and the Diagnostic and Statistical Manual of Mental Disorders (DSM-5) as a condition characterized by deficits in two domains: (1) social communication and social interaction and (2) restricted repetitive patterns of behavior, interest, and activities. ASD is considered by a wide variety of clinical and behavioral expressions, resulting from multifactorial dysfunctions in the development of the central nervous system [1]. In Latin America, ASD diagnoses have increased. In Chile, ASD’s clinical practice guide for detection and diagnosis, published in 2011 by the Ministry of Health, estimates the prevalence in 2007 at 89.6 cases per 10,000 newborns. Therefore, developed countries present two new cases yearly for every 500-700 newborns [2]. In turn, most research into autism spectrum disorder has been conducted in affluent English-speaking countries [3]. Therefore, there is a notable increase and a deficit in the use of technology that can support therapies, mainly focused on emotional communication. In addition, the recognition of autism in girls is a challenge must, and most diagnostic tools have been developed primarily based on the observation of boys’ behaviors [4]. Therefore, these results are ignored cases of autistic girls who simple do not show behavior associated with observed in boys. Without the diagnosis of these girls, the proportion of boys with autism may be increases.
Social-Assistive Robots (SARs) have been of interest in healthcare and therapy, especially for children with ASD, where they have been found to improve their collective attention capacity by interacting with robots for communication, interacting, recognizing emotions, and developing social competence, among others [5]. Children with ASD typically do not see a robot as a mechatronic mechanism running using a computer program. Instead, they attribute characteristics expected to be attributed to living systems [6], and studies have found that children with ASD respond positively to robots [7]. Therefore, interaction with robots can be a better alternative for children with ASD to learn to perceive, understand and express emotions rather than traditional therapy.
Many robots have been proposed, such as NAO [8], KASPAR [9], Moxie [10], QTrobot [11], and AIBO [12]. However, few studies were found about how to design a social robot for children with ASD. Studies reviewed employed non-experimental studies to evaluate a social robot, but the methodology to design a social robot is rare. A study by Kunold et al. [13] proposed a framework to study and design communication with social robots based on Laswell’s 5Ws of mass communication: Who says what, in which channel, to whom, and with what effect. Authors extend this model to communication in Human-Robot Interaction. In another study, Su and Shuzhi [14] proposed a methodology for designing appearance and interaction ways on social robots. The authors considered three core variables of social attributes such as
- The situation includes some questions such as the native language, cognition of the robot, culture, scenes.
- Objects include who, how, and goal; and
- The role includes gender, bio-sociological, social differentiation, and cultural situation roles.
Bartneck and Forlizzi [15] proposed a design-centered framework for social human-robot interaction. The framework contains the following properties: form, modality, social norms, autonomy, and interactivity. In 2021 Axelsson et al. [16] proposed a framework to design social robots based on the participatory design, where authors proposed a set of canvas tool for participatory design, which is composed of the three phases of the design process: (1) definition of the problem space, (2) creation of the design guidelines, and (3) integration of them in the solution space. A case study [17] applied the participatory design in the design of a social robot for autism, where authors proposed a set of stages such as, (1) sensitization, (2) Focus group with stakeholders, (3) Generative intervention with children, (4) Validation and ratification of the preliminary findings, (5) Perceptual maps and conceptual design, (6) Preliminary 2D/3D prototyping with community feedback, (7) Detailed design and manufacturing, (8) Results.
A study proposed guidelines for designing social robots as second language tutors [18], such as (1) age differences; (2) target word selection; (3) the use of a meaningful context and interactions to actively involve the children; and (4) the dosage of the intervention. Bradwell et al. [19] provided design recommendations for social robots in health and social care. Therefore, the studies reviewed indicate a lack of design tools, guidelines, and methodologies to facilitate the design of a social robot for emotional communication, especially for children with ASD. Therefore, the research question is the following: How design a social robot for emotional communication for children with ASD?
2. Background
2.1. Communication Strategies with ASD
Some activities found as a communication strategy in children with ASD are (1) Imitation, which plays a significant role in the transfer of knowledge to the child from an external source, where the child learns new physical and verbal skills and explores his or her social [20] (2) Eye contact: it has been shown that eye gaze can be more useful than verbal communication. In addition, eye contact serves not only to monitor each other’s state of attention and emotion but also to establish mutual acknowledgment; (3) Joint attention: the act of sharing attentional focus is called joint attention [21], which is two individuals looking at the same target through eye gaze or pointing by means of hand gestures; (4) Turn-taking: a child with autism finds it extremely difficult to share things and indulge in normal conversations involving taking turns with others [22]; (5) Emotion recognition and expression: children with ASD find it very hard to read and interpret facial expressions and body language. Interactions with others can involve excessive sensory stimulation, causing severe distress to the child with autism [23]; (6) Self-initiated interactions: related to difficulties in asking for things they need.
2.2. Social Robots for ASD
A social robot is a robotic platform which it integrates a computational model able to communicate and interact with us, understand, and even relate to us, in personal way [20]. However, design a social robot for ASD is a challenge, especially if the interaction is between child-robot, because there are limitations such as perceptual, motor, and cognitive abilities compared with an adult. The first social robot with emotional abilities was Kismet [24]. Kismet has been designed with mechanism to help it cope with a complex social environment, more to communicate emotional expressions using the face. This social robot can express emotional states such as happiness, sadness, surprise, anger, calm, displeasure, fear, interest, and boredom. The expression of emotions can be through the face, voice, and movements.
The first robot conceived for therapy for children with ASD was from the AURORA project [25]. Later, Robota [26] was created, a doll with 5 Degrees of Freedom (DoFs), which could move its head, arms, and legs. This robot reacted to touch and used voice synthesizers attracting the attention of the child with ASD. Then a robot with a humanoid appearance and 29 DoFs appeared, named Infanoid [27]. It had cameras in both eyes of the robot for real-time detection and the eyes could perform saccades and smooth tracking of a visual target, while movement in its eyes, lips and eyebrows allowed it to express different emotional states. Infanoid also had microphones located in each of its ears, which allowed it to capture and analyze sounds.
In 2005 was developed Kaspar with a more human and childlike appearance, was then used for therapeutic purposes for children with ASD [28]. Kaspar was designed with 16 DoFs and measured approximately 46 cm tall. The behavior of the robot was controlled remotely by a human operator. It contained cameras for detecting objects. This first version of Kaspar contained servomotors located in the face to make facial expressions. As such, it had three DoF in each eye/eyelid, two in the mouth, three in the neck, five in each arm and one DoF on the torso. Another robot design was Keepon [29] whose appearance is non-humanoid with a yellow snowman-like body and is 120mm tall. It has color cameras in both eyes and a nose that is a microphone. It has a silicone designed body, with 4 DoF. Keepon can turn its head up/down, left/right for eye contact. To express its emotions, it does so through body movements. For example, it sways from left to right or up/down. It also accentuates brief sounds from a built-in speaker. Keepon can express what it perceives.
There are several robots proposed only for children with ASD such as KASPAR [28], Leka [30], QTrobot [31], Buddy [32], Castor [33], and Moxie [34]. Many of them humanoid in appearance, but Leka is a multisensory spherical robot which emits subtle vibrations and lights up with colorful LEDs, plays music and chirps in anthropomorphic fashion. There are another zoomorphic such as Probo [35] and Pleo [36]. In addition, the social robots proposed are in English language, only Castor is Latino, but that indicates that most of the robots are not designed for a Latino society, the cultural part is a factor that affects the intervention. It indicates that studies designing robots for children with ASD are still unclear on the ideal appearance since anthropomorphic and non-anthropomorphic robots are found in the literature.
2.3. Emotional Communication
Bartsch and Hübner [37] propose a framework of emotional communication that comprises three interrelated levels of complexity: (1) innate stimulus-response-patterns, (2) associative schemata, and (3) symbolic meaning. It is related that people do not only communicate to exchange information but also it includes to exchange emotions. Therefore, emotional communication can be defined as a process of mutual influence between the emotions of communication partners. Reis and Sprecher [38] define emotional communication as the process of using messages to exchange information about and to influence each other’s emotional states, where messages may be verbal and nonverbal expressions of emotion. Derks et al. [39] define emotional communication as the recognition, expression, and sharing of emotions or moods between two or more individuals, which includes both explicit and implicit emotional communication.
Emotional communication is related to emotion theories and communication theories. There is no single definition or model. Theories of emotion can be grouped into three approaches: physiological, neurological, and cognitive. Williams Lange's theory [40] proposes a physiological approach, contending that emotions occur as a result of physiological reactions to events. Shachter and Singer [41], from a cognitive approach, propose that emotions are composed of two factors: physiological and cognitive, i.e., a stimulus leads to a physiological response that is then cognitively interpreted and labeled [42]. Meanwhile, Damasio proposes a neurobiological approach, which includes Damasio's Somatic Marker [43], in which he explains the relationship between emotions and reason.
Theories of communication provide a way to exchange information between one or more people. Shannon [44] proposed a mathematical theory of communication, which consists of five parts: (1) an information source that produces a message, where various combinations also can occur, for example, a visual channel associated with an audio channel; (2) A transmitter which operates on the message in some way to produce a signal suitable for transmission over the channel; (3) The channel is the medium used to transmit the signal from transmitter to receiver; (4) The receiver performs the inverse operation of that done by the transmitter; (5) The destination is the person from whom the message is intended. Lasswell [45] describes an act of communication as answering the following questions: who?, says what?, in which channel?, to whom?, and with what effect?.
2.4. Social Robot’s Emotional Communication
A social robot can capture information about the environment through sensors. Therefore, a robot can have several channels to capture information, such as: visual, auditory, physiological, and tactile. This information is about emotions transmitted by a person, which can be manifested as verbal and non-verbal (gestures) expressions. The social robot receives the information (message) and interprets and expresses an emotional behavior. So, communication between humans - the robot can be a process that includes transmitter, message, and receiver, where messages are interchanged through communication channels that allow input and output.
The input describes how information is captured by the robot, and the output describes how the robot expresses with the human. Both input/outputs can include visual, auditory, and tactile channels. However, physiological response rarely is considered. Also, designers of social robots should take all perceivable cues of a robot as well as the human audience into account when estimating communication effects, e.g., visible cables and emergency stop, the color with which LED lights [46].
A study by Bonarini [47] mentions that all signals involved on the different channels are coherent to obtain effective message exchange and establish a good relationship between human-robot. However, the study mentions limitations imposed by sensors, computational power, mechanical implementation, and the role to be played.
Transmitting the information is essential so the user can motivate and understand the message. A study made [48] found that individuals with ASD often show superior visual detection. Also, they often exhibit atypical sensory behaviors, such as adverse responses to specific sounds or textures, objects touching, and visual fascination with lights or movement.
2.4.1. Visual Channel
Robots can exploit this channel through light, images, or motion. But also can perceive information from the environment through sensors such as a camera. For example, the robot detects an object through a sensor, which prevents it from moving in a certain direction; its reaction may be to choose another path or to keep still. If the robot is to have cognitive behavior, support from computational models is needed to allow the robot to predict motor intentions.
Light can be emitted by LED or other light sources that exploit color, intensity, and rhythm to express a message or emotion. These LEDs can be organized into matrices, which can be used on the eyes and mouth, among others.
The screen is used to animate parts of the faces or also can be used to interact with the user through the robot in the telepresence experience. Another alternative is motion, which can express a behavior with its body or parts of it. Also, it is used for facial expressions because they are key to understanding emotions [49].
On another hand, the robot can capture through a visual channel environment using sensors such as cameras or Infrared thermal cameras that can detect emotional changes through variations in skin temperature. Usually, this is done by considering temperature variations in specific regions such as the nose, forehead, and cheeks [50].
2.4.2. Hearing Channel
The hearing channel enables the robot to capture sounds from the environment. The sensor used to capture sound comes with one or more microphones and is usually located in each ear of the robot. There is also the case of an ultrasound sensor whose purpose is to measure the distance of the ultrasonic waves to detect an object. Thus, this type of sensor uses emitting and receiving ultrasonic waves to measure the distance from an object; its operation is, therefore, a proximity sensor. Usually, these types of sensors are found in educational robots. Due to their shape, they can simulate the robot’s eyes. Meanwhile, the microphones can simulate ears localized on each side of the head; an example is the Nao robot.
