Submitted:
30 April 2023
Posted:
06 May 2023
Read the latest preprint version here
Abstract
This article derives the closed form solution to finding the roots of a quadratic equation in SU3.
Keywords:
Quaternion
; Quadratic Equation
; Roots
Table of Contents
| Abstract | 1 |
| Statements and Declarations | 1 |
| Classifications | 1 |
| 1 Theorem 1 The Quadratic Equation , The General Depressed Case | 3 |
| 65 Definition 1 Orthogonal Imaginary Bases | 5 |
| 70 Definition 2 A Two-Dimensional Plane in Hypercomplex Space, Absolute Shape. | 5 |
| 82 Definition 3 Affine Two Dimensional Planes Hypercomplex Space. | 6 |
| 82 Corollary 4 Parallel Two Dimensional Planes Hypercomplex Space. | 6 |
| 87 Lemma 5 Cayley Multiplication over the General Quaternions, The Square of a Quaternion, Polar and Cartesian Forms. 6 | 6 |
| 100 Definition 6 Hypercomplex Chiral Orthogonal Basis Conversion, For the Quaternions | 7 |
| 117 Theorem 7 The Lambda Choice Quaternion Eraser | 8 |
| 144 Theorem 8 The Right Triangle Theorem | 9 |
| Theorem 9 The Orthogonal Basis Rotation Theorem; The Relative Frame Theorem | 10 |
| Theorem 10 The Fully Depressed Case of the Quadratic Equation | 11 |
| Lemma 11 The Mu Part and Nu Part Equivalence. | 11 |
| Lemma 13 The Lambda Part Identity | 12 |
| Lemma 14 The Real Part Identity | 13 |
| Definition 15 Cardano’s Theorem: The Real Cubic Identity of the Nu Part | 14 |
| Definition 16 Vieta’s Theorem: The Resolution of the Nu Part. | 14 |
| Theorem 17 The Offset Circle Theorem | 15 |
| Theorem 18 The Six Root Equivalence Theorem | 16 |
| Theorem 19 The Closed Form Solution for a General Quadratic Equation for the Quaternions. | 17 |
| Appendix A: Overview of Cayley Geodesicity, Orientability, Chirality, Algebraicity | 20 |
| Algebraic Icosidgions | 20 |
| Algebraic Hexonions | 21 |
| Algebraic Octonions | 21 |
| Algebraic Sedenions | 21 |
| Appendix B: The M-th Root of N-Unity for Class of Algebraic Hypercomplex Numbers of Even Dimensions, The Great Circle Theorem | 23 |
| 405 Appendix B2: Corollary: The Square Root of a Quaternion, The Well Defined Positive and Negative Square Roots | 23 |