On the other hand, sounds can be used by robots to express emotions. However, speech with children with ASD can be difficult when the individual with ASD has difficulty conversing. A study by Barakova et al. [51] examined the number of vocal interactions between child-robot, which they found did not significantly increase across sessions.
A hearing channel is a form of verbal communication that uses computer models to perceive/recognize sounds. As such, it can follow instructions through speech [52]. For this type of verbal communication, the support of natural language processing techniques is needed so that the robot can verbally understand the user [53].
Another alternative in low-cost robots is to use a sensor to emit sounds recorded in mp3 format to execute voice commands, along with speakers to produce the sounds. It can be integrated into the turn with natural language computational models, so the robot responds verbally. Therefore, some have focused on a question-and-answer dialogue.
2.4.3. Touch Channel
Touch channel is used in humans to perceive and interpret stimuli from the environment. This perception is achieved therefore in robots using touch sensors with different purposes, to measure either forces in a particular area or contact. However, this tactile perception occurs at a single point of contact, as an artificial skin [54]. For example, the Nao robot has a single point of contact, where it has a touch sensor located on the top of the head [55]. In robotics, tactile information is used as a control parameter [56]. One of the most straightforward sensors to interact in a tactile way is the pulsed sensor represented in binary states (1, pulsed; 0, not pulsed). It can be used for shock control, and for the presence of an object. Furthermore, there are capacitive sensors that are often used to detect affective gestures such as hugs or caresses [57]. The touch channel has become a key technology to interact with robots, either for sensing or vibro-tactile response [58].
Some robots can be interpreted from accelerometer and gyroscope sensors, which is used to detect all sort of activity, usually used by an implicit communication. Data capture through inertial sensors (accelerometer and gyroscope) can be used to interpret the manipulation or gestures [59].
2.4.4. Physiological Channel
These types of sensors that capture the physiological responses of a human have been oriented to emotional detection, where physiological sensors - temperature, pulse meters, galvanic response, etc. - have been used. However, as already mentioned, children with ASD are not aware that their emotions can affect their physiological responses. For example, when afraid, this behavior includes sweating (galvanic response), increased heart rate (faster heartbeat), and high levels of adrenaline, which make us extremely alert [60]. Depending on the context, this experience of fear can be positive or negative. Furthermore, when angry, our body temperature, heart rate, and blood pressure all increase [61]. In some people, due to the change in temperature, the blood vessels dilate, thus causing the ears to change to a red color, or when we are cold, the nose becomes red. However, these types of expression are usually involuntary reactions and are often difficult to regulate.
3. Design Path
Designing social robots requires a deep understanding of human behaviors, more if the public is children with ASD. The design of a social robot is multidisciplinary because it includes areas such as psychology, neuroscience, human factors, design, anthropology, and artificial intelligence, among others. Therefore, we proposed a path of design based on the User Centered Design (UCD) approach [62] to design a social robot for individuals with ASD. This proposal was mainly influenced by two studies conducted by [63], [64] and [16].
Figure 1.
Path for designing a social robot for children with ASD.

3.1. Analysis
To know the problem's solution, it is necessary to analyze the use context and users. Focusing on what characterizes the user, and what they are trying to achieve, the needs. Therefore, participants are parents, therapists, and children with ASD. Methods such as interviews, questionnaires, focus group and direct observation can be used to investigate participant’s perceptions. In a study made by [17] sensitization allows to know about their views and ideas on and about robotics, where authors formulated three questions such as, how they image a robotic device, how robots could assist in therapies? and how they imagined a robot to benefit in therapy?
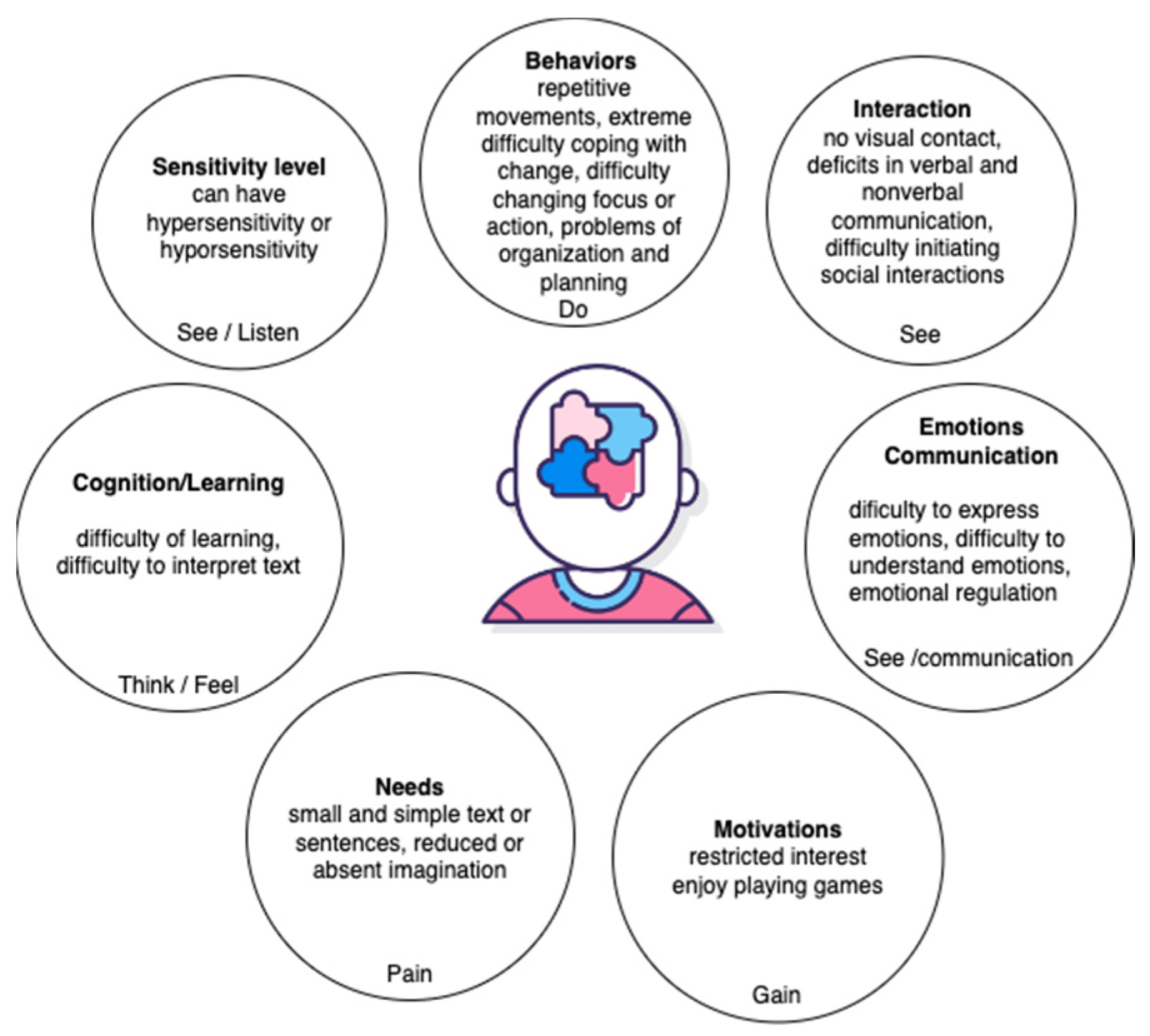
A Child with ASD has difficulties of communication and social interaction. Therefore, use tools that allow obtaining information from children with non-verbal communication through emotion analysis techniques. However, to analyze emotions require of experts. There is a technique called empathy map (EM) used in the design thinking methodology. EM can be used by inexperienced developers and/ or designers with short-term results. Da Silva et al. [65] proposed an empathy map centered for autism called EmpathyAut, based on the traditional empathy map model. EmpathyAut covers main areas such as cognition /learning (feel /think), interaction (see), communication (say), behavior (do), relationship with sound/noise level (listen), needs (pain), and motivations (gain). The authors designed a characterization form, which includes 33 items representing the absence (0) or presence (1) of the characteristic on autistic person. Empathy Map aimed at children with ASD, especially those with low/medium functioning.
Focus group is a quality method, which was used with parents and professionals to identify intervention requirements to create a new robot [64]. Activities made were (1) capturing demographic information, (2) demonstration of a social robot called Kaspar (3) discussion of how interventions with Kaspar robot must be. Other techniques such as direct observation, interviews and questionnaire have been applied to parents of children with ASD.
Also, a comparative study which allows to analyze three or more robotics platforms comparing functionalities, aspects of the robot one another and distinguishing their similarities and differences. A study conducted by Puglisi et al. [66] selected a set of social humanoid commercial robots for children with ASD, where made a comparative analysis identifying characteristics, advantages vs disadvantages for each robotic platform.
3.2. Ethical Considerations
Ethical considerations are related between user and the robot, guiding the interactions the two [67], some aspects that are considered such as physical safety, data security, transparency, emotional consideration, and behavior. Value Sensitive Design is an integration of ethics during the technology’s design that accounts for human values in a principle and comprehensive manner throughout the design process [68].
3.3. Aspects of design
A set of aspects must be considered such as: environment, form, modality, communication, and behavior.
- A.
- Environment
The environment examines the role of the robot to interact with children with ASD. In studies reviewed in interaction between child with ASD and social robot. Huijnen et al. [64] defined seven roles for ASD such as: provoker, reinforcer, trainer, mediator, prompter, diagnose and buddy. We defined robot roles such as therapist, assistant, mediator, and play partner.
- B.
- Form
The form is related with the appearance of a robot for children with ASD is a variable important, which can influence in the interaction between child-robot. However, some studies reviewed have used robot anthropomorphic and caricatured. In the literature found a humanoid robot is perceived as humanlike and elicits strong expectations about the robot’s social and cognitive competencies [69] than a zoomorphic robot which is perceived more functions of an animal, and with a lower level of functioning. In addition, if the robot is humanoid, should consider if is a boy/girl or adult. The studies reviewed show that most of the robots designed have the appearance of a child. In addition, the size of robot can affect the interaction, more because in children with ASD is worked the attention or joint attention [70], so the robot must stablish visual contact with the child/girl. The movements of a robot can be rated from machinelike, to hybrid, to lifelike. However, smooth movements require more mechanical movement quality, more if can be used to express emotions and maintain social relationships.
- C.
- Modality
It defines as the number of communication channels engaged, which can be unimodal (one channel) to multimodal, considering channels such as: visual, auditory, haptic, and physiological.
- D.
- Communication
It is related with communication channels which can be visual, auditory, touch and physiological.
- E.
- Interaction
In this aspect is related the autonomy of operation mode of the robot, which is related with capabilities to act without direct input from a person. In addition, autonomy is a requirement for a social robot. A remote-controlled robot cannot consider to be social since, because it does not make decisions by itself.
- F.
- Behavior
Studies found in [71] made a comparation of several robots in the therapy of children with autism, where grouped different robots in therapy model and targeted behavior. It was defined a set of skills such as imitation, joint attention, turn-taking, self-initiated interactions, and emotions.
3.4. Ideas of Design
There are tools and methods that can be used to support the ideas solution. Cards are very common tool for design workshops, which it is used to support participatory design activities [16]. The cards can help to build new ideas. Also, can be used to guide the design process. These tools can be to identity requirements in the design of a social robot. In this stage is important consider guidelines used in Human Robot Interaction (HRI) to create robotic applications. Some found were guidelines for robot behaviors [72], guidelines to design a social robot for autism [17] and general HRI guidelines [73].
3.5. Prototypes
As in software prototyping, scenarios and wireframes of low fidelity can be used during the early requirement analysis. Wireframes (low fidelity) are usually based on the drawing of the 2D interfaces objects such menus, buttons, among others. Therefore, applied to robots, a robotic platform is an interface, which can be considered aspects such as form, modality, and communication. Also, it is important in robotic prototyping to make the scenarios interactive, which can be implemented in a storytelling related with flow of interaction, which can be analyzed aspects such as: interaction and behavior.
4. Case of Study
Following the design path applied to design a social robot for children with ASD.
4.1. Analysis
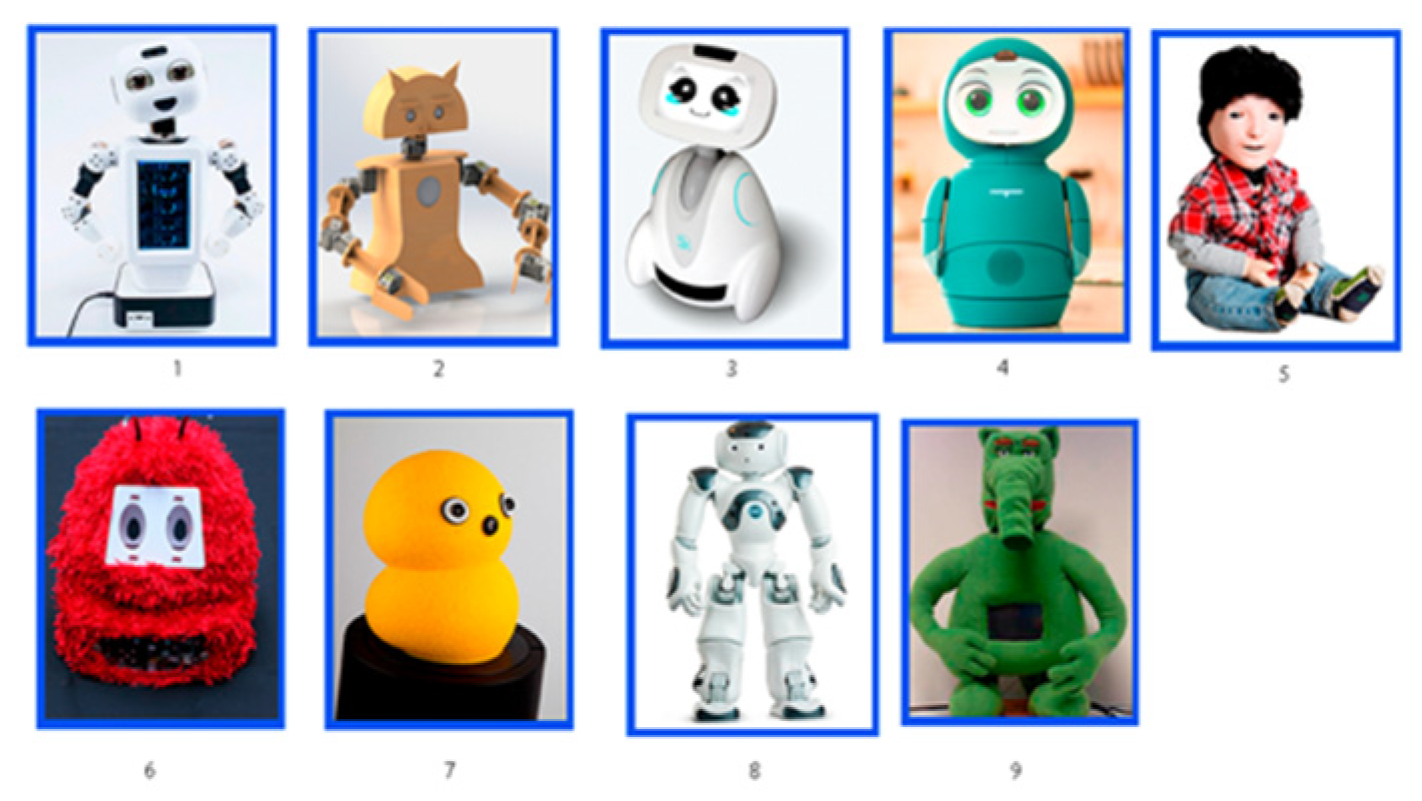
Since these children have communication problems, panels composed of experts, therapists, parents, and teachers were asked to give their opinion. To know the needs of the child with ASD was designed a questionnaire, which was applied to 18 parents and five specialists (psychology, neuropsychology, nutritionist, and social worker) in children with ASD. The questionnaire is composed by two parts: the first part to know about the child's emotional state (express, perceive and understand), kinds of interventions therapy and use of the technology in therapy. The second part is to assign a Likert scale from 1 to 5 to a set of robot cards to find out the child's appearance preferences. Ten references to robots were selected where it was considered appearance, anthropomorphic, biomimetic, and non-biomimetic (see Figure 1).
Figure 2.
Robot Cards.
Some questions and answers given for specialists were:
Q1: What types of therapy have been used for children with ASD?
RQ1: Floortime/RDI, Development of social skills; executive functions and analytical therapy; therapy based behavioral; nutritional approach; and socio-affective therapy.
Q2: What strategies have been used to teach children with ASD to understand emotions can be associated with physiological signals?
RQ2: Multimedia content (videos), drawings, use of visual aids and phonological gestures (AAC), self-knowledge, role-playing, speaking, etc.
Q3: Have you used technologies in therapy interventions?
RQ3: 60% answer "yes", 40% have not used it.
Q4: Imagine a therapy with robots, what would be the best and worst aspects?
RQ4: It should not be too colorful; it should be gentle and soft. The child's attention and feel at ease and curious. It should look friendly and have pleasant characteristics such as, for example, a pleasant smell, sweet voice, neutral texture, etc. Stimuli should be limited.
Q5: If a person with ASD interacts with a robot, what kind of physical communication gestures should the robot make?
RQ5: It should be trained in basic emotions, with a prosody that is not particular but very natural, with decibels in accordance with the hyper-sensoriality of some. A very human face. Another response was, the imitation and then the robot would perhaps make a pattern and most likely with this it would discover something that we as humans do not recognize. The robot must be greeting, smiling, responding to gestures of the child.
The robot should look directly into the child's eyes, which is the most difficult thing for them, always facing him/her, not too close, with relaxed hands or arms that they can see so that they feel fear or something like that. The robot must keep your distance and let the child touch you in order to build trust.
Q6: What kind of affective tactile communication should the robot be able to feel, and what part of its body should be sensitive to touch?
RQ6: The robot should be sensitive to the child's head, face, and eyes. The part of the body that should be sensitive to touch in hands, head, and abdomen.
The questions to the parents were focused on evaluating the robot appearance, which was assigned in a Likert scale from 1 to 5 (Figure 4). Also, they were assigned to evaluate what parts of the body are better to express emotions.
Figure 3.
Results obtained of the appearance of the robot.

Figure 3 shows the results obtained. It observes that the robot 6 and robot 9 were the ugliest, which corresponds to the Keepon and Probo robot. Meanwhile the robot 1 and 8, both anthropomorphic scored better in appearance.
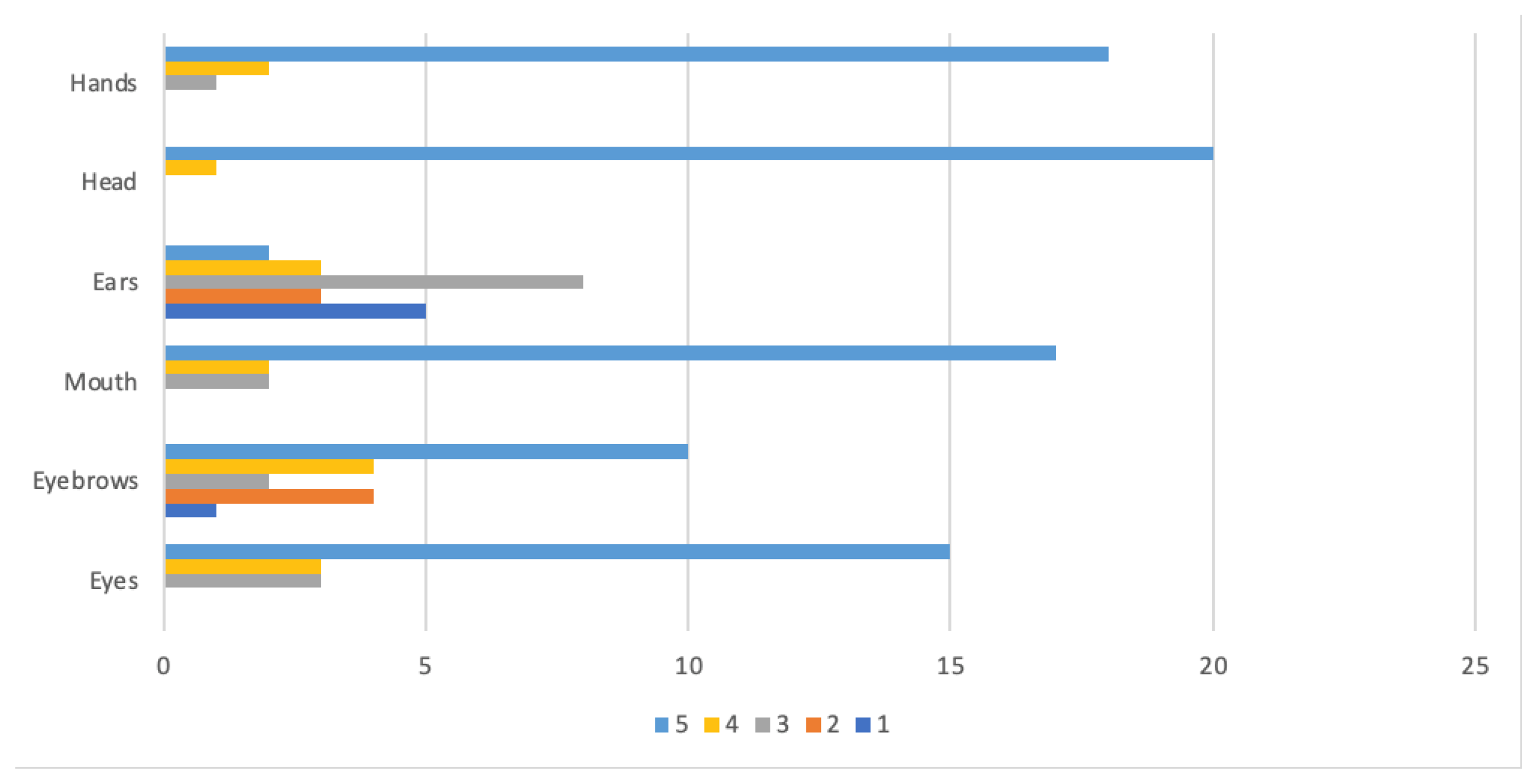
Figure 4.
Results obtained of the features of the body to express emotions.
Then with support of one phycologist was refined and validated the questionnaire to parents and therapist with ASD. Therefore, both instruments were validated by another psychologist, where were considered aspects to evaluated such as general objective of the research, clarity variable(s) category(ies) of analysis, item-variable (s) /category(ies) coherence, item measures variable (s) / category (ies), wording of items, item spelling, instrument presentation, population/sample selection, procedure, assisted consent, ethical, bioethical, and deontological issues.
Therefore, were recollected new information, where was applied to seven therapists (5 psychologic; 1 speech therapist; 1 teacher of special education), and 18 parents of children with ASD. Some information socio-demographic identified were: 86% have patients with ASD in the range of 5 to 10 years, where 43% work with severity level three, and 29% level one and two.
Questions and answers given for specialists were:
Q1: What types of therapy have been used for children with ASD?
RQ1: behavioral therapy, speech therapy/audiology, socio-affective therapy, and ABA therapy.
Q2: How do you teach a child with ASD to identify emotions and their physiological responses?
RQ2: Some answers were: Through games, stories, rounds, videos, examples and illustrations where the notion of theory of mind, symbolic play, imaginative function, recognition of one's own and others' emotions are developed. Activities are carried out in different contexts, as changes in behaviors are taken into account according to the child's space; in this sense, activities are carried out with materials that allow the child to identify and feel comfortable, this is something that is done frequently, so that the child manages to adapt to the activities and establishes the expected behavior; role play, PECS sheets.