| Appendix C: The Quadratic Equation , The Trivial Case of Symmetric Roots, For All Hypercomplex Dimensions | 24 |
| References | 25 |
Theorem 1
The Quadratic Equation , The General Depressed Case
Quadratic Quaternionic Calculator, Closed Form Solution
https://docs.google.com/spreadsheets/d/1X8sKNNuxFq5HLq5qk-93SDVdk6yeh14Xp_OV3bVl2ZI/edit?usp=sharing
Let
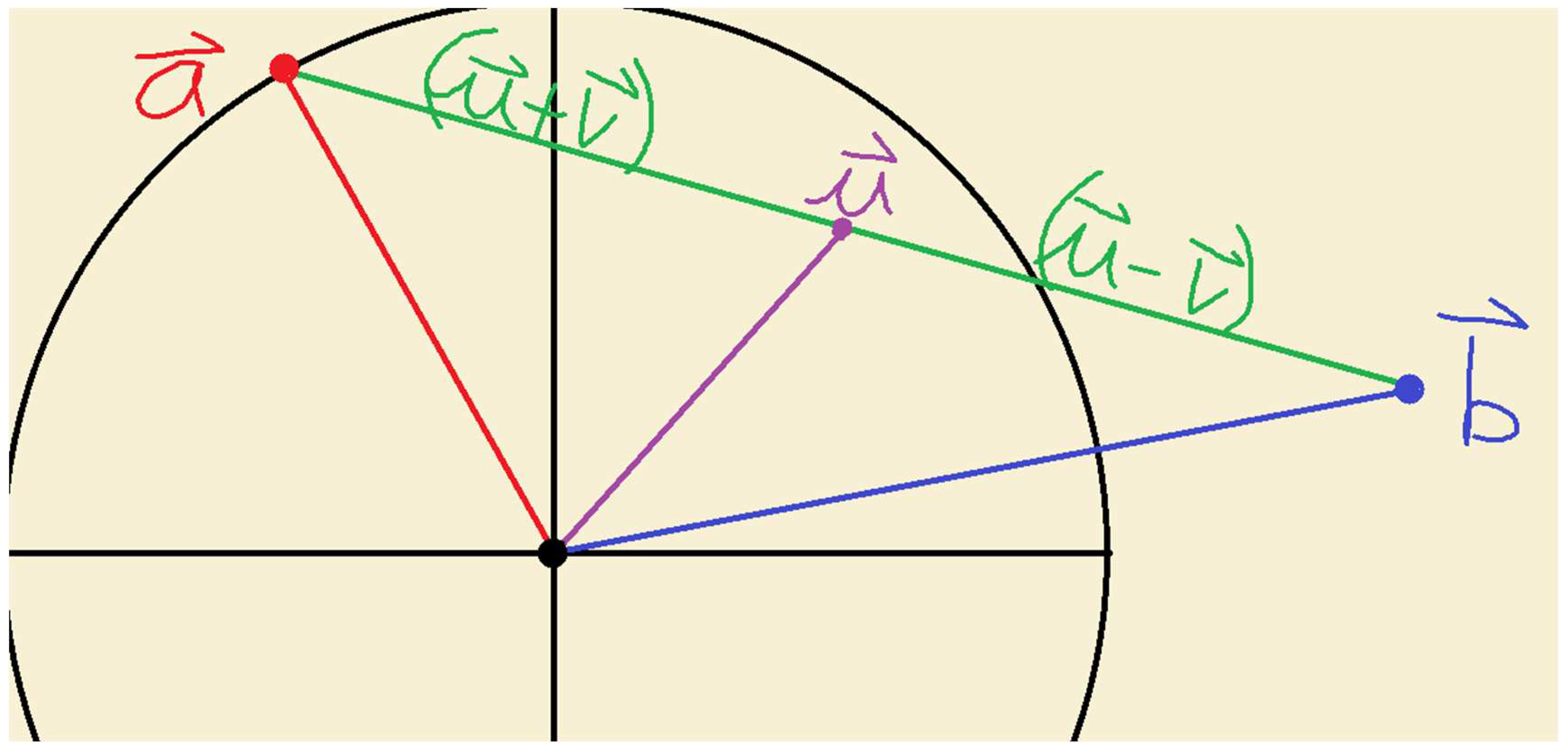
We know that there exists a two dimensional basis in the four dimensional space of quaternions that describes vectors and . Namely the bisector of the roots (mistakenly known as the Axis of Symmetry) and the straight line that is between the two roots and the bisector.
We shall define the bisector as as the first vector of the basis.
We now define the locator as
EQ.1
EQ.2 , compelling and
EQ.3 Let , therefore
EQ.4a
EQ.5
EQ.6
EQ.7
EQ.8a
EQ.9a
EQ.9b .
This is the fundamental middle handed form, from which we derive the solution.
EQ.10a Let , such that
EQ.11a
EQ.12a
EQ.13a
EQ.14a
EQ.15a
EQ.16a Let
EQ.17a . This is the second fundamental form, the left-handed form.
EQ.9b (a restatement of EQ 9a)
EQ.10b Let , such that , thence:
EQ.11b
EQ.12b
EQ.13b . This is the third fundamental form, the right-handed form.
However, before we can proceed to resolve the roots of , some general definitions and lemmas are in order.
Definition 1
Orthogonal Imaginary Unit Vector Bases
EQ.1 and ; furthermore that, and .
EQ.2 and ; furthermore that, and .
EQ.3 and ; furthermore that, and .
If, and only if:
- Let ; let ; let ; let
- . This is Lambda in respect to .
- . This is Mu in respect to .
- . This is Nu in respect to .
-
This rigid body rotation of …
- to
- to
- to
which maintains the relative spatial property that , such that:
Definition 6
Hypercomplex Chiral Orthogonal Basis Conversion, For the Quaternions
EQ.1f
Since , we are only concerned with the imaginary bases, thus:
EQ.2f
We already know that:
- ;
Let us rename the above as:
EQ.3f
EQ.4f
EQ.5f
Which yields the system of three linear equations:
EQ.5f
EQ.6f
EQ.7f
EQ8f Let 𝚪 be a 3x3 real matrix whose pairwise entries are equal to .