Q3: Have you used technologies in therapy interventions?
RQ3: 86% answer "yes", 14% have not used it.
Q4: Imagine a therapy with robots, what would be the advantages and disadvantages?
RQ4: Some answers were:
- -
- Novelty, interaction with the object, ease of imitation disadvantages preference for the machine and inhibition or poor motivation for interaction with peers or others
- -
- Advantages could be the process of implementing advanced ICTs in these therapies, recognition of new strategies by children and their families. Disadvantages could be poor adaptation of children with ASD and associated visual diagnoses.
- -
- The advantages of having a robot are to be able to have a continuous and specific programming of skills in which it will work and will be constantly exposed through the robot without emotional alterations of a therapist if not specific programming and disadvantages is the issue of predictable environments in a time of crisis in which the least can be pitied with the robot.
- -
- Advantage innovation, disadvantage that they get used to and lose communication with the human being.
Q5: If a person with ASD interacts with a robot, what kind of physical communication gestures should the robot make?
RQ5: Some answers were:
- -
- Make gestures approximating to signs for greeting, requesting, pointing.
- -
- The robot should be clear in your tone of voice, movements, or sounds.
- -
- Facial expressions
- -
- Have understandable facial expression, straight posture.
- -
- Imitation of all kinds
Q6: What kind of affective tactile communication should the robot be able to feel, and what part of its body should be sensitive to touch?
RQ6: hands, face and head.
Q7: What emotions should the robot express?
RQ7: basic emotions such as joy, sadness, anger and the complex one’s such as pride, empathy, embarrassment.
Q8: What might a robot look like (e.g. animal, humanoid, large, small, etc.)?
RQ8: all answers were humanoid.
Q9: What shouldn't a robot used in therapy for children with ASD have?
RQ9: Some answers were:
- -
- Robotic voice
- -
- Loose or pointed metal parts,
- -
- Loud or unexpected sounds
- -
- Sharp artefacts, loud sounds, loud colours, no glass or transparent panel as it would be distracting and the off button too hidden.
- -
- No robotic verbal language, but a "normal" voice.
Q10: Some robots (Figure 2) were shown so that you could assign a score How would you rate their appearance?
RQ10: Robot 1(average 2.91); Robot 2 (2.29); Robot 3(3.43); Robot 4(3.67); Robot 5 (2.00); Robot 6(1.86); Robot 7(2.43); Robot 8 (3.00); Robot 9 (2.00).
Q11: Of the robots you have just seen, which one did you like the most, and what improvements would you make to its appearance?
RQ11: Eyes (average 4.71); Eyebrows (4.43); Mouth (4.86); Ears (2.71);
Q12: Which parts of the body do you think are most important for teaching a child with ASD about emotions?
RQ12: Head (average 4.57); Hands (5.0); another answer: heart with beats and arms.
Then, was obtained 18 answers of parents with children with ASD, which have a child with ASD between ages 10-15 years (50%); 3-5 years (17%); 5-10 years (33%).
Some questions formulated were:
Q1: Select the type of therapy that has been implemented for your child with ASD?
RQ1: Behaviour-based therapy (5); Speech therapy (6); Occupational therapy (4); Socio-affective therapy (1); Others (2)
Q2: Some robots (Figure 2) were shown so that you could assign a score How would you rate their appearance?
RQ2: Robot 1(3.94); Robot 2 (2.11); Robot 3(2.76); Robot 4 (3.61); Robot 5 (2.56); Robot 6(1.72); Robot 7 (2.00); Robot 8 (3.67); Robot 9 (2.22).
Q3: Of the robots you have just seen, which one did you like the most and what improvements would you make to its appearance?
RQ3: Some answers were: The real looking one of a boy. I would make boy and girl versions, highlighting facial features.
Q4: Of the robots you have just seen, which one did you like the most, and what improvements would you make to its appearance?
RQ11: Eyes (average 4.56); Eyebrows (3.72); Mouth (4.56); Ears (3.11);
Q5: Which parts of the body do you think are most important for teaching a child with ASD about emotions?
RQ5: Head (4.35); Hands (4.53); another answers: Arms.
According to DSM-V, information recollected through parents and experts in ASD was made an empathy map for autism, which Figure 5 shows components related to “listen”, “think and feel” and “say”. This map can help to provide information to designers in children with ASD. In addition, many robotic designers are unprepared to design robots for this audiencia.
Figure 5.
Empathy Map for children with Autism.
Finally, in this stage was made an analysis comparative of three social robots designed for children with ASD.

Table 1.
Analysis comparative of social robots for children with ASD.
| Hardware Aspects | Moxie | Nao | Kaspar |
|---|---|---|---|
| Appearance | Humanoid | Humanoid | Humanoid |
| Tall | 38.7 cm | 58 cm | 56 cm |
| Genre | - | - | Boy |
| Biped | False | True | False |
| Facial expressions | Using display representing face features such as: eyes, mouth, eyelips | Eyes, Voice | Eyes, Mouth, Eyelips, |
| Open Programming | False | True | True |
| Movements | Head, Torso, Arms, Neck and hands. | Head; Arms; Hand; Pelvis; Legs | Head, Neck, Arms, Torso |
| Servos Total (actuators) | 9 | 25 | 22 |
| Sensors | (4) Microphones, (1) Camera 5MP | OmniVision cameras; Inertial sensor; Sonar range finder; Infrared sensors; Tactile sensors; Pressure sensors;Microphones | Cameras in eyes; force sensors |
| Response multimodal | Voice and visual | Voice, tactile and visual | Visual, Tactile, and voice |
| Language | English | English | English |
4.2. Ethical Considerations
The interaction is done by facials and body expressions and voice and other visual elements. The height of the robot can be adjusted. The robot must allow register data by each interaction. It is suggested the red color to associate mainly with negative feelings in the social interaction. The robot must be autonomous in its interactions. The robot must be programmed to engage in a wide range of social behaviors.
According to the questionnaire applied to specialists and parents in children with ASD, some ethical considerations were mentioned:
- -
- Robot should have humanoid appearance.
- -
- Emotions express using facial expressions, body expressions and hands.
- -
- The robot should allow to be adjusted the genre and girl robot or boy robot.
- -
- The robot's voice should not be robotized.
- -
- The robot should express basic emotions and some complex such as: pride, empathy, embarrassment.
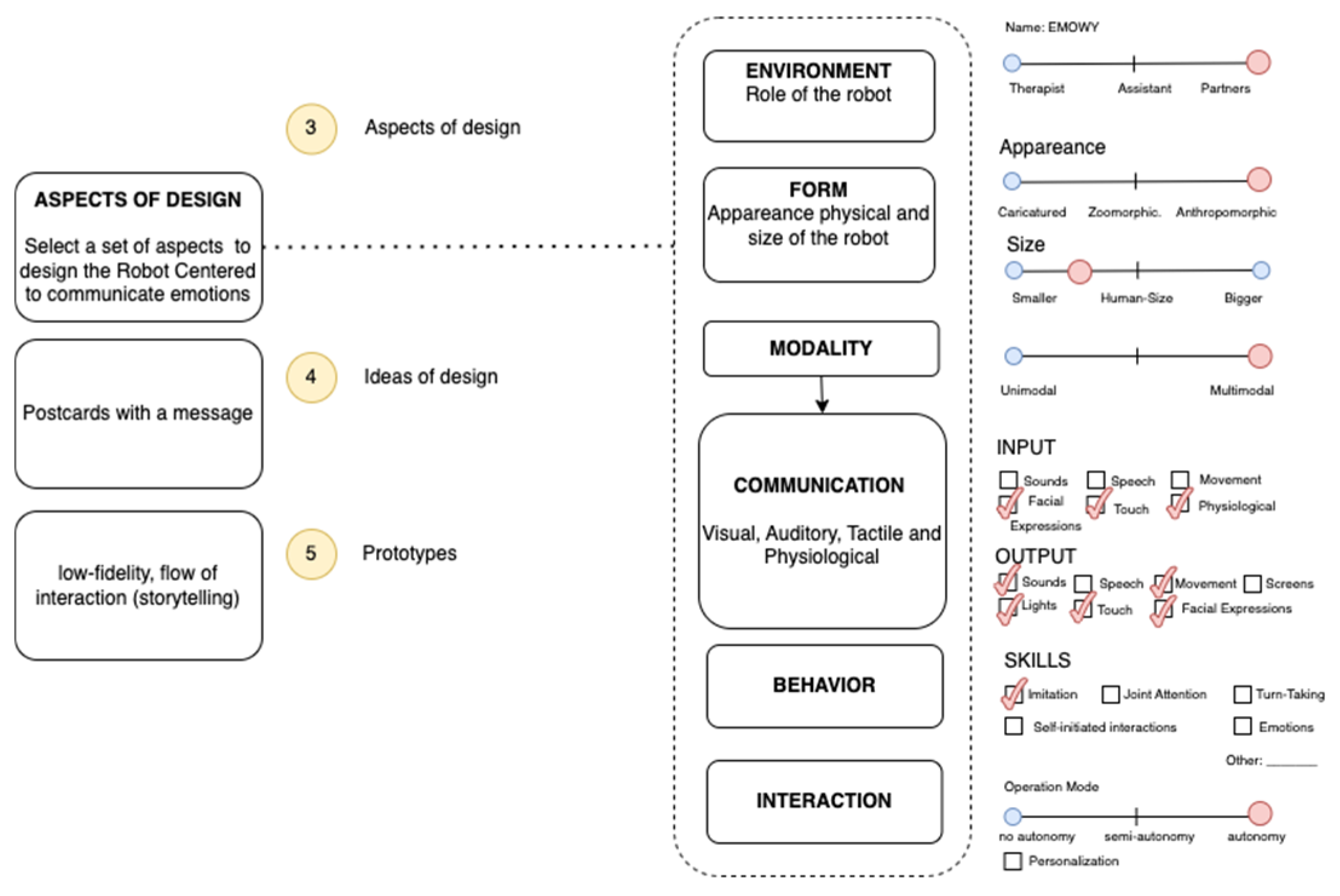
4.3. Aspects of design
Figure 5.
Aspects of design according to the recollected information.
4.4. Ideas of Design
Figure 6 shows some ideas for design-type sketches and wireframes of low fidelity. According to the needs identified, it was taking account that a robot must have an appearance humanoid; therefore, facial characteristics considered are eyebrows, nose, cheeks, ears, mouth, and eyes. Figure 6b-A, eyes are two low-cost OLED displays that simulate the blinking of an eye. It also was considered one RGB camera to recognize objects and people’s faces. Meanwhile Figure 6b-B, the eyes are static, but the robot has eyebrows and eyelids, whose mechanics use servo motors. In the robot of Figure 6b-C, the eyes are LED matrix size 8 bits. In two prototypes, the nose is considered, a potentiometer represents Figure 6B-A, and Figure 6b-B is a buzzer. Another facial feature considered is the mouth, three prototypes represented by RGB matrix.
Figure 6b- B, the prototype presented has ears, which are two NEO-pixels 8 bits located on each side of the head, light up its ears whenever the robot is listening to the user and expresses a negative emotion. Finally, Figure 6b-A is considered cheeks, aiming to motivate the child to approach the robot and touch its cheeks.
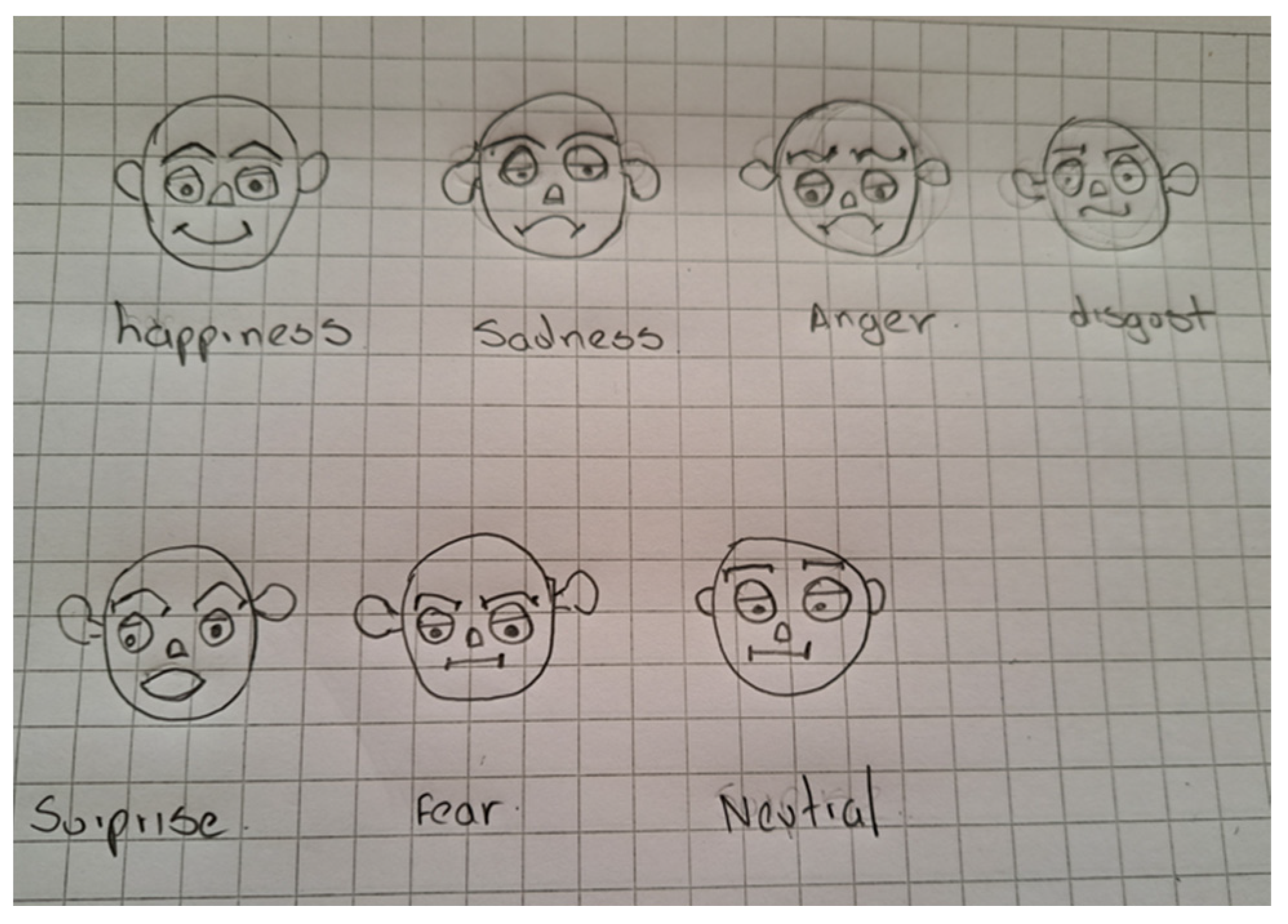
According to answers obtained in the questionnaire to experts and parents, the robot's appearance is essential. Therefore, it is selected the prototype Figure 6b-B, but modifying the form of the face. The expressiveness of emotions is fundamental to teaching emotions to children with ASD. Therefore, a face that can express basic emotions proposed by Ekman [74], such as anger, fear, happiness, sadness, surprise, and disgust, is designed.
On the other hand, physiological inputs and outputs are considered in design aspects. The thermal expression is associated with changes in the body temperature, and it is an involuntary response [75]. Typically, the change in body temperature is activated by negative emotional states. The use of a thermal expression in the social robot has benefits such as
- unaltered robot shape.
- privacy: Only the person who interacts physically with the robot can feel the thermal stimulus.
- if the people who do not interact physically with the robot cannot perceive the thermal stimulus.
The output temperature is localized in the torso of the robot, and it is considered a heating plate, which can be heating. However, as an emotional expression, the temperature requires a higher degree of abstraction to be understood as an emotional state. For capturing physiological inputs such as Galvanic Sensor Response, Temperature, and Heart Rate, was decided that the child must use a wearable device type bracelet or smartwatch as an external accessory.
Figure 7.
Sketches of Facial expressions.
4.5. Prototype
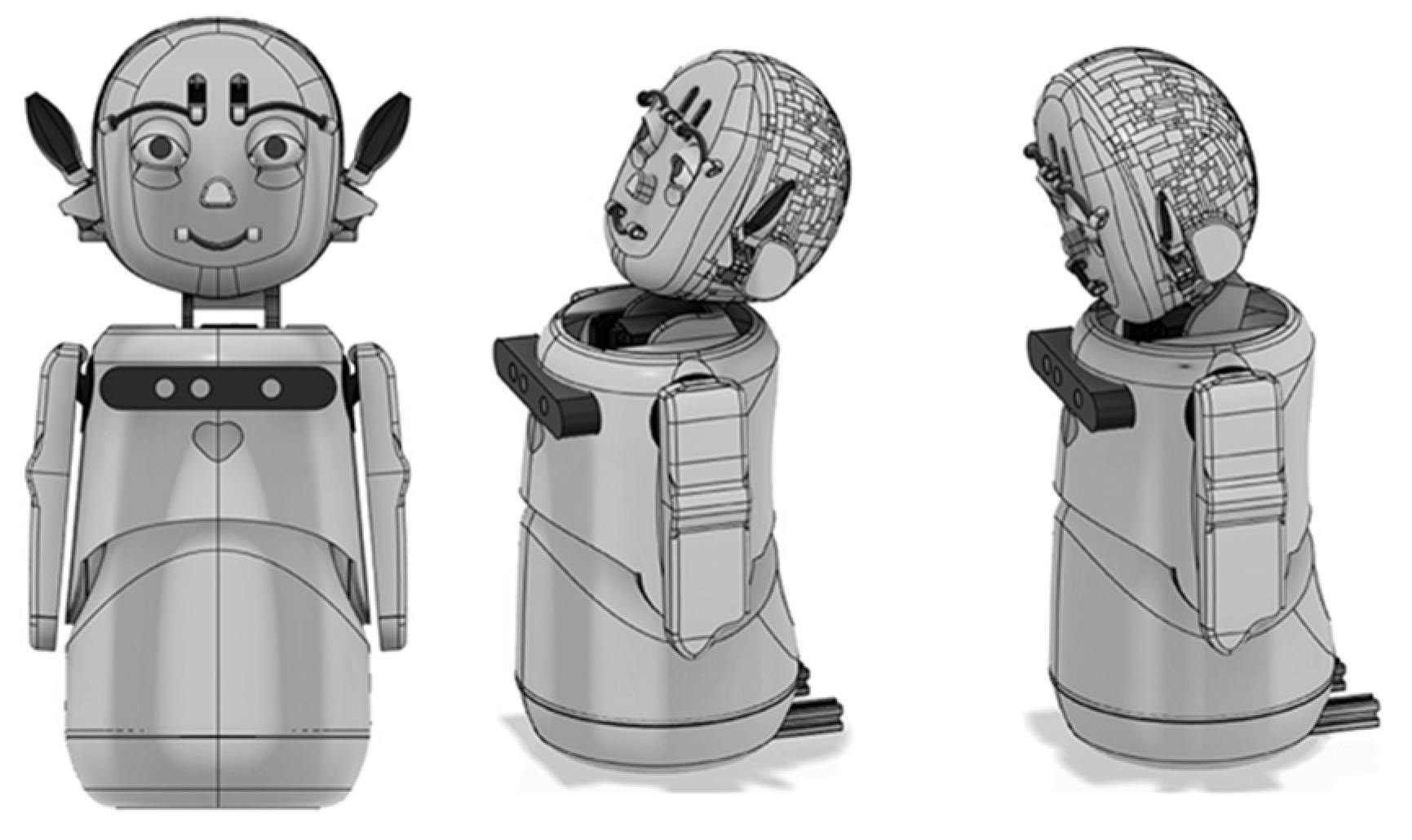
After of conception of some design ideas were selected a set of inputs and outputs for the social robot and proposed a final version of the robot. Figure 7 shows a 3D model of the social robot with humanoid appearance and child because the role of robot is partner. Body expressions are considered such as movements of head, neck, arms, torso, and hands.
Figure 7.
3D models. .
3D models were designed and printed the pieces and was implemented the inputs and outputs hardware of the robot. To demonstrate the robot using all its mechanical features to emulate and express emotional states a script was designed, it consists of a history of a tiny robot that is craving human interaction (Figure 8), because it can’t feel sad, but when a human talks to it, it becomes happier and start to dance.
Figure 9-10 show some facial and body expressions of the robot, which was implemented to evaluate some factors of the robot.
Once implemented the basic functionalities, the UEQ questionnaire [76] was applied to evaluate scales such as:
- -
- Attractiveness: the impression of the product
- -
- Perspicuity: Easy to use and follow the product
- -
- Stimulation: how engaging the product is
- -
- Novelty: the novelty of the product
UEQ has been grouped into six scales, where each item is evaluated on a 7-point Likert scale. The answers are scaled from -3 (fully agree with the negative term) to +3 (fully agree with the positive term). Half of the items start with the positive term, the others with the negative term. Attractiveness is a pure valence dimension (emotional reaction on a pure acceptance /rejection dimension). Stimulation and Novelty are hedonic quality aspects related to pleasure or fun while using the product. This questionnaire is enabled on www.ueq-online.org in several languages.
A group of twelve experts in areas such as psychology (1), Human-Computer Interaction (HCI) (7), Human-Robot Interaction (HRI) (2), and parents of children with ASD (2) applied the UEQ. Figure 11 shows the results obtained, which were satisfactory.
Table 2.
UEQ Scales (Mean and Variance).
| Attractiveness | 1.652 | 0.23 |
| Perspicuity | 1.434 | 0.11 |
| Stimulation | 2.023 | 0.11 |
| Novelty | 1.773 | 0.23 |
The scales of the UEQ can be grouped into pragmatic quality (Perspicuity, Efficiency, Dependability) and hedonic quality (Stimulation, Originality). Pragmatic quality describes task related quality aspects, hedonic quality the non-task related quality aspects. Therefore, Table 3 shows the mean of the three pragmatic and. Hedonic quality aspect is calculated. Therefore, the results are very satisfactory overall on the hedonic quality.
5. Discussion
The communication of emotions is essential to reinforce in children with ASD due to deficits in perceiving, understanding, and expressing emotion. Therefore, the robot's appearance can be essential to communicate emotion and motivate the child with ASD, more if the robot has the partner role. Robins et al. [77] presented a study about the impact of a robot's appearance on interaction for children with ASD. The robot must not be too human-like because it can lose interest in the child. Also, avoid complex facial expressions to enhance simplicity. Therefore, the prototype was considered humanoid, including facial features such as: eyes, eyebrows, mouth, eyelids, and nose. Another important aspect is the appropriate size because the robot must establish eye contact with the child. According to [78], children tend to show greater stimulation in response to robot with pet-like or cartoon-like features. Humanoid robot may be preferred to teach emotional skills. Kozima et al. [79] mention that robots with overly mechanized appearances may also not yield the best results since too many exposed mechanical parts.
In the data collection conducted to investigate some aspects of children with ASD, reading and interpreting facial expressions and body language [80] is challenging for them. It is because interacting with others can involve excessive sensory stimulation, leading to distress. Thus, Human-Robot interactions are different as robots can be programmed to show basic emotions. In turn, it can communicate with the child through simple tasks in such a way that it can avoid sensory overload [81]. So also, communicating emotion through various channels can cause an overload. Therefore, it is necessary to establish which channels are the most appropriate for expressing emotions so that they can understand the emotional state.
On the other hand, children with ASD tend to express hostile rather than positive emotional states, and very often, these negative emotional states can influence specific physiological responses, which they may be somewhat unaware they are affected. So, acting out physiological responses can support them to be aware.
The design of a social robot can follow a UCD approach, which involves applying a set of methods and techniques to investigate the user and the context of use. It facilitates the creation of mechanical interfaces according to the user's needs, especially when the target audience is children; this means designing for the needs, abilities, and expectations of children with ASD regarding technology.