EQ9f Let be a 1x3 real column matrix whose entries are and respectively.
EQ10f Let =𝚪-1 , which is also a 1x3 real column matrix
Then are the respective entries of from top to bottom.
Theorem 7
The Lambda Choice Quaternion Eraser
Statement One when both and are on the same Great Circle of .
Statement Two when both and are not on the same Great Circle and is orthogonal to both and .
Proof:
EQ.1 Let , establishing as the reference frame, compelling the orthogonal basis , then:
EQ.2 Let
EQ.3
EQ.4 , since they commute upon the same Great Circle.
EQ.5
EQ.6
EQ.7 , such that is orthogonal to , vanishing and and .
Q.E.D.
Likewise we could establish as the reference frame via: , compelling the orthogonal basis , and the expression
will result in vector that is also orthogonal to , vanishing the real part and part of , leaving only and as the remaining dimensions.
Regardless of which reference frame we choose, we know that is orthogonal to both and , and, by definition, anything in the form of
is strictly orthogonal to ; however, not everything in form of is strictly orthogonal to .
However, the most important takeaway is that , meaning the real part of , which is , has no effect; thus, the equation remains equal to , no matter the real parts of either or , nor the lambda part of , thus and are erased from existence, allowing us to reduce the equation to (let and be positive reals):
Theorem 8
The Right Triangle Theorem
Thence, the expression: geometrically compels to be the hypotenuse of a right triangle, since is orthogonal to both and its square, as both and lay upon the same Great Circle.
Although there exists an entire family of right triangles that share as the hypotenuse, there are only two congruent right triangles within this family that satisfy .
EQ.1 , which is the orthogonal basis in respect to .
EQ.2
EQ.3 is orthogonal to by definition. We shall choose this orthogonality to generate the family of solutions.
EQ.4 is orthogonal to by definition. We discard this orthogonality in favor of the former.
EQ.5
EQ.6
EQ.7
EQ.8 Let
EQ.9 Let
EQ.10 Let
EQ.11
EQ.12
EQ.13
EQ.14
The above relationship provides us with enough information to brute the roots of the quadratic equation by simply comparing every value of the angular argument of against the real number magnitude of error from the return on in a preliminary search, and then converge rapidly upon the roots via bisection.
In fact, it was by empirical observation of the roots (using the above rapidly convergent algorithm) that I was able to resolve the closed form solution. We shall first simplify the quadratic equation further in lieu of those empirical results.
Theorem 9
The Orthogonal Basis Rotation Theorem; The Relative Frame Theorem
EQ.1 Let
EQ.2a
EQ.2b
EQ.3
We are able to perform this basis conversion because all we did was rotate about ; hence, preserves the multiplicative relationships 171 expected in the original basis. In fact, there is no preferred frame of reference for the and axes for an Observer on the Great Circle of , only is absolute from the Observer’s perspective. The Observer is free to rotate the axes in any manner that simplifies the existing problem.
Thus, in the equation , the variable establishes , and the variables establishes and .
Theorem 10
The Fully Depressed Case of the Quadratic Equation
We now combine Theorems 14 and 15 to yield the fully depressed case of the quadratic equation.
EQ.1a , where is in respect to .
EQ.1b
EQ.1c , where is the initial orthogonal basis in respect to .
EQ.2a Let
EQ.2b Let
EQ.2c Let
EQ.2d Let
EQ.2e Let
EQ.3a
EQ.3b
EQ.3c (Lambda Choice Quaternion Eraser)
EQ.4a
EQ.4b
EQ.4c
EQ.4d
Lemma 11
The Mu Part and Nu Part Equivalence.
EQ.5a
EQ.5b
EQ.5c
EQ.6a
EQ.6b
EQ.6c
EQ.7a
EQ.7b
EQ.7c .
Lemma 12
The Real Part and Nu Part Equivalence.