On the other hand, the design of a social robot could follow an inspirational design according to the three aspects proposed by Norman [82], where there are three levels of design, such as: visceral, behavioral, and reflective, which can be related to three ways such as appearance, functionally and symbolically.
6. Conclusions
The communication of emotions is essential to reinforce in children with ASD due to deficits in perceiving, understanding, and expressing emotion. However, specific sensory channels are more significant in children with ASD, who also process sensory information differently from children without ASD. In turn, children with ASD tend to express negative emotional states more than positive ones, and very often, these negative emotional states can influence specific physiological responses of which perhaps in some way they may be unconscious that it affects them.
Several studies found that the design of a robot for ASD are oriented towards visual and auditory cues. Although they are usually very visual, they are not usually very auditory, and more work needs to be done on the tactile part. This aspect was identified on the design path in the first stage, which consists of analyzing information related to autism and therapy.
On the other hand, the case study that was applied using the design path shows that by following the user-centered design approach, a mechanical interface can be obtained according to the user's needs and not thinking about the user. Therefore, it is vital to involve the end-users; in this case study, the methods were applied to parents or specialists with ASD because children with ASD have external communication. In the future, a part of the participatory design could be applied to them, where they can design the robot's appearance but not the functionalities.
References
- American Psychiatric Association, 2013. Diagnostic and Statistical Manual of Mental Disorders. 5th ed., Washington, DC. [CrossRef]
- World Health Organisation/World Bank. The World Report on Disability. Geneva, Switzerland: WHO; 2011.
- Samadi, S. A., & McConkey, R. (2011). Autism in developing countries: lessons from iran. Autism research and treatment, 2011, 145359. [CrossRef]
- Kirkovski, M., et al.: A review of the role of female gender in autism spectrum disorders. J. Autism Dev. Disord. 43(11), 2584–2603 (2013). [CrossRef]
- Robins, B., Dautenhahn, K., Boekhorst, R.T. et al. (2005). Robotic assistants in therapy and education of children with autism: can a small humanoid robot help encourage social interaction skills?. Univ Access Inf Soc 4, 105–120. [CrossRef]
- Reeves, B., Nass, C. (1998). The Media Equation: How People Treat Computers, Tele- vision, and New Media like Real People and Places. Cambridge University Press (2nd edition).
- Kozima, C. Nakagawa and Y. Yasuda (2005). Interactive robots for communication-care: a case-study in autism therapy, ROMAN 2005. IEEE International Workshop on Robot and Human Interactive Communication, 2005., Nashville, TN, USA, 2005, pp. 341-346. [CrossRef]
- Ali S., Mehmood F., Ayaz Y., Asgher U., Khan M.J. (2020) Effect of Different Visual Stimuli on Joint Attention of ASD Children Using NAO Robot. In: Ayaz H. (eds) Advances in Neuroergonomics and Cognitive Engineering. AHFE 2019. Advances in Intelligent Systems and Computing, vol 953. Springer, Cham. [CrossRef]
- Huijnen, C.A.G.J., Verreussel-Willen, H.A.M.D., Lexis, M.A.S. et al. (2020) Robot KASPAR as Mediator in Making Contact with Children with Autism: A Pilot Study. Int J of Soc Robotics (2020). [CrossRef]
- Nikki Hurst and Caitlyn Clabaugh and Rachel Baynes and Jeff Cohn and Donna Mitroff and Stefan Scherer. Social and Emotional Skills Training with Embodied Moxie, arXiv, 2020. [CrossRef]
- A. P. Costa et al., "More Attention and Less Repetitive and Stereotyped Behaviors using a Robot with Children with Autism," 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2018, pp. 534-539. [CrossRef]
- C. M. Stanton, P. H. Kahn Jr, R. L. Severson, J. H. Ruckert, and B. T. Gill. (2008). Robotic animals might aid in the social development of children with autism. in HRI ’08: Proceedings of the 3rd ACM/IEEE international conference on Human robot interaction, 2008, pp. 271–278. [CrossRef]
- Kunold, L.; Onnasch, L. A Framework to Study and Design Communication with Social Robots. Robotics 2022, 11, 129. [CrossRef]
- Su, Y., Ge, S.S. (2017). Role-Oriented Designing: A Methodology to Designing for Appearance and Interaction Ways of Customized Professional Social Robots. In: , et al. Social Robotics. ICSR 2017. Lecture Notes in Computer Science(), vol 10652. Springer, Cham. [CrossRef]
- C. Bartneck and J. Forlizzi, "A design-centred framework for social human-robot interaction," RO-MAN 2004. 13th IEEE International Workshop on Robot and Human Interactive Communication (IEEE Catalog No.04TH8759), Kurashiki, Japan, 2004, pp. 591-594. [CrossRef]
- Minja Axelsson, Raquel Oliveira, Mattia Racca, and Ville Kyrki. 2021. Social Robot Co-Design Canvases: A Participatory Design Framework. J. Hum.-Robot Interact. 11, 1, Article 3 (March 2022), 39 pages. [CrossRef]
- Ramírez-Duque, A.A., Aycardi, L.F., Villa, A. et al. Collaborative and Inclusive Process with the Autism Community: A Case Study in Colombia About Social Robot Design. Int J of Soc Robotics 13, 153–167 (2021). [CrossRef]
- Belpaeme, T., Vogt, P., van den Berghe, R. et al. Guidelines for Designing Social Robots as Second Language Tutors. Int J of Soc Robotics 10, 325–341 (2018). [CrossRef]
- Hannah Louise Bradwell, Gabriel E. Aguiar Noury, Katie Jane Edwards, Rhona Winnington, Serge Thill, Ray B. Jones. Design recommendations for socially assistive robots for health and social care based on a large-scale analysis of stakeholder positions: Social robot design recommendations, Health Policy and Technology, vol 10 (3), 2021, 100544, ISSN 2211-8837. [CrossRef]
- Field T., Nadel Jacqueline and Ezell Shauna. (2011). Imitation Therapy for Young Children with Autism, Autism Spectrum Disorders - From Genes to Environment, Tim Williams, IntechOpen. Available from: https://www.intechopen.com/books/autism-spectrum-disorders-from-genes-to-environment/imitation-therapy-for-young-children-with-autism. [CrossRef]
- Charman Tony (2008). Why is joint attention a pivotal skill in autism? Phil trans R. Soc, 358, 315-324, 2003. Michael A. Goodrich and Alan C. Schultz (2008), "Human–Robot Interaction: A Survey", Foundations and Trends® in Human–Computer Interaction: Vol. 1: No. 3, pp 203-275. [CrossRef]
- Holler, J., Kendrick, K.H., Casillas, M., Levinson. (2015). S.C.: Editorial: turn-taking in human communicative interaction. Front. Psychol. 6(DEC), 1–4, 2015. [CrossRef]
- Baron-Cohen, S., Golan, O., & Ashwin, E. (2009). Can emotion recognition be taught to children with autism spectrum conditions? Philosophical transactions of the Royal Society of London. Series B, Biological sciences, 364(1535), 3567–3574. [CrossRef]
- Breazeal, C. (2002). Designing Sociable Machines. In: Dautenhahn, K., Bond, A., Cañamero, L., Edmonds, B. (eds) Socially Intelligent Agents. Multiagent Systems, Artificial Societies, and Simulated Organizations, vol 3. Springer, Boston, MA. [CrossRef]
- Breazeal, C. (2000), "Sociable Machines: Expressive Social Exchange Between Humans and Robots". Sc.D. dissertation, Department of Electrical Engineering and Computer Science, MIT.
- Kerstin Dautenhahn. Robots as social actors: Aurora and the case of autism In Proceedings of the Third Cognitive Technology Conference, 1999.
- Billard A (2003) Robota: clever toy and educational tool. Robot Autonom Syst 42(3–4):259. [CrossRef]
- Kozima H, Nakagawa C, Kawai N, Kosugi D, Yano Y (2004) A humanoid in company with children. In: 4th IEEE/RAS international conference on humanoid robots, 2004., (IEEE, 2004), vol 1, pp 470–477. [CrossRef]
- Dautenhahn K, Nehaniv CL, Walters ML, Robins B, Kose-Bagci H, Mirza NA, Blow M (2009) KASPAR - a minimally expressive humanoid robot for human-robot interaction research. Appl Bionics Biomech 6(3–4):369. [CrossRef]
- Hideki Kozima and Marek Piotr Michalowski and Cocoro Nakagawa. Keepon: A playful robot for research, therapy, and entertainment. International Journal of Social Robotics, 2009. [CrossRef]
- https://leka.io, (accessed on 04 August 2021).
- A. P. Costa et al., "More Attention and Less Repetitive and Stereotyped Behaviors using a Robot with Children with Autism," 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2018, pp. 534-539. [CrossRef]
- Gregoire Milliez. 2018. Buddy: A Companion Robot for the Whole Family. In <i>Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction</i> (<i>HRI '18</i>). Association for Computing Machinery, New York, NY, USA, 40. [CrossRef]
- Casas-Bocanegra, D.; Gomez-Vargas, D.; Pinto-Bernal, M.J.; Maldonado, J.; Munera, M.; Villa-Moreno, A.; Stoelen, M.F.; Belpaeme, T.; Cifuentes, C.A. An Open-Source Social Robot Based on Compliant Soft Robotics for Therapy with Children with ASD. Actuators 2020, 9, 91. [CrossRef]
- Nikki Hurst and Caitlyn Clabaugh and Rachel Baynes and Jeff Cohn and Donna Mitroff and Stefan Scherer. Social and Emotional Skills Training with Embodied Moxie, arXiv, 2020.
- Moerman, C. J., & Jansens, R. M. (2020). Using social robot PLEO to enhance the well-being of hospitalised children. Journal of Child Health Care. [CrossRef]
- Aubrey Shick. 2013. Romibo robot project: an open-source effort to develop a low-cost sensory adaptable robot for special needs therapy and education. In <i>ACM SIGGRAPH 2013 Studio Talks</i> (<i>SIGGRAPH '13</i>). Association for Computing Machinery, New York, NY, USA, Article 16, 1. [CrossRef]
- Bartsch, Anne; and Hübner, Susanne. "Towards a Theory of Emotional Communication." CLCWeb: Comparative Literature and Culture 7.4 (2005):. [CrossRef]
- Reis, H. T., & Sprecher, S. (Eds.) (2009). Encyclopedia of human relationships. SAGE Publications, Inc.. [CrossRef]
- aantje Derks, Agneta H. Fischer, Arjan E.R. Bos. The role of emotion in computer-mediated communication: A review, Computers in Human Behavior, Volume 24, Issue 3, 2008, Pages 766-785, ISSN 0747-5632. [CrossRef]
- William James. What is an Emotion?. Mind, Vol os-IX, Issue 34, 1 April 1884, Pages 188-205. [CrossRef]
- Schachter, S., & Singer, J. (1962). Cognitive, social, and physiological determinants of emotional state. Psychological Review, 69(5), 379–399. [CrossRef]
- Cannon, B. (1975). Walter B. Cannon: Personal reminiscences. In Brooks, C. McC., Koizumi, K., Pinkston, J. O. (Eds.), The life and contributions of Walter Bradford Cannon 1871–1945: His influence on the development of physiology in the twentieth century (pp. 151–169). New York: State University of New York.
- Damasio, A. (1994). Descartes’ Error: Emotion, Reason, and the Human Brain. New York: Grosset/Putnam.
- C. E. Shannon, "A mathematical theory of communication," in The Bell System Technical Journal, vol. 27, no. 3, pp. 379-423, July 1948. [CrossRef]
- Lasswell, H.D. The Structure and Function of Communication in Society. Commun. Ideas 1948, 37, 136–139.
- M. Val-Calvo, J. R. Álvarez-Sánchez, J. M. Ferrández-Vicente and E. Fernández, "Affective Robot Story-Telling Human-Robot Interaction: Exploratory Real-Time Emotion Estimation Analysis Using Facial Expressions and Physiological Signals," in IEEE Access, vol. 8, pp. 134051-134066, 2020. [CrossRef]
- Robertson CE, Baron-Cohen S. Sensory perception in autism. Nat Rev Neurosci. 2017;18:671–684. [CrossRef]
- Bonarini, A. Communication in Human-Robot Interaction. Curr Robot Rep 1, 279–285 (2020). [CrossRef]
- Hiromi Kobayashi, Shiro Kohshima. Unique morphology of the human eye and its adaptive meaning: comparative studies on external morphology of the primate eyes. Journal of Human Evolution, Vol 40 (5), 2001. [CrossRef]
- Florentina Adăscăliţei, Ioan Doroftei. Expressing Emotions in Social Robotics - A Schematic Overview Concerning the Mechatronics Aspects and Design Concepts, IFAC Proceedings Vol 45 (6), 2012, pp 823-828. [CrossRef]
- Barakova, E. I., Bajracharya, P., Willemsen, M., Lourens, T., & Huskens, B. (2015). Long-term LEGO therapy with humanoid robot for children with ASD. Expert Systems: International Journal of Knowledge Engineering and Neural Networks, 32(6), 698–709. [CrossRef]
- Lupis, S. B., Lerman, M., & Wolf, J. M. (2014). Anger responses to psychosocial stress predict heart rate and cortisol stress responses in men but not women. Psychoneuroendocrinology, 49, 84–95. [CrossRef]
- Sakai, T. Cincarek, H. Kawanami, H. Saruwatari, K. Shikano, and A. Lee, “Voice activity detection applied to hands-free spoken dialogue robot based on decoding using acoustic and language model,” in Proceedings of the 1st international conference on Robot communication and coordination. IEEE Press, 2007, pp. 180–187. [CrossRef]
- Cheng G, Dean-Leon E, Bergner F, Olvera JRG, Leboutet Q, Mittendorfer P. A comprehensive realization of robot skin: sensors, sensing, control, and applications. Proc IEEE. 2019;107(10):2034– 51. [CrossRef]
- Ioannou S., Gallese V., Merla A. (2014). Thermal infrared imaging in psychophysiology: potentialities and limits. Psychophysiology 51, 951–963. [CrossRef]
- Q. Li, O. Kroemer, Z. Su, F. F. Veiga, M. Kaboli and H. J. Ritter, "A Review of Tactile Information: Perception and Action Through Touch," in IEEE Transactions on Robotics, vol. 36, no. 6, pp. 1619-1634, Dec. 2020. [CrossRef]
- Berger, A. D. and P. K. Khosla (1991). "Using tactile data for real-time feedback." The International Journal of Robotics Research 10(2): 88-102. [CrossRef]
- Bonarini A, Garzotto F, Gelsomini M, Romero M, Clasadonte F, Yilmaz ANÇ. A huggable, mobile robot for developmental disorder interventions in a multi-modal interaction space. In: Proceedings of the 25th IEEE International Symposium on Robot and Human Interactive Communication (ROMAN 2016). New York: IEEE Computer Press; 2016. p. 823–30. [CrossRef]
- Alhaddad AY, Cabibihan J-J, Bonarini A. Influence of reaction time in the emotional response of a companion robot to a child’s aggressive interaction. Int J Soc Robot. 2020:1–13. [CrossRef]
- Roy, R.N.; Drougard, N.; Gateau, T.; Dehais, F.; Chanel, C.P.C. How Can Physiological Computing Benefit Human-Robot Interaction? Robotics 2020, 9, 100. [CrossRef]
- R. C. Luo, Shu-Ruei Chang, Chien-Chieh Huang and Yee-Pien Yang, "Human robot interactions using speech synthesis and recognition with lip synchronization," IECON 2011 - 37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, VIC, 2011, pp. 171-176. [CrossRef]
- Greenbaum J, Kyng M, editors. Deisgn at Work- Cooperative design of Computer Systems. Lawrence Erlbaum; Hillsdale, NJ, USA; 1991.
- Huijnen, C.A.G.J., Lexis, M.A.S., Jansens, R. et al. How to Implement Robots in Interventions for Children with Autism? A Co-creation Study Involving People with Autism, Parents and Professionals. J Autism Dev Disord 47, 3079–3096 (2017). [CrossRef]
- Áurea Hiléia Da Silva Melo, Luis Rivero, Jonathas Silva dos Santos, and Raimundo da Silva Barreto. 2020. EmpathyAut: an empathy map for people with autism. In <i>Proceedings of the 19th Brazilian Symposium on Human Factors in Computing Systems</i> (<i>IHC '20</i>). Association for Computing Machinery, New York, NY, USA, Article 45, 1–6. [CrossRef]
- Puglisi, A.; Caprì, T.; Pignolo, L.; Gismondo, S.; Chilà, P.; Minutoli, R.; Marino, F.; Failla, C.; Arnao, A.A.; Tartarisco, G.; Cerasa, A.; Pioggia, G. Social Humanoid Robots for Children with Autism Spectrum Disorders: A Review of Modalities, Indications, and Pitfalls. Children 2022, 9, 953. [CrossRef]
- Singh, D.K., Kumar, M., Fosch-Villaronga, E. et al. Ethical Considerations from Child-Robot Interactions in Under-Resourced Communities. Int J of Soc Robotics (2022). [CrossRef]
- Batya Friedman, Peter H. Kahn, and Alan Borning. 2008. Value sensitive design and information systems. In The Handbook of Information and Computer Ethics, 69–101.
- Qbilat, M.; Iglesias, A.; Belpaeme, T. A Proposal of Accessibility Guidelines for Human-Robot Interaction. Electronics 2021, 10, 561. [CrossRef]
- Shah A, Frith U. An islet of ability in autistic children: a research note. J Child Psychol Psychiatry. 1983;24:613–620. [CrossRef]
- Cabibihan, JJ., Javed, H., Ang, M. et al. Why Robots? A Survey on the Roles and Benefits of Social Robots in the Therapy of Children with Autism. Int J of Soc Robotics 5, 593–618 (2013). [CrossRef]
- Leila Takayama and Caroline Pantofaru. 2009. Influences on proxemic behaviors in human-robot interaction. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 5495–5502. [CrossRef]
- Christoph Bartneck and Jodi Forlizzi. 2004. A design-centred framework for social human-robot interaction. In Proceedings of the 13th IEEE International Workshop on Robot and Human Interactive Communication (RO-MAN’04). IEEE, 591–594. [CrossRef]
- Ekman, P.; Friesen, W.V.; O’Sullivan, M.; Chan, A.; Diacoyanni-Tarlatzis, I.; Heider, K.; Krause, R.; Lecompte, W.A.; Pitcairn, T.; Ricci-Bitti, P.E.; et al. Universals and cultural differences in the judgments of facial expressions of emotion. J. Pers. Soc. Psychol. 1987, 53, 712–717. [CrossRef]
- Graham Wilson, Dobromir Dobrev, and Stephen A. Brewster. 2016. Hot under the collar: Mapping thermal feedback to dimensional models of emotion. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems. ACM, 4838–4849. [CrossRef]
- Schrepp, M., Hinderks, A. y Thomaschewski, J. (2017). Design and Evaluation of a Short Version of the User Experience Questionnaire (UEQ-S). International Journal of Interactive Multimedia and Artificial Intelligence, 4 (6), 103-108. [CrossRef]
- Robins B, Otero N, Ferrari E, Dautenhahn K (2007) Eliciting requirements for a robotic toy for children with autism—results from user panels. In: Proc of the 16th IEEE international symposium on robot and human interactive communication (RO-MAN), pp 101–106. [CrossRef]
- Michaud F, Duquette A, Nadeau I (2003) Characteristics of mobile robotic toys for children with pervasive developmental disorders. In: Proc of the IEEE international conference on systems, man and cybernetics, pp 2938–2943. [CrossRef]
- Kozima H, Nakagawa C, Yasuda Y (2007) Children–robot interaction: a pilot study in autism therapy. Prog Brain Res 164:385. [CrossRef]
- Zabala, U.; Rodriguez, I.; Martínez-Otzeta, J.M.; Lazkano, E. Expressing Robot Personality through Talking Body Language. Appl. Sci. 2021, 11, 4639. [CrossRef]
- Michaud F, Larouche H, Larose F, Salter T, Duquette A, Mercier H, Lauria M (2007) Mobile robots engaging children in learning. In: Proc of the Canadian medical and biological engineering conference.
- Norman, D.A.: Emotional design. Basic Books, New York (2004).
Figure 6.
Ideas of design.
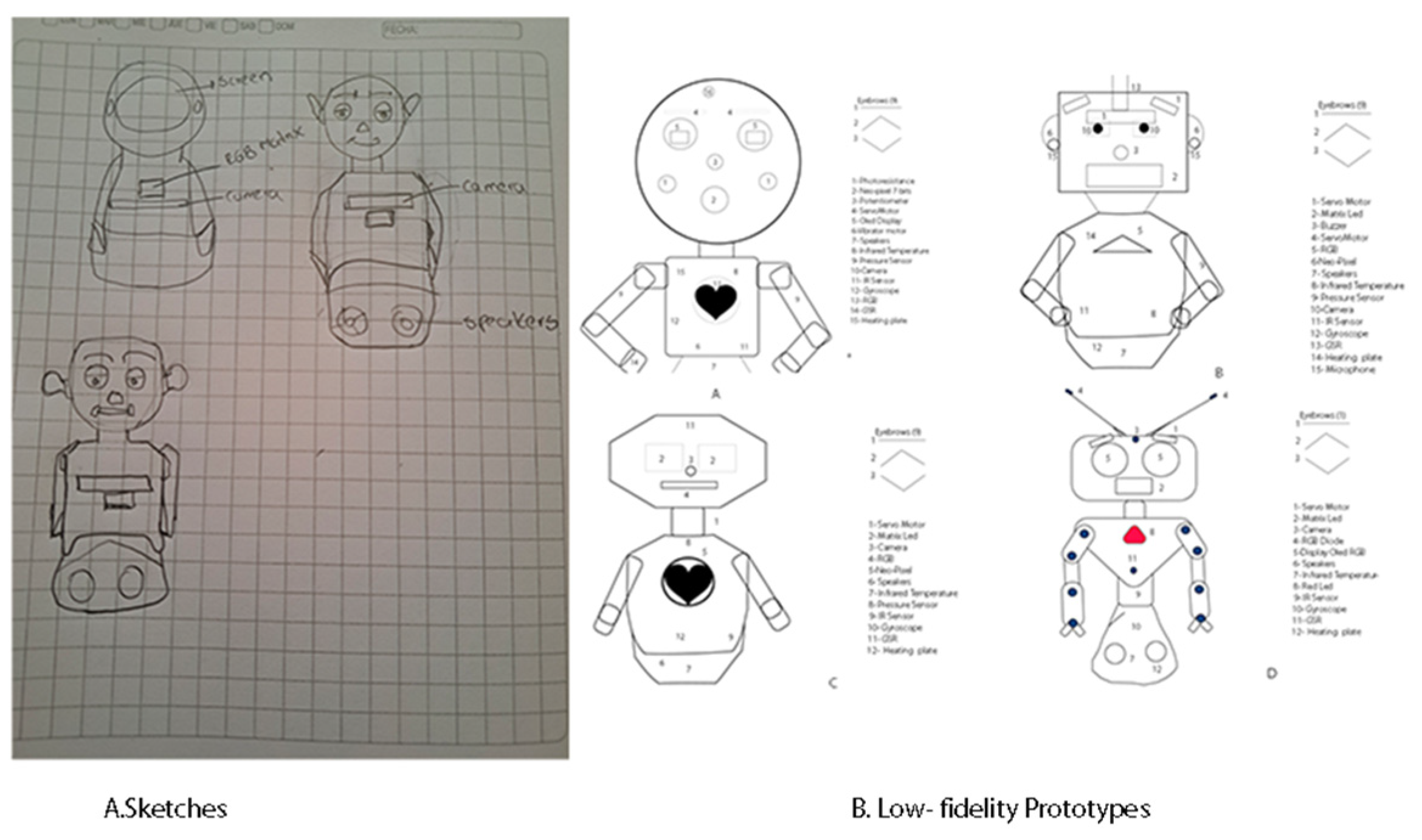
Figure 8.