EQ.1a
EQ.1b
EQ.2a
EQ.2b
EQ.2c
EQ.2d
EQ.3a
EQ.3b
EQ.3c
EQ.3d
Lemma 13
The Lambda Part Identity
EQ.1
EQ.2
EQ.3
Lemma 14
The Real Part Identity
EQ.1
EQ.2
EQ.3
EQ.4
EQ.5
EQ.6
EQ.7
EQ.8
EQ.9
EQ.10
EQ.11
EQ.12
EQ.13
EQ.14
EQ.15
EQ.16
EQ.17 EQ.17a
EQ.17b
EQ.17c
EQ.17d
Definition 15
Cardano’s Theorem: The Real Cubic Identity of the Nu Part
We now use the Cardano Method to depress the Cubic of the Nu Part.
EQ.1
EQ.2
EQ.3
EQ.4
EQ.5 Completing Cardano’s depression of the Cubic. We now implement Vieta’s Substitution:
Definition 16
Vieta’s Theorem: The Resolution of the Nu Part.
EQ.1
EQ.2
EQ.3
EQ.4
EQ.5
EQ.6
EQ.7 , either sign of the square root shall suffice.
EQ.8
EQ.9
We now use the identities from to yield and .
EQ.10
EQ.11
EQ.12
Of course, we have a serious dilemma. Which of the three real roots do we accept for ? Which sign of the above squares do we choose in unison? Only the polar form of solution will elucidate which root of to accept, and then how to produce and .
Theorem 17
The Offset Circle Theorem
For the moment, let us suppose we know which cubic root to select as , then we now examine the following relationship: . This equation informs us that the coordinate lays upon a circle, with a radius of , offset from the origin by .
Let , then the Law of Cosines reveals that:
EQ.1
EQ.2
EQ.3 , upholding the Law of Sines.
We now examine the relationship .
EQ.4
EQ.5
EQ.6
EQ.7
EQ.8
EQ.9
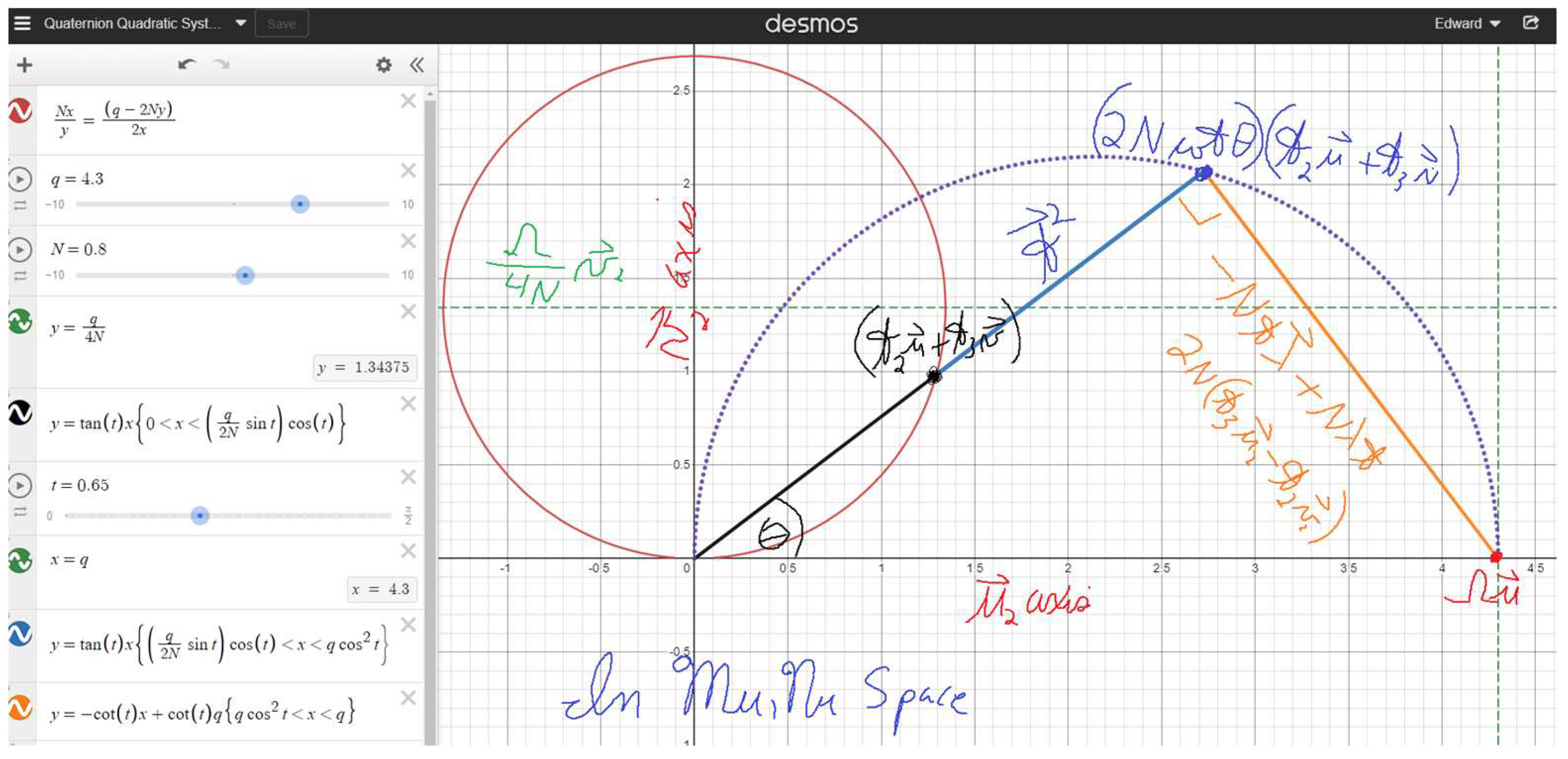
EQ.10 , which leads to a nasty degree six equation with 6 pairs of conjugate solutions for .
Before we proceed, the below image is the geometric appearance of the question at hand in space.
In the following url link, is Omega, N is N, and t is theta: https://www.desmos.com/calculator/q2bfcbs7wq
However, when we yield the roots of the cubic to produce we can solve for theta without any of the hassle that the polar form introduces.
EQ.11
EQ.12
EQ.13
EQ.14
EQ.15 . We know to take the positive root, since the coordinate resides in the first quadrant, since both magnitude variables, and , are positive by definition, forcing the red circle (in the above image) in the upper two quadrants. We also both angles for the Arcsine function. This is not because we cannot resolve the ambiguity; rather, both solutions fulfill simultaneously. Hence:
EQ.16 ; yielding the empirically observed form: , where has no part.
With both values of theta known, we simply use the identities above to yield
EQ.17a
EQ.17b . Q.E.D.
Theorem 18
Which Root Theorem
We shall use the randomly generated components of seen below to demonstrate that all three roots of are valid by symmetry.
The resultant equation
Has the roots, accepting the angular argument of

The three roots for are as follows:
.
for
for
for
That is, all three Arcsine arguments of produce the same vector after recombination. In other words, a Quadratic Equation over the Quaternions has one pair of roots with four real coefficients, and two pairs of roots with three purely imaginary coefficients for and one pure real coefficient for .
However, the geometric meaning of complex coefficients remains unclear. For now, we accept the guaranteed real argument for Q.E.D.
Theorem 19
The Closed Form Solution for a General Quadratic Equation for the Quaternions.
We now combine all of the steps to solve original query:
EQ.1
EQ.2 Let
EQ.3
EQ.4
EQ.5
EQ.6 Let , therefore
EQ.7
EQ.8 Let
EQ.9
EQ.10
EQ.11
EQ.12
EQ.13
EQ.14
EQ.15
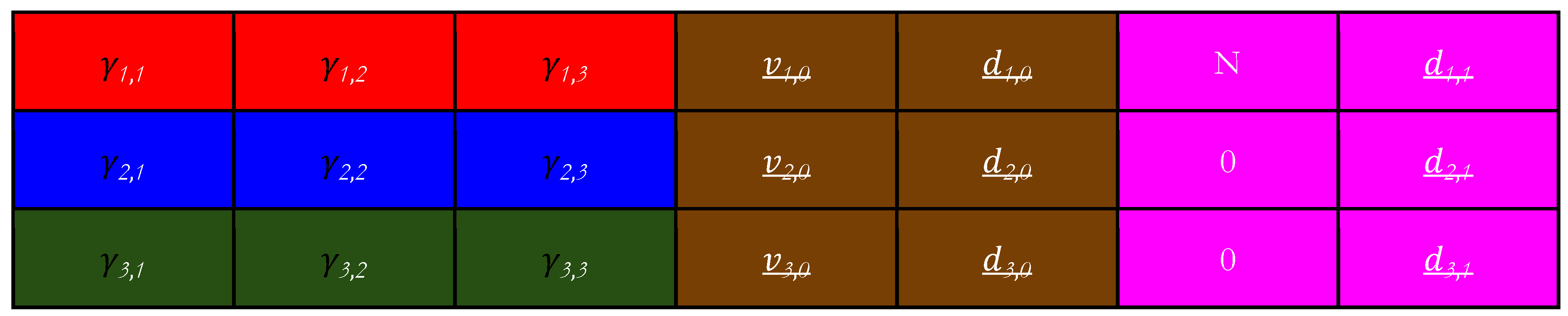
EQ.16 Let 𝚪 be a 3x3 real matrix whose pairwise entries are equal to .