Scenario of history.

Figure 9.
Some Facial Expressions of the robot partner.
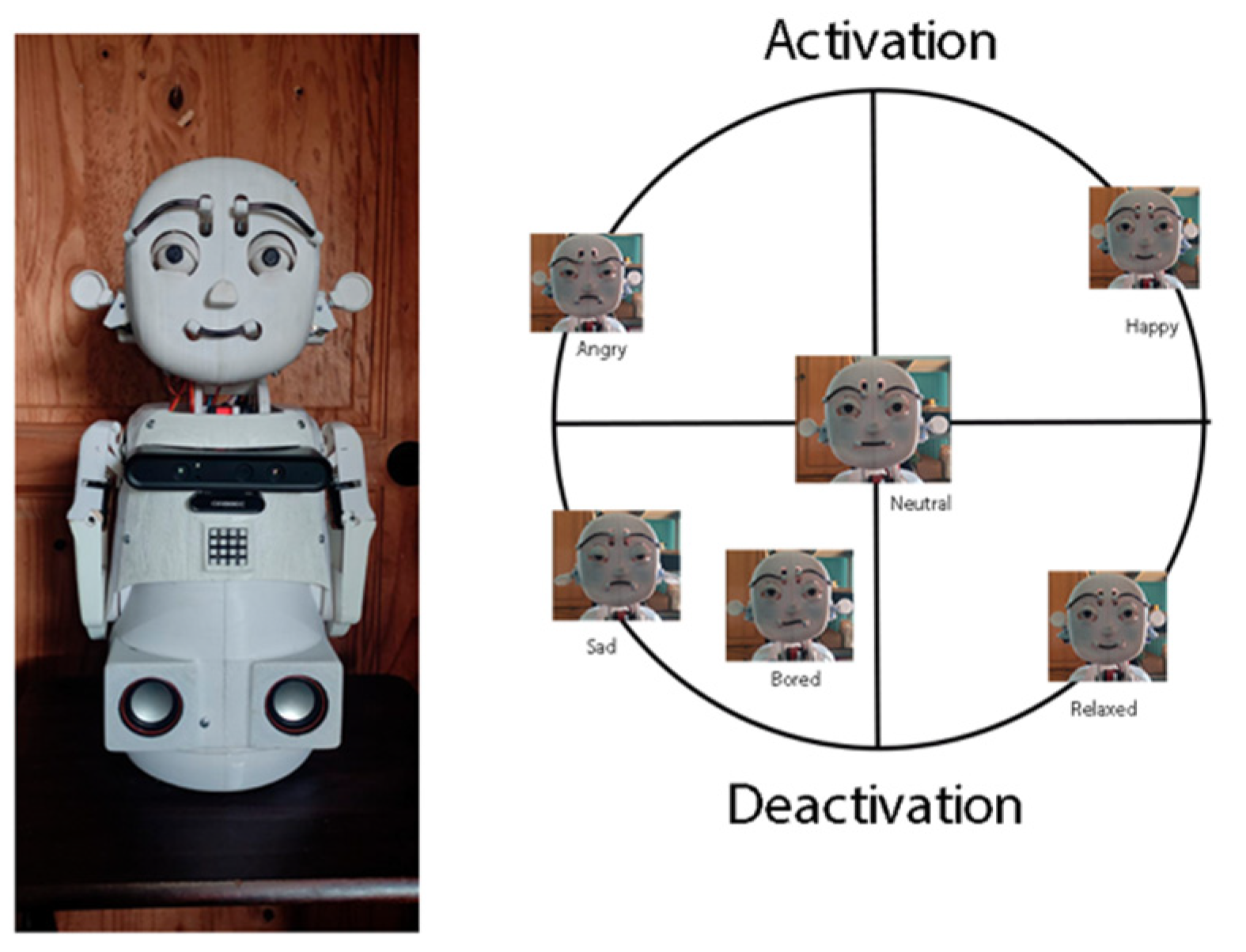
Figure 10.
Some movements of body expressions.
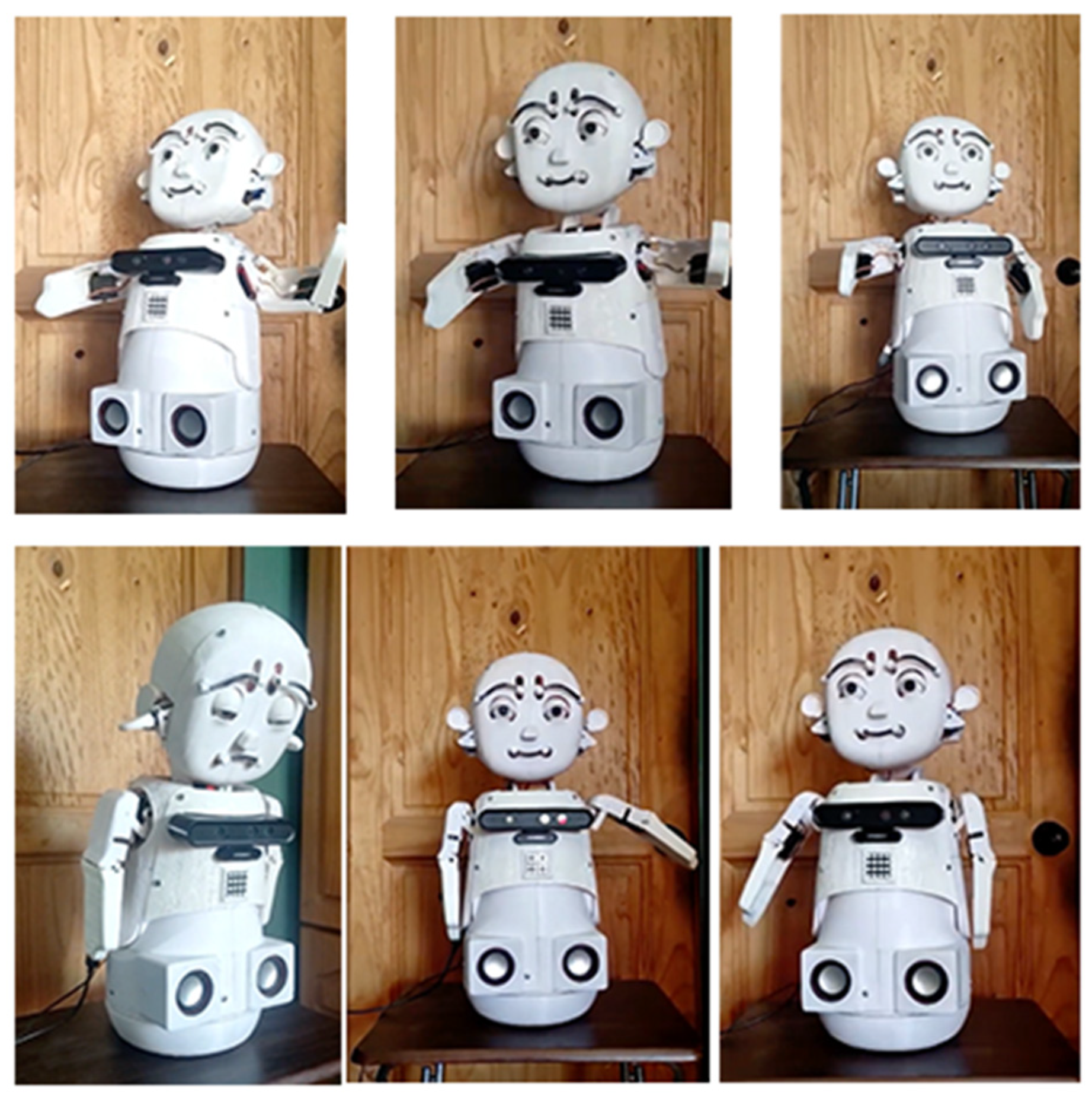
Figure 11.
Results obtained UEQ questionnaire.
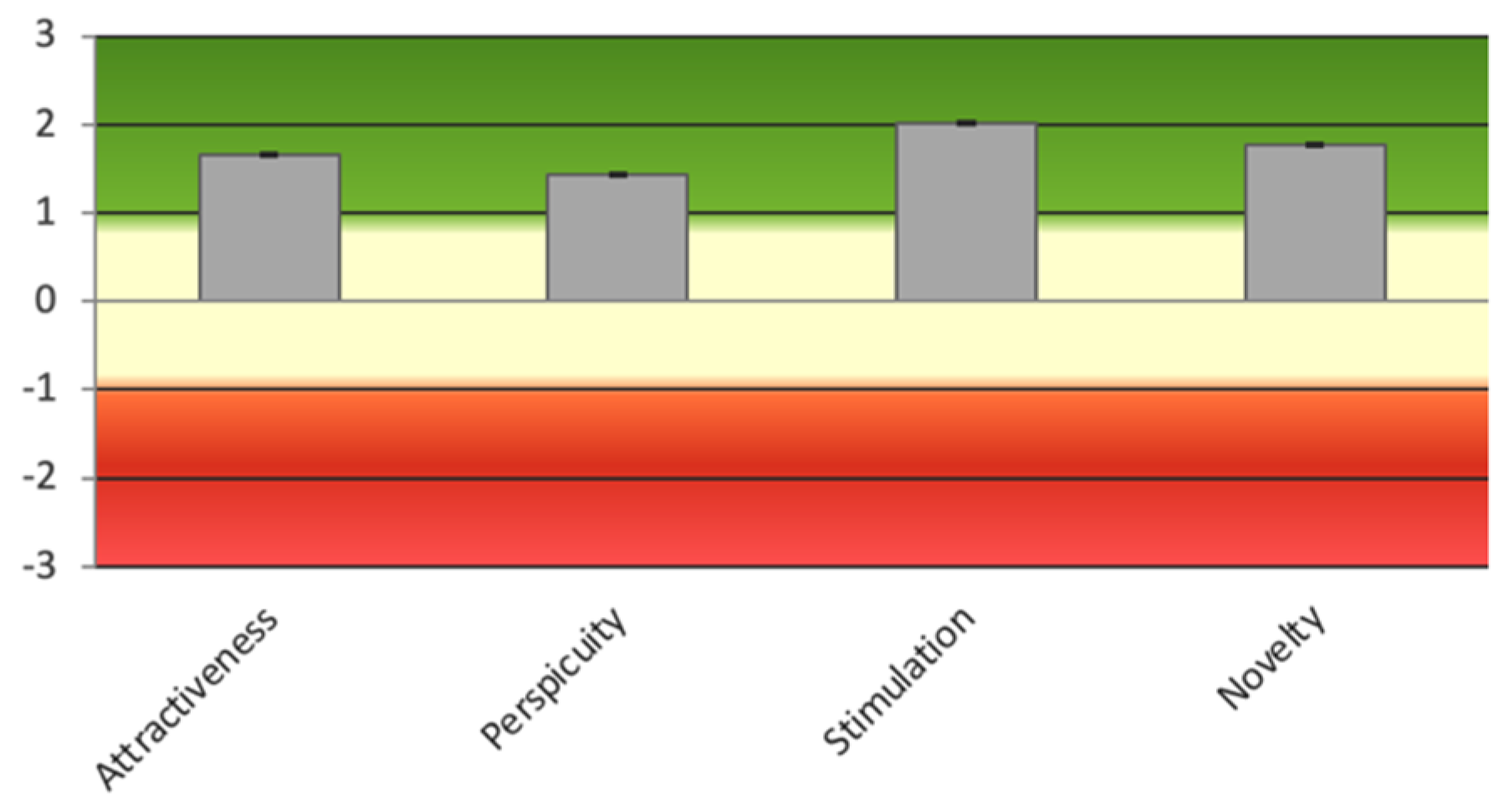
Table 3.
Pragmatic and Hedonic Quality.
| Attractiveness | 1.65 |
| Pragmatic Quality | 1.23 |
| Hedonic Quality | 1.90 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