EQ.17 Let be a 1x3 real column matrix whose entries are and respectively.
EQ.18 Let be a 1x3 real column matrix whose entries are and respectively.
EQ.19 Let 𝐕 =𝚪 , which is also a 1x3 real column matrix, let it the results be named . is our first primary variable.
EQ.20 Let =𝚪 , which is also a 1x3 real column matrix, let it the results be named We do not require the inverse Gamma Matrix for this process.
𝚪 Gamma Matrix Matrix Matrix 𝚪 = Matrix 𝚪 = Matrix
EQ.21
EQ.22
EQ.23
EQ.24
EQ.25
EQ.26
EQ.27
EQ.28
EQ.29
EQ.30
EQ.31
EQ.32
EQ.33
EQ.34
EQ.35
EQ.36
EQ.37
EQ.38
EQ.39
EQ.40
EQ.41
EQ.42
EQ.43 , either sign of the square root shall suffice, and any cube root will suffice.
EQ.44
EQ.45 . All roots will be real.
EQ.46 . If is a complex number, then is the imaginary unit.
We evaluate for all three roots of and select the real-valued argument. Hopefully someone will elucidate the meaning of the complex arguments in due time, for I dare not feign knowledge of their geometric interpretation.
EQ.47
EQ.48
The above two equations are the roots in the proper orthogonal basis of , however we must now convert back to .
EQ.49
EQ.50
EQ.51
EQ.52
EQ.53
EQ.54
EQ.55
EQ.56
EQ.57
EQ.58
Recall that and therefore and that .
EQ.59
EQ.60
EQ.61
EQ.62
EQ.63
The above two equations satisfy the original query , proving that all Quadratic Equations over the Quaternions adhere to the same closed form solution.
Q.E.D.
Appendix B: The M-th Root of N-Unity for Class of Algebraic Hypercomplex Numbers of Even Dimensions, The Great Circle Theorem
Assuming that we are in a Hypercomplex Space that is Cayley Algebraic, then let be the function that returns the principal root unity for .
EQ.11d Let be the observation vector.
EQ.12d Let be the set of pairwise orthogonal imaginary unit vectors, and must be odd, such that is even.
EQ.13d Let such that
EQ.14d Let , which is the real number magnitude of the imaginary part of .
EQ.15d Let , which is the real number magnitude of .
EQ.16d Let , compelling to be a unit vector.
EQ.17d Let , giving us the ratio between the magnitudes of the real part and the imaginary part.
EQ.18d Let , that is, the four-quadrant arccotagent of .
EQ.19d
EQ.20d
Appendix B.2: Corollary: The Square Root of a Quaternion, The Well Defined Positive and Negative Square Roots
For a quaternion , the square root is given by:
EQ.21d
Appendix C: The Quadratic Equation , The Trivial Case of Symmetric Roots, For All Hypercomplex Dimensions
EQ.1e can be readily solved for even if and are not on the same Great Circle.
EQ.2e Let , such that
EQ.3e
EQ.4e
EQ.5e
EQ.6e
EQ.7e
EQ.8e
EQ.9e
Q.E.D
It is our goal to transform the earlier equation, , into the Symmetric Case via a series of additional substitutions.
The Symmetric Case occurs when .
Statements and Declarations: I have nothing to declare.
Quadratic Quaternionic Calculator, Closed Form Solution
https://docs.google.com/spreadsheets/d/1X8sKNNuxFq5HLq5qk-93SDVdk6yeh14Xp_OV3bVl2ZI/edit?usp=sharing

References
- Available online: https://mathworld.wolfram.com/VietasSubstitution.
- Available online: https://www.math.ucdavis.edu/~kkreith/tutorials/sample.lesson/cardano.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Copyright: This open access article is published under a Creative Commons CC BY 4.0 license, which permit the free download, distribution, and reuse, provided that the author and preprint are cited in any reuse.



